In this section, we define u, v, and w as the flow velocity components along the
x,
y, and
z axis, respectively. The flow speed U is defined as
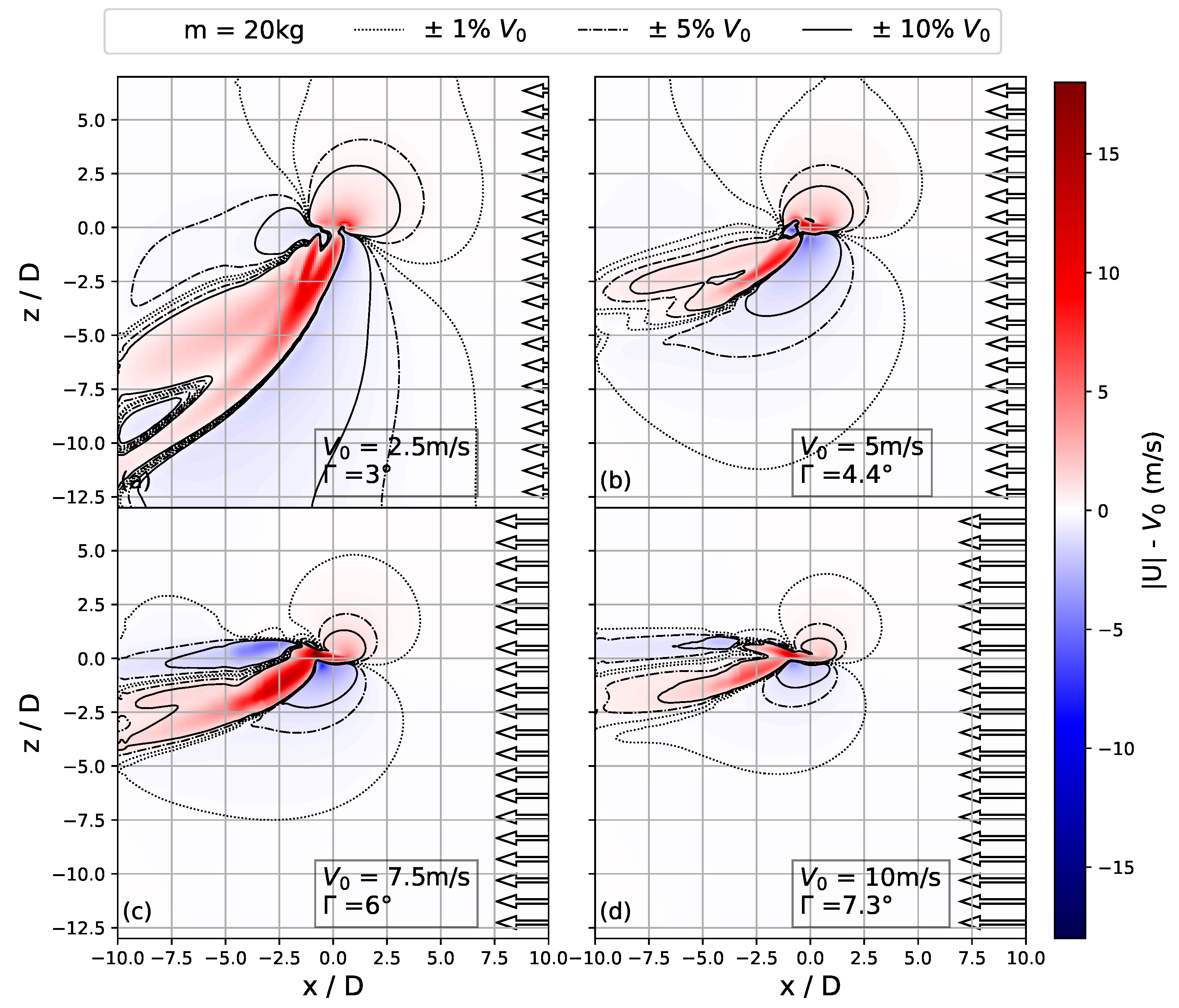
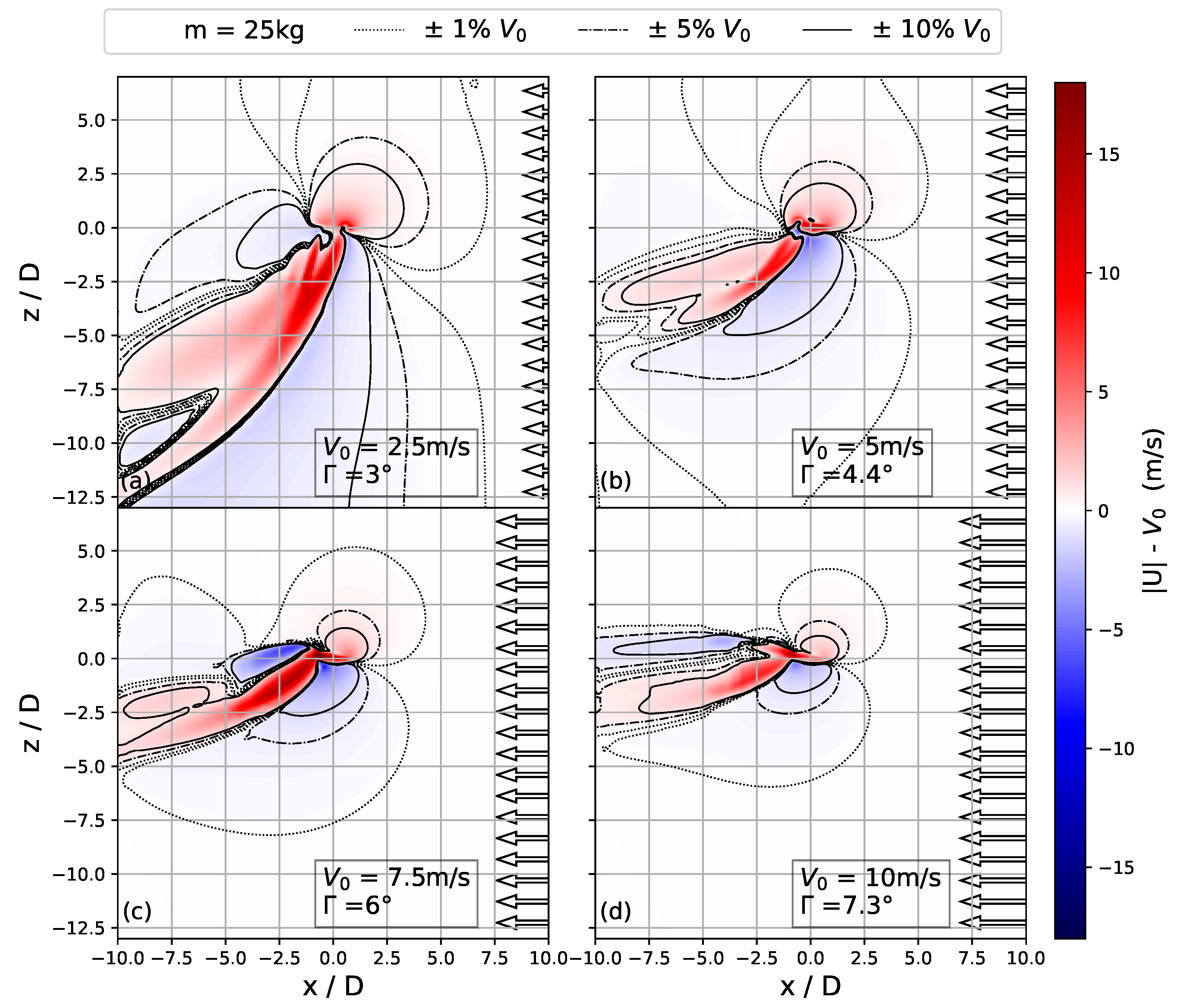
. Since the results from the different weight configurations are qualitatively very similar and only vary in the vector magnitudes, only the results related to the 15
case are shown in this section. Results of the 20 kg and 25
cases are presented for completeness in
Appendix A.2.
4.1. Propeller-Inducted Flow Features
PIF features are described in terms of the deviation of the flow velocity components and flow speed from the background flow. For the sake of brevity, we refer to such deviations as delta flows. The spatial variation of delta flows is shown over vertical (xz-plane) and horizontal (xy-plane) cross-sections.
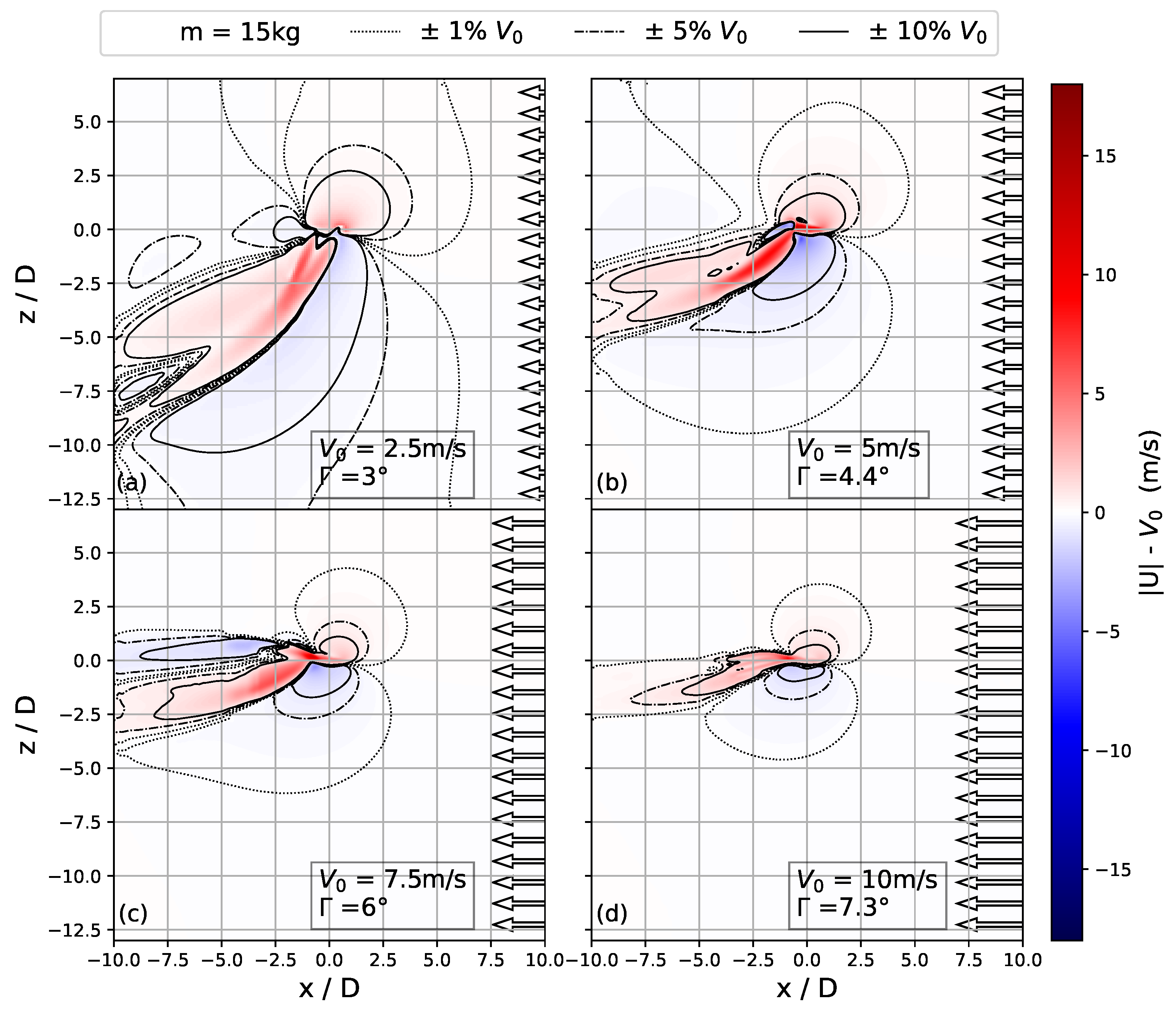
Figure 7 shows |U| delta flow over vertical cross-sections (xz-plane, y = 0), and it features a panel for each of the inlet boundary inflow conditions (2.5 m s
−1, 5 m s
−1, 7.5 m s
−1 and 10 m s
−1).
The center of the UAV’s fuselage sits at (0,0,0), and the background flow is oriented from right to left. In the following, the color map scheme for the flow deviations (delta flows) is chosen in a way that the white color indicates a zero delta flow, while red and blue are associated with speed-up (positive delta flow) and slow-down (negative delta flow) with respect to the incoming wind field. All the panels share the same color grading. In addition,
Figure 7 features dotted, dashed, and continuous contour lines that enclose areas with the absolute value of relative delta flow (delta flow over background flow) of 1%, 5% and 10%, respectively.
Figure 7 shows that the PIF manifests both by flow acceleration and deceleration; these features are asymmetrically located both in the vertical and horizontal direction. The areas enclosed by the contour lines decrease as the background flow increases.
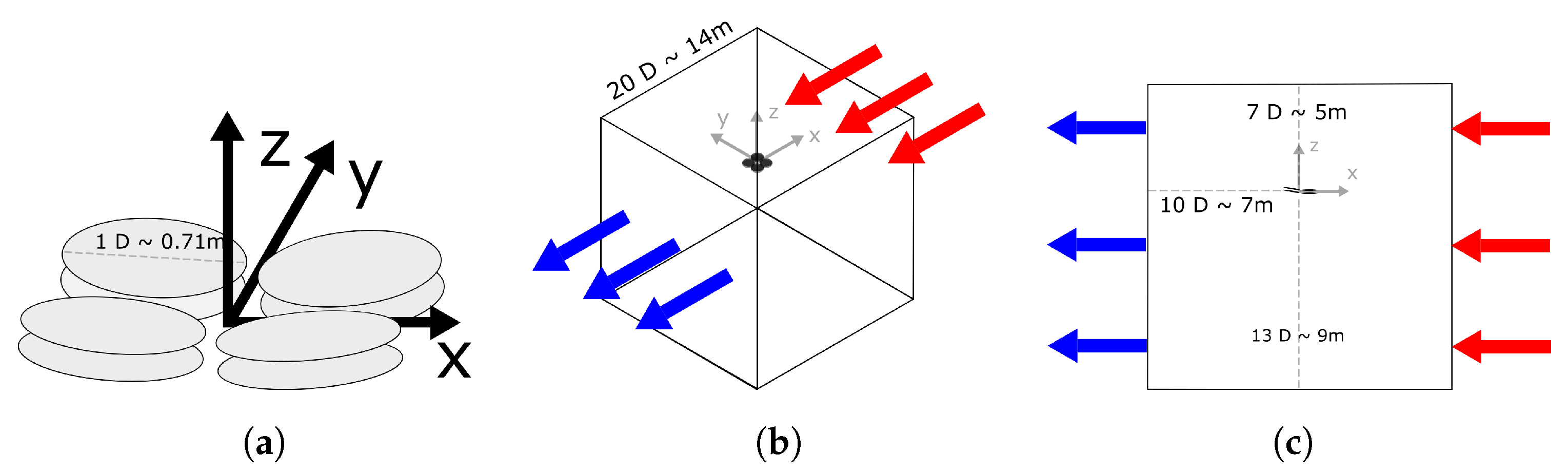
In general, the absolute delta flow values increase with the background flow. Maxima in delta flow are confined to an area between one rotor diameter above and three rotor diameters below the drone. The absolute maximum is reached in the m s−1 case with a value of m s−1 (16 m s−1 and 17.9 m s−1 in the 20 kg and 25 kg cases, respectively). Looking at the relative delta flow values, i.e., normalized by the background flow, the trend is reversed. The maximum relative delta value is found at = m s−1 where |U| is 347% higher than the background flow in the 15 case and 425% higher for the 25 one. The minimum relative delta value is found in the 10 m s−1 case, for |U| = 180% at 15 and |U| = 250% .
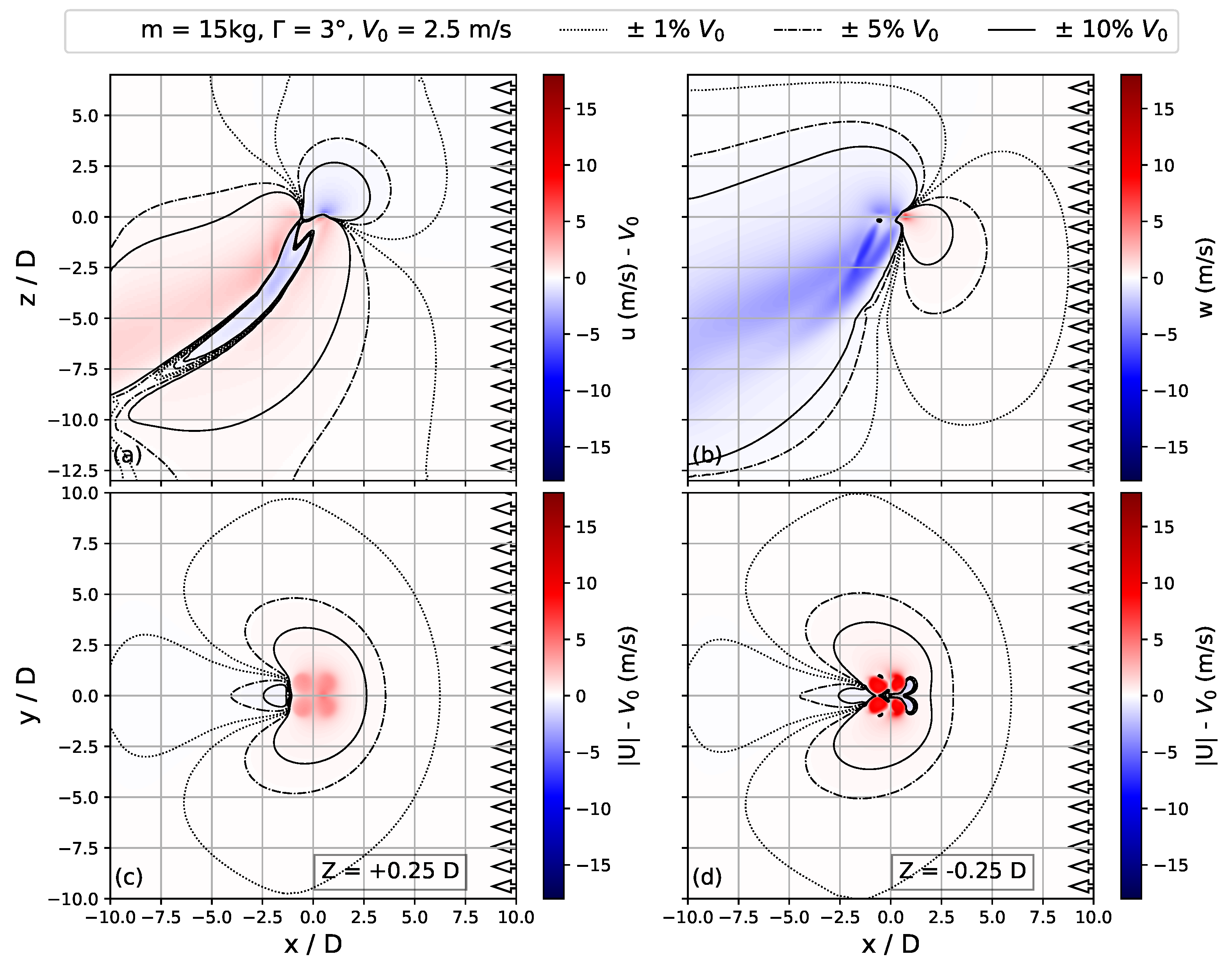
Figure 8 shows a more detailed picture of the three-dimensional flow structure around the UAV and focuses on the
=
m s
−1 case study.
Figure 8a,b show vertical cross-sections (xz-plane at y/D = 0) of u and w delta flows, respectively. It is pointed out that the vertical component of the background flow is zero.
Figure 8c,d feature |U| delta flow over horizontal cross-sections (xy-plane) at z = 0.25 D and z = −0.25 D in order.
Figure 8’s design relies on the color scheme and contour lines previously presented in
Figure 7.
Figure 7 and
Figure 8c,d show that acceleration and deceleration features are found mostly below the rotor plane, whereas the flow above the rotor plane undergoes downward acceleration. Local flow decelerations are found in both downwind and upwind regions from the ADs, and they are from now on referred to as the wake and the induction zones, respectively. The wake is that part of the volume situated downwind, for negative x/D values, that sits behind the accelerated stream. In the wake, the flow experiences horizontal deceleration while being pushed downwards. The induction zone results from the interaction between the accelerated flow directed downwards and the background flow. It is located in the lower portion of the volume at z/D < 0 and x/D > 0. The induction zone below the mean rotor plane becomes wider with increasing distance, as it is shown in
Figure 8c,d, and the flow running in this area is decelerated mainly in the horizontal component, as shown by
Figure 8a,b.
4.2. Sensor Placement Study
As mentioned in
Section 1, this paper aims to evaluate where the PIF is minimal to identify suitable positions for turbulence measurements. Since the corresponding sensors are usually boom-mounted, we now investigate how long the sensor arm should be and in which direction it should point to minimize PIF effects on the turbulence measurements. Consequently, we now proceed with our analysis in a polar coordinate system that has its origin in the center of the drone. The downwind portion of the domain volume (x/D < 0) encloses the largest flow distortion and thus the highest flow variations. For this reason, it is discarded from further analysis.
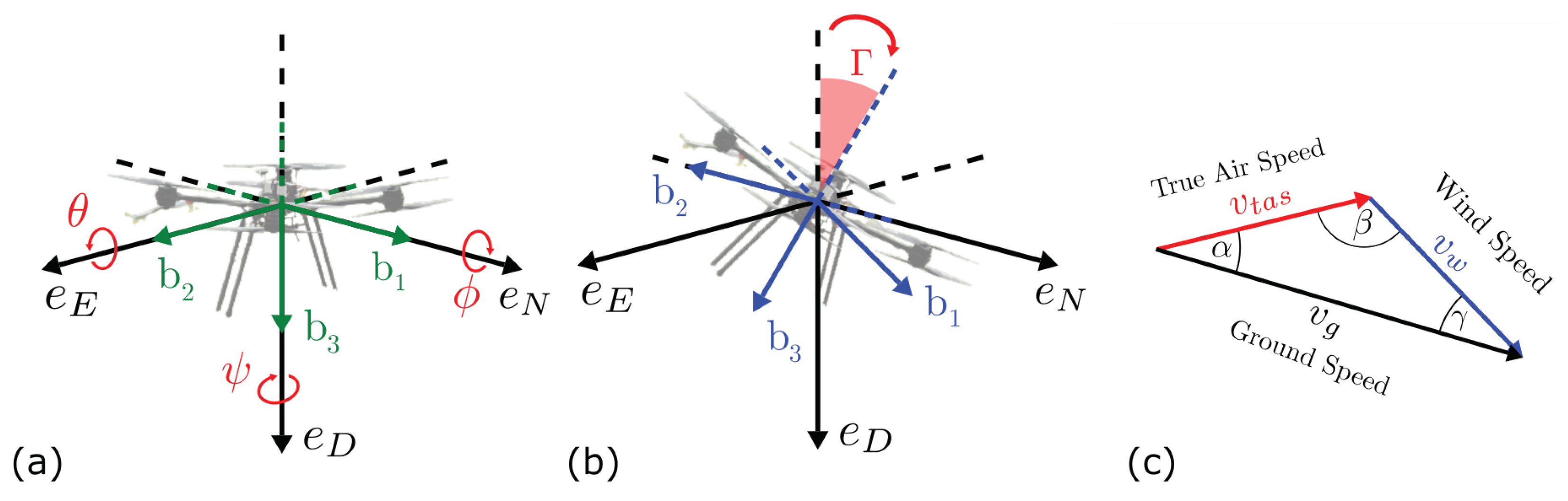
Figure 8c,d indicate that the flow is symmetric about the xz-plane that passes through the center of the coordinate system (y/D = 0). Mounting a sensor in this plane has the advantage of reducing the potential flow-inducted torques around the yaw axis. This increases the stability in flight, as well as increasing the operational time. Therefore, the PIF spatial variability in radial coordinates of the upstream portion of the xz-plane (x/D > 0, y/D = 0) is targeted for analysis. For this, we transform the contour lines previously presented in
Figure 7 to a polar coordinates system that originates in the center of the fuselage and shares axes with the BF reference frame introduced in
Section 2. Each point of the contour lines is described by R, the distance vector that origins in (0,0,0), and
, the angle between R and
. The
angle is defined as negative going towards
and varies from −90° to 90°, while the values of R are limited by the domain size. We define
,
, and
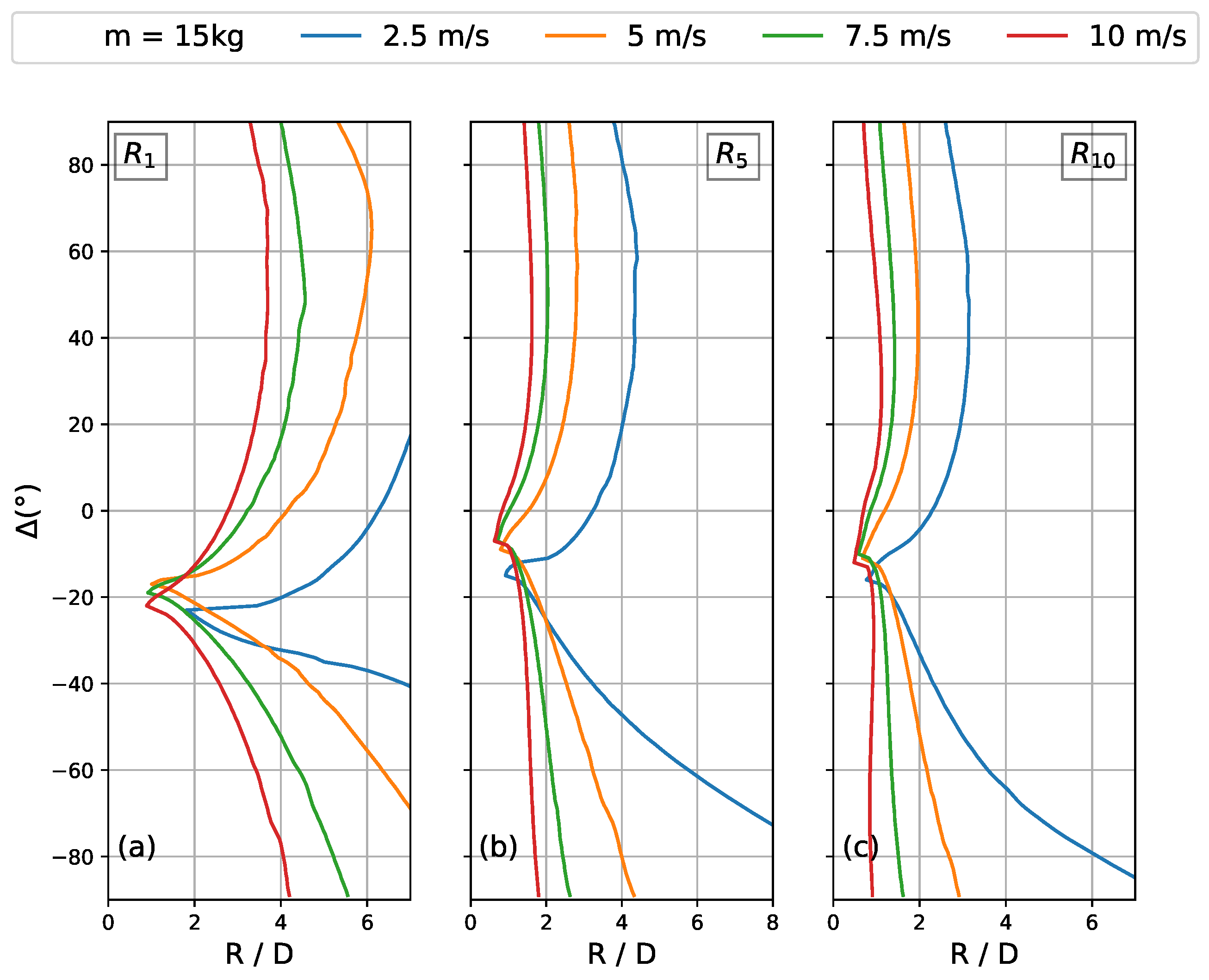
as the 1%, 5%, and 10% delta flow contours lines in polar coordinates, accordingly. Results are presented in
Figure 9. This figure is divided into three panels, each of which shows the distance threshold values for all the tested inlet speeds for the 15 kg case. Plots for the cases with 20 kg and 25 kg can be found in
Appendix A.3.
Figure 9 shows that the
values become smaller as the wind speed at the inlet increases. In other words, the higher the ambient wind speed, the shorter the required sensor arm length to reduce the PIF influence on the measurements. Changes in the mass of the drone are less relevant for the PIF than the changes of
; the biggest change due to mass variation for
is found in the
m s
−1 case: the average increase of
values from the 15
to the 20 kg and 25
cases is 13% and 21%. On the contrary, changes in the variation of the wind speed
between
m s
−1 and 10 m s
−1 result in changes in
values up to 80%. The results are compatible with previous experimental studies by e.g., Wilson et al. [
51]. Despite using a UAV with propellers of
mm mm diameter, i.e., roughly a factor of 10 smaller than ours, they come to a similar conclusion and showed that the PIF at 5.3 D (roughly 400 mm) above the UAV at the center of the fuselage, has negligible impact on the wind speed measurements. Wilson et al. compared high-frequency velocity data recorded by an ultrasonic anemometer (92,000, R.M. Young) on a mast to the one measured by a sonic anemometer (Trisonica Mini) mounted on a UAV at different vertical distances; they show a deviation of the mean wind speed between these two measurements of 0.7%, 5.5%, and −1.8% at 5.3 D, 6.6 D, and 8 D accordingly. Our results show that in the worst-case scenario (
Figure A4), on top of the UAV (
= 90°) at a distance between 3.9 D and 7 D, the flow undergoes an absolute distortion in between 1% and 5%. Prudden et al. [
19] measured the PIF of a UAV with a propeller size of 330 mm. They did so in a wind tunnel set-up varying the inlet flow from 4 m s
−1 up to 8 m s
−1, focusing on the upwind flow distortion in terms of flow angle deflection and flow speed. They show that the flow angle undergoes a deflection of fewer than 2 degrees at 3.35 D along
. So, it is still possible to measure PIF at that distance. Nevertheless, they concluded that this distortion is so small that it can be neglected. In addition, they point out that mounting a sensor more than 3.5 D towards
to avoid all induced flow effects is not a feasible solution with respect to flight stability. Consequently, it is necessary to find a feasible compromise. Prudden et al. [
19] suggest 1.25 D towards
as a reasonable mounting distance since the flow in that position is characterized by an acceleration of less than 2% and an angle distortion of fewer than 2°. According to our results, a distance of 3.95 D and 3.4 D along
would suffice to measure a distortion of 1% at
m s
−1 and 10 m s
−1, accordingly, and a distance of 1.3 D and 0.98 D for a 5% one. The results presented in
Figure 9 show that, in general, the smallest values of
are found in a range of
angles that varies from −10° to −23°. This suggests that moving the sensor upwind, along a horizontal plane lower than the one that passes through the center of the related fuselage, is the more efficient way to reduce the relative PIF influence on the measurements. For each curve presented in
Figure 9, among all the (
,
) points in that curve, we define the closest one to the fuselage as (
,
).
Table 5 lists, for each threshold distance curve, and for each tested inlet velocity, the minimal distance points coordinates (
,
), the radial distance in meter
, and its projections onto the
and
BF reference frame vectors, called
and
, respectively.
Table 5 shows that the (
,
) points sit in a 0.48–1.81 D distance range from the fuselage, at an angle that varies in between −7° and −23°. This corresponds to a 0.46–1.66 D range along
, and a 0.01–0.7 D range along
. Therefore, the suitable position for a turbulence-sampling sensor, e.g., ultrasonic anemometer, is not universal and depends both on the acceptable PIF threshold for a given application and the ambient flow conditions.
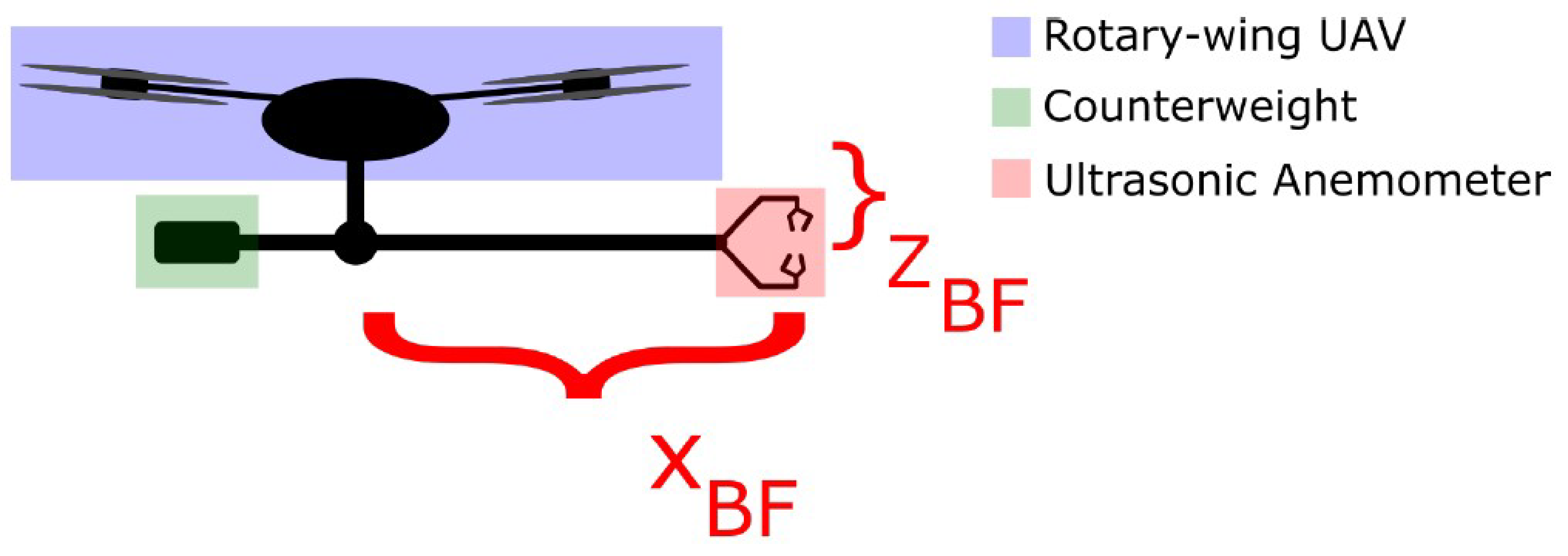
Based on the results shown in this paper, we now introduce a design of a boom-mounted ultrasonic anemometer that aims to sample turbulence in offshore wind farms. The design is named SAMURAI, which stands for “sonic anemometer on a multi-rotor drone for atmospheric turbulence investigations”.
Figure 10 presents a sketch of the SAMURAI system.
In this design, an ultrasonic anemometer is installed on the tip of a horizontal boom pointed upwind, at a horizontal sensor mounting distance of m, and a vertical one of m from the center of the fuselage in the BF reference frame. The asymmetry in the weight distribution is compensated by a counterweight mounted on the other end of the boom. The choice for and is justified as follows:
Since relevant velocities in the wind energy field are higher than 5 m s−1, the results related to the m s−1 case study were not given priority over the choice of and ;
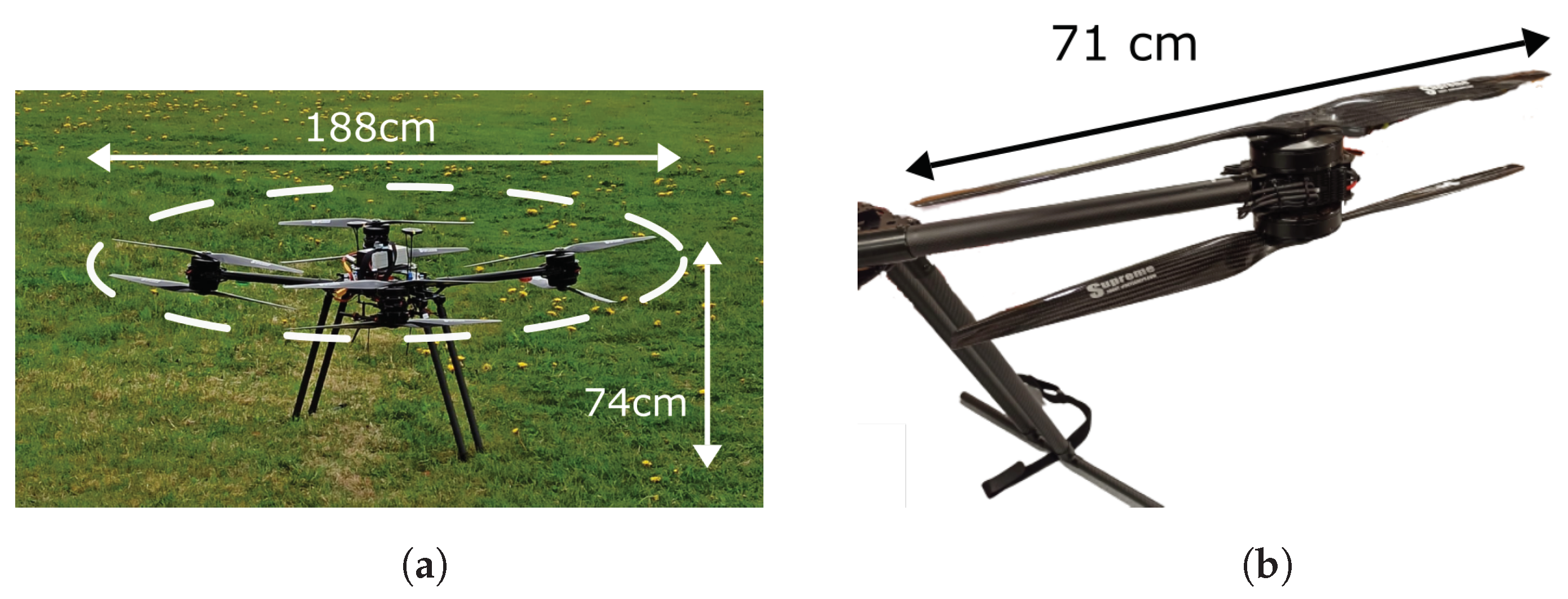
The total height of the tested UAV (74 cm) puts a limit on the vertical mounting distance of the boom. To increase safety during the landing phase we decided not to lower the boom more than 20 cm from the center of the fuselage. By doing this, we assure a safety distance of 44 cm between the boom and the ground;
The size of the tested UAV (overall diameter from rotor-tip to rotor-tip 188 cm) puts a limit on the horizontal displacement of the sensor as well. In case of a faulty landing, having the sensor mounted at a horizontal distance higher than the UAV radius,
, can reduce the damage to the system. The results shown in
Table 5 suggest that, for the set-up presented in this paper, a horizontal sensor-mounting distance
m would be enough to measure wind with a |U| delta flow in between 5% and 10% for
=
m s
−1, and less than 1% for all the other case studies. In absolute terms, this means a deviation in between
m and
m for
=
m s
−1, and less than 0.05 m s
−1, 0.075 m s
−1 and 0.1 m s
−1 for the 5 m s
−1, 7.5 m s
−1 and 10 m s
−1 case, accordingly.
Finally, an in-depth list of flow features averaged around a 10 cm radius circle around the mounting position (
=
m,
=
m), is presented in
Table 6.
The listed values show that at the designed coordinates, the flow is tilted upwards with an angle that decreases as the background flow increases. The flow angle values are lower than 11.1° ± 5.24°, and so they are within the acceptable measuring range of most ultrasonic anemometers, e.g., CSAT3B by Campbell Scientific. Moreover, the aforementioned anemometer has a nominal maximum gain error ±3% when reading a wind vector within ±10° angle from the horizontal plane, that is a bigger error range than the bias due to the PIF influence. For this reason, the ( = m, = m) is considered to be a suitable mounting spot for turbulent sampling instruments.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









