
Towards Safe and Efficient Unmanned Aircraft System Operations: Literature Review of Digital Twins’ Applications and European Union Regulatory Compliance


Abstract
1. Introduction
2. Materials and Methods
2.1. Research Methodology
2.2. European Union Regulatory Framework
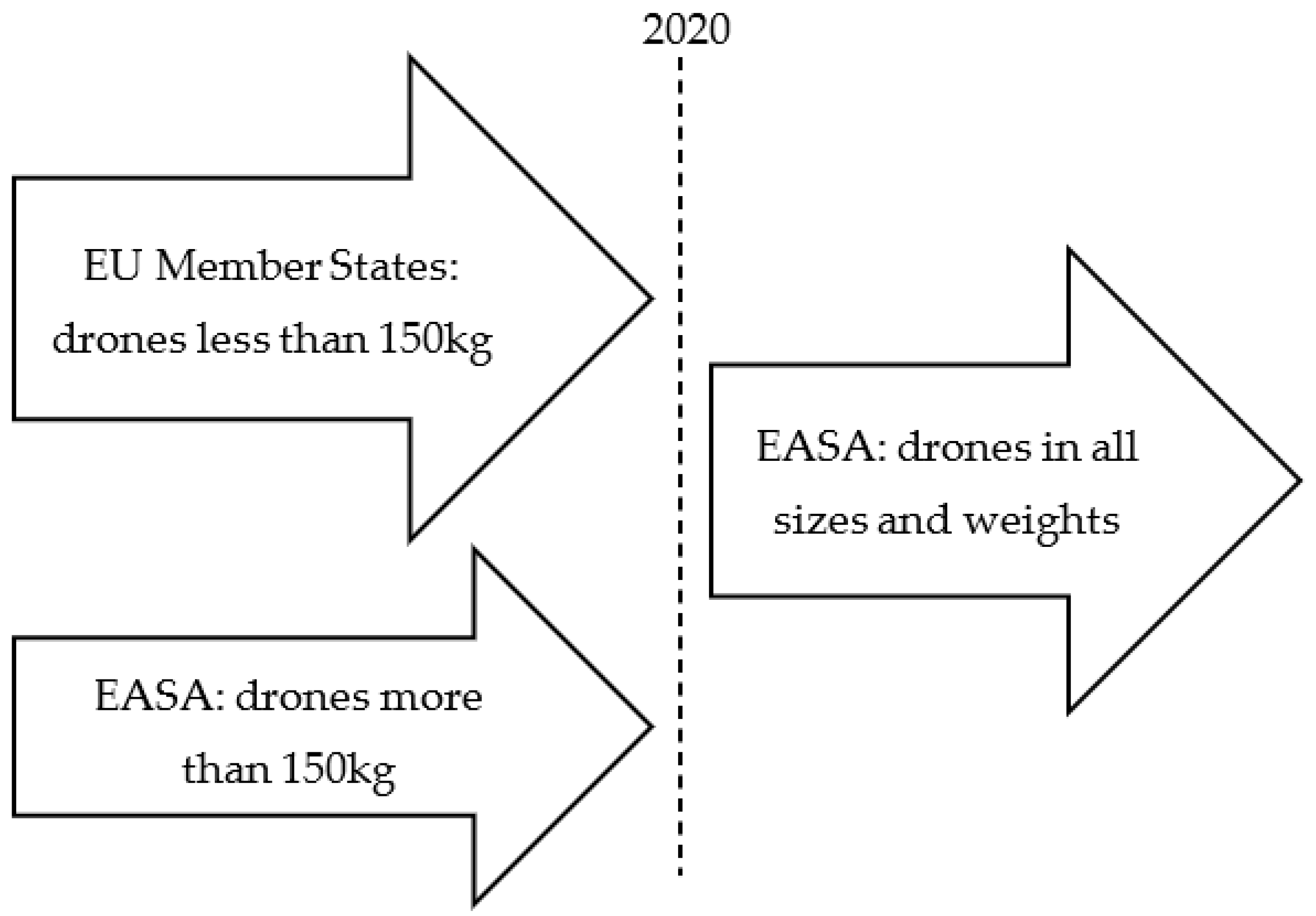
2.2.1. Access Rules for Unmanned Aircraft Systems (Regulations (EU) 2019/947 and 2019/945)
Civil Drone Operation Categories in the European Union Regulatory Framework
- The open category (low-risk): Drones in low-risk operations (e.g., leisure drone activities and low-risk commercial activities) are in the open category. This category is specified by three subcategories: A1, flying over people but not over assemblies of people; A2, flying close to people; and A3, flying far from people. Each subcategory has requirements based on UAS’s weight (the operational weight is less than 25 Kg) [98].
- The specific category (medium-risk): Operations that carry more risks and are not in the scope of the open category’s operations are in the specific category. In this category, operational authorization (issued by the competent authority of registration) is required based on the risk assessment outcome conducted under Article 11 of Regulation (EU) 2019/947, unless the operation is a standard scenario (STS): a predefined operation described in the appendix of EU Regulation 2019/947 [99].
- The certified category (high-risk): UAS high-risk operations and future drones onboard passenger flights (e.g., air taxis) are in the certified category. These UASs must always be certified, the UAS operator will need air operator approval issued by the competent authority, and the remote pilot must hold a pilot license. In the future, drone automation will reach fully autonomous UAS operations. The safety approach of these flights will be very similar to manned aviation. Almost all aviation regulations will need to be amended, and the EASA decided to conduct this major task in multiple phases [100].
- A UAS with a dimension of 3 m or more flying over assemblies of people (operation of a less than 3 m UAS flying over assemblies of people may be in the specific category unless the risk assessment outcome indicates that is in the certified category).
- Transport of people.
- Transport of dangerous goods (the payload is not in a crash-protected container) [93].
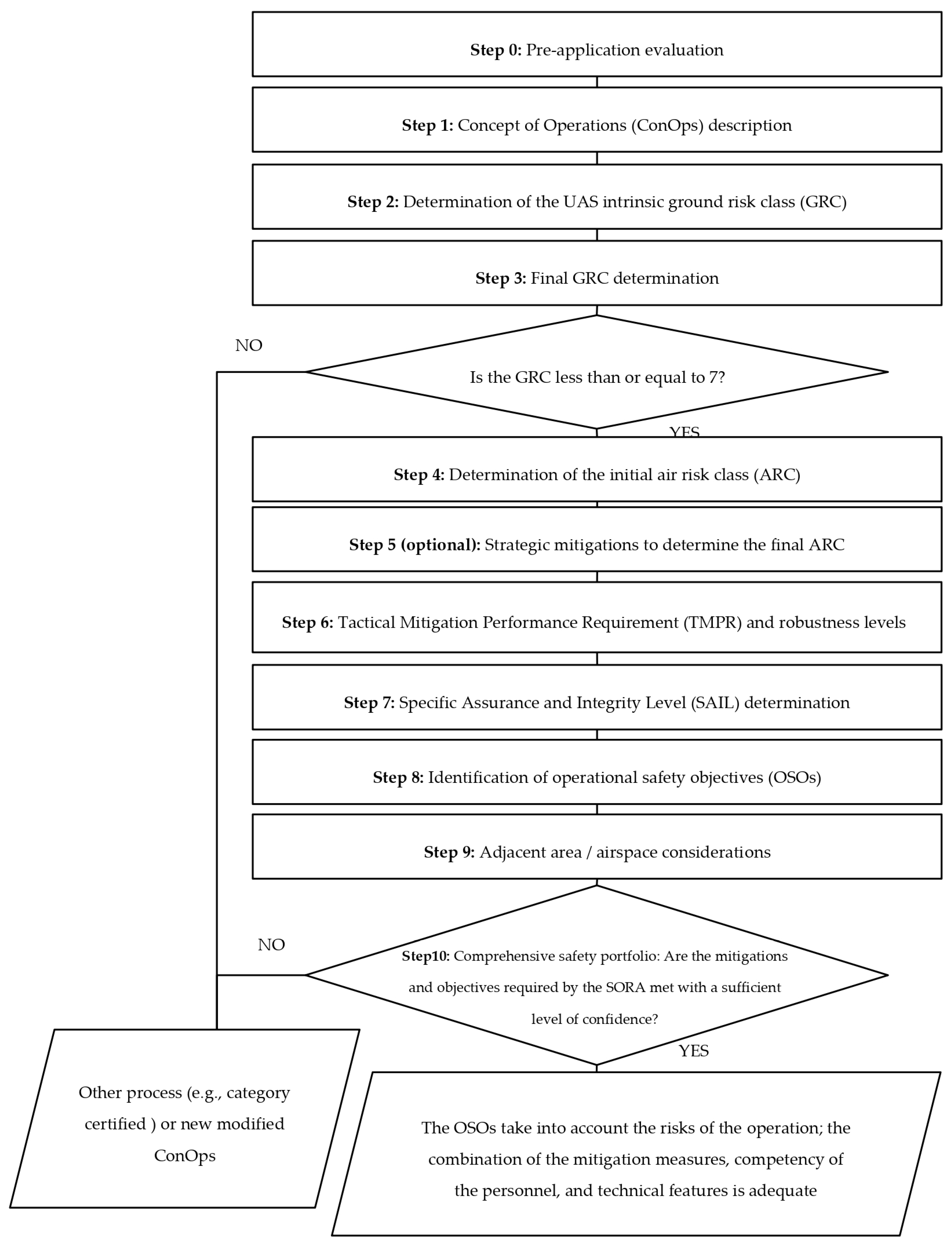
Operational Risk Assessment for Drones in Specific Category
- Standard scenario (STS): Due to the lower risks in UAS operations in STSs listed in Table 1, a declaration may be submitted.
- 2.
- Predefined risk assessment (PDRA): PDRA is considered the most common operation in Europe, and instead of conducting a full risk assessment, an authorization request may be submitted based on the PDRAs listed in Table 2. PDRAs are described in a generic way to provide flexibility, while STSs are detailed. The two types of PDRAs are PDRAs derived from STSs (a UAS operator conducts similar operations without the UAS class label mandated in STSs) and generic PDRAs. A PDRA with the letter “G” is a generic PDRA, and those with an “S” are PDRAs derived from STSs [93].
- 3.
- In high-risk operations (i.e., SAIL V and VI according to SORA), the EASA will issue a type certificate according to Part 21 (Regulation (EU) 748/2012). Easy Access Rules for Airworthiness and Environmental Certification (Regulation (EU) No. 748/2012) contains the applicable rules for the airworthiness and environmental certification of aircraft and related products, parts, and appliances, as well as for the certification of design and production organizations [102].
- In medium-risk operations (i.e., SAIL III and IV according to SORA), a design verification report will be applied [101].
2.2.2. Commission Implementing Regulation (EU) in U-Space (Regulations (EU) 2021/664, 2021/665, and 2021/666)
- Regulation (EU) 2021/664 regulates the technical and operational requirements for the U-space system [104].
- Regulation (EU) 2021/665 amends Regulation (EU) 2017/373 to establish requirements for air traffic management and air navigation service providers in the U-space designated in controlled airspace [105].
- Regulation (EU) 2021/666 modifies Regulation (EU) 923/2012 to establish the rules for the presence and requirements for manned aviation operating in U-space airspace [106].
2.2.3. EASA Artificial Intelligence Roadmap (Autonomous and Automatic UASs)
2.3. Digital Twins
- Aerospace industry: “A Digital Twin is an integrated multiphysics, multiscale, probabilistic simulation of an as-built vehicle or system that uses the best available physical models, sensor updates, fleet history, etc., to mirror the life of its corresponding flying twin. The Digital Twin is ultra-realistic and may consider one or more important and interdependent vehicle systems, including airframe, propulsion and energy storage, life support, avionics, thermal protection, etc.” [114].
- Manufacturing industry: “The Digital Twin is a set of virtual information constructs that fully describes a potential or actual physical manufactured product from the micro atomic level to the macro geometrical level. At its optimum, any information that could be obtained from inspecting a physical manufactured product can be obtained from its Digital Twin” [112].
- Construction industry: “Digital twin construction (DTC) is a new mode for managing production in construction that leverages the data streaming from a variety of site monitoring technologies and artificially intelligent functions to provide accurate status information and to proactively analyze and optimize ongoing design, planning, and production” [115].
- Service infrastructure: “a dynamic virtual representation of a physical object or system across its lifecycle, using real-time data to enable understanding, learning and reasoning” [116].
- Healthcare: “A digital twin is a digital representation of a physical asset reproducing its data model, its behavior and its communication with other physical assets. Digital twins act as a digital replica for the physical object or process they represent, providing nearly real-time monitoring and evaluation without being in close proximity” [111].
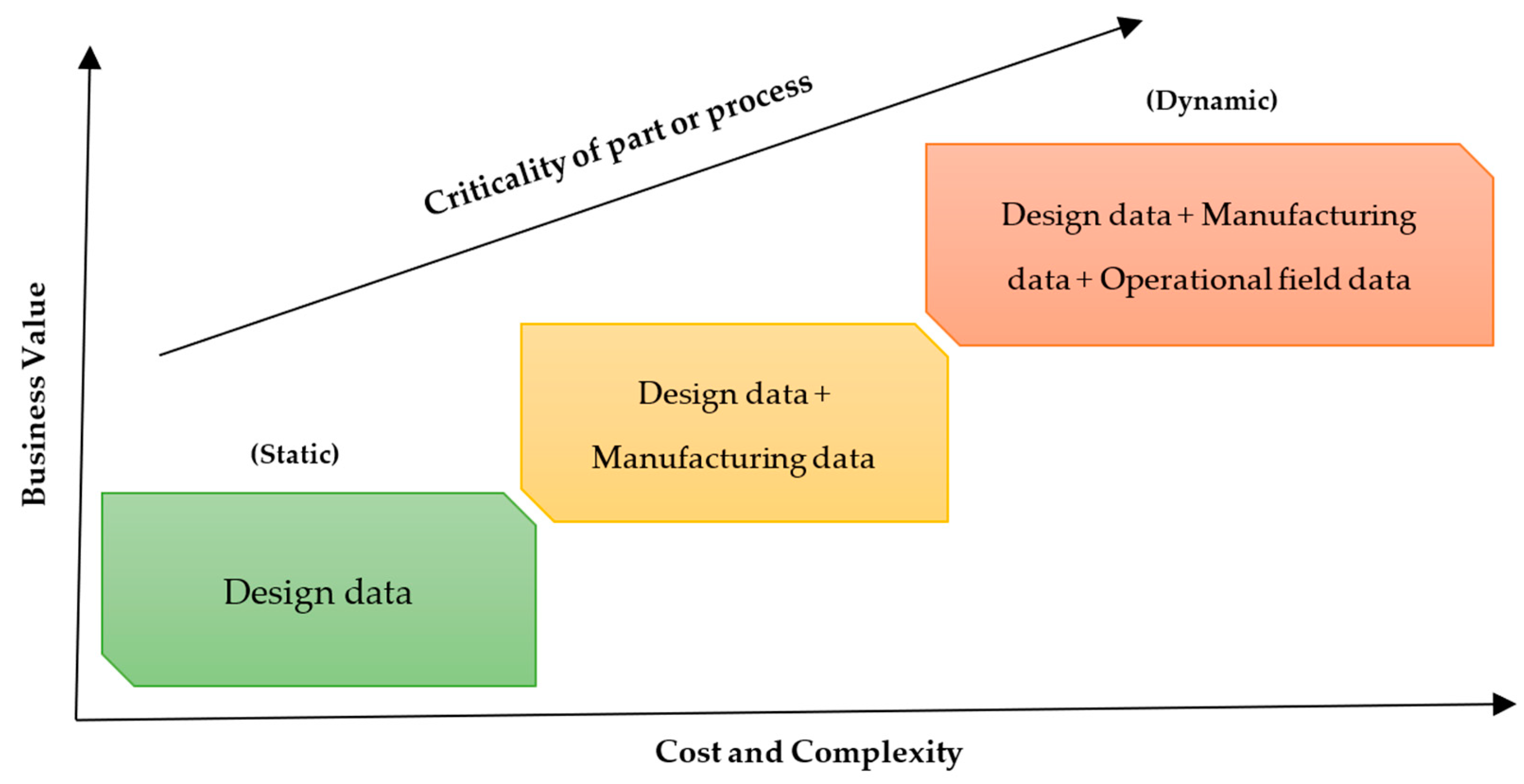
- Static DT: A static DT is developed (with the design information in a digital format) before the manufacturing process [117].
- Dynamic DT: With the help of real-time sensors mounted on a product, a dynamic digital is obtained. These sensors allow us to access real-time information. The data obtained from the physical machine by the sensors are transferred to a virtual machine. The virtual machine uses trained simulation- and data-driven models on the received data to present the needed information about the physical machine [118]. With the help of artificial intelligence and data analytics, the DT gains the potential to reach autonomous decision making [113].
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- European Union Aviation Safety Agency (EASA). ‘EASA Publishes World’s First Rules for Operation of Air Taxis in Cities’. Available online: https://www.easa.europa.eu/newsroom-and-events/press-releases/easa-publishes-worlds-first-rules-operation-air-taxis-cities (accessed on 30 June 2022).
- Liu, Z.; Cai, K.; Zhu, Y. Civil unmanned aircraft system operation in national airspace: A survey from Air Navigation Service Provider perspective. Chin. J. Aeronaut. 2021, 34, 200–224. [Google Scholar] [CrossRef]
- Lv, Z.; Chen, D.; Feng, H.; Lou, R.; Wang, H. Beyond 5G for digital twins of UAVs. Comput. Netw. 2021, 197, 108366. [Google Scholar] [CrossRef]
- ‘European Digital Twin of the Ocean (European DTO)’. Available online: https://research-and-innovation.ec.europa.eu/funding/funding-opportunities/funding-programmes-and-open-calls/horizon-europe/eu-missions-horizon-europe/restore-our-ocean-and-waters/european-digital-twin-ocean-european-dto_en (accessed on 21 April 2022).
- The NLR Digital Twins. Available online: https://www.nlr.org/capabilities/digital-twins/ (accessed on 31 January 2023).
- Eliminating Aerospace Certification Gaps Utilizing the Electrical Systems Digital Twin. Available online: https://www.plm.automation.siemens.com/global/en/webinar/aerospace-certification/97877 (accessed on 28 January 2022).
- ELISE-Digital Twin. Available online: https://joinup.ec.europa.eu/collection/elise-european-location-interoperability-solutions-e-government/glossary/term/digital-twin#:~:text=Digital%20twins%20create%20a%20virtual,(2020)%2C%20European%20Data%20Strategy (accessed on 1 January 2022).
- Barricelli, B.R.; Casiraghi, E.; Fogli, D. A Survey on Digital Twin: Definitions, Characteristics, Applications, and Design Implications. IEEE Access 2019, 7, 167653–167671. [Google Scholar] [CrossRef]
- David, J.; Lobov, A.; Lanz, M. Learning Experiences Involving Digital Twins. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018. [Google Scholar]
- Leng, J.; Wang, D.; Shen, W.; Li, X.; Liu, Q.; Chen, X. Digital twins-based smart manufacturing system design in Industry 4.0: A review. J. Manuf. Syst. 2021, 60, 119–137. [Google Scholar] [CrossRef]
- Wu, J.; Yang, Y.; Cheng, X.U.N.; Zuo, H.; Cheng, Z. The Development of Digital Twin Technology Review. In Proceedings of the 2020 Chinese Automation Congress, CAC 2020, Shanghai, China, 6–8 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 4901–4906. [Google Scholar] [CrossRef]
- Johnson, W.; Silva, C. NASA concept vehicles and the engineering of advanced air mobility aircraft. Aeronaut. J. 2022, 126, 59–91. [Google Scholar] [CrossRef]
- Goyal, R.; Cohen, A. Advanced Air Mobility: Opportunities and Challenges Deploying eVTOLs for Air Ambulance Service. Appl. Sci. 2022, 12, 1183. [Google Scholar] [CrossRef]
- Al-Rubaye, S.; Tsourdos, A.; Namuduri, K. Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones 2023, 7, 319. [Google Scholar] [CrossRef]
- de Oliveira, Í.R.; Neto, E.C.P.; Matsumoto, T.T.; Yu, H. Decentralized air traffic management for advanced air mobility. In Proceedings of the Integrated Communications, Navigation and Surveillance Conference, ICNS, Dulles, VA, USA, 20–22 April 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Wing, D.J.; Chancey, E.T.; Politowicz, M.S.; Ballin, M.G. Achieving resilient in-flight performance for advanced air mobility through simplified vehicle operations. In Proceedings of the AIAA AVIATION 2020 FORUM, Reno, NV, USA, 15–19 June 2020; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 2020. [Google Scholar] [CrossRef]
- Garrow, L.A.; German, B.; Schwab, N.T.; Patterson, M.D.; Mendonca, N.; Gawdiak, Y.O.; Murphy, J.R. A Proposed Taxonomy for Advanced Air Mobility. In Proceedings of the AIAA AVIATION 2022 Forum, Reston, VA, USA, 29 June 2022. [Google Scholar] [CrossRef]
- Chancey, E.T.; Politowicz, M.S.; Le Vie, L. Enabling Advanced Air Mobility Operations through Appropriate Trust in Human-Autonomy Teaming: Foundational Research Approaches and Applications. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 19–21 January 2021. [Google Scholar] [CrossRef]
- Ellis, K.K.; Krois, P.; Koelling, J.; Prinzel, L.J.; Davies, M.; Mah, R. A Concept of Operations (ConOps) of an In-time Aviation Safety Management System (IASMS) for Advanced Air Mobility (AAM). In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 19–21 January 2021. [Google Scholar] [CrossRef]
- Mendonca, N.; Murphy, J.; Patterson, M.D.; Alexander, R.; Juarex, G.; Harper, C. Advanced Air Mobility Vertiport Considerations: A List and Overview. In Proceedings of the AIAA AVIATION 2022 Forum, Reston, VA, USA, 29 June 2022; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2022. [Google Scholar] [CrossRef]
- Pascioni, K.A.; Watts, M.E.; Houston, M.; Lind, A.; Stephenson, J.H.; Bain, J. Acoustic Flight Test of the Joby Aviation Advanced Air Mobility Prototype Vehicle. In Proceedings of the 28th AIAA/CEAS Aeroacoustics 2022 Conference, Reston, VA, USA, 14–17 June 2022; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2022. [Google Scholar] [CrossRef]
- Alvarez, L.E.; Jones, J.C.; Bryan, A.; Weinert, A.J. Demand and Capacity Modeling for Advanced Air Mobility. In Proceedings of the AIAA AVIATION 2021 FORUM, Reston, VA, USA, 2–6 August 2021; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar] [CrossRef]
- Kannan, K.; Baculi, J.E.; Lombaerts, T.; Kawamura, E.; Gorospe, G.E.; Holforty, W.; Ippolito, C.A.; Stepanyan, V.; Dolph, C.; Brown, N. A Simulation Architecture for Air Traffic Over Urban Environments Supporting Autonomy Research in Advanced Air Mobility. In Proceedings of the AIAA SCITECH 2023 Forum, Reston, VA, USA, 25 January 2023; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2023. [Google Scholar] [CrossRef]
- Kawamura, E.; Dolph, C.; Kannan, K.; Lombaerts, T.; Ippolito, C.A. Simulated Vision-based Approach and Landing System for Advanced Air Mobility. In Proceedings of the AIAA SCITECH 2023 Forum, Reston, VA, USA, 25 January 2023; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2023. [Google Scholar] [CrossRef]
- Van Dalsem, W.; Shetye, S.; Das, A.N.; Krishnakumar, K.S.; Lozito, S.; Freeman, K.; Swank, A.; Shannon, P.; Tomljenovic, L. A Data & Reasoning Fabric to Enable Advanced Air Mobility. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 19–21 January 2021; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar] [CrossRef]
- Kawamura, E.; Kannan, K.; Lombaerts, T.; Ippolito, C.A. Vision-Based Precision Approach and Landing for Advanced Air Mobility. In Proceedings of the AIAA SCITECH 2022 Forum, Reston, VA, USA, 3–7 January 2022; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2022. [Google Scholar] [CrossRef]
- Lombaerts, T.; Kannan, K.; Kawamura, E.; Dolph, C.; Stepanyan, V.; Gorospe, G.E.; Ippolito, C.A. Distributed Ground Sensor Fusion Based Object Tracking for Autonomous Advanced Air Mobility Operations. In Proceedings of the AIAA SCITECH 2023 Forum, Reston, VA, USA, 25 January 2023; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2023. [Google Scholar] [CrossRef]
- Chen, S.; Wei, P.; Evans, A.D.; Egorov, M. Estimating Airspace Resource Capacity for Advanced Air Mobility Operations. In Proceedings of the AIAA AVIATION 2022 Forum, Reston, VA, USA, 29 June 2022; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2022. [Google Scholar] [CrossRef]
- Dulia, E.F.; Sabuj, M.S.; Shihab, S.A.M. Benefits of advanced air mobility for society and environment: A case study of Ohio. Appl. Sci. 2022, 12, 207. [Google Scholar] [CrossRef]
- Goyal, R.; Reiche, C.; Fernando, C.; Cohen, A. Advanced air mobility: Demand analysis and market potential of the airport shuttle and air taxi markets. Sustainability 2021, 13, 7421. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency (EASA). ‘Urban Air Mobility’. Available online: https://www.easa.europa.eu/en/what-is-uam (accessed on 5 July 2023).
- Garrow, L.A.; German, B.J.; Leonard, C.E. Urban air mobility: A comprehensive review and comparative analysis with autonomous and electric ground transportation for informing future research. Transp Res. Part C Emerg Technol. 2021, 132, 103377. [Google Scholar] [CrossRef]
- Rothfeld, R.; Straubinger, A.; Fu, M.; Al Haddad, C.; Antoniou, C. Chapter13—Urban air mobility. In Demand for Emerging Transportation Systems; Elsevier: Amsterdam, The Netherlands, 2020; pp. 267–284. [Google Scholar] [CrossRef]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility—Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Winkler, S.; Zeadally, S.; Evans, K. Privacy and civilian drone use: The need for further regulation. IEEE Secur. Priv. 2018, 16, 72–80. [Google Scholar] [CrossRef]
- Clarke, R. The regulation of civilian drones’ impacts on behavioural privacy. Comput. Law Secur. Rev. 2014, 30, 286–305. [Google Scholar] [CrossRef]
- Clarke, R.; Moses, L.B. The regulation of civilian drones’ impacts on public safety. Comput. Law Secur. Rev. 2014, 30, 263–285. [Google Scholar] [CrossRef]
- Thomasen, K. Robots, Regulation, and the Changing Nature of Public Space. Ott. Law Rev. 2020, 51, 275–312. [Google Scholar]
- Thomasen, K. Beyond Airspace Safety: A Feminist Perspective on Drone Privacy Regulation. Can. J. Law Technol. 2016, 16. [Google Scholar] [CrossRef]
- Merkert, R.; Beck, M.J.; Bushell, J. Will It Fly? Adoption of the road pricing framework to manage drone use of airspace. Transp. Res. Part A Policy Pract. 2021, 150, 156–170. [Google Scholar] [CrossRef]
- West, J.P.; Klofstad, C.A.; Uscinski, J.E.; Connolly, J.M. Citizen support for domestic drone use and regulation. Am. Politics Res. 2019, 47, 119–151. [Google Scholar] [CrossRef]
- Li, X.; Kim, J.H. Managing disruptive technologies: Exploring the patterns of local drone policy adoption in California. Cities 2022, 126, 103736. [Google Scholar] [CrossRef]
- Nelson, J.; Gorichanaz, T. Trust as an ethical value in emerging technology governance: The case of drone regulation. Technol. Soc. 2019, 59, 101131. [Google Scholar] [CrossRef]
- Meyer, H.; Zimdahl, J.; Kamtsiuris, A.; Meissner, R.; Raddatz, F.; Haufe, S.; Bäßler, M. Development of a Digital Twin for Aviation Research; DGLR: Bonn, Germany, 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Liu, Z.; Meyendorf, N.; Mrad, N. The role of data fusion in predictive maintenance using digital twin. In AIP Conference Proceedings; American Institute of Physics Inc.: College Park, MD, USA, 2018. [Google Scholar] [CrossRef]
- Liao, M.; Renaud, G.; Bombardier, Y. Airframe digital twin technology adaptability assessment and technology demonstration. Eng. Fract. Mech. 2020, 22, 106793. [Google Scholar] [CrossRef]
- Aydemir, H.; Zengin, U.; Durak, U.; Hartmann, S. The digital twin paradigm for aircraft—Review and outlook. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Mendi, A.F.; Erol, T.; Dogan, D. Digital Twin in the Military Field. IEEE Internet Comput. 2022, 26, 33–40. [Google Scholar] [CrossRef]
- Ibrion, M.; Paltrinieri, N.; Nejad, A.R. On Risk of Digital Twin Implementation in Marine Industry. In Journal of Physics: Conference Series; Institute of Physics Publishing: Bristol, UK, 2019. [Google Scholar] [CrossRef]
- Tuegel, E.J. The airframe digital twin: Some challenges to realization. In Collection of Technical Papers—AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 2012. [Google Scholar] [CrossRef]
- Seshadri, B.R.; Krishnamurthy, T. Structural health management of damaged aircraft structures using the digital twin concept. In Proceedings of the 25th AIAA/AHS Adaptive Structures Conference, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 2017. [Google Scholar] [CrossRef]
- Mandolla, C.; Petruzzelli, A.M.; Percoco, G.; Urbinati, A. Building a digital twin for additive manufacturing through the exploitation of blockchain: A case analysis of the aircraft industry. Comput. Ind. 2019, 109, 134–152. [Google Scholar] [CrossRef]
- Zhang, Q.; Zheng, S.; Yu, C.; Wang, Q.; Ke, Y. Digital thread-based modeling of digital twin framework for the aircraft assembly system. J. Manuf. Syst. 2022, 65, 406–420. [Google Scholar] [CrossRef]
- Tyncherov, T.; Rozkova, L. Aircraft Lifecycle Digital Twin for Defects Prediction Accuracy Improvement. In Proceedings of the 19th International Conference on Reliability and Statistics in Transportation and Communication, Riga, Latvia, 16–19 October 2020; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 54–63. [Google Scholar] [CrossRef]
- Tuegel, E.J.; Ingraffea, A.R.; Eason, T.G.; Spottswood, S.M. Reengineering Aircraft Structural Life Prediction Using a Digital Twin. Int. J. Aerosp. Eng. 2011, 2011, 154798. [Google Scholar] [CrossRef]
- Ríos, J.; Hernández, J.C.; Oliva, M.; Mas, F. Product avatar as digital counterpart of a physical individual product: Literature review and implications in an aircraft. In Transdisciplinary Lifecycle Analysis of Systems; IOS Press: Amsterdam, The Netherlands, 2015; pp. 657–666. [Google Scholar] [CrossRef]
- Strelets, D.Y.; Serebryansky, S.A.; Shkurin, M.V. Concept of Creation of a Digital Twin in the Uniform Information Environment of Product Life Cycle. In Proceedings of the 13th International Conference Management of Large-Scale System Development (MLSD), Moscow, Russia, 28–30 September 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Liang, B.; Liu, W.; Liu, K.; Zhou, M.; Zhang, Y.; Jia, Z. A displacement field perception method for component digital twin in aircraft assembly. Sensors 2020, 20, 5161. [Google Scholar] [CrossRef]
- Zhang, Z.; Guan, Z.; Gong, Y.; Luo, D.; Yue, L. Improved multi-fidelity simulation-based optimisation: Application in a digital twin shop floor. Int. J. Prod. Res. 2022, 60, 1016–1035. [Google Scholar] [CrossRef]
- Singh, S.; Shehab, E.; Higgins, N.; Fowler, K.; Erkoyuncu, J.A.; Gadd, P. Towards Information Management Framework for Digital Twin in Aircraft Manufacturing. Procedia CIRP 2021, 96, 163–168. [Google Scholar] [CrossRef]
- Lei, D.; Rong, K.; Song, B.; Ding, H.; Tang, J. Digital twin modeling for tooth surface grinding considering low-risk transmission performance of non-orthogonal aviation spiral bevel gears. ISA Trans. 2022, 128, 646–663. [Google Scholar] [CrossRef]
- Zakrajsek, A.J.; Mall, S. The development and use of a digital twin model for tire touchdown health monitoring. In Proceedings of the 58th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 2017. [Google Scholar] [CrossRef]
- Xu, Z.; Ji, F.; Ding, S.; Zhao, Y.; Zhou, Y.; Zhang, Q.; Du, F. Digital twin-driven optimization of gas exchange system of 2-stroke heavy fuel aircraft engine. J. Manuf. Syst. 2021, 58, 132–145. [Google Scholar] [CrossRef]
- Borgo, M.D.; Elliott, S.J.; Tehrani, M.G.; Stothers, I.M. Virtual Sensing of Wheel Position in Ground-Steering Systems for Aircraft Using Digital Twins. In Model Validation and Uncertainty Quantification, Volume 3, Proceedings of the 38th IMAC, A Conference and Exposition on Structural Dynamics 2020, Houston, TX, USA, 10–13 February 2020; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 107–118. [Google Scholar] [CrossRef]
- Hu, F. Digital Twin-Driven Reconfigurable Fixturing Optimization for Trimming Operation of Aircraft Skins. Aerospace 2022, 9, 154. [Google Scholar] [CrossRef]
- Peng, C.C.; Chen, Y.H. Digital Twins-Based Online Monitoring of TFE-731 Turbofan Engine Using Fast Orthogonal Search. IEEE Syst. J. 2022, 16, 3060–3071. [Google Scholar] [CrossRef]
- Li, C.; Mahadeven, S.; Ling, Y.; Wang, L.; Choze, S. A dynamic Bayesian network approach for digital twin. In Proceedings of the 19th AIAA Non-Deterministic Approaches Conference, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 2017. [Google Scholar] [CrossRef]
- Li, C.; MahaDeVan, S.; Ling, Y.; Choze, S.; Wang, L. Dynamic Bayesian network for aircraft wing health monitoring digital twin. AIAA J. 2017, 55, 930–941. [Google Scholar] [CrossRef]
- Kosova, F.; Unver, H.O. A digital twin framework for aircraft hydraulic systems failure detection using machine learning techniques. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2022, 237, 1563–1580. [Google Scholar] [CrossRef]
- Laukotka, F.; Hanna, M.; Krause, D. Digital twins of product families in aviation based on an MBSE-assisted approach. Procedia CIRP 2021, 100, 684–689. [Google Scholar] [CrossRef]
- Xiong, M.; Wang, H. Digital twin applications in aviation industry: A review. Int. J. Adv. Manuf. Technol. 2022, 121, 5677–5692. [Google Scholar] [CrossRef]
- Lv, Z.; Xie, S. Artificial intelligence in the digital twins: State of the art, challenges, and future research topics. Digit. Twin 2022, 1, 12. [Google Scholar] [CrossRef]
- Salinger, S.J.; Kapteyn, M.G.; Kays, C.; Pretorius, J.V.R.; Willcox, K.E. A Hardware Testbed for Dynamic Data-Driven Aerospace Digital Twins. In Proceedings of the Dynamic Data Driven Applications Systems: Third International Conference, DDDAS 2020, Boston, MA, USA, 2–4 October 2020; pp. 37–45. [Google Scholar] [CrossRef]
- Kapteyn, M.G.; Knezevic, D.J.; Huynh, D.B.P.; Tran, M.; Willcox, K.E. Data-driven physics-based digital twins via a library of component-based reduced-order models. Int. J. Numer. Methods Eng. 2022, 123, 2986–3003. [Google Scholar] [CrossRef]
- Kapteyn, M.G.; Knezevic, D.J.; Willcox, K.E. Toward predictive digital twins via component-based reduced-order models and interpretable machine learning. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; American Institute of Aeronautics and Astronautics Inc.: Reston, VA, USA, 2020. [Google Scholar] [CrossRef]
- Aláez, D.; Olaz, X.; Prieto, M.; Villadangos, J.; Astrain, J.J. VTOL UAV digital twin for take-off, hovering and landing in different wind conditions. Simul. Model Pract. Theory 2022, 123, 102703. [Google Scholar] [CrossRef]
- Yang, Y.; Meng, W.; Li, H.; Lu, R.; Fu, M. A Digital Twin Platform for Multi-Rotor UAV. In Proceedings of the Chinese Control Conference, CCC, Shanghai, China, 26–28 July 2021; IEEE Computer Society: Piscataway, NJ, USA, 2021; pp. 7909–7913. [Google Scholar] [CrossRef]
- Yang, Y.; Meng, W.; Zhu, S. A Digital Twin Simulation Platform for Multi-rotor UAV. In Proceedings of the 2020 7th International Conference on Information, Cybernetics, and Computational Social Systems, ICCSS 2020, Guangzhou, China, 13–15 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 591–596. [Google Scholar] [CrossRef]
- Moorthy, S.K.; Harindranath, A.; McManus, M.; Guan, Z.; Mastronarde, N.; Bentley, E.S.; Medley, M. A Middleware for Digital Twin-Enabled Flying Network Simulations Using UBSim and UB-ANC. In Proceedings of the 18th Annual International Conference on Distributed Computing in Sensor Systems (DCOSS), Los Angeles, CA, USA, 30 May–1 June 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 322–327. [Google Scholar] [CrossRef]
- Wu, J.; Guo, J.; Lv, Z. Deep Learning Driven Security in Digital Twins of Drone Network. In Proceedings of the IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Shen, G.; Lei, L.; Li, Z.; Cai, S.; Zhang, L.; Cao, P.; Liu, X. Deep Reinforcement Learning for Flocking Motion of Multi-UAV Systems: Learn from a Digital Twin. IEEE Internet Things J. 2022, 9, 11141–11153. [Google Scholar] [CrossRef]
- Lv, Z.; Chen, D.; Feng, H.; Zhu, H.; Lv, H. Digital Twins in Unmanned Aerial Vehicles for Rapid Medical Resource Delivery in Epidemics. In IEEE Transactions on Intelligent Transportation Systems; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Fraser, B.; Al-Rubaye, S.; Aslam, S.; Tsourdos, A. Enhancing the Security of Unmanned Aerial Systems using Digital-Twin Technology and Intrusion Detection. In Proceedings of the AIAA/IEEE Digital Avionics Systems Conference-Proceedings, San Antonio, TX, USA, 3–7 October 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Kapteyn, M.G.; Pretorius, J.V.R.; Willcox, K.E. A probabilistic graphical model foundation for enabling predictive digital twins at scale. Nat. Comput. Sci. 2021, 1, 337–347. [Google Scholar] [CrossRef]
- Riordan, J.; Manduhu, M.; Black, J.; Dow, A.; Dooly, G.; Matalonga, S. LiDAR Simulation for Performance Evaluation of UAS Detect and Avoid. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 1355–1363. [Google Scholar] [CrossRef]
- Iqbal, D.; Buhnova, B. Model-based Approach for Building Trust in Autonomous Drones through Digital Twins. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 656–662. [Google Scholar] [CrossRef]
- Grigoropoulos, N.; Lalis, S. Simulation and Digital Twin Support for Managed Drone Applications. In Proceedings of the IEEE/ACM 24th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Prague, Czech Republic, 14–16 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Lee, E.B.K.; Van Bossuyt, D.L.; Bickford, J.F. Digital twin-enabled decision support in mission engineering and route planning. Systems 2021, 9, 82. [Google Scholar] [CrossRef]
- Lei, L.; Shen, G.; Zhang, L.; Li, Z. Toward Intelligent Cooperation of UAV Swarms: When Machine Learning Meets Digital Twin. IEEE Netw. 2021, 35, 386–392. [Google Scholar] [CrossRef]
- Wang, W.; Li, X.; Xie, L.; Lv, H.; Lv, Z. Unmanned Aircraft System Airspace Structure and Safety Measures Based on Spatial Digital Twins. IEEE Trans. Intell. Transp. Syst. 2022, 23, 2809–2818. [Google Scholar] [CrossRef]
- de Miguel Molina, M. Ethics and Civil Drones: European Policies and Proposals for the Industry; Springer Briefs in Law: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Megson, T.H.G. Aircraft Structures for Engineering Students, 5th ed.; No. 1.; Butterworth-Heinemann: Oxford, UK, 2012. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency (EASA). ‘Easy Access Rules for Unmanned Aircraft Systems (Regulation (EU) 2019/947 and Regulation (EU) 2019/945)’. Available online: https://www.easa.europa.eu/document-library/easy-access-rules/easy-access-rules-unmanned-aircraft-systems-regulation-eu (accessed on 28 September 2022).
- Boschert, S.; Heinrich, C.; Rosen, R. Next generation digital twin. In Proceedings of TMCE; CFP: Palmas de Gran Canaria, Spain, 2018; pp. 209–218. [Google Scholar]
- Custers, B. The Future of Drone Use Opportunities and Threats from Ethical and Legal Perspectives; TMC Asser Press Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- European Union Aviation Safety Agency (EASA). ‘EASA Provisions: The Applicability Dates under EU Regulation 2019/947 and 2019/945’. Available online: https://www.easa.europa.eu/the-agency/faqs/drones-uas (accessed on 1 February 2023).
- European Union Aviation Safety Agency (EASA). ‘Civil Drones (Unmanned Aircraft)’. Available online: https://www.easa.europa.eu/domains/civil-drones (accessed on 1 February 2023).
- European Union Aviation Safety Agency (EASA). ‘Open Category of Civil Drones’. Available online: https://www.easa.europa.eu/domains/civil-drones/drones-regulatory-framework-background/open-category-civil-drones (accessed on 1 February 2023).
- European Union Aviation Safety Agency (EASA). ‘Specific Category of Civil Drones’. Available online: https://www.easa.europa.eu/domains/civil-drones/drones-regulatory-framework-background/specific-category-civil-drones (accessed on 1 February 2023).
- European Union Aviation Safety Agency (EASA). ‘Certified Category of Civil Drones’. Available online: https://www.easa.europa.eu/domains/civil-drones/drones-regulatory-framework-background/certified-category-civil-drones (accessed on 1 February 2023).
- European Union Aviation Safety Agency (EASA). ‘EASA Issues Guidelines for the Design Verification of Drones Operated in the Specific Category’. Available online: https://www.easa.europa.eu/newsroom-and-events/press-releases/easa-issues-guidelines-design-verification-drones-operated (accessed on 8 April 2021).
- European Union Aviation Safety Agency (EASA). ‘Easy Access Rules for Airworthiness and Environmental Certification (Regulation (EU) No 748/2012)’. Available online: https://www.easa.europa.eu/document-library/general-publications/easy-access-rules-initial-airworthiness (accessed on 31 March 2023).
- Elisabeth Landrichter, The New EU Regulatory Framework for U-Space. European Civil Aviation Conference Bulletin on Unmanned Aircraft Systems. Available online: https://www.ecac-ceac.org/activities/unmanned-aircraft-systems/uas-bulletin/22-uas-bulletin/505-uas-bulletin-2-the-new-eu-regulatory-framework-for-u-space (accessed on 1 December 2021).
- European Union Aviation Safety Agency (EASA). ‘Commission Implementing Regulation (EU) 2021/664’. Available online: https://www.easa.europa.eu/en/document-library/regulations/commission-implementing-regulation-eu-2021664 (accessed on 29 April 2021).
- European Union Aviation Safety Agency (EASA). ‘Commission Implementing Regulation (EU) 2021/665’. Available online: https://www.easa.europa.eu/en/document-library/regulations/commission-implementing-regulation-eu-2021665-0 (accessed on 29 April 2021).
- European Union Aviation Safety Agency (EASA). ‘Commission Implementing Regulation (EU) 2021/666’. Available online: https://www.easa.europa.eu/en/document-library/regulations/commission-implementing-regulation-eu-2021666 (accessed on 29 April 2021).
- European Union Aviation Safety Agency (EASA). ‘The Difference between Autonomous and Automatic Drones’. Available online: https://www.easa.europa.eu/the-agency/faqs/regulations-uas-drone-explained (accessed on 2 February 2023).
- Torens, C.; Jünger, F.; Schirmer, S.; Schopferer, S.; Maienschein, T.; Dauer, J.C. Machine Learning Verification and Safety for Unmanned Aircraft-A Literature Study. In Proceedings of the AIAA Scitech 2022 Forum, Reston, VA, USA, 3–7 January 2022. [Google Scholar]
- European Union Aviation Safety Agency (EASA). ‘EASA Artificial Intelligence Roadmap—A Human Centric Approach to AI in Aviation’. Available online: https://www.easa.europa.eu/newsroom-and-events/news/easa-artificial-intelligence-roadmap-10-published (accessed on 7 February 2020).
- Torens, C.; Durak, U.; Dauer, J.C. Guidelines and Regulatory Framework for Machine Learning in Aviation. In Proceedings of the AIAA Scitech Forum, Reston, VA, USA, 3–7 January 2022. [Google Scholar]
- Croatti, A.; Gabellini, M.; Montagna, S.; Ricci, A. On the Integration of Agents and Digital Twins in Healthcare. J. Med. Syst. 2020, 44, 161. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. In Transdisciplinary Perspectives on Complex Systems—New Findings and Approaches; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 85–113. [Google Scholar] [CrossRef]
- Feng, H.; Chen, Q.; de Soto, B.G. Application of digital twin technologies in construction: An overview of opportunities and challenges. In Proceedings of the 38th International Symposium on Automation and Robotics in Construction (ISARC), Dubai, United Arab Emirates, 2 November 2021; pp. 979–986. [Google Scholar] [CrossRef]
- Glaessgen, E.H.; Stargel, D.S. The Digital Twin Paradigm for Future NASA and US. In Air Force Vehicles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 26 April 2012. [Google Scholar] [CrossRef]
- Sacks, R.; Brilakis, I.; Pikas, E.; Xie, H.S.; Girolami, M. Construction with digital twin information systems. Data-Centric Eng. 2020, 1, e14. [Google Scholar] [CrossRef]
- Bolton, R.N.; McColl-Kennedy, J.R.; Cheung, L.; Gallan, A.; Orsingher, C.; Witell, L.; Zaki, M. Customer experience challenges: Bringing together digital, physical and social realms. J. Serv. Manag. 2018, 29, 776–808. [Google Scholar] [CrossRef]
- Krishnan, M.S. Digital Twins. Available online: https://www.coursera.org/learn/digital-twins (accessed on 30 November 2022).
- Pal, S.K.; Mishra, D.; Pal, A.; Dutta, S.; Chakravarty, D.; Pal, S. Digital Twin—Fundamental Concepts to Applications in Advanced Manufacturing; The Springer Series in Advanced Manufacturing; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Semanjski, I. Smart Urban Mobility, Transport Planning in the Age of Big Data and Digital Twins; Elsevier: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Semeraro, C.; Lezoche, M.; Panetto, H.; Dassisti, M. Digital twin paradigm: A systematic literature review. Comput. Ind. 2021, 130, 103469. [Google Scholar] [CrossRef]
- AURORA Consortium, ‘AURORA H2020 Project’. Available online: https://aurora-uam.eu/ (accessed on 28 February 2023).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| STS# | Edition/ Date | UAS Characteristics | BVLOS/VLOS 2 | Overflown Area | Maximum Range from Remote Pilot | Maximum Height | Airspace |
|---|---|---|---|---|---|---|---|
| STS-01 | June 2020 | Bearing a C5 class marking (maximum characteristic dimensions of up to 3 m and MTOM 1 of up to 25 kg) | VLOS | Controlled ground area that might be located in a populated area | VLOS | 120 m | Controlled or uncontrolled, with a low risk of encounter with manned aircraft |
| STS-02 | June 2020 | Bearing a C6 class marking (maximum characteristic dimensions of up to 3 m and MTOM of up to 25 kg) | BVLOS | Controlled ground area that is entirely located in a sparsely populated area | 2 km with an AO 3 1 km, if no AO | 120 m | Controlled or uncontrolled, with a low risk of encounter with manned aircraft |
| PDRA# | Edition/ Date | UAS Characteristics | BVLOS/VLOS | Overflown Area | Maximum Range from Remote Pilot | Maximum Height | Airspace | AMC# 1 Article 11 |
|---|---|---|---|---|---|---|---|---|
| PDRA-S01 | 1.0/July 2020 | Maximum characteristic dimension of up to 3 m and MTOM of up to 25 kg | VLOS | Controlled ground area that might be located in a populated area | VLOS | 120 m | Controlled or uncontrolled, with a low risk of an encounter with manned aircraft | AMC4 |
| PDRA-S02 | 1.0/July 2020 | Maximum characteristic dimension of up to 3 m and MTOM of up to 25 kg | BVLOS | Controlled ground area that is entirely located in a sparsely populated area | 2 km with an AO, 1 km if no AO | 120 m | Controlled or uncontrolled, with a low risk of an encounter with manned aircraft | AMC5 |
| PDRA-G01 | 1.1/July 2020 | Maximum characteristic dimension of up to 3 m and typical kinetic energy of up to 34 kJ | BVLOS | Sparsely populated area | If no AO, up to 1 km | 150 m (operational volume) | Uncontrolled, with a low risk of an encounter with manned aircraft | AMC2 |
| PDRA-G02 | 1.0/July 2020 | Maximum characteristic dimension of up to 3 m and typical kinetic energy of up to 34 kJ | BVLOS | Sparsely populated area | N/a | As established for the reserved airspace | As reserved for the operation | AMC3 |
| Research Question | Answers |
|---|---|
| “What is a Digital Twin?” Definition | “A set of adaptive models that emulate the behaviour of a physical system in a virtual system getting real time data to update itself along its life cycle. The digital twin replicates the physical system to predict failures and opportunities for changing, to prescribe real time actions for optimizing and/or mitigating unexpected events observing and evaluating the operating profile system” |
| “Where is appropriate to use a Digital Twin?” Contexts and use cases | 1. Healthcare Improving operational efficiency of healthcare operations 2. Maritime and Shipping Design customization 3.Manufacturing Product development and predictive manufacturing 4. City Management Modeling and simulation of smart cities 5. Aerospace Predictive analytics to foresee future aircraft problems |
| “Who is doing Digital Twins?” Platforms | GE Predix; SIEMENS PLM; Microsoft Azure; IBM Watson; PTC Thing Worx; Aveva; Twin Thread; DNV-GL; Dassault 3D Experience; Sight Machine; and Oracle Cloud |
| “When and Why has a Digital Twin to be developed?” Life cycle and functions | 1. In the design phase The digital twin is used to help designers to configure and validate product development quicker, accurately interpreting market demands and the customer preferences 2. In the production phase The digital twin shows great potential in real-time process control and optimization, as well as accurate prediction 3. In the service phase The digital twin can monitor the health of a product and perform diagnoses as well as prognoses |
| “How to design and implement a Digital Twin?” Architecture and components | The physical layer involves various subsystems and sensory devices that collect data and working parameters The network layer connects the physical to the virtual, sharing data and information The computing layer consists of virtual models emulating the corresponding physical entities |
| Reference Number | Year | Type | Key Focus | Related Keywords |
|---|---|---|---|---|
| [1] | 2022 | Regulatory document | Regulation | EASA regulations, operation of air taxis in cities |
| [2] | 2021 | Journal article | UASs/UAVs | Airspace organization and management, air traffic control, air traffic management, air traffic service provision, unmanned aircraft system, UAS traffic management |
| [3] | 2021 | Journal article | DT, UASs/UAVs | Unmanned aerial vehicles, deep learning, digital twins |
| [4] | 2022 | Other | DTs | Digital twins |
| [5] | 2023 | Other | DTs | Digital twins |
| [6] | 2022 | Other | General aviation | Aerospace certification, digital twins |
| [7] | 2020 | Other | DTs | Digital twins |
| [8] | 2019 | Journal article | DTs | Artificial intelligence, digital twins, human–computer interaction, machine learning |
| [9] | 2018 | Conference proceeding | DTs | Digital twins, learning theories, situational awareness |
| [10] | 2021 | Journal article | DTs | Digital twins, manufacturing system design, smart manufacturing |
| [11] | 2020 | Conference proceeding | DTs | Digital twin concept, digital twin application |
| [12] | 2021 | Journal article | UASs/UAVs | eVTOL, rotorcraft, design, advanced air mobility, urban air mobility |
| [13] | 2022 | Journal article | UAM/AAM | Advanced air mobility, urban air mobility, emergency response, air ambulance, electric vertical take-off and landing, VTOL, eVTOL |
| [14] | 2023 | Journal article | UAM/AAM | Advanced air mobility, connected eVTOL, operations, infrastructure, communications, sustainability |
| [15] | 2021 | Conference proceeding | UAM/AAM | Surveillance, traffic control, aircraft navigation, safety, air traffic control, active appearance model |
| [16] | 2020 | Conference proceeding | UAM/AAM | Urban air mobility, aircraft performance, flight trajectory, autonomous systems, flight control, flight operation, detect and avoid |
| [17] | 2022 | Conference proceeding | UAM/AAM | Urban air mobility, aerial photography, conventional takeoff and landing, airspace management, short take-off and landing, federal aviation regulation, commercial aircraft |
| [18] | 2021 | Conference proceeding | UAM/AAM | Urban air mobility, autonomous systems, human automation interaction, ground control station, air transportation, national aeronautics and space administration, small unmanned aircraft systems |
| [19] | 2021 | Conference proceeding | UAM/AAM | Safety management, urban air mobility, airspace management, unmanned aircraft systems, supersonic aircraft, national airspace system, flight operations quality assurance, aeronautical information service |
| [20] | 2022 | Conference proceeding | UAM/AAM | Urban air mobility, aeronautics, special-use airspace, federal aviation administration, heliports, aviation, take-off and landing |
| [21] | 2022 | Conference proceeding | UAM/AAM | Flight testing, aviation, urban air mobility, propeller blades, true airspeed, flight path angle, vertical take-off and landing |
| [22] | 2021 | Conference proceeding | UAM/AAM | Urban air mobility, airspace class, air transportation, vertical take-off and landing, rotorcrafts, airspace system, helicopters, fixed-wing aircraft |
| [23] | 2023 | Conference proceeding | UAM/AAM | Urban air mobility, landing lights, flight testing, flight management system, flight control system, flight vehicle |
| [24] | 2023 | Conference proceeding | UAM/AAM | Urban air mobility, image registration, Federal Aviation Administration, vision-based navigation, heliports, instrument landing system |
| [25] | 2021 | Conference proceeding | UAM/AAM | Urban air mobility, airspace, software architecture, aeronautics, Federal Aviation Administration, aviation, unmanned aerial vehicle, aerospace industry |
| [26] | 2022 | Conference proceeding | UAM/AAM | Air mobility, Federal Aviation Administration, guidance system, sensor fusion, landing lights |
| [27] | 2023 | Conference proceeding | UAM/AAM | Air mobility, optical sensor, aviation, radar measurement, detect and avoid, take-off and landing |
| [28] | 2022 | Conference proceeding | UAM/AAM | Airspace, urban air mobility, near-mid-air collision, target level of safety, air traffic controller, helicopters, air traffic management, flight planning |
| [29] | 2021 | Journal article | UAM/AAM | Advanced air mobility, cost–benefit analysis, ARIMA forecasting, electric vertical take-off and landing aircraft, small unmanned aircraft system, green transportation |
| [30] | 2021 | Journal article | UAM/AAM | Advanced air mobility, urban air mobility, on-demand air mobility, air taxi, vertical take-off and landing |
| [31] | 2023 | Other | UAM/AAM | Urban air mobility |
| [32] | 2021 | Journal article | UAM/AAM | Urban air mobility, air taxi, electric vehicle, autonomous vehicle, ride hailing, carsharing |
| [33] | 2020 | Book | On-demand mobility, transport modeling, urban air mobility, vertical take-off, landing | |
| [34] | 2020 | Journal article | UAM/AAM | Urban air mobility, vehicle concepts, policy, transport simulation, infrastructure |
| [35] | 2018 | Journal article | Regulation | Drones, aircraft, atmospheric modeling, guidelines, FAA, government policies |
| [36] | 2014 | Journal article | Regulation | Remotely piloted aircraft (RPA), UAV |
| [37] | 2014 | Journal article | Regulation | Co-regulation, self-regulation, aviation safety, drone, RPA, UAV |
| [38] | 2020 | Journal article | Regulation | Drone, regulation |
| [39] | 2016 | Journal article | Regulation | Privacy regulation, drone privacy |
| [40] | 2021 | Journal article | UASs/UAVs | WTP for drone flying, road pricing for drone airspace |
| [41] | 2019 | Journal article | Regulation | Drone, regulation |
| [42] | 2022 | Journal article | Regulation | Drone regulation, local policy adoption |
| [43] | 2019 | Journal article | Regulation | Drones, regulation, policy |
| [44] | 2020 | Other | General aviation | Digital twin, data management |
| [45] | 2018 | Conference proceeding | DTs | Digital twin |
| [46] | 2020 | Journal article | General aviation | Airframe digital twin, digital thread, individual aircraft tracking |
| [47] | 2020 | Conference proceeding | General aviation | Commercial aircraft, machine learning, airspace, artificial intelligence, neural networks, aircraft production, aviation |
| [48] | 2022 | Journal article | DTs | Digital twins, military aircraft, aircraft propulsion |
| [49] | 2019 | Conference proceeding | DTs | Digital twins, aviation industry |
| [50] | 2012 | Conference proceeding | DTs | Aircraft structures, high-performance computing structural modeling, air forces, flight dynamics |
| [51] | 2017 | Conference proceeding | General aviation | Aircraft structures, genetic algorithm, structural damage |
| [52] | 2019 | Journal article | DTs | Digital technology, digital twin, aircraft industry |
| [53] | 2022 | Journal article | General aviation | Digital twin, digital thread, aircraft assembly |
| [54] | 2020 | Conference proceeding | General aviation | Aircraft maintenance, aircraft life cycle, digital twin |
| [55] | 2011 | Journal article | General aviation | Aircraft structural life prediction, digital twin |
| [56] | 2015 | Conference proceeding | DTs | Product avatar, digital twin, digital counterpart, aircraft avatar |
| [57] | 2020 | Conference proceeding | DTs | Product life cycle, digital twin, aircraft |
| [58] | 2020 | Journal article | General aviation | Aircraft manufacture, digital twin |
| [59] | 2022 | Journal article | DTs | Digital twin shop floor, large-scale problem optimization, simulation |
| [60] | 2021 | Conference proceeding | General aviation | Digital twin, aircraft manufacturing |
| [61] | 2022 | Journal article | General aviation | Non-orthogonal aviation spiral bevel gears, free-form tooth surface grinding, digital twin modeling |
| [62] | 2017 | Conference proceeding | General aviation | Flight data, flight operation, flywheels, structural health monitoring |
| [63] | 2021 | Journal article | General aviation | Optimization, digital twin, virtual modules |
| [64] | 2020 | Conference proceeding | General aviation | Digital twin, virtual sensing, aircraft ground-steering system |
| [65] | 2022 | Journal article | General aviation | Aircraft skin, digital twin, layout optimization |
| [66] | 2022 | Journal article | DTs | Autoregressive moving average (ARMA) model, turbofan engine modeling |
| [67] | 2017 | Conference proceeding | DTs | Aircraft wings, stochastic crack growth models, surrogate model, mathematical models |
| [68] | 2017 | Journal article | General aviation | Aircraft wings, stochastic crack growth models, fatigue cracking, airframes |
| [69] | 2022 | Journal article | General aviation | Digital twin, aircraft hydraulics, ensemble learning |
| [70] | 2021 | Conference proceeding | General aviation | Digital twin, aviation, aircraft cabins |
| [71] | 2022 | Journal article | General aviation | Digital twin, aviation industry |
| [72] | 2021 | Journal article | DTs | Digital twin, artificial intelligence, autonomous driving |
| [73] | 2020 | Conference proceeding | DTs | Digital twin, self-aware unmanned vehicle |
| [74] | 2022 | Journal article | DTs, UASs/UAV | Digital twin, model updating, unmanned aerial vehicle |
| [75] | 2020 | Conference proceeding | DTs, UASs/UAVs | Machine learning, unmanned aerial vehicle, recurrent neural network |
| [76] | 2022 | Journal article | DTs, UASs/UAVs | VTOL, UAV, digital twin, aerodynamic coefficients, gazebo, wind model |
| [77] | 2021 | Conference proceeding | DTs, UASs/UAVs | Digital twin, UAV, virtual and real interaction |
| [78] | 2020 | Conference proceeding | DTs, UASs/UAVs | UAV, digital twin, simulation |
| [79] | 2022 | Conference proceeding | DTs, UASs/UAVs | Unmanned aerial vehicle (UAV), multifidelity simulation |
| [80] | 2022 | Conference proceeding | DTs, UASs/UAVs | Unmanned aerial vehicle, deep learning, digital twins |
| [81] | 2022 | Journal article | DTs, UASs/UAVs | Deep reinforcement learning (DRL), digital twin (DT), multi-UAV systems |
| [82] | 2021 | Journal article | DTs, UASs/UAVs | Unmanned aerial vehicles, digital twins, deep learning |
| [83] | 2021 | Conference proceeding | DTs, UASs/UAVs | Digital twin, machine learning, UAV, UAS, cybersecurity |
| [84] | 2021 | Journal article | DTs, UASs/UAVs | Digital twin |
| [85] | 2021 | Conference proceeding | DTs, UASs/UAVs | Unmanned aerial systems, detect and avoid, data-driven simulation |
| [86] | 2022 | Conference proceeding | DTs, UASs/UAVs | Modeling, autonomous drones, digital twin |
| [87] | 2020 | Conference proceeding | DTs, UASs/UAVs | Drones, simulation environment, digital twin |
| [88] | 2021 | Journal article | DTs, UASs/UAVs | Digital twin, model-based systems engineering |
| [89] | 2021 | Journal article | DTs, UASs/UAVs | data models, unmanned aerial vehicles, integrated circuit modeling, digital twin, computational modeling, machine learning algorithms, real-time systems |
| [90] | 2022 | Journal article | DTs, UASs/UAVs | unmanned aerial vehicles, safety, aircraft, aircraft navigation, security, monitoring |
| [91] | 2018 | Book | Regulation, UASs/UAVs | European policies, civil drones, safety, security |
| [92] | 2012 | Book | General aviation | Aircraft structures |
| [94] | 2018 | Conference proceeding | DTs | Digital twin, simulation, cyber-physical system |
| [95] | 2016 | Book | Regulation, UASs/UAVs | Drone laws, RPAS, UAS, UAV, commercial drones, autonomous aviation |
| [96] | 2023 | Other | Regulation | EASA Provisions, EU Regulations 2019/947 and 2019/945 |
| [97] | 2023 | Regulatory document | Regulation | Civil drones, unmanned aircraft |
| [98] | 2023 | Regulatory document | Regulation | Open category of civil drones |
| [99] | 2023 | Regulatory document | Regulation | Specific category of civil drones |
| [100] | 2023 | Regulatory document | Regulation | Certified category of civil drones |
| [93] | 2022 | Regulatory document | Regulation | Rules For Unmanned Aircraft Systems, Regulation (EU) 2019/947, Regulation (EU) 2019/945 |
| [101] | 2021 | Regulatory document | Regulation | EASA guidelines, The Design Verification of Specific Category Drones |
| [102] | 2023 | Regulatory document | Regulation | Rules for Airworthiness and Environmental Certification, Regulation (EU) No 748/2012 |
| [103] | 2021 | Other | Regulation | EU regulatory for U-space |
| [104] | 2021 | Regulatory document | Regulation | Regulation (EU) 2021/664 |
| [105] | 2021 | Regulatory document | Regulation | Regulation (EU) 2021/665 |
| [106] | 2021 | Regulatory document | Regulation | Regulation (EU) 2021/666 |
| [107] | 2023 | Other | Regulation | Autonomous drones, automatic drones |
| [108] | 2022 | Conference proceeding | UAS/UAV | Adversarial machine learning, aviation, urban air mobility, pilot, convolutional neural network, unmanned aircraft system, cyber–physical system |
| [109] | 2020 | Regulatory document | Regulation | EASA AI roadmap, AI in aviation |
| [110] | 2022 | Conference proceeding | Regulation | Reinforcement learning, aviation, European Aviation Safety Agency, artificial intelligence, neural networks, urban air mobility, unmanned aircraft system, air traffic management, continuing airworthiness |
| [111] | 2020 | Journal article | DTs | Digital twin |
| [112] | 2017 | Other | DTs | Digital twin |
| [113] | 2021 | Conference proceeding | DTs | Digital twin technologies |
| [114] | 2012 | Conference proceeding | General aviation | Digital twin, air forces, NASA Goddard Space Flight Center |
| [115] | 2020 | Journal article | DTs | Digital twin |
| [116] | 2018 | Journal article | DTs | Digital twin |
| [117] | 2022 | Other | DTs | Digital twin |
| [118] | 2022 | Book | DTs | Digital twin, digital manufacturing, digital technologies in manufacturing, digital image processing |
| [119] | 2023 | Book | DTs, UASs/UAVs | Digital twin, smart urban mobility, UAV |
| [120] | 2021 | Journal article | DTs | Digital twin, cyber–physical systems |
| [121] | 2023 | Other | DTs, UASs/UAVs | Intelligent urban air mobility, digital twin, autonomous flight |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fakhraian, E.; Semanjski, I.; Semanjski, S.; Aghezzaf, E.-H. Towards Safe and Efficient Unmanned Aircraft System Operations: Literature Review of Digital Twins’ Applications and European Union Regulatory Compliance. Drones 2023, 7, 478. https://doi.org/10.3390/drones7070478
Fakhraian E, Semanjski I, Semanjski S, Aghezzaf E-H. Towards Safe and Efficient Unmanned Aircraft System Operations: Literature Review of Digital Twins’ Applications and European Union Regulatory Compliance. Drones. 2023; 7(7):478. https://doi.org/10.3390/drones7070478
Chicago/Turabian StyleFakhraian, Elham, Ivana Semanjski, Silvio Semanjski, and El-Houssaine Aghezzaf. 2023. "Towards Safe and Efficient Unmanned Aircraft System Operations: Literature Review of Digital Twins’ Applications and European Union Regulatory Compliance" Drones 7, no. 7: 478. https://doi.org/10.3390/drones7070478
APA StyleFakhraian, E., Semanjski, I., Semanjski, S., & Aghezzaf, E.-H. (2023). Towards Safe and Efficient Unmanned Aircraft System Operations: Literature Review of Digital Twins’ Applications and European Union Regulatory Compliance. Drones, 7(7), 478. https://doi.org/10.3390/drones7070478