Abstract
Unmanned aerial vehicles (UAVs) are valued in 5G and 6G networks due to their communication capabilities, low cost, and flexible deployment. Recently, UAV-aided emergency networks in disasters have been designed where one single large UAV is used. Compared with a single large UAV, Flying Ad Hoc Networks (FANETs) with small UAVs have many benefits. Therefore, instead of a single large UAV, a FANET is proposed in this paper. To take full advantage of their services, UAVs must be able to communicate efficiently with each other and with existing networking infrastructures. However, high node mobility is one of the main characteristics of FANETs, which can result in rapid topology changes with frequent link breakage and unstable communications that cause collision and packet loss. As an alternative, networks can be broken up into smaller groups or clusters to control their topology efficiently and reduce channel contention. In this study, a novel cluster-based mechanism is proposed for FANETs. The process of cluster management is described. The IEEE 802.11 backoff method is specifically intended for direct communications and is not appropriate for cluster-based communications. Therefore, a new backoff mechanism is proposed based on cluster size to optimize performance. An analytical study using the Markov chain model is presented to explore the performance of the proposed mechanism. The study takes into account Nakagami-m fading channels. Performance-influencing parameters are taken into consideration and the relationships among these parameters as well as performance metrics such as throughput, packet dropping rate, outage probability, and delay are obtained. Furthermore, simulation results are provided which verify the analytical studies. A quantitative comparison with current cluster-based methods is also presented. The simulation results show that the suggested technique enhances system performance and complies with the safety message delay constraint of 100 ms.
1. Introduction
Drones, also familiarly known as unmanned aerial vehicles (UAVs), have been the focus of recent studies due to their autonomy, adaptability, and the wide variety of the relevant application sectors [1,2,3]. In fact, UAVs have been seen as key enablers for a number of applications, including the military, telecommunications, surveillance and monitoring, delivery of medical supplies, disaster management, and search and rescue missions [4,5,6,7,8,9,10]. Beyond 5G and 6G wireless networks are expected to play a significant role in accommodating the widespread and rapidly expanding usage of UAVs across a wide variety of applications during the next decade [11,12,13,14,15,16,17]. The goal of the next generation of wireless networks, which is to reach 6G, is to provide users with seamless, instantaneous, high-definition, and always-on connectivity. In terms of reliability, data rate, latency, and energy efficiency, connected devices and automation systems like autonomous cars and UAVs have high expectations for what 6G will deliver. This includes a full-fledged architecture with integrated terrestrial/non-terrestrial networks [18]. UAVs play pivotal roles in a broad variety of use cases and situations that potentially extend beyond 5G and 6G. Package delivery, real-time surveillance, media creation, and remote construction are all examples of uses for UAVs. There has been a dramatic increase in the use of UAVs.
After natural and other disasters such as earthquakes and floods, a lot of time is spent to rearrange the network in case of a multi-faceted problem that may occur in communication systems and saving people’s lives is the utmost important thing. Rapid and efficient search and rescue efforts are urgently needed in such a scenario. For an expedient response in this kind of crisis, the first 72 h are the most critical, and this can only be achieved by efficient search-and-rescue efforts. However, these efforts will be hampered by a disruption in publicity and communication. Recently, UAV-aided emergency networks in disasters have been designed in [19], where one large UAV is used. Ad hoc networks with small UAVs have significant benefits over a single big UAV [20,21,22,23]. First, compared to a big UAV, the cost of construction and maintenance is far cheaper. Second, a multi-UAV system has a significantly greater chance of survival than a single huge UAV, which would cause the mission to be interrupted (because of the weather or any UAV system malfunction). Thirdly, a system with several UAVs is more scalable. Blind spots can be removed, and operating coverage can be simply enhanced by introducing more UAVs. Multi-UAV systems organized in an ad hoc fashion are called UAVs ad hoc networks, which are known as flying ad hoc networks (FANETs) too. Therefore, instead of a single large UAV, FANETs will be used as shown in Figure 1. In each cluster there will be a cluster head (CH) which will be connected to the emergency communication vehicle (ECV). CH will be responsible for coordinating communication between cluster members (CMs) within the cluster, and outside through the ECV. The CH serves as the entry point for all types of communication that take place between clusters, inside the cluster, and outside.
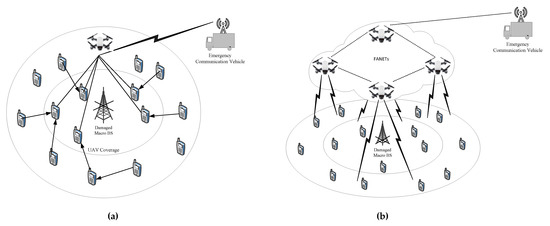
Figure 1.
System model: (a) Existing situation; (b) Proposed situation.
UAVs must be able to interact effectively with one another and with existing networking infrastructures to fully benefit from these services [24]. There are two communication challenges—large communication distance, and high node mobility [1]. On the other hand, UAVs can be organized in various clusters, where for each there will be a CH. The base station will then be connected via a chain created by these CHs. In addition, one of the primary features of FANETs is high node mobility, which can lead to quick topology changes, frequent connection failure, and shaky communications that result in collision and packet loss. As an alternative, clustering into tiny groups can effectively manage the network architecture and reduce channel contention [25]. Clustering can reduce delay, a crucial performance factor as some safety messages would expire if they were not delivered on time. The contention-based architecture of the random access strategy causes a significant increase in delay in high-density networks. However, channel contention may be reduced, and fair channel access can be provided inside the cluster thanks to clustering.
To have efficient and reliable communication in FANETs, there are certain performance requirements such as the delay requirement of control or safety messages (SMs) being 100 ms [22,26,27]. SMs are used to transmit time-sensitive data such as control commands, collision avoidance instructions, etc. These communications fall under the category of “delay-sensitive” messages. If there is a delay or packet loss the task will fail, or the drone will crash. Video, still images, temperature readings, air pressure readings, infrared data, and so on, are examples of communications that may tolerate increased latency or packet loss within a given range. These types of data are non-safety messages (NSMs). Recently, a cluster-based mechanism for FANETs has been proposed in [28,29] which can not fulfill the delay performance requirement of 100 ms. In [28], to have a stable cluster, periodic advertisement messages are broadcast, and a list of neighboring nodes is maintained which degrades performance because the network is busy exchanging advertisement messages. The CH broadcast advertisement messages to communicate with CMs. In [29], it is assumed that a CH is travelling in the FANET at a similar speed as its neighbors. The UAV that has the lowest velocity in the direction of its neighbors is chosen as the CH. However, [29] suffers from low throughput and high delay. Like other ad hoc Networks, the performance of FANETs is related to the employed medium access control (MAC) protocol directly [30]. The MAC and physical (PHY) layers specifications are provided by the IEEE 802.11-2020 standard [31].
The contributions of this study are outlined below. In this paper, an architecture for emergency communication systems in disasters through FANETs is proposed. Compared to [19], in our architecture we used FANET instead of a single UAV, which is presented in Figure 1. To have efficient and reliable communication, a novel cluster-based mechanism is proposed for FANETs. The process of cluster management is described. For the FANET to be stable and reliable, the cluster structure must be maintained. In each cluster, there will be a backup CH (CHB) among the CMs, such that if the CH disappears, the CHB will become the new CH. The election processes for CH and CHB are presented. The traditional IEEE 802.11 backoff method is specifically intended for direct communication which is not appropriate for communication in cluster-based systems. Thus, a new backoff mechanism is proposed based on cluster size to optimize performance. The effectiveness of the suggested mechanism is investigated analytically using the Markov chain model. The analysis takes into consideration Nakagami-m fading channels. Throughput, packet dropping rate (PDR), outage probability, and delay expressions are obtained by taking into account the performance-influencing variables and establishing the relationships between them. Furthermore, simulation results are provided which verify the analytical studies. The simulation results indicate that the suggested technique enhances system performance and complies with the safety message delay constraint of 100 ms. A quantitative comparison with current cluster-based methods is also presented. In comparison to current cluster-based systems, the proposed approach achieves significant achievements with higher throughput and lower delay.
2. Proposed Architecture
In this section, the proposed architecture will be described. Firstly, the cluster formation mechanism will be defined. Then, the safety messages transmission method will be presented. Finally, a new back-off mechanism based on the IEEE 802.11 standard will be provided. Table 1 provides a list of acronyms that are used.

Table 1.
A list of acronyms that are used.
2.1. Cluster Formation
It is assumed that each UAV is aware of its speed and location. The integrated global positioning system (GPS) can provide the location details and speed. The cluster formation mechanism is shown in Figure 2. A cluster can be formed by grouping adjacent UAVs.

Figure 2.
Cluster formation.
A CH will be selected from each cluster to manage communication amongst CMs, both inside and outside the cluster. All types of intra- and inter-cluster communication use the relevant CH as their entry point. The CH also regulates cluster membership and cluster creation. In order to facilitate communication in clusters, additional control packets are developed, which are: RTJC (Request To Join in the Cluster); ATJC (Acceptance To Join in the Cluster); RTBCH (Request To be a Backup Cluster Head); and RTM (Request To Merge). Figure 3 presents the format of the new control packets. RTJC packet consists of frame control, duration, transmitter address (TA), cluster information (CI), and frame check sequence (FCS). ATJC packet consists of frame control, duration, receiver address (RA), cluster ID (CID), cluster head address (HA), cluster member ID (MID), and FCS. RTBCH packet consists of frame control, duration, CID, RA, TA, minimum distance (dmin) between CM and CH, and FCS. RTM packet consists of frame control, duration, CID, HA, the number of CMs (NM), and FCS. The details of the mechanism will be provided in this section.
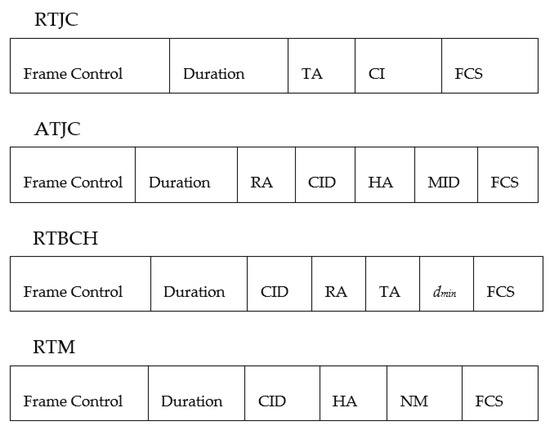
Figure 3.
The format of the introduced control packets.
2.1.1. Cluster Membership
A UAV will join a cluster once it has been deployed in a certain area. RTJC will be broadcast across the network by the UAV. The RTJC is a control packet which includes a field of cluster information (CI) that is needed to join a cluster. CI is added to know whether any cluster exists or not. CI indicates that the transmitting UAV is not in a cluster and wants to join a cluster. If a cluster is present, the CH will send ATJC to the UAV while allocating a cluster member ID (MID). Cluster ID (CID), cluster head address (HA), and the newly allocated MID are all included in ATJC. If the UAV receives multiple ATJCs, the UAV will become a CM of the cluster from which the ATJC is received firstly and will send a rejection message to the others. If there are fewer UAVs in a cluster, the message delay will be reduced. Becoming a CM entails joining the cluster from which the ATJC came with the shortest latency, potentially due to a lower number of CMs. Then, the CH broadcasts to all CMs after updating the list of CMs. Without receiving an ATJC, the UAV will not become a member of any cluster and will have a short inter-frame space (SIFS) timeout. The UAV will then create a new cluster and assign a new cluster ID while acting as the CH. New cluster information will then be disseminated throughout the network.
2.1.2. Selection of the CH and CHB
After broadcasting an RTJC, if any UAV fails to receive an ATJC or the SIFS interval timeout occurs, the UAVs will create a cluster. The UAV itself will serve as the CH. If a cluster already exists and the UAV obtains ATJC, it will become a CM of the cluster. The cluster structure must be maintained in order for the FANET to be stable and reliable. There will be a CHB in each cluster with enough CMs. If the CH disappears for any reason, the CHB will become the CH and a new CHB will be defined. To elect a CHB in the cluster, each CM will send RTBCH where the minimum distance (dmin) between that CM and CH will be added. The dmin can be obtained using Equation (3), where the starting point is the location of the CM, and the destination point is the location of the CH. The CM that has the minimum distance will become the CHB.
2.1.3. Leaving Process
The CM lists must be realistic and regularly revised. As a new CM links to or departs the cluster, the list of CMs will be dynamically updated to reflect the change. Both a CM and the CH can initiate the process of that CM leaving the cluster. From the CH’s perspective, the steps for a CM exiting the cluster are as follows: After sending an SM to a CM, the CH will wait for an ACK until the SIFS timeout has passed. If no ACK has been received until the timeout, the CH will transmit the SM again and wait for an ACK or the SIFS timeout. If it does not receive an ACK within the specified amount of time, the CM will no longer be considered to be within the CH’s range of transmission. The CH will remove it from the CM list and announce its deletion to the network. The steps used by a CM to exit the cluster are as follows: After sending an SM to the CH, the CM waits for ACK. If the CM does not receive an ACK within the SIFS duration, it retransmits the SM. After another SIFS duration, if an ACK is not received by the CM, then it leaves the cluster.
2.1.4. Merging Process
Two or more CHs will combine if they and their CMs are under the same network coverage. A CH becomes aware that there are other CHs operating within the coverage of the same network when it receives control messages from another CH, such as a CM list message. If the CH has coverage for all listed CMs, then RTM will be broadcast by the CH with its CMs list. The RTM control packet includes the number of CMs (NM) of that cluster field. Other CH will check coverage for all listed CMs. If the other CH also has coverage for all listed CMs, then it will broadcast its own RTM after receiving the RTM. The CH and CHB with the highest NM during cluster merging will continue to be the CH and CHB. The cluster will welcome more CHs and CMs as CMs. The CH of the combined clusters then broadcasts an update to the list of CMs to all CMs.
2.2. Safety Messages Transmission
The algorithm of SM transmission is given in Algorithm 1. Let UACK be the set of acknowledgment NACK where ACK is sent by the Nth CM after successful transmission. The number of elements in UACK is equal to the number of CMs. The symbol ϯre denotes retransmission and ϯmax is the maximum retransmission limit. The most important messages in FANETs, which must have rigorous delay requirements, are the SMs. The CH sends out an SM and waits for all CMs to respond with an ACK. The transmission is deemed successful if an ACK is obtained from each and every CM. However, if an ACK has not been received from a CM or waiting time (Twait) is equal to the SIFS duration (TSIFS), then the transmission to that CM has failed. When the number of retransmissions (ϯre) is lower than or equal to the maximum retransmission limit (ϯmax), the SM will be resent to the CMs whose ACKs have not been received. Otherwise, the SM transmission to the CM will be abandoned, and that CM will cease to be a member of the relevant cluster.
| Algorithm 1. Algorithm of SM Broadcast |
| 1. SM is broadcast by CH 2. Wait for ACK, or, Twait = TSIFS 3. IF NACK ∈ UACK for all CMs 4. Then the transmission is successful 5. End 6. ELSE IF NACK ∉ UACK and ϯre ≤ ϯmax 7. Then CH retransmits to the CM 8. ELSE Discard 9. End |
2.3. Backoff Mechanism
The goal is to create a dynamic backoff technique for IEEE 802.11 that proactively modifies the contention window (ҨC) in response to changes in the network load. Fixed ҨC backoff techniques estimate the ҨC without considering the state of the network. As a result, the ҨC must increase for each collision to achieve successful broadcasts. However, when the network load changes to heavy/light, success/collision is not guaranteed, and this dramatic volatility in the ҨC influences how well the backoff algorithms operate [32]. The ҨC is proposed in accordance with the number of CMs in the cluster to solve this issue.
Let NUAV be the number of UAVs in the FANET. If NCL clusters are formed in the network, the mean number of UAVs in a cluster may be calculated as:
Therefore, the optimal ҨC for a cluster size X can be given as [25]:
In [32], an adaptive backoff mechanism is suggested for wireless local area networks (WLANs) and showed a better performance. In this paper, the adaptive backoff technique is used for the cluster-based mechanism. The optimal ҨC depends on the mean number of UAVs in a cluster, as per given in Equation (2). The proposed backoff mechanism is presented in Algorithm 2. Let denote a channel and i denote an idle channel. TDIFS is the duration of the DCF inter-frame space (DIFS). When a UAV has an SM to transmit, it first senses . If is idle and continues to be idle for a TDIFS duration, then the UAV transmits the SM. Otherwise, backoff is initiated randomly with a value from 0 to (ҨC-opt–1). Backoff is reduced by 1 when the channel is idle in a slot time, and the existing backoff value remains when the channel becomes busy and decremented when the channel is idle once more for a higher duration than TDIFS. The packet will be sent when backoff is 0.
| Algorithm 2. Algorithm of the Proposed Backoff Mechanism |
| 1. IF = i 2. Twait = TDIFS and still = i 3. Broadcast 4. END 5. IF Twait > TDIFS 6. backoffi = [0, ҨC-opt − 1] 7. While backoffi > 0, continue to sense the channel, do 8. IF = i in a slot 9. backoffi = backoffi − 1, 10. ELSE backoffi = backoffi 11. END 12. END 13. While backoffi = 0 do 14. Broadcast 15. END |
3. Performance Analysis
This section develops a mathematical model for evaluating the proposed mechanism’s performance.
3.1. Network Model
Due to their ability to navigate in three dimensions (3D), UAVs may easily avoid obstructions in their path. Figure 4 depicts movement in a 3D environment. It is assumed that the height h will remain constant for the duration of the period T. The UAV’s position is expressed as (x(t), y(t), h), where x(t) and y(t) are time-varying x and y coordinates. Launch and recovery sites, or pre- and post-mission locations, determine the UAV’s precise locations. Let (xs, ys, h) denote the starting point and (xd, yd, h) the destination. The distance from the starting point to the destination will be denoted by d. The minimum d between the starting point and the destination point can be given as:
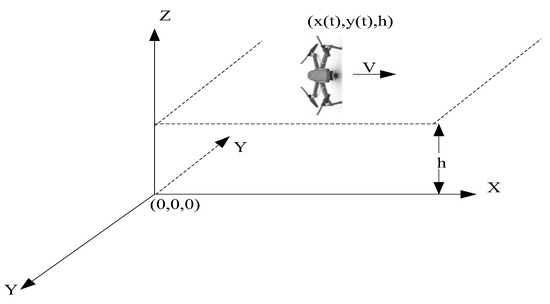
Figure 4.
Movement in a 3D environment.
The UAV can reach a maximum speed of . Therefore, there is at least one trajectory that goes from the starting point to the destination point.
Each cluster will have one CH, and as a result, there are NCL number of CHs. The expression for the average number of CMs in a cluster is:
The probability that a CM will send a packet in a specific slot is ∆, which can be expressed as:
The probability of an idle channel is denoted by ϕ and can be written as:
Ψ is the probability that at least one CM is transmitting on channel at any given slot. There are (X–1) CMs contending for the channel, thus, Ψ can be given as:
ζ is the probability that a sent packet will be collided. When one of the remaining (X − 2) CMs transmits a packet within the same time slot, a collision will occur. ζ can be given as:
η is the probability that the existing packet delivery on the channel will be successful, and it can be given as:
Using a Poisson process with an arrival rate of λa, we can calculate the probability of a packet’s arrival σ as:
where a UAV’s expected time in each Markov state is denoted by Tɛ. Tɛ can be given as:
where Tslot is the period of a slot, TS is the interval of a successful packet transmission, and TC is the duration of a packet transmission with a collision. TS and TC can be given as:
where L is the packet size, Lh is the MAC and PHY headers’ length, and Rd is the data transmission rate. TACK and Tdelay are the duration of the ACK and propagation delay, respectively.
3.2. Outage Analysis
The Nakagami-m fading channel model is a more general distribution than the Rayleigh and Rician fading models; it is a channel model that characterizes fast fading at long distances. Since it is the Nakagami-m distribution, the probability density function (pdf) of the SNR can be given as follows:
where m denotes the shape parameter of the distribution and expresses the Gamma function, and . E[.] denotes the expectation operator. The probability that the average SNR of the received signal will fall below the SNR threshold is known as the outage probability (), which can be calculated as follows [33]:
After some simplification [33],
where Gt and Gr denote the antenna gain for the transmitter and the receiver, respectively. λ is the wavelength of the signal (c = 3 108 m/s, is the light speed, and f = 5 GHz, is the carrier frequency). σR and d represent the transmission power at the receiver and the distance between transmitter and receiver, respectively. The transmitted power of all UAVs is the same. The parameter α expresses the exponent of path loss. indicates the additive white Gaussian noise (AWGN). Block fading patterns, in which a packet to be delivered is divided into B blocks, are taken into account in order to account for effect of fading. is the probability of an error frame, and the relationship between and is the following [34],
3.3. Throughput Analysis
Let μ represent the normalized system throughput, which is calculated as the ratio of the average transmitted payload length to the average slot time duration. For the kth cluster, the μ can be calculated as:
Using Equation (6) to Equation (9) in Equation (19), we can obtain:
μ can be given as:
3.4. PDR Analysis
After the maximum number of retransmits when transmission is unsuccessful, a packet will be dropped. Packet dropping rate (PDR) can be given as:
3.5. Delay Analysis
There are two possible outcomes: either the packet will be lost due to collision, or it will be successfully sent if there is no collision. The delay time associated with a lost packet is not factored into the computation of the average delay. Let Ω represent average packet delay, or the time it takes for a successful transmission, which may be given as:
where Θ is the probability that a packet will ultimately be dropped. E[Tint] is the average time of the mean packet interval between two successfully received packets at a single receiver, and E[Tdr] is the average time of a dropped packet. E[Tint] can be obtained by using Equation (11) as:
E[Tdr] can also be given using Equation (11) as:
where E[Sdr] is the average slot time for the dropped packet and can be expressed as:
Therefore, using from Equations (24)–(26) in Equation (23), Ω can be obtained as:
4. Simulation Results
In this section, the proposed system is evaluated, and the analytical study is justified through Monte Carlo simulations. The simulations are performed in MATLAB. The results of the simulation are attained by 1000 Monte Carlo iterations. The proposed system and the traditional system that is based on the IEEE 802.11 standard are compared. A quantitative comparison with current cluster-based methods is also provided. Table 2 lists the values of the parameters utilized in the simulations.
Table 2.
Values of the Parameters Utilized in the Simulation.
Throughput is shown against the number of UAVs (NUAV) in Figure 5 where the cluster size is 10. It is clear that the proposed system’s throughput has significantly improved, as compared to the traditional system. The throughput increases as NUAV increases within a specific range, since fewer collisions would occur. However, as NUAV increases, more packets will compete for transmission, increasing the collision probability and reducing throughput.

Figure 5.
Throughput versus the number of UAVs.
The throughput for 50 UAVs with cluster sizes of 3, 5, and 10 is shown in Figure 6, where the cluster size indicates the number of UAVs in the cluster. The cluster formation is heterogeneous. A homogeneous FANET consists of the same size of clusters, while a heterogeneous FANET consists of two or more sizes of clusters. The result of a homogeneous FANET is shown in Figure 5. The Figure 6 explains the scenario of cluster sizes 3, 5, and 10 in the FANET, and shows the results for individual cluster sizes. There are 5 clusters with a cluster size of 3, 3 clusters with a cluster size of 5, and 2 clusters with a cluster size of 10 for 50 UAVs in the FANET. System performance is dependent on the cluster size, just as packet loss, channel contention, and collision probability, are all influenced by the number of UAVs in the cluster. When a cluster is too big, there would be a lot of packet collisions among a lot of UAVs, which would drastically lower the performance of the system. A broad geographic region may also result in a high rate of unsuccessful transmissions. On the other hand, a tiny cluster would not be able to fully make use of the existing radio facilities, since there would not be enough UAVs there to create enough traffic.

Figure 6.
Throughput against number of UAVs under different cluster size.
Figure 7 presents the PDR against the number of UAVs. When a transmission attempt fails, a packet will be discarded after the maximum number of retries. The PDR of the proposed system is significantly lower than the traditional system for the same retransmission limit, indicating that the proposed system is more reliable than the traditional system for the same retransmission limit. The proposed system has a lower PDR than the traditional ones because clustering reduces channel contention, which enables stable communication.

Figure 7.
PDR against number of UAVs.
The average packet delay vs. the number of UAVs is shown in Figure 8. The average packet delay increases as the number of UAVs increases, because the probability of a collision increases. However, the proposed system complies with the constraint of 100 ms latency for SMs, and SM transmission delays are always lower than those of the traditional system.

Figure 8.
Average delay versus the number of UAVs.
Figure 9 shows the outage probability of the proposed system versus the SNR for different values of m. The outage probability falls as the SNR rises because signal strength increases with the increase in SNR. The figure also contains m = 1 for comparison. The Nakagami-m model depicts the Rayleigh fading when m = 1. Nakagami-m channels can provide greater-order diversity gains compared to Rayleigh fading channels. When the SNR is less than 5 dB, the outage performance for m = 1 and m = 2 seems identical. It appears that the probability of outage can be reduced by raising m. Figure 10 shows the throughput against NUAV for various channel types. The Nakagami fading-m channel (m = 2) system has a higher throughput than the Rayleigh fading channel system. As m increases, the bit error rate (BER) decreases. A decrease in BER reduces the error frame transmission, thus increasing throughput and decreasing the outage probability.

Figure 9.
Outage probability versus SNR.

Figure 10.
Throughput versus the number of UAVs under different fading channels.
The maximum throughput versus the number of UAVs achieved under the same network model in current cluster-based systems is approximately 10 Kbps in [28]. On the other hand, the maximum throughput of the proposed approach is around 16 Mbps. There is no throughput analysis in [27]. Although both [27] and [28] provide a delay analysis, they are unable to meet the rigorous 100 ms delay criteria. Finally, it is evident that the suggested system fulfills the 100 ms delay constraint in addition to achieving high throughput and low PDR.
5. Conclusions
In this study, an architecture for emergency communication systems in disasters based on FANETs is proposed. To have efficient and reliable communication, a novel cluster-based mechanism is proposed for FANETs. The process of cluster management is described. The traditional IEEE 802.11 backoff method is specifically intended for direct communications and is not appropriate for cluster-based communications. Thus, a new backoff mechanism is proposed based on the cluster size to optimize performance. An analytical study using the Markov chain model is provided to evaluate performance of the proposed mechanism. In the analysis, Nakagami-m fading channels are considered. Performance-influencing variables are taken into consideration and the relationships among these variables, as well as performance expressions such as throughput, PDR, outage probability, and delay are obtained. Furthermore, simulation results are provided which verify analytical studies. The simulation results indicate that the proposed system fulfills the 100 ms delay constraint in addition to achieving high throughput and low PDR. The proposed system is demonstrated to be superior to existing methods, via a quantitative comparison with the current cluster-based approaches. Since performance is influenced by cluster size, performance may be improved by adjusting the cluster size. A comprehensive performance study and optimization of the system that has been proposed entail future research works.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
There is no conflict of interest with any person/institution in this article.
References
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Guo, J.; Gao, H.; Liu, Z.; Huang, F.; Zhang, J.; Li, X.; Ma, J. ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. Early Access 2022, 1–14. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, J.; Huang, F.; Cai, D.; Wu, Y.; Chen, X.; Igorevich, K.K. Lightweight Trustworthy Message Exchange in Unmanned Aerial Vehicle Networks. IEEE Trans. Intell. Transp. Syst. 2021, 1–14. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, B.; Zhao, H.; Zhang, J.; Zhou, L.; Ma, D.; Wei, J.; Leung, V.C. Joint Resource Allocation on Slot, Space and Power towards Concurrent Transmissions in UAV Ad Hoc Networks. IEEE Trans. Wirel. Commun. 2022, 21, 8698–8712. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the IEEE International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar]
- Han, J.; Wei, Z.; Ma, L.; Jiang, W.; Pan, C.; Wang, Y. A Multiple Access Method for Integrated Sensing and Communication Enabled UAV Ad Hoc Network. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 184–188. [Google Scholar]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile unmanned aerial vehicles (UAVs) for energy-efficient Internet of Things communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Yaliniz, I.B.; Yanikomeroglu, H. The new frontier in ran heterogeneity: Multi-tier drone-cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef]
- Singh, D.; Swaminathan, R. Comprehensive Performance Analysis of Hovering UAV-Based FSO Communication System. IEEE Photonics J. 2022, 14, 7352013. [Google Scholar] [CrossRef]
- Swaminathan, R.; Sharma, S.; Vishwakarma, N.A.; Madhukumar, S. HAPS-Based Relaying for Integrated Space–Air–Ground Networks With Hybrid FSO/RF Communication: A Performance Analysis. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1581–1599. [Google Scholar]
- Shah, S.; Siddharth, M.; Vishwakarma, N.; Swaminathan, R.; Madhukumar, A.S. Adaptive-Combining-Based Hybrid FSO/RF Satellite Communication With and Without HAPS. IEEE Access 2021, 9, 81492–81511. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Khalighi, M.A. Channel Modeling and Parameter Optimization for Hovering UAV-Based Free-Space Optical Links. IEEE J. Sel. Areas Commun. 2018, 36, 2104–2113. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Ansari, I.S. Tractable Optical Channel Modeling Between UAVs. IEEE Trans. Veh. Technol. 2019, 68, 11543–11550. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Rezaee, M.; Ansari, I.S.; Yazdanian, V. Channel Modeling for UAV-Based Optical Wireless Links With Nonzero Boresight Pointing Errors. IEEE Trans. Veh. Technol. 2020, 69, 14238–14246. [Google Scholar] [CrossRef]
- Shah, A.F.M.S.; Karabulut, M.A. Reliability estimation for drone communications by using an MLP-based model. Int. Adv. Res. Eng. J. 2022, 6, 5170. [Google Scholar] [CrossRef]
- Shah, A.F.M.S. A Survey from 1G to 5G Including the Advent of 6G: Architectures, Multiple Access Techniques, and Emerging Technologies. In Proceedings of the IEEE 12th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 26–29 January 2022; pp. 1117–1123. [Google Scholar]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R.; Wong, K.K. UAV-Assisted Emergency Networks in Disasters. IEEE Wirel. Commun. 2019, 26, 45–51. [Google Scholar] [CrossRef]
- Kim, G.H.; Nam, J.C.; Mahmud, I.; Cho, Y.Z. Multi-drone control and network self-recovery for flying ad hoc networks. In Proceedings of the IEEE Eighth International Conference on Ubiquitous and Future Networks (ICUFN), Vienna, Austria, 5–8 July 2016; pp. 148–150. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, S. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C.; Han, Z.; Ren, Y.; Maunder, R.G.; Hanzo, L. Taking Drones to the Next Level: Cooperative Distributed Unmanned-Aerial-Vehicular Networks for Small and Mini Drones. IEEE Veh. Technol. Mag. 2017, 12, 73–82. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Shah, A.F.M.S.; Ilhan, H.; Tureli, U. CB-MAC: A novel cluster-based MAC protocol for VANETs. IET Intell. Transp. Syst. 2019, 13, 587–595. [Google Scholar] [CrossRef]
- Yang, G.; Lin, X.; Li, Y.; Cui, H.; Xu, M.; Wu, D.; Rydén, H.; Redhwan, S.B. A telecom perspective on the Internet of drones: From LTE-advanced to 5G. arXiv 2018, arXiv:1803.11048. [Google Scholar]
- Shah, A.F.M.S.; Ilhan, H.; Tureli, U. Designing and Analysis of IEEE 802.11 MAC for UAVs Ad Hoc Networks. In Proceedings of the IEEE 10th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 10–12 October 2019; pp. 934–939. [Google Scholar]
- Bhandari, S.; Wang, X.; Lee, R. Mobility and Location-Aware Stable Clustering Scheme for UAV Networks. IEEE Access 2020, 8, 106364–106372. [Google Scholar] [CrossRef]
- Pandey, A.P.; Shukla, K.; Agrawal, R. Salp Swarm Optimization-Based Clustering Algorithm (SSOCA) in Adaptive FANET to Improve QoS for Disaster Response Operations. Wirel. Pers. Commun. 2022, 126, 2801–2824. [Google Scholar] [CrossRef]
- Shah, A.F.M.S.; Ilhan, H.; Tureli, U. qCB-MAC: QoS aware cluster-based MAC protocol for VANETs. In Advances in Intelligent Systems and Computing; Arai, K., Kapoor, S., Bhatia, R., Eds.; Springer: Cham, Switzerland, 2019; Volume 857, pp. 685–695. [Google Scholar]
- IEEE Standard for Information Technology. Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks--Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. In IEEE Standard 802.11-2020 (Revision of IEEE Standard 802.11-2016); IEEE: Piscataway, NJ, USA, 2021; pp. 1–4379. Available online: https://ieeexplore.ieee.org/document/817038 (accessed on 30 November 2022).
- Syed, I.; Roh, B.H. Adaptive backoff algorithm for contention window for dense IEEE 802.11 WLANs. Mob. Inf. Syst. 2016, 2016, 8967281. [Google Scholar] [CrossRef]
- Simon, M.K.; Alouini, M.S. Digital Communication over Fading Channels, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2015; pp. 253–257. [Google Scholar]
- Karabulut, M.A.; Shah, A.F.M.S.; Ilhan, H. A Novel MIMO-OFDM Based MAC Protocol for VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20255–20267. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).