
Compact and Efficient Topological Mapping for Large-Scale Environment with Pruned Voronoi Diagram

Abstract
:1. Introduction
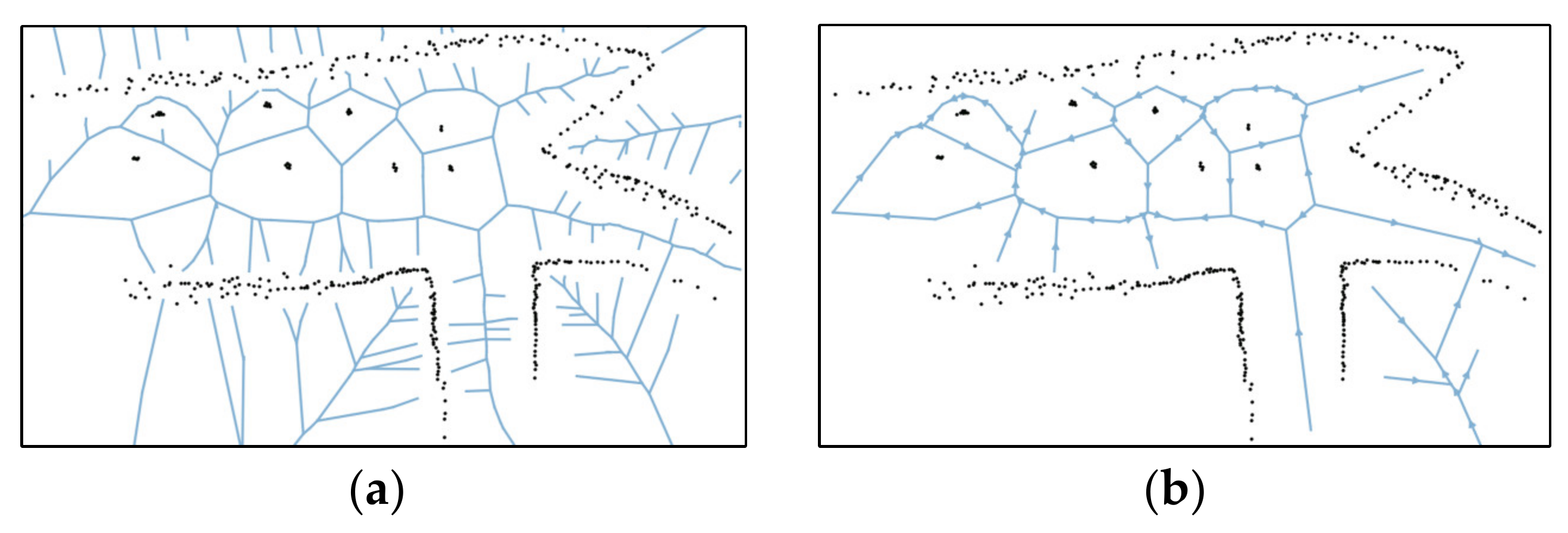
- Compactness: We propose a novel Voronoi diagram pruning strategy, which can extract the road skeleton in the environment in a sufficiently compact way.
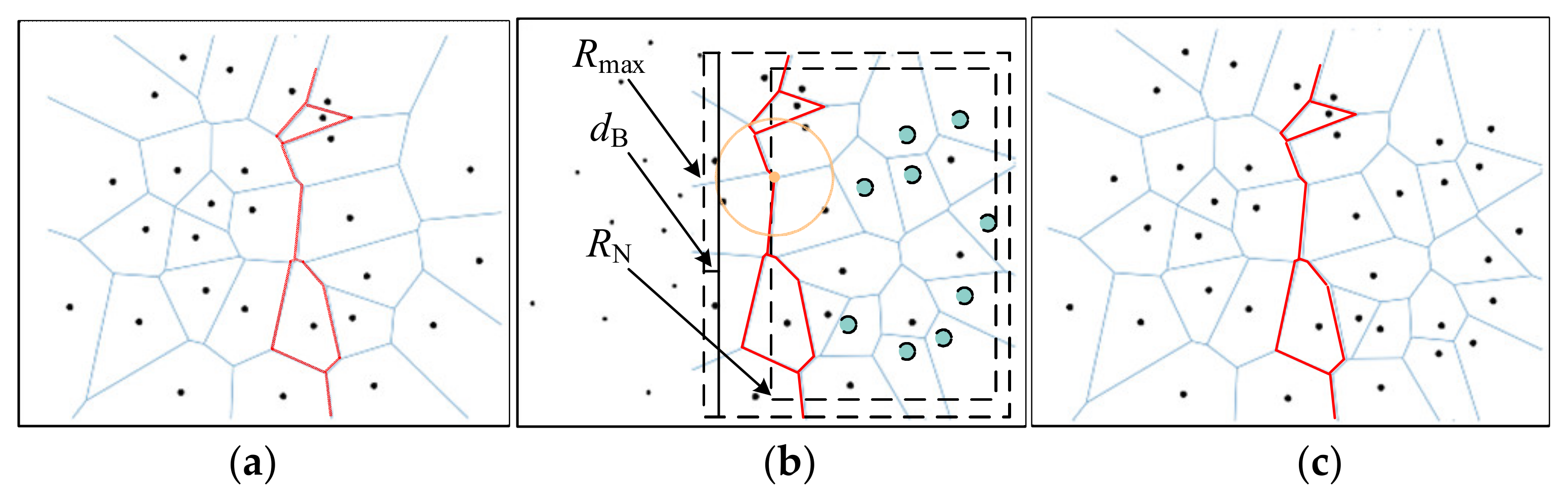
- Efficiency: Based on the largest empty circle property of the Voronoi diagram, we propose a novel method to incrementally update the topological map in the changed region rather than the whole map. Even in large-scale and complex environments, the map can still maintain efficiency in real-time.
2. Pruned Voronoi Graph Construction
2.1. Voronoi Diagram
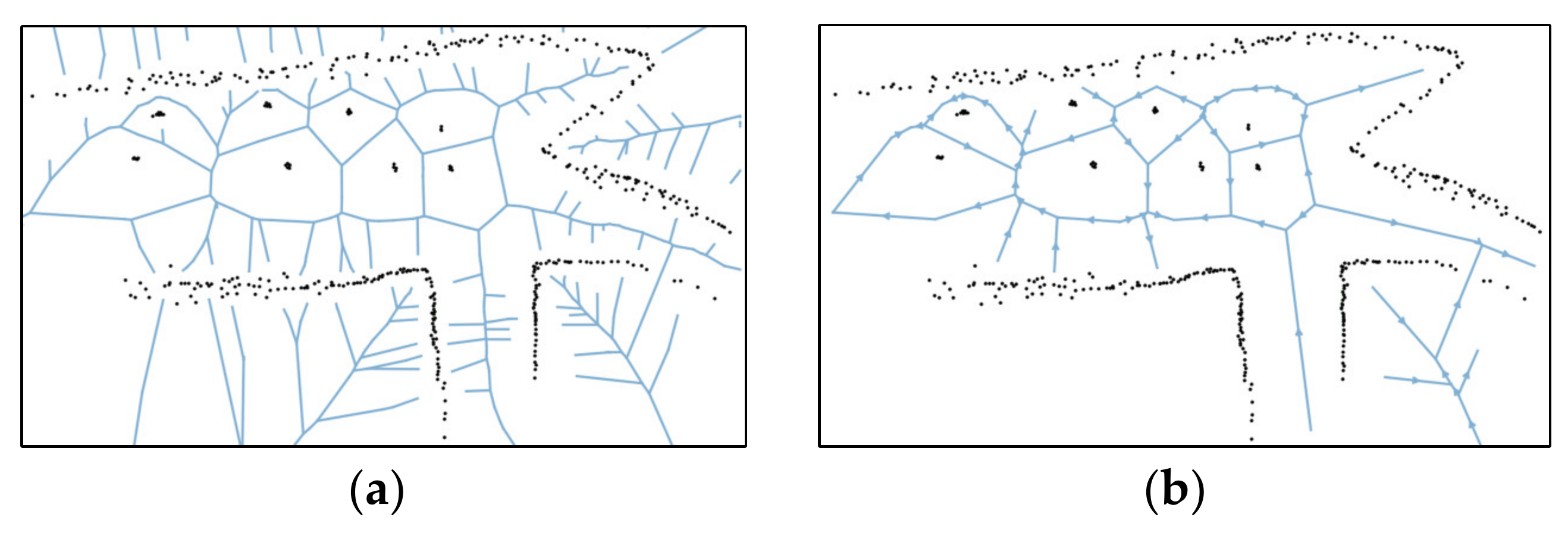
2.2. Pruned Voronoi Graph
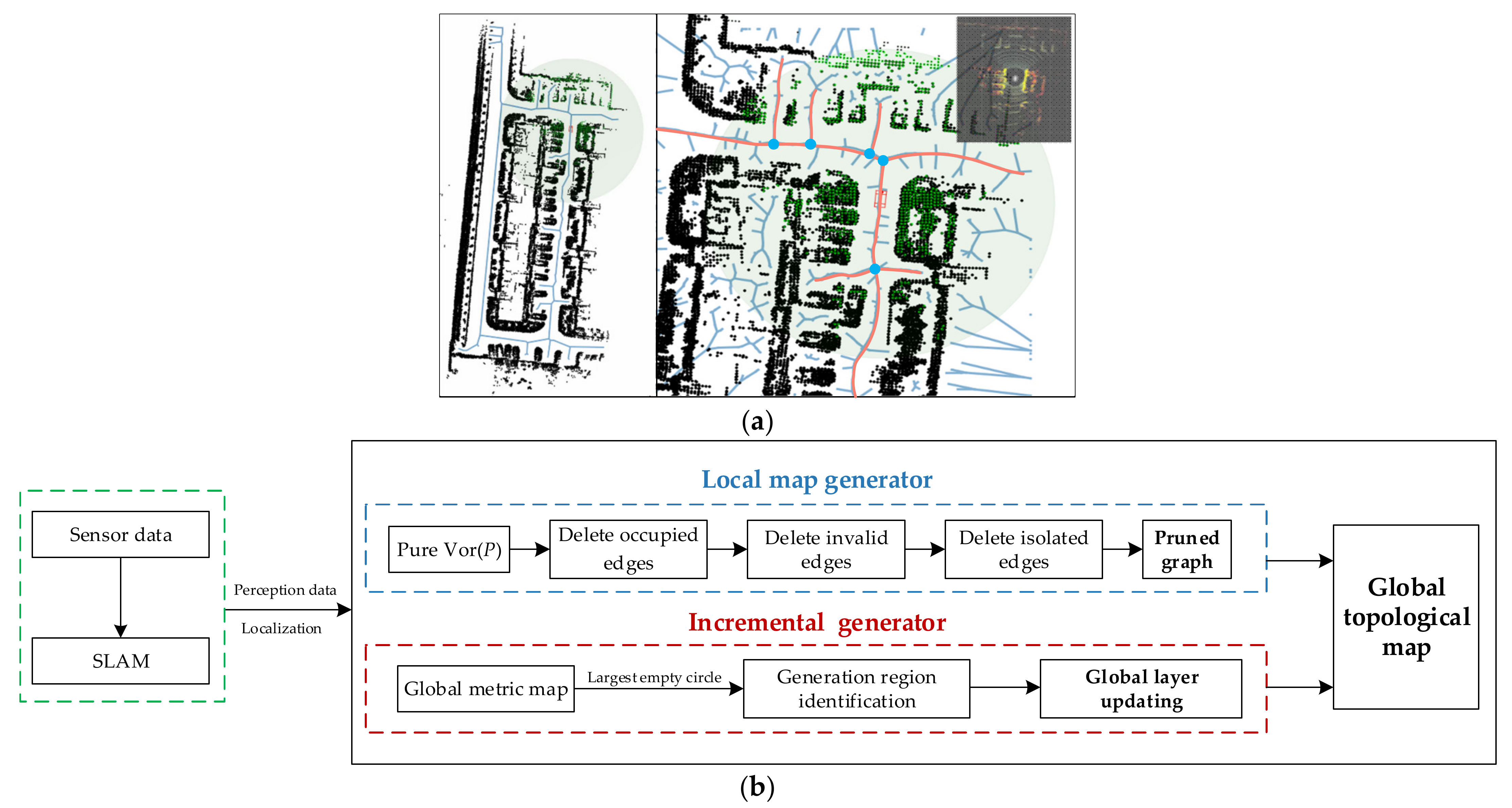
3. Incremental Topological Map Generator
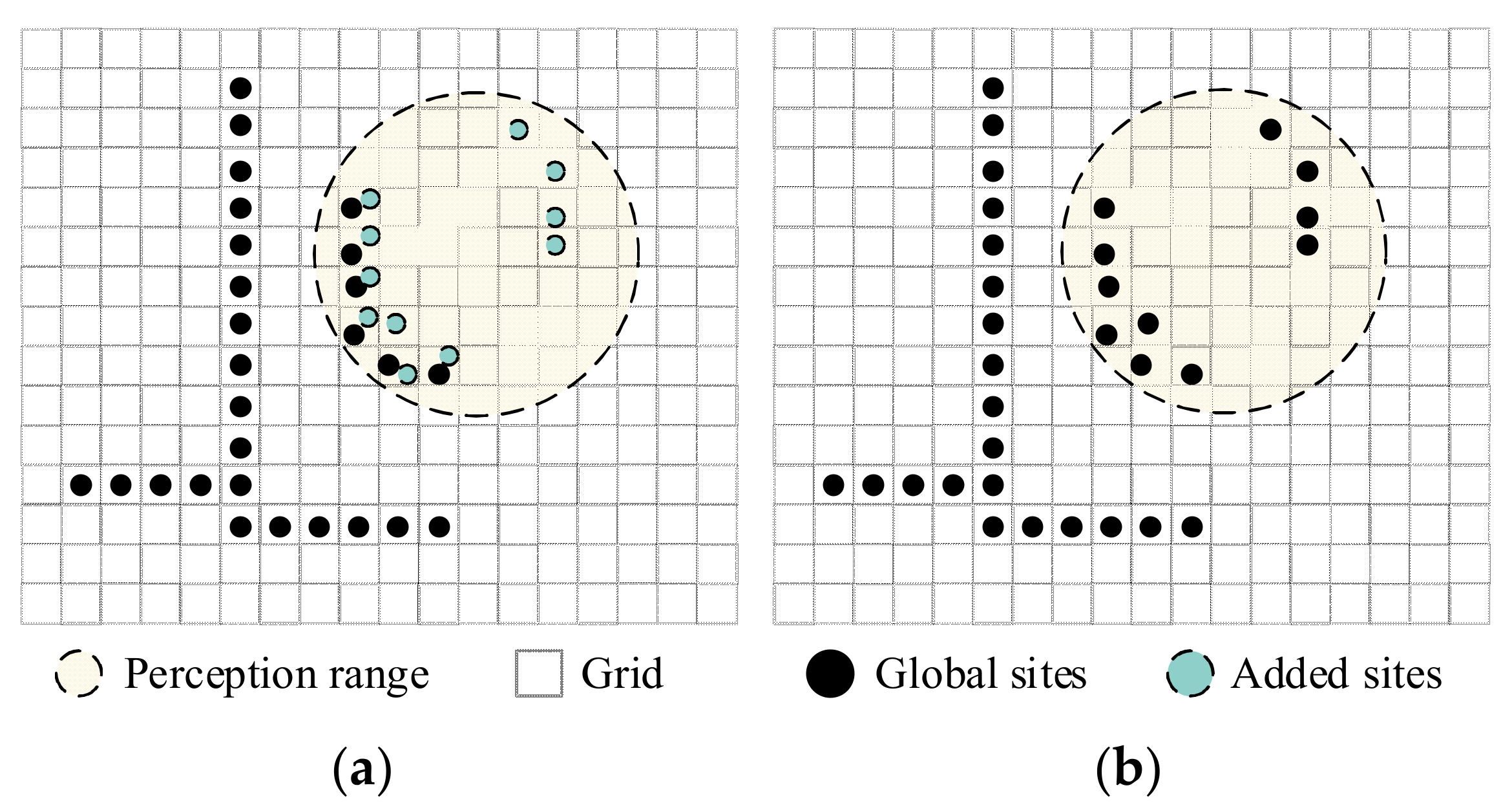
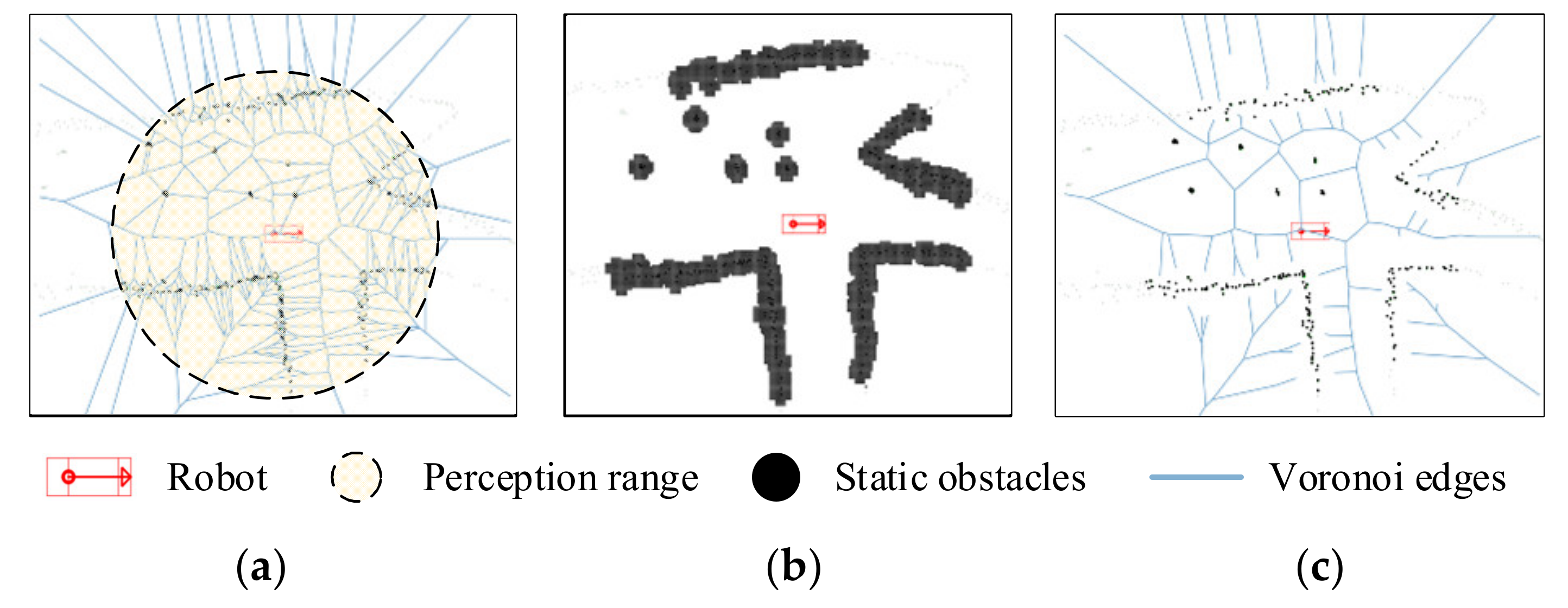
3.1. Perception Data Update
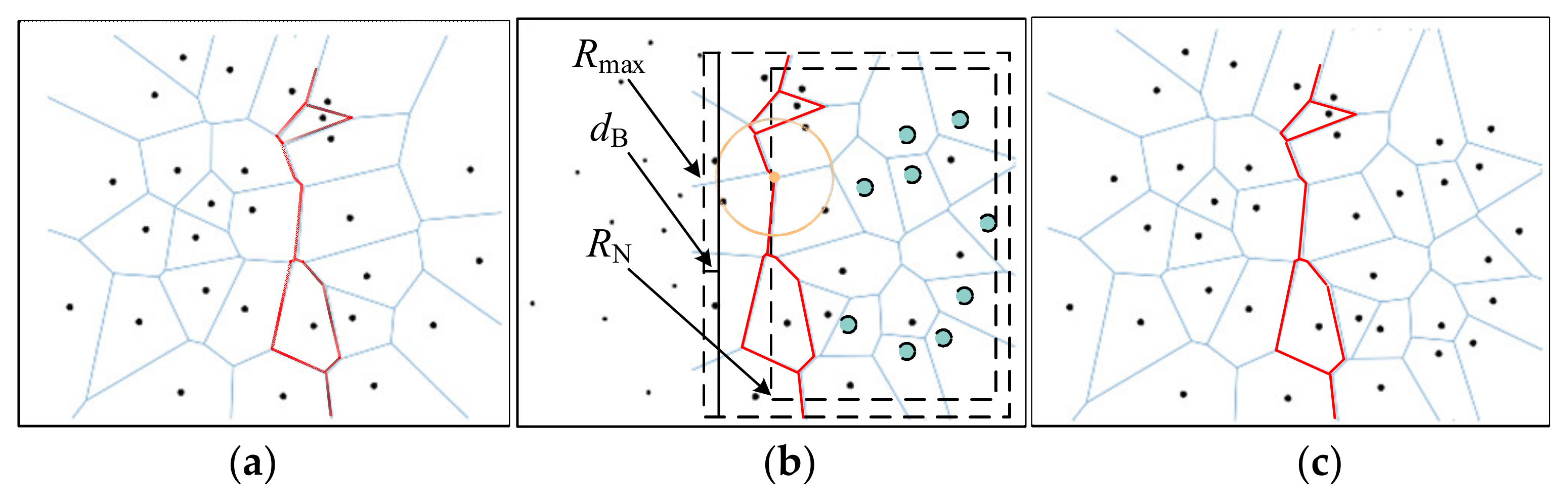
3.2. Voronoi Diagram Generation Region Identification
3.3. Global Layer Update
4. Results
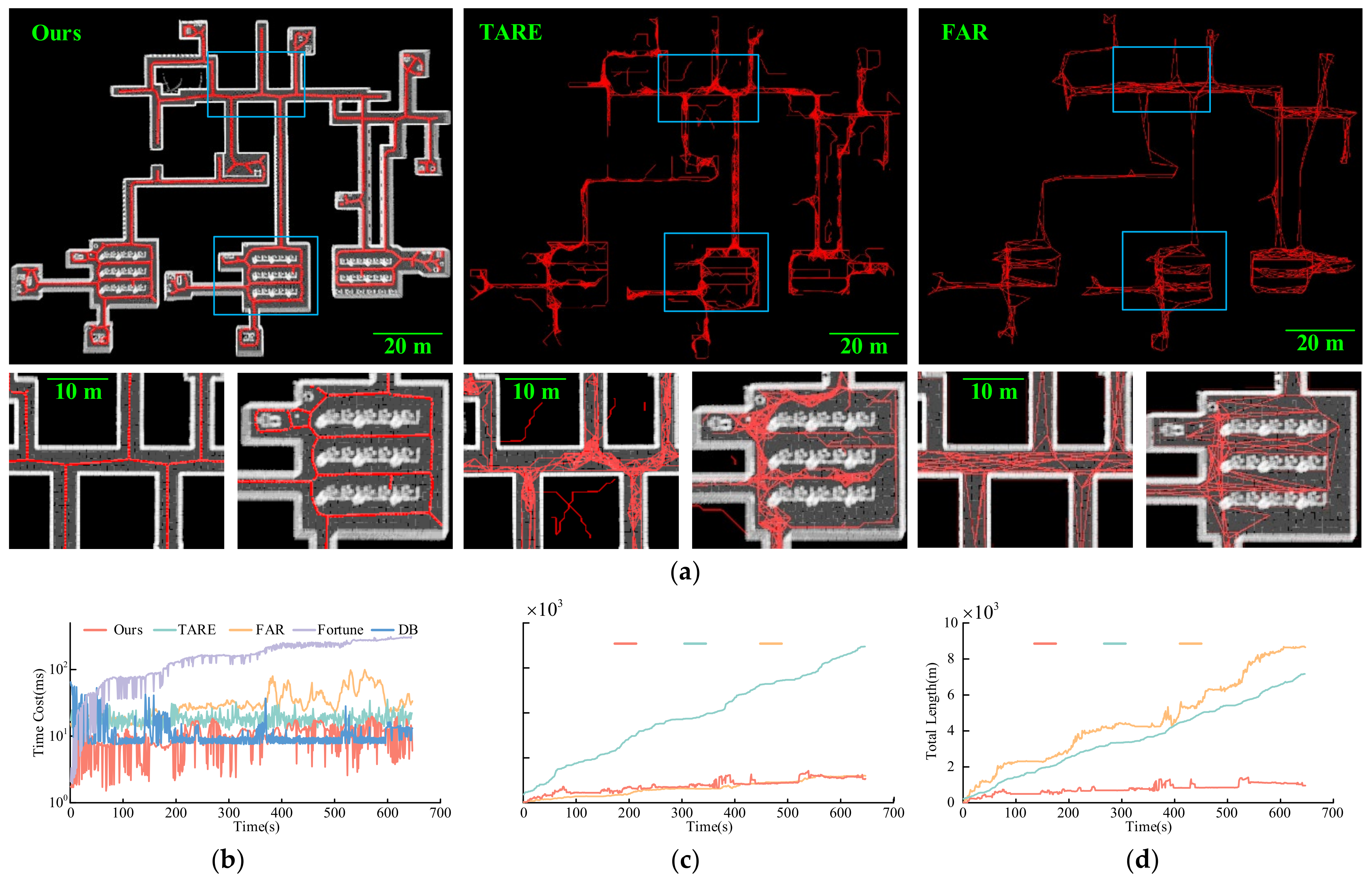
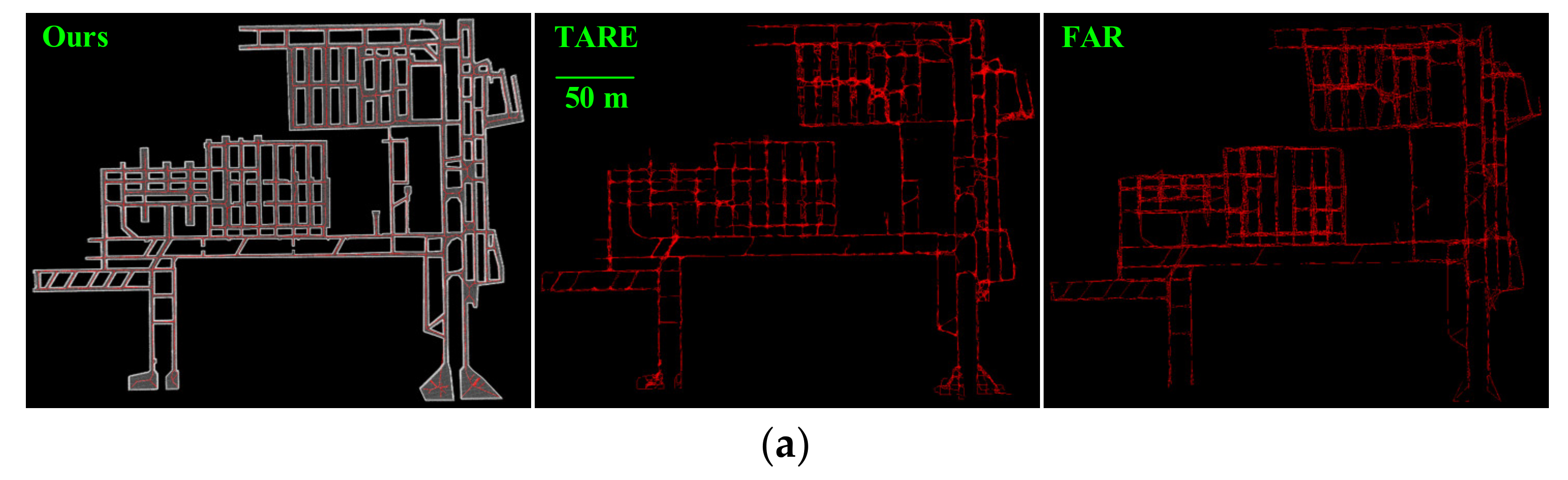
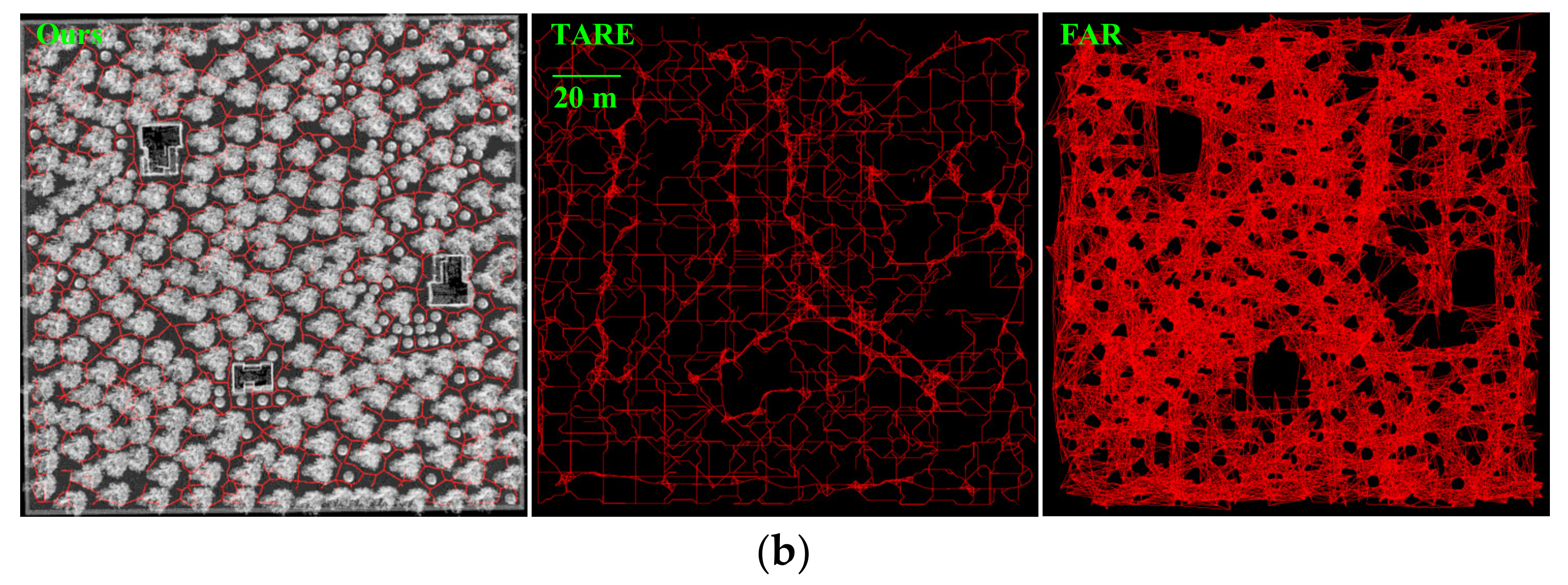
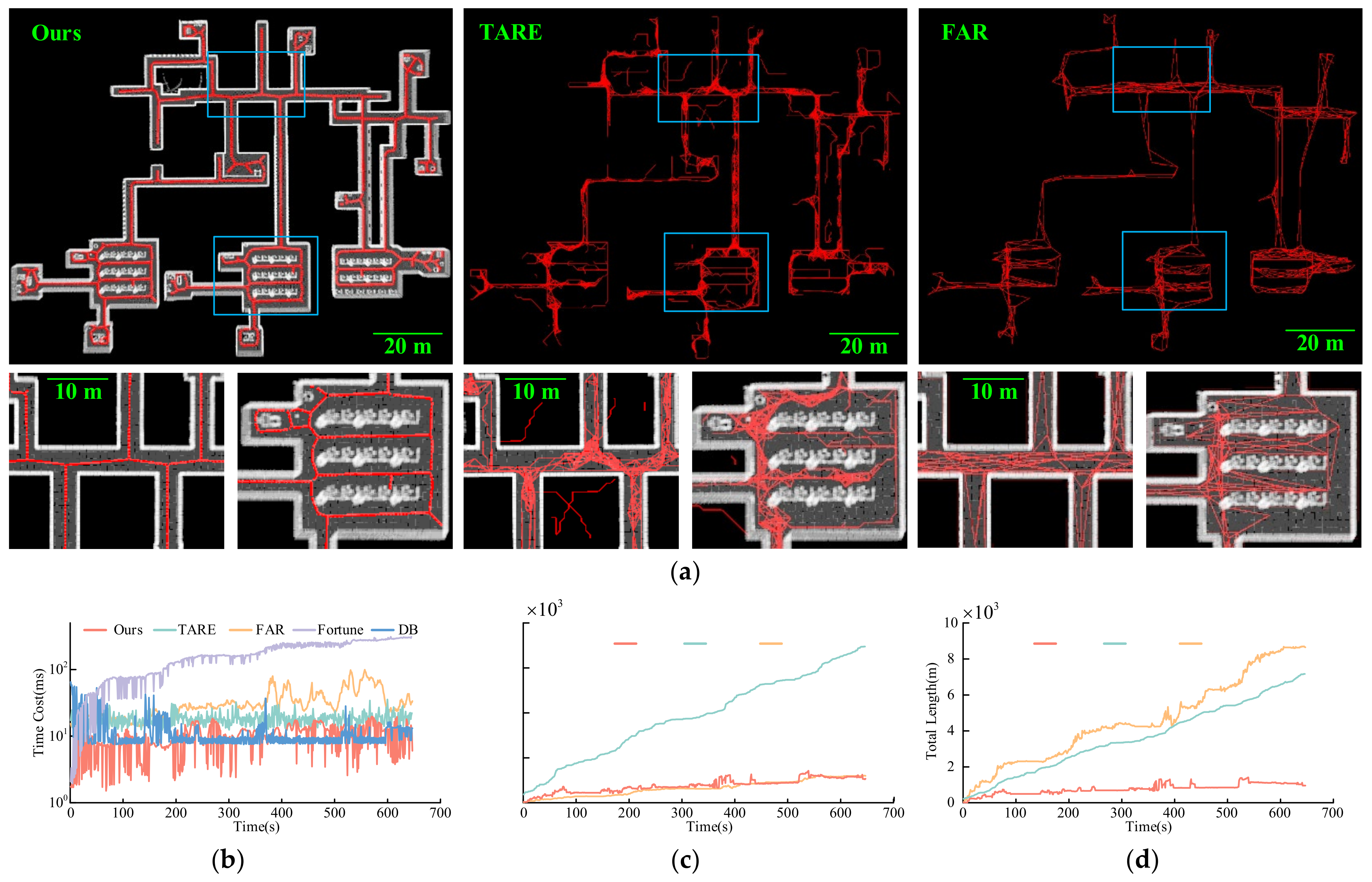
4.1. Benchmark Experimental Results
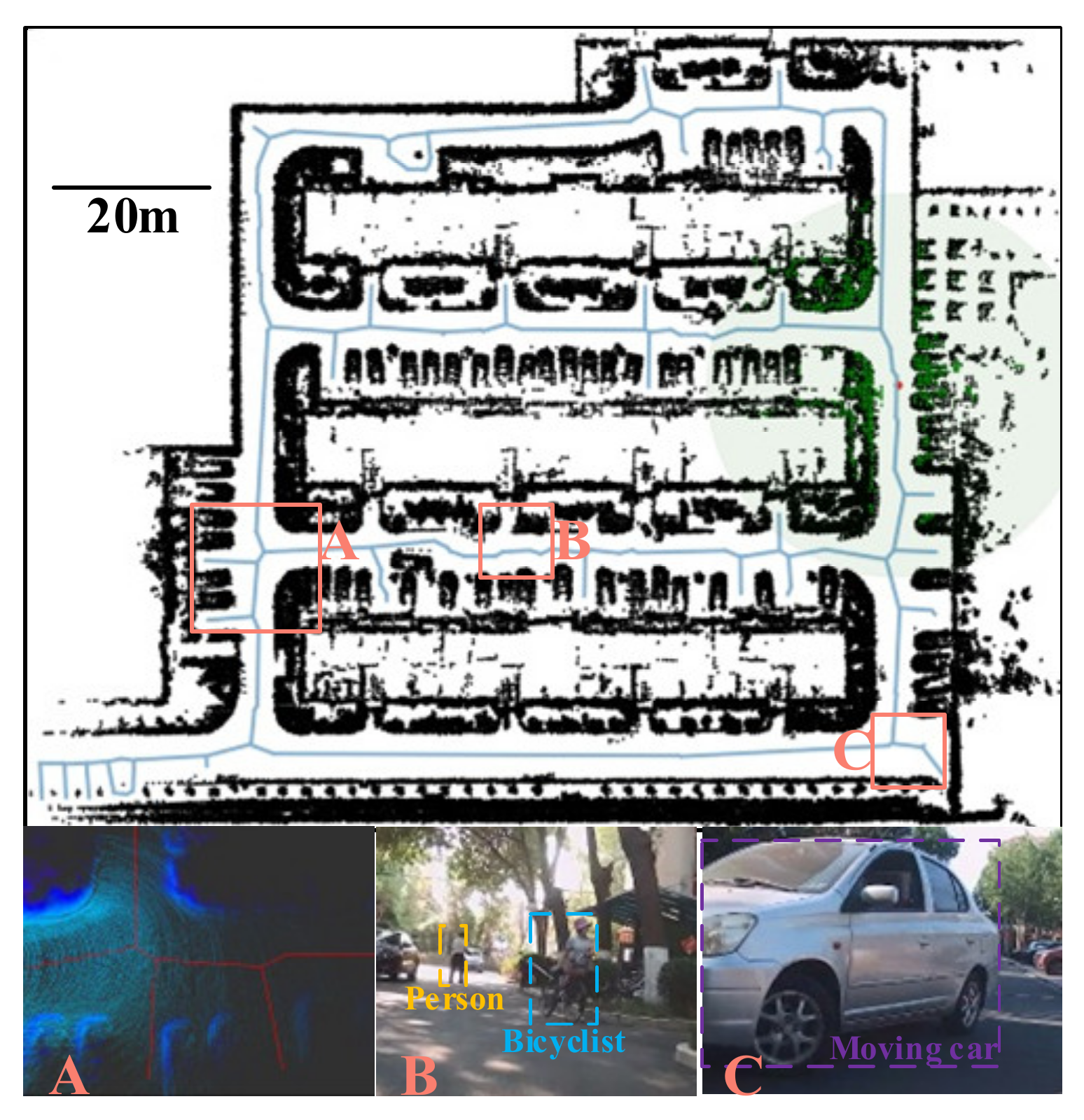
4.2. Physical Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blochliger, F.; Fehr, M.; Dymczyk, M.; Schneider, T. Topomap: Topological Mapping and Navigation Based on Visual SLAM Maps. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 3818–3825. [Google Scholar]
- Gupta, A.; Fernando, X. Simultaneous Localization and Mapping (SLAM) and Data Fusion in Unmanned Aerial Vehicles: Recent Advances and Challenges. Drones 2022, 6, 85. [Google Scholar] [CrossRef]
- Liu, M.; Colas, F.; Oth, L.; Siegwart, R. Incremental Topological Segmentation for Semi-structured Environments Using Discretized GVG. Auton. Robot. 2015, 38, 143–160. [Google Scholar] [CrossRef]
- Ai, M.; Li, Z.; Shan, J. Topologically Consistent Reconstruction for Complex Indoor Structures from Point Clouds. Remote Sens. 2021, 13, 3844. [Google Scholar] [CrossRef]
- Tsardoulias, E.G.; Iliakopoulou, A.; Kargakos, A.; Petrou, L. A Review of Global Path Planning Methods for Occupancy Grid Maps Regardless of Obstacle Density. J. Intell. Robot. Syst. 2016, 84, 829–858. [Google Scholar] [CrossRef]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic Roadmaps for Path Planning in High-dimensional Configuration Spaces. IEEE Trans. Robot. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Dobson, A.; Bekris, K.E. Improving Sparse Roadmap Spanners. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 4106–4111. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J. Rapidly-exploring Random Trees: Progress and Prospects. In Algorithmic and Computational Robotics: New Directions, 1st ed.; CRC Press: Boca Raton, FL, USA, 2001; pp. 293–308. [Google Scholar]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Informed RRT*: Optimal Sampling-based Path Planning Focused via Direct Sampling of an Admissible Ellipsoidal Heuristic. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 2997–3004. [Google Scholar]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Batch Informed Trees (BIT*): Sampling-based Optimal Planning via the Heuristically Guided Search of Implicit Random Geometric Graphs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3067–3074. [Google Scholar]
- Witting, C.; Fehr, M.; Bähnemann, R.; Oleynikova, H. History-aware Autonomous Exploration in Confined Environments using MAVs. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Umari, H.; Mukhopadhyay, S. Autonomous Robotic Exploration Based on Multiple Rapidly-exploring Randomized Trees. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1396–1402. [Google Scholar]
- Cao, C.; Zhu, H.; Choset, H.; Zhang, J. TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments. In Proceedings of the Robotics: Science and Systems, Virtual, 12–16 July 2021. [Google Scholar]
- Wang, C.; Chi, W.; Sun, Y.; Meng, M.Q.H. Autonomous Robotic Exploration by Incremental Road Map Construction. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1720–1731. [Google Scholar] [CrossRef]
- Dang, T.; Tranzatto, M.; Khattak, S.; Mascarich, F. Graph-based Subterranean Exploration Path Planning Using Aerial and Legged Robots. J. Field Robot. 2020, 37, 1363–1388. [Google Scholar] [CrossRef]
- Lacasa, L.; Luque, B.; Ballesteros, F.; Luque, J. From Time Series to Complex Networks: The Visibility Graph. Proc. Natl. Acad. Sci. USA 2008, 105, 4972–4975. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, F.; Cao, C.; Zhu, H.; Oh, J.; Zhang, J. FAR Planner: Fast, Attemptable Route Planner using Dynamic Visibility Update. arXiv 2021, arXiv:2110.09460. [Google Scholar]
- Lee, W.; Choi, G.H.; Kim, T.W. Visibility Graph-based Path-planning Algorithm with Quadtree Representation. Appl. Ocean Res. 2021, 117, 102887. [Google Scholar] [CrossRef]
- Shah, B.C.; Gupta, S.K. Long-Distance Path Planning for Unmanned Surface Vehicles in Complex Marine Environment. J. Ocean. Eng. 2019, 45, 813–830. [Google Scholar] [CrossRef]
- Thrun, S. Learning Metric-topological Maps for Indoor Mobile Robot Navigation. Artif. Intell. 1998, 99, 21–71. [Google Scholar] [CrossRef] [Green Version]
- Said, H.B.; Marie, R.; Stéphant, J.; Labbani-Igbida, O. Skeleton-Based Visual Servoing in Unknown Environments. IEEE ASME Trans. Mechatron. 2018, 23, 2750–2761. [Google Scholar] [CrossRef]
- Li, L.; Zuo, X.; Peng, H.; Yang, F. Improving Autonomous Exploration Using Reduced Approximated Generalized Voronoi Graphs. J. Intell. Robot. Syst. 2020, 99, 91–113. [Google Scholar] [CrossRef]
- Ok, K.; Ansari, S.; Gallagher, B.; Sica, W. Path Planning with Uncertainty: Voronoi Uncertainty Fields. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 4596–4601. [Google Scholar]
- Fortune, S. A Sweepline Algorithm for Voronoi Diagrams. Algorithmica 1987, 2, 153–174. [Google Scholar] [CrossRef]
- Lau, B.; Sprunk, C.; Burgard, W. Improved Updating of Euclidean Distance Maps and Voronoi Diagrams. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 281–286. [Google Scholar]
- Kalra, N.; Ferguson, D.; Stentz, A. Incremental Reconstruction of Generalized Voronoi Diagrams on Grids. Robot. Auton. Syst. 2009, 57, 123–128. [Google Scholar] [CrossRef] [Green Version]
- Guibas, L.J.; Knuth, D.E.; Sharir, M. Randomized Incremental Construction of Delaunay and Voronoi Diagrams. Algorithmica 1992, 7, 381–413. [Google Scholar] [CrossRef]
- Edwards, J.; Daniel, E.; Pascucci, V.; Bajaj, C. Approximating the Generalized Voronoi Diagram of Closely Spaced Objects. Comput. Graph. Forum 2015, 34, 299–309. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Autonomous Exploration Development Environment. Available online: https://www.cmu-exploration.com/development-environment (accessed on 10 April 2022).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Fortune | DB | TARE | FAR | Ours |
|---|---|---|---|---|---|
| indoor (ms) | 169.48 | 11.73 | 18.16 | 32.51 | 9.86 |
| tunnel (ms) | 3826.27 | 26.56 | 25.13 | 43.87 | 13.20 |
| forest (ms) | 1214.45 | 13.59 | 15.30 | 706.06 | 13.70 |
| average (ms) | 1376.8 | 17.30 | 19.53 | 260.81 | 12.25 |
| Scenario | TARE | FAR | Ours |
|---|---|---|---|
| indoor | 1737 | 301 | 267 |
| tunnel | 5641 | 928 | 781 |
| forest | 3513 | 4427 | 2801 |
| Scenario | TARE | FAR | Ours |
|---|---|---|---|
| indoor (km) | 7.12 | 8.65 | 0.96 |
| tunnel (km) | 26.28 | 50.45 | 5.23 |
| forest (km) | 13.83 | 213.871 | 4.83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, Y.; Wang, R.; He, B.; Lu, F.; Xu, Y. Compact and Efficient Topological Mapping for Large-Scale Environment with Pruned Voronoi Diagram. Drones 2022, 6, 183. https://doi.org/10.3390/drones6070183
Qi Y, Wang R, He B, Lu F, Xu Y. Compact and Efficient Topological Mapping for Large-Scale Environment with Pruned Voronoi Diagram. Drones. 2022; 6(7):183. https://doi.org/10.3390/drones6070183
Chicago/Turabian StyleQi, Yao, Rendong Wang, Binbing He, Feng Lu, and Youchun Xu. 2022. "Compact and Efficient Topological Mapping for Large-Scale Environment with Pruned Voronoi Diagram" Drones 6, no. 7: 183. https://doi.org/10.3390/drones6070183
APA StyleQi, Y., Wang, R., He, B., Lu, F., & Xu, Y. (2022). Compact and Efficient Topological Mapping for Large-Scale Environment with Pruned Voronoi Diagram. Drones, 6(7), 183. https://doi.org/10.3390/drones6070183