
An Intelligent Grazing Development Strategy for Unmanned Animal Husbandry in China




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dynamic Comparative Analysis of Intelligent Grazing Technology in China and Other Countries
2.1. Pasture Remote Sensing and Grassland Ecological Maintenance Technology
2.2. Research on the Development of Intelligent Grazing
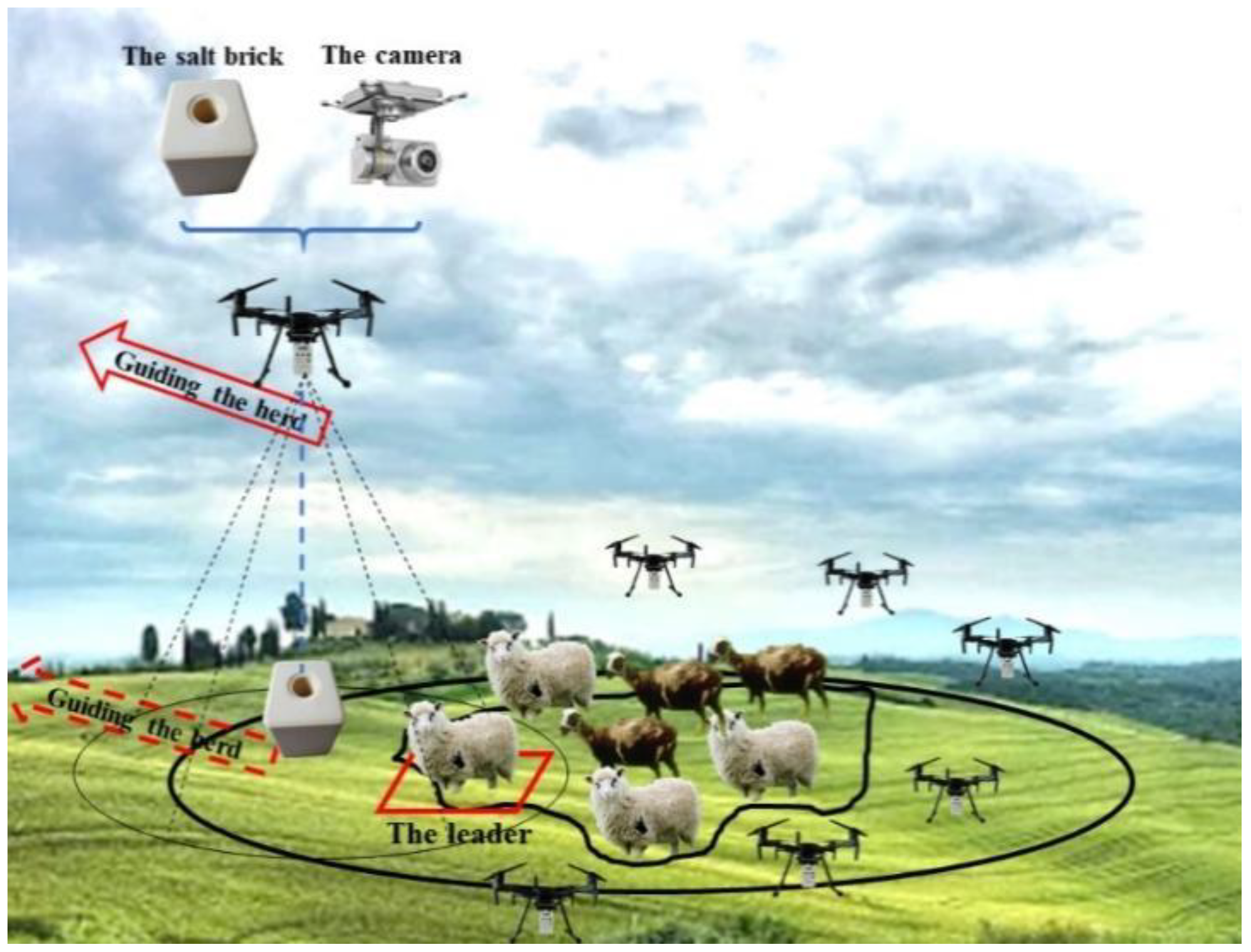
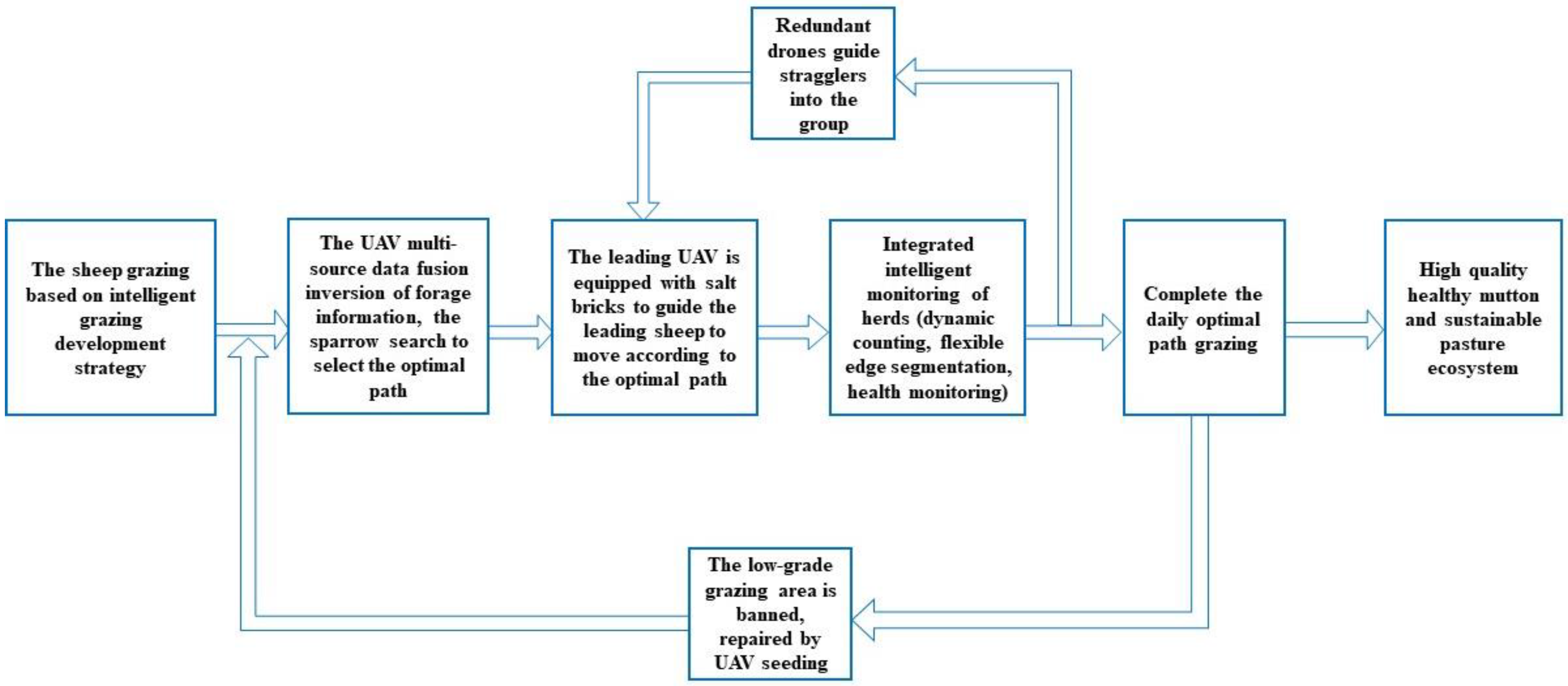
3. The Intelligent Grazing Development Strategy
4. Key Technologies of the Intelligent Grazing
4.1. The Remote Sensing of the Feeding Area Using the Sensing UAV to Solve the Perception Problem of Grazing Area and the Evaluation Technique of the Pasture Grade
4.1.1. The Inversion Model of the Vegetation Biomass and the Chlorophyll Content in the Pastoral Area
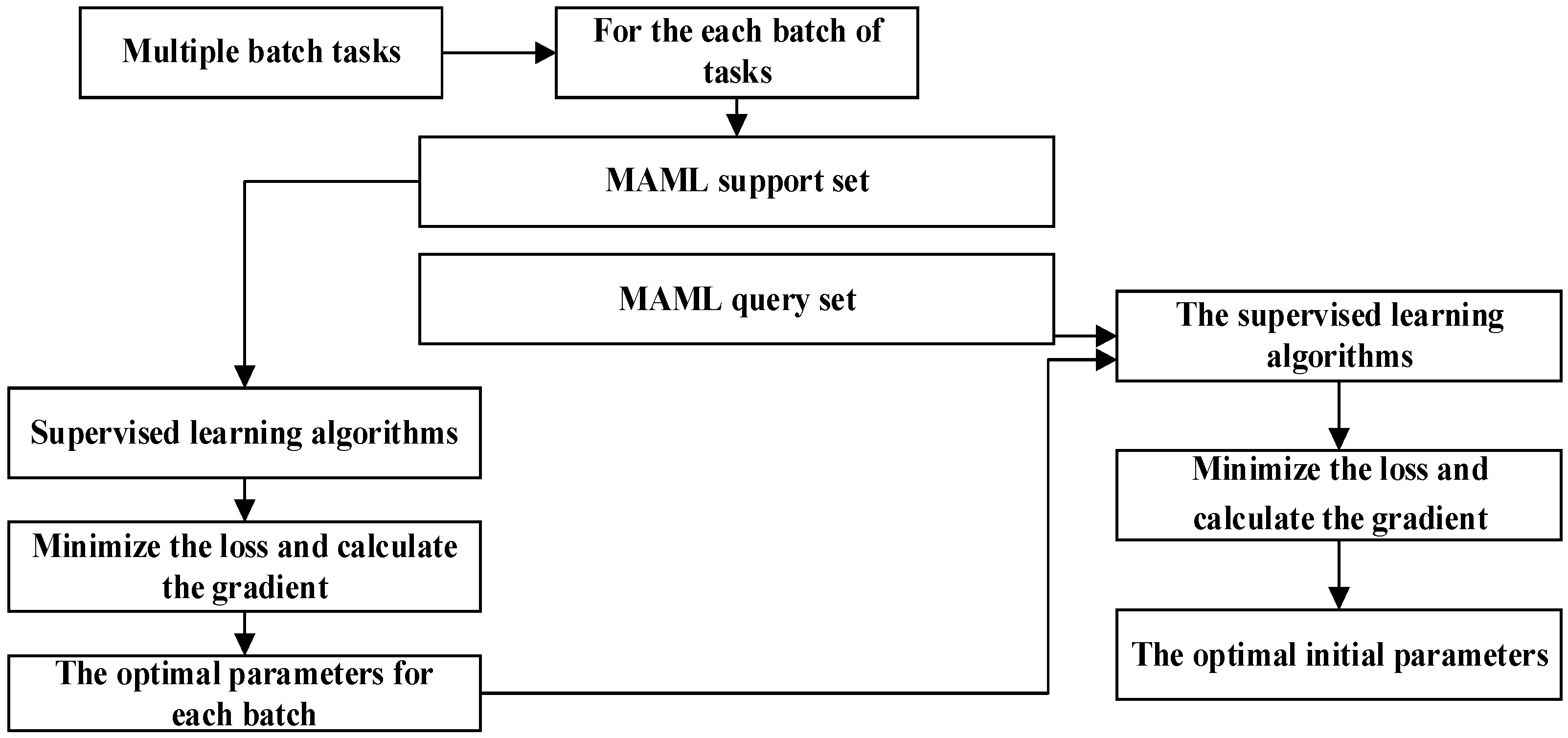
4.1.2. The Grazing Grade Assessment and the Autonomous Learning Assessment Model under the Scarce Samples
4.2. The Comprehensive Monitoring Technology of the Sensing UAV for the Herds
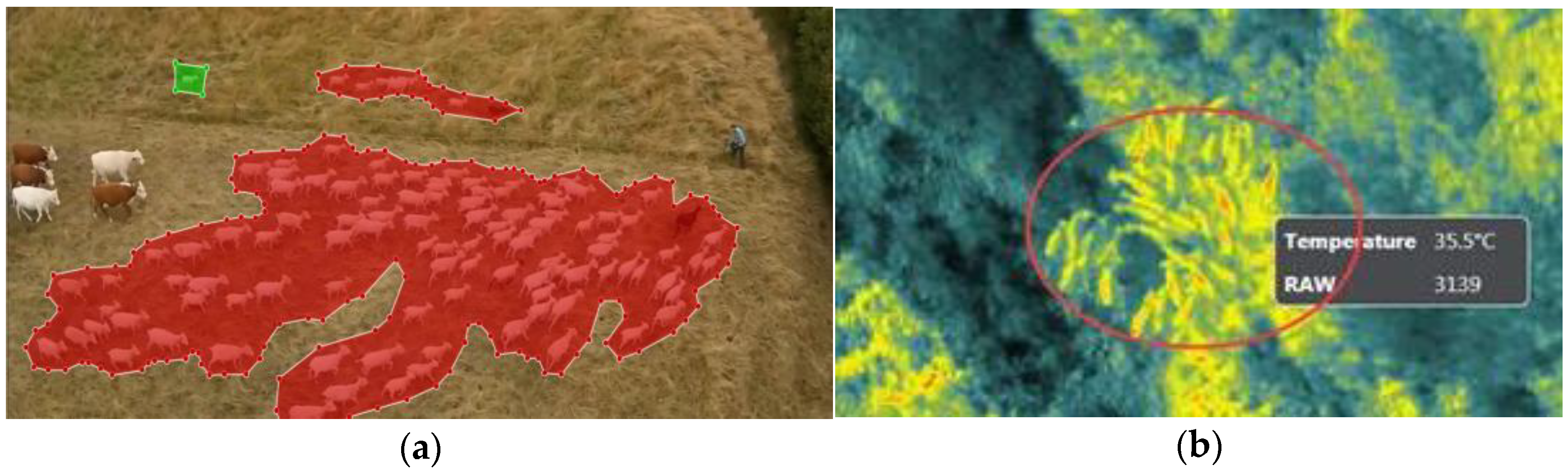
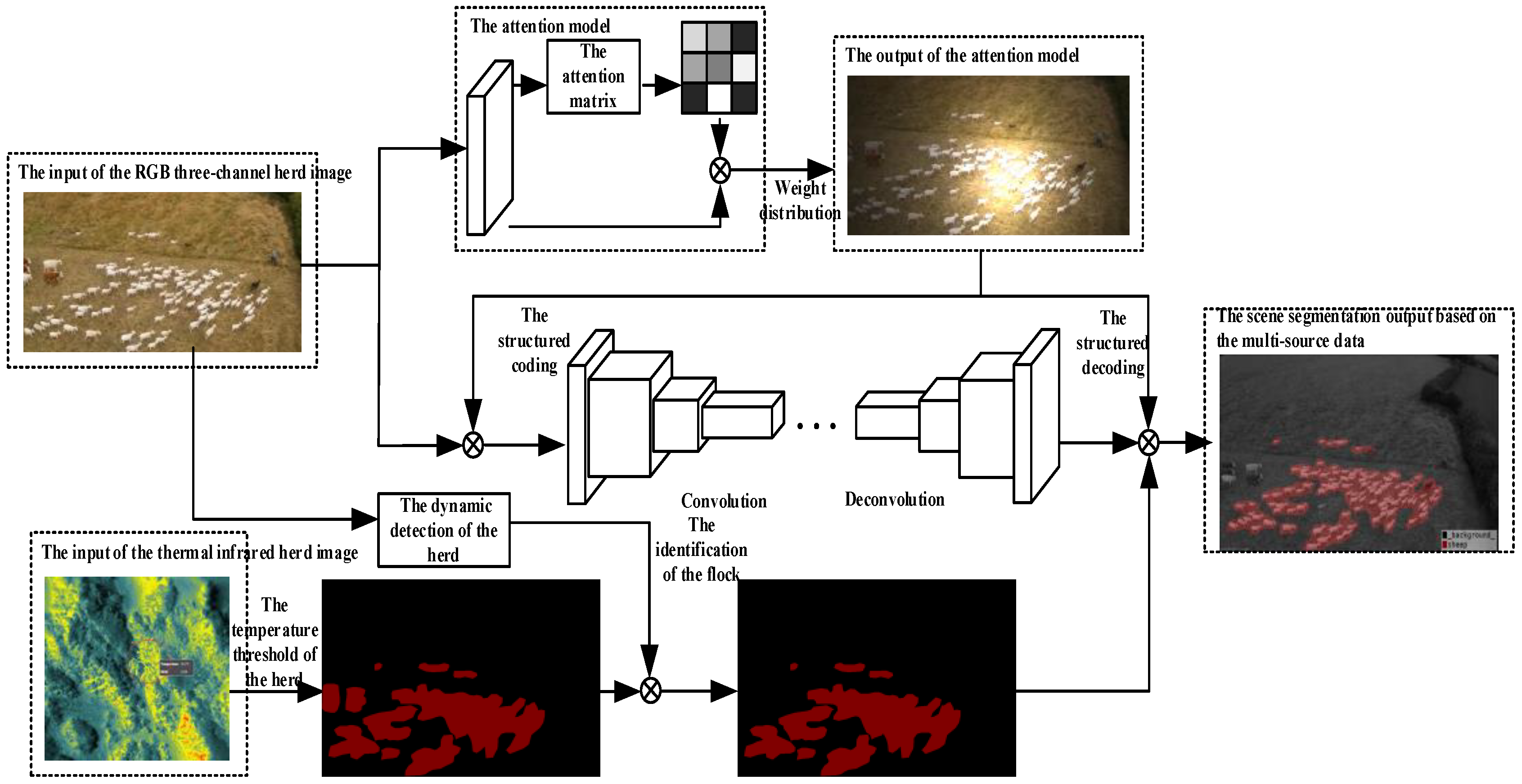
4.2.1. The Group Scene Segmentation and Dynamic Counting Based on Multi-Source Data
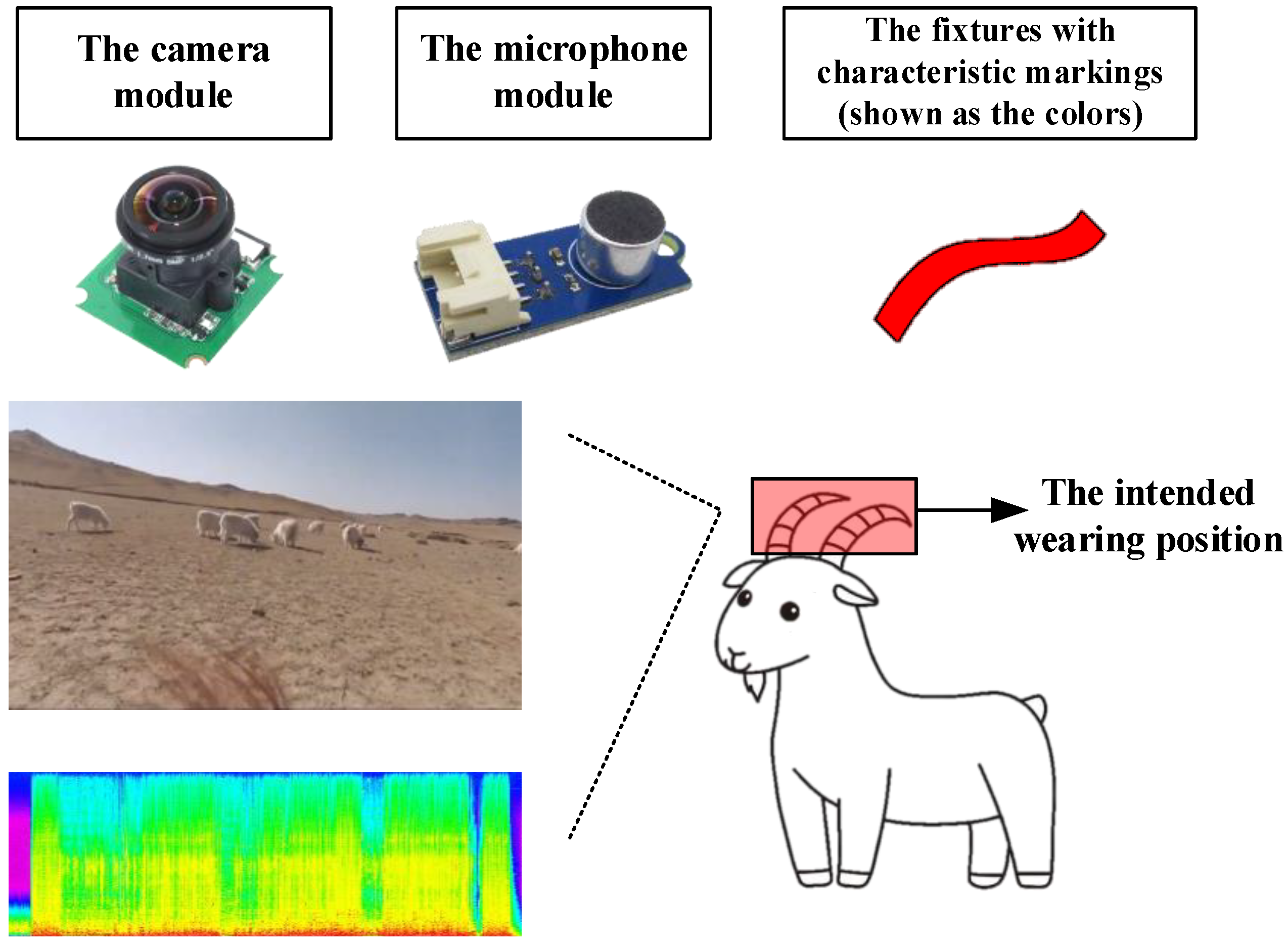
4.2.2. The Wearable Monitoring System of Herd Health and Individual Behavior
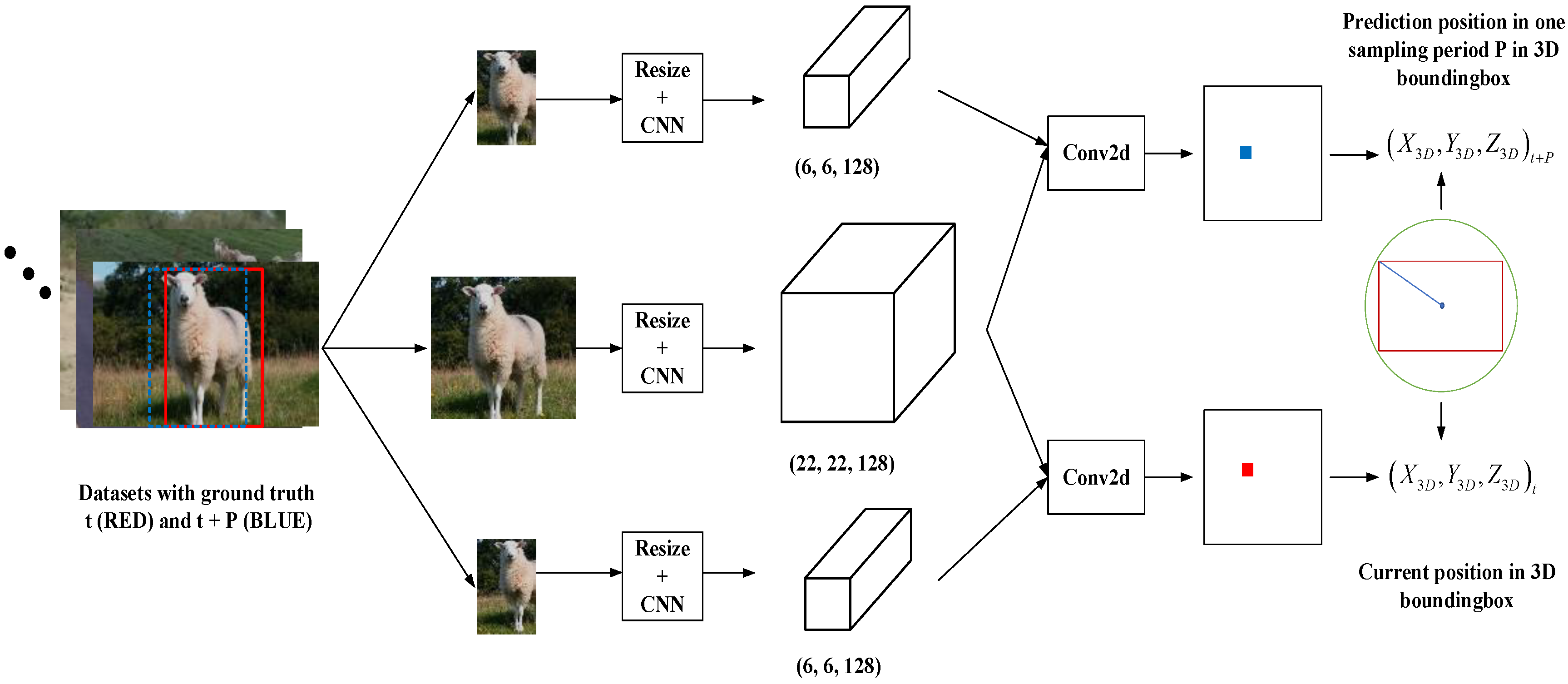
4.2.3. The Key Individual Perception and the Tracking Technique
4.3. The Cycle Grazing Path Planning Using the UAV
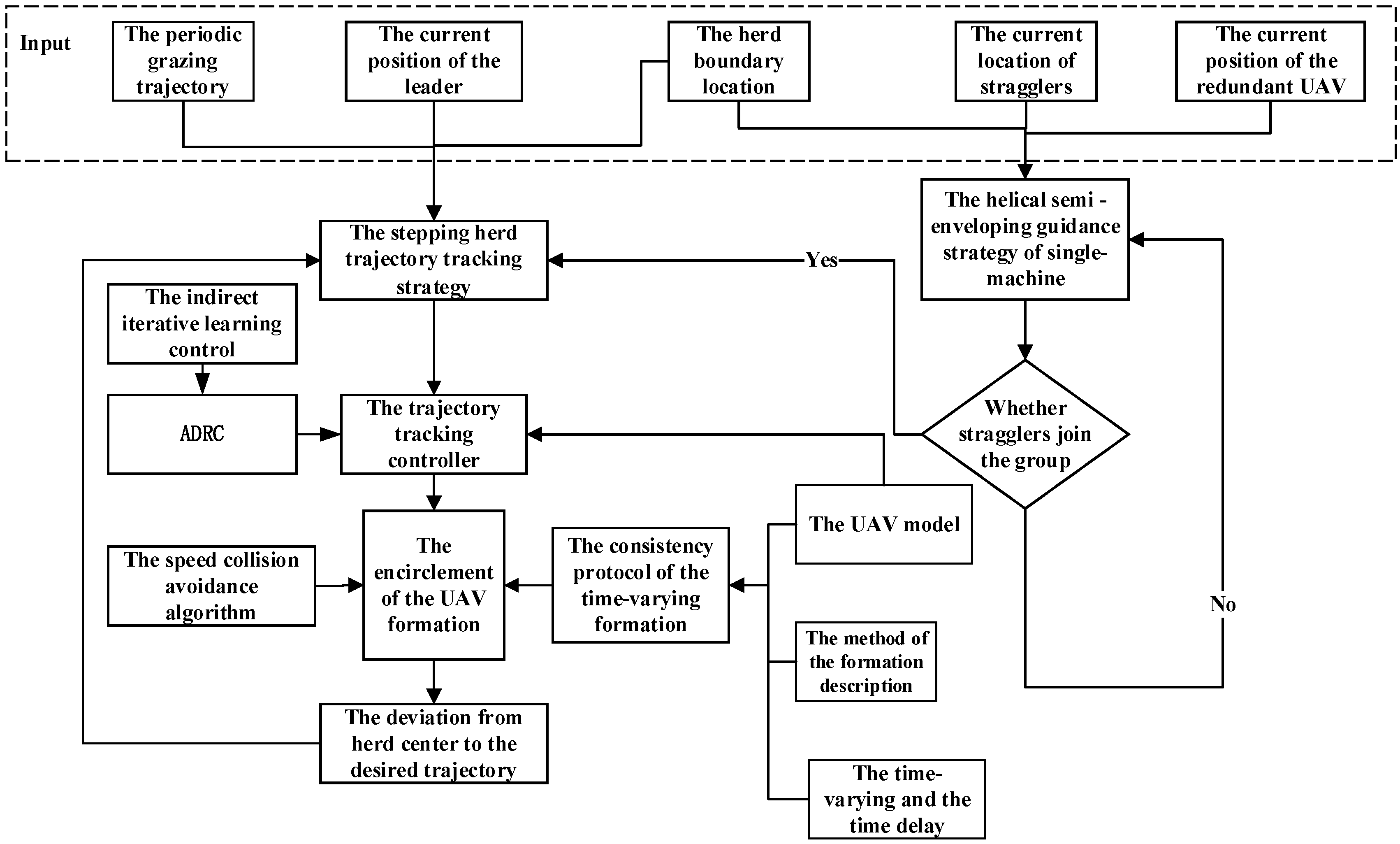
4.4. The Tracking and Encircling Control of the UAV Formation
4.4.1. The Trajectory Tracking Control of the Herd Based on the Active Disturbance Rejection Control and Indirect Iterative Learning
4.4.2. The Consensus Protocol of the Time-Varying Formation and the Obstacle Avoidance Algorithm Design for the Multi-Machine Cooperative Formation
4.4.3. The Regrouping Strategy of the Stragglers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, C.; Zhang, J.; Zhou, W. The effect of animal husbandry on economic growth: Evidence from 13 provinces of North China. Front. Environ. Sci. 2023, 10, 1085219. [Google Scholar] [CrossRef]
- Weisheng, C.; Long, G.; Ruilin, H.; Miaojie, Z.; Hongnan, L.; Yongling, H.; Yulong, Y. Sustainable development of animal husbandry in China. Bull. Chin. Acad. Sci. (Chin. Version) 2019, 34, 135–144. [Google Scholar]
- Shi, R.; Irfan, M.; Liu, G.; Yang, X.; Su, X. Analysis of the impact of livestock structure on carbon emissions of animal husbandry: A sustainable way to improving public health and green environment. Front. Public Health 2022, 10, 835210. [Google Scholar] [CrossRef]
- Zhao, X.; Xiong, C. Spatial and Temporal Characteristics, Evolution Law and Improvement Path of China’s Animal Husbandry Production Pattern. Sustainability 2022, 14, 15794. [Google Scholar] [CrossRef]
- Liu, L.; Wang, J.; Zhang, R.; Liu, G.; Xu, Z. Intelligent Grazing Strategy of Grassland Via Optimization of Multiple Phases. In Proceedings of the 2023 IEEE 8th International Conference on Big Data Analytics (ICBDA), Harbin, China, 3–5 March 2023; pp. 121–126. [Google Scholar]
- Huang, X.; Shi, B.; Wang, S.; Yin, C.; Fang, L. Mitigating environmental impacts of milk production via integrated maize silage planting and dairy cow breeding system: A case study in China. J. Clean. Prod. 2021, 309, 127343. [Google Scholar] [CrossRef]
- Ma, T.; Deng, K.; Tu, Y.; Zhang, N.; Zhao, Q.; Li, C. Recent advances in nutrient requirements of meat-type sheep in China: A review. J. Integr. Agric. 2022, 21, 14. [Google Scholar] [CrossRef]
- Busch, G.; Kassas, B.; Palma, M. Perceptions of antibiotic use in livestock farming in Germany, Italy and the United States. Livest. Sci. 2020, 241, 104251. [Google Scholar] [CrossRef]
- Wagner, K.; Brinkmann, J.; March, S. Impact of Daily Grazing Time on Dairy Cow Welfare—Results of the Welfare Quality Protocol. Animals 2018, 8, 1. [Google Scholar] [CrossRef]
- Aurousseau, B.; Bauchart, D.; Calichon, E. Effect of grass or concentrate feeding systems and rate of growth on triglyceride and phospholipid and their fatty acids in the longissimus thoracis of lambs. Meat Sci. 2004, 66, 531–541. [Google Scholar] [CrossRef]
- Ryschawy, J.; Choisis, N.; Choisis, J. Mixed crop-livestock systems: An economic and environmental-friendly way of farming. Animal 2012, 6, 1722–1730. [Google Scholar] [CrossRef]
- Villalba, D.; Díez-Unquera, B.; Carrascal, A. Multi-objective simulation and optimisation of dairy sheep farms: Exploring trade-offs between economic and environmental outcomes. Agric. Syst. 2019, 173, 107–118. [Google Scholar] [CrossRef]
- Guo, S.; Jiang, L.; Shen, G. Embodied pasture land use change in China 2000–2015: From the perspective of globalization. Land Use Policy 2019, 82, 476–485. [Google Scholar] [CrossRef]
- Hu, T.; Chabbi, A. Grassland management and integration during crop rotation impact soil carbon changes and grass-crop production. Agric. Ecosyst. Environ. 2022, 324, 107703. [Google Scholar] [CrossRef]
- Li, M.; Qi, Y.; Li, W. Livestock keeping of migrant households from perspective of livelihood and ecology: A case study in Yushu Tibetan autonomous prefecture, Qinghai province. Acta Sci. Nat. Univ. Pekin. 2021, 57, 773–782. (In Chinese) [Google Scholar]
- Wang, L.; Xiu, C. A micro-level analysis of the urbanization of emigrants from Inner Mongolian Pastoral areas. China Soft Sci. 2014, 3, 76–87. (In Chinese) [Google Scholar]
- Fan, M.; Li, Y.; Li, W. Solving one problem by creating a bigger one: The consequences of ecological resettlement for grassland restoration and poverty alleviation in Northwestern China. Land Use Policy 2015, 42, 124–130. [Google Scholar] [CrossRef]
- Vaintrub, M.; Levit, H. Precision livestock farming, automats and new technologies: Possible applications in extensive dairy sheep farming. Animal 2020, 15, 100143. [Google Scholar] [CrossRef]
- National Science and Technology Information System, Public Service Platform. Breeding of New Livestock and Poultry Varieties and Scientific and Technological Innovation of Modern Pasture. Available online: https://service.most.gov.cn/sbzn/20210518/4323.html (accessed on 18 May 2021).
- Rutter, S. Advanced livestock management solutions. Animal 2017, 14, 151–171. [Google Scholar]
- Wu, B.; Zhang, M.; Zeng, H.; Tian, F.; Potgieter, A.B.; Qin, X.; Yan, N.; Chang, S.; Zhao, Y.; Dong, Q.; et al. Challenges and opportunities in remote sensing-based crop monitoring: A review. Natl. Sci. Rev. 2023, 10, nwac290. [Google Scholar] [CrossRef]
- Bao, W.; Zhu, Z.; Hu, G.; Zhou, X.; Zhang, D.; Yang, X. UAV remote sensing detection of tea leaf blight based on DDMA-YOLO. Comput. Electron. Agric. 2023, 205, 107637. [Google Scholar] [CrossRef]
- Omia, E.; Bae, H.; Park, E.; Kim, M.S.; Baek, I.; Kabenge, I.; Cho, B.K. Remote Sensing in Field Crop Monitoring: A Comprehensive Review of Sensor Systems, Data Analyses and Recent Advances. Remote Sens. 2023, 15, 354. [Google Scholar] [CrossRef]
- Peprah, S.; Damiran, D.; Biligetu, B. Evaluation of cool-season binary mixtures as pasture: Herbage yield, nutritive value, and beef cattle performance. Livest. Sci. 2021, 248, 104501. [Google Scholar] [CrossRef]
- Allen, I.; Robertson, S.; Broster, J. Evaluation of tall fescue cultivars containing endophytes on pasture productivity and lamb performance. Small Rumin. Res. 2021, 202, 106463. [Google Scholar] [CrossRef]
- Sánchez-Sastre, L.; Casterad, M.; Guillén, M. UAV Detection of Sinapis arvensis Infestation in Alfalfa Plots Using Simple Vegetation Indices from Conventional Digital Cameras. AgriEngineering 2020, 2, 206–212. [Google Scholar] [CrossRef]
- Cazenave, A.; Shah, K.; Trammell, T. High-Throughput Approaches for Phenotyping Alfalfa Germplasm under Abiotic Stress in the Field. Plant Phenome J. 2019, 2, 1–13. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.; Xie, D. Application of synthetic NDVI time series blended from Landsat and MODIS data for grassland biomass estimation. Remote Sens. 2015, 8, 10. [Google Scholar] [CrossRef]
- Song, Q.; Cui, X.; Zhang, Y. Grassland fractional vegetation cover analysis using small UVAs and MODIS—A case study in Gannan prefecture. Pratacultural Sci. 2017, 34, 40–50. [Google Scholar]
- Rueda-Ayala, V.; Peña, J.; Höglind, M. Comparing UAV-based technologies and RGB-D reconstruction methods for plant height and biomass monitoring on grass ley. Sensors 2019, 19, 535. [Google Scholar] [CrossRef]
- Tang, Z.; Parajuli, A.; Chen, C. Validation of UAV-based alfalfa biomass predictability using photogrammetry with fully automatic plot segmentation. Sci. Rep. 2021, 11, 256. [Google Scholar] [CrossRef]
- Song, Z.; Wang, P.; Zhang, Z.; Yang, S.; Ning, J. Recognition of sunflower growth period based on deep learning from UAV remote sensing images. Precis. Agric. 2023, 24, 1417–1438. [Google Scholar] [CrossRef]
- Liu, Y.; Pan, Q.; Liu, H. Plant responses following grazing removal at different stocking rates in an Inner Mongolia grassland ecosystem. Plant Soil 2011, 340, 199–213. [Google Scholar] [CrossRef]
- Neilly, H.; Ward, M.; Cale, P. Converting rangelands to reserves: Small mammal and reptile responses 24 years after domestic livestock grazing removal. Austral Ecol. 2021, 46, 1112–1124. [Google Scholar] [CrossRef]
- Marrs, R.; Sánchez, R.; Connor, L. Effects of removing sheep grazing on soil chemistry, plant nutrition and forage digestibility: Lessons for rewilding the British uplands. Ann. Appl. Biol. 2018, 173, 294–301. [Google Scholar] [CrossRef]
- Wilmer, H.; Augustine, D.; Derner, J. Assessing the rate and reversibility of large-herbivore effects on community composition in a semi-arid grassland ecosystem. J. Veg. Sci. 2021, 32, 12934. [Google Scholar] [CrossRef]
- Porensky, L.; Augustine, D.; Derner, J. Collaborative adaptive rangeland management, multipaddock rotational grazing, and the story of the regrazed grass plant. Rangel. Ecol. Manag. 2021, 78, 127–141. [Google Scholar] [CrossRef]
- Mosier, S.; Apfelbaum, S.; Byck, P. Adaptive multi-paddock grazing enhances soil carbon and nitrogen stocks and stabilization through mineral association in southeastern US grazing lands. J. Environ. Manag. 2021, 288, 112409. [Google Scholar] [CrossRef]
- Davidson, A.; Hunter, E.; Erz, J. Reintroducing a keystone burrowing rodent to restore an arid North American grassland: Challenges and successes. Restor. Ecol. 2018, 26, 909–920. [Google Scholar] [CrossRef]
- Wang, Z.; Li, X.; Ji, B. Coupling between the responses of plants, soil, and microorganisms following grazing exclusion in an overgrazed grassland. Front. Plant Sci. 2021, 12, 640789. [Google Scholar] [CrossRef]
- Messiga, A.; Ziadi, N.; Bélanger, G. Soil nutrients and other major properties in grassland fertilized with nitrogen and phosphorus. Soil Sci. Soc. Am. J. 2013, 77, 643–652. [Google Scholar] [CrossRef]
- Sun, X.; Chen, J.; Liu, L. Effects of magnesium fertilizer on the forage crude protein content depend upon available soil nitrogen. J. Agric. Food Chem. 2018, 66, 1743–1750. [Google Scholar] [CrossRef]
- Oram, N.; Ravenek, J.; Barry, K. Below-ground complementarity effects in a grassland biodiversity experiment are related to deep-rooting species. J. Ecol. 2018, 106, 265–277. [Google Scholar] [CrossRef]
- Li, L.; Wang, G.; Liang, F. The design of grassland soil-gashing and root-cutting machine with profiling mechanism. In Proceedings of the 2015 ASABE Annual International Meeting, New Orleans, LA, USA, 26–29 July 2015; pp. 1–7. [Google Scholar]
- Zhang, S.; Wei, Y.; Liu, N. Mowing Facilitated Shoot and Root Litter Decomposition Compared with Grazing. Plants 2022, 11, 846. [Google Scholar] [CrossRef] [PubMed]
- Rao, M.; Tang, P.; Zhang, Z. Spatial–spectral relation network for hyperspectral image classification with limited training samples. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 5086–5100. [Google Scholar] [CrossRef]
- Sun, S.; Wang, C.; Yin, X. Estimating aboveground biomass of natural grassland based on multispectral images of Unmanned Aerial Vehicles. J. Remote Sens. 2018, 22, 848–856. [Google Scholar] [CrossRef]
- Zolkos, S.; Goetz, S.; Dubayah, R. A meta-analysis of terrestrial aboveground biomass estimation using LiDAR remote sensing. Remote Sens. Environ. 2013, 128, 289–298. [Google Scholar] [CrossRef]
- Han, L.; Tao, P.; Martin, R. Livestock detection in aerial images using a fully convolutional network. Comput. Vis. Media 2019, 5, 221–228. [Google Scholar] [CrossRef]
- Rivas, A.; Chamoso, P.; González-Briones, A. Detection of cattle using drones and convolutional neural networks. Sensors 2018, 18, 2048. [Google Scholar] [CrossRef]
- Barbedo, J.; Koenigkan, L.; Santos, T. A study on the detection of cattle in UAV images using deep learning. Sensors 2019, 19, 5436. [Google Scholar] [CrossRef]
- Li, D.; Qian, Y.; Wang, C. Estimation of walking speed of grazing sheep based on grazing spatio-temporal trajectory data. Chin. J. Grassl. 2019, 41, 152–159. [Google Scholar]
- Hu, B.; Guo, Y. Rear livestock location system based on RFID and UAV. Comput. Meas. Control 2017, 25, 239–242. [Google Scholar]
- Kristan, M.; Leonardis, A.; Matas, J. The visual object tracking vot2017 challenge results. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 1949–1972. [Google Scholar]
- Le, W.; Xue, Z.; Chen, J.; Zhang, Z. Coverage path planning based on the optimization strategy of multiple solar powered unmanned aerial vehicles. Drones 2022, 6, 203. [Google Scholar] [CrossRef]
- Tsai, C.; Tsai, C.; Tseng, C. A new hybrid heuristic approach for solving large traveling salesman problem. Inf. Sci. 2004, 166, 67–81. [Google Scholar] [CrossRef]
- Fu, J.; Sun, G.; Liu, J.; Yao, W.; Wu, L. On Hierarchical Multi-UAV Dubins Traveling Salesman Problem Paths in a Complex Obstacle Environment. IEEE Trans. Cybern. 2023. [Google Scholar] [CrossRef]
- Fuertes, D.; del Blanco, C.R.; Jaureguizar, F.; Navarro, J.J.; García, N. Solving routing problems for multiple cooperative Unmanned Aerial Vehicles using Transformer networks. Eng. Appl. Artif. Intell. 2023, 122, 106085. [Google Scholar] [CrossRef]
- Niendorf, M.; Kabamba, P.; Girard, A. Stability of Solutions to Classes of Traveling Salesman Problems. IEEE Trans. Cybern. 2016, 46, 973–985. [Google Scholar] [CrossRef]
- Mingozzi, A.; Ricciardelli, B. Dynamic Programming Strategies for the Traveling Salesman Problem with Time Window and Precedence Constraints. Oper. Res. 1997, 45, 365–377. [Google Scholar] [CrossRef]
- Moon, C.; Kim, J.; Choi, G. An efficient genetic algorithm for the traveling salesman problem with precedence constraints. Eur. J. Oper. Res. 2002, 140, 606–617. [Google Scholar] [CrossRef]
- Yuan, Q.; Han, C. Research on Robot Path Planning Based on Smooth A* Algorithm for Different Grid Scale Obstacle Environment. J. Comput. Theor. Nanosci. 2016, 13, 5312–5321. [Google Scholar] [CrossRef]
- Osmankovic, D.; Tahirovic, A.; Magnani, G. All terrain vehicle path planning based on D* lite and MPC based planning paradigm in discrete space. In In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 334–339. [Google Scholar]
- Yu, L.; Kong, D.; Shao, X. A Path Planning and Navigation Control System Design for Driverless Electric Bus. IEEE Access 2018, 6, 53960–53975. [Google Scholar] [CrossRef]
- Liu, J.; Yang, J.; Liu, H. An improved ant colony algorithm for robot path planning. Soft Comput. 2017, 21, 5829–5839. [Google Scholar] [CrossRef]
- Ollervides-Vazquez, E.J.; Tellez-Belkotosky, P.A.; Santibañez, V.; Rojo-Rodriguez, E.G.; Reyes-Osorio, L.A.; Garcia-Salazar, O. Modeling and Simulation of an Octorotor UAV with Manipulator Arm. Drones 2023, 7, 168. [Google Scholar] [CrossRef]
- Chen, T.; Yuan, J.; Yang, H. Event-triggered adaptive neural network backstepping sliding mode control of fractional-order multi-agent systems with input delay. J. Vib. Control 2022, 28, 3740–3766. [Google Scholar] [CrossRef]
- Chen, T.; Yuan, J. Command-filtered adaptive containment control of fractional-order multi-agent systems via event-triggered mechanism. Trans. Inst. Meas. Control 2023, 45, 1646–1660. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, Z.; Deng, C. Adaptive fuzzy global sliding mode control for trajectory tracking of quadrotor UAVs. Nonlinear Dyn. 2019, 97, 609–627. [Google Scholar] [CrossRef]
- Baek, J.; Kang, M. A synthesized sliding-mode control for attitude trajectory tracking of quadrotor uav systems. IEEE/ASME Trans. Mechatron. 2023. [Google Scholar] [CrossRef]
- Shen, S.; Xu, J.; Chen, P.; Xia, Q. Adaptive Neural Network Extended State Observer-Based Finite-Time Convergent Sliding Mode Control for a Quad Tiltrotor UAV. IEEE Trans. Aerosp. Electron. Syst. 2023. [Google Scholar] [CrossRef]
- Wang, D.; Pan, Q.; Shi, Y. Efficient Nonlinear Model Predictive Control for Quadrotor Trajectory Tracking: Algorithms and Experiment. IEEE Trans. Cybern. 2021, 51, 5057–5068. [Google Scholar] [CrossRef]
- Wu, T.; Zhu, Y.; Zhang, L.; Yang, J.; Ding, Y. Unified Terrestrial/Aerial Motion Planning for HyTAQs via NMPC. IEEE Robot. Autom. Lett. 2023, 8, 1085–1092. [Google Scholar] [CrossRef]
- Chao, Z.; Zhou, S.; Ming, L. UAV Formation Flight Based on Nonlinear Model Predictive Control. Math. Probl. Eng. 2012, 45, 643–657. [Google Scholar] [CrossRef]
- Li, H.; Zhu, Y.; Jing, L. Consensus of second-order delayed nonlinear multi-agent systems via node-based distributed adaptive completely intermittent protocols. Appl. Math. Comput. 2018, 326, 1–15. [Google Scholar] [CrossRef]
- Mu, X.; Zheng, B.; Liu, K. L2-L∞ containment control of multi-agent systems with markovia switching topologies and non-uniform time-varying delays. IET Control Theory Appl. 2014, 8, 863–872. [Google Scholar] [CrossRef]
- Cui, G.; Xu, H.; Chen, X.; Yu, J. Fixed-Time Distributed Adaptive Formation Control for Multiple QUAVs with Full-State Constraints. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4192–4206. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Zhang, Z. The Algorithm for UAV Obstacle Avoidance and Route Planning Based on Reinforcement Learning. In Proceedings of the 11th International Conference on Modelling, Identification and Control (ICMIC2019); Springer: Singapore, 2020; pp. 747–754. [Google Scholar]
- Zhang, Z.; Chen, J.; Xu, X.; Liu, C.; Han, Y. Hawk-eye-inspired perception algorithm of stereo vision for obtaining orchard 3D point cloud navigation map. CAAI Trans. Intell. Technol. 2022. [Google Scholar] [CrossRef]
- Song, Z.; Xin, Z.; Zhu, Y. Characteristics of shrub communities in communities in the desert-steppe ecotone of Inner Mongolia, China. J. Desert Res. 2022, 42, 104–112. (In Chinese) [Google Scholar]
- Cao, Y.; Chen, J.; Zhang, Z. A sheep dynamic counting scheme based on the fusion between an improved-sparrow-search YOLOv5x-ECA model and few-shot deepsort algorithm. Comput. Electron. Agric. 2023, 206, 107696. [Google Scholar] [CrossRef]
- Thatipelli, A.; Narayan, S.; Khan, S.; Anwer, R.M.; Khan, F.S.; Ghanem, B. Spatio-temporal relation modeling for few-shot action recognition. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 19958–19967. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J. Fully-convolutional siamese networks for object tracking. In In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–10 and 15–16 October 2016; pp. 850–865. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. Imagenet classification with deep convolutional neural networks. In Advances in Neural Information Processing Systems; Morgan Kaufmann Publishers: Burlington, MA, USA, 2012; p. 25. [Google Scholar]
- Zhang, Z.; Wang, S.; Chen, J.; Han, Y. A Bionic Dynamic Path Planning Algorithm of the Micro UAV Based on the Fusion of Deep Neural Network Optimization/Filtering and Hawk-Eye Vision. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 3728–3740. [Google Scholar] [CrossRef]
- Sayed, G.; Khoriba, G.; Haggag, M. A novel chaotic salp swarm algorithm for global optimization and feature selection. Appl. Intell. 2018, 48, 3462–3481. [Google Scholar] [CrossRef]
- Abdollahzadeh, B.; Gharehchopogh, F.; Mirjalili, S. African vultures optimization algorithm: A new nature-inspired metaheuristic algorithm for global optimization problems. Comput. Ind. Eng. 2021, 158, 107408. [Google Scholar] [CrossRef]
- Yang, X. A new metaheuristic bat-inspired algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); Springer: Berlin/Heidelberg, Germany, 2010; pp. 4681–4690. [Google Scholar]
- Wang, S.; Han, Y.; Chen, J. UAV attitude active disturbance rejection control based on iterative learning control. Acta Aeronaut. Astronaut. Sin. 2020, 41, 319–331. (In Chinese) [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Chen, T.; Zhang, Z.; Chen, J. An Intelligent Grazing Development Strategy for Unmanned Animal Husbandry in China. Drones 2023, 7, 542. https://doi.org/10.3390/drones7090542
Cao Y, Chen T, Zhang Z, Chen J. An Intelligent Grazing Development Strategy for Unmanned Animal Husbandry in China. Drones. 2023; 7(9):542. https://doi.org/10.3390/drones7090542
Chicago/Turabian StyleCao, Yuanyang, Tao Chen, Zichao Zhang, and Jian Chen. 2023. "An Intelligent Grazing Development Strategy for Unmanned Animal Husbandry in China" Drones 7, no. 9: 542. https://doi.org/10.3390/drones7090542
APA StyleCao, Y., Chen, T., Zhang, Z., & Chen, J. (2023). An Intelligent Grazing Development Strategy for Unmanned Animal Husbandry in China. Drones, 7(9), 542. https://doi.org/10.3390/drones7090542