1. Introduction
The problem of tracking a maneuvering object using a model with random factors is a typical application of stochastic filtering theory and methods [
1]. In addition to navigation, these methods are widely used in other areas, sometimes entirely unexpectedly, such as medicine, industry, economics, and telecommunications [
2,
3,
4,
5,
6,
7]. The model and problem statement discussed in the article are inspired by the popular modern applied field of autonomous underwater vehicles (AUVs) [
8]. Many works are devoted to AUV applications, most of which are related to control tasks. The special issue of [
9] sufficiently illustrates the scope and magnitude of the research interest in this area. Moreover, let us pay attention to the fact that researchers use many new methods as tools, primarily due to the development of machine learning (a typical example is work [
10], and there are many such works [
11]). At the same time, the conventional tasks of target tracking remain in demand; one can find many new and exciting things in them [
12,
13,
14,
15,
16,
17,
18,
19,
20]. Here it is necessary to note the tasks of tracking multiple targets [
21,
22], the solution of which, as well as conventional statements, is provided by stochastic filtering methods.
The Kalman filtering model, algorithm [
23], and many different suboptimal filters have become widely used. The simplest algorithms of this kind, starting with the extended Kalman filter [
24] and modern developments of the odorless or cubature Kalman filters [
25,
26,
27], can be effective in individual applications. Such ideas have found many applications and options for development/improvement. An excellent attempt to systematize the results in this area was made in [
28]. To date, many more works have appeared devoted to the research and improvement in such suboptimal filters [
29,
30,
31,
32], including those applied to target tracking tasks of AUVs [
33]. However, no fundamentally new ideas have been proposed, and the initially existing shortcomings remain. The essence of these disadvantages is that none of these filters guarantees accurate characteristics for at least any broad class of models. That is, the estimates do not guarantee either the absence of bias or the limitation of the error, at least by the variance of the estimated state. This means there is always a danger that the filter will be unstable in another model and the estimate will diverge. The only guarantee is a practical experiment with a specific model and a fixed set of parameters.
It should be noted that the problem of delayed observations is well known in the field of application under discussion. Such delays are due to a prominent characteristic of acoustic meters: the dependence of the acoustic wave propagation velocity on temperature, salinity, and water pressure [
34]. This attracted attention in the above-mentioned study [
20], and a solution was found by combining measurement data from acoustic sensors with information from other sensors in the onboard inertial navigation system. A more typical way to deal with delayed observations is to estimate the delay time and consider it by adjusting the usual filter [
35]. Interestingly, the delay in observations is explained by nature not only for underwater observations but also in some chemical processes [
36].
It should be understood that models with a deterministic delay time have limited use because, in reality, the delay time is random and significantly depends on the observation conditions, and most importantly, it changes during tracking. Moreover, these changes can be significant. In the model proposed in this article, the time delay of observations is described by a random process, which is a known function of the state of the observation system. Such a description of delays makes the model as adequate as possible when describing the results of the acoustic sensors.
At the same time, formally, the model of the observation system remains a Markov process model with discrete time. Hence, the classical Bayesian filtering procedure can be applied to it [
37], i.e., obtaining recurrent relations for the a posteriori probability density is possible. The next section of the article shows these relations. However, this formal success turned out to be relevant only to justify the impossibility of practical implementation of either the optimal filter itself or its suboptimal simplifications. The reason for this is that the formal reduction of the equations of the observation system to the traditional form enormously increases the dimension.
An alternative to suboptimal filters is the conditionally minimax nonlinear filtering (CMNF) [
38]. Initially and in development [
39], this method focused on applications in aircraft tracking tasks, which remain relevant for modern tasks [
40]. However, the same approach has shown effectiveness in specific tasks for AUVs. So, in [
19], an already modified CMNF for tracking underwater vehicles was shown, but with an emphasis on the efficiency of using Doppler sensors. It turned out that the CMNF algorithm does not require refinement for the proposed model with random delay. It is only necessary to clarify the conditions of existence.
Section 3 of the article contains the statement required.
It turned out to be more challenging to adapt the typical filter structure to the task of AUV tracking. A standard filter structure using a prediction via a system state model and a correction in the form of a residual did not show good results when processing the acoustic observations. Nevertheless, the flexibility of the CMNF method made it possible to adjust the filter structure, consider the physical properties of observers, and obtain a very effective estimate as a result. Within the framework of the numerical experiment presented in
Section 4 of the article, we show the process of physically justified adjustments to the filter structure.
Section 5 contains concluding remarks, including considerations on options for further development of the proposed method.
2. Observation System Model and Optimal Filtering
The model uses discrete time. It is assumed that the filtering process, i.e., the calculation of the first state estimate, begins at the moment
. The maximum possible delay is known and is equal to
; therefore, the state of the system
begins to form at the moment
Thus,
and the initial state is set at the moment
. Three variants of recording the equations of the observation system are considered. The first one has the most general form:
The second version of the recording is a discrete analog of the diffusion process:
The latter version is the most particular, but the most frequently used. This model is used by many suboptimal filters. It is also the most convenient for optimal Bayesian filtering. The system with state-independent noise is written as follows:
In (1)–(3) represents the system state vector; is the discrete white noise modeling perturbations of the system; is the initial state vector; is the vector of indirect observations; is the discrete white noise modeling measurement errors; vectors are assumed to be independent in aggregate. The model of observations delays, , is given by a vector of the same dimension as the observations themselves. The elements of the vector, , set the time delays for the corresponding components of the vector Namely, each component is a random sequence with values in the set , i.e., for We consider as a composite vector containing the states with all the shifts , i.e., . This notation makes accurate (1)–(3) and further relations.
The problem of estimating the state from observations , is considered, and the evaluation accuracy criterion is the mean square, i.e., is the mathematical expectation of the vector , and is the usual Euclidean norm of the vector .
Thus, the random observation delay (
) is the only difference between the considered problem statement and the traditional one of filtering the state of the observation system in discrete time. This difference does not exist formally because the following shows how to bring systems (1)–(3) into the traditional recording form. Therefore, the optimal solution is a conditional mathematical expectation of
relative to observations
So, it is enough to know the a posteriori probability density of
relative to
. Next, the a posteriori density for system (3) and
will be written out in the form of recurrent Bayesian relations [
37] under conditions when the necessary probability densities exist, i.e., under certain restrictions on the continuity of nonlinear functions and perturbations in (3). We avoid unnecessarily cumbersome relations with no practical value by limiting the discussion of the optimal filter to the system (3). For formal conclusions, system (3) is sufficient.
The non-Markov observation system (3) can be written as a Markov process with an extended state vector. Formally, this extended process will have the same form (3), but with
The extended state vector is further denoted by
and is a composite vector, consisting of all the states of the system from time
to the current moment
, i.e.,
. The notation
is used here for the transpose operation. The equation for
has the following form:
where
denotes a sub-vector of vector
with elements from
-th to
-th.
Denoting such a transformation of the state vector by
, and the corresponding additive noise by
, we obtain the equation of state in the following form:
To obtain the relation for the observer, we define the matrix function
as follows:
Thus, the rows of this matrix contain all possible observations at time
due to delays
without noise. To describe the delays themselves, we also introduce the matrix function
, which takes values by the following rule:
Thus, the element of the matrix takes the value if the observation corresponds to the delay
These two notations allow us to write the equation of observations in the following form:
Thus, (4) and (5) are the canonical form of a Markov observation system with discrete time and additive independent noises.
Further, the values that the function
can take are denoted by
,
The sequence number
can be set by putting
where
is the row number of the
-th column of the matrix
, in which there is
.
These notations make it possible to recalculate the possible values of the observer function
. Denote the value of this function with the same number
from (6) by
; then,
Here, is the -th coordinate of the vector . Thus, consists of observations without noise, shifted by the delay values corresponding to the ordinal number given for the matrix by the relation (6).
In addition, the possible values of the time delay vector
are numbered as follows:
The designations could be more convenient, but they are needed to represent the optimal Bayesian filter. To this end, we introduce the following rules for the designation of probabilistic characteristics. For random vectors , via denote the composite vector using the notation (transpose).
The probability densities used below will be denoted as follows: is the marginal density of , is the density of the composite vector , and is the conditional density of x relative to y under the additional assumption .
Additionally, we list all the symbols used:
Symbol is used to denote random vectors in the notations of the original observation system (3);
Symbol is used to denote arguments of probability densities corresponding to ;
Symbol is used to denote random vectors in the extended state notation in the observation system (4) and (5);
Symbol is used to denote arguments of probability densities corresponding to ;
Notations and are used for the vector of all observations up to and including the moment , i.e., , and for the corresponding probability density argument.
For the conditional distribution of the state
of the observation systems (4) and (5) with respect to observations
it is possible to formally write the recurrent Bayesian relations for the a posteriori probability density [
37]:
This expression can be used only if all probability densities exist in it. For systems (4) and (5), this is not the case for the transition density . In addition, it is necessary to take into account the explicit form of density .
The transformations performed in the following theorem allow us to use instead of the transition density of the expanded state and the transition density of the initial state. Accordingly, we can instead compute instead , which is calculated according to the space and the integral according to the space . In addition, an explicit form of density, , is written.
Theorem 1. Let be given for system (3) and fulfilled:
The probability density of perturbations , is continuous and the vectors have finite second-order moments;
The probability density of observation errors is continuous, and the vectors have finite second-order moments;
The probability density of the initial state is continuous, and the vector
has finite second-order moments;
Function
and
are continuous and satisfy the condition of linear growth, i.e., there exists a constant
:
Then, for the a posteriori probability density
of the extended state
of the system given by the relation (4), with respect to observations
and the estimates of the optimal Bayesian filter
of the system (3) state, the following recurrent equalities are performed:with an initial conditionand the numbering rule for
defined in (6). In the recurrent equalities of the theorem for a posteriori densities
, arguments are omitted, and the recording of the sum is simplified. Note that there are no formal reasons preventing computer implementation (7). However, there needs to be more realism in performing such a computer calculation due to the increase in dimension, the scale of which determines the value of
. In the numerical experiment discussed later in the article,
. So, even with small
and
, the integrals in (7) will be in the space
, and the summands will be
. With such parameters, calculations according to (7) cannot be performed in practice. This confirmed the need for realistic prospects for using classical filtering algorithms in the problem under consideration that both the extended observation system (4) and (5), and Theorem 1 were needed.
Proof of Theorem 1. Let us constitute the desired a posteriori density in the following form:
Next, for the first multiplier
we perform the following transformations:
For the second multiplier
, it holds
In the last equation, the arguments for the densities and are omitted, the summation is denoted as , and it is taken into account that the coefficient is a normalizing factor.
Conditions of boundedness of the second-order moments and linear growth of the functions of the system are sufficient for the existence of second-order moments of and : , and optimal in mean square sense estimate . □
3. Conditionally Minimax Nonlinear Filter
The main statements of the conditionally minimax nonlinear filtering (CMNF) theory are in the works [
33,
34]. Further, they are formulated briefly, considering the features of the surveillance system under consideration.
CMNF estimate
of the state
by the observations
has the form of prediction-correction:
A basic predictive function
is used to calculate the prediction
. As a simple example for system (1), we can take
The basic correction function
is used to calculate the correction
. As a simple example for observations (1), we can give the residual, i.e.,
Conditionally minimax prediction
and correction
are solutions to the following optimization problems:
where
denotes the distribution of the vector
It is assumed that
is a class of all probability distributions with mean
and covariance
. Thus, the basic prediction and correction are refined best (in the sense of proximity in the mean square to the estimated state) under the assumption that only the second-order moment characteristics of the estimated
and observed
variables are known.
We emphasize that the options for choosing the structural functions and are not limited by anything. In practice, such a choice may be an independent task, the solution of which will allow taking into account the nature of a particular dynamic system. Such an example is given in the article’s next section devoted to experimental research.
The worst distribution in problems (8) is the normal one, and the corresponding best estimate in the mean square sense is determined by the normal correlation theorem [
41]. Thus, solutions (8), i.e., optimal in the minimax sense functions
and
are linear as follows:
were
In (10), the notation is the covariance of and , is the Moore-Penrose pseudoinverse.
Alongside this, the prediction
and the state estimate
are unbiased and provide the following estimation accuracy:
It is essential to understand that the relations (9) and (10) determine the conditionally optimal Pugachev filter [
42,
43,
44], the linear structure of which is postulated initially. Accordingly, the CMNF concept complements this filter with a minimax justification of the structure. The second element of the CMNF concept is a method of practical determination of the coefficients
,
and
by the Monte Carlo method. The practically used filter is obtained by replacing (10) mathematical expectations and covariances with their statistical estimates from computer simulation.
The primary attention should be paid to the fact that for the presented model of a stochastic observation system with random delays, the CMNF estimate is determined by the same fundamental relations (8)–(10), initially written for the canonical form of the Markov system. At the same time, delays are not ignored, and their statistical properties are considered in the filter parameters (9). A more subtle account of the phenomenon of delayed observations can be provided due to flexibility in the choice of structural functions and . This will be demonstrated in the next section of the article. Here it remains for each of the variants of the model version (1) or (2) (note that entry (3) is a simple case of (2)) to formulate the conditions for the existence of solution (10). This is conducted in the following statement.
Theorem 2. Let the following conditions hold:
For the observation system (1):
there is a function such that and
;
there is a function
such that and
;
there are constants
and such that for the structural functions of the CMNF, it holds: and ;
For the observation system (2):
Disturbances
, observation errors
, and initial conditions
have normal distributions (or any distributions with all finite moments);
there are constants
and
such that
.
Then, the prediction
and the estimate
of the conditional minimax nonlinear filter (8) exist, are described by the relations (9) and (10), and ensure the quality (11).
Proof of Theorem 2. The statement is an adaptation of the existence theorems of the CMNF estimate formulated in [
38]. The proof is based on two propositions. First, it is the solution of the minimax problems (8). The worst distribution of
on the class
is the normal distribution. Therefore, the minimax estimate of
is the estimate of normal correlation, i.e., a linear function of observations
. Secondly, it is necessary to check the sufficiency of the theorem conditions for the existence of the second-order moments of the functions used, i.e., covariances of vectors
and
This becomes obvious if we use the canonical Markov form for writing (1) and (2) using the extended vector
defined in (4). Since
, the existence of the necessary moments follows from the existence theorems [
38]. □
4. Tracking an AUV Moving in a Plane at a Constant Speed
4.1. Observation System Model
For the practical study of the proposed model with random delayed observations and the filtering algorithms (9) and (10), a simple movement model in a plane with constant velocity is chosen. This example is of a model nature and does not pretend to be practical, since at this stage of research, it is important to make sure that the proposed methodology is fundamentally effective. For this reason, the model parameters are given “extreme” numerical values for practice. In particular, this applies to average speeds and maneuvering speeds. This technique puts the algorithm in much worse conditions than can be the case in practice.
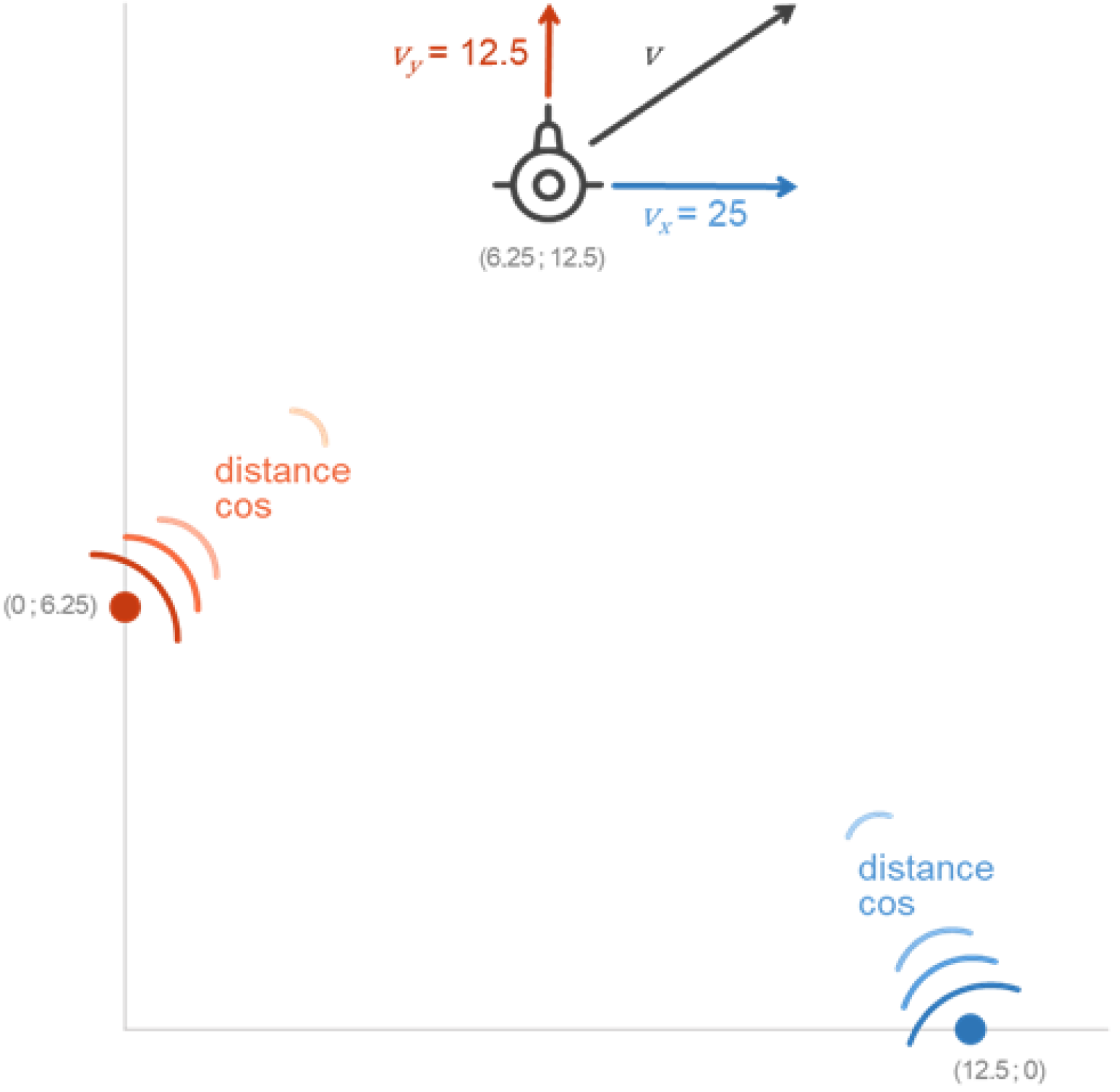
It is assumed that the AUV moves at a depth in the horizontal plane . Random noise is added to the current speed at each moment, simulating chaotic maneuvering. The coordinates of the AUV trajectory are denoted, as is customary, as and Note that these designations should be distinct from the designations of the state vector and observations in the original models (1), (2), or (3). The unit of position measurements is in kilometers (km), time is in hours (h), and speeds are measured in km/h. The continuous movement model is sampled in increments of h, corresponding to a frequency of about three measurements per second. For the convenience of a graphical representation of the results, it is assumed that the movement begins at time and ends at time , i.e., the movement lasts 6 min. The systematic constant AUV speed values are km/h and . During the movement, the AUV moves an average of km. The Gaussian vector gives the initial position of the AUV , which has the mean and the covariance
The same type of observers are located at two points on the same plane: the first has coordinates , i.e., it is located km from the origin on the axis, the coordinates of the second are , i.e., km from the origin on the axis. Assuming that acoustic sonars are used for observation and that the speed of sound in water is equal to km/h, it is possible to determine the maximum possible delay of observations , i.e., the maximum value by which observations can be delayed is s. Accordingly, the filtering process and the first estimate appear at time , i.e., s after the start of movement (we can assume after the target is detected).
The source of the observer model is typical acoustic sonars [
45,
46] that measure the bearing and Doppler frequency shift. So, we can assume that the azimuth angle and range are measured, i.e., the AUV acoustic signature is considered known. Each observer measures the range and the direction cosine to the target with an additive measurement error. The error vector is assumed to be the Gaussian with mean
and the covariance
One can use the work [
47] to understand the accuracy parameters of real devices. The scheme of movement and observation is illustrated in
Figure 1.
So, we have the following observation system. The state vector has the form
Describing chaotic velocity changes vector is assumed to be Gaussian with mean and two variants of covariances: (1) and (2) . Accordingly, in the first case, the AUV can change the speed by about 25 km/h, and in the second, by about km/h. Thus, case (2) is about a high-speed maneuvering target. For the presented calculation, it is more interesting because it gives a very diverse trajectory.
The measurements performed are denoted by
(distances measured by the first and second observers) and
(direction cosines measured by the first and second observer). The vector of observation errors is denoted by
. Thus, the observation vector is as follows:
Taking into account the selected sampling step
and the speed of sound in water
, the values
and
are expressed in terms of the observer distances up to the AUV, i.e.,
In (14), the notation is used for the floor function of , and the potential possibility of removing an observed object at a distance for which the delay value becomes greater than the specified maximum is taken into account.
4.2. CMNF Structure
To implement the CMNF algorithm, it is required to determine the structure of the filter, i.e., to select the basic prediction function
and the basic correction function
. The linear model of movement (12) does not require clarification of the typical choice of the structure due to the system, i.e.,
We can also try and choose a residual as the basic correction structure, i.e.,
In theory, even the fact that the delay
is not taken into account in the residual (15) should not interfere with the operation of the filter. However, the first experiments have already shown that the structure (15), although it gives a working filter, could have a higher accuracy. The apparent idea is to supplement (15) with a delay estimate of the form (14), i.e.,
but two different delays did not lead to an improvement in the result.
A positive result was obtained when the observations’ physical nature was considered in the correction structure. Namely, if we assume that there is no noise in (13), we can determine the AUV’s position by recalculating the distances and cosines into Cartesian coordinates. Such a transformation gives the following correction structure:
In addition to the geometry of observations in correction (17), the delay estimate (16) is also used. Thus, (17) are two estimates of the AUV position that each observer could give independently without considering measurement errors. Combining these estimates and taking into account the impact of errors is already the filter’s task, i.e., of the relations (10).
It should be noted that the demonstrated flexibility in selecting the estimate structure is the key advantage of the CMNF.
4.3. Computer Simulations
In each of the performed computer computations, we simulated two independent beams of trajectories of the observation system (12)–(14) and CMNF estimates (9). On the first beam, the filter parameters were calculated according to the formulas in (10) and their accuracy according to Formula (11). Accordingly, the statistical average replaced mathematical expectations according to the Monte Carlo method. On the second beam, the actual quality of the CMNF estimate was evaluated. The mean square deviations of the estimate errors determine the estimation accuracy of the coordinates of the AUV position. These values, denoted by , were calculated from the second beam of trajectories, and can be called practical accuracy.
The values and represent the theoretical accuracy of the CMNF estimate. We calculated these values using Formula (11) and compared them with and respectively.
Calculations were performed for two variants of maneuvering speed (let us call them, conditionally, a maneuver of km/h and a maneuver of km/h) and two correction options: the main (17) and the residual (15). For a qualitative assessment of the results, each of the calculations was repeated under the assumption that , i.e., in a model that does not consider the observation delays. The following series of figures illustrate the results.
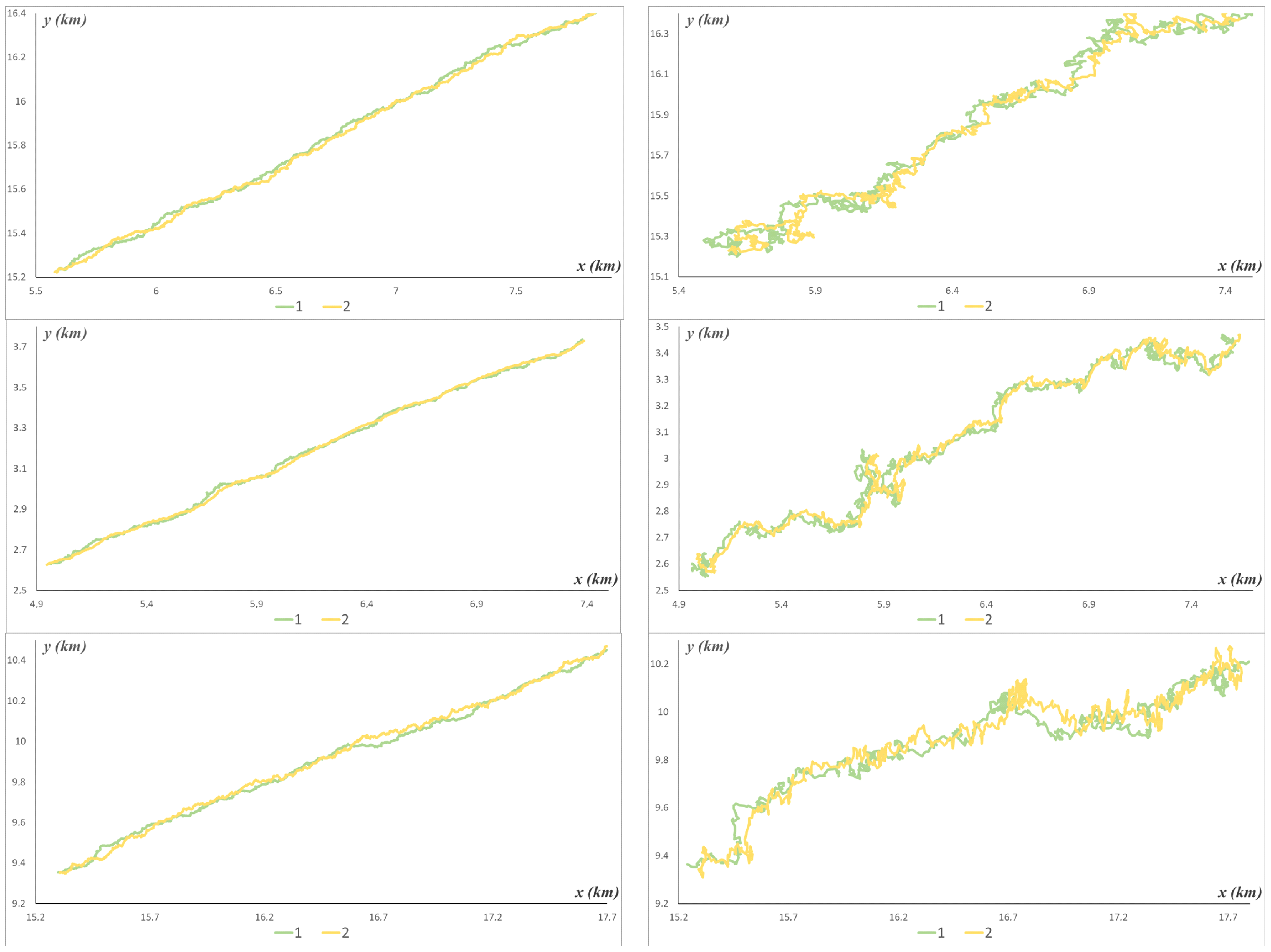
Figure 2 shows several AUV trajectories
for a maneuver of
km/h (left) and a maneuver of
km/h (right), and the corresponding CMNF estimates
calculated using correction (17). This figure and the following ones show the same trajectories from the simulated beam, i.e., the same set of random variables forms the states and estimates, and the difference is only in the value of the model parameters (in
Figure 2, these parameters are variances of
and
). This figure gives a qualitative idea of the filtering results and explains why the trajectories for a maneuver of
km/h are more interesting to study.
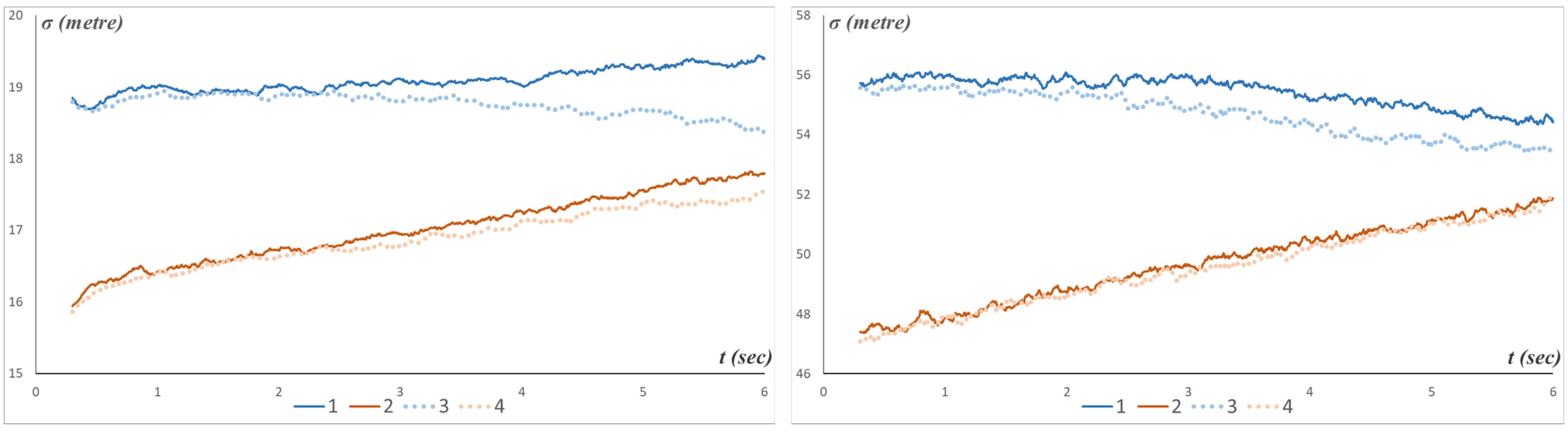
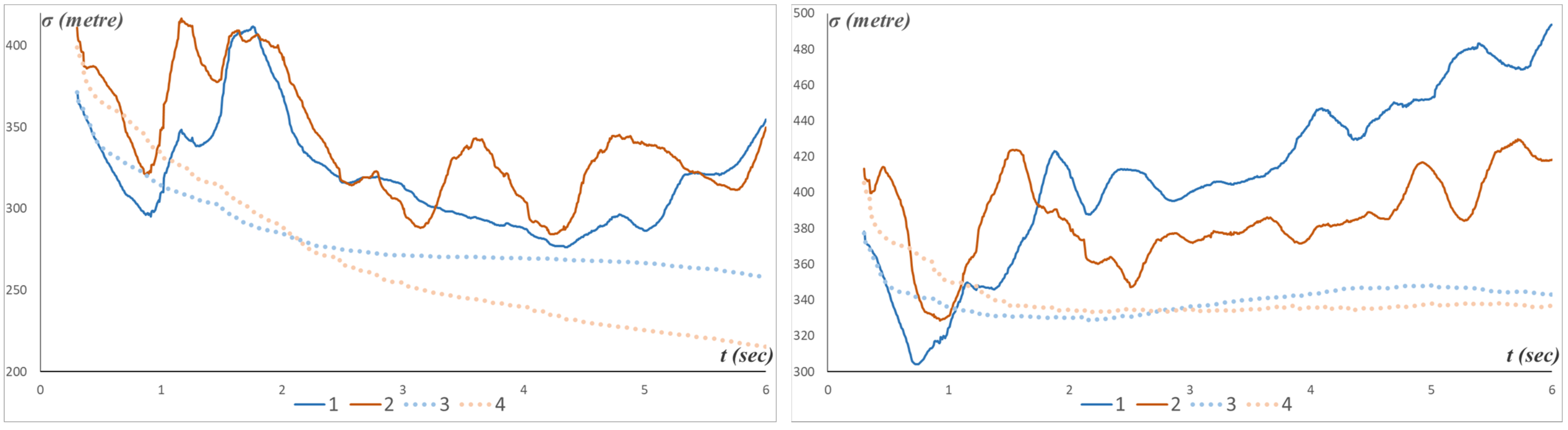
A formal analysis of filtering quality is presented in
Figure 3. This figure gives quantitative estimates of the effectiveness of target tracking, shows the extent of deterioration in the quality of estimates between a maneuver of
km/h and a maneuver of
km/h, and also confirms the applicability of the Monte Carlo method for the practical synthesis (training) of CMNF, since the theoretical and practical accuracy are very close.
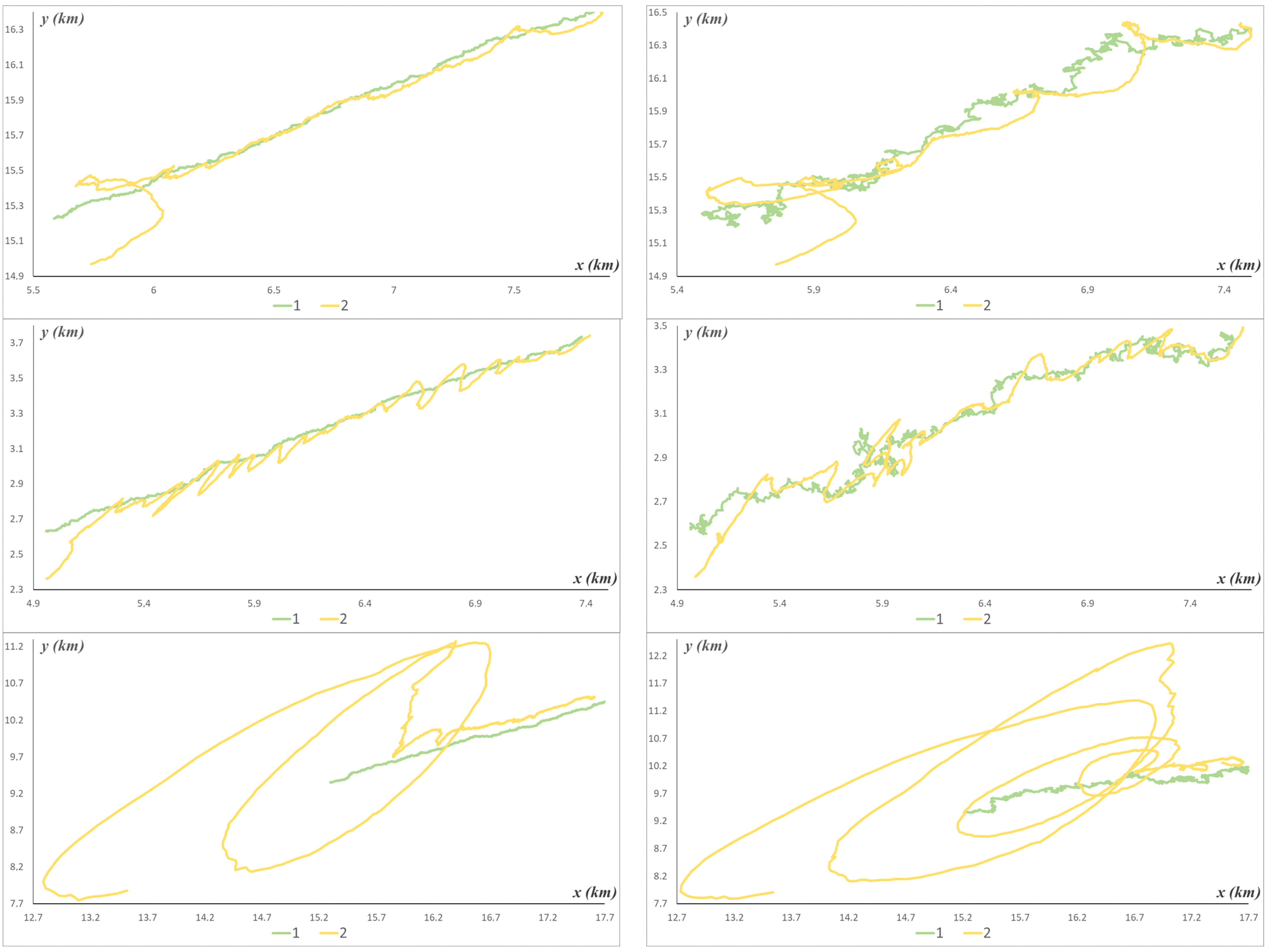
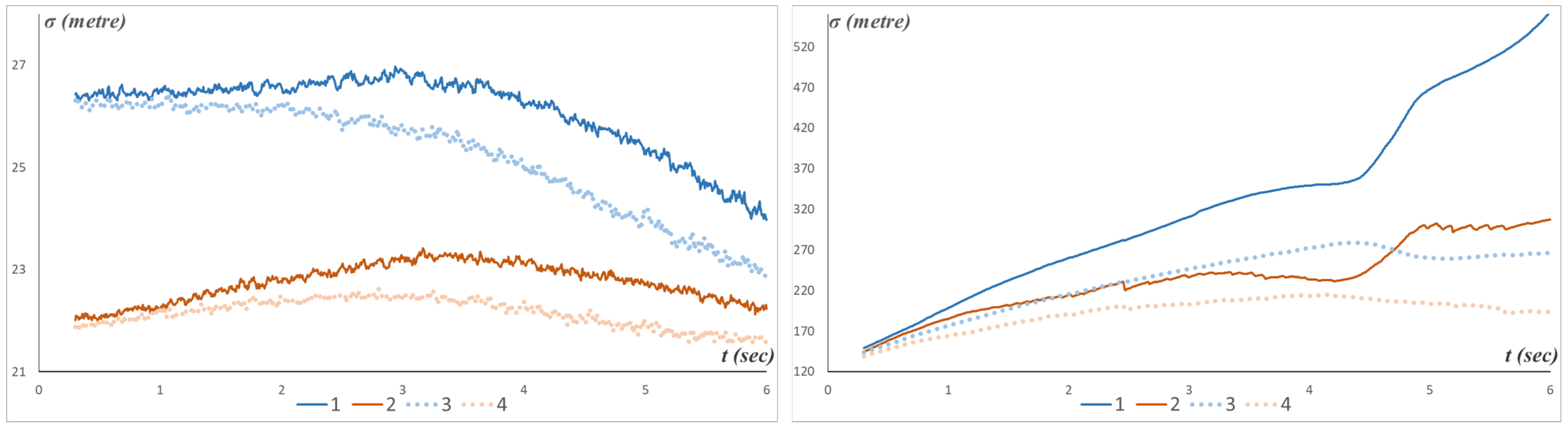
The same illustrations, as shown in
Figure 2 and
Figure 3, are repeated in the following
Figure 4 and
Figure 5 with a single change: instead of correction (17), we use the correction (15). These figures support the above statement about the correction in the form of a residual that is not very suitable for the model under consideration. Not only did the filtering quality turn out to be very low, but the difference between the theoretical and practical accuracy of the CMNF is also unacceptably large. The latter circumstance can be dealt with by increasing the size of the training beam used for approximate calculations using Formula (10), but it is impossible to improve the quality compared to the theoretical ones
and
in any case.
The last group of figures is given in order to illustrate the influence of the main factor of the model proposed here: the delay of observations
. We should immediately note that it is not advisable to consider figures of both variants of the maneuver, so for graphical presentations, we have limited ourselves to only the maneuver of
km/h, as it is more beautiful. Accordingly, the same trajectories and the exact figures above are given to compare corrections (15) and (17).
Figure 6 shows the trajectories, and
Figure 7 illustrates the filtering accuracy.
These visual and quantitative figures illustrate the real difference between models with and without observation delays. Nevertheless, they also show that the quality of a universal filter with a simple correction that needs to consider the specifics of the movement observation model needs to be higher. Of course, as seen in
Figure 7 on the right, the difference between the theoretical and practical accuracy of the CMNF estimates will disappear as the size of the training beam increases. However, the absolute advantage of the “smart” correction will remain.
Finally, the calculations’ results are presented in tabular form. Namely,
Table 1 shows the average values of the quality indicators for all sets of parameters. The average value is understood as averaging over time, for example
, etc.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}