
Drone-Based Environmental Emergency Response in the Brazilian Amazon


Abstract
1. Introduction
2. Related Work
Contributions
3. Proposed Model
- Where to open drone facilities given a set of potential locations?
- How many operators are needed in each location?
- How many drones of each type are needed in each location?
- Which drones should be assigned to each location–emergency type pair?
- What type of facility to open in each location?
- How many backup batteries are needed in each facility for each drone type?
- What portion of the demand for a given emergency will be covered by each drone?
3.1. Notation
3.1.1. Sets
- I
- Set of locations of environmental emergencies.
- J
- Set of candidate drone bases.
- K
- Set of drone types.
- E
- Set of type of environmental emergencies.
- W
- Set of types of facilities.
- L
- Set of links defining the catchment regions, type of incident per location, and drone requirements, where .
3.1.2. Parameters
- dij
- Distance between drone base and incident , determined using Haversine distances.
- λie
- Demand for emergency in site .
- ck
- Annualized acquisition cost of drone (USD/year).
- vk
- Flight speed of drone (m/s).
- ωk
- Effective flying time for drone (s).
- rk
- Coverage radius of drone (m).
- τe
- On-scene/mission time for emergency (s).
- Annual cost of opening a drone base w in location j (USD/year).
- ϕk
- Maximum number of batteries allowed for drone type k (USD/year).
- Annualized cost of battery for drone type k (USD/year).
- Nw
- Maximum number of drones per facility type w.
- M
- Maximum number of drones per operator.
- s
- Annual salary for drone operators (first responders) (USD/year).
3.1.3. Decision Variables
- njk
- Integer variable representing the number of drones of type k allocated to facility .
- bjk
- Integer variable representing the number of batteries for drone type k allocated to facility .
- oj
- Integer variable representing the number of operators needed in facility j, assuming that each one can operate M drones at a time.
- Binary variable that takes value 1 if facility type w is opened on location j.
- yj
- Binary variable that takes value 1 if facility is opened, and 0 otherwise.
- xijke
- Binary variable that takes value 1 if emergency in site is covered by base and drone , and 0 otherwise.
- αijke
- Continuous variable representing the portion of the demand for emergency in site is covered by base and drone .
3.2. Drone-Based Facility Location–Allocation Model
4. Case Study
4.1. Study Settings
4.2. Demand Data
4.2.1. Satellite Imagery
4.2.2. Whistle-Blower Data
4.2.3. Environmental Emergencies Incidence Rate
4.3. Candidate Base Stations
4.4. Drone Specifications
Drone Deployment
- An environmental emergency takes place.
- Environmental protection agents receive an alert of an environmental emergency from real-time monitoring systems, whistle-blowers, or bystanders.
- The drone is prepared for the flight. The period between the call arrival and the dispatch of the drone is the dispatch time.
- Drones are deployed from the launch station to the scene of the incident. The period between the dispatch until arrival at the scene is the flight time.
- The drone remains on scene to gather information about the incident (on-scene time).
- The drone flies back to the base station.
- Upon arrival, the drone must be reset and prepared for a new flight. The time to prepare the drone for a new flight after it returns from a mission is the reset time.
4.5. Facility and Operator Cost
5. Results
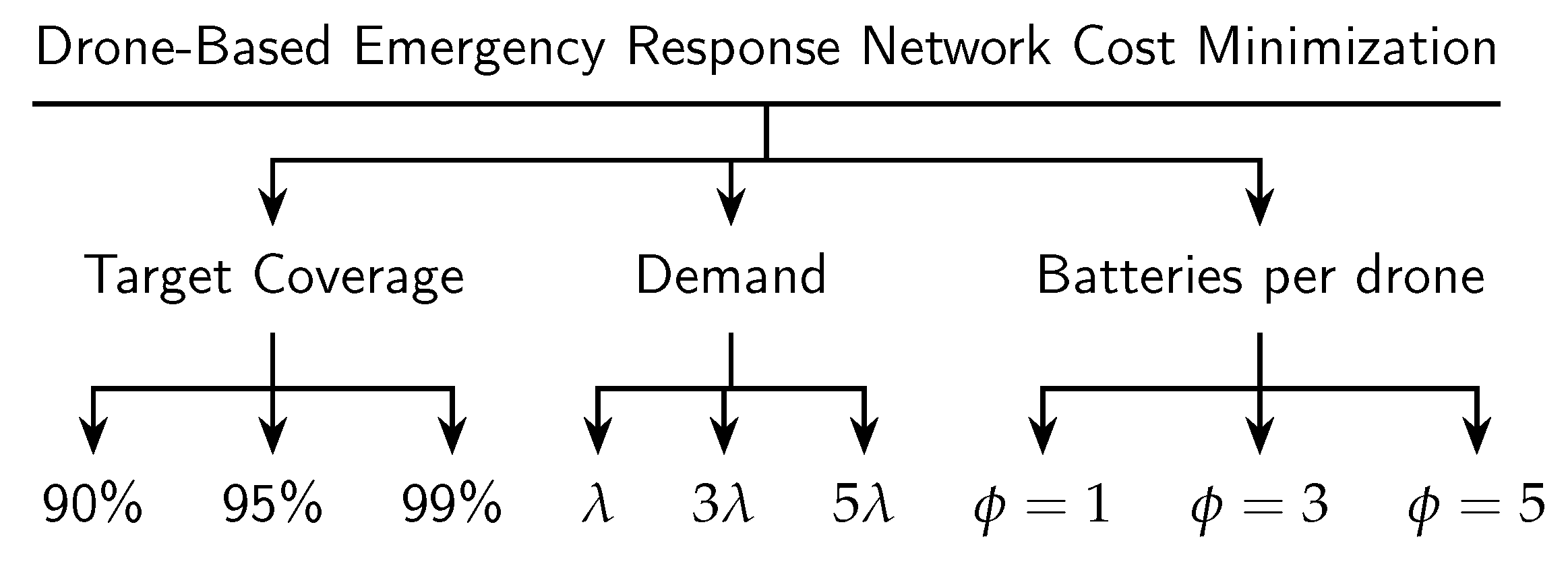
5.1. Scenarios
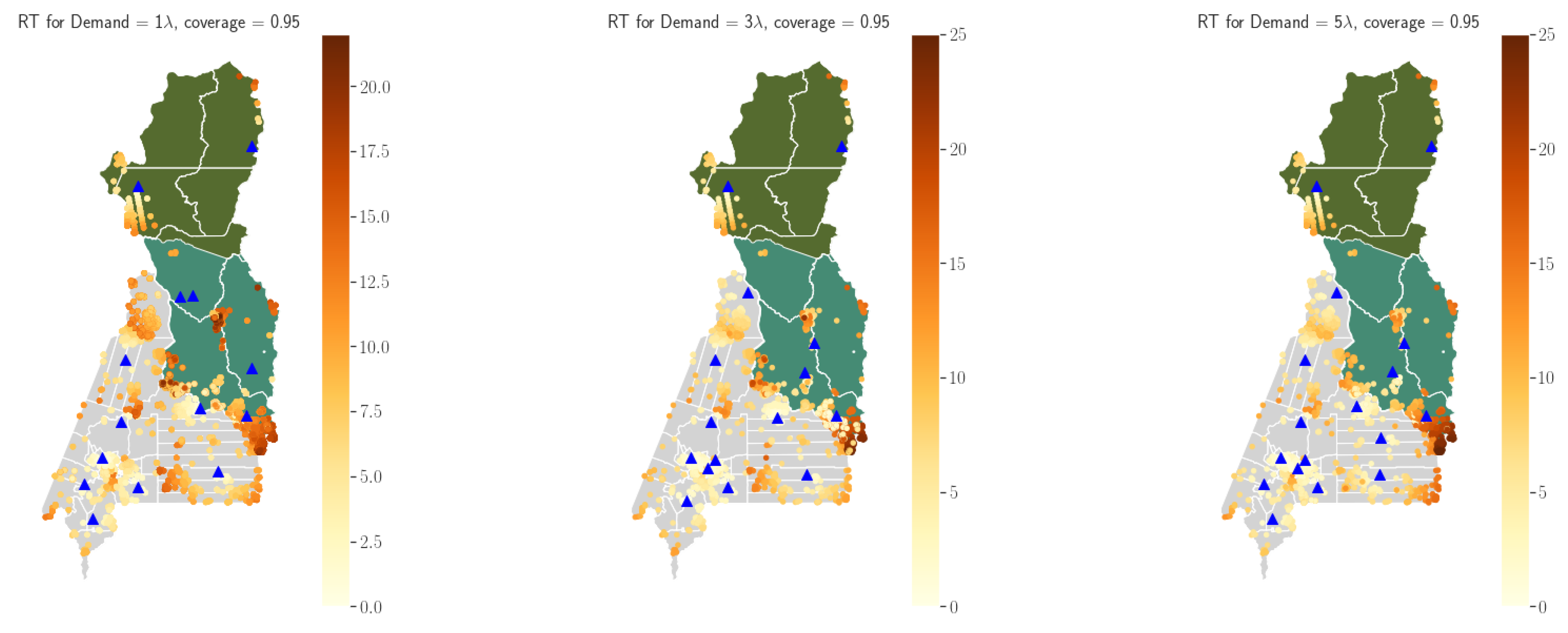
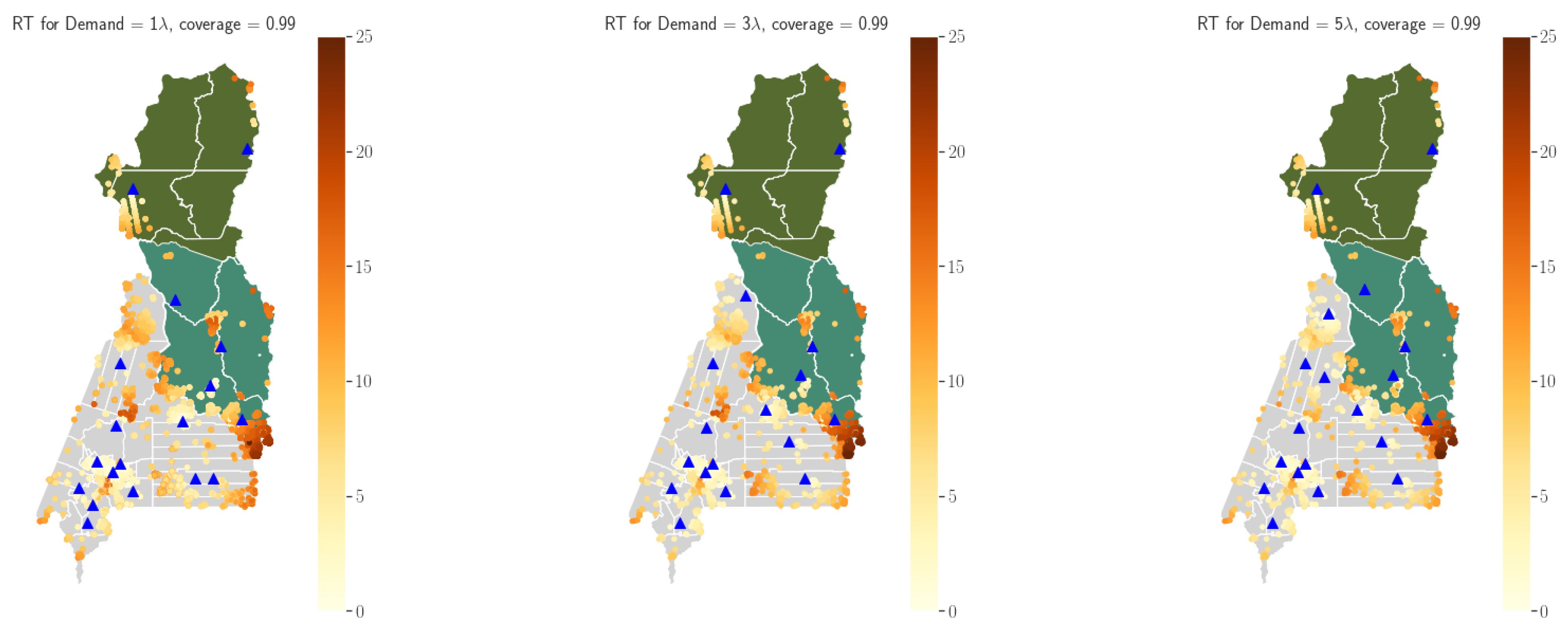
- Assuming that the number of incidents in each census block group follows a Poisson distribution with rate , the impact of varying the incidence rate is studied. In the base case (demand scenario 1), it is assumed that for each census block group the average incidence rate is equal to the observed values for the 2020 and 2021 dry seasons. Additional incidence rates of 3 (demand scenario 3) and (demand scenario 5) are considered for each census block group. The network configuration is then estimated when under the three target coverage objectives.
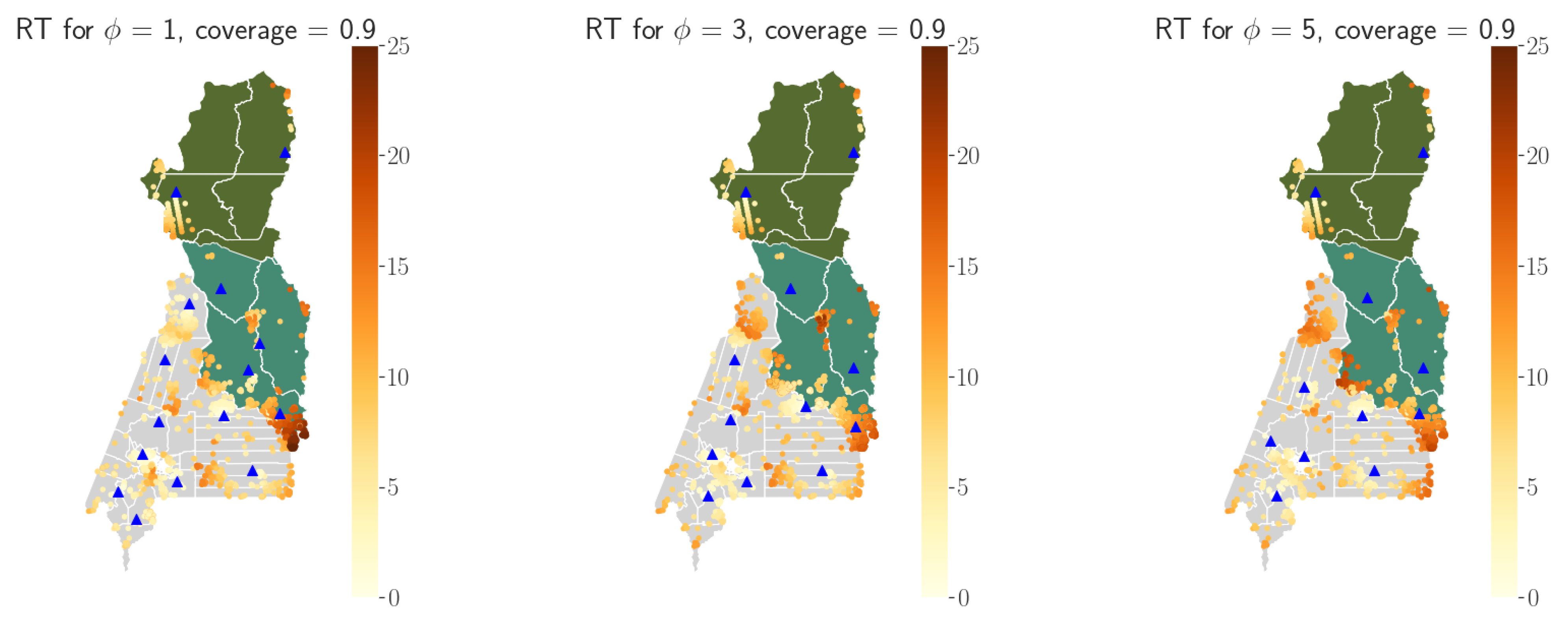
- To understand the impact of the battery capacity per drone, it is assumed that the demand is equal to the average observed () and three target coverage objectives are considered, with different limits on the number of batteries allowed per drone. Considering the additional batteries explicitly is important because drones can take about 60–90 min to recharge, so simply assuming that a drone is ready to fly when called is not sufficient, given the downtime associated with recharging the batteries.
5.1.1. Impact of Varying the Maximum Backup Battery
5.1.2. Impact of Varying the Incidence Rate
5.2. Key Findings and Implications for Practical Implementation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zemp, D.; Schleussner, C.F.; Barbosa, H.; Rammig, A. Deforestation effects on Amazon forest resilience. Geophys. Res. Lett. 2017, 44, 6182–6190. [Google Scholar]
- Junior, C.H.S.; Pessôa, A.C.; Carvalho, N.S.; Reis, J.B.; Anderson, L.O.; Aragão, L.E. The Brazilian Amazon deforestation rate in 2020 is the greatest of the decade. Nat. Ecol. Evol. 2021, 5, 144–145. [Google Scholar]
- Albuquerque, I.; Alencar, A.; Angelo, C.; Azevedo, T.; Barcellos, F.; Coluna, I.; Junior, C.C.; Cremer, M.; Piatto, M.; Potenza, R.; et al. Análise Das Emissões Brasileiras de Gases de Efeito Estufa e Suas Implicações para as Metas do Clima do BRASIL 1970–2019; Technical Report; Observatório do Clima: Brasília, Brazil, 2020. [Google Scholar]
- Hosonuma, N.; Herold, M.; De Sy, V.; De Fries, R.S.; Brockhaus, M.; Verchot, L.; Angelsen, A.; Romijn, E. An assessment of deforestation and forest degradation drivers in developing countries. Environ. Res. Lett. 2012, 7, 044009. [Google Scholar]
- van Solinge, T.B. Deforestation crimes and conflicts in the Amazon. Crit. Criminol. 2010, 18, 263–277. [Google Scholar]
- Soares-Filho, B.; Moutinho, P.; Nepstad, D.; Anderson, A.; Rodrigues, H.; Garcia, R.; Dietzsch, L.; Merry, F.; Bowman, M.; Hissa, L.; et al. Role of Brazilian Amazon protected areas in climate change mitigation. Proc. Natl. Acad. Sci. USA 2010, 107, 10821–10826. [Google Scholar]
- USAID. Climate Risk Profile: Brazil; Technical Report; United States Agency for International Development: Washington, DC, USA, 2020. [Google Scholar]
- Intended Nationally Determined Contribution Towards Achieving The Objective of the United Nations Framework Convention on Climate Change; United Nations Framework Conventional on Climatic Change: Rio de Janeiro, Brazil, 2015.
- Piotrowski, M. Nearing the Tipping Point: Drivers of Deforestation in the Amazon Region; Inter-American Dialogue: Washington, DC, USA, 2019. [Google Scholar]
- Kröger, M. Deforestation, cattle capitalism and neodevelopmentalism in the Chico Mendes Extractive Reserve, Brazil. J. Peasant. Stud. 2020, 47, 464–482. [Google Scholar]
- Ostendorf, B.; Hilbert, D.W.; Hopkins, M.S. The effect of climate change on tropical rainforest vegetation pattern. Ecol. Model. 2001, 145, 211–224. [Google Scholar]
- Covey, K.; Soper, F.; Pangala, S.; Bernardino, A.; Pagliaro, Z.; Basso, L.; Cassol, H.; Fearnside, P.; Navarrete, D.; Novoa, S.; et al. Carbon and Beyond: The Biogeochemistry of Climate in a Rapidly Changing Amazon. Front. For. Glob. Chang. 2021, 4, 11. [Google Scholar] [CrossRef]
- Malhi, Y.; Roberts, J.T.; Betts, R.A.; Killeen, T.J.; Li, W.; Nobre, C.A. Climate change, deforestation, and the fate of the Amazon. Science 2008, 319, 169–172. [Google Scholar]
- Laurance, W.F.; Williamson, G.B. Positive feedbacks among forest fragmentation, drought, and climate change in the Amazon. Conserv. Biol. 2001, 15, 1529–1535. [Google Scholar]
- Lovejoy, T.E.; Nobre, C. Amazon Tipping Point. Sci. Adv. 2018, 4, 2340. [Google Scholar] [CrossRef]
- Fearnside, P.M. Brazil’s Amazon forest in mitigating global warming: Unresolved controversies. Clim. Policy 2012, 12, 70–81. [Google Scholar] [CrossRef]
- Sherstjuk, V.; Zharikova, M.; Sokol, I. Forest fire-fighting monitoring system based on UAV team and remote sensing. In Proceedings of the 38th IEEE International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 24–26 April 2018; pp. 663–668. [Google Scholar] [CrossRef]
- Ellwanger, J.H.; Kulmann-Leal, B.; Kaminski, V.L.; Valverde-Villegas, J.; Veiga, A.B.G.; Spilki, F.R.; Fearnside, P.M.; Caesar, L.; Giatti, L.L.; Wallau, G.L.; et al. Beyond diversity loss and climate change: Impacts of Amazon deforestation on infectious diseases and public health. An. da Acad. Bras. de Ciências 2020, 92, 1–33. [Google Scholar]
- Machado-Silva, F.; Libonati, R.; de Lima, T.F.M.; Peixoto, R.B.; de Almeida Franca, J.R.; Magalhães, M.d.A.F.M.; Santos, F.L.M.; Rodrigues, J.A.; DaCamara, C.C. Drought and fires influence the respiratory diseases hospitalizations in the Amazon. Ecol. Indic. 2020, 109, 105817. [Google Scholar]
- Nawaz, M.; Henze, D. Premature deaths in Brazil associated with long-term exposure to PM2. 5 from Amazon fires between 2016 and 2019. GeoHealth 2020, 4, e2020GH000268. [Google Scholar] [PubMed]
- Barcellos, C.; Xavier, D.; Hacon, S.; Artaxo, P.; Magalhães, M.; Matos, V.; Monteiro, A.M.; Feitosa, P. Queimadas na Amazônia e Seus Impactos na Saúde: A Incidência de Doenças Respiratórias no Sul Da Amazônia Aumentou; Fundação Oswaldo Cruz (Fiocruz): Rio de Janeiro, Brazil, 2019. [Google Scholar]
- Cano-Crespo, A.; Oliveira, P.J.; Boit, A.; Cardoso, M.; Thonicke, K. Forest edge burning in the Brazilian Amazon promoted by escaping fires from managed pastures. J. Geophys. Res. Biogeosci. 2015, 120, 2095–2107. [Google Scholar]
- Börner, J.; Kis-Katos, K.; Hargrave, J.; König, K. Post-crackdown effectiveness of field-based forest law enforcement in the Brazilian Amazon. PLoS ONE 2015, 10, e0121544. [Google Scholar]
- Carvalho, W.D.; Mustin, K.; Hilário, R.R.; Vasconcelos, I.M.; Eilers, V.; Fearnside, P.M. Deforestation control in the Brazilian Amazon: A conservation struggle being lost as agreements and regulations are subverted and bypassed. Perspect. Ecol. Conserv. 2019, 17, 122–130. [Google Scholar]
- Assunção, J.; Gandour, C.; Rocha, R. DETERring Deforestation in the Amazon: Environmental Monitoring and Law Enforcement; Climate Policy Initiative, Núcleo de Avaliaçao de Políticas Climáticas, Pontifica Universidade Católica (PUC): Rio de Janeiro, Brazil, 2017; p. 36. [Google Scholar]
- Cardil, A.; De-Miguel, S.; Silva, C.A.; Reich, P.B.; Calkin, D.; Brancalion, P.H.; Vibrans, A.C.; Gamarra, J.G.; Zhou, M.; Pijanowski, B.C.; et al. Recent deforestation drove the spike in Amazonian fires. Environ. Res. Lett. 2020, 15, 121003. [Google Scholar]
- Bustamante, M.M.; Nobre, C.A.; Smeraldi, R.; Aguiar, A.P.; Barioni, L.G.; Ferreira, L.G.; Longo, K.; May, P.; Pinto, A.S.; Ometto, J.P. Estimating greenhouse gas emissions from cattle raising in Brazil. Clim. Chang. 2012, 115, 559–577. [Google Scholar]
- Vargas-Ramírez, N.; Paneque-Gálvez, J. The global emergence of community drones (2012–2017). Drones 2019, 3, 76. [Google Scholar] [CrossRef]
- Finer, M.; Castañeda, C.; Novoa, S.; Paz, L. MAAP #126: Drones and Legal Action in the Peruvian Amazon; Amazon Conservation Association: Washington, DC, USA, 2016. [Google Scholar]
- Weisse, M.; Nogueron, R. Indigenous Communities Fend Off Invaders in the Peruvian Amazon; World Resources Institute: Washington, DC, USA, 2017. [Google Scholar]
- Teixeira, F. Flying High: Brazilian Tribe Keeps Watch over Forest with Drones; Reuters: New York, NY, USA, 2020. [Google Scholar]
- Nunes, T.J. Aplicação da Tecnologia Através de Drones no Corpo de Bombeiros Militar de Santa Catarina; Universidade Federal de Santa Catarina: Florianópolis, Brazil, 2017. [Google Scholar]
- Salles, E.B.C. A Incorporação de Drones Para Vigilância de Espaços Urbanos Brasileiros: O Uso Pelas Forças Armadas E Órgãos de Segurança Pública da União E Do Estado De Santa Catarina. Rev. Direito Governança Novas Tecnol. 2018, 4, 83–103. [Google Scholar] [CrossRef]
- Perazzoni, F. Amazonia, organized crime and illegal deforestation: Best practices for the protection of the Brazilian Amazon. In The 21st Century Fight for the Amazon; Springer: Berlin/Heidelberg, Germany, 2018; pp. 21–55. [Google Scholar]
- Pulver, A.; Wei, R.; Mann, C. Locating AED enabled medical drones to enhance cardiac arrest response times. Prehospital Emerg. Care 2016, 20, 378–389. [Google Scholar] [CrossRef]
- Pulver, A.; Wei, R. Optimizing the spatial location of medical drones. Appl. Geogr. 2018, 90, 9–16. [Google Scholar] [CrossRef]
- Ilkhanizadeh, S.; Golabi, M.; Hesami, S.; Rjoub, H. The Potential Use of Drones for Tourism in Crises: A Facility Location Analysis Perspective. J. Risk Financ. Manag. 2020, 13, 246. [Google Scholar] [CrossRef]
- Skorput, P.; Mandzuka, S.; Vojvodic, H. The use of Unmanned Aerial Vehicles for forest fire monitoring. In Proceedings of the 2016 IEEE International Symposium ELMAR, Zadar, Croatia, 12–14 September 2016; pp. 93–96. [Google Scholar] [CrossRef]
- Akhloufi, M.A.; Castro, N.A.; Couturier, A. UAVs for wildland fires. In Proceedings of the Autonomous Systems: Sensors, Vehicles, Security, and the Internet of Everything, International Society for Optics and Photonics, Orlando, FL, USA, 16–18 April 2018; Volume 10643, p. 106430M. [Google Scholar]
- Morello, T.F.; Ramos, R.M.; Anderson, L.O.; Owen, N.; Rosan, T.M.; Steil, L. Predicting fires for policy making: Improving accuracy of fire brigade allocation in the Brazilian Amazon. Ecol. Econ. 2020, 169, 106501. [Google Scholar] [CrossRef]
- Martínez-de Dios, J.R.; Merino, L.; Ollero, A.; Ribeiro, L.M.; Viegas, X. Multi-UAV Experiments: Application to Forest Fires. In Multiple Heterogeneous Unmanned Aerial Vehicles; Ollero, A., Maza, I., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 207–228. [Google Scholar] [CrossRef]
- Akhloufi, M.A.; Castro, N.A.; Couturier, A. Unmanned Aerial Systems for Wildland and Forest Fires: Sensing, Perception, Cooperation and Assistance. Drones 2021, 5, 15. [Google Scholar] [CrossRef]
- Afghah, F.; Razi, A.; Chakareski, J.; Ashdown, J. Wildfire Monitoring in Remote Areas using Autonomous Unmanned Aerial Vehicles. In Proceedings of the IEEE INFOCOM 2019—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 835–840. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Ivošević, B.; Han, Y.G.; Cho, Y.; Kwon, O. The use of conservation drones in ecology and wildlife research. J. Ecol. Environ. 2015, 38, 113–118. [Google Scholar] [CrossRef]
- Wich, S.A.; Koh, L.P. Conservation Drones: Mapping and Monitoring Biodiversity; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Caballero, L.C.; Saito, C.; Micheline, R.B.; Paredes, J.A. On the design of an UAV-based store and forward transport network for wildlife inventory in the western Amazon rainforest. In Proceedings of the 2017 IEEE XXIV International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Cusco, Peru, 15–18 August 2017; pp. 1–4. [Google Scholar]
- Simoes, D.; Rodrigues, A.; Reis, A.B.; Sargento, S. Forest Fire Monitoring Through a Network of Aerial Drones and Sensors. In Proceedings of the 2020 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Austin, TX, USA, 23–27 March 2020; pp. 1–6. [Google Scholar]
- Cooper, L. Location-allocation problems. Oper. Res. 1963, 11, 331–343. [Google Scholar] [CrossRef]
- Daskin, M.S. What you should know about location modeling. Nav. Res. Logist. (NRL) 2008, 55, 283–294. [Google Scholar] [CrossRef]
- Berie, H.T.; Burud, I. Application of unmanned aerial vehicles in earth resources monitoring: Focus on evaluating potentials for forest monitoring in Ethiopia. Eur. J. Remote Sens. 2018, 51, 326–335. [Google Scholar] [CrossRef]
- Jiménez López, J.; Mulero-Pázmány, M. Drones for conservation in protected areas: Present and future. Drones 2019, 3, 10. [Google Scholar] [CrossRef]
- Martínez-de Dios, J.R.; Merino, L.; Caballero, F.; Ollero, A. Automatic forest-fire measuring using ground stations and unmanned aerial systems. Sensors 2011, 11, 6328–6353. [Google Scholar] [CrossRef]
- Dang-Ngoc, H.; Nguyen-Trung, H. Evaluation of Forest Fire Detection Model using Video captured by UAVs. In Proceedings of the 19th IEEE International Symposium on Communications and Information Technologies (ISCIT), Ho Chi Minh City, Vietnam, 25–27 September 2019; pp. 513–518. [Google Scholar] [CrossRef]
- Wing, M.G.; Burnett, J.D.; Sessions, J. Remote sensing and unmanned aerial system technology for monitoring and quantifying forest fire impacts. Int. J. Remote Sens. Appl. 2014, 4, 18–35. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Martínez-de Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Ferreira, P.R.; Boffo, F.S.; Bazzan, A.L. Using Swarm-GAP for distributed task allocation in complex scenarios. In Proceedings of the Massively Multi-Agent Technology: AAMAS Workshops, MMAS 2006, LSMAS 2006, and CCMMS 2007, Hakodate, Japan, 9 May 2006; Honolulu, HI, USA, 15 May 2007; Selected and Revised Papers 6. Springer: Berlin/Heidelberg, Germany, 2008; pp. 107–121. [Google Scholar]
- Alfeo, A.L.; Cimino, M.G.; Vaglini, G. Enhancing biologically inspired swarm behavior: Metaheuristics to foster the optimization of UAVs coordination in target search. Comput. Oper. Res. 2019, 110, 34–47. [Google Scholar] [CrossRef]
- Majd, A.; Ashraf, A.; Troubitsyna, E.; Daneshtalab, M. Integrating learning, optimization, and prediction for efficient navigation of swarms of drones. In Proceedings of the 26th IEEE Euromicro International Conference on Parallel, Distributed and Network-based Processing (PDP), Cambridge, UK, 21–23 March 2018; pp. 101–108. [Google Scholar]
- De Masi, G.; Ferrante, E. Quality-dependent adaptation in a swarm of drones for environmental monitoring. In Proceedings of the 2020 IEEE Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 4 February–9 April 2020; pp. 1–6. [Google Scholar]
- Schwarzrock, J.; Zacarias, I.; Bazzan, A.L.; de Araujo Fernandes, R.Q.; Moreira, L.H.; de Freitas, E.P. Solving task allocation problem in multi unmanned aerial vehicles systems using swarm intelligence. Eng. Appl. Artif. Intell. 2018, 72, 10–20. [Google Scholar] [CrossRef]
- Boutilier, J.J.; Brooks, S.C.; Janmohamed, A.; Byers, A.; Buick, J.E.; Zhan, C.; Schoellig, A.P.; Cheskes, S.; Morrison, L.J.; Chan, T.C. Optimizing a drone network to deliver automated external defibrillators. Circulation 2017, 135, 2454–2465. [Google Scholar] [CrossRef]
- Chauhan, D.; Unnikrishnan, A.; Figliozzi, M. Maximum coverage capacitated facility location problem with range constrained drones. Transp. Res. Part C Emerg. Technol. 2019, 99, 1–18. [Google Scholar] [CrossRef]
- Murray, A.T.; Tong, D. Coverage optimization in continuous space facility siting. Int. J. Geogr. Inf. Sci. 2007, 21, 757–776. [Google Scholar] [CrossRef]
- Murray, A.T. Geography in coverage modeling: Exploiting spatial structure to address complementary partial service of areas. Ann. Assoc. Am. Geogr. 2005, 95, 761–772. [Google Scholar] [CrossRef]
- Carlo, H.J.; Aldarondo, F.; Saavedra, P.M.; Torres, S.N. Capacitated continuous facility location problem with unknown number of facilities. Eng. Manag. J. 2012, 24, 24–31. [Google Scholar] [CrossRef]
- Plastria, F. Continuous location problems: Research, results and questions. In Facility Location: A Survey of Applications and Methods; Springer: Berlin/Heidelberg, Germany, 1995; pp. 85–127. [Google Scholar]
- ICMBio. Plano de Manejo da Reserva Biológica do Jaru; Instituto Chico Mendes de Conservação da Biodiversidade: Brasília, Brazil, 2010. [Google Scholar]
- Rudke, A.; Brito, A.; Carreira, J.; Bezerra, R.; Santos, A. Análise multitemporal da cobertura vegetal na reserva biológica do Jaru e zona de amortecimento, Rondônia. In Proceedings of the Anais XVI Simpósio Brasileiro De Sensoriamento Remoto-SBSR, Foz do Iguaçu, Brasil, 13–18 April 2013; pp. 1564–1570. [Google Scholar]
- IDESAM. Boletim do Desmatamento—Corredor Tupi-Mondé (RO/MT); Instituto de Conservação e Desenvolvimento Sustentável da Amazônia: Manaus, Brazil, 2018. [Google Scholar]
- Pfeifer, L.F.M.; Salman, A.K.D.; Taborda, J.M.M.; da Silva, G.M.; Andrade, J.S.; de Araujo, L.; de Souza, V.L.; Teixeira, O.d.S. Caracterização da pecuária em Rondônia. In Avanços da Pecuária na Amazônia: Pesquisas em Desenvolvimento Regional em RONDônia; Salman, A.K.D., Schlindwein, J.A., Pfeifer, L.F.M., Eds.; EDUFRO: Porto Velho, Brazil, 2021. [Google Scholar]
- Butt, N.; De Oliveira, P.A.; Costa, M.H. Evidence that deforestation affects the onset of the rainy season in Rondônia, Brazil. J. Geophys. Res. Atmos. 2011, 116, 15174. [Google Scholar] [CrossRef]
- ALVES, F.S.M.; FISCH, G.; VENDRAME, Í.F. Modificações do microclima e regime hidrológico devido ao desmatamento na Amazônia: Estudo de um caso em Rondônia (RO), Brasil. Acta Amaz. 1999, 29, 395. [Google Scholar] [CrossRef]
- Andrade Filho, V.S.d.; Artaxo Netto, P.E.; Hacon, S.d.S.; Carmo, C.N.d. Distribuição espacial de queimadas e mortalidade em idosos em região da Amazônia Brasileira, 2001–2012. Rev. Ciênc. Saúde Coletiva 2017, 22, 245–253. [Google Scholar] [CrossRef]
- Silva, L.B.; de Souza Mendes, D.F.; da Silva, R.M.P. Impactos da Poluição das Queimadas à Saúde Humana: Internações por Doenças Respiratórias no Estado de Rondônia entre 2009 e 2018. Rev. Multidiscip. Psicol. 2020, 14, 414–427. [Google Scholar]
- Rodrigues, P.C.d.O.; Ignotti, E.; Hacon, S.d.S. Distribuição espaço-temporal das queimadas e internações por doenças respiratórias em menores de cinco anos de idade em Rondônia, 2001 a 2010. Epidemiol. Serv. Saúde 2013, 22, 455–464. [Google Scholar] [CrossRef]
- Armenteras, D.; González, T.M.; Retana, J. Forest fragmentation and edge influence on fire occurrence and intensity under different management types in Amazon forests. Biol. Conserv. 2013, 159, 73–79. [Google Scholar] [CrossRef]
- Diniz, C.G.; de Almeida Souza, A.A.; Santos, D.C.; Dias, M.C.; da Luz, N.C.; de Moraes, D.R.V.; Maia, J.S.; Gomes, A.R.; da Silva Narvaes, I.; Valeriano, D.M.; et al. DETER-B: The new Amazon near real-time deforestation detection system. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2015, 8, 3619–3628. [Google Scholar] [CrossRef]
- INPE. Terrabrasilis—Downloads. Available online: http://terrabrasilis.dpi.inpe.br/downloads/ (accessed on 1 September 2021).
- Shimabukuro, Y.E.; dos Santos, J.R.; Formaggio, A.R.; Duarte, V.; Rudorff, B.F.T. The Brazilian Amazon monitoring program: PRODES and DETER projects. In Global Forest Monitoring from Earth Observation; Francis: Abingdon, UK, 2012; Achard, F., Hansen, M.C., Eds.; Taylor & Francis: Abingdon, UK, 2012; pp. 153–169. [Google Scholar]
- DGI. Perguntas Frequentes—Programa Queimadas. Available online: https://queimadas.dgi.inpe.br/queimadas/portal/informacoes/perguntas-frequentes (accessed on 10 January 2022).
- DGI. BDQueimadas—Programa Queimadas—INPE. Available online: https://queimadas.dgi.inpe.br/queimadas/bdqueimadas/ (accessed on 23 October 2021).
- Decreto no. 10.341, de 6 de Maio de 2020; Câmara dos Deputados: Brasília, Brazil, 2020.
- Decreto no. 10.394, de 10 de Junho de 2020; Câmara dos Deputados: Brasília, Brazil, 2020.
- Aplicativo Guardiões da Amazônia Recebe Denúncias de Crimes Ambientais. Available online: https://www.gov.br/pt-br/noticias/meio-ambiente-e-clima/2020/07/aplicativo-guardioes-da-amazonia-recebe-denuncias-de-crimes-ambientais (accessed on 15 September 2020).
- Custodio, J.E.; Lejeune, M.A. Spatiotemporal Data Set for Out-of-Hospital Cardiac Arrests. INFORMS J. Comput. 2021, 34, 669. [Google Scholar] [CrossRef]
- Boubeta, M.; Lombardía, M.J.; Marey-Pérez, M.; Morales, D. Poisson mixed models for predicting number of fires. Int. J. Wildland Fire 2019, 28, 237–253. [Google Scholar] [CrossRef]
- Podur, J.J.; Martell, D.L.; Stanford, D. A compound Poisson model for the annual area burned by forest fires in the province of Ontario. Environmetrics 2010, 21, 457–469. [Google Scholar] [CrossRef]
- ANAC. Orientações para Usuários de Drones; Agência Nacional de Aviação Civil: São José dos Campos, Brazil, 2017. [Google Scholar]
- ANAC. ANAC Autoriza Drone Com Capacidade Para Voar Distâncias De Até 30 km; Agência Nacional de Aviação Civil: São José dos Campos, Brazil, 2020. [Google Scholar]
- Asner, G.P.; Kellner, J.R.; Kennedy-Bowdoin, T.; Knapp, D.E.; Anderson, C.; Martin, R.E. Forest canopy gap distributions in the southern Peruvian Amazon. PLoS ONE 2013, 8, e60875. [Google Scholar] [CrossRef]
- UAV Systems International. Available online: https://uavsystemsinternational.com/ (accessed on 5 January 2022).
- DSLRPros. Available online: https://www.dslrpros.com/ (accessed on 5 January 2022).
- DJI Store. Available online: https://store.dji.com/ (accessed on 5 January 2022).
- CBMRO. EDITAL No 1/2021/CBM-CP; Corpo de Bombeiros Militar—CBM: Rondônia, Brazil, 2021. [Google Scholar]
- Silva, J.H.d. Análise Comparativa do Valor do Metro Quadrado dos Imóveis, Entre os Municípios de Cacoal, Ji-Paraná e Vilhena, no Estado de Rondônia; Universidade Federal de Rondônia: Cacoal, Brazil, 2014. [Google Scholar]
- SINDUSCON-RO. Custos Unitários Básicos de Construção. Available online: http://sindusconro.com.br/home/?wpfb_dl=450 (accessed on 9 September 2022).
- Zhu, T.; Boyles, S.D.; Unnikrishnan, A. Two-stage robust facility location problem with drones. Transp. Res. Part C Emerg. Technol. 2022, 137, 103563. [Google Scholar] [CrossRef]
- Chauhan, D.R.; Unnikrishnan, A.; Figliozzi, M.; Boyles, S.D. Robust maximum coverage facility location problem with drones considering uncertainties in battery availability and consumption. Transp. Res. Rec. 2021, 2675, 25–39. [Google Scholar] [CrossRef]
- Shavarani, S.M.; Mosallaeipour, S.; Golabi, M.; İzbirak, G. A congested capacitated multi-level fuzzy facility location problem: An efficient drone delivery system. Comput. Oper. Res. 2019, 108, 57–68. [Google Scholar] [CrossRef]
- Al-Rabiaah, S.; Hosny, M.; AlMuhaideb, S. An efficient greedy randomized heuristic for the maximum coverage facility location problem with drones in healthcare. Appl. Sci. 2022, 12, 1403. [Google Scholar] [CrossRef]
- Assunção, J.; Gandour, C.; Rocha, R. Deforestation slowdown in the Brazilian Amazon: Prices or policies? Environ. Dev. Econ. 2015, 20, 697–722. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drone Model | Speed (m/s) | Max Range (m) | Endurance (s) | Battery Cost (USD) | Cost (USD) | Application |
|---|---|---|---|---|---|---|
| (0) Skywalker Ready To Fly v2.2 | 25 | 20,000 | 3600 | 400 | 3400 | Surveillance |
| (1) Talon GT | 28 | 15,000 | 2700 | 300 | 2000 | Surveillance |
| (2) Believer | 20 | 20,000 | 7200 | 400 | 4600 | Surveillance |
| (3) Autel Evo II Dual 640 | 15 | 8800 | 2280 | 219 | 10,500 | Fire and Surveillance |
| (4) DJI Matrice 300 RTK | 23 | 15,000 | 3300 | 700 | 25,500 | Fire/Surveillance |
| (5) DJI Mavic 2 Enterprise Advanced | 20 | 10,000 | 1860 | 184 | 6500 | Fire/Surveillance |
| Coverage | Batteries | Drones | Operators | Cost (USD) | Total Demand | Base A | Base B | Max RT (s) | Min RT (s) | MIP Gap | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.9 | 1 | 29 | 36 | 15 | 198,867 | 15 | 15 | - | 617 | 50 | 4% |
| 3 | 42 | 18 | 12 | 158,557 | 12 | 12 | - | 641 | 57 | 7% | |
| 5 | 50 | 13 | 11 | 137,272 | 11 | 11 | - | 641 | 50 | 3% | |
| 0.95 | 1 | 40 | 44 | 16 | 226,112 | 16 | 16 | - | 617 | 42 | 3% |
| 3 | 59 | 24 | 14 | 176,499 | 13 | 13 | - | 638 | 54 | 6% | |
| 5 | 67 | 16 | 12 | 151,179 | 11 | 11 | - | 641 | 42 | 2% | |
| 0.99 | 1 | 73 | 76 | 21 | 341,858 | 18 | 15 | 3 | 617 | 13 | 3% |
| 3 | 107 | 38 | 19 | 240,816 | 15 | 23 | 2 | 641 | 14 | 4% | |
| 5 | 118 | 28 | 19 | 211,962 | 14 | 14 | - | 641 | 13 | 5% |
| Batteries | Drone Types | ||||||
|---|---|---|---|---|---|---|---|
| Coverage | 3 | 4 | 5 | 3 | 4 | 5 | |
| 0.9 | 1 | 28 | 0 | 1 | 34 | 0 | 2 |
| 3 | 30 | 0 | 12 | 13 | 0 | 5 | |
| 5 | 37 | 0 | 13 | 9 | 0 | 4 | |
| 0.95 | 1 | 38 | 1 | 1 | 41 | 1 | 2 |
| 3 | 52 | 0 | 7 | 20 | 0 | 4 | |
| 5 | 49 | 5 | 13 | 11 | 1 | 4 | |
| 0.99 | 1 | 71 | 1 | 1 | 73 | 1 | 2 |
| 3 | 103 | 6 | 14 | 43 | 2 | 6 | |
| 5 | 104 | 0 | 14 | 24 | 0 | 4 | |
| Coverage | Demand Scenario | Batteries | Drones | Operators | Cost (USD) | Total Demand | Base A | Base B | Max RT (s) | Min RT (s) | MIP Gap |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.9 | 1 | 42 | 18 | 12 | 158,557 | 12 | 12 | - | 641 | 57 | 7% |
| 0.9 | 3 | 84 | 33 | 15 | 203,794 | 13 | 13 | - | 704 | 43 | 4% |
| 0.9 | 5 | 121 | 46 | 21 | 260,032 | 16 | 15 | 1 | 629 | 15 | 5% |
| 0.95 | 1 | 59 | 24 | 14 | 176,499 | 13 | 13 | - | 638 | 54 | 6% |
| 0.95 | 3 | 105 | 41 | 18 | 238,624 | 15 | 15 | - | 768 | 15 | 4% |
| 0.95 | 5 | 148 | 56 | 24 | 300,631 | 17 | 16 | 1 | 751 | 15 | 3% |
| 0.99 | 1 | 107 | 38 | 19 | 240,816 | 15 | 23 | 2 | 641 | 14 | 4% |
| 0.99 | 3 | 158 | 58 | 26 | 314,231 | 17 | 15 | 2 | 647 | 15 | 3% |
| 0.99 | 5 | 204 | 74 | 33 | 380,361 | 19 | 16 | 3 | 617 | 15 | 3% |
| Batteries | Drone Types | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Coverage | Demand Scenario | 0 | 1 | 3 | 4 | 5 | 0 | 1 | 3 | 4 | 5 |
| 0.9 | 1 | 0 | 0 | 30 | 0 | 12 | 0 | 0 | 13 | 0 | 5 |
| 3 | 1 | 0 | 76 | 0 | 7 | 1 | 0 | 28 | 0 | 4 | |
| 5 | 0 | 0 | 113 | 3 | 5 | 0 | 0 | 42 | 1 | 3 | |
| 0.95 | 1 | 0 | 0 | 52 | 0 | 7 | 0 | 0 | 20 | 0 | 4 |
| 3 | 1 | 0 | 97 | 0 | 7 | 2 | 0 | 35 | 0 | 3 | |
| 5 | 1 | 0 | 142 | 0 | 5 | 1 | 0 | 52 | 0 | 3 | |
| 0.99 | 1 | 0 | 0 | 123 | 6 | 14 | 0 | 0 | 43 | 2 | 6 |
| 3 | 0 | 0 | 148 | 6 | 4 | 1 | 0 | 52 | 2 | 3 | |
| 5 | 0 | 2 | 199 | 0 | 3 | 0 | 1 | 71 | 0 | 2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Custodio, J.; Abeledo, H. Drone-Based Environmental Emergency Response in the Brazilian Amazon. Drones 2023, 7, 554. https://doi.org/10.3390/drones7090554
Custodio J, Abeledo H. Drone-Based Environmental Emergency Response in the Brazilian Amazon. Drones. 2023; 7(9):554. https://doi.org/10.3390/drones7090554
Chicago/Turabian StyleCustodio, Janiele, and Hernan Abeledo. 2023. "Drone-Based Environmental Emergency Response in the Brazilian Amazon" Drones 7, no. 9: 554. https://doi.org/10.3390/drones7090554
APA StyleCustodio, J., & Abeledo, H. (2023). Drone-Based Environmental Emergency Response in the Brazilian Amazon. Drones, 7(9), 554. https://doi.org/10.3390/drones7090554