

Physics-Aware Machine Learning Approach for High-Precision Quadcopter Dynamics Modeling

 ,
,  ,
,  , and
, and
Abstract
1. Introduction
1.1. Motivation
1.2. Our Contribution
1.3. Structure of the Paper
2. State-of-the-Art in Quadcopter Dynamics Modeling
2.1. Mathematical Model of Quadcopter Dynamics
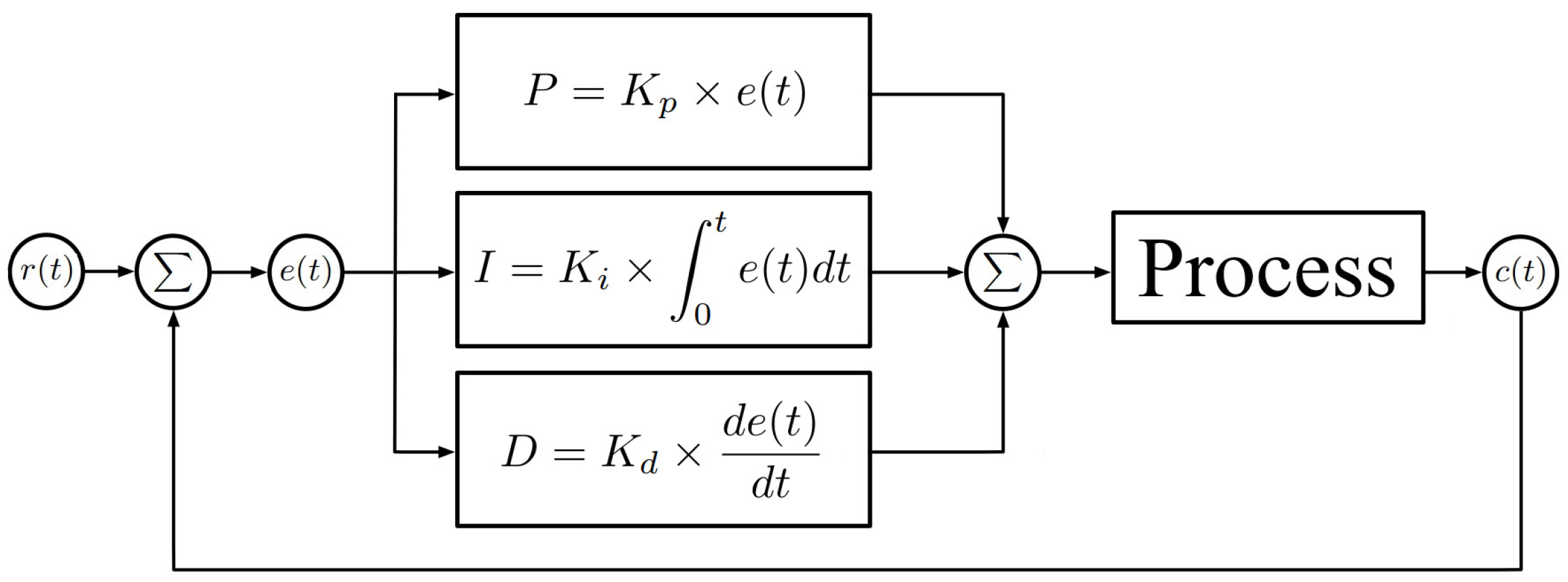
2.2. Proportional–Integral–Derivative Controller
3. The Proposed Physics-Informed Neural Network for Quadcopter Dynamics Modeling
3.1. Fractional Optimization Algorithms
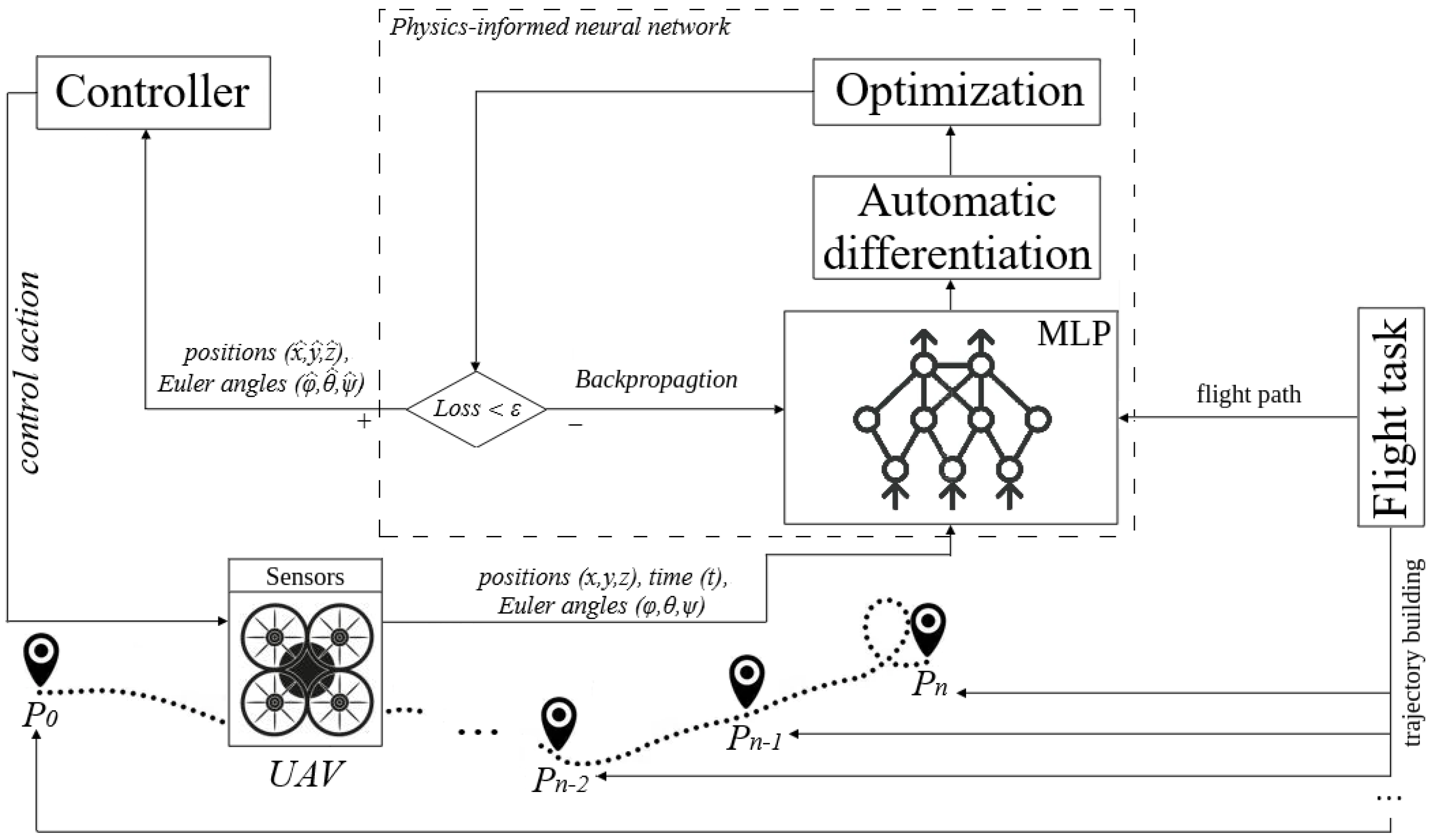
3.2. The Proposed Physics-Aware Machine Learning Controller
| Algorithm 1: Physics-informed neural network algorithm with fractional gradient descent for UAV dynamics modeling. |
| Input: (input data), (desired output), (weights), (activation function), (weight decay), (momentum), (damping), (type of fractional derivative) Output: (approximate solution), (loss function)
|
4. Experiments on Quadcopter Flight Dynamics
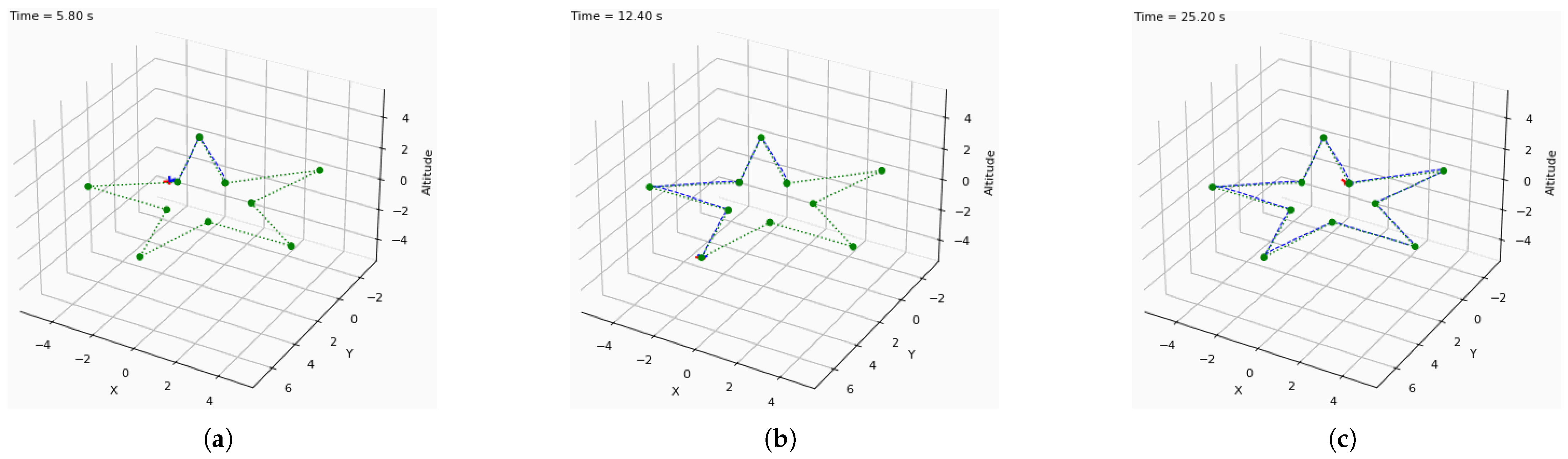
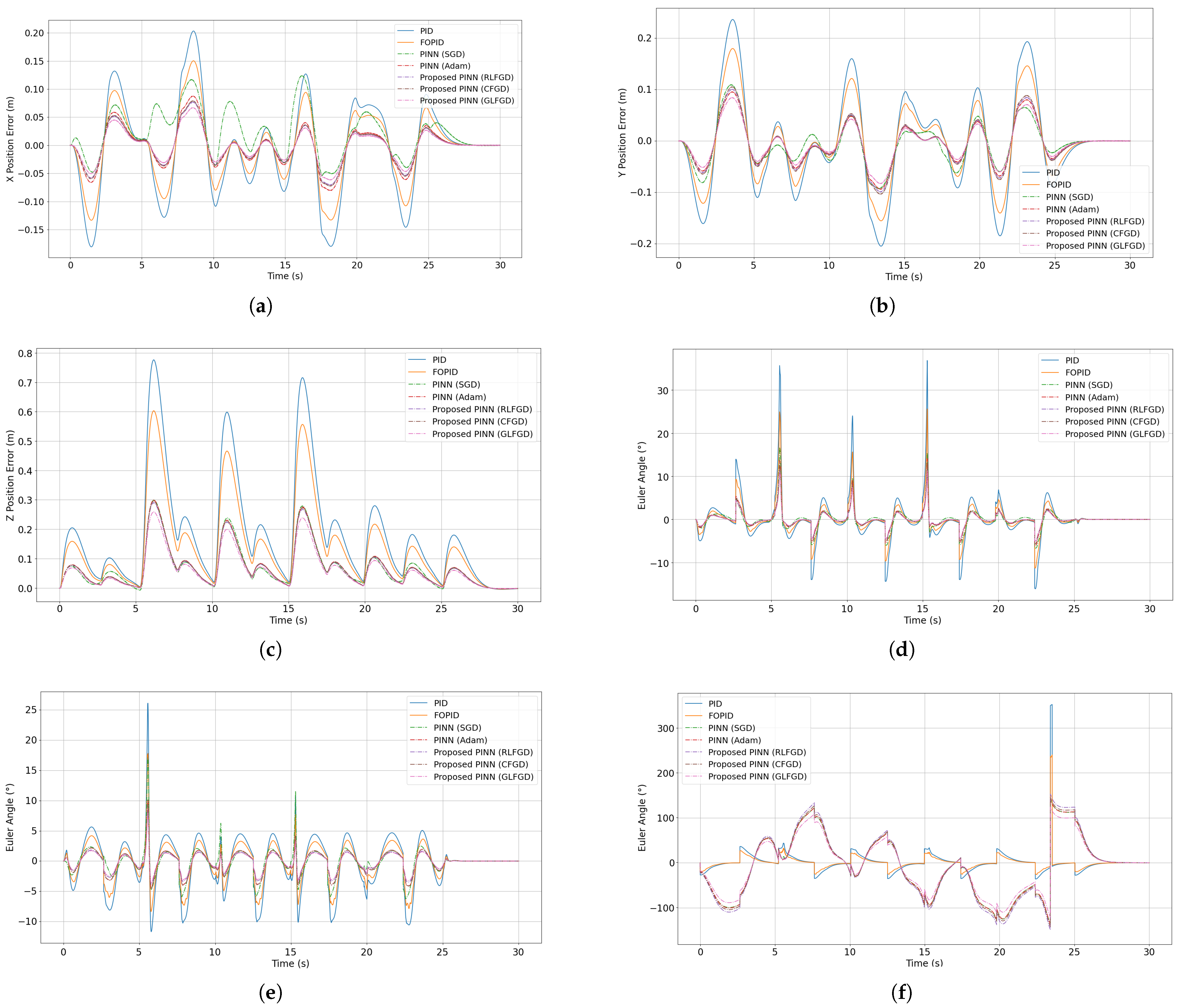
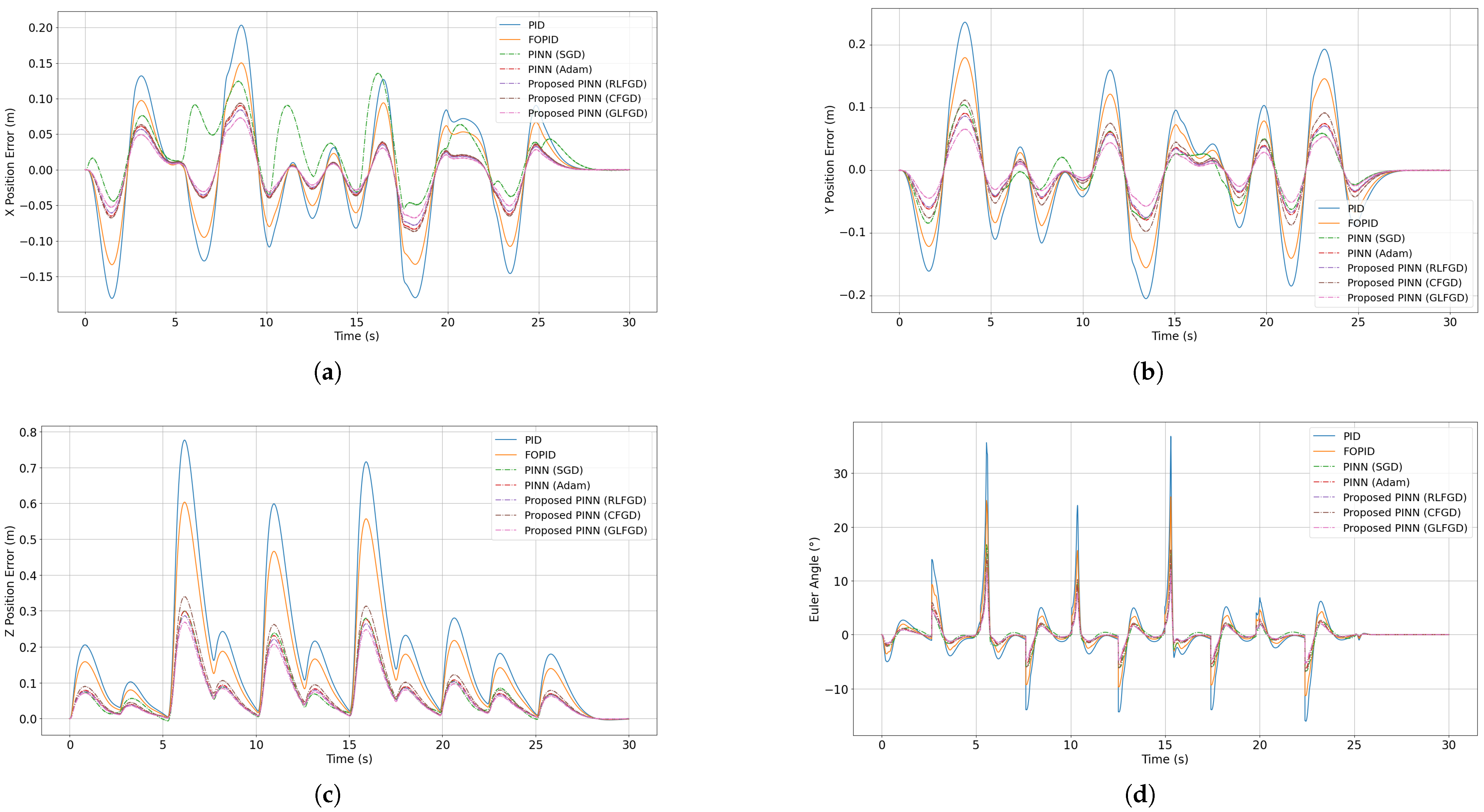
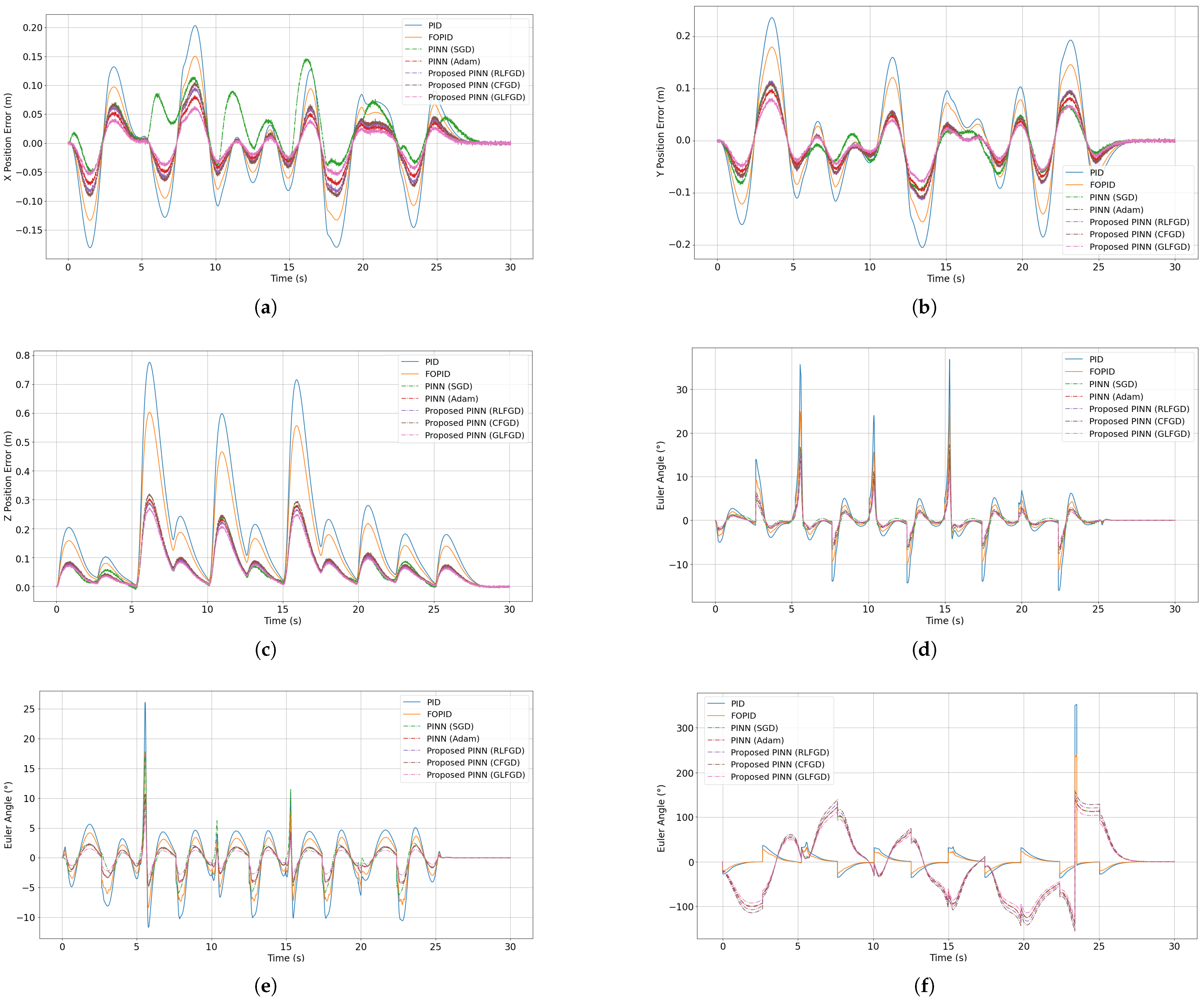
4.1. Results of the Proposed Physics-Informed Controller on Quadcopter Dynamics
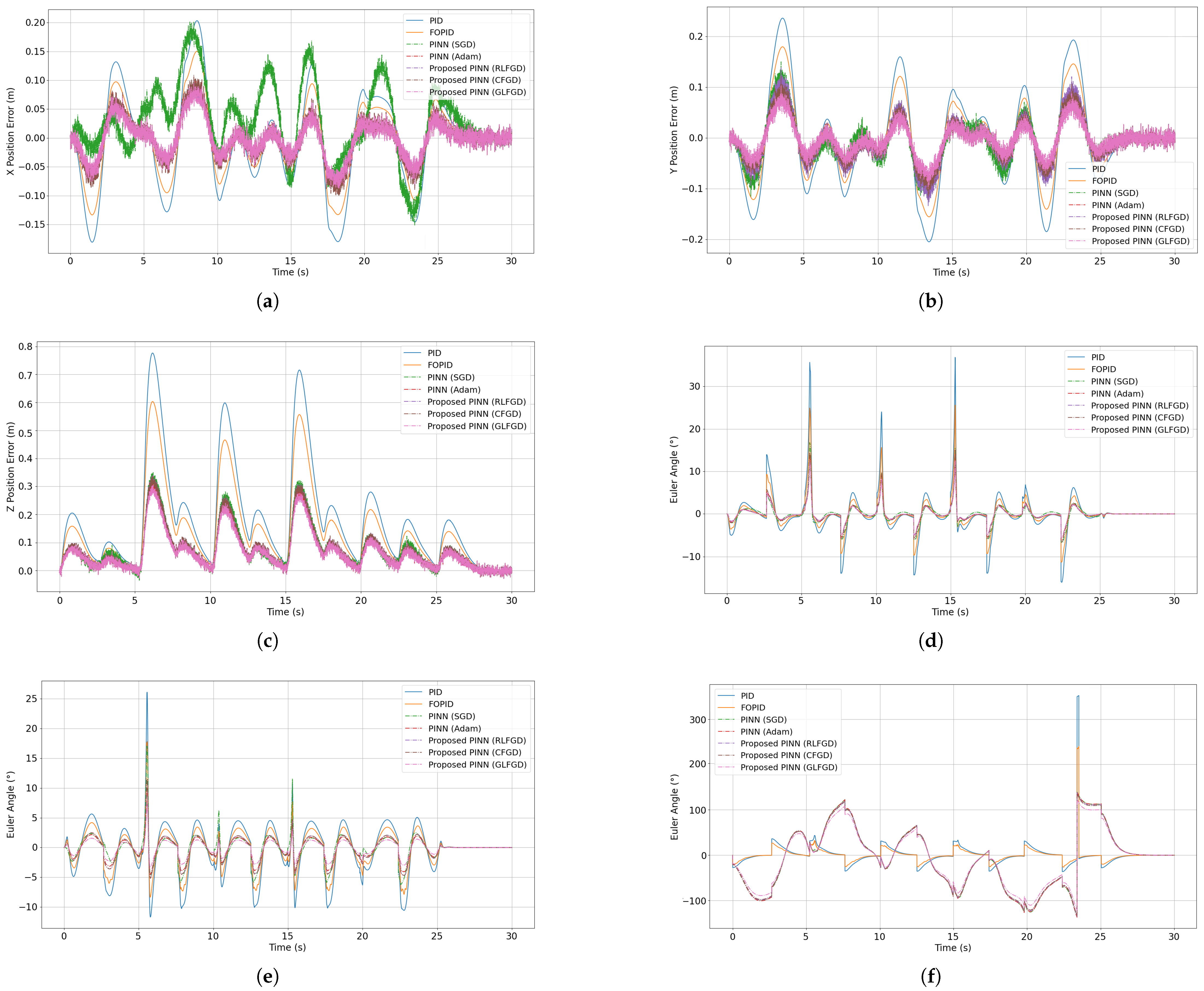
4.2. Ablation Study
4.3. Steady State Performance
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
DURC Statement
Conflicts of Interest
References
- Su, J.; Zhu, X.; Li, S.; Chen, W.H. AI meets UAVs: A survey on AI empowered UAV perception systems for precision agriculture. Neurocomputing 2023, 518, 242–270. [Google Scholar] [CrossRef]
- Lee, H.-W. Research on multi-functional logistics intelligent Unmanned Aerial Vehicle. Eng. Appl. Artif. Intell. 2022, 116, 105341. [Google Scholar] [CrossRef]
- Dudukcu, H.V.; Taskiran, M.; Kahraman, N. UAV sensor data applications with deep neural networks: A comprehensive survey. Eng. Appl. Artif. Intell. 2023, 123, 106476. [Google Scholar] [CrossRef]
- Ai, D.; Jiang, G.; Lam, S.K.; He, P.; Li, C. Computer vision framework for crack detection of civil infrastructure—A review. Eng. Appl. Artif. Intell. 2023, 117, 105478. [Google Scholar] [CrossRef]
- Somanagoudar, A.G.; Mérida, W. Weather-aware energy management for unmannedaerial vehicles: A machine learning application with global data integration. Eng. Appl. Artif. Intell. 2025, 139, 109596. [Google Scholar] [CrossRef]
- Yongjun, D.; Jianhong, W.; Jinlong, Z.; Xi, L. Design of quadcopter attitude controller based on data-driven model-free adaptive sliding mode control. Int. J. Dynam. Control 2024, 12, 1404–1414. [Google Scholar] [CrossRef]
- Sahrir, N.H.; Basri, M.A.M. PSO–PID Controller for Quadcopter UAV: Index Performance Comparison. Arab. J. Sci. Eng. 2023, 48, 15241–15255. [Google Scholar] [CrossRef]
- Lopez-Sanchez, I.; Moreno-Valenzuela, J. PID control of quadrotor UAVs: A survey. Annu. Rev. Control 2023, 56, 100900. [Google Scholar] [CrossRef]
- Ihnak, M.S.A.; Edardar, M.M. Comparing LQR and PID Controllers for Quadcopter Control Effectiveness and Cost Analysis. In Proceedings of the IEEE 11th International Conference on Systems and Control (ICSC), Sousse, Tunisia, 18–20 December 2023. [Google Scholar]
- Mardlijah; Alifah, Z.N. Control Design of Quadcopter using Linear Quadratic Gaussian (LQG). In Proceedings of the International Conference on Computer Engineering, Network, and Intelligent Multimedia (CENIM), Surabaya, Indonesia, 22–23 November 2022. [Google Scholar]
- Berberich, J.; Köhler, J.; Müller, M.A.; Allgöwer, F. Data-Driven Model Predictive Control With Stability and Robustness Guarantees. IEEE Trans. Autom. Control 2021, 66, 1702–1717. [Google Scholar] [CrossRef]
- Madani, T.; Benallegue, A. Backstepping Control for a Quadrotor Helicopter. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3255–3260. [Google Scholar] [CrossRef]
- Baek, J.; Kang, M. A Synthesized Sliding-Mode Control for Attitude Trajectory Tracking of Quadrotor UAV Systems. IEEE/ASME Trans. Mechatron. 2023, 28, 2189–2199. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Ren, B. Energy Saving Quadrotor Control for Field Inspections. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1768–1777. [Google Scholar] [CrossRef]
- Bisheban, M.; Lee, T. Geometric Adaptive Control With Neural Networks for a Quadrotor in Wind Fields. IEEE Trans. Control Syst. Technol. 2021, 29, 1533–1548. [Google Scholar] [CrossRef]
- Chang, X.-H.; Liu, X.-M.; Hou, L.-W.; Qi, J.-H. Quantized Fuzzy Feedback Control for Electric Vehicle Lateral Dynamics. IEEE Trans. Syst. Man, Cybern. Syst. 2024, 54, 2331–2341. [Google Scholar] [CrossRef]
- Guan, Y.; Zou, S.; Peng, H.; Ni, W.; Sun, Y.; Gao, H. Cooperative UAV Trajectory Design for Disaster Area Emergency Communications: A Multiagent PPO Method. IEEE Internet Things J. 2024, 11, 8848–8859. [Google Scholar] [CrossRef]
- Zhang, J.; Li, C.; Yin, Y.; Zhang, J.; Grzegorzek, M. Applications of artificial neural networks in microorganism image analysis: A comprehensive review from conventional multilayer perceptron to popular convolutional neural network and potential visual transformer. Artif. Intell. Rev. 2023, 56, 1013–1070. [Google Scholar] [CrossRef] [PubMed]
- Camps-Valls, G.; Svendsen, D.H.; Cortés-Andrés, J.; Mareno-Martínez, Á.; Pérez-Suay, A.; Adsuara, J.; Martino, L. Physics-Aware Machine Learning for Geosciences and Remote Sensing. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021. [Google Scholar]
- Abdulkadirov, R.; Lyakhov, P.; Nagornov, N. Survey of Optimization Algorithms in Modern Neural Networks. Mathematics 2023, 11, 2466. [Google Scholar] [CrossRef]
- Kunwar, B.; Rajput, R.K.S.; Mathpal, T.; Pandey, S.; Dibyanshu. Study of Quadcopter Movement Using CFD and PID with Numerical Methods. In Advances in Mathematical Modeling, Applied Analysis and Computation; Singh, J., Anastassiou, G.A., Baleanu, D., Kumar, D., Eds.; ICMMAAC 2023, Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2023; Volume 952. [Google Scholar]
- Sahli, F.; Simone, C.; Perdikaris, P.P. Δ-PINNs: Physics-informed neural networks on complex geometries. Eng. Appl. Artif. Intell. 2024, 127, 107324. [Google Scholar] [CrossRef]
- Ramirez, I.; Pino, J.; Pardo, D.; Sanz, M.; del Rio, L.; Ortiz, A.; Aizpurua, J.I. Residual-based attention Physics-informed Neural Networks for spatio-temporal ageing assessment of transformers operated in renewable power plants. Eng. Appl. Artif. Intell. 2025, 139, 109556. [Google Scholar] [CrossRef]
- Hou, S.; Liu, Y. Early warning of tunnel collapse based on Adam-optimised long short-term memory network and TBM operation parameters. Eng. Appl. Artif. Intell. 2022, 112, 104842. [Google Scholar] [CrossRef]
- Sowmya, R.; Premkumar, M.; Jangir, P. Newton-Raphson-based optimizer: A new population-based metaheuristic algorithm for continuous optimization problems. Eng. Appl. Artif. Intell. 2024, 128, 107532. [Google Scholar] [CrossRef]
- Abdulkadirov, R.I.; Lyakhov, P.A.; Baboshina, V.A.; Nagornov, N.N. Improving the Accuracy of Neural Network Pattern Recognition by Fractional Gradient Descent. IEEE Access 2024, 12, 168428–168444. [Google Scholar] [CrossRef]
- Bianchi, D.; Epicoco, N.; Di Ferdinando, M.; Di Gennaro, S.; Pepe, P. Physics-Informed Neural Networks for Unmanned Aerial Vehicle System Estimation. Drones 2024, 8, 716. [Google Scholar] [CrossRef]
- Sharma, P.; Saurav, S.; Singh, S. Object detection in power line infrastructure: A review of the challenges and solutions. Eng. Appl. Artif. Intell. 2024, 130, 107781. [Google Scholar] [CrossRef]
- Saranya, T.; Deisy, C.; Sridevi, S.; Anbananthen, K.S.M. A comparative study of deep learning and Internet of Things for precision agriculture. Eng. Appl. Artif. Intell. 2023, 122, 106034. [Google Scholar] [CrossRef]
- Zhu, F.; Li, H.; Li, J.; Zhu, B.; Lei, S. Unmanned aerial vehicle remote sensing image registration based on an improved oriented FAST and rotated BRIEF- random sample consensus algorithm. Eng. Appl. Artif. Intell. 2023, 126, 106944. [Google Scholar] [CrossRef]
- Liu, D.C.; Nocedal, J. On the limited memory BFGS method for large scale optimization. Math. Program. 1989, 45, 503–528. [Google Scholar] [CrossRef]
- Byrd, R.H.; Khalfan, H.F.; Schnabel, R.B. Analysis of a Symmetric Rank-One Trust Region Method. SIAM J. Optim. 1996, 6, 1025–1039. [Google Scholar] [CrossRef]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the International Conference on Intelligent Robots and Systems, Abu Dhabi, UAE, 14 October–18 October 2024; pp. 2451–2456. [Google Scholar]
- Wu, H.-P.; Li, L. The BP neural network with Adam optimizer for predicting audit opinions of listed companies. IAENG Int. J. Comput. Sci. 2021, 48, 364–368. [Google Scholar]
- Zhang, Y.; Zhang, W.; Bald, S.; Pingali, V.; Chen, C.; Goswami, M. Stability of SGD: Tightness analysis and improved bounds. In Proceedings of the Thirty-Eighth Conference on Uncertainty in Artificial Intelligence. PMLR 2022, 180, 2364–2373. [Google Scholar]
- Thanh, H.L.N.N.; Hong, S.K. Quadcopter Robust Adaptive Second Order Sliding Mode Control Based on PID Sliding Surface. IEEE Access 2018, 6, 66850–66860. [Google Scholar] [CrossRef]
- Mirghasemi, S.A.; Necsulescu, D.; Sasiadek, J. Quadcopter Fractional Controller Accounting for Ground Effect. In Proceedings of the 12th International Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 8–10 July 2019. [Google Scholar]
- Gu, W.; Primatesta, S.; Rizzo, A. Physics-informed Neural Network for Quadrotor Dynamical Modeling. Robotics and Autonomous Systems 2024, 171, 104569. [Google Scholar] [CrossRef]
- Mohapatra, R.; Saha, S.; Coello, C.A.C.; Bhattacharya, A.; Dhavala, S.S.; Saha, S. AdaSwarm: Augmenting Gradient-Based Optimizers in Deep Learning With Swarm Intelligence. IEEE Trans. Emerg. Top. Comput. Intell. 2022, 6, 329–340. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, W.; Wang, X.; Qiu, Y.; Shen, W. Adaptive gradient descent enabled ant colony optimization for routing problems. Swarm Evol. Comput. 2022, 70, 101046. [Google Scholar] [CrossRef]
- Şener, R.; Koç, M.A.; Ermiş, L. Hybrid ANFIS-PSO algorithm for estimation of the characteristics of porous vacuum preloaded air bearings and comparison performance of the intelligent algorithm with the ANN. Eng. Appl. Artif. Intell. 2024, 128, 107460. [Google Scholar] [CrossRef]
- Zhang, S.; Li, Z.; Liu, W.; Zhao, J.; Qin, T. Rank Selection Method of CP Decomposition Based on Deep Deterministic Policy Gradient Algorithm. IEEE Access 2024, 12, 97374–97385. [Google Scholar] [CrossRef]
- Liu, Y.; Ng, M.K. Deep neural network compression by Tucker decomposition with nonlinear response. Knowl.-Based Syst. 2022, 241, 108171. [Google Scholar] [CrossRef]
- Xu, L.; Cheng, L.; Wong, N.; Wu, Y.C. Tensor train factorization under noisy and incomplete data with automatic rank estimation. Pattern Recognit. 2023, 141, 109650. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Vaidya, S.; Ruehle, F.; Halverson, J.; Soljačić, M.; Hou, T.Y.; Tegmark, M. Kan: Kolmogorov-arnold networks. arXiv 2024, arXiv:2404.19756v4. [Google Scholar]
- Chang, X.-H.; Liu, Y. Robust H∞ Filtering for Vehicle Sideslip Angle With Quantization and Data Dropouts. IEEE Trans. Veh. Technol. 2020, 69, 10435–10445. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | 4.841 | 5.026 | 4.993 | 3.804 | 3.758 | 3.922 | 5.877 | 6.138 | 0.892 | 14.32 |
| FOPID | 4.573 | 4.704 | 4.429 | 3.545 | 3.179 | 2.834 | 5.192 | 5.336 | 0.691 | 15.88 |
| PINN (SGD) | 3.947 | 4.611 | 3.404 | 4.536 | 4.592 | 2.899 | 4.681 | 5.109 | 0.474 | 18.25 |
| PINN (Adam) | 3.690 | 4.252 | 2.983 | 2.508 | 2.459 | 1.643 | 4.189 | 4.919 | 0.263 | 19.04 |
| Proposed PINN (RLFGD) | 3.858 | 4.366 | 3.137 | 4.660 | 4.753 | 3.033 | 4.757 | 5.302 | 0.564 | 22.14 |
| Proposed PINN (CFGD) | 3.485 | 4.003 | 2.763 | 2.041 | 2.150 | 1.384 | 4.048 | 4.782 | 0.229 | 20.60 |
| Proposed PINN (GLFGD) | 3.205 | 3.796 | 2.411 | 1.790 | 1.842 | 1.099 | 3.894 | 4.467 | 0.192 | 21.89 |
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | 1.973 | 1.854 | 2.042 | 3.662 | 3.653 | 3.583 | 4.867 | 5.057 | 1.463 | 14.32 |
| FOPID | 1.774 | 1.662 | 1.950 | 3.114 | 2.948 | 3.434 | 4.492 | 4.804 | 1.297 | 15.88 |
| PINN (SGD) | 1.380 | 1.441 | 2.711 | 2.407 | 2.473 | 4.882 | 4.215 | 4.734 | 1.996 | 18.25 |
| PINN (Adam) | 1.354 | 1.399 | 2.376 | 1.942 | 2.030 | 4.493 | 4.189 | 4.704 | 1.944 | 19.04 |
| Proposed PINN (RLFGD) | 1.439 | 1.448 | 2.835 | 2.689 | 2.557 | 5.023 | 4.260 | 4.773 | 2.093 | 22.14 |
| Proposed PINN (CFGD) | 1.328 | 1.341 | 2.047 | 1.645 | 1.890 | 4.086 | 4.111 | 4.548 | 1.827 | 20.60 |
| Proposed PINN (GLFGD) | 1.288 | 1.305 | 2.049 | 1.268 | 1.643 | 3.918 | 4.033 | 4.286 | 1.636 | 21.89 |
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PINN (SGD) | 3.914 | 3.864 | 3.989 | 2.826 | 2.801 | 2.872 | 5.166 | 5.390 | 0.704 | 18.47 |
| PINN (Adam) | 3.862 | 3.982 | 4.011 | 2.704 | 2.680 | 2.923 | 5.111 | 5.462 | 0.644 | 18.94 |
| Proposed PINN (RLFGD) | 3.942 | 3.861 | 3.897 | 2.581 | 2.853 | 2.722 | 5.263 | 5.149 | 0.594 | 21.98 |
| Proposed PINN (CFGD) | 3.285 | 3.633 | 3.839 | 2.402 | 2.338 | 2.814 | 4.899 | 5.030 | 0.593 | 20.86 |
| Proposed PINN (GLFGD) | 3.091 | 3.302 | 3.466 | 2.185 | 2.120 | 2.449 | 4.848 | 4.835 | 0.603 | 22.05 |
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PINN (SGD) | 1.894 | 1.865 | 2.030 | 2.594 | 2.637 | 5.112 | 5.294 | 5.774 | 2.870 | 18.47 |
| PINN (Adam) | 1.757 | 1.745 | 1.930 | 2.654 | 2.576 | 4.943 | 5.202 | 5.628 | 2.744 | 18.94 |
| Proposed PINN (RLFGD) | 1.985 | 2.103 | 2.005 | 2.954 | 3.011 | 3.196 | 4.260 | 4.773 | 2.093 | 21.98 |
| Proposed PINN (CFGD) | 1.864 | 1.937 | 1.947 | 2.709 | 2.894 | 3.014 | 4.185 | 4.534 | 1.983 | 20.86 |
| Proposed PINN (GLFGD) | 1.880 | 1.805 | 1.949 | 2.768 | 2.643 | 2.918 | 4.033 | 4.286 | 1.636 | 22.05 |
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PINN (SGD) | 4.943 | 4.992 | 4.615 | 3.904 | 3.876 | 3.710 | 6.062 | 5.398 | 0.806 | 15.74 |
| PINN (Adam) | 4.736 | 4.822 | 4.443 | 3.632 | 3.702 | 3.540 | 5.922 | 5.214 | 0.694 | 16.29 |
| Proposed PINN (RLFGD) | 4.839 | 4.784 | 4.510 | 3.806 | 3.689 | 3.693 | 5.453 | 5.837 | 0.713 | 19.34 |
| Proposed PINN (CFGD) | 4.316 | 4.606 | 4.485 | 3.723 | 3.575 | 3.800 | 5.225 | 5.529 | 0.685 | 18.83 |
| Proposed PINN (GLFGD) | 4.262 | 4.498 | 4.421 | 3.620 | 3.288 | 3.562 | 5.274 | 5.459 | 0.686 | 19.07 |
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PINN (SGD) | 1.793 | 1.814 | 1.892 | 2.375 | 2.405 | 2.438 | 4.866 | 5.174 | 2.864 | 15.74 |
| PINN (Adam) | 1.565 | 1.595 | 1.699 | 2.103 | 2.284 | 2.273 | 4.637 | 4.940 | 2.545 | 16.29 |
| Proposed PINN (RLFGD) | 1.604 | 1.603 | 1.675 | 2.212 | 2.305 | 2.226 | 4.760 | 4.773 | 2.651 | 19.34 |
| Proposed PINN (CFGD) | 1.546 | 1.498 | 1.509 | 2.109 | 2.138 | 2.189 | 4.685 | 4.534 | 2.483 | 18.83 |
| Proposed PINN (GLFGD) | 1.527 | 1.464 | 1.534 | 2.072 | 2.173 | 2.114 | 4.584 | 4.492 | 2.336 | 19.07 |
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PINN (SGD) | 5.946 | 5.893 | 5.684 | 4.042 | 3.935 | 4.147 | 6.236 | 6.272 | 1.101 | 13.46 |
| PINN (Adam) | 5.662 | 5.482 | 5.311 | 3.704 | 3.680 | 3.923 | 5.863 | 5.980 | 0.821 | 13.80 |
| Proposed PINN (RLFGD) | 5.539 | 5.013 | 4.802 | 3.881 | 3.799 | 3.994 | 5.894 | 5.849 | 0.836 | 14.72 |
| Proposed PINN (CFGD) | 5.276 | 5.608 | 5.548 | 3.463 | 3.498 | 3.814 | 5.682 | 5.530 | 0.704 | 14.19 |
| Proposed PINN (GLFGD) | 5.681 | 5.302 | 5.466 | 3.385 | 3.520 | 3.449 | 5.529 | 5.539 | 0.683 | 14.89 |
| Model | MAE | MSE | ISE | Time, s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PINN (SGD) | 1.725 | 1.843 | 1.797 | 2.357 | 2.542 | 2.512 | 4.483 | 4.620 | 2.347 | 13.46 |
| PINN (Adam) | 1.968 | 1.997 | 1.964 | 2.583 | 2.744 | 2.803 | 4.602 | 4.726 | 2.595 | 13.80 |
| Proposed PINN (RLFGD) | 1.823 | 1.941 | 1.805 | 2.554 | 2.413 | 2.583 | 4.594 | 4.803 | 1.943 | 14.72 |
| Proposed PINN (CFGD) | 1.628 | 1.694 | 1.707 | 2.239 | 2.339 | 2.376 | 4.375 | 4.510 | 1.849 | 14.19 |
| Proposed PINN (GLFGD) | 1.618 | 1.643 | 1.639 | 2.220 | 2.386 | 2.324 | 4.203 | 4.357 | 1.522 | 14.89 |
| Method | Year | Key Idea |
|---|---|---|
| PID [6] | 2009 | Summation of proportional, integral, and derivative of error. |
| Adaptive PID [36] | 2013 | Adaptive gains and robustifying adaptive terms. |
| Fractional PID [37] | 2015 | Fractional-order integral and derivative of error. |
| LQG [8] | 2019 | Linearization of the nonlinear control model. |
| LQR [9] | 2020 | Optimal control, where a quadratic cost function is minimized. |
| PINN [38] | 2024 | Self-learning approach with automatic differentiation. |
| Proposed PINN with FGD | 2024 | Fractional optimization of loss function. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdulkadirov, R.; Lyakhov, P.; Butusov, D.; Nagornov, N.; Kalita, D. Physics-Aware Machine Learning Approach for High-Precision Quadcopter Dynamics Modeling. Drones 2025, 9, 187. https://doi.org/10.3390/drones9030187
Abdulkadirov R, Lyakhov P, Butusov D, Nagornov N, Kalita D. Physics-Aware Machine Learning Approach for High-Precision Quadcopter Dynamics Modeling. Drones. 2025; 9(3):187. https://doi.org/10.3390/drones9030187
Chicago/Turabian StyleAbdulkadirov, Ruslan, Pavel Lyakhov, Denis Butusov, Nikolay Nagornov, and Diana Kalita. 2025. "Physics-Aware Machine Learning Approach for High-Precision Quadcopter Dynamics Modeling" Drones 9, no. 3: 187. https://doi.org/10.3390/drones9030187
APA StyleAbdulkadirov, R., Lyakhov, P., Butusov, D., Nagornov, N., & Kalita, D. (2025). Physics-Aware Machine Learning Approach for High-Precision Quadcopter Dynamics Modeling. Drones, 9(3), 187. https://doi.org/10.3390/drones9030187