1. Introduction
As the population of our planet is increasing steadily, the global food demand follows the same trend. The agricultural sector not only has to produce more to cover the increasing food consumption, but this should be accomplished in a more sustainable way than before [
1]. In the last few years, precision agriculture has introduced many technological advancements, so farmers have a an increasingly extensive toolset in hand in order to boost crop production. Unmanned Aerial Vehicles (UAVs) have a prominent position in farmers’ toolkits. UAVs are being used in many fields of agriculture including mapping, plant stress detection, biomass and field nutrient estimation, weed management, chemical spraying, and finally in geo-referencing [
2].
Although the vast majority of agricultural applications are outdoors, some efforts to use UAV in greenhouse operations have been reported. In [
3], the authors present a methodology for automatic pest detection and classification using a Support Vector Machine with images acquired by a UAV and an IP camera. Moreover, a ground and aerial robotic system was proposed by [
4] to measure temperature, humidity, CO
2, and luminosity in the greenhouses from Almeria (Spain). In [
5], a benchmark for different visual simultaneous localization and mapping (VSLAM) algorithms was carried out in a barn and a greenhouse. In previous works, the communication problems between the UAVs and ground station have not been addressed. A plant pollination concept with the use of nano-copters is presented by [
6]; however, no technical details were included in their research.
In general, the lack of indoor applications can be justified mainly due to limitations that exist in indoor environments. For example, for navigating a UAV outdoors, localization can be achieved simply by using GPS. However, GPS is not an option for indoor applications. Therefore, to achieve indoor localization, different approaches have been proposed, which in some cases involve more sophisticated sensors such as lidars and cameras. It is well known that these sensors produce large amounts of data, and the data processing is computationally expensive. In order to reduce the onboard processing workload, it is a common practice to assign these calculations to the ground controller or even to a remote computing cloud service; however, a reliable connection is required.
A stable connection between the UAV and the control unit is an important aspect of indoor navigation. On one hand, the UAV should be able to receive navigation commands, and on the other hand, it should send back to the controller its current state. Thus, the real-time data from the built-in sensors should be transmitted reliably. Taking into account that UAVs use Radio Frequency (RF) signals, indoor farms are ambient complex systems, and phenomena such as reflection, absorption, diffraction, scattering and interference can cause attenuation or signal loss. As a result, the connection can become unreliable. The RF signal propagation is also affected by the environmental conditions, the material properties, and the incident angles. In addition, as the use of technology in the agricultural sector is becoming more and more popular, other wireless devices possibly transmit in the same spectrum, causing signal interference.
This is especially the case for UAVs that use Wi-Fi for their communications. Since different technologies may share the same Wi-Fi spectrum, disturbances are not unlikely. For example, in [
7], the effect of the adjacent-channel interference in IEEE 802.11 WLANs has been studied, and in [
8], the interference between Wi-Fi and ZigBee networks has been studied.
In the past, many researchers have tried to study RF signal propagation in different construction materials. A list of materials has been analyzed over a wide range of frequencies in [
9]. In a similar way, in [
10], the propagation losses were studied, but this time the specific frequency bands of 2.4 GHz and 5 GHz were chosen as part of the IEEE 802.11 standard for Wi-Fi applications. Despite the fact that these studies reveal the behavior of the RF signals on different building materials, these data cannot directly be translated into solid conclusions for entire constructions.
Another area that other studies have focused on is the Wi-Fi evaluation in different buildings. In [
11], the relation between RSS and throughput of an IEEE 802.11g network was analyzed in an office building, and the results showed that the throughput was not affected proportionally when the RSS changed. The authors of [
12] performed an experimental propagation comparison between Wi-Fi and Super Wi-Fi networks indoors, proving that Super Wi-Fi can improve the network performance thanks to better signal propagation in indoor environments. In [
13], the propagation topology of a house at 2.4 GHz was examined by comparing experimental measurements with indoor path models. Finally, in order to evaluate Wi-Fi networks, the authors of [
14,
15] proposed methods for generating Wi-Fi heat-maps. However, none of these studies specifically focused on the connection capabilities of UAVs in greenhouse environment.
A few studies have been directed at experimentally analyzing UAV-to-UAV and UAV-to-Ground 802.11 network links [
16,
17,
18,
19,
20], where the impact of distance over the signal strength and the throughput were studied. Similarly, in [
21], the open space propagation was studied using Ultra-Wide-band (UWB) modules. In addition, the effect of the antenna orientation and the path loss was studied empirically.
Other researchers approached the RF propagation by involving models. For instance, the authors of [
22] have developed a generalized RF model for Air-to-Ground path loss in urban environments. There are several studies that attempted the performance analysis of UAV ad hoc networks. For example, in [
23], a model is proposed that uses Markov chain. Furthermore, in [
24], model simulations show that the impact of directional antennas increases the overall network performance. Different radio technologies have also been evaluated in UAV applications. In [
25], for instance, the performance of a 60 GHz mmWave network using off-the-shelf radio modules is explored throughout experimental measurements. However, in all cases described above, UAVs were employed for signal propagation analysis and connectivity evaluation; the main focus was not on the connection capabilities of the UAV but instead on air-to-air and air-to-ground networks outdoors.
The effectiveness of 802.11n networks in contexts of high data rates was studied in [
26,
27]. Throughput loss due to interference and high packet loss rate was reported even in cases where the received signal strength level was high. Furthermore, it was found that the throughput performance is significantly affected by the number of receiving antennas and interference caused by other transiting 802.11g networks around. These two papers do not focus specifically on UAV or airborne communication but provided generalized conclusions about the performance of 802.11n networks. Finally, in [
28] the performance of 802.11n networks in airborne application was evaluated empirically, using a fixed-wing UAV configuration. The authors claimed that the theoretical performance of these networks differed dramatically to the empirical performance due to the automatic rate adaptation mechanism of the 802.11n standard and especially when the mobility of the UAV increased. The above research, however, was conducted only outdoors, and a fixed-wing UAV was used.
This study is an attempt to empirically explore the performance of the 802.11n on UAV applications in greenhouses. The influence of the greenhouse construction on the Wi-Fi communication between a UAV and the controller unit was studied. For this reason, experimental measurements were conducted using two commercial quad rotor drones in different indoor and outdoor scenarios. Furthermore, the capabilities of both UAVs have been explored by generating their radiation patterns. Finally, their maximum flying distances in an open space and in the greenhouse environment was compared. The acquired data are publicly available.
2. Materials and Methods
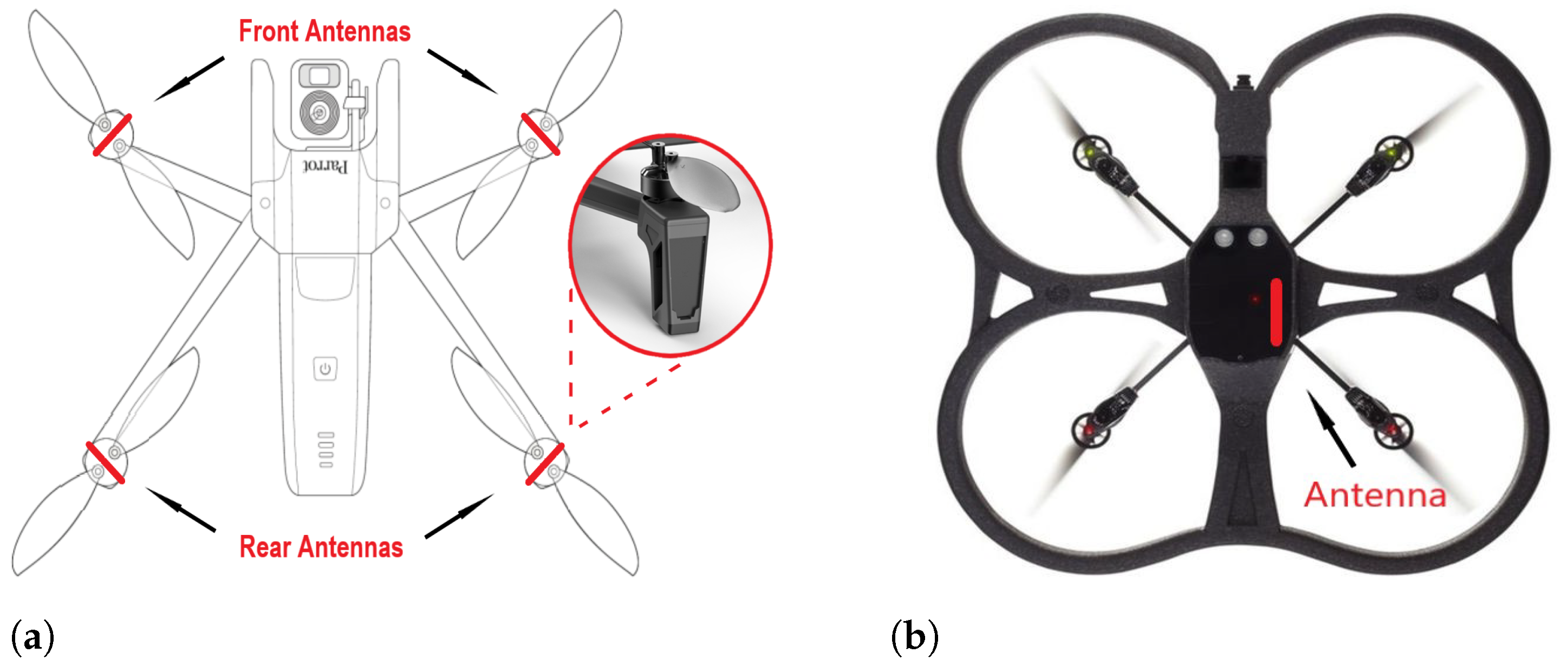
The UAVs used in this study were the AR.Drone 2.0 and the Anafi which were both developed by the French company Parrot. The AR.Drone 2.0 is an inexpensive, Linux-based drone while the Parrot Anafi is a professional platform with extended features. Both drones are equipped with several sensors including Inertia Measurement Unit (IMU), magnetometer, ultrasonic altimeter, and pressure sensor, and each one has two cameras. Finally, they both comply with the 802.11n standard for sending and receiving commands and data to the control unit.
As a control unit, an ASUS X510UNR laptop, which is equipped with a built-in Wi-Fi adapter based on the Intel 8265 chipset was used. Furthermore, the laptop was configured to run Ubuntu 18.04 LTS. In order to ensure that the connection between a UAV and a controller unit is reliable, the connection quality was evaluated. For this reason, three different indoor and outdoor experiments were conducted, measuring packet round-trip time, throughput, and signal strength. The data acquisition was achieved by using python and the built-in Linux utilities ping and iwlist.
The outdoor experiments were carried out in an open field in Papendorp (The Netherlands), a location with minimal Wi-Fi network presence. Regarding the indoor scenarios, the greenhouse facility in the Wageningen University campus was used. It is worth mentioning that the same equipment and tools were used in all experiments involving no additional components for enhancing the communication capabilities of the UAVs or the controller PC such as external antennas; however the setup differs.
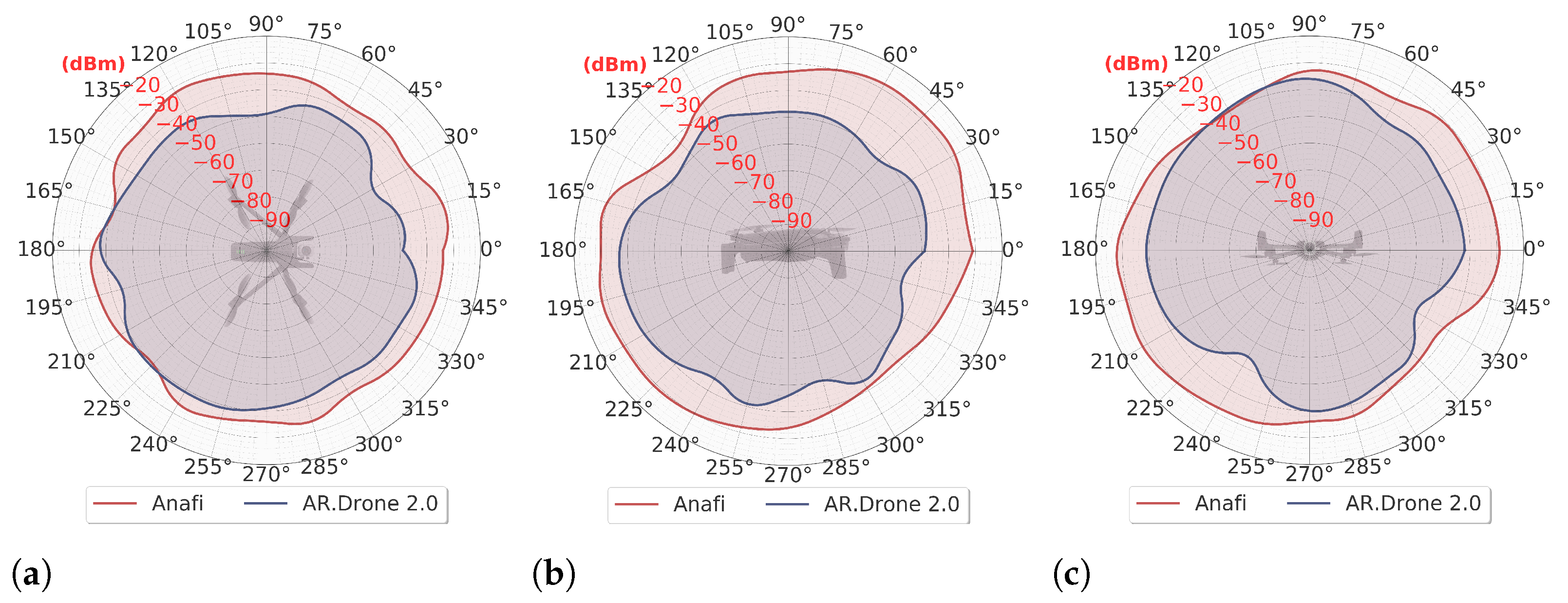
2.1. Radiation Pattern
The communication between the drone and the controller is strongly related with the radiation pattern of the drone. The radiation pattern determines how sensitive the drone is on receiving and transmitting wireless signals on different orientations around its axes. The physical characteristics of the antenna and the designing decisions during the drone development are two of the main reasons that communication issues may occur. For instance, badly placed antennas often suffer internal interference from the onboard electronic circuitry. In addition, the building materials of the drone can cause further shadowing effects, and hence signal strength drop is likely to occur.
There are various approaches to studying these effects, including modeling and taking actual measurements in an RF anechoic chamber [
29,
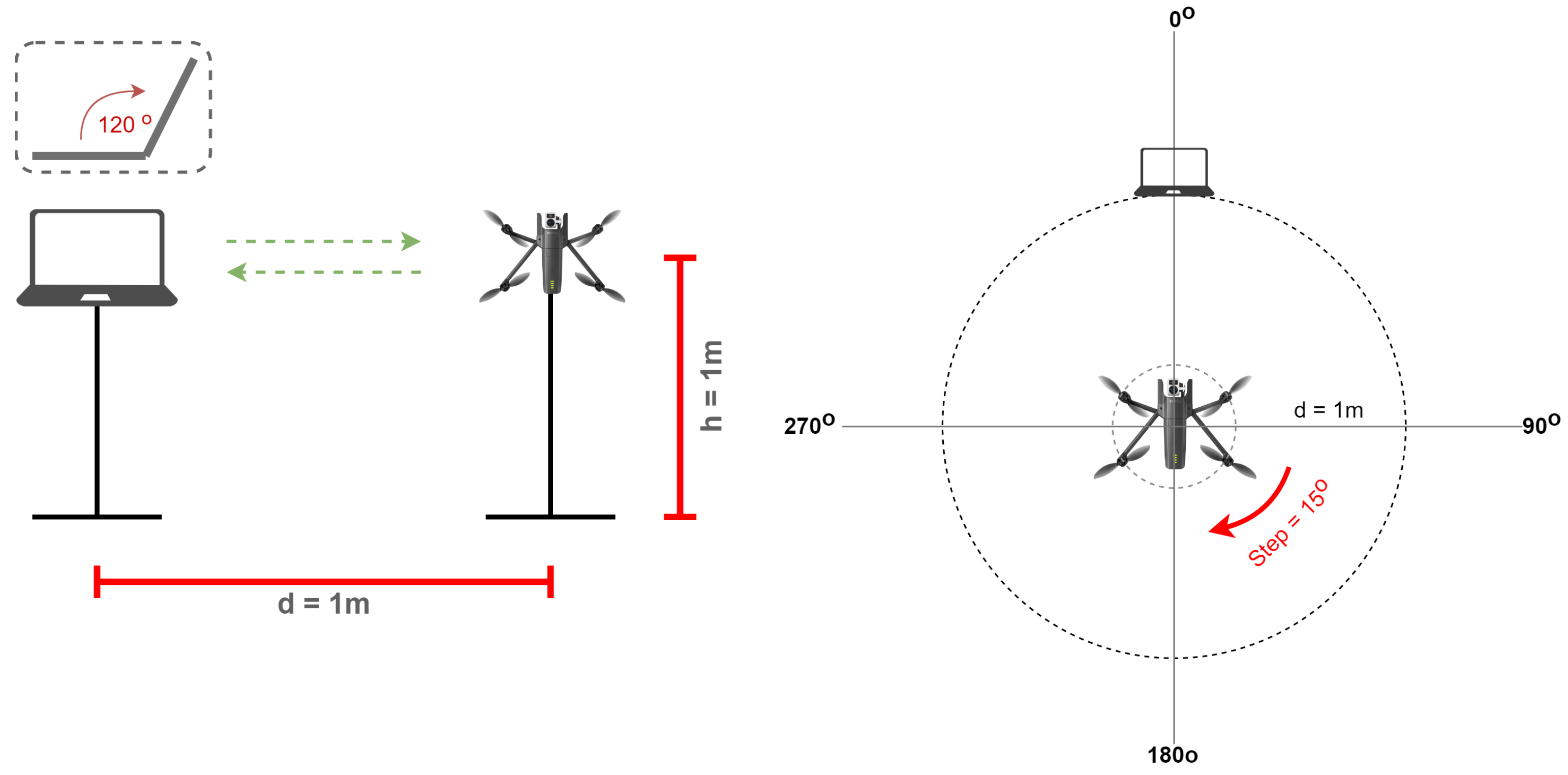
30]. Considering that most of the physical properties of the drone components are unknown, the mathematical modeling cannot be applied. On the other hand, anechoic chambers are sophisticated systems, and accessing them is challenging. Taking these factors into account, we decided to conduct measurements in an open field, an environment with minimal reflections and Wi-Fi interference from other sources. From measurements we conducted at different heights, we concluded that the effect of the ground reflections and absorption is insignificant after 70 cm without affecting the shape of the radiation patterns; therefore, a height of 1m was chosen.
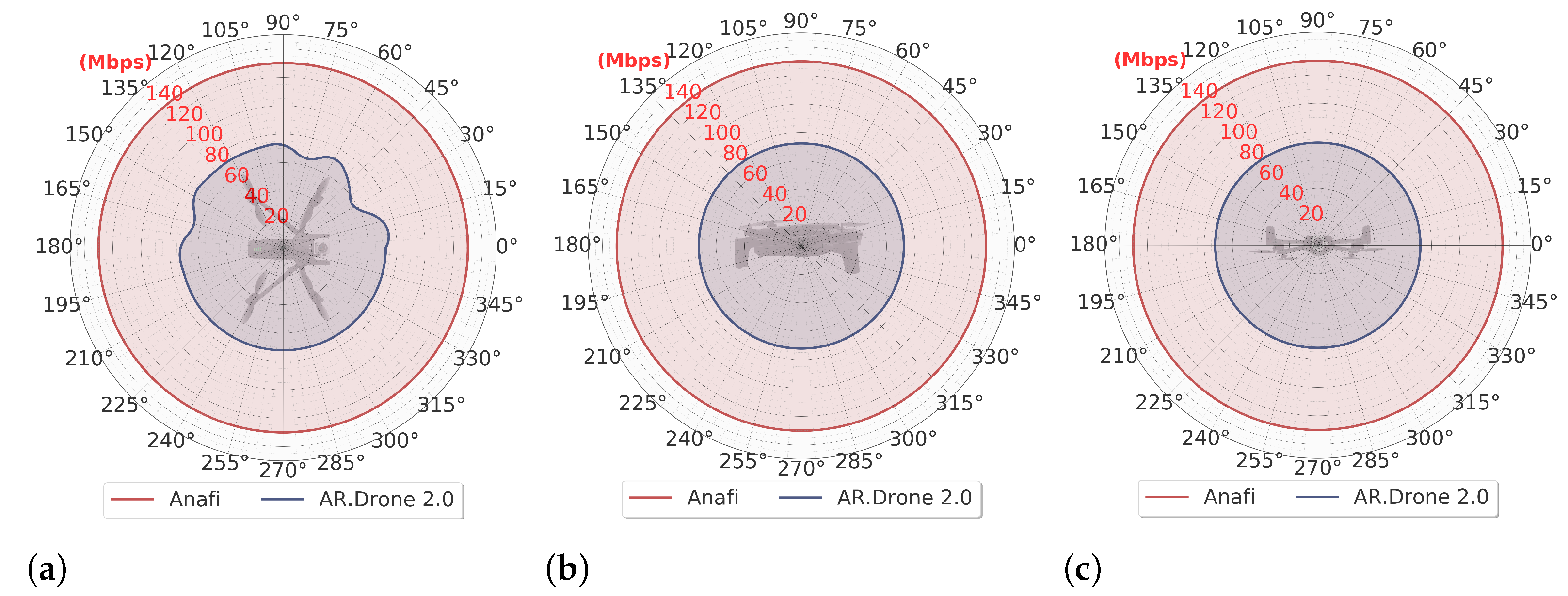
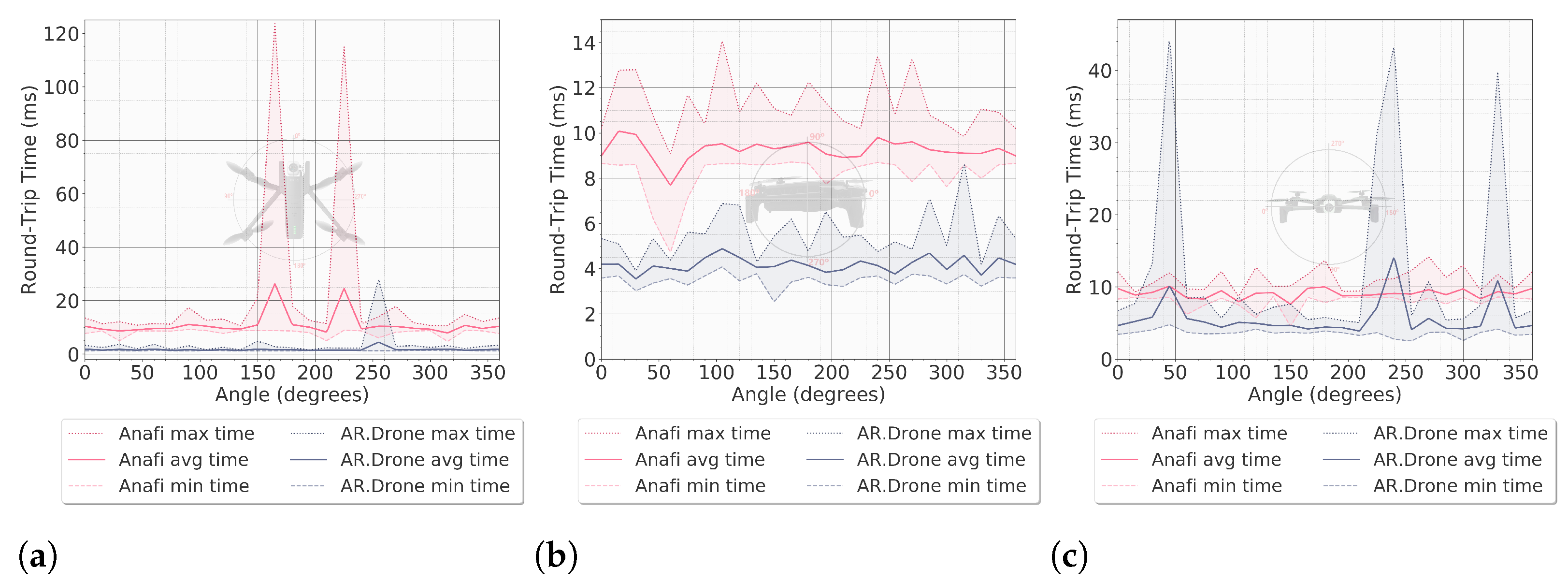
During the measurements, both the signal strength and the round-trip times and the throughput in different drone orientations were measured while the propellers were activated. Two 3D-printed stands, one for the PC and one the UAVs, were designed in order to hold the UAVs in a fixed distance and height of 1m in front of the PC. Since each UAV was measured in X, Y, and Z axes individually, a different 3D printed holder was designed for each case. Every holder was capable of rotating each UAV with a step of 15 degrees. In
Figure 1 and
Figure 2, the experimental setup is presented.
The radiation patterns were usually viewed in two principal planes: the horizontal, which is referred to also as azimuth, and the vertical, which is also known as elevation. In this study, however, we measured the signal radiation in three principal planes, one for each axis, X, Y, and Z, and we use the term yaw, pitch, and roll, respectively, since these are the most commonly used terms in the aviation world when referring to the axes of an aerial vehicle’s coordinate system.
2.2. Three-Dimensional Signal Propagation in a Greenhouse Environment
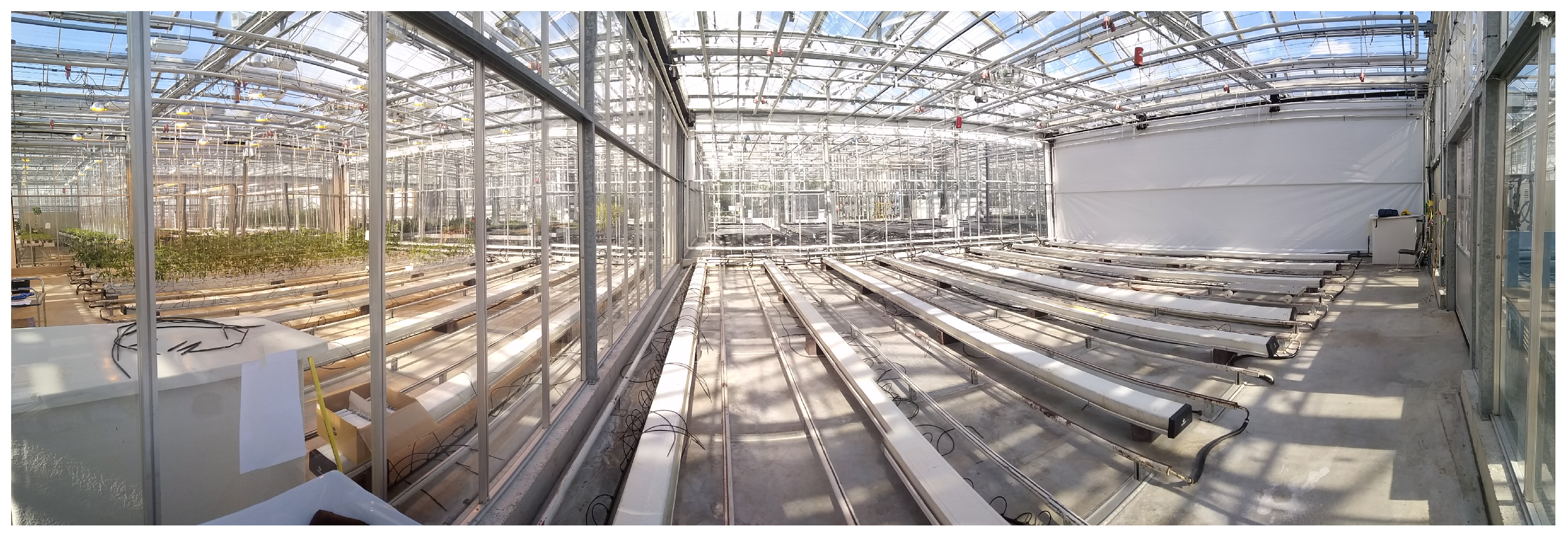
Indoor farming constructions such as greenhouses are ambient complex environments, as illustrated in
Figure 3.There is a long list of different types of equipment commonly found inside the cultivation room, among which are heating and cooling systems, lighting equipment, wires, pipes, harvesting and transporting tools, and so on. In such an environment, there is a large variety of materials and shapes, and therefore the UAV communication with the ground station can be challenging. The metallic surfaces usually cause constructive and destructive interference and phase shifting due to multipath propagation. As a result, signal shadowing effects, packet loss, reduction in throughput, or even complete communication loss can happen.
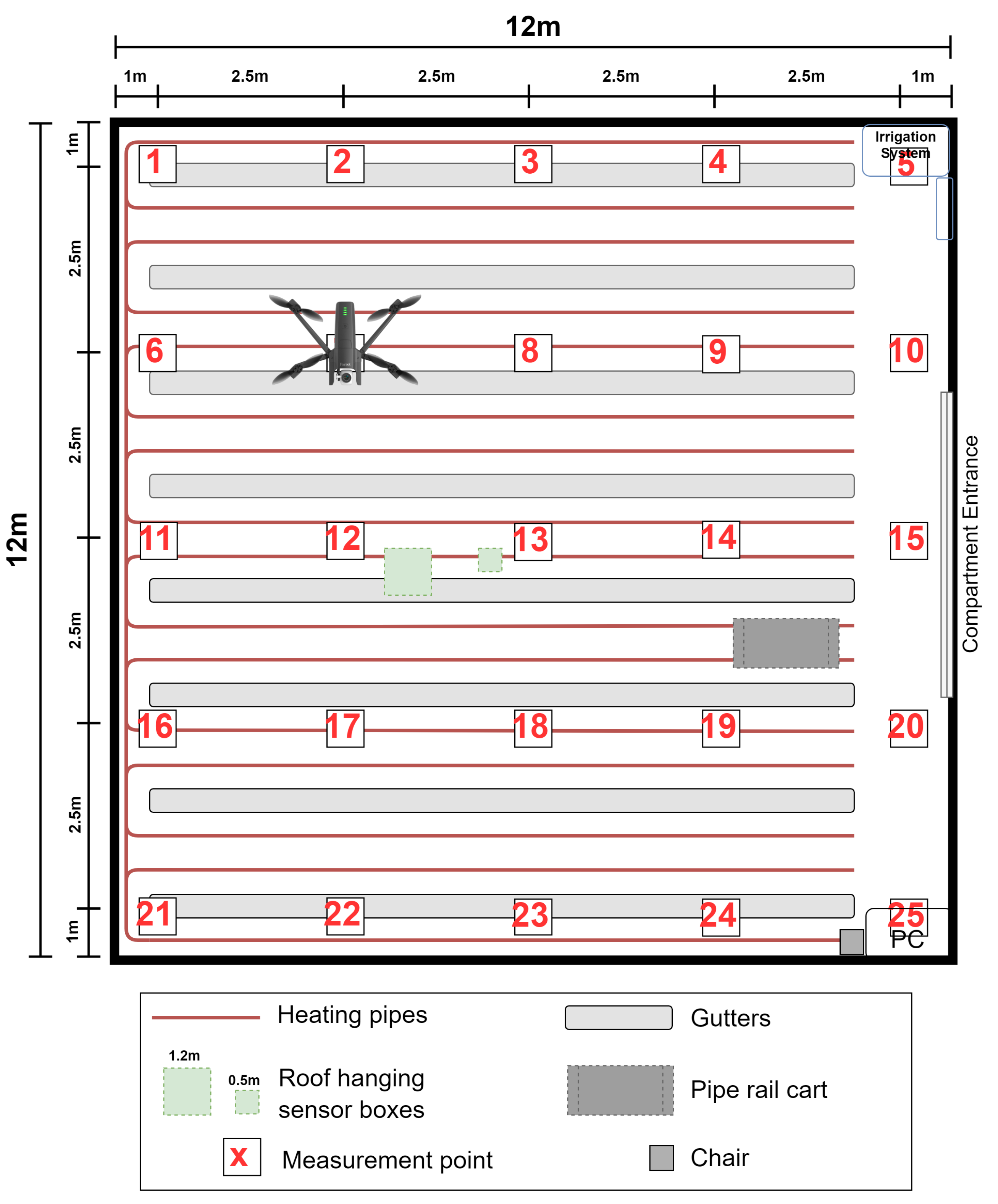
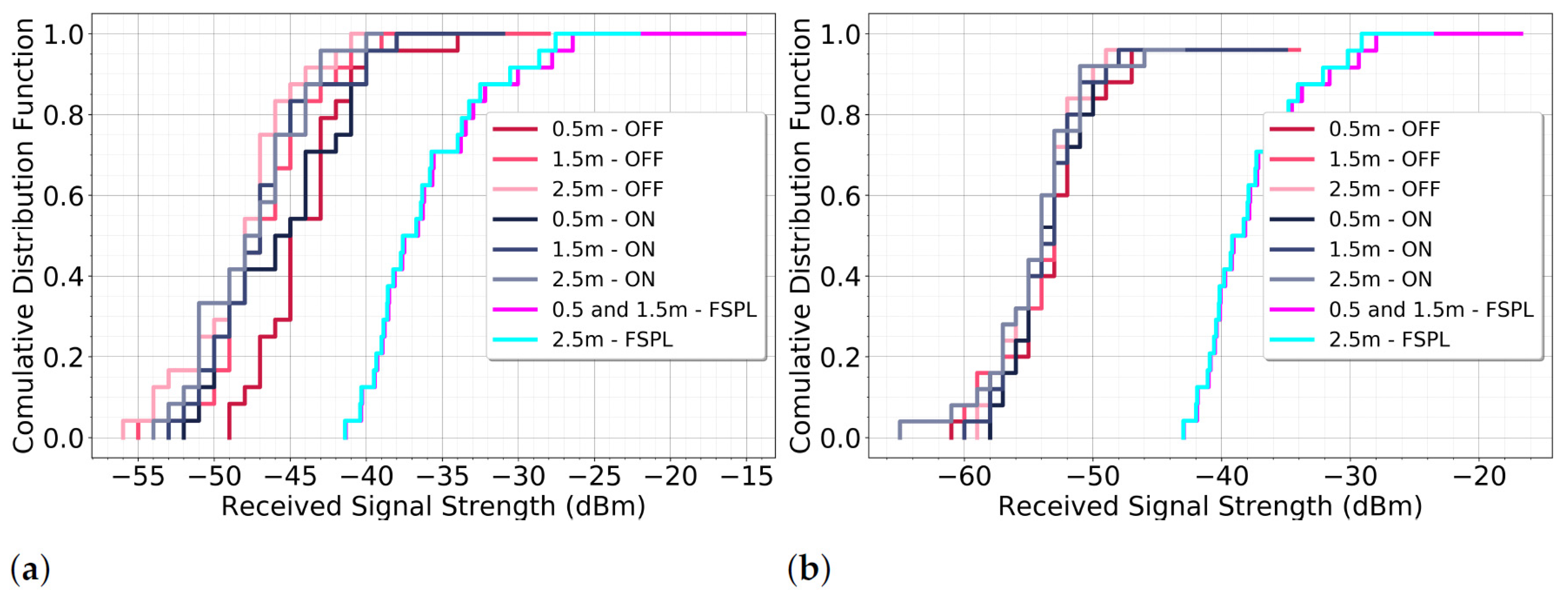
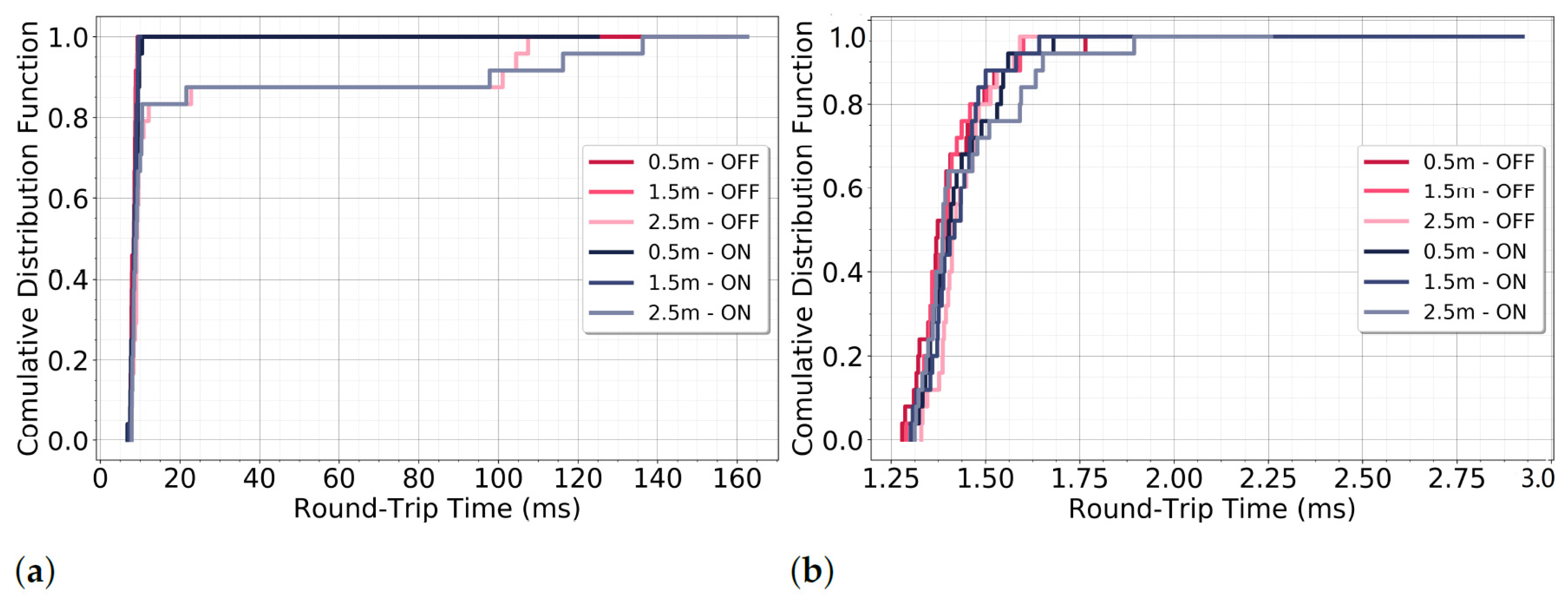
In this experiment, data on the signal strength, throughput, and the round-trip time were acquired for both drones in a greenhouse compartment. After placing 25 location markers on the compartment’s floor with an equal distance of 2.5 m from each other, the UAVs were moved manually at each location, and measurements were conducted at three different heights, namely 0.5 m, 1.5 m, and 2.5 m, respectively. Data from each drone were collected in two different scenarios, first with the propellers turned on, where the throttle was set to 100%, and then with the propeller turned off, where the throttle was set to 0%. During the measurements, not only was the position and orientation of the PC steady, but also the UAVs were aiming for a fixed orientation, as
Figure 4 illustrates. It is worth mentioning that no plants populated the greenhouse during the measurements.
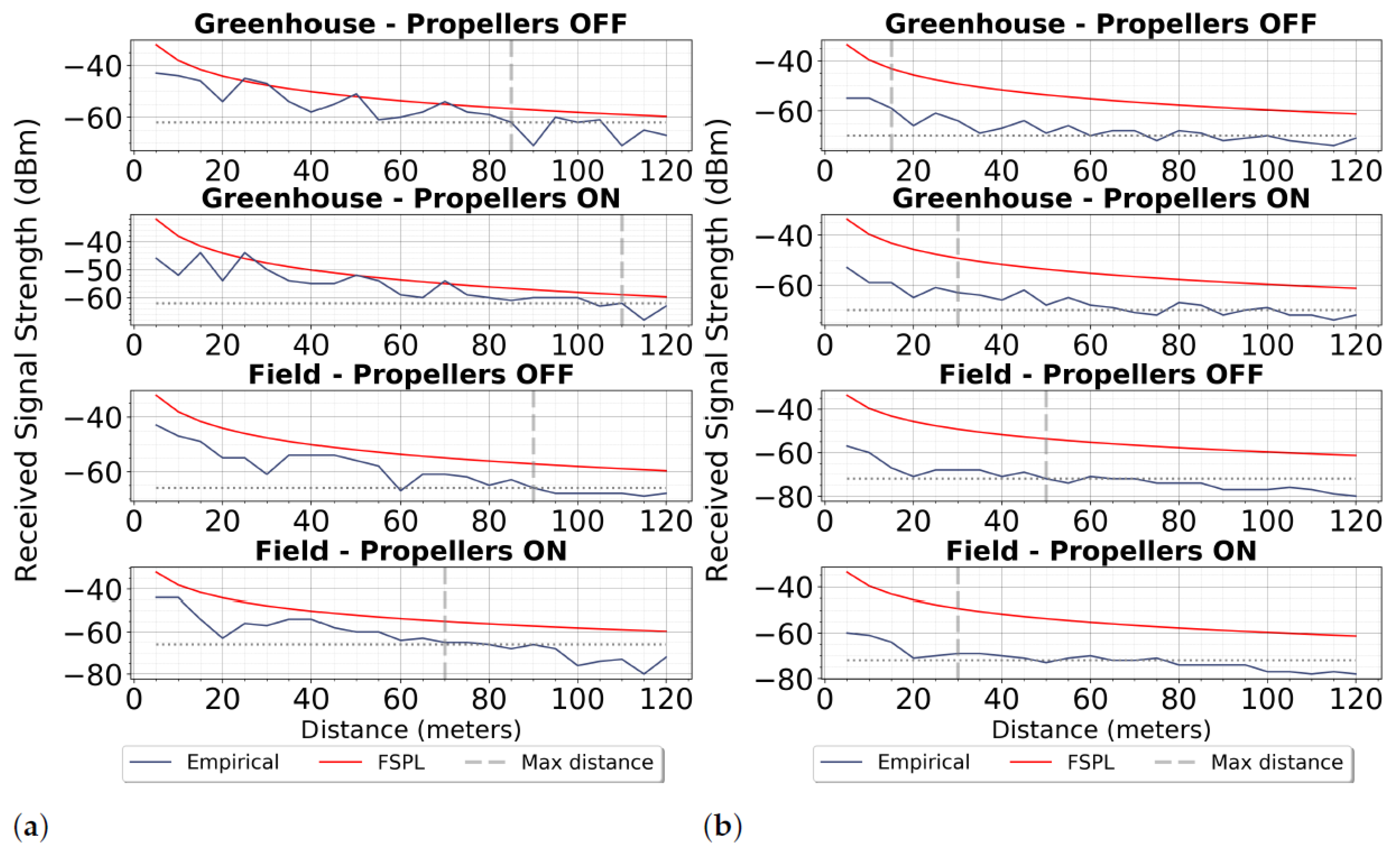
The path loss for each scenario was calculated, and then the results were compared with the Free Space Path Loss (FSPL) model [
31], one of the most fundamental models for signal propagation:
The Free Space Path Loss is an idealistic model; it represents the signal attenuation in cases where there is line-of-sight propagation and no obstacles are involved between the receiver and the transmitter. This means that only the signal attenuation caused by distance has been considered while it is assumed that lossless antennas were used and there is absence of multipath effects.
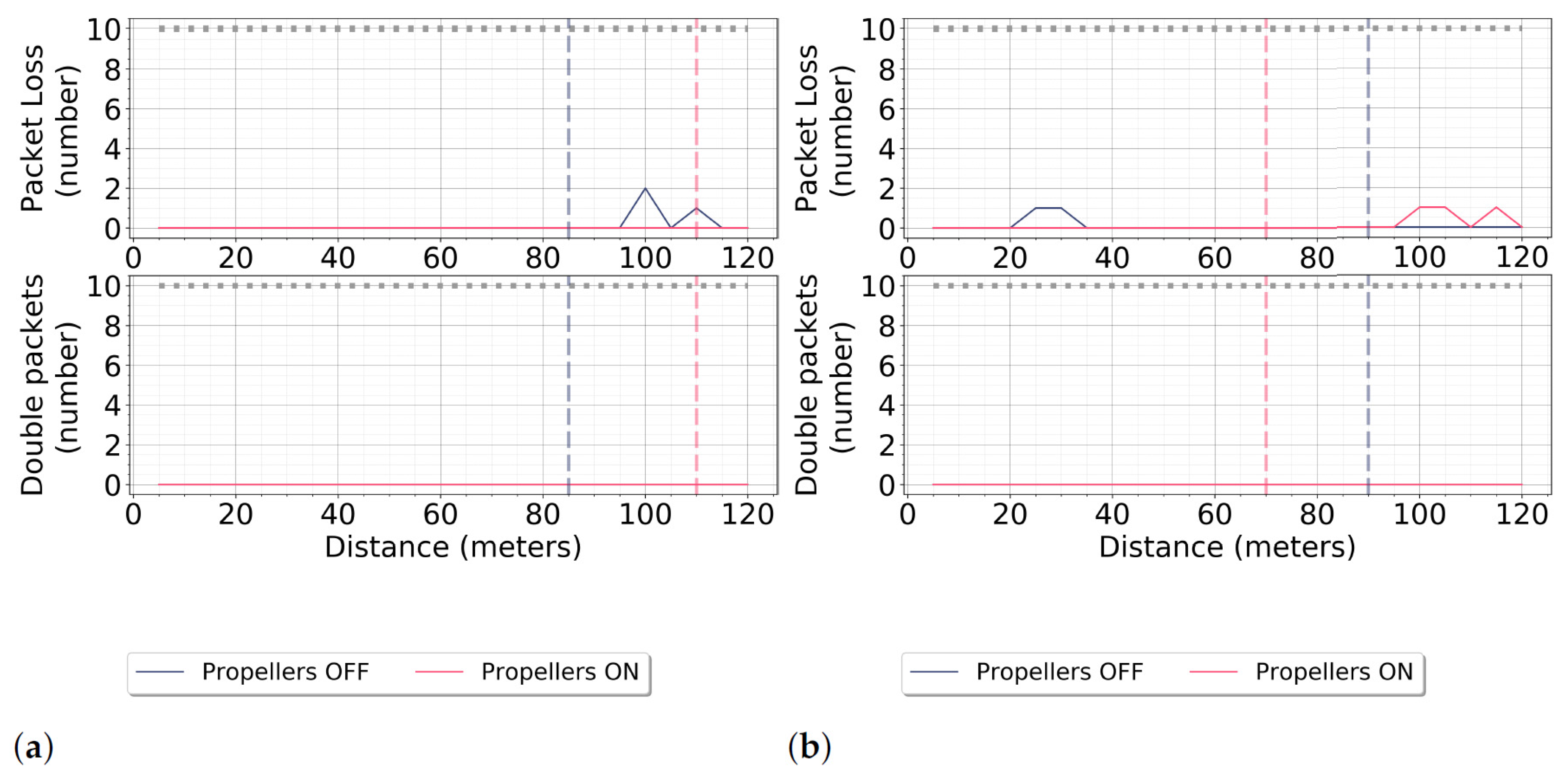
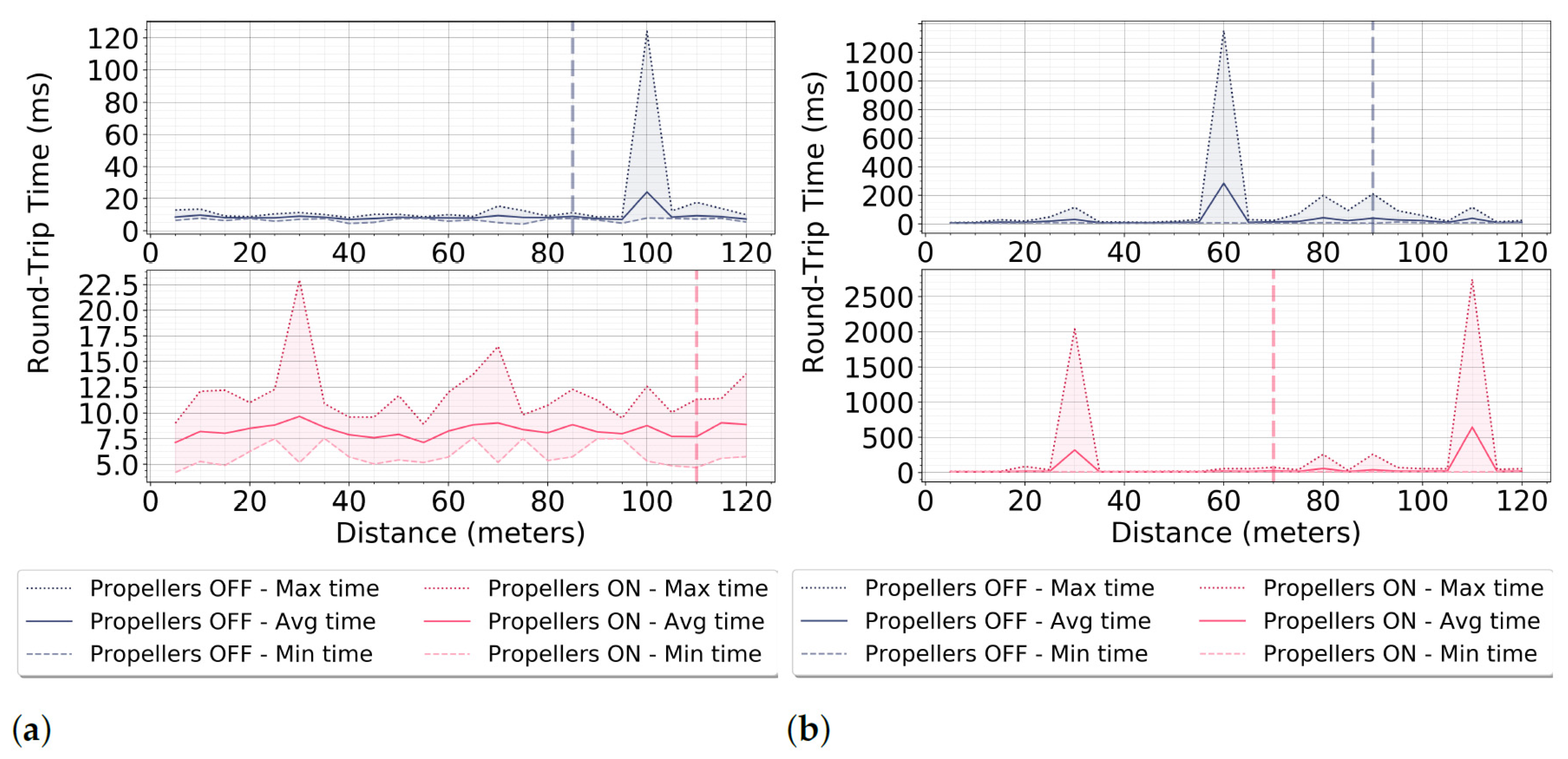
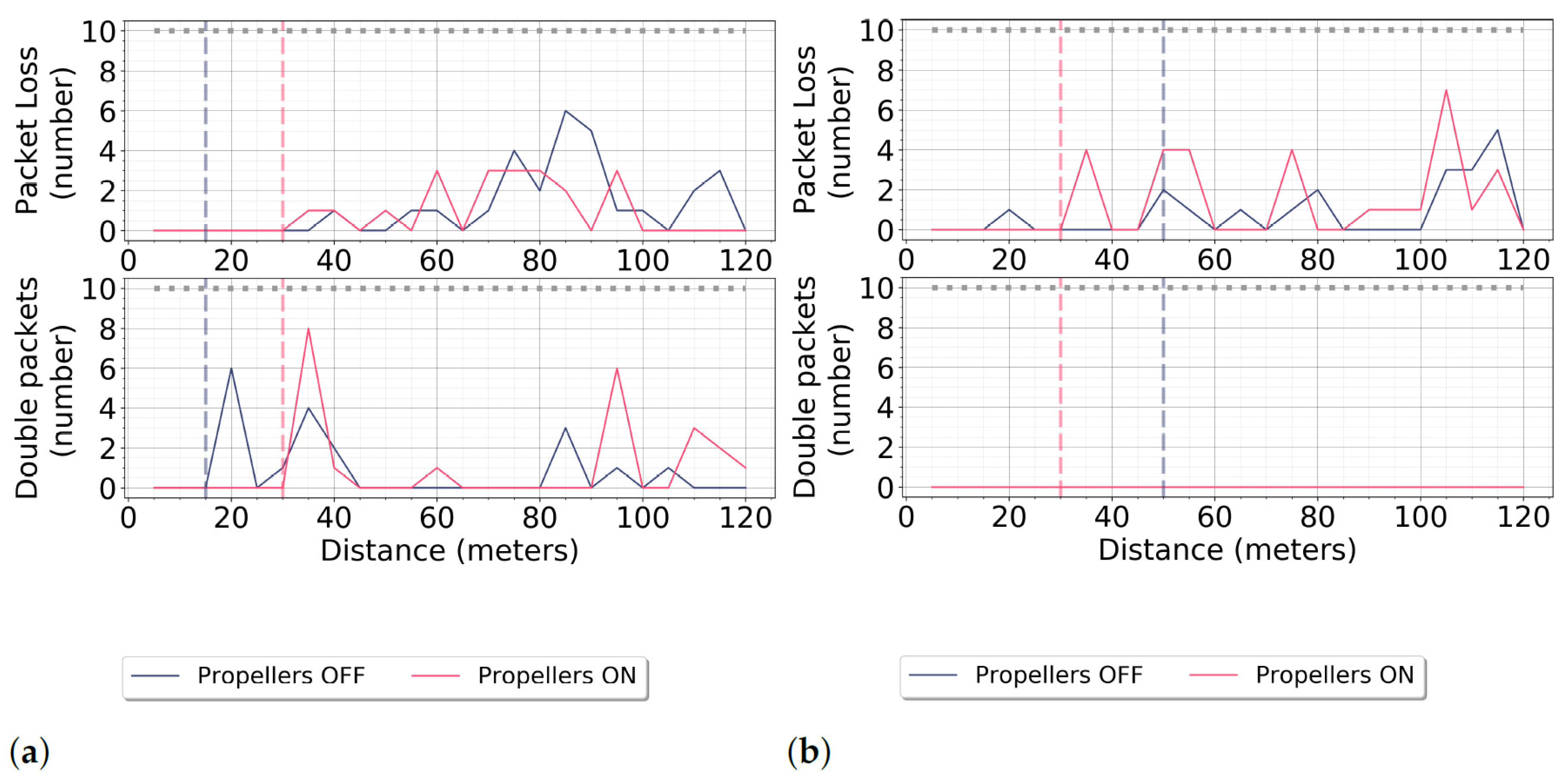
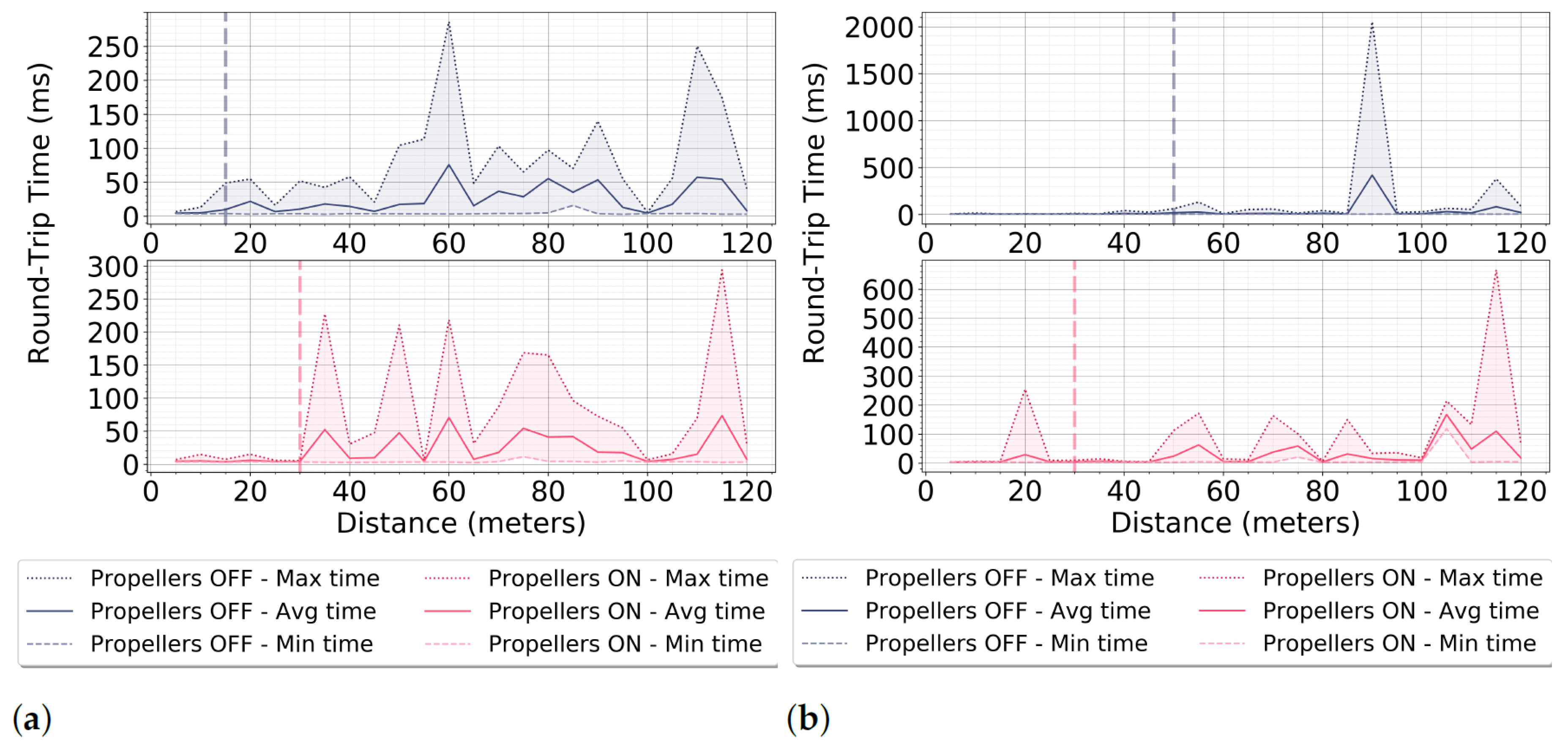
2.3. Maximum Range
Another aspect that was studied was the effect of the greenhouse construction on the maximum flight range that a UAV can fly inside a greenhouse. The aim of this experiment is to explore the distance boundaries where a drone can achieve reliable connection with the ground controller unit.
It is important, however, to define the requirements where a connection can be considered reliable. Cameras in UAV applications in indoor farming are an essential system component, and the video quality was considered one of the most important requirements, especially for cases where crucial visual aided algorithms were employed, such as VSLAMs [
5,
32]. Usually, the video quality is proportional to the video bitrate, the higher the quality, the more data need to be transferred.
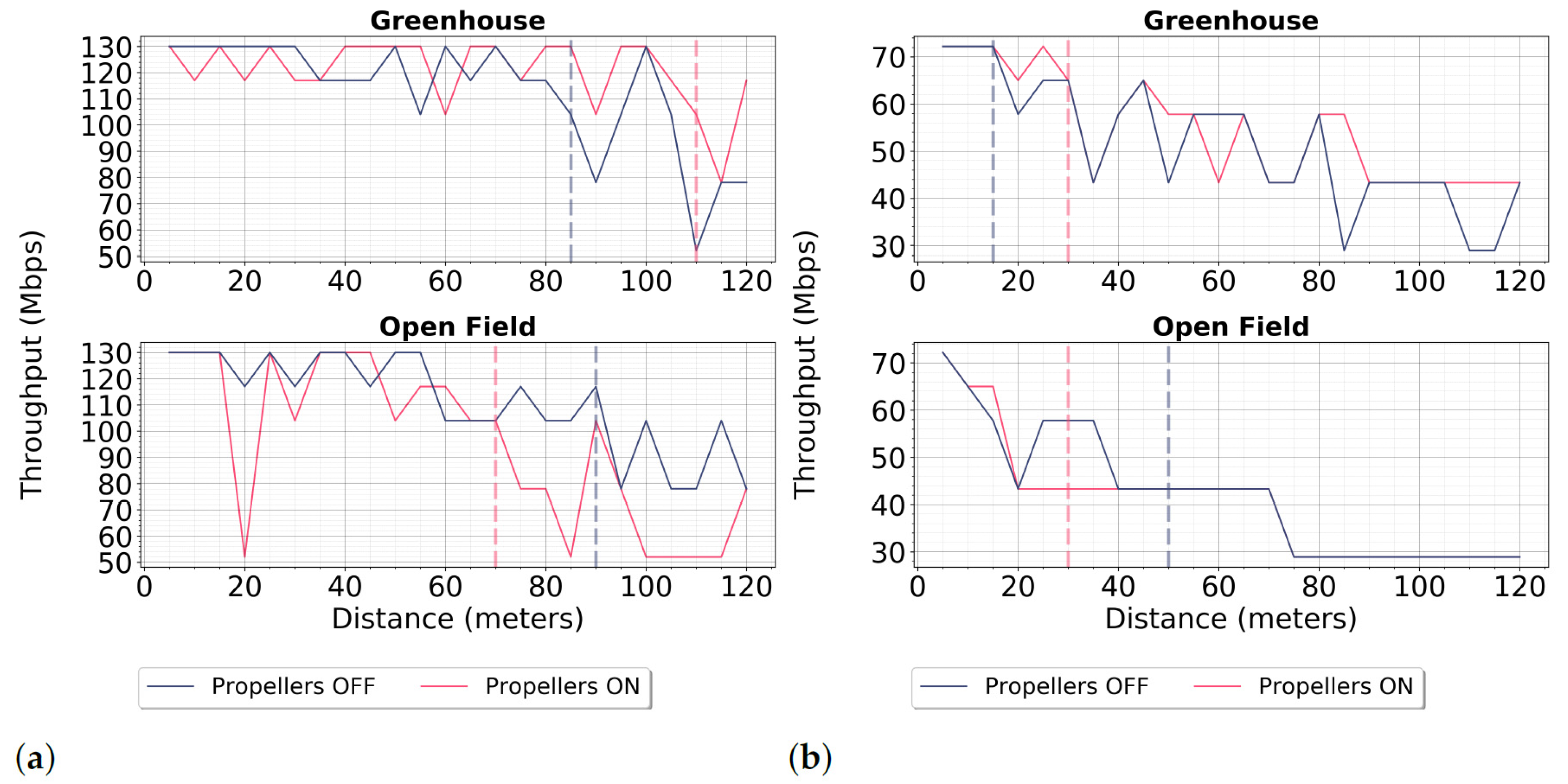
One of the characteristics of the Wi-Fi communications is the data rate, or throughput, which indicates the amount of data that can be transferred between the clients. Since both the UAVs used in this study communicate using Wi-Fi, it is important to ensure that the video data can be transmitted to the ground station by taking into account the connection data rate. By design, both drones employ dynamic video compression to reduce the video quality when the data rate is not adequate for the data transmission.
In order to ensure highest video quality transmission, we consider the maximum video bitrate the UAVs can achieve as the minimum data rate required by the Wi-Fi connection to transfer the data. For the evaluation of the maximum distance that a UAV can fly without video quality loss, the data rate of the connection is used as the main Quality of Service (QoS) parameter.
Several studies have attempted to examine the throughput between different 802.11 standards in different environments. For instance, the authors of [
26,
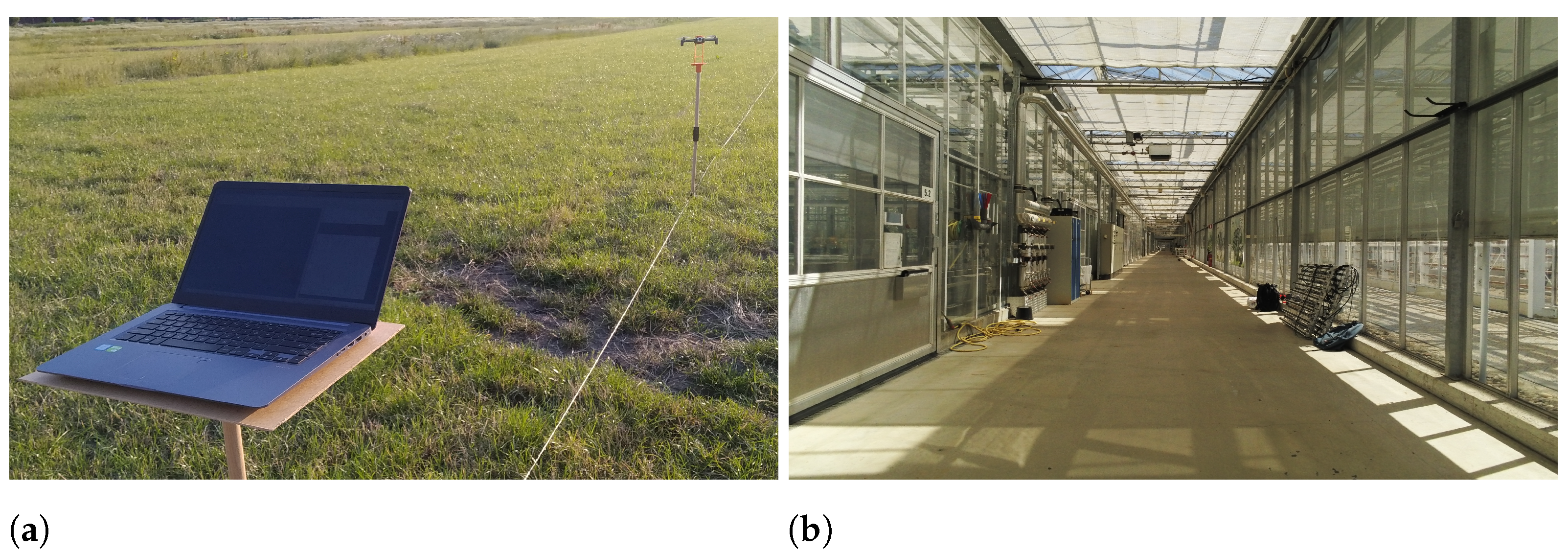
27] found that the IEEE 802.11n is susceptible to interference, and as a result, the throughput is affected significantly. Since the UAVs used in this study support only IEEE 802.11n, experiments were conducted in two different environments, first an open field, and second a real-world greenhouse corridor, as can be seen in
Figure 5a,b, respectively. Although the presence of external Wi-Fi networks around was minimal, the effect of the potential interference caused by the greenhouse structure was studied, and thus, the connection capabilities of each UAV in two environments were compared. For this reason, measurements were carried out every 5 meters, reaching the maximum distance of 120 meters away from the controller unit.
4. Discussion
During real operation, the UAVs were able to navigate freely in space, and this is a dynamic process that can affect the signal propagation. However, the greenhouse is a GPS-denied environment which means that there is significant error during flights, and keeping a constant position is challenging. We performed some test flights with the drones using only the onboard IMU and the compass, but the drift had even greater effect. In addition, it was not possible to take measurements on a fixed throttle without constraining the drones physically. Other options such as hanging the drones using strings were explored, but this was highly impractical. Therefore, we performed our measurements using fixing brackets carefully designed to have as minimal an impact as possible on the connection characteristics of each platform. Performing simulations on this particular environment was not an option either, since most parameters regarding the greenhouse contraction and materials used were unknown.
This study focused on the connection characteristics of two UAVs in the context of greenhouses and explored the limitations for precision agricultural applications using a non-destructive methodology. Unlikely custom drones designed for particular agricultural uses, off-the-self drones, are not equipped with an interface to allow user access certain system data without destructive reverse engineering of the system.
Further research on bigger greenhouse compartments could provide more conclusive results and validate our findings. Further research should also be conducted to study the effect of the plants on the UAVs’ connection characteristics. Temperature variation and high-humidity conditions may also be studied.
Finally, a path-planning algorithm based on the signal propagation footprint could be used to ensure that the UAVs avoid locations that are prone to connection disturbances. A few researchers have proposed tools to characterize the Wi-Fi signal propagation [
14,
15], but since these tools are designed for buildings such as offices where the structure and the building materials differ significantly from the greenhouse environment, these tools cannot be applied without modifications and scientific validation in the indoor agricultural sector; therefore, further research is required.
5. Conclusions
In this work, we explored the connection characteristics specifically for video-oriented applications of two commercially available off-the-shelf UAVs in the greenhouse environment. Extensive, real-world measurements were conducted, focusing on three main areas: the radiation pattern, the signal propagation inside the greenhouse compartments, and finally the maximum flying range that each drone can achieve without video quality losses in the greenhouse corridor.
From the radiation pattern results, it was found that both UAVs have anisotropic radiation patterns and thus that in RSS, crucial applications’ signal equalization may be required on the receiver side. Furthermore, in some specific orientations, the UAVs are more prone to signal drop and packet loss, and as a result the RTT might increase dramatically. The results also shows that the greenhouse compartment construction does not significantly affect the communication characteristics. However, measurements closer to the roof were more prone to connection issues. Although the Parrot Anafi in all cases had higher RTT than AR.Drone 2.0, it outperformed the AR.Drone 2.0, achieving higher signal strength and higher throughput in all cases.
The measurements in the greenhouse corridor prove that the Parrot Anafi is capable to fly to a distance up to 110 m without compromising any video quality, and the minimum RSS required to achieve this range was −62 dBm. The AR.Drone 2.0 was capable of reaching only a distance up to 30 m from the ground station, while the minimum RSS required was −70 dBm. The above numbers define the empirical boundaries of the specific UAVs and should be taken into account in cases where video crucial applications are employed in similar environments to ensure safe navigation. The effect of the propellers has an insignificant impact on the UAV connection characteristics in all tested scenarios. Finally, between the two UAV used in this study, we concluded that the Parrot Anafi outperforms the AR.Drone 2.0 in almost all cases; therefore, it can be considered a more suitable platform for operations inside greenhouses.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}