



Towards the Designing of Low-Latency SAGIN: Ground-to-UAV Communications over Interference Channel




Abstract
1. Introduction
1.1. Background and Motivation
1.2. Contributions
- An information-theoretic framework is presented for the design of an optimal ground-to-UAV communication network that minimizes end-to-end transmission delay. The proposed framework is useful as it describes the minimum transmission latency a UAV network must satisfy while achieving a given level of reliability in terms of the average error probability. In particular, we first derive a tight upper bound for the capacity of the air-to-ground integrated channel in the presence of interference and white noise. Subsequently, given the reliability constraint, a framework is developed to analyze the delay introduced in the channel.
- A straight-line, circular, and helical trajectories are considered for UAV tracing. Further, considering the general air-to-ground network with inter-relay communication, the results are presented to comprehensively characterize the optimal performance of the system towards end-to-end delay minimization. It is shown that despite the simplicity of the point-to-point direct link, the latency of the amplify-and-forward (AF) relayed-based link can be lower if the relay is properly located.
- In addition, the power consumption restriction in the air-to-ground and air-to-air networks is considered. Within the range of allowable system latency, the optimal transmit power is derived based on the location information of a UAV. From the analysis, it is shown that increasing the transmission power is not always the proper solution to the delay minimization problem.
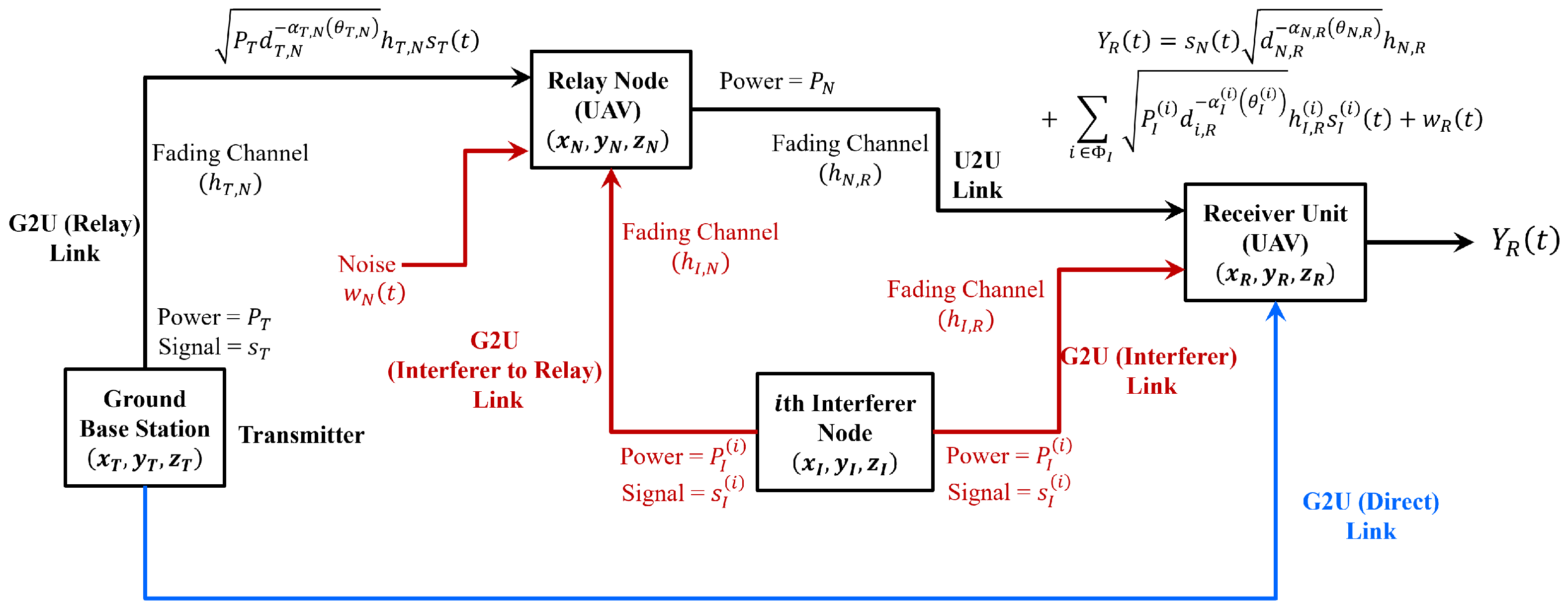
2. System Model
Proof of (8)
3. Delay Analysis
- What is the transmission latency of the G2U communication link under the given system parameters?
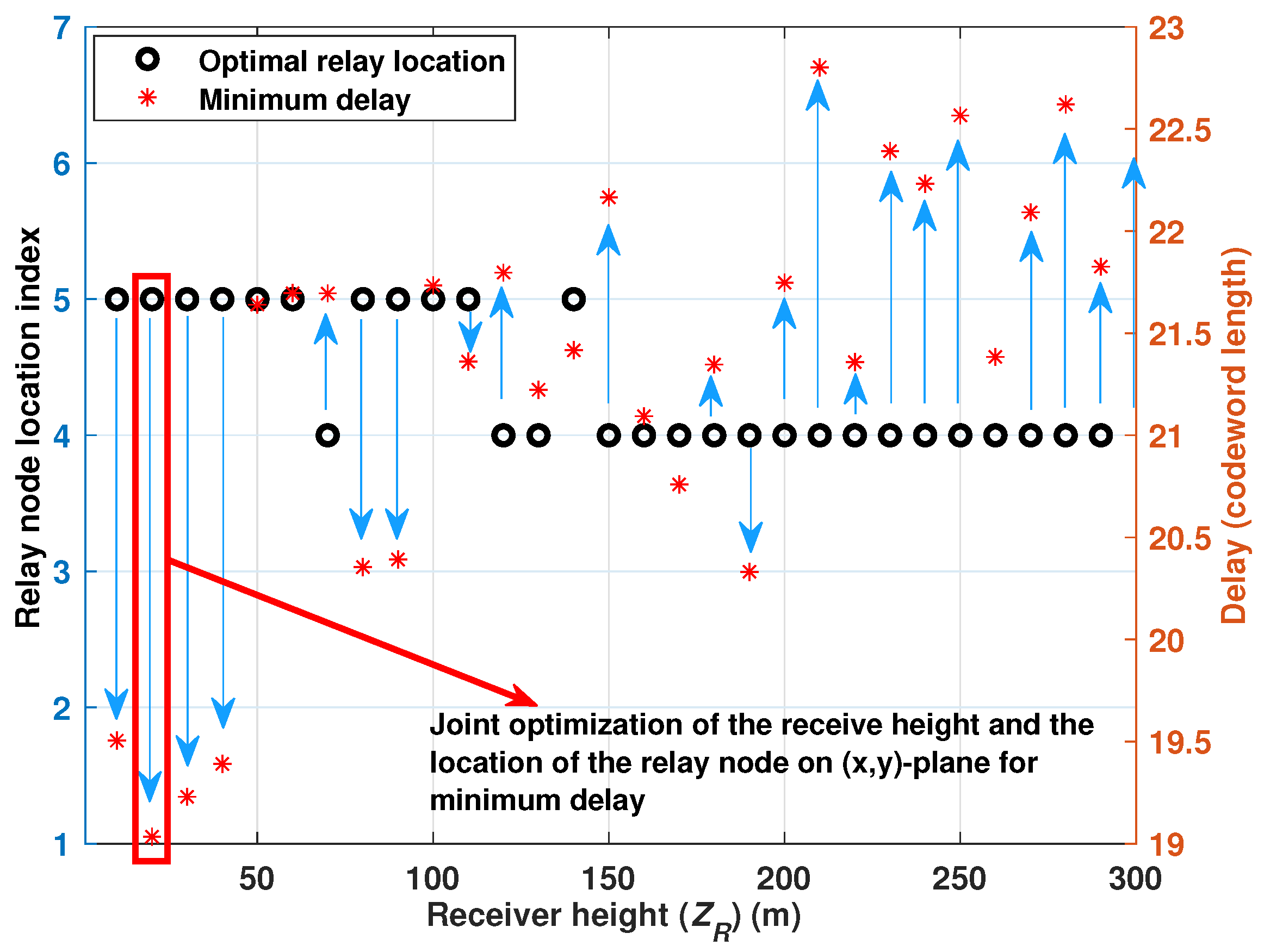
- What are the optimal locations of the relay and the UAV to have a positive impact in minimizing the transmission delay?
3.1. A Note on Fano’s Inequality
3.2. Proof of (18)
4. Results and Analysis
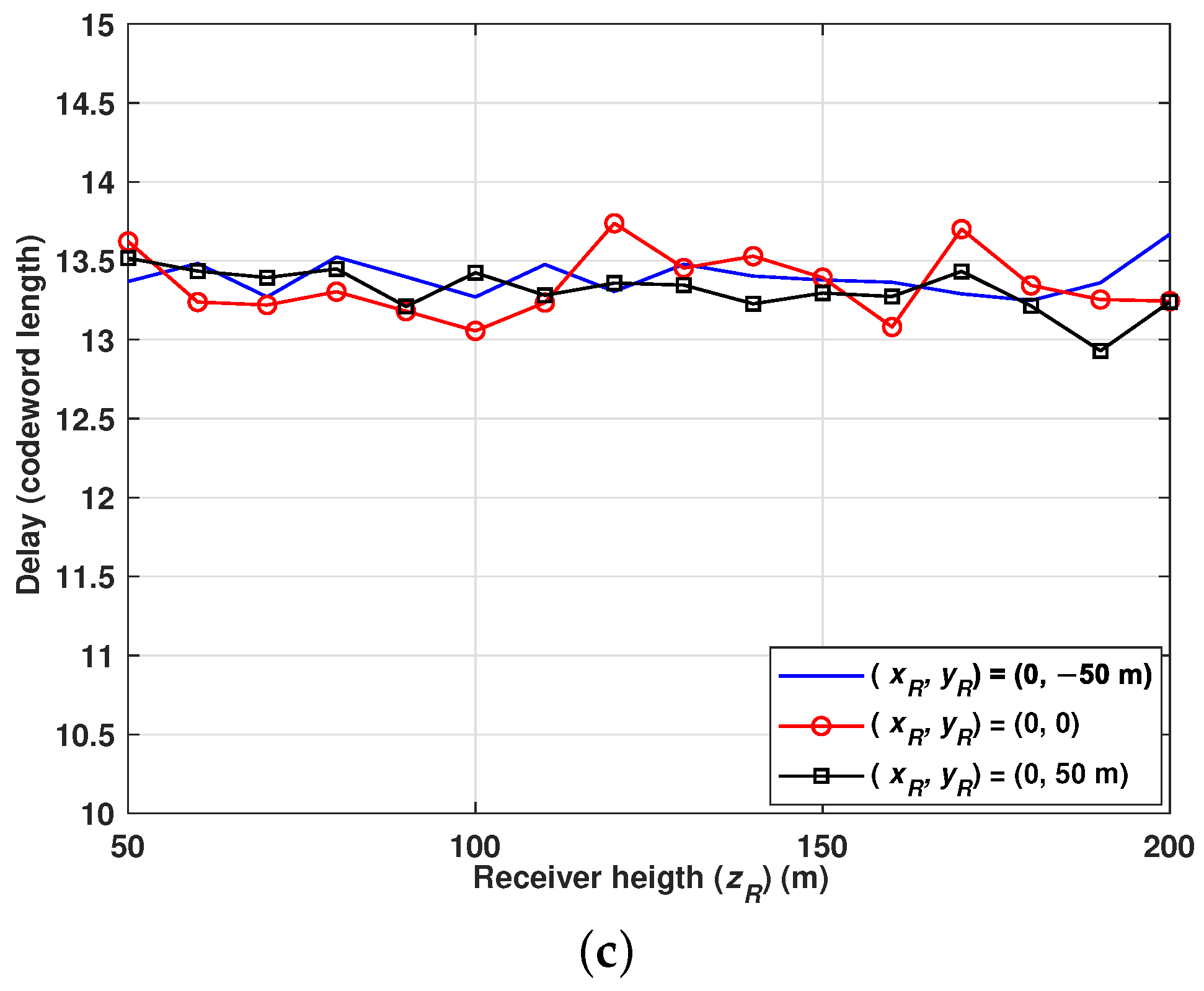
- Case I: It considers a scenario where the receiver is located above in a region near the vicinity of the transmitter;
- Case II: It considers a scenario where the receiver is located above in a region near the midway of the line joining the transmitter and the receiver;
- Case III: It considers a scenario where the receiver is located above in a region near the vicinity of the interfering node.
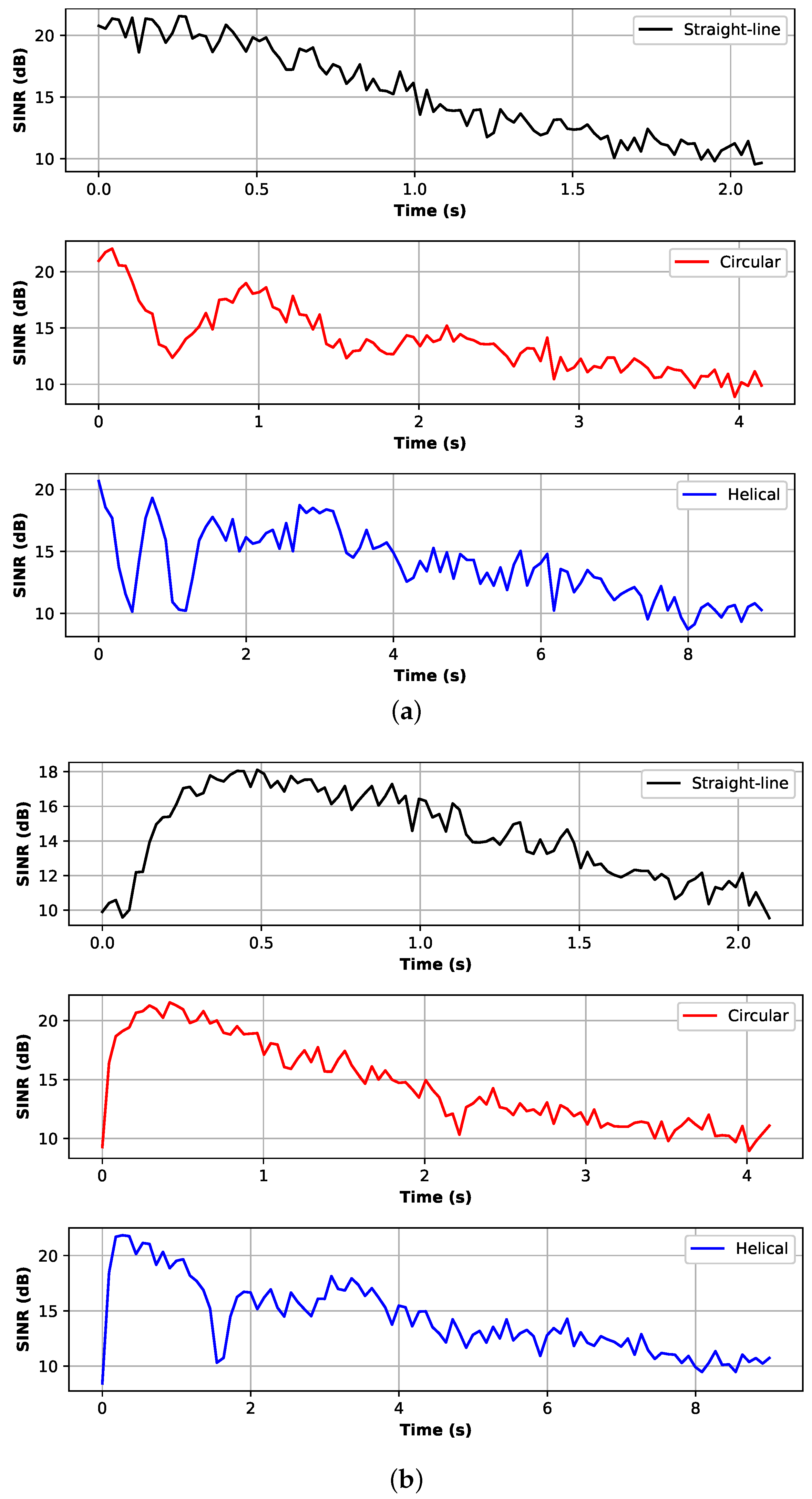
Performance over Different UAV Trajectories and Optimal Relay Selection
- If the UAV is located near the midpoint such that, , the delay first increases rapidly with the height and then decreases gradually with further increasing the UAV height. This monotonic behavior can be attributed to the fact that increasing the height initially causes received signal power to decrease relatively at a higher rate than interference and thereby reduces the number of packets successfully received. However, at larger heights, the impact of the interference signal also reduces, thus causing the delay to decrease gradually.
- Interestingly, and contrary to the above point, if the UAV is located near the midpoint such that , increasing the height does not reflect significant changes in the delay.
- As can be seen, the impact of increasing the signal power in minimizing the transmission delay dominates only if the UAV is located near a region above the transmitter. However, it is to be noted that the negative rate of change of delay with respect to the change in approaches zero for larger values of . Moreover, it is also important to note that, as the UAV approaches a region away from the transmitter and near the interferer, the rate even for smaller values of . It shows that increasing gives a negligible gain in terms of minimizing the transmission delay, though may greatly enhance the outage performance.
- As low values, increasing the height of the UAV does not necessarily impact the delay performance. However, as increases, the delay performance degrades with increasing the height.
- Given the reliability constraint and fixed NIP value, there exists a non-linear relation between the allowable transmission delay and the corresponding transmit power requirements. As can be seen, the required transmit power reduces significantly when the allowable transmission delay is relaxed from its initial value. However, on further relaxing the delay requirement, the required transmit power reduces gradually. This phenomenon validates our claim that increasing the signal power beyond a certain limit may not be an optimal solution to the delay minimization problem.
- Given the delay requirement and the reliability constraint, the required signal power increases with increasing NIP. Importantly, it is to be noted that, this behavior follows a constant rate of change of required transmit power with respect to the change in NIP, irrespective of the delay requirement.
- For the relayed-assisted network, we assume that there is no direct path between the BS and the receiver UAV. Thus, the relay UAV in our case serves primarily as compensation for channel degradation due to the path loss and fading between the ground BS and the receiver UAV. Therefore, no additional diversity is achieved in this case.
- The relayed UAV utilizes an amplify-and-forward relaying protocol. Therefore, these results will serve as a lower bound when compared with the conventional decode-and-forward protocol.
5. Conclusions
6. Challenges and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3GPP | Third Generation Partnership Project |
| AF | Amplify-and-Forward |
| AWGN | Additive White Gaussian Noise |
| BS | Base Station |
| C2 | Command and Control |
| eMBB | Enhanced Mobile Broadband |
| eVTOL | Electrical Vertical Take-off and Landing |
| FAA | Federal Aviation Administration |
| FCC | Federal Communications Commission |
| G2U | Ground-to-UAV |
| LOS | Line-of-Sight |
| mMTC | Massive Machine-Type Communication |
| NLOS | Non-Line-of-Sight |
| OTA | Over the Air |
| QoS | Quality-of-Service |
| SAGIN | Space-Air-Ground Integrated Networks |
| SCSC | Satellite-Terrestrial Co-exist at Scale Communication Infrastructure |
| SINR | Singal-to-Interference Plus Noise Ratio |
| SIR | Singal-to-Interference Ratio |
| SNR | Singal-to-Noise Ratio |
| U2U | UAV-to-UAV |
| UAV | Unmanned Aerial Vehicle |
| URLLC | Ultra-Reliable and Low-Latency Communication Link |
References
- Ma, Z.; Xiao, M.; Xiao, Y.; Pang, Z.; Poor, H.V.; Vucetic, B. High-reliability and low-latency wireless communication for internet of things: Challenges, fundamentals, and enabling technologies. IEEE Internet Things J. 2019, 6, 7946–7970. [Google Scholar] [CrossRef]
- Popovski, P.; Stefanović, Č.; Nielsen, J.J.; De Carvalho, E.; Angjelichinoski, M.; Trillingsgaard, K.F.; Bana, A.S. Wireless access in ultra-reliable low-latency communication (URLLC). IEEE Trans. Commun. 2019, 67, 5783–5801. [Google Scholar] [CrossRef]
- Shirvanimoghaddam, M.; Mohammadi, M.S.; Abbas, R.; Minja, A.; Yue, C.; Matuz, B.; Han, G.; Lin, Z.; Liu, W.; Li, Y.; et al. Short block-length codes for ultra-reliable low latency communications. IEEE Commun. Mag. 2018, 57, 130–137. [Google Scholar] [CrossRef]
- Muruganathan, S.D.; Lin, X.; Määttänen, H.L.; Sedin, J.; Zou, Z.; Hapsari, W.A.; Yasukawa, S. An overview of 3GPP release-15 study on enhanced LTE support for connected drones. IEEE Commun. Stand. Mag. 2021, 5, 140–146. [Google Scholar] [CrossRef]
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-connected UAV: Potential, challenges, and promising technologies. IEEE Wirel. Commun. 2018, 26, 120–127. [Google Scholar] [CrossRef]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.L.; Bergstrom, M.; Euler, S.; Wang, Y.P.E. The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef]
- Mak, B.; Sudhanshu, A.; Ying, W.; Jonathan, A. Characterization of Low-Latency Next-Generation eVTOL Communications: From Channel Modeling to Performance Evaluation. Electronics 2023, 12, 2838. [Google Scholar] [CrossRef]
- Tran, D.H.; Nguyen, V.D.; Chatzinotas, S.; Vu, T.X.; Ottersten, B. UAV relay-assisted emergency communications in IoT networks: Resource allocation and trajectory optimization. IEEE Trans. Wirel. Commun. 2021, 21, 1621–1637. [Google Scholar] [CrossRef]
- Hosseinalipour, S.; Rahmati, A.; Dai, H. Interference avoidance position planning in dual-hop and multi-hop UAV relay networks. IEEE Trans. Wirel. Commun. 2020, 19, 7033–7048. [Google Scholar] [CrossRef]
- Wang, Y.; Gorski, A.; DaSilva, L.A. AI-Powered Real-Time Channel Awareness and 5G NR Radio Access Network Scheduling Optimization. In Proceedings of the 2021 17th International Conference on the Design of Reliable Communication Networks (DRCN), Milano, Italy, 19–22 April 2021. [Google Scholar] [CrossRef]
- Wang, Y.; Jere, S.; Banerjee, S.; Liu, L.; Modeling, V.; Dayekh, S. Anonymous Jamming Detection in 5G with Bayesian Network Model Based Inference Analysis Sachin Shetty. In Proceedings of the IEEE International Conference on High Performance Switching and Routing, Virtual, 6–8 June 2022. [Google Scholar]
- Jere, S.; Wang, Y.; Aryendu, I.; Dayekh, S.; Liu, L. Machine Learning-assisted Bayesian Inference for Jamming Detection in 5G NR. arXiv 2023, arXiv:2304.13660. [Google Scholar]
- Salehi, F.; Ozger, M.; Neda, N.; Cavdar, C. Ultra-Reliable Low-Latency Communication for Aerial Vehicles via Multi-Connectivity. In Proceedings of the 2022 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), IEEE, Grenoble, France, 7–10 June 2022; pp. 166–171. [Google Scholar]
- Ladosz, P.; Oh, H.; Chen, W.H. Optimal positioning of communication relay unmanned aerial vehicles in urban environments. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), IEEE, Arlington, VA, USA, 7–10 June 2016; pp. 1140–1147. [Google Scholar]
- Faqir, O.J.; Nie, Y.; Kerrigan, E.C.; Gündüz, D. Energy-efficient communication in mobile aerial relay-assisted networks using predictive control. IFAC-PapersOnLine 2018, 51, 197–202. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for UAV-enabled mobile relaying systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- Ono, F.; Ochiai, H.; Miura, R. A wireless relay network based on unmanned aircraft system with rate optimization. IEEE Trans. Wirel. Commun. 2016, 15, 7699–7708. [Google Scholar] [CrossRef]
- Rahmati, A.; Yapici, Y.; Rupasinghe, N.; Guvenc, I.; Dai, H.; Bhuyan, A. Energy efficiency of RSMA and NOMA in cellular-connected mmWave UAV networks. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), IEEE, Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Wang, Y.; Gorski, A.; da Silva, A. Development of a Data-Driven Mobile 5G Testbed: Platform for Experimental Research. In Proceedings of the IEEE International Mediterranean Conference on Communications and Networking, Athens, Greece, 7–10 September 2021. [Google Scholar]
- Series, P. Propagation data and prediction methods required for the design of terrestrial broadband radio access systems operating in a frequency range from 3 to 60 GHz. In Recommendation ITU-R P.1410-5; ITU Radiocommunication Sector: Geneva, Switzerland, 2013; pp. 1410–1415. [Google Scholar]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Wolfram Research, Inc. The Wolfram Functions Site; Wolfram Research, Inc.: Champaign, IL, USA, 1999. [Google Scholar]
- Thukral, A.K. Factorials of real negative and imaginary numbers-A new perspective. SpringerPlus 2014, 3, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Gallager, R.G. Information Theory and Reliable Communication; Springer: Berlin/Heidelberg, Germany, 1968; Volume 588. [Google Scholar]
- Adamchik, V.S.; Marichev, O. The algorithm for calculating integrals of hypergeometric type functions and its realization in REDUCE system. In Proceedings of the International Symposium on Symbolic and Algebraic Computation, Tokyo, Japan, 20–24 August 1990; pp. 212–224. [Google Scholar]
- Tse, D.; Viswanath, P. Fundamentals of Wireless Communication; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Scarlett, J.; Cevher, V. An introductory guide to Fano’s inequality with applications in statistical estimation. arXiv 2019, arXiv:1901.00555. [Google Scholar]
- Zhang, S.; Liew, S.C.; Chen, J. The capacity of known interference channel. IEEE J. Sel. Areas Commun. 2015, 33, 1241–1252. [Google Scholar] [CrossRef]
- Chang, H.; Wang, C.X.; Liu, Y.; Huang, J.; Sun, J.; Zhang, W.; Gao, X. A novel nonstationary 6G UAV-to-ground wireless channel model with 3-D arbitrary trajectory changes. IEEE Internet Things J. 2020, 8, 9865–9877. [Google Scholar] [CrossRef]
- Kim, M.; Lee, J. Outage probability of UAV communications in the presence of interference. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), IEEE, Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Goldsmith, A.J. The capacity of downlink fading channels with variable rate and power. IEEE Trans. Veh. Technol. 1997, 46, 569–580. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Block length of the code word | |
| Code rate | |
| Transmit power | |
| Transmit power of the ith interfering node | |
| Power of the amplifying node | |
| Reliability constraint | |
| Number of active interfering nodes at any time t | |
| channel gain between the nodes u and v | |
| Path loss exponent of the link | |
| Path loss exponent of the link between the ith interferer and the vth receiver | |
| Azimuthal (Elevation) angle of Departure for the link between the uth transmitting node and vth receiving node | |
| Azimuthal (Elevation) angle of Departure between the receiver v and the ith interfering node | |
| Azimuthal (Elevation) angle of arrival for the link between the uth transmitting node and vth receiving node | |
| Azimuthal (Elevation) angle of arrival between the receiver v and the ith interfering node | |
| 3D distance between the nodes u and v | |
| AWGN noise at the input of the receiver | |
| AWGN noise at the input of the relay node | |
| Noise spectral density | |
| Link bandwidth between the nodes u and v | |
| 3D distance between the nodes u and v | |
| B | Information bits in a codeword message of length |
| Parameter | Value |
|---|---|
| Packet size | 32 bytes |
| Rice factor of G2A link | dB |
| Rice factor of A2A link | dB |
| Noise spectral density [13] | dBm/Hz |
| LOS (NLOS) fading standard deviation | 4 dB |
| [29] | Randomly generated according to 3GPP TR 36.777 |
| [29] | Randomly generated according to 3GPP TR 36.777 |
| Model parameter [30] | 12.08 |
| Model parameter [30] | 0.11 |
| Model parameter | 0.5 |
| Carrier frequency | GHz |
| Transmit power (unless stated) | 35 dBm |
| Interferer power (unless stated) | 10 dBm |
| Reliability constraint (unless stated) | |
| Bandwidth (unless stated) [31] | 100 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arya, S.; Yang, J.; Wang, Y. Towards the Designing of Low-Latency SAGIN: Ground-to-UAV Communications over Interference Channel. Drones 2023, 7, 479. https://doi.org/10.3390/drones7070479
Arya S, Yang J, Wang Y. Towards the Designing of Low-Latency SAGIN: Ground-to-UAV Communications over Interference Channel. Drones. 2023; 7(7):479. https://doi.org/10.3390/drones7070479
Chicago/Turabian StyleArya, Sudhanshu, Jingda Yang, and Ying Wang. 2023. "Towards the Designing of Low-Latency SAGIN: Ground-to-UAV Communications over Interference Channel" Drones 7, no. 7: 479. https://doi.org/10.3390/drones7070479
APA StyleArya, S., Yang, J., & Wang, Y. (2023). Towards the Designing of Low-Latency SAGIN: Ground-to-UAV Communications over Interference Channel. Drones, 7(7), 479. https://doi.org/10.3390/drones7070479