1. Introduction
In recent years, as a promising transmission method, the new generation wireless systems can rely on IRS and UAV to enhance their spectral and energy efficiency since IRS is examined as a cost-effective deployment approach [
1,
2,
3]. Specifically, by varying the amplitude and phase for the incident signal, an IRS leverages its low-cost reconfigurable passive elements to reflect signals to distant users effectively [
4,
5]. The system relying on IRS can enhance the link quality and enlarge the coverage significantly when IRS is able to adjust amplitude-reflection coefficients and phase-shift variables appropriately [
6,
7,
8]. The authors in [
7] studied secure IRS–UAV systems by integrating IRS with UAV in wireless networks, which are susceptible to eavesdropping related to air-ground line-of-sight channels. To facilitate security, IRS can be leveraged due to its capability of reconfiguring the propagation environment, and thus IRS helps to reduce the impacts of eavesdroppers. The secure transmission of an IRS-assisted UAV network is analyzed under the impact of an eavesdropper. The transmit beamforming, the trajectory of UAV and the phase shift of IRS can be optimized to further obtain maximal rates [
7]. Besides, IRS has two prominent features—passive reflection with low power consumption and the operation of full-duplex (FD) mode without self-interference—and these benefits are crucial in comparison with conventional approaches—for example, relaying networks [
9].
To further increase energy and spectrum efficiency, the power-domain NOMA technology has been studied as a potential technique for IoT applications [
10,
11]. The NOMA architecture can be described as follows. In the transmit side of a NOMA system, different amounts of power at the transmitter or the base station (BS) are assigned to multiple users when superimposing signal processing, while those users share the same orthogonal resources such as frequency, time and spreading code. At the receiver side associated with a downlink, demultiplexing the transmitted signals is conducted by employing successive interference cancellation (SIC) [
12]. To decode the needed signals, the user treats all the weaker user signals as interference; then, its own signal can be decoded in the last step [
13,
14,
15]. In contrast to the downlink, the common receiver or the BS achieves a signal in an uplink, allowing multiple users to consume the common communication. This means that all users send a superposed signal comprising the signals of these users toward the BS. For signal detection, the BS needs the assistance of SIC to decode the signals of the transmitting users [
12]. In this way, a higher number of users can be served in the context of NOMA, which exhibits a significant improvement compared with the conventional orthogonal multiple access (OMA)-aided transmission approach [
11].
The combination of IRS and NOMA could be a prominent technique to leverage energy-efficient and low-cost deployment [
16,
17,
18,
19,
20,
21,
22,
23,
24,
25]. The authors in [
16] designed an IRS–NOMA system by considering both continuous phase shifting and discrete phase shifting corresponding to the ideal IRS and the non-ideal IRS circumstance. To demonstrate performance, closed-form expressions are derived to examine the average required transmit power, the outage probability and the diversity order by benefiting from the Laguerre series and the isotropic random vector. In demonstrated analytical results, the BS antenna number and the IRS element number are consistently affected by varying the transmit power. In [
17], IRS-aided simultaneous wireless information and power transfer (SWIPT) NOMA networks are studied. In particular, a problem of minimizing the transmit power at the BS can be solved by jointly optimizing the BS transmit beamforming vector, power splitting (PS) ratio, SIC decoding order and IRS phase shift. This optimization is guaranteed to satisfy the energy harvested threshold of each user and the quality-of-service (QoS) constraint. To improve the performance of multiple user equipments (UEs), the BS utilizes the UAV-mounted IRS to flexibly serve ground users [
18]. The direct non-line-of-sight links between the BS and UEs are required to power the IRS relaying links. The main performance metric is presented, i.e., the outage probability. The model of IRS–NOMA in [
19] allows this cell-edge user to be paired with a cell-center user to form the NOMA scheme. In this way, the coverage can be improved at the cell-edge user. The phase shift plays an important role in the design of an IRS-aided NOMA system, i.e., the impacts of random phase shifting and coherent phase shifting are further investigated [
20]. In [
21], IRS-assisted NOMA benefits from enabling BS’s beamforming vectors. To minimize transmission power, the beamforming vectors and the IRS phase shift matrix could be optimized. One can place the IRS at preferred locations, and line-of-sight (LoS) can be adopted for the links between the transmitters and the IRS before reflecting to receivers [
23,
24,
25]. The links can be enhanced if the system enables LoS and optimized passive beamforming vectors to implement a NOMA-assisted IRS. In [
23], by considering ideal and non-ideal IRSs, the system performance was evaluated for the link from source to destination via IRS. In [
24], a tremendous performance improvement could be confirmed in the approach of an IRS-assisted NOMA system. This means that IRS-assisted NOMA exhibits sufficient benefits to be incorporated into the existing IoT systems.
1.1. Related Works
In similar work, the authors of [
26] presented a hybrid aerial FD relaying protocol consisting of a IRS mounted UAV system. To help the information transfer between the base station and multiple users, the UAV acts as a relay operating in the decode and forward mode. The study also presented the closed-form formulas of achievable throughput, outage probability and ergodic capacity. The authors in [
27] studied IRS-assisted multi-user multiple-input single-output (MISO) wireless systems by considering the ergodic capacity in both uplink and downlink scenarios. They examined the realistic case of statistical instantaneous channel state information (CSI). Further, analytical expressions of the ergodic sum capacity were derived as the main contribution. In [
28], a two-IRS system was studied by employing the centralized and the distributed modes corresponding to the reflecting elements being mounted at a single IRS, and multiple IRSs were designed with the same number of reflecting elements. To examine the benefits of the two-IRS model, the closed-form approximation expressions of the ergodic capacity were derived along with their tight upper and lower bounds to provide more necessary insights. Although the transmit power and the Rician-
K factor have the main influences on the system performance, selected modes of the centralized IRS result in a better ergodic capacity as compared with the distributed IRS mode. It is worth noting that the location of the IRS has strong impacts on ergodic performance. Therefore, a multiple IRS design for IoT is necessary.
1.2. Motivations and Our Contributions
In contrast to [
27,
28], Nakagami-
m fading channels are deployed for an IRS-aided system in a recent work [
29]. The performance is decided by two phase configuration designs including random and coherent phase shifting. As the main performance metrics, the authors in [
29] derived formulas of the outage behavior and the bit error rate when binary modulation schemes are applied. The closed-form approximations for the ergodic capacity are extra performance evaluations. However, we first need to answer how many IRSs are sufficient to obtain the expected achievable rate. Secondly, Rayeligh and Rician channels could be applied for several practical situations of UAV. Therefore, this study prefers to examine the achievable rate in practical scenarios where hardware impairment is a key factor in degraded performance. We can summarize our contributions as follows.
We consider an IRS–NOMA–UAV system without direct links, which consists of a source and several IRSs. We focus on the performance analysis of a group of two users and further determine the impact of hardware impairment.
We derive closed-form expressions for the achievable rates for two NOMA users under the channel models of Rayleigh and Rician. Compared with recent work [
30], our result could be combined with their result to provide complete ergodic performance analysis in a more practical circumstance.
We employ Monte Carlo simulations to validate the analytical outage probabilities. The achievable rate of each user mainly depends on power allocation factors rather than other main parameters such as the number of IRSs, the number of meta-surface elements and the IRS reflecting coefficient.
The remainder of this article is organized as follows. In
Section 2, a double IRS–NOMA–UAV system model is described, and the respective received signal with hardware impairment is formulated. We provide the derivation of closed-form ergodic achievable rates for a group of IoT users in
Section 3. We aim to verify the results of computations in
Section 4. Finally, we summarize concluding remarks and future research in
Section 5.
2. System Model
We aim to design a IoT network by enabling IRS, NOMA and UAV techniques, where a single antenna source
powers the signal transmission by IRS to serve many users at destinations. The IRSs are mounted in UAVs for better transmission from the base station to ground users. These ground users are divided into many groups, and a considered group contains two users
. The system can maximize the benefits of IRS if multiple
I IRSs are deployed, as shown in
Figure 1. It is assumed that there is no direct path between the source
S and ground users (destinations). To reduce the cost of the design, we refer to the first scenario where two IRSs, i.e.,
and
, possess reflecting elements
and
. Those IRSs are placed at specific locations (i.e., buildings) to reflect passive beamforming signals towards the destinations (IoT devices). We need to answer how many IRSs are required to achieve the best performance at destinations. Therefore, we move our attention to the second scenario (the benchmark) by assigning three IRSs, i.e.,
,
and
, which are installed with reflecting elements
,
and
, respectively (it is reasonable to design double-IRS due to cost efficiency in deployment. Although multi-IRS was developed in [
31], the numerical result demonstrated a small gap between the double-IRS and three-IRSs case. Therefore, in this study, we emphasize the performance for two scenarios of IRSs).
We denote the (scalar) channels from the
S to the IRSs, and from the IRSs to
, respectively, as
and
. The hardware impairment at the
S is denoted as
, where
represents the proportionality coefficients, which describe the severity of the distortion noises at
S. The hardware impairments at the
is
[
32], where
represents the proportionality coefficients. Here,
is associated with the distortion noises at
. Then, the overall received signal at the user
with multiple
I IRSs is given as [
30,
33]
where
P is the total transmit power at the source,
is the transmitted signal by source,
denotes the power allocation factor for message
with
,
[
34],
is the adjustable phase applied by the
n-th reflecting element of the
,
is the reflection coefficients of
I with
, and
stands for the circularly symmetric additive White Gaussian noise (AWGN) with zero mean and variance
, i.e.,
.
2.1. The First Scenario
The system has two hops from source to IRS and from IRS to destinations. These links are demonstrated in the system model, i.e.,
,
,
and
, along with their channel gains, denoted as
,
,
and
[
35]; the links
,
,
and
are associated with distances
,
,
and
, respectively. Here, the path-loss coefficient is
, while
and
and
and
are the phases of the channel gains.
,
,
and
are the amplitudes of the channel gains, and they are adopted with a Rayleigh distribution. In the scope of our paper, it is reasonable to assume that the IRS achieves the full knowledge of the channels
,
,
and
.
The overall received signal at user
is given as [
36]
where
is the adjustable phase applied by the
nth reflecting element of
,
stands for the adjustable phase applied by the
nth reflecting element of
,
is the reflection coefficient of
with
, and
represents the reflection coefficients of
with
.
The hardware impairment at the
is denoted as [
32]
The received signal to noise plus distortion ratio (SNDR) at the destination
is defined as
where
is the average signal-to-noise ratio (SNR) at the source,
,
,
and
.
It is noted that from (
4) that the highest value of
can be obtained by disregarding the channel phases. In this case, the phases can be modified as
for
and
for
[
35], while the maximal
can be written as
The achievable rate for the
is given as
The overall received signal at the user
is given as [
36]
where
stands for the adjustable phase applied by the
nth reflecting element of the
, and
is the adjustable phase applied by the
nth reflecting element of the
. In addition,
and
are the channel gains with
and
[
35], where
and
are the distances for the
link and
link, respectively, and
and
are the phases of the channel gains.
and
following a Rayleigh distribution are the amplitudes of the channel gains. Moreover, we assume that the IRS has the full knowledge of the channel phases of
and
. The hardware impairments at the
is denoted as [
35]
The resulting SNDR at the second user
to decode
can be formulated as
where
,
.
In (
9), to obtain the maximum value of
, we need to eliminate the channel phases. Similar to the method in [
35], by setting the phases
and
, the maximal
can be written as
After SIC, the resulting SNDR at the user
to decode
can be formulated as
The achievable rate for the
is given as
2.2. The Second Scenario (the Benchmark)
The overall received signal at the user
is given as [
33,
36]
where
. In addition,
and
are the channel gains with
,
[
35], where
and
are the distances for the
link,
link, respectively, and
and
are the phases of the channel gains.
and
following a Rayleigh distribution are the amplitudes of the channel gains. Moreover, we assume that the IRS has full knowledge of the channel phases of
,
.
Similar to (
4), the received SNDR at the destination
is defined as
where
,
.
In (
14), to obtain the maximum value of
, we need to eliminate the channel phases. Similar to the method in [
35], by setting the phases
for
, the maximal
can be written as
The overall received signal at the user
is given as [
33,
36]
where
.
is the adjustable phase applied by the
nth reflecting element of
. In addition,
is the channel gains with
[
35], where
is the distance for the
link, and
is the phase of the channel gains.
following a Rayleigh distribution is the amplitude of the channel gains. Moreover, we assume that the IRS has full knowledge of the channel phases of
.
Similar to (
9), the resulting SNDR at the legitimate user
to decode
can be formulated as
where
.
To obtain the maximum value of
, we need to eliminate the channel phases. Similar to the method in [
35], by setting the phases
for
.
After SIC, the resulting SNDR at the user
to decode
can be formulated as
4. Simulation Results
In this section, simulation results are provided to evaluate and assess the capacity performance of the proposed scheme of using multiple IRSs for the IRS–NOMA–UAV system. The single antenna source is placed at the origin
, the destinations at
,
, and the three IRSs at
,
,
[
36]. The power allocation factor
= 0.6 [
34], the path-loss
[
34], SNR
(dB) and reflection coefficients
= 0.7,
=
=
= 200 [
30,
33], while the Rician-
K factor for all links from and to the IRS was 10 (dB) [
36],
= 0.05 [
32]. We adopt the principle of Monte Carlo simulations as shown in
Figure 2.
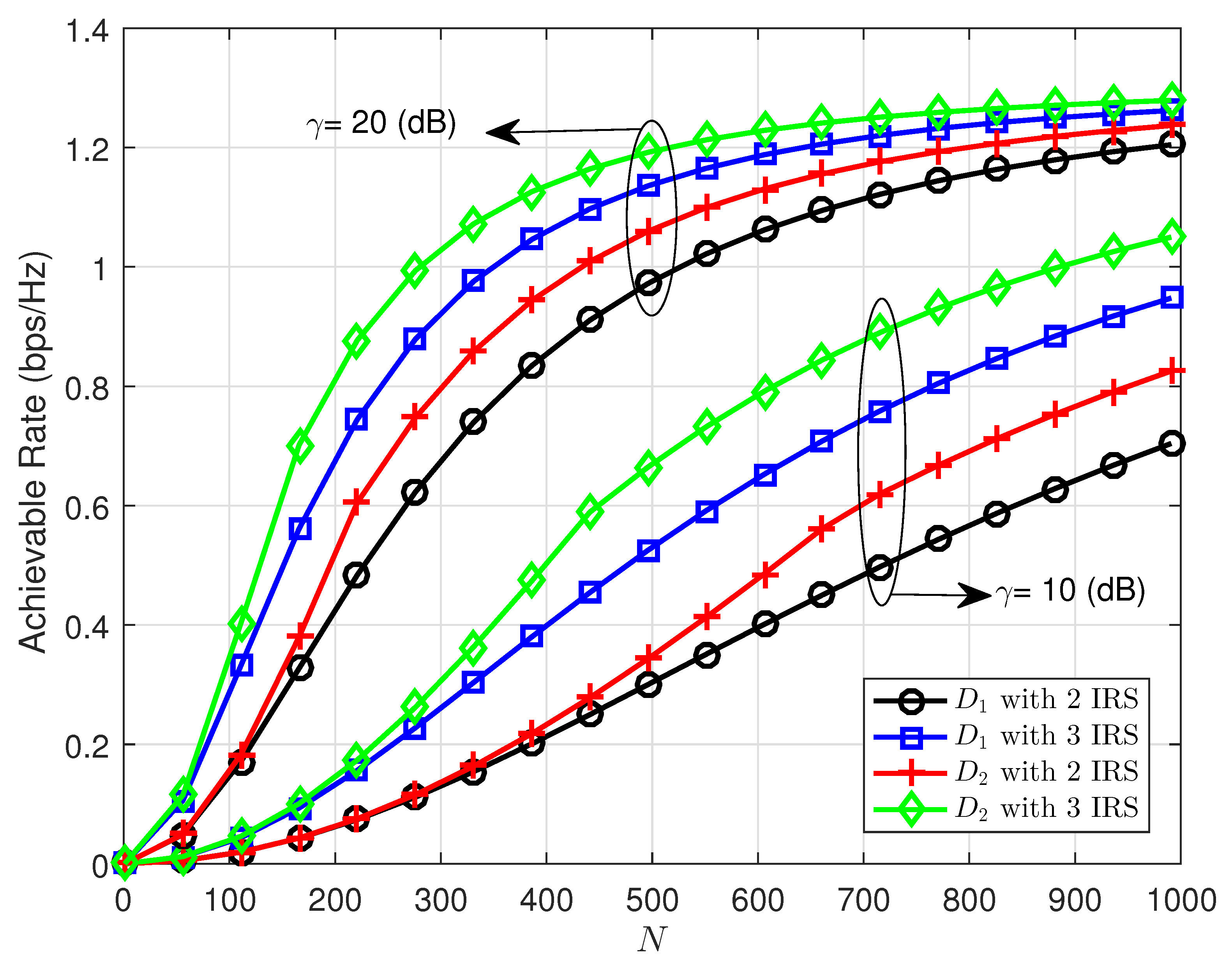
Figure 3 demonstrates the ergodic capacity performance as a function of
N and
for two scenarios. When the IRS elements give additional constructive paths, an enhancement in the SNDR could be affected by the increasing
N. It is intuitively seen that a higher average SNR at the source leads to a remarkable gap between the ergodic capacity of the two scenarios.
In
Figure 4, we confirm the impact of the power allocation factors on the achievable rate. It can be easily seen that more power
assigned to the first user results in a higher achievable rate while the performance of the second user increases at
for the case of
= 20 (dB) and declines remarkably afterward. The number of meta-surfaces in the three-IRSs case plays an important role in enhancing the quality of received signals at destinations. However, more power assigned to the transmit signal to a selected user is a key factor affecting the achievable rate. On the other hand, we can observe that more IRSs served for user
can be employed to improve the rate performance significantly if
is greater than 0.7.
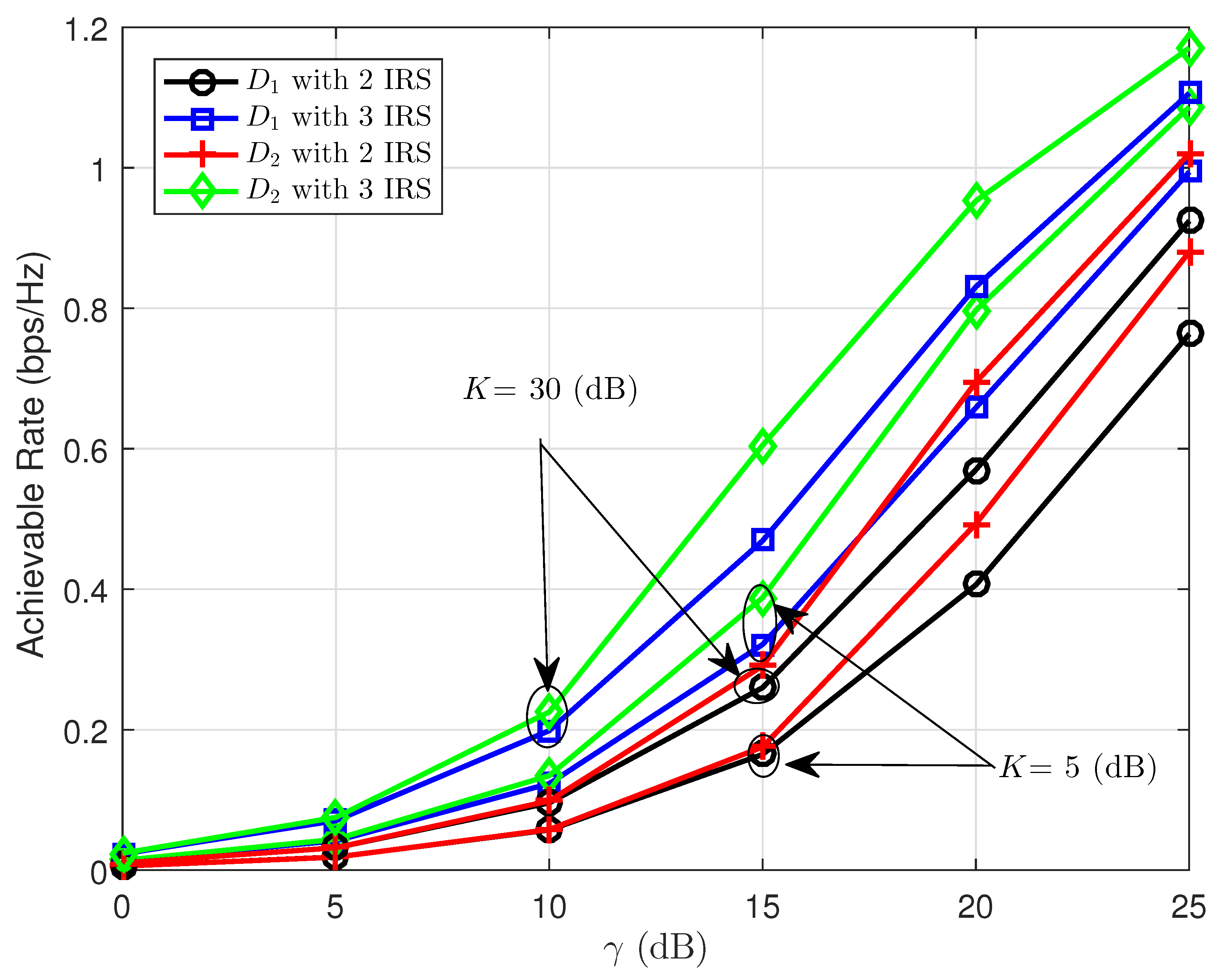
Furthermore,
Figure 5 showcases the severity of the hardware impairment for ergodic performance. In particular, due to the transceiver hardware impairment
, the ergodic performance saturates for the case of
and cannot be further improved even when increasing
over 30 (dB). It is observed at the low region of
that different levels of transceiver hardware impairment lead to a small gap of achievable rates, and the performance gap among two users is small as well. The capacity ceiling of both users exists when
corresponding to
= 30 (dB). It is strongly confirmed that the capacity ceiling is determined by the levels of transceiver hardware impairment rather than
N,
and other scenarios.
Figure 6 considers the distances of the source–IRS and IRS–destination links. If IRS is placed at the middle point between the source and destinations, the curves of the achievable rate exhibit the lowest values. When the IRS moves close to either the source or the destinations, the achievable rate improves significantly for the case of
. In this experiment, the achievable rate of the three-IRSs case is still better than the other case.
We can verify how the setting of IRS affects the achievable rate, as shown in
Figure 7. At the value of the number of meta-surface
, the achievable rate obtains the maximum value. The gap among two cases of
could be larger when
N is greater than 150. The important conclusion is that it is not necessary to design too many meta-surfaces at the IRS since the achievable rate saturates in the region where
N is greater than 500.
The setting of the channel has slight impacts on the ergodic performance since we see a small gap among the curves in
Figure 8. Besides the locations of IRS, the quality of the channel gives slight variations in the performance of IoT users. Our similar result in the double-IRS and three-IRSs cases can be compared with the results in the recent work [
30]. This means that low-cost IoT can obtain benefits with the double-IRS approach with little influence from selecting the channel models.
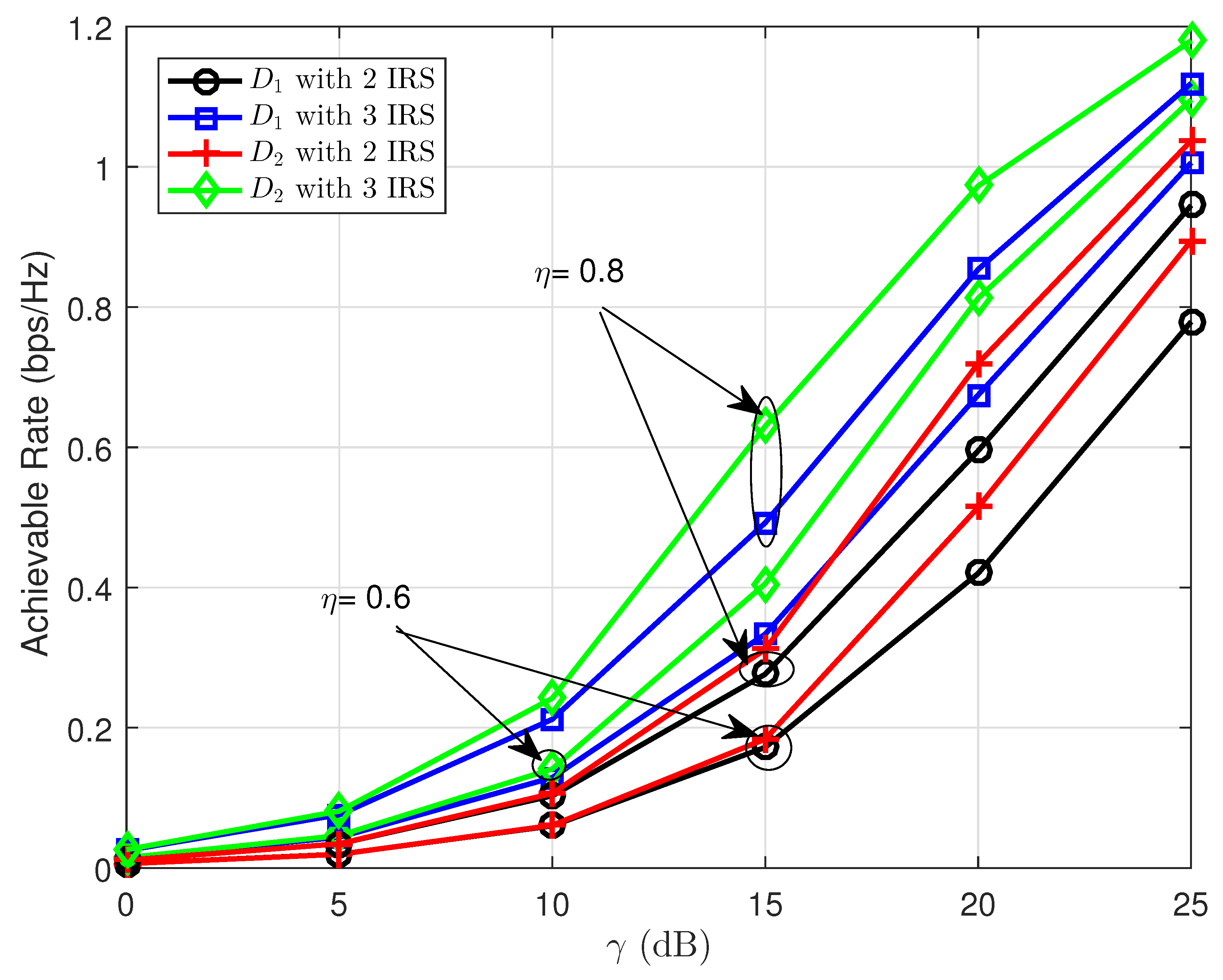
The setting of IRS, i.e., the reflection coefficient, has the main effect on the achievable rates for two cases of IRS, as shown in
Figure 9. We can see that
corresponds to a higher achievable rate. The reason is that reflecting the capability of IRS could be better for the case of
, and SNDR can be enhanced along with a corresponding improvement of the achievable rate. This simulation still confirms that the three-IRSs case provides higher ergodic performance. However, increasing IRSs leads to a higher cost of deployment. Similarly,
Figure 10 confirms that there is a little influence of Rayleigh and Rician channels on ergodic performance for both IoT users.
The benefit of NOMA regarding spectrum efficiency leads to improved performance in terms of the achievable rate, as shown in
Figure 11. When the region of
is higher than 20 (dB), a bigger gap between NOMA–IRS and OMA–IRS can be reported. The cases of Rayleigh fading and Rician fading do not affect how much OMA–IRS outperforms OMA–IRS.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










