
Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations


Abstract
:1. Introduction
“To take off, flying vehicles first need places to land”[1]
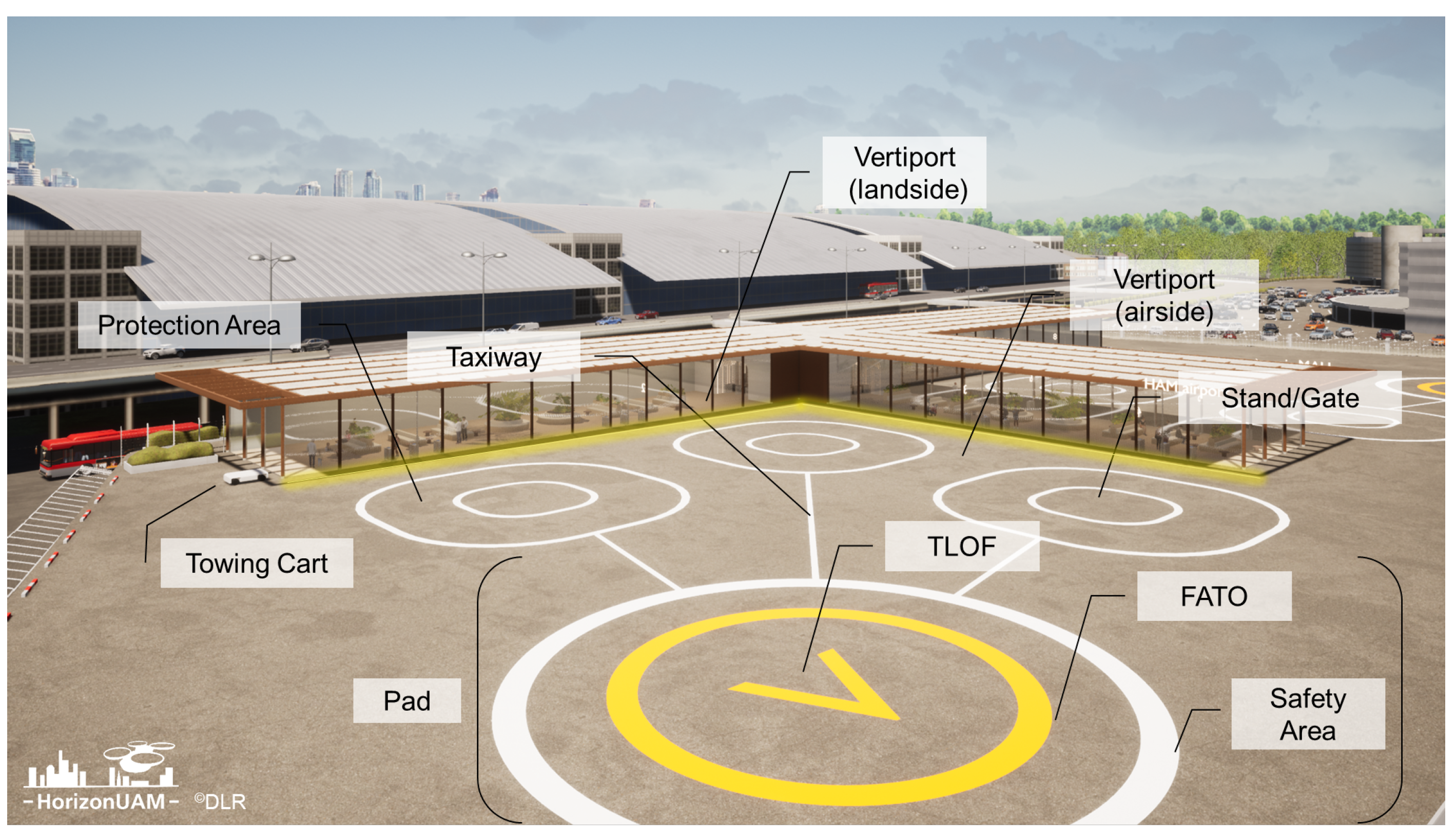
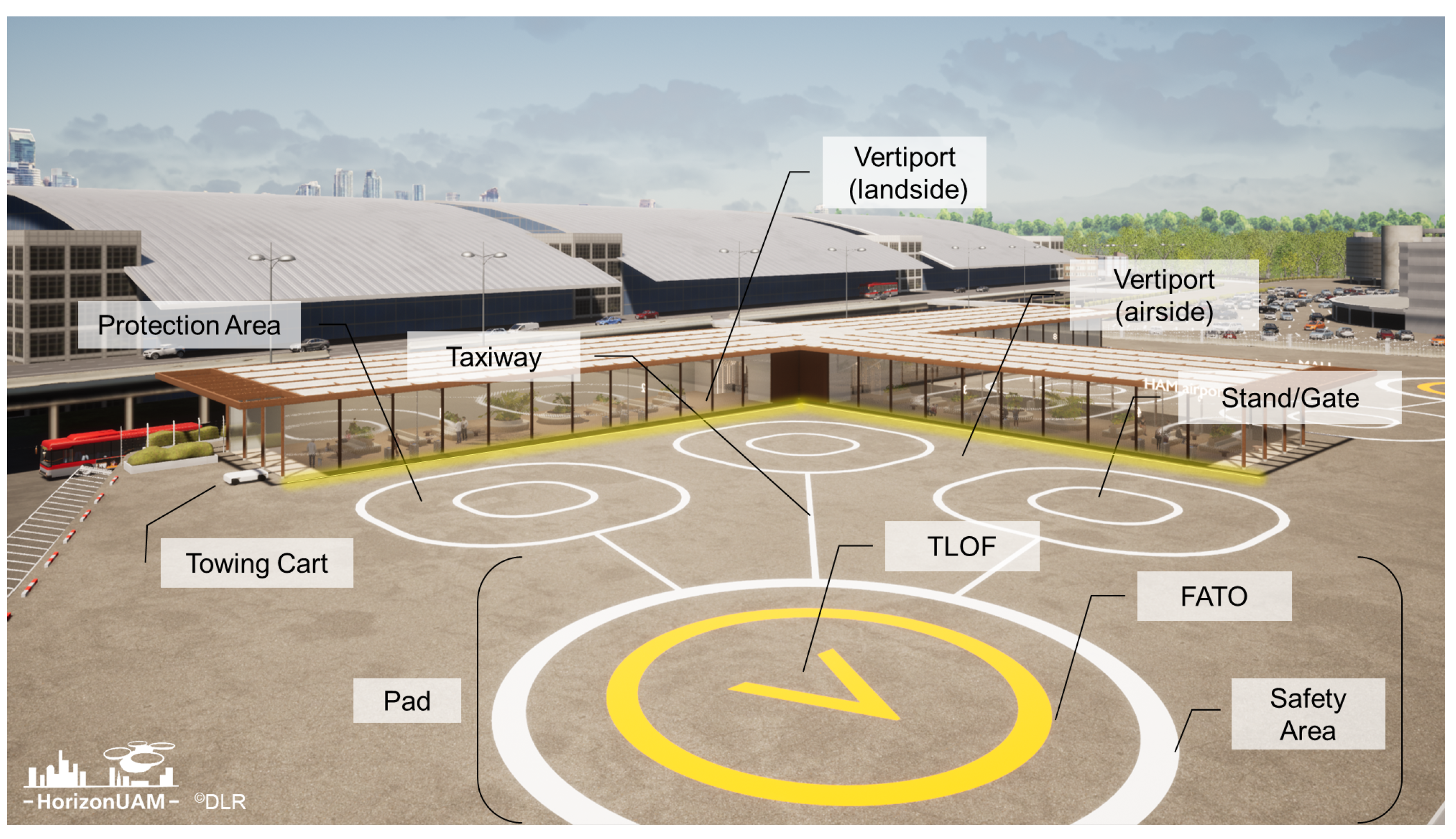
1.1. Taxonomy of UAM Ground Infrastructure
1.1.1. Regulatory and Standardization Context
1.1.2. Commercial and Research Context
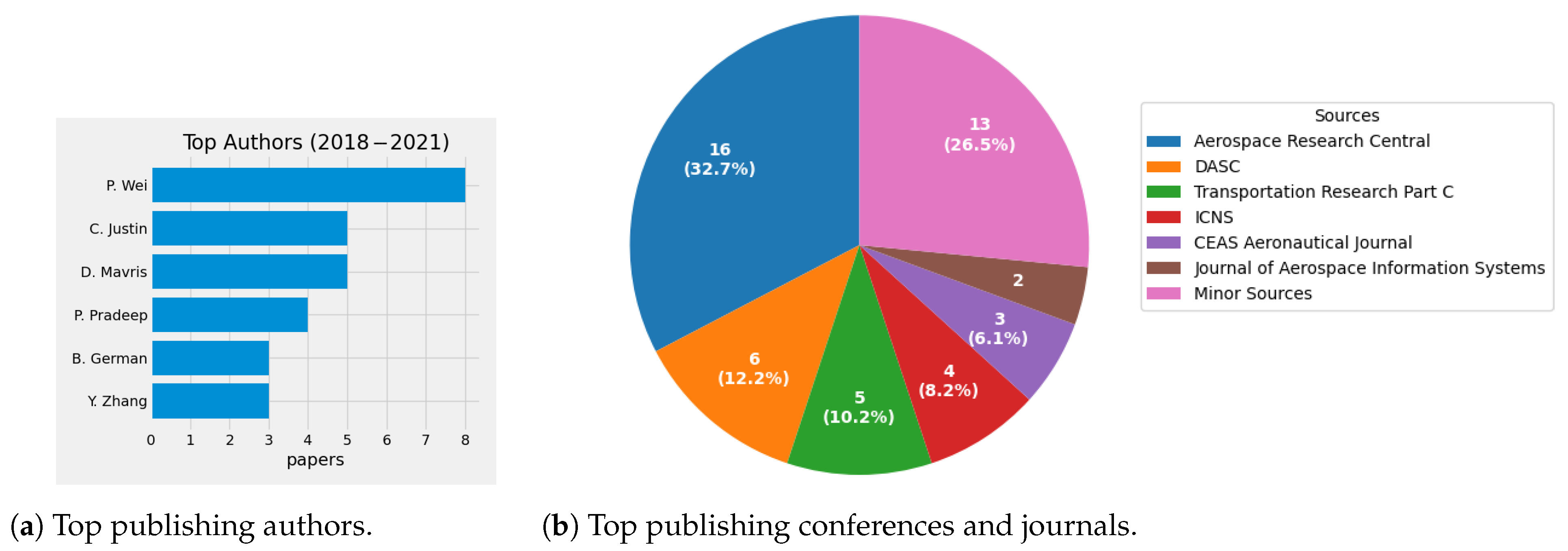
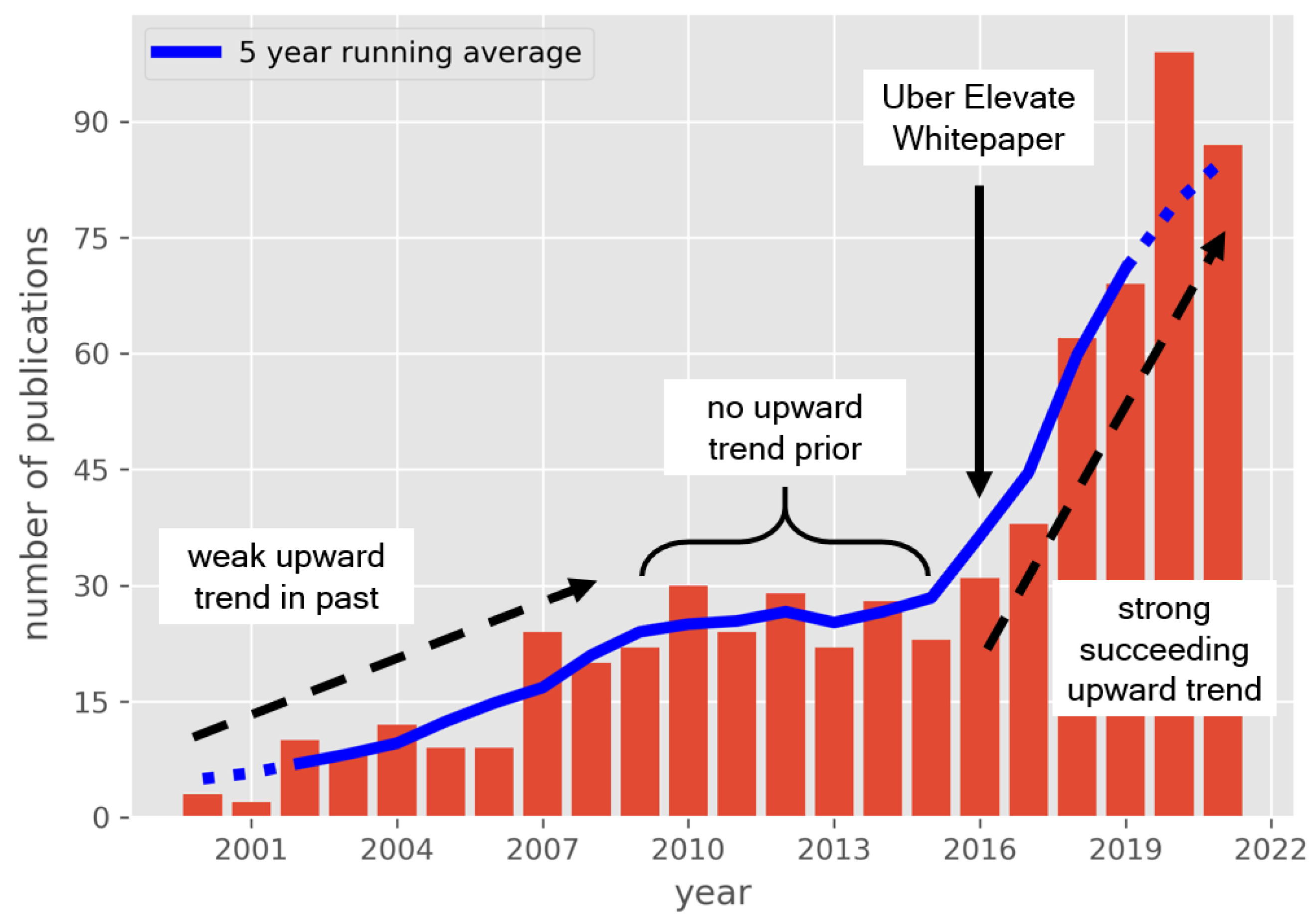
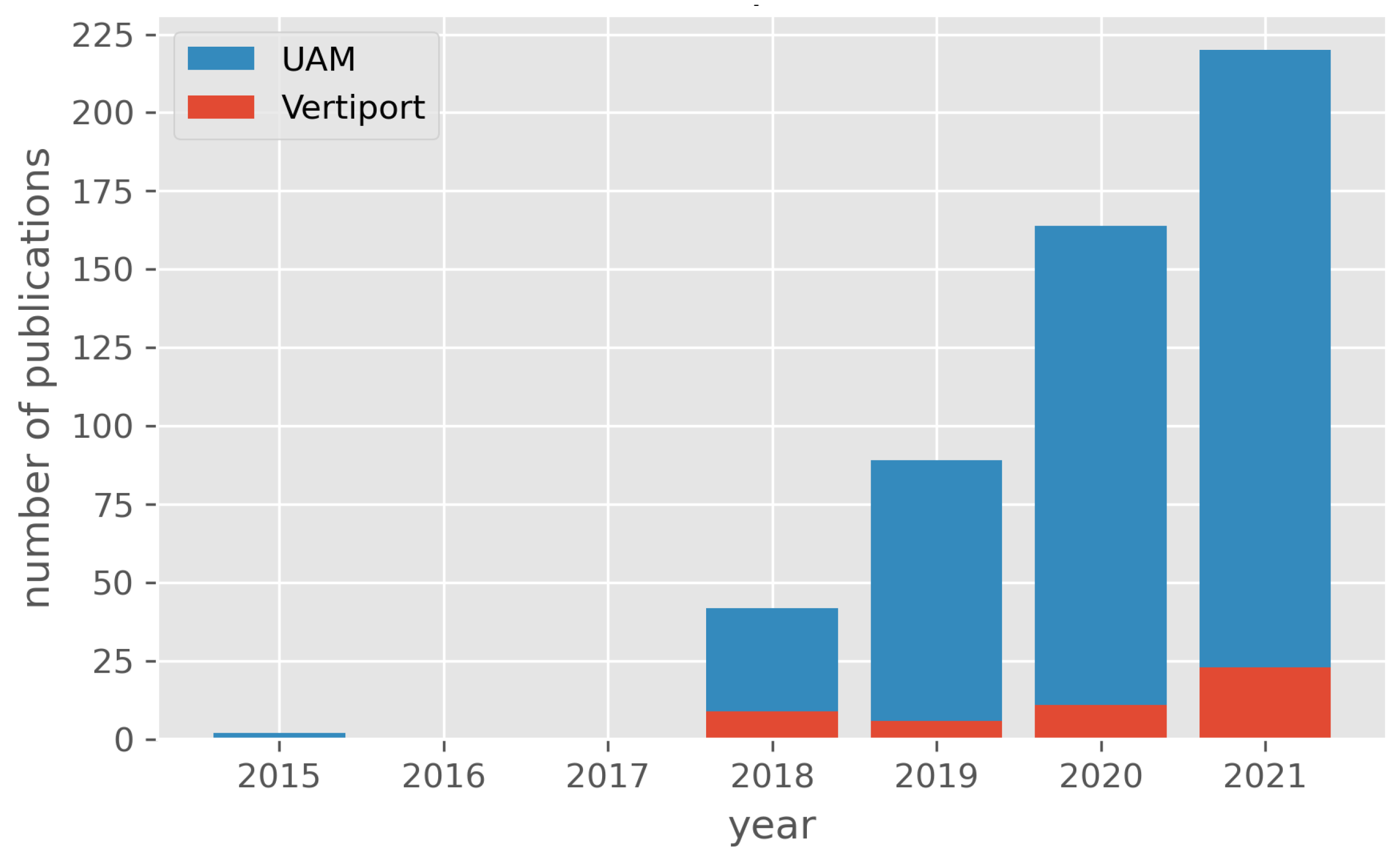
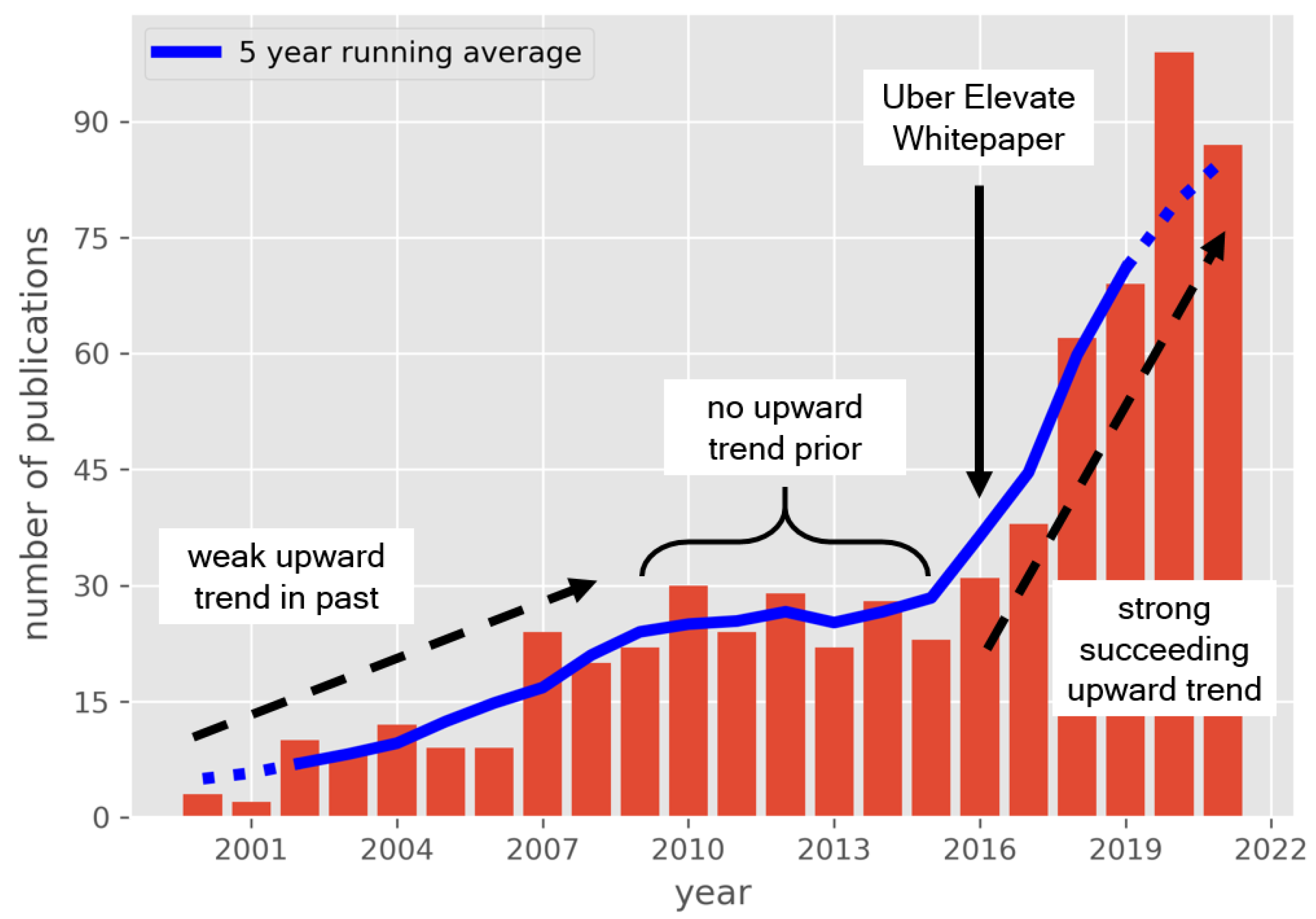
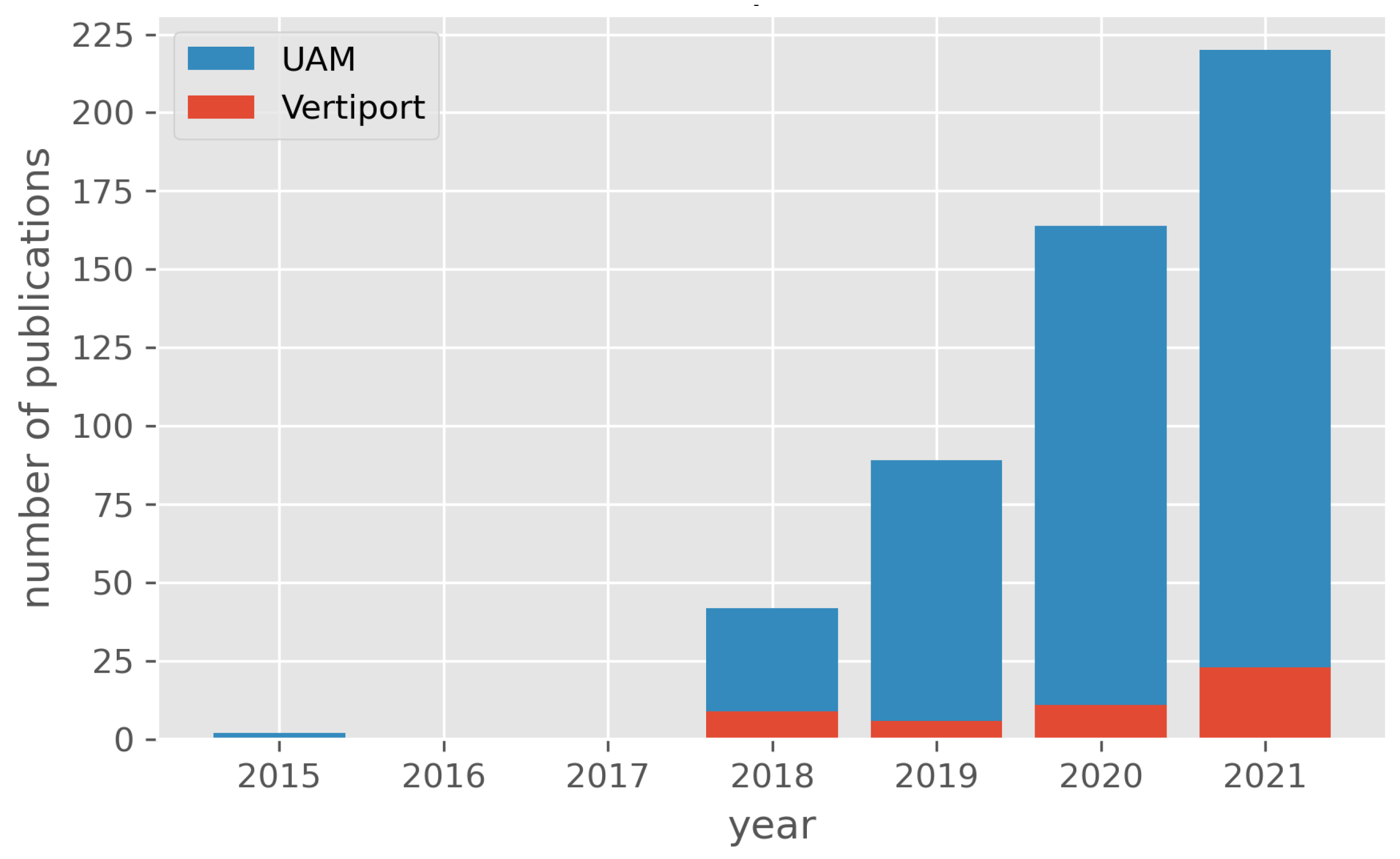
1.2. Trends in Research and Scientific Publication
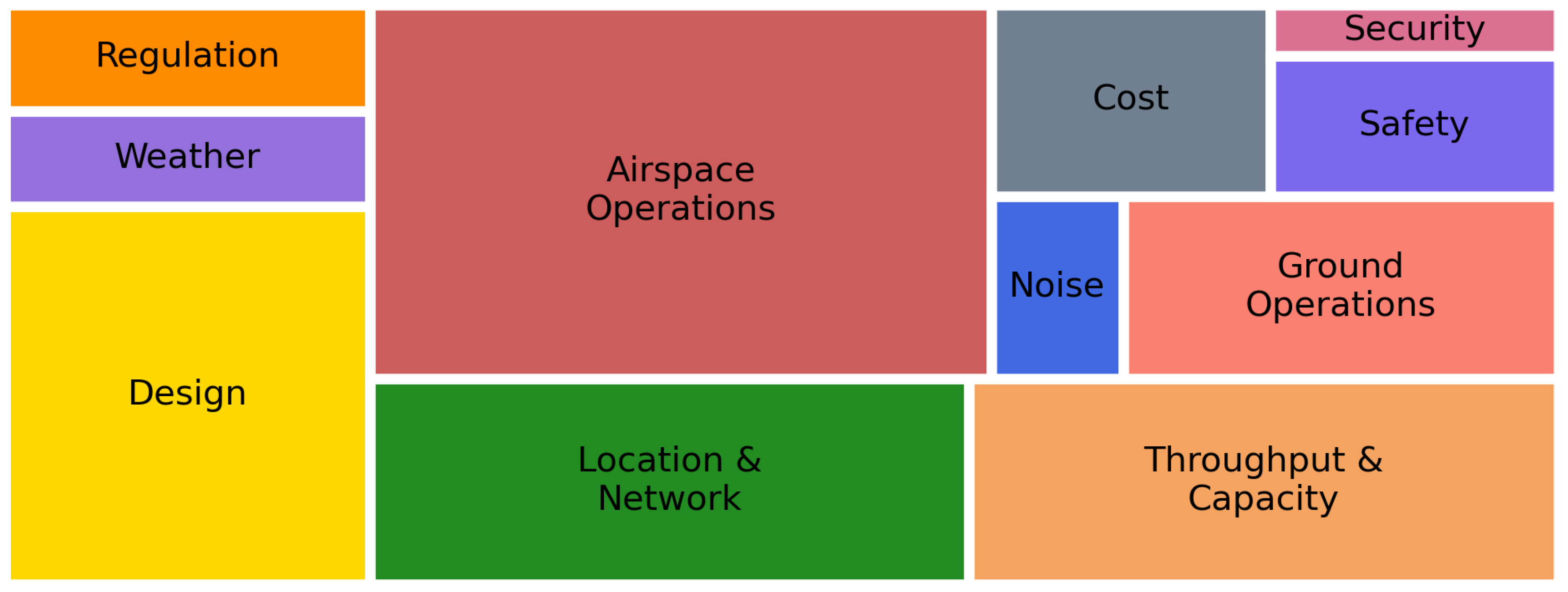
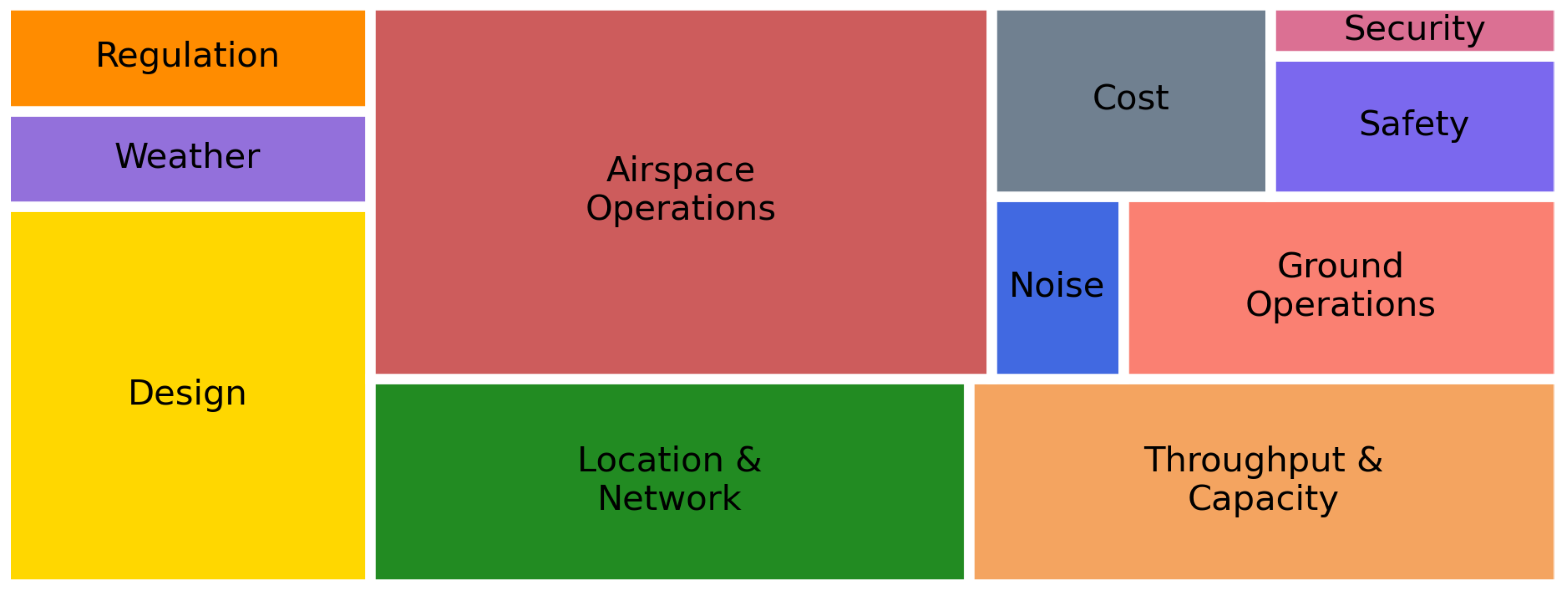
1.3. Classification of Vertiport-Related Topics
1.4. Summary
2. Heliport and Vertiport Design Guidelines
“Heliports provide the most analogous present-day model for VTOL vertiports. However, despite the similarities between the two types of aircraft, there are design differences between traditional helicopters and VTOL aircraft. VTOL aircraft come in varied configurations and propulsion systems, with and without wings, and with varied landing configurations.”[18]
2.1. Europe
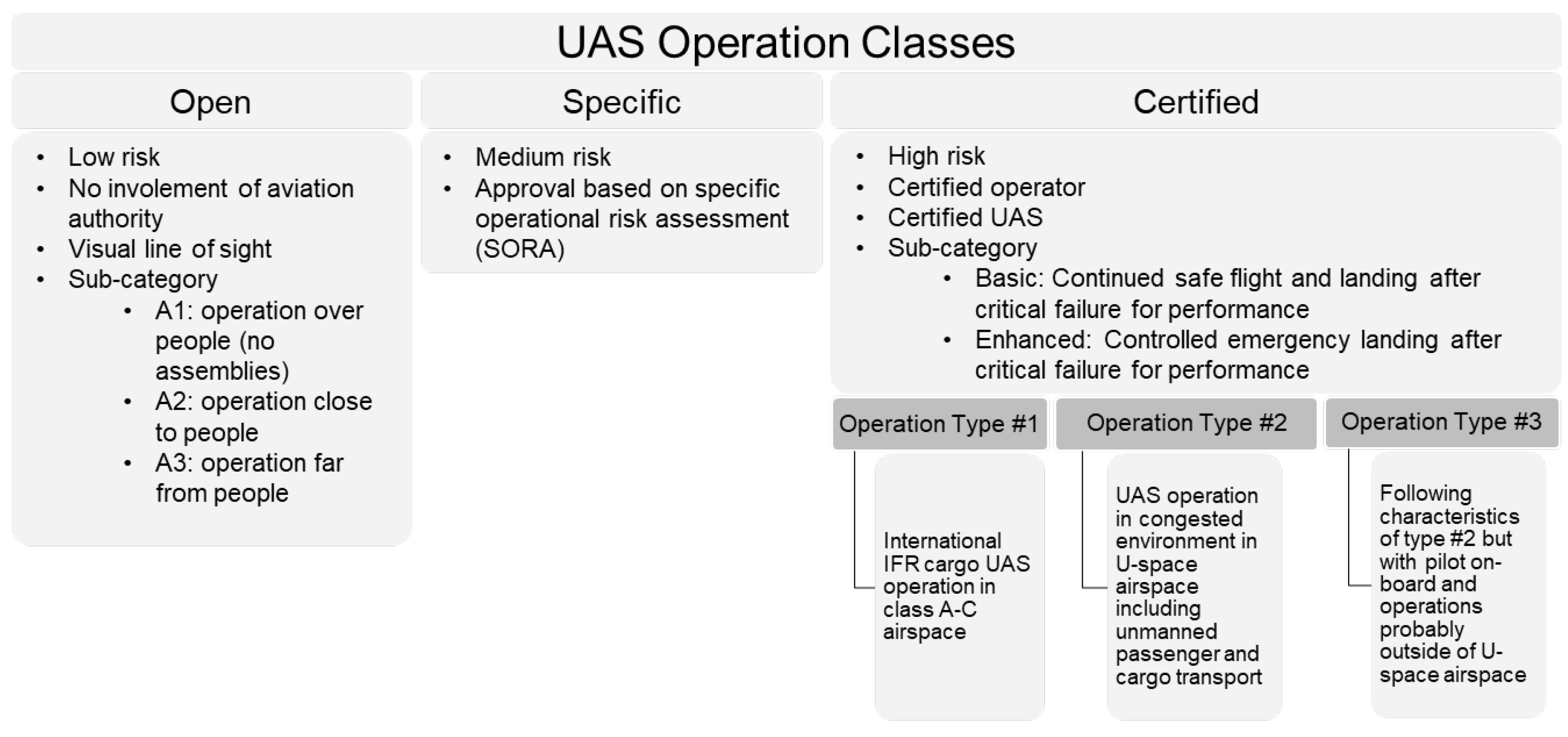
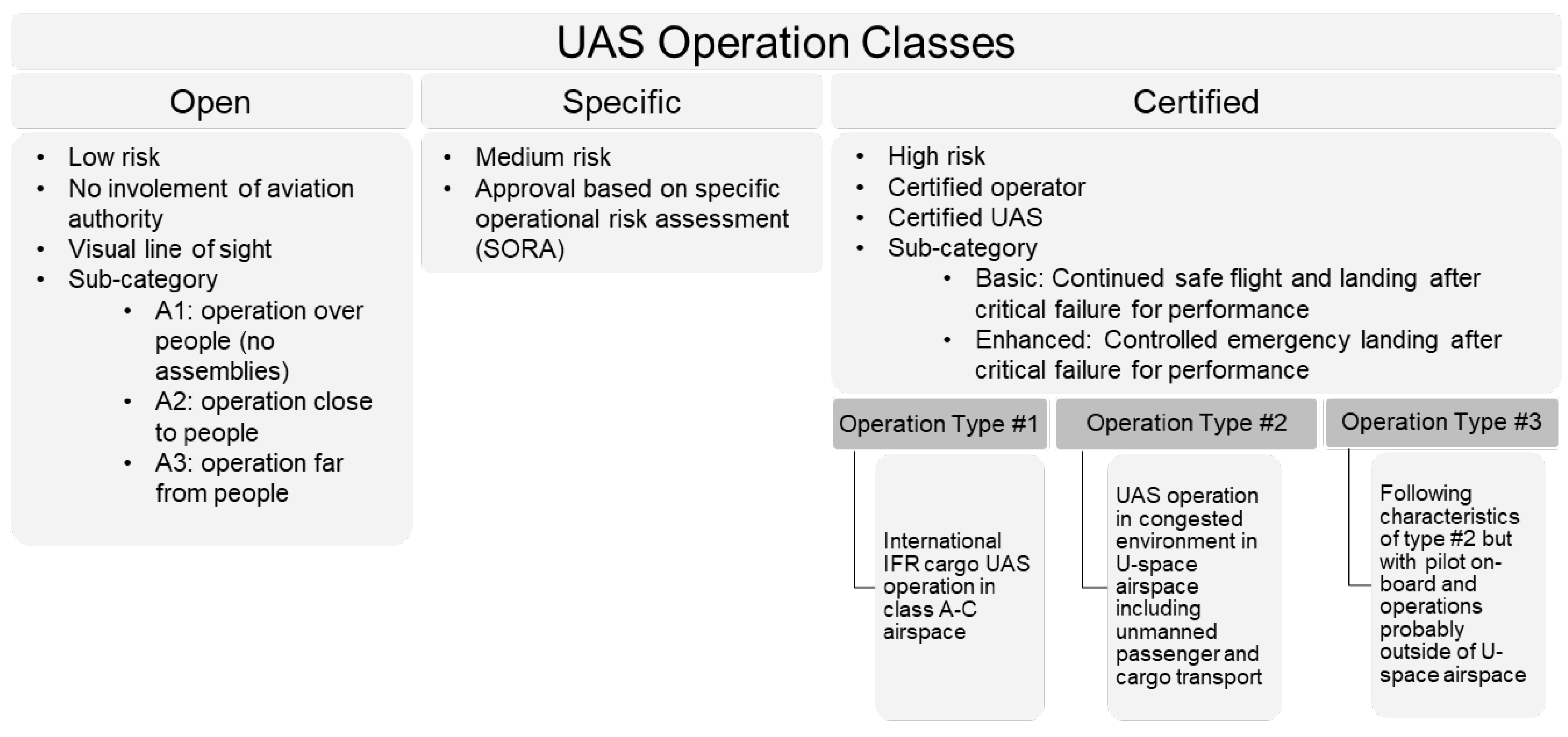
2.1.1. Operation Classes
2.1.2. D-Value
2.1.3. Vertiport Design Guidelines
2.1.4. Proposed Reference Volume for VTOL Procedures
2.1.5. Airspace Structure and Traffic Management
2.2. USA
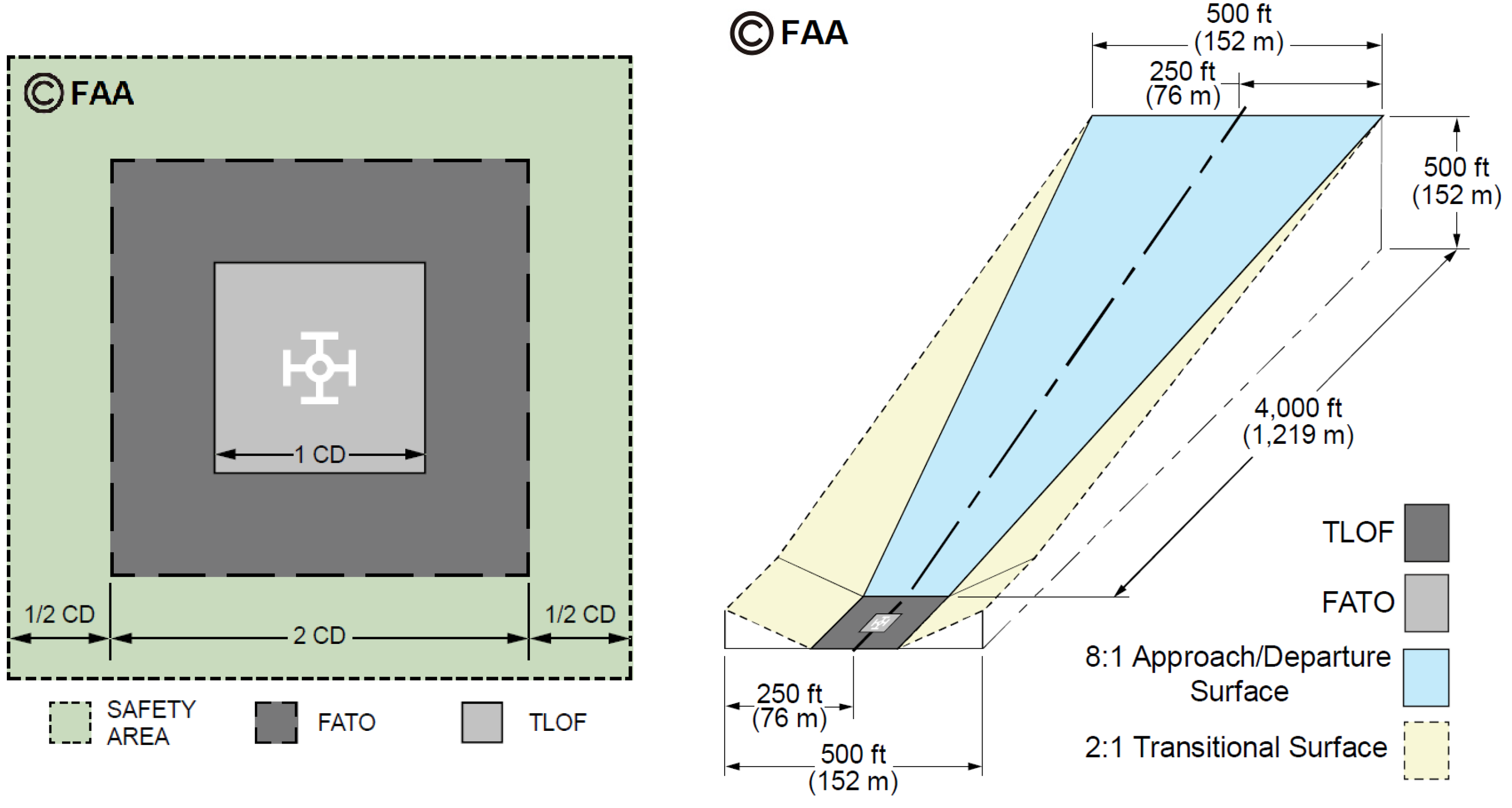
2.2.1. Heliport Design Guidelines
2.2.2. Historic and Future Regulatory Considerations for Vertiports
2.2.3. Air Traffic Management
2.3. International
2.4. Summary: Selective Comparison
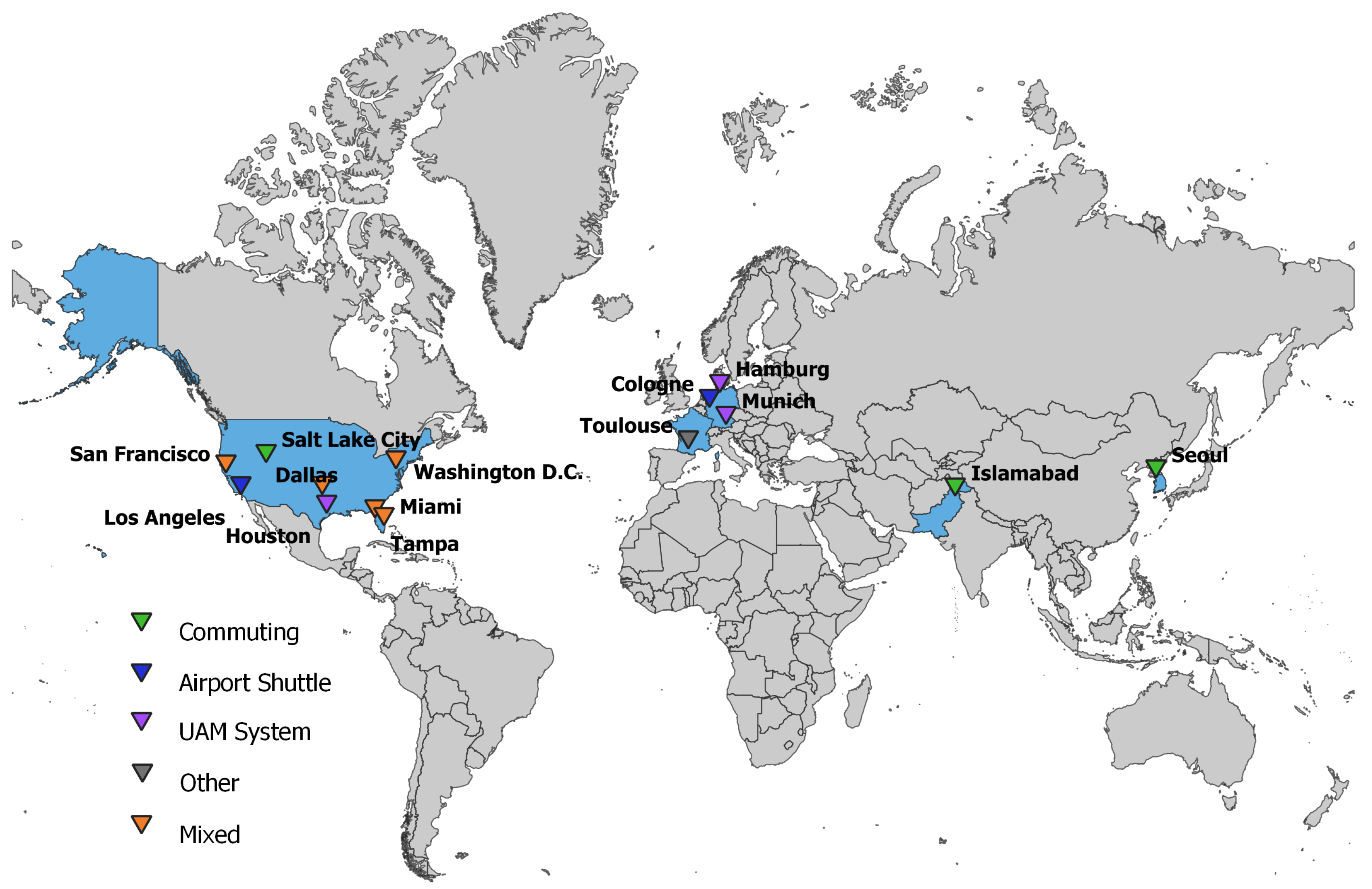
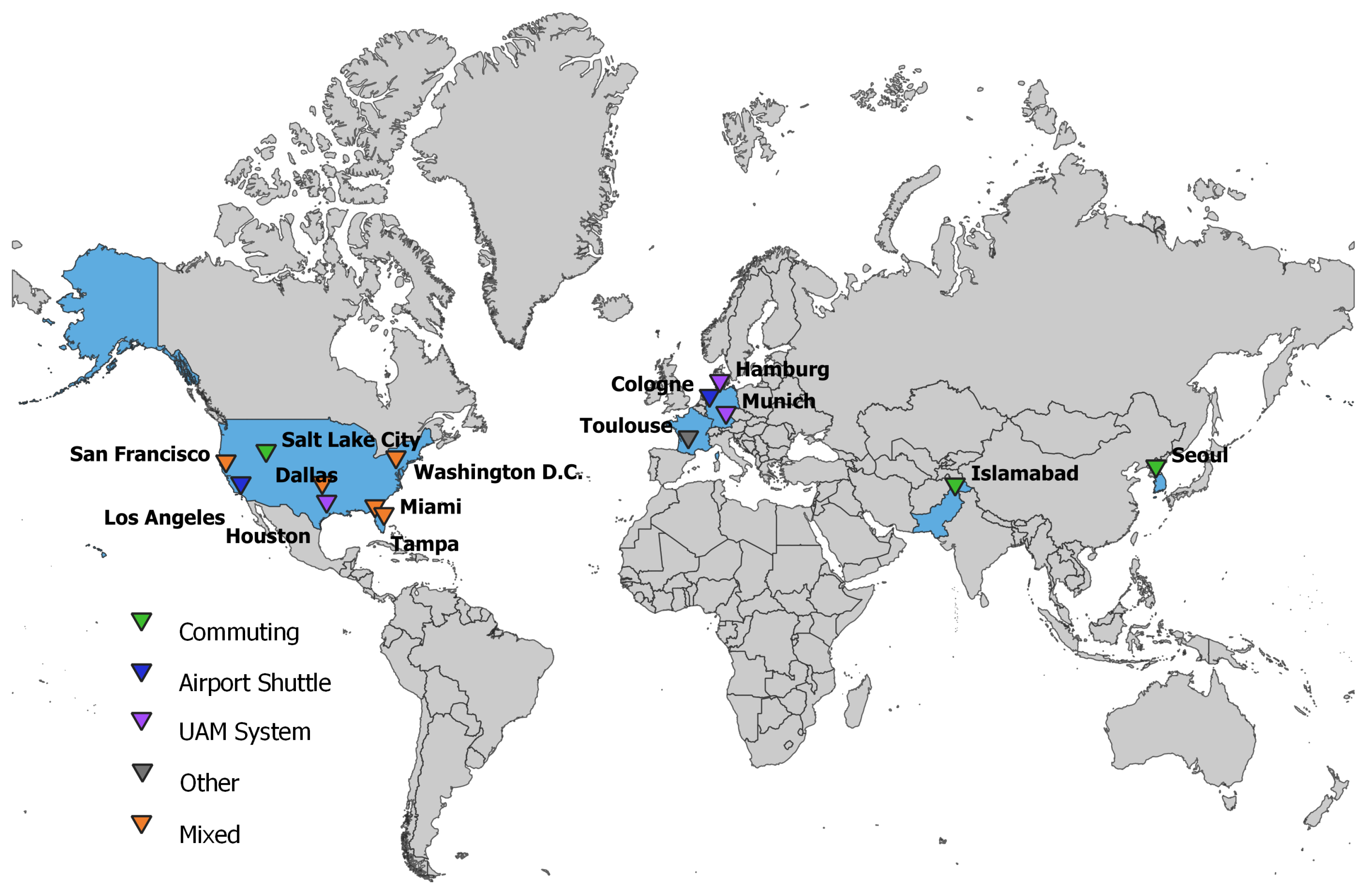
3. Vertiport Location and Networks
“Ground infrastructure and planning decisions at this stage of the project development carry significant project risk, and hence, decision makers and stakeholders need to be able to make well-considered business and operations decisions.”[81]
3.1. Vertiport Networks Based on Commuting Trends
3.2. Vertiport Network in Support of Airports
3.3. Holistic UAM Network Approaches
3.4. Other-Vertiport Networks Based on Parcel Delivery and STOL Operations
3.5. Summary
4. Vertiport Design and Operations
“We have a unique opportunity in aviation history to develop technical standards from scratch which will ensure that vertiports are safe and can be adapted to a succession of new VTOL aircraft types that we expect to be developed in the future.”[22]
4.1. Vertiport Design
4.1.1. Visions
4.1.2. Sizing Approaches and Tools
4.2. Airside Ground Considerations and Operations
4.2.1. Airfield Layout and Capacity
4.2.2. Ground Movement and Taxiing
4.2.3. Turnaround at Gate: Boarding and Charging
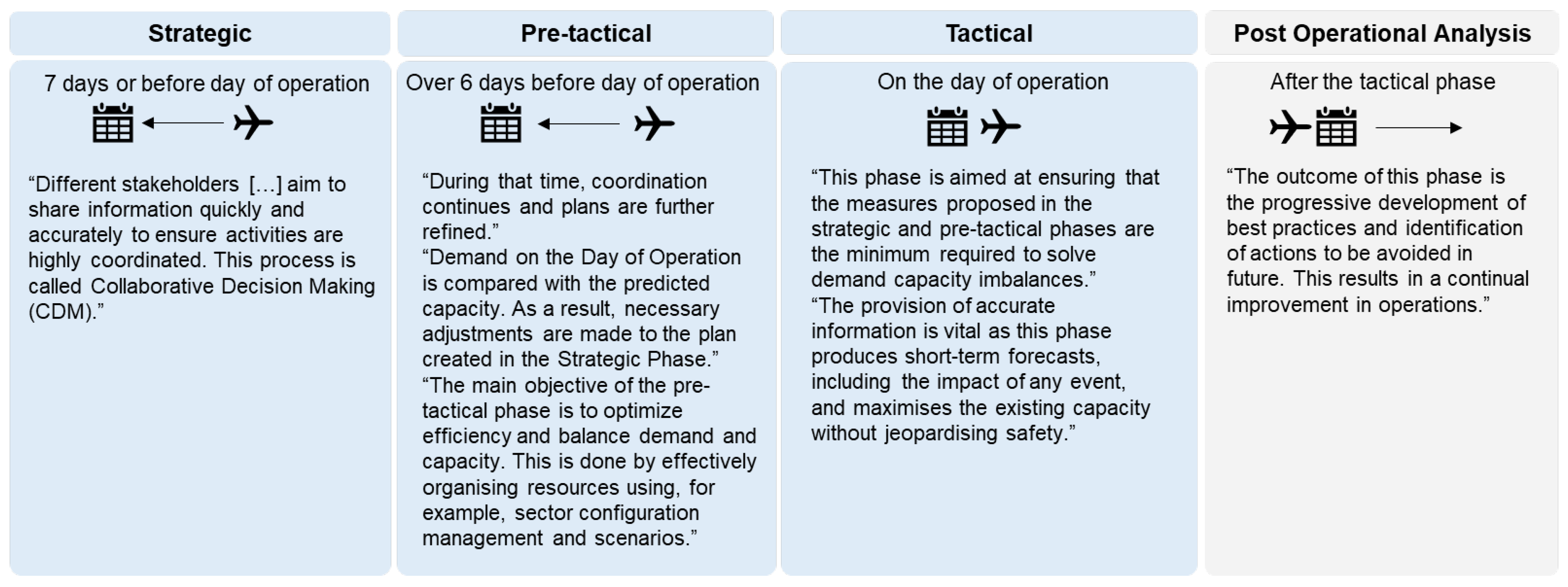
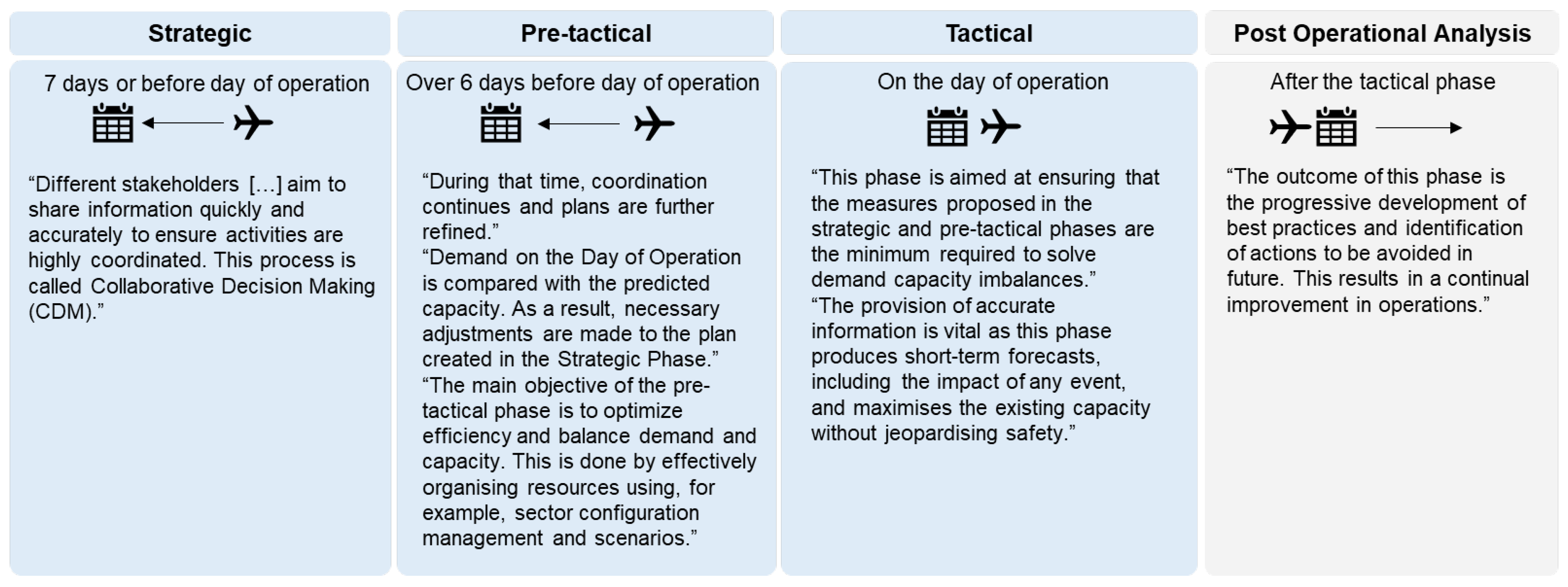
4.3. Airspace Considerations and Airside Air Operations
4.3.1. Strategic Measures
4.3.2. Tactical Measures
4.3.3. Measures in Airport Environment
4.4. Infrastructure Cost Estimation
4.5. Summary
5. Weather Impact on Vertiports
“Moreover, the weather enterprise needs champions in the aviation industry to embrace and promote weather as an integral component in the design, certification, and operation of aerial vehicles like eVTOLs or unmanned aerial systems (UAS)”[187]
5.1. Meteorological Conditions in Different Operating Environment
5.2. Meteorological Characteristics in Urban Environment
5.3. Weather Impact on Vertiport Elements and Procedures
5.4. Summary
6. Conclusions
“Say goodbye to congested streets, traffic diversions, and frustrating journeys”[196]
vs.
“Ground infrastructure experts wrestle with vertiport challenges”[197]
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | advisory circular |
| AGL | above ground level |
| API | application programming interface |
| ATC | air traffic control |
| ATM | air traffic management |
| CNS | communication, navigation and surveillance |
| ConOps | concept of operations |
| CFP | critical failure for performance |
| DOI | digital object identifier |
| EASA | European Union Aviation Safety Agency |
| eVTOL | electric vertical take-off and landing |
| EUROCAE | European Organization for Civil Aviation Equipment |
| FAA | U.S. Federal Aviation Administration |
| FATO | final approach and take-off area |
| FCFS | first come-first served |
| ICAO | International Civil Aviation Organization |
| IFR | instrument flight rules |
| LNG | liquefied natural gas |
| METAR | Meteorological Aerodrome Report |
| MRO | maintenance, repair and overhaul |
| NASA | National Aeronautical and Space Administration |
| PAV | personal aerial vehicle |
| PinS | point-in-space |
| SC | special condition |
| STOL | short take-off and landing |
| TLOF | touchdown and lift-off area |
| UAM | urban air mobility |
| UAS | unmanned aerial system |
| UTM | unmanned aircraft system traffic management |
| VFR | visual flight rules |
| VTOL | vertical take-off and landing |
Appendix A
- IEEE Transactions on Intelligent Transportation Systems
- International Journal of Aeronautical and Space Sciences
- MDPI Sustainability
- IEEE Metrology for Aerospace
- MDPI Applied Sciences
- Elsevier Engineering
- International Conference on Engineering Design
- Aerospace Science and Technology
- Transportation Research Record
- IEEE Transactions on Control of Network Systems
- MDPI Aerospace
- IEEE Chinese Guidance, Navigation and Control Conference

| DOI | Year | Authors | Title | Citations in Scopus |
|---|---|---|---|---|
| 10.1109/DASC.2018. 8569645 | 2018 | I. C. Kleinbekman, M. A. Mitici, P. Wei | Evtol Arrival Sequencing And Scheduling For On-Demand Urban Air Mobility | 30 |
| 10.2514/6.2018-3677 | 2018 | L. W. Kohlman, M. D. Patterson | System-Level Urban Air Mobility Transportation Modeling And Determination Of Energy-Related Constraints | 27 |
| 10.2514/6.2019-0526 | 2019 | P. D. Vascik, R. J. Hansman | Development Of Vertiport Capacity Envelopes And Analysis Of Their Sensitivity To Topological And Operational Factors | 25 |
| 10.2514/6.2018-2008 | 2018 | P. Pradeep, P. Wei | Energy Efficient Arrival With Rta Constraint For Urban Evtol Operations | 20 |
| 10.2514/6.2018-2006 | 2018 | B. J. German, M. J. Daskilewicz, T. K. Hamilton, M. M. Warren | Cargo Delivery By Passenger Evtol Aircraft: A Case Study In The San Francisco Bay Area | 19 |
| 10.1007/s13272-020-00468-5 | 2020 | K. O. Ploetner, C. Al, C. Antoniou, F. Frank, M. Fu, S. Kabel, C. Llorca, R. Moeckel, A. T. Moreno, A. Pukhova, R. Rothfeld, M. Shamiyeh, A. Straubinger, H. Wagner, Q. Zhang | Long-Term Application Potential Of Urban Air Mobility Complementing Public Transport: An Upper Bavaria Example | 15 |
| 10.2514/6.2018-3054 | 2018 | J. N. Robinson, M. D. Sokollek, C. Y. Justin, D. N. Mavris | Development Of A Methodology For Parametric Analysis Of Stol Airpark Geo-Density | 12 |
| 10.1109/GNCC42960. 2018.9018748 | 2018 | P. Pradeep, P. Wei | Energy Optimal Speed Profile For Arrival Of Tandem Tilt-Wing Evtol Aircraft With Rta Constraint | 12 |
| 10.2514/1.I010710 | 2019 | P. Pradeep, P. Wei | Energy-Efficient Arrival With Rta Constraint For Multirotor Evtol In Urban Air Mobility | 12 |
| 10.2514/6.2021-1189 | 2021 | R. C. Busan, P. C. Murphy, D. B. Hatke, B. M. Simmons | Wind Tunnel Testing Techniques For A Tandem Tilt-Wing, Distributed Electric Propulsion Vtol Aircraft | 9 |
References
- Johnston, T.; Riedel, R.; Sahdev, S. To Take Off, Flying Vehicles First Need Places to Land. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/to-take-off-flying-vehicles-first-need-places-to-land# (accessed on 18 November 2020).
- European Union Aviation Safety Agency (EASA). Study on Societal Acceptance of Urban Air Mobility in Europe; Technical Report; EASA: Cologne, Germany, 2021.
- Anandarajan, M.; Hill, C.; Nolan, T. Practical Text Analytics: Maximizing the Value of Text Data; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Garrow, L.A.; German, B.J.; Leonard, C.E. Urban air mobility: A comprehensive review and comparative analysis with autonomous and electric ground transportation for informing future research. Transp. Res. Part C Emerg. Technol. 2021, 132, 103377. [Google Scholar] [CrossRef]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An overview of current research and developments in urban air mobility—Setting the scene for UAM introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Hill, B.P.; DeCarme, D.; Metcalfe, M.; Griffin, C.; Wiggins, S.; Metts, C.; Bastedo, B.; Patterson, M.D.; Mendonca, N.L. UAM Vision Concept of Operations (ConOps) UAM Maturity Level (UML) 4-Version 1.0. Available online: https://ntrs.nasa.gov/api/citations/20205011091/downloads/UAM%20Vision%20Concept%20of%20Operations%20UML-4%20v1.0.pdf (accessed on 28 March 2021).
- Schweiger, K.; Knabe, F.; Korn, B. An exemplary definition of a vertidrome’s airside concept of operations. Aerosp. Sci. Technol. 2022, 125, 107144. [Google Scholar] [CrossRef]
- Federal Aviation Administration (FAA). Helicopter Instructor’s Handbook (FAA-H-8083-4). Available online: https://www.faa.gov/regulations_policies/handbooks_manuals/aviation/media/FAA-H-8083-4.pdf (accessed on 2 February 2021).
- International Civil Aviation Organization (ICAO). Annex 14-Aerodromes-Volume I-Aerodrome Design and Operations. In International Standards and Recommended Practices, 4th ed.; ICAO: Montreal, QC, Canada, 2004; Volume I. [Google Scholar]
- European Union Aviation Safety Agency (EASA). Certification Specification and Guidance Material for Aerodromes Design Issue 4. Available online: https://www.easa.europa.eu/sites/default/files/dfu/Annex%20to%20EDD%202017-021-R%20-%20CS-ADR-DSN%20Issue%204_0.pdf (accessed on 24 November 2020).
- European Union Aviation Safety Agency (EASA). Aerodromes & Ground Handling. Available online: https://www.easa.europa.eu/light/topics/aerodromes-ground-handling (accessed on 24 November 2020).
- European Union Aviation Safety Agency (EASA). Certification Specifications and Guidance Material for the Design of Surface-Level VFR Heliports Located at Aerodromes that Fall under the Scope of Regulation (EU) 2018/1139 (CS-HPT-DSN) Issue 1. Available online: https://www.easa.europa.eu/sites/default/files/dfu/Annex%20to%20ED%20Decision%202019-012-R%20CS-HPT-DSN.pdf (accessed on 7 May 2020).
- Clay, B.; Baumgaertner, P.; Thompson, P.; Meyer, S.; Reber, R.; Berry, D. Civil Tiltrotor Missions and Applications: A Research Study. Contractor Report NASA-CR-177452, 1987. Available online: https://ntrs.nasa.gov/api/citations/19910004111/downloads/19910004111.pdf (accessed on 11 July 2022).
- Thompson, P.; Neir, R.; Reber, R.; Scholes, R.; Alexander, H.; Sweet, D.; Berry, D. Civil Tiltrotor Missions and Applications Phase II: The Commercial Passenger Market. Contractor Report NASA-CR-177576, 1991. Available online: https://ntrs.nasa.gov/api/citations/19910016812/downloads/19910016812.pdf (accessed on 11 July 2022).
- Civil Tiltrotor Development Advisory Committee (CTRDAC). Civil Tiltrotor Development Advisory Committee-Report to Congress; Defense Technical Information Center: Fort Belvoir, VA, USA, 1995; Volume 1.
- FAA RE&D Committee Vertical Flight Subcommittee. Tiltrotor and Advanced Rotorcraft Technology in the National Airspace System (TARTNAS); Technical Report; Federal Aviation Administration: Washington, DC, USA, 2001.
- Federal Aviation Administration (FAA). Advisory Circular 150/5390-3—Vertiport Design (Cancelled). Available online: https://www.faa.gov/documentLibrary/media/advisory_circular/150-5390-3/150_5390_3.PDF (accessed on 5 May 2020).
- Federal Aviation Administration (FAA). Memorandum subject to Engineering Brief No. 105, Vertiport Design. Available online: https://www.faa.gov/airports/engineering/engineering_briefs/drafts/media/eb-105-vertiport-design-industry-draft.pdf (accessed on 8 March 2022).
- Federal Aviation Administration (FAA). Urban Air Mobility (UAM) Concept of Operations v1.0. Available online: https://nari.arc.nasa.gov/sites/default/files/attachments/UAM_ConOps_v1.0.pdf (accessed on 6 August 2020).
- Northeast UAS Airspace Integration Research Alliance (NUAIR). High-Density Automated Vertiport Concept of Operations. Contractor or Grantee Report 20210016168. 2021. Available online: https://ntrs.nasa.gov/api/citations/20210016168/downloads/20210016168_MJohnson_VertiportAtmtnConOpsRprt_final_corrected.pdf (accessed on 11 July 2022).
- European Union Aviation Safety Agency (EASA). Special Condition Vertical Take-Off and Landing (VTOL) Aircraft. Available online: https://www.easa.europa.eu/sites/default/files/dfu/SC-VTOL-01.pdf (accessed on 20 September 2021).
- European Union Aviation Safety Agency (EASA). Vertiports Prototype Technical Specifications for the Design of VFR Vertiports for Operation with Manned VTOL-Capable Aircraft Certified in the Enhanced Category (PTS-VPT-DSN). Available online: https://www.easa.europa.eu/downloads/136259/en (accessed on 27 March 2022).
- EUROCAE. EUROCAE Open Consultation ED-299. Available online: https://www.eurocae.net/news/posts/2021/december/eurocae-open-consultation-ed-299/ (accessed on 23 February 2022).
- EUROCAE. ED-293 Concept of Operations for VTOL Aircraft Volume 2: Commercial Passenger Air Taxi Transport; EUROCAE: Saint-Denis, France, 2021. [Google Scholar]
- International Organization for Standardization (ISO). ISO/AWI 5491 Vertiports—Infrastructure and Equipment for Vertical Take-Off and Landing (VTOL) of Electrically Powered Cargo Unmanned Aircraft System (UAS). Available online: https://www.iso.org/standard/81313.html (accessed on 20 September 2021).
- ASTM International. ASTM WK59317 New Specification for Vertiport Design. Available online: https://www.astm.org/workitem-wk59317 (accessed on 8 June 2022).
- Uber Elevate. Fast-Forwarding to a Future of On-Demand Urban Air Transportation. Available online: https://evtol.news/__media/PDFs/UberElevateWhitePaperOct2016.pdf (accessed on 20 September 2021).
- Volocopter GmbH. The Roadmap to Scalable Urban Air Mobility White Paper 2.0. Available online: https://www.volocopter.com/content/uploads/Volocopter-WhitePaper-2-0.pdf (accessed on 13 March 2022).
- Airbus; Boeing. A New Digital Era of Aviation: The Path Forward for Airspace and Traffic Management. Available online: https://storage.googleapis.com/blueprint/Airbus%20Boeing%20New%20era%20of%20digital%20aviation.pdf (accessed on 11 July 2022).
- Skyports; Wisk. Concept of Operations: Autonomous UAM Aircraft Operations and Vertiport Integration; Skyports: London, UK; Wisk: Mountain View, CA, USA, 2022; Available online: https://wisk.aero/wp-content/uploads/2022/04/2022-04-12-Wisk-Skyports-ConOps-Autonomous-eVTOL-Operations-FINAL.pdf (accessed on 11 July 2022).
- Lineberger, R.; Hussain, A.; Metcalfe, M.; Rutgers, V. Infrastructure Barriers to the Elevated Future of Mobility. Available online: https://www2.deloitte.com/content/dam/insights/us/articles/5103_Infrastructure-barriers-to-elevated-FOM/DI_Infrastructure-barriers-to-elevated-FOM.pdf (accessed on 9 June 2022).
- Vascik, P.D. Systems Analysis of Urban Air Mobility Operational Scaling. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2019. [Google Scholar]
- Salehi, V.; Wang, S. Application of Munich Agile Concepts for Mbse as a Holistic and Systematic Design of Urban Air Mobility in Case of Design of Vertiports and Vertistops. Proc. Des. Soc. 2021, 1, 497–510. [Google Scholar] [CrossRef]
- Skyports Limited. Landing Infrastructure. Available online: https://skyports.net/landing-infrastructure/ (accessed on 7 March 2022).
- Wei, L.; Justin, C.Y.; Mavris, D.N. Optimal Placement of Airparks for STOL Urban and Suburban Air Mobility. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Plested, H. Vertiport Regulations and Standards: Creating the Rules Framework for UAM Infrastructure. Available online: https://skyports.net/2020/07/vertiport-regulations-and-standards-creating-the-rules-framework-for-uam-infrastructure/ (accessed on 7 February 2021).
- European Union Aviation Safety Agency (EASA). Proposed Means of Compliance with the Special Condition VTOL. Available online: https://www.easa.europa.eu/document-library/product-certification-consultations/special-condition-vtol (accessed on 22 October 2020).
- European Union Aviation Safety Agency (EASA). Second Publication of Proposed Means of Compliance with the Special Condition VTOL. Available online: https://www.easa.europa.eu/downloads/128938/en (accessed on 8 December 2021).
- Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on Unmanned Aircraft Systems and on Third-Country Operators of Unmanned Aircraft Systems (OJ L 152, 11.6.2019, p. 1). Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:02019R0945-20200809&from=EN (accessed on 23 February 2022).
- Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft (OJ L 152, 11.6.2019, p. 45). Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:02019R0947-20210805&from=EN (accessed on 23 February 2022).
- European Union Aviation Safety Agency (EASA). Certified Category-Civil Drones. Available online: https://www.easa.europa.eu/domains/civil-drones/drones-regulatory-framework-background/certified-category-civil-drones (accessed on 11 March 2022).
- European Aviation Safety Agency (EASA). Terms of Reference for Rulemaking Task RMT.0230 Introduction of a Regulatory Framework for the Operation of Unmanned Aircraft Systems and for Urban Air Mobility in the European Union Aviation System, Issue 3. Available online: https://www.easa.europa.eu/downloads/126656/en (accessed on 22 February 2022).
- Alamouri, A.; Lampert, A.; Gerke, M. An Exploratory Investigation of UAS Regulations in Europe and the Impact on Effective Use and Economic Potential. Drones 2021, 5, 63. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency (EASA). Open Category-Civil Drones. Available online: https://www.easa.europa.eu/domains/civil-drones/drones-regulatory-framework-background/open-category-civil-drones (accessed on 24 May 2022).
- The Vertical Flight Society. eVTOL Aircraft Directory. Available online: https://evtol.news/aircraft (accessed on 30 May 2022).
- European Union Aviation Safety Agency (EASA). VTOL Trajectories and Vertiports-Rotorcraft & VTOL Symposium 2021. Available online: https://www.youtube.com/watch?v=e_fsxgWIENI (accessed on 21 February 2022).
- European Union Aviation Safety Agency (EASA). Annexes to the draft Commission Regulation on ‘Air Operations-OPS’. Available online: https://www.easa.europa.eu/sites/default/files/dfu/Annexes%20to%20Regulation.pdf (accessed on 9 December 2021).
- CORUS. U-Space Concept of Operations. Available online: https://ext.eurocontrol.int/ftp/?t=714bd3ca21914c619387f1811a6b2f24 (accessed on 22 October 2020).
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- Commission Implementing Regulation (EU) 2021/664 of 22.4.2021 on a Regulatory Framework for the U-Space (OJ L 139, 23.4.2021, pp. 161–183). Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32021R0664&from=EN (accessed on 23 February 2022).
- European Union Aviation Safety Agency (EASA). Notice of Proposed Amendment 2021-14 in accordance with Articles 6(3), 7 and 8 (‘Standard Procedure’: Public Consultation) of MB Decision No 18-2015 Development of Acceptable Means of Compliance and Guidance Material to Support the U-Space Regulation. Available online: https://www.easa.europa.eu/downloads/134303/en (accessed on 24 February 2022).
- European Commission. Concept Of Operations For European U-Space Services—Extension For Urban Air Mobility. Available online: https://cordis.europa.eu/project/id/101017682 (accessed on 27 May 2022).
- European Commission. Tactical Instrumental Deconfliction and in flight Resolution. Available online: https://cordis.europa.eu/project/id/101017677 (accessed on 27 May 2022).
- European Commission. Demand and Capacity Optimisation in U-Space. Available online: https://cordis.europa.eu/project/id/893864 (accessed on 27 May 2022).
- European Commission. PJ34-W3 AURA “ATM U-SPACE INTERFACE”. Available online: https://cordis.europa.eu/project/id/101017521/de (accessed on 27 May 2022).
- Central Intelligence Agency. The World Factbook: Heliports. Available online: https://www.cia.gov/the-world-factbook/field/heliports/ (accessed on 7 April 2021).
- Federal Aviation Administration (FAA). 150/5390-2C-Heliport Design. Available online: https://www.faa.gov/airports/resources/advisory_circulars/index.cfm/go/document.current/documentnumber/150_5390-2 (accessed on 13 June 2022).
- Federal Aviation Administration (FAA). Draft 150/5390-2D-Heliport Design. Available online: https://www.faa.gov/regulations_policies/advisory_circulars/index.cfm/go/document.information/documentID/1038739 (accessed on 13 June 2022).
- National Air Transportation Association (NATA). Urban Air Mobility: Considerations for Vertiport Operation. Available online: https://www.nata.aero/assets/Site_18/files/GIA/NATA%20UAM%20White%20Paper%20-%20FINAL%20cb.pdf (accessed on 13 June 2022).
- Zoldi, D.M.K. Vertiport Infrastructure: New Tech, Old Regulations. Available online: https://insideunmannedsystems.com/vertiport-infrastructure-new-tech-old-regulations/ (accessed on 24 February 2022).
- HeliOffshore. Approach Path Management Guidelines. Available online: www.helioffshore.org (accessed on 8 July 2021).
- Goodrich, K.H.; Theodore, C.R. Description of the NASA Urban Air Mobility Maturity Level (UML) Scale. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VA, USA, 11–21 January 2021. [Google Scholar] [CrossRef]
- Massachusetts Institute of Technology (MIT). Concepts Studies for Future Intracity Air Transportation Systems. Available online: https://dspace.mit.edu/handle/1721.1/68000 (accessed on 13 June 2022).
- Peisen, D.J.; Ferguson, S.W. Vertiport Design Characteristics for Advanced Rotorcraft Technology. SAE Trans. 1996, 105, 1313–1319. [Google Scholar]
- Peisen, D.J. Analysis of Vertiport Studies Funded by the Airport Improvement Program (AIP). Available online: https://apps.dtic.mil/sti/pdfs/ADA283249.pdf (accessed on 13 June 2022).
- Giligan, M.; Grizzle, J.D.; Cox, V.H. Integration of Unmanned Aircraft Systems into the National Airspace System: Concept of Operations v2.0. Available online: https://www.suasnews.com/wp-content/uploads/2012/10/FAA-UAS-Conops-Version-2-0-1.pdf (accessed on 13 June 2022).
- Kopardekar, P.H. Unmanned Aerial System (UAS) Traffic Management (UTM): Enabling Low-Altitude Airspace and UAS Operations. Available online: https://ntrs.nasa.gov/api/citations/20140013436/downloads/20140013436.pdf (accessed on 13 June 2022).
- Kopardekar, P.H.; Rios, J.; Prevot, T.; Johnson, M.A.; Jung, J.; Robinson III, J.E. UAS Traffic Management (UTM) Concept of Operations to Safely Enable Low Altitude Flight Operations. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 201. [Google Scholar] [CrossRef]
- Kopardekar, P.H.; Bradford, S. UAS Traffic Management (UTM): Research Transition Team (RTT) Plan. Available online: https://www.faa.gov/uas/research_development/traffic_management/media/FAA_NASA_UAS_Traffic_Management_Research_Plan.pdf (accessed on 13 June 2022).
- Federal Aviation Administration (FAA). Low Altitude Authorization and Notification Capability (LAANC) Concept of Operations. Available online: https://www.faa.gov/uas/programs_partnerships/data_exchange/laanc_for_industry/media/laanc_concept_of_operations.pdf (accessed on 13 June 2022).
- Chan, W.N.; Barmore, B.; Kibler, J.; Lee, P.U.; O’Connor, N.; Palopo, K.; Thipphavong, D.P.; Zelinski, S. Overview of NASA’s ATM-X Project. In Proceedings of the 18th AIAA Aviation Technology, Integration, and Operations Conference 2018, Atlanta, GA, USA, 25–29 June 2018; Curran Associates Inc.: Red Hook, NY, USA, 2018. [Google Scholar] [CrossRef]
- Federal Aviation Administration (FAA); U.S. Department of Transportation (DoT). Unmanned Aircraft System (UAS) Traffic Management (UTM): Concept of Operations v1.0. Available online: https://www.faa.gov/uas/research_development/traffic_management/media/UTM_ConOps_v2.pdf (accessed on 13 June 2022).
- International Civil Aviation Organization (ICAO). Heliport Manual (Doc 9261), 5th ed. Available online: https://store.icao.int/en/heliport-manual-doc-9261 (accessed on 13 June 2022).
- Balakrishnan, K.; Polastre, J.; Mooberry, J.; Golding, R.; Sachs, P. Blueprint For The Sky: The Roadmap for the Safe Integration of Autonomous Aircraft. Available online: https://www.airbusutm.com/uam-resources-airbus-blueprint (accessed on 13 June 2022).
- Zhang, J. UOMS in China. Available online: www.eu-china-app.org (accessed on 13 June 2022).
- Civil Aviation Administration of China (CAAC). Map of UTM Implementation: China. Available online: http://gutma.org/maps/index.php?title=China (accessed on 13 June 2022).
- Ushijima, H. UTM Project in Japan. Available online: https://gutma.org/montreal-2017/wp-content/uploads/sites/2/2017/07/UTM-Project-in-Japan_METI.pdf (accessed on 13 June 2022).
- Japan Aerospace Exploration Agency (JAXA). Development of UAS Traffic Management System (UTM) in Progress. Available online: https://global.jaxa.jp/activity/pr/jaxas/no079/08.html (accessed on 13 June 2022).
- Airservices Australia; Embraer Business Innovation Center. Urban Air Traffic Management Concept of Operations Version 1. Available online: https://daflwcl3bnxyt.cloudfront.net/m/3dc1907d3388ff52/original/PPJ016561-UATM-Concept-of-Operations-Design_D11-FINAL.pdf (accessed on 24 February 2022).
- International Transport Forum (ITF); Organisation for Economic Co-Operation and Development (OECD). Ready for Take-Off? Integrating Drones into the Transport System. Available online: https://www.itf-oecd.org/integrating-drones-transport-system (accessed on 13 June 2022).
- Venkatesh, N.; Payan, A.P.; Justin, C.Y.; Kee, E.; Mavris, D. Optimal Siting of Sub-Urban Air Mobility (sUAM) Ground Architectures using Network Flow Formulation. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual Event, 15–19 June 2020. [Google Scholar] [CrossRef]
- Robinson, J.N.; Sokollek, M.D.R.; Justin, C.Y.; Mavris, D.N. Development of a Methodology for Parametric Analysis of STOL Airpark Geo-Density. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Bulusu, V.; Onat, E.B.; Sengupta, R.; Yedavalli, P.; Macfarlane, J. A Traffic Demand Analysis Method for Urban Air Mobility. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6039–6047. [Google Scholar] [CrossRef]
- Willey, L.C.; Salmon, J.L. A method for urban air mobility network design using hub location and subgraph isomorphism. Transp. Res. Part C Emerg. Technol. 2021, 125, 102997. [Google Scholar] [CrossRef]
- Gillani, R.; Jahan, S.; Majid, I. A Proposed Communication, Navigation & Surveillance System Architecture to Support Urban Air Traffic Management. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Jeong, J.; So, M.; Hwang, H.Y. Selection of Vertiports Using K-Means Algorithm and Noise Analyses for Urban Air Mobility (UAM) in the Seoul Metropolitan Area. Appl. Sci. 2021, 11, 5729. [Google Scholar] [CrossRef]
- Chan, C.; Wang, B.; Bachan, J.; Macfarlane, J. Mobiliti: Scalable Transportation Simulation Using High-Performance Parallel Computing. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 634–641. [Google Scholar] [CrossRef]
- Alvarez, L.E.; Jones, J.C.; Bryan, A.; Weinert, A.J. Demand and Capacity Modeling for Advanced Air Mobility. In Proceedings of the AIAA AVIATION 2021 FORUM, American Institute of Aeronautics and Astronautics, Virtual Event, 2–6 August 2021. [Google Scholar] [CrossRef]
- Naser, F.; Peinecke, N.; Schuchardt, B.I. Air Taxis vs. Taxicabs: A Simulation Study on the Efficiency of UAM. In Proceedings of the AIAA AVIATION 2021 FORUM, American Institute of Aeronautics and Astronautics, Virtual Event, 2–6 August 2021. [Google Scholar] [CrossRef]
- Fu, M.; Rothfeld, R.; Antoniou, C. Exploring Preferences for Transportation Modes in an Urban Air Mobility Environment: Munich Case Study. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 427–442. [Google Scholar] [CrossRef] [Green Version]
- Feldhoff, E.; Soares Roque, G. Determining infrastructure requirements for an air taxi service at Cologne Bonn Airport. CEAS Aeronaut. J. 2021, 12, 821–833. [Google Scholar] [CrossRef] [PubMed]
- Rimjha, M.; Hotle, S.; Trani, A.; Hinze, N.; Smith, J.C. Urban Air Mobility Demand Estimation for Airport Access: A Los Angeles International Airport Case Study. In Proceedings of the 2021 Integrated Communications Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 19–23 April 2021; pp. 1–15. [Google Scholar] [CrossRef]
- Rimjha, M.; Li, M.; Hinze, N.; Tarafdar, S.; Hotle, S.; Swingle, H.; Trani, A. Demand Forecast Model Development and Scenarios Generation for Urban Air Mobility Concepts; Contractor or Grantee Report, 20205005881; Virginia Tech Air Transportation Systems Laboratory: Blacksburg, VA, USA, 2020. [Google Scholar]
- Goodrich, K.H.; Barmore, B. Exploratory Analysis of the Airspace Throughput and Sensitivities of an Urban Air Mobility System. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Goyal, R.; Reiche, C.; Fernando, C.; Cohen, A. Advanced Air Mobility: Demand Analysis and Market Potential of the Airport Shuttle and Air Taxi Markets. Sustainability 2021, 13, 7421. [Google Scholar] [CrossRef]
- Frej Vitalle, R.; Zhang, Y.; Normann, B.; Shen, N. A Model for the Integration of UAM operations in and near Terminal Areas. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual Event, 15–19 June 2020. [Google Scholar] [CrossRef]
- Rimjha, M.; Trani, A. Urban Air Mobility: Factors Affecting Vertiport Capacity. In Proceedings of the 2021 Integrated Communications Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 19–23 April 2021; pp. 1–14. [Google Scholar] [CrossRef]
- Taylor, M.; Flenniken, L.; Nembhard, J.; Barreal, A. Design of a Rapid, Reliable Urban Mobility System for the DC Region. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Virtual Conference, 8–10 September 2020. [Google Scholar] [CrossRef]
- Rimjha, M.; Hotle, S.; Trani, A.; Hinze, N. Commuter demand estimation and feasibility assessment for Urban Air Mobility in Northern California. Transp. Res. Part A Policy Pract. 2021, 148, 506–524. [Google Scholar] [CrossRef]
- Patterson, M.D.; Antcliff, K.R.; Kohlman, L.W. A Proposed Approach to Studying Urban Air Mobility Missions Including an Initial Exploration of Mission Requirements. In Proceedings of the 74th Annual American Helicopter Society International Forum and Technology Display 2018 (FORUM 74), Phoenix, AZ, USA, 14–17 May 2018; Curran Associates Inc.: Red Hook, NY, USA, 2018. [Google Scholar]
- Kohlman, L.W.; Patterson, M.D. System-Level Urban Air Mobility Transportation Modeling and Determination of Energy-Related Constraints. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Ploetner, K.O.; Al Haddad, C.; Antoniou, C.; Frank, F.; Fu, M.; Kabel, S.; Llorca, C.; Moeckel, R.; Moreno, A.T.; Pukhova, A.; et al. Long-term application potential of urban air mobility complementing public transport: An upper Bavaria example. CEAS Aeronaut. J. 2020, 11, 991–1007. [Google Scholar] [CrossRef]
- Ploetner, K.O.; Al Haddad, C.; Antoniou, C.; Frank, F.; Fu, M.; Kabel, S.; Llorca, C.; Moeckel, R.; Moreno Chou, T.; Pukhova, A.; et al. Erforschung des Langfristigen Anwendungspotenzials von Urban Air Mobility als Ergänzung zum öffentlichen Personennahverkehr am Beispiel Oberbayern (OBUAM). Available online: https://www.bauhaus-luftfahrt.net/fileadmin/user_upload/OBUAM_Final_Project_Review_external_kom.pdf (accessed on 16 April 2020).
- Niklaß, M.; Dzikus, N.; Swaid, M.; Berling, J.; Lührs, B.; Lau, A.; Terekhov, I.; Gollnick, V. A Collaborative Approach for an Integrated Modeling of Urban Air Transportation Systems. Aerospace 2020, 7, 50. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Y. Integrated Network Design and Demand Forecast for On-Demand Urban Air Mobility. Engineering 2021, 7, 473–487. [Google Scholar] [CrossRef]
- German, B.; Daskilewicz, M.; Hamilton, T.K.; Warren, M.M. Cargo Delivery in by Passenger eVTOL Aircraft: A Case Study in the San Francisco Bay Area. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Chin, C.; Gopalakrishnan, K.; Balakrishnan, H.; Egorov, M.; Evans, A. Efficient and fair traffic flow management for on-demand air mobility. CEAS Aeronaut. J. 2021, 13, 359–369. [Google Scholar] [CrossRef]
- Ferrovial Launches a Project to Develop more than 20 Sustainable Vertiports in Spain Ferrovial. Available online: https://newsroom.ferrovial.com/en/news/ferrovial-launches-a-project-to-develop-more-than-20-sustainable-vertiports-in-spain/ (accessed on 13 March 2022).
- Ferrovial Airports will Deploy a Network of Vertiports in the United Kingdom Ferrovial. Available online: https://newsroom.ferrovial.com/en/news/ferrovial-airports-will-deploy-a-network-of-vertiports-in-the-united-kingdom/ (accessed on 13 March 2022).
- Ferrovial and Lilium to develop US Vertiport Network-Lilium. Available online: https://lilium.com/newsroom-detail/ferrovial-and-lilium-develop-us-vertiport-network (accessed on 13 March 2022).
- Volocopter GmbH. Volocopter Expects to Generate SGD 4.18 billion for Singapore by 2030. Available online: https://www.volocopter.com/newsroom/vc-generates-sgd-4bn/ (accessed on 13 March 2022).
- Vascik, P.D.; Hansman, R.J. Evaluation of Key Operational Constraints Affecting On-Demand Mobility for Aviation in the Los Angeles Basin: Ground Infrastructure, Air Traffic Control and Noise. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; American Institute of Aeronautics and Astronautics: Denver, CO, USA, 2017. [Google Scholar] [CrossRef]
- Vascik, P.D.; Hansman, R.J.; Dunn, N.S. Analysis of Urban Air Mobility Operational Constraints. J. Air Transp. 2018, 26, 133–146. [Google Scholar] [CrossRef]
- Benkö, L. Mobilität der Zukunft Lufttaxi Uber Air Skyports. Available online: https://www.ubm-development.com/magazin/uber-air-skyport/ (accessed on 30 August 2020).
- Foster + Partners unveils Uber Air Skyport for Santa Clara. Available online: https://www.dezeen.com/2019/06/19/uber-air-skyport-foster-partners-santa-clara/ (accessed on 22 February 2021).
- SHoP and Gensler reveal designs for Uber Air Skyports. Available online: https://www.dezeen.com/2019/06/12/uber-air-skyports-shop-architects-gensler/ (accessed on 22 February 2021).
- BOKA Powell. Uber Air 2023 Skyport Mobility Hub Concepts. Available online: http://www.bokapowell.com/project/uber-air-2023-skyport-mobility-hub-concepts/ (accessed on 22 February 2021).
- MVRDV. MVRDV-Airbus UAM. Available online: https://www.mvrdv.nl/projects/421/airbus-uam (accessed on 30 May 2022).
- Urban-Air Port. Available online: https://www.urbanairport.com (accessed on 13 March 2022).
- Gannett Fleming. Uber SKYPORT by Gannett Fleming. Available online: https://www.youtube.com/watch?v=WxBmpCwngVI (accessed on 22 February 2021).
- The Hive: Uber Elevate Design Competition. Available online: https://www.beckgroup.com/projects/the-hive-uber-elevate-design-competition/ (accessed on 22 February 2021).
- Chilton, P. Uber Sky Tower. Available online: https://www.pickardchilton.com/work/uber-sky-tower (accessed on 28 January 2022).
- Institute of Flight Guidance-HorizonUAM. Available online: https://www.dlr.de/fl/en/desktopdefault.aspx/tabid-1149/1737_read-69326/ (accessed on 10 June 2022).
- World-First Hub for Flying Taxis, Air-One, Opens in Coventry, UK, Heralding a New Age of Zero-Emission Transport. Available online: https://www.urbanairport.com/uap-blog/world-first-hub-for-flying-taxis-air-one-opens-in-coventry-uk (accessed on 30 May 2022).
- Lilium GmbH. Designing a Scalable Vertiport. Available online: https://lilium.com/newsroom-detail/designing-a-scalable-vertiport (accessed on 16 August 2021).
- Taylor, M.; Saldanli, A.; Park, A. Design of a Vertiport Design Tool. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Virtual Conference, 8–10 September 2020; pp. 2A2-1–2A2-12. [Google Scholar] [CrossRef]
- Preis, L. Quick Sizing, Throughput Estimating and Layout Planning for VTOL Aerodromes—A Methodology for Vertiport Design. In Proceedings of the AIAA Aviation 2021 Forum, Virtual Event, 2–6 August 2021. [Google Scholar] [CrossRef]
- Preis, L.; Hack Vazquez, M. Vertiport Throughput Capacity under Constraints caused by Vehicle Design, Regulations and Operations. In Proceedings of the Delft International Conference on Urban Air-Mobility (DICUAM), Delft, The Netherlands, 22–24 March 2022. [Google Scholar]
- Courtin, C.; Burton, M.J.; Yu, A.; Butler, P.; Vascik, P.D.; Hansman, R.J. Feasibility Study of Short Takeoff and Landing Urban Air Mobility Vehicles using Geometric Programming. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Volocopter GmbH. Volocopter VoloPort: The Efficient & Ready-Made Vertiport Network Solution for Urban eVTOL Operations. Available online: https://www.volocopter.com/newsroom/voloport-efficient-vertiport/ (accessed on 13 March 2022).
- Vascik, P.D.; Hansman, J.R. Development of Vertiport Capacity Envelopes and Analysis of Their Sensitivity to Topological and Operational Factors. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 409. [Google Scholar] [CrossRef]
- Zelinski, S. Operational Analysis of Vertiport Surface Topology. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC) Proceedings, Virtual Conference, 11–16 October 2020; p. 10. [Google Scholar] [CrossRef]
- Guerreiro, N.M.; Hagen, G.E.; Maddalon, J.M.; Butler, R.W. Capacity and Throughput of Urban Air Mobility Vertiports with a First-Come, First-Served Vertiport Scheduling Algorithm. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual Event, 15–19 June 2020. [Google Scholar] [CrossRef]
- Preis, L.; Amirzada, A.; Hornung, M. Ground Operation on Vertiports - Introduction of an Agent-Based Simulation Framework. In Proceedings of the AIAA SciTech 2021 Forum, Virtual Event, 11–21 January 2021. [Google Scholar] [CrossRef]
- Preis, L.; Hornung, M. Identification of Driving Processes for Vertiport Operations Using Agent-Based Simulation. In Proceedings of the AIAA SciTech 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar] [CrossRef]
- Drwiega, A. A Day at the (Motor) Races Beats the Recession. Available online: https://www.rotorandwing.com/2012/05/29/a-day-at-the-motor-races-beats-the-recession/ (accessed on 7 March 2022).
- Swanson, D. Designing ‘Vertiports’ To Cater For The Evtol Revolution. Available online: https://www.linkedin.com/pulse/designing-vertiports-cater-evtol-revolution-darrell-swanson (accessed on 2 February 2021).
- Volocopter GmbH. Infrastructure to Integrate and Scale Air Taxi Services in Cities. Available online: https://volocopter-statics.azureedge.net/content/uploads/2018_04_05_Volo_Hub_Overview_without_roof1-scaled.jpg (accessed on 26 August 2021).
- Volocopter GmbH. First Air Taxi Volo-Port to be Built by End of 2019. Available online: https://volocopter-statics.azureedge.net/content/uploads/190522_VOL_View05_Interior021-scaled.jpg (accessed on 24 February 2022).
- Guo, R.; Zhang, Y.; Wang, Q. Comparison of emerging ground propulsion systems for electrified aircraft taxi operations. Transp. Res. Part C Emerg. Technol. 2014, 44, 98–109. [Google Scholar] [CrossRef]
- Preis, L.; Hornung, M. Vertiport Operations Modeling, Agent-Based Simulation and Parameter Value Specification. Electronics 2022, 11, 1071. [Google Scholar] [CrossRef]
- Rothfeld, R.; Fu, M.; Balac, M.; Antoniou, C. Potential Urban Air Mobility Travel Time Savings: An Exploratory Analysis of Munich, Paris, and San Francisco. Sustainability 2021, 13, 2217. [Google Scholar] [CrossRef]
- Engelmann, M.; Hornung, M. Boarding Process Assessment of the AVACON Research Baseline Aircraft. In Proceedings of the Deutscher Luft- und Raumfahrtkongress DLRK. Deutsche Gesellschaft fur Luft- und Raumfahrt—Lilienthal-Oberth e.V., Bremen, Germany, 31 August–2 September 2021; Available online: https://publikationen.dglr.de/?tx_dglrpublications_pi1%5bdocument_id%5d=490049 (accessed on 24 February 2022).
- Schultz, M.; Reitmann, S. Prediction of passenger boarding progress using neural network approach. In Proceedings of the 8th International Conference on Research in Air Transportation (ICRAT), Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- Sieb, P.; Michelmann, J.; Flöter, F.; Kai, W. Towards Minimum Expenditure MRO Concepts for UAM through Vehicle Design and Operational Modelling. In Proceedings of the Deutscher Luft- und Raumfahrtkongress (DLRK), Bremen, Germany, 31 August–2 September 2021. [Google Scholar]
- Naru, R.; German, B. Maintenance Considerations for Electric Aircraft and Feedback from Aircraft Maintenance Technicians. In Proceedings of the 18th AIAA Aviation Technology, Integration, and Operations Conference 2018, Atlanta, GA, USA, 25–29 June 2018; Curran Associates Inc.: Red Hook, NY, USA, 2018. [Google Scholar] [CrossRef]
- Justin, C.Y.; Payan, A.P.; Briceno, S.I.; German, B.J.; Mavris, D.N. Power optimized battery swap and recharge strategies for electric aircraft operations. Transp. Res. Part C Emerg. Technol. 2020, 115, 102605. [Google Scholar] [CrossRef]
- Volocopter. VoloCity: Design specifications, Calculated Approximations not yet Tested in Flight. Available online: https://www.volocopter.com/solutions/volocity/ (accessed on 22 July 2021).
- Volocopter. Pioneering The Urban Air Taxi Revolution. Available online: www.volocopter.com/content/uploads/Volocopter-WhitePaper-1-01.pdf (accessed on 15 March 2022).
- NIO. Nio launcht Akkutausch-Station der zweiten Generation. Available online: https://www.electrive.net/2021/04/15/nio-launcht-akkutausch-station-der-zweiten-generation/ (accessed on 13 June 2022).
- Geely. Gone in 90 Seconds: Geely’s Solution to Vehicle Charging. Available online: http://zgh.com/media-center/story/gone-in-90-seconds/?lang=en (accessed on 6 July 2021).
- Paul, C.S. Definitions of Tactical and Strategic: An Informal Study. Technical Memorandum NASA/TM-2004-213024. 2004. Available online: https://ntrs.nasa.gov/api/citations/20040191538/downloads/20040191538.pdf (accessed on 11 July 2022).
- Windhorst, R.D.; Lauderdale, T.A.; Sadovsky, A.V.; Phillips, J.; Chu, Y.C. Strategic and Tactical Functions in an Autonomous Air Traffic Management System. In Proceedings of the AIAA AVIATION 2021 FORUM, Virtual Event, 2–6 August 2021. [Google Scholar] [CrossRef]
- Why Air traffic Flow & Capacity Management. Available online: https://www.icao.int/MID/Documents/2019/ACAO-ICAO%20ATFM%20Workshop/1.4.3-%20ACAO%20last%20V7presentation%20-%20Copy-converti-1.pdf (accessed on 22 December 2021).
- Urban Air Mobility Concept of Operations for the London Environment. Available online: https://eveairmobility.com/wp-content/uploads/2022/03/UK_Air_Mobility_Consortium_CONOPS.pdf (accessed on 4 March 2022).
- Schweiger, K.; Knabe, F.; Korn, B. Urban Air Mobility: Vertidrome Airside Level of Service Concept. In Proceedings of the AIAA AVIATION 2021 FORUM, Virtual Event, 2–6 August 2021. [Google Scholar] [CrossRef]
- Geister, D.; Korn, B. Density based Management Concept for Urban Air Traffic. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Sunil, E.; Hoekstra, J.; Ellerbroek, J.; Vidosavljevic, A.; Arntzen, M.; Aalmoes, R. Metropolis WP5 Results of Simulations and Data Analysis. Available online: https://homepage.tudelft.nl/7p97s/Metropolis/ (accessed on 13 March 2022).
- Metropolis 2. Deliverables. Available online: https://metropolis2.eu/deliverables/ (accessed on 31 May 2022).
- Blamey, J.; Sánches-Escalonilla, P.; Chornique Sanchez, J.; Hampson, C.; Hervías Vallejo, P.; Martínez López, M.; Janisch, D.; Löhr, F.; Stridsman, L. AURA Solution 2 Workshop. 2021. Available online: https://www.pj34aura.com/sites/aura/files/documents/aura_solution_2_workshop_slides.pdf (accessed on 11 July 2022).
- Thipphavong, D.P.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.H.; Homola, J.; et al. Urban Air Mobility Airspace Integration Concepts and Considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018; American Institute of Aeronautics and Astronautics: Atlanta, GA, USA, 2018. [Google Scholar] [CrossRef] [Green Version]
- Guerreiro, N.M.; Butler, R.W.; Maddalon, J.M.; Hagen, G.E. Mission Planner Algorithm for Urban Air Mobility—Initial Performance Characterization. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Tang, H.; Zhang, Y.; Mohmoodian, V.; Charkhgard, H. Automated flight planning of high-density urban air mobility. Transp. Res. Part C Emerg. Technol. 2021, 131, 103324. [Google Scholar] [CrossRef]
- Bosson, C.; Lauderdale, T.A. Simulation Evaluations of an Autonomous Urban Air Mobility Network Management and Separation Service. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef] [Green Version]
- Ortlieb, M.; Adolf, F.M.; Holzapfel, F. Computation of a Database of Trajectories and Primitives for Decision-Based Contingency Management of UAVs over Congested Areas. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Gariel, M.; Srivastava, A.N.; Feron, E. Trajectory Clustering and an Application to Airspace Monitoring. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1511–1524. [Google Scholar] [CrossRef] [Green Version]
- Barratt, S.T.; Kochenderfer, M.J.; Boyd, S.P. Learning Probabilistic Trajectory Models of Aircraft in Terminal Airspace From Position Data. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3536–3545. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Hansman, R.J.; Palacios, R.; Welsch, R. Anomaly detection via a Gaussian Mixture Model for flight operation and safety monitoring. Transp. Res. Part C Emerg. Technol. 2016, 64, 45–57. [Google Scholar] [CrossRef]
- Krozel, J. Intelligent Tracking of Aircraft in the National Airspace System. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002; American Institute of Aeronautics and Astronautics: Monterey, CA, USA, 2002. [Google Scholar] [CrossRef]
- Georgiou, H.; Pelekis, N.; Sideridis, S.; Scarlatti, D.; Theodoridis, Y. Semantic-aware aircraft trajectory prediction using flight plans. Int. J. Data Sci. Anal. 2020, 9, 215–228. [Google Scholar] [CrossRef]
- Weinert, A.; Underhill, N.; Serres, C.; Guendel, R. Correlated Bayesian Model of Aircraft Encounters in the Terminal Area Given a Straight Takeoff or Landing. Aerospace 2022, 9, 58. [Google Scholar] [CrossRef]
- Pradeep, P.; Wei, P. Energy Optimal Speed Profile for Arrival of Tandem Tilt-Wing eVTOL Aircraft with RTA Constraint. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Pradeep, P.; Wei, P. Energy-Efficient Arrival with RTA Constraint for Multirotor eVTOL in Urban Air Mobility. J. Aerosp. Inf. Syst. 2019, 16, 263–277. [Google Scholar] [CrossRef]
- Pradeep, P.; Wei, P. Heuristic Approach for Arrival Sequencing and Scheduling for eVTOL Aircraft in On-Demand Urban Air Mobility. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Kleinbekman, I.C.; Mitici, M.A.; Wei, P. eVTOL Arrival Sequencing and Scheduling for On-Demand Urban Air Mobility. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; p. 7. [Google Scholar] [CrossRef] [Green Version]
- Kleinbekman, I.; Mitici, M.A.; Wei, P. A Rolling-horizon eVTOL Arrival Scheduling for On-demand Urban Air Mobility. J. Aerosp. Inf. Syst. 2019, 17, 150–159. [Google Scholar] [CrossRef]
- Bertram, J.; Wei, P. An Efficient Algorithm for Self-Organized Terminal Arrival in Urban Air Mobility. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Song, K.; Yeo, H.; Moon, J.H. Approach Control Concepts and Optimal Vertiport Airspace Design for Urban Air Mobility (UAM) Operation. Int. J. Aeronaut. Space Sci. 2021, 22, 982–994. [Google Scholar] [CrossRef]
- Song, K.; Yeo, H. Development of optimal scheduling strategy and approach control model of multicopter VTOL aircraft for urban air mobility (UAM) operation. Transp. Res. Part C Emerg. Technol. 2021, 128, 103181. [Google Scholar] [CrossRef]
- Shao, Q.; Shao, M.; Lu, Y. Terminal area control rules and eVTOL adaptive scheduling model for multi-vertiport system in urban air Mobility. Transp. Res. Part C Emerg. Technol. 2021, 132, 103385. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Carr, S.; Neogi, N.; Topcu, U. Decentralized Control Synthesis for Air Traffic Management in Urban Air Mobility. IEEE Trans. Control. Netw. Syst. 2021, 8, 598–608. [Google Scholar] [CrossRef]
- Vascik, P.D.; John Hansman, R. Evaluating the Interoperability of Urban Air Mobility Systems and Airports. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 1–14. [Google Scholar] [CrossRef]
- Fitzek, R.A. Lessons Gained in Helicopter Air Traffic Control from Federal Aviation Agency Activities. J. R. Aeronaut. Soc. 1962, 66, 499–502. [Google Scholar] [CrossRef]
- Ahrenhold, N. Entwurf und Evaluation einer luftseitigen Kapazitätsprognoserechnung für den Einfluss von Lufttaxis am Beispiel des Flughafens Hamburg. Master’s Thesis, Technische Universität Carolo-Wilhelmina zu Braunschweig, Braunschweig, Germany, 2021. [Google Scholar]
- Verma, S.; Keeler, J.; Edwards, T.E.; Dulchinos, V. Exploration of Near term Potential Routes and Procedures for Urban Air Mobility. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef] [Green Version]
- Petersen, J.D.; Alexander, R.J.; Swaintek, S.S. Dynamic vertiport configuration. U.S. Patent US20200226937A1, 16 July 2020. [Google Scholar]
- Steiner, M. Urban Air Mobility: Opportunities for the Weather Community. Bull. Am. Meteorol. Soc. 2019, 100, 2131–2133. [Google Scholar] [CrossRef]
- Justin, C.Y.; Mavris, D.N. Environment Impact on Feasibility of Sub-Urban Air Mobility using STOL Vehicles. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Somers, L.A.; Justin, C.Y.; Mavris, D.N. Wind and Obstacles Impact on Airpark Placement for STOL-based Sub-Urban Air Mobility. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, 17–21 June 2019. [Google Scholar] [CrossRef]
- Reiche, C.; Brody, F.; McGillen, C.; Siegel, J.; Cohen, A. An Assessment of the Potential Weather Barriers of Urban Air Mobility (UAM). Final Report, 21 November 2018. Available online: https://escholarship.org/uc/item/2pc8b4wt (accessed on 24 February 2022).
- Steiner, M. Weather Challenges for Advanced Aerial Mobility in Urban Environments. Available online: https://vtol.org/files/dmfile/20200422---matthias-steiner---ncar---weather-challenges---no-animations2.pdf (accessed on 14 March 2022).
- Berchoff, D. Weather-Resilient AAM Operations in Urban Environments. Available online: https://vtol.org/files/dmfile/20200422---don-berchoff---truweather---weather-solutions.pdf (accessed on 9 September 2021).
- Deutscher Wetterdienst. Urban Heat Islands. Available online: https://www.dwd.de/EN/research/climateenvironment/climate_impact/urbanism/urban_heat_island/urbanheatisland.html (accessed on 3 February 2021).
- Yilmaz, E.; Warren, M.; German, B. Energy and Landing Accuracy Considerations for Urban Air Mobility Vertiport Approach Surfaces. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Veneruso, P.; Opromolla, R.; Fasano, G.; Burgio, G.; Gentile, G.; Tiana, C. Extending Enhanced Visual Operations to Urban Air Mobility: Requirements and Approaches. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Volocopter GmbH. Urban Air Mobility. Available online: https://www.volocopter.com/urban-air-mobility/ (accessed on 22 May 2022).
- Alcock, C. Ground Infrastructure Experts Wrestle With Vertiport Challenges. Available online: https://www.futureflight.aero/news-article/2021-12-20/ground-infrastructure-experts-wrestle-vertiport-challenges (accessed on 27 March 2022).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



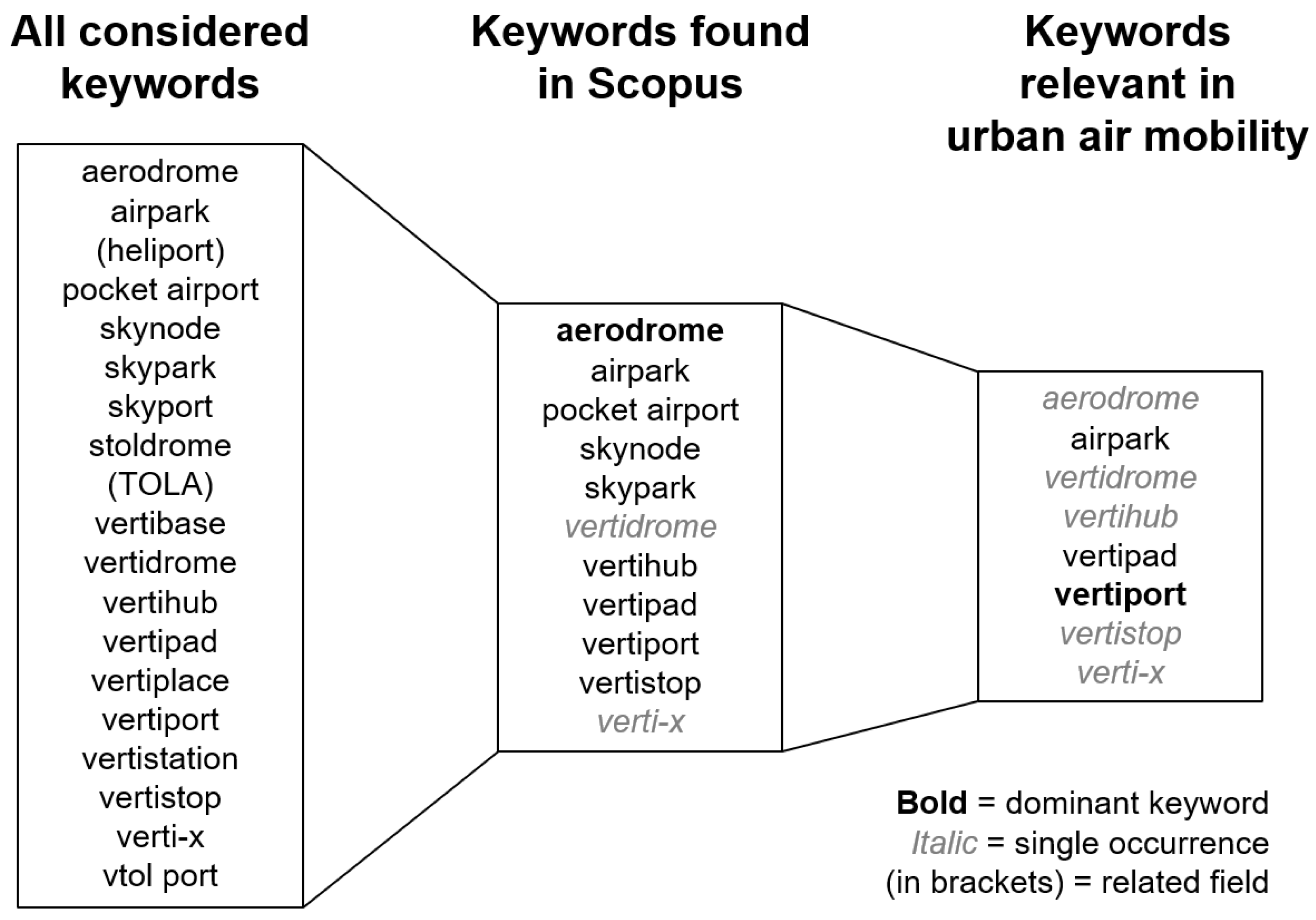
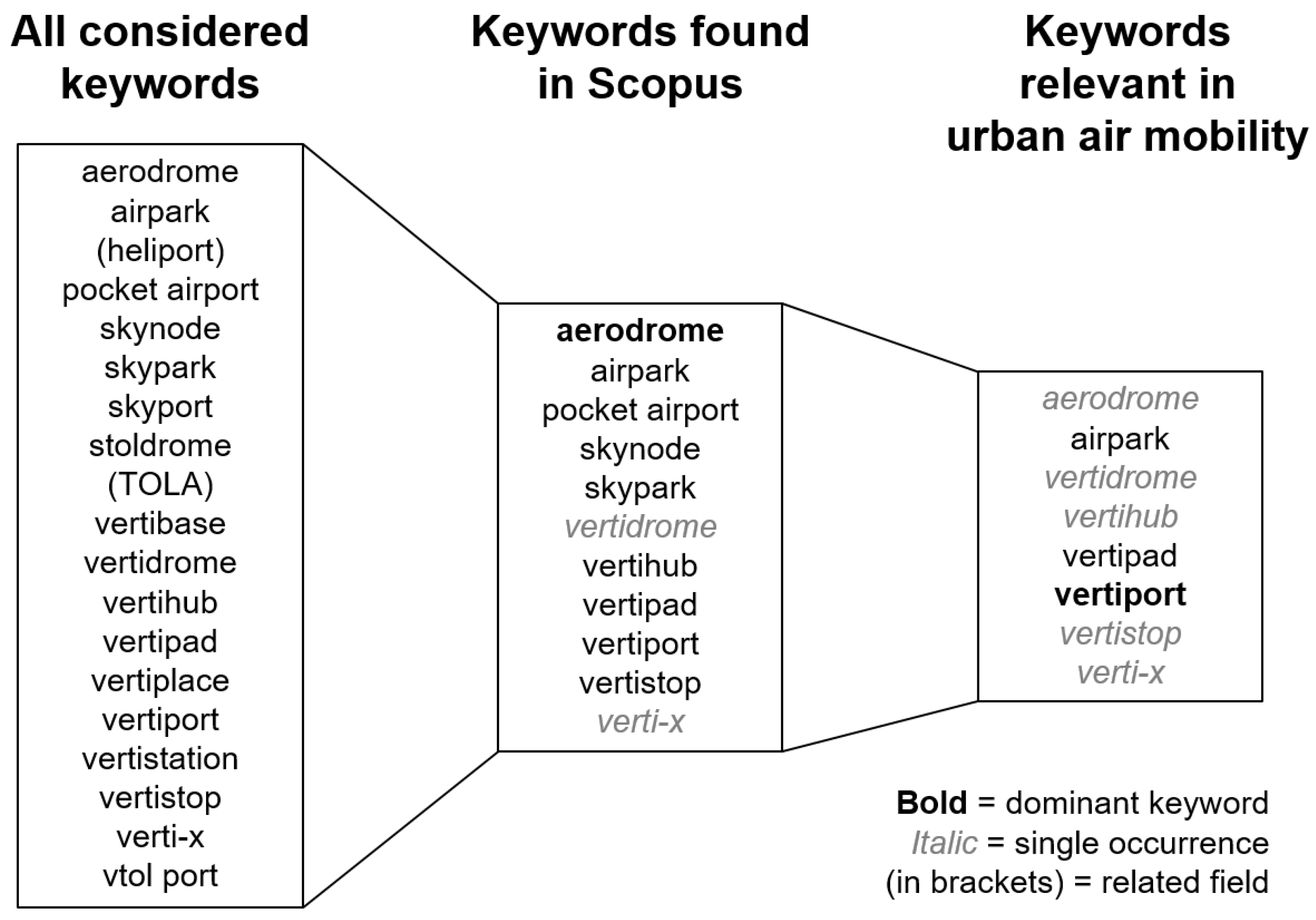
| Keyword | Scopus All Years | Past Two Decades (2000–2021) | Past 10 Years (2012–2021) | Since UBER Elevate (2016–2021) |
|---|---|---|---|---|
| aerodrome | 662 | 536 | 383 | 296 |
| airpark | 30 | 27 | 12 | 9 |
| pocket airport | 2 | 2 | 2 | 1 |
| skynode | 23 | 23 | 13 | 8 |
| skypark | 6 | 5 | 5 | 4 |
| vertidrome | 1 | 1 | 1 | 1 |
| vertihub | 2 | 2 | 2 | 2 |
| vertipad | 4 | 6 | 6 | 6 |
| vertiport | 82 | 63 | 62 | 60 |
| vertistop | 2 | 2 | 2 | 2 |
| verti-x | 1 | 1 | 1 | 1 |
| ine Size of database without duplicates | 810 | 689 | 500 | 396 |
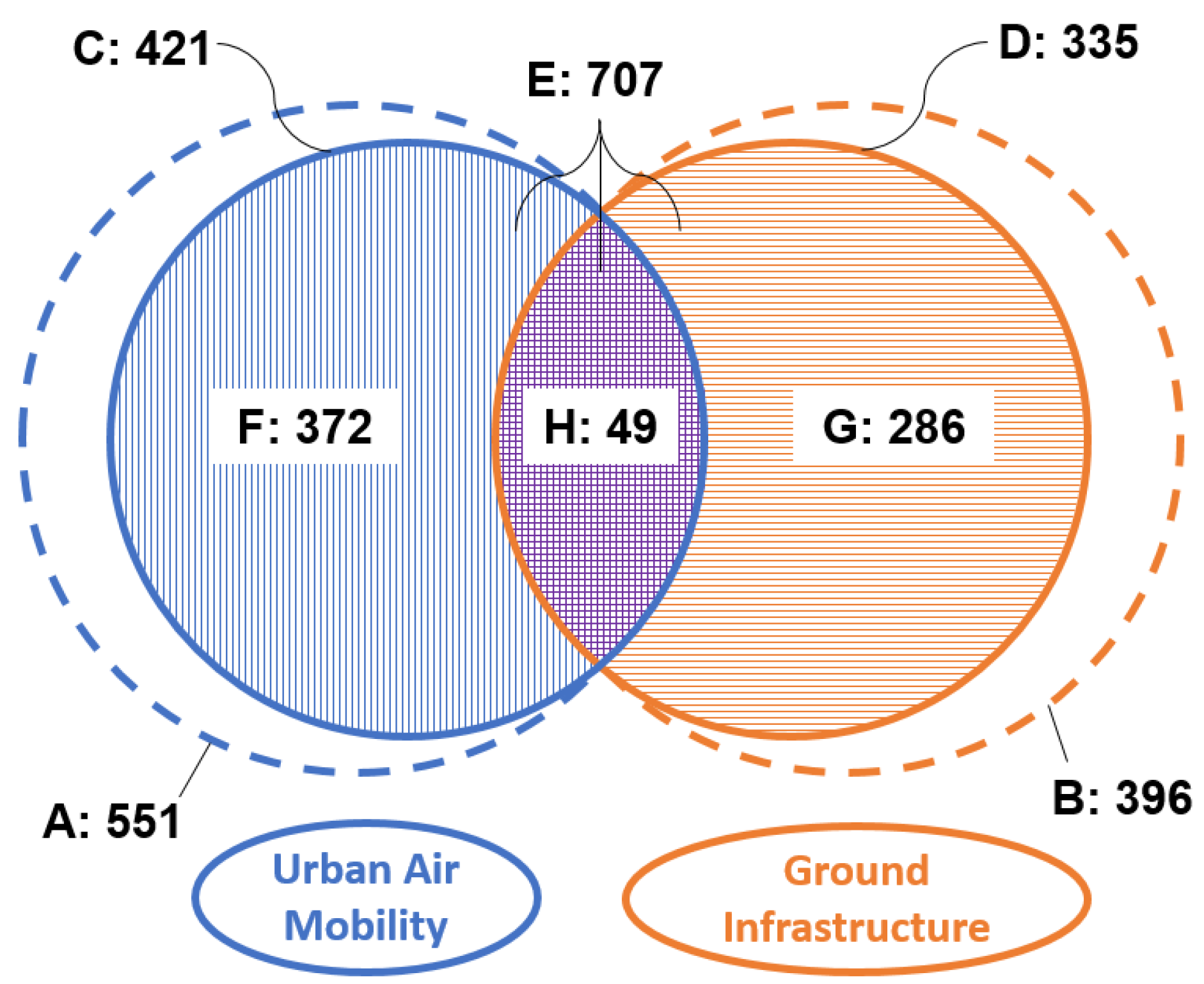
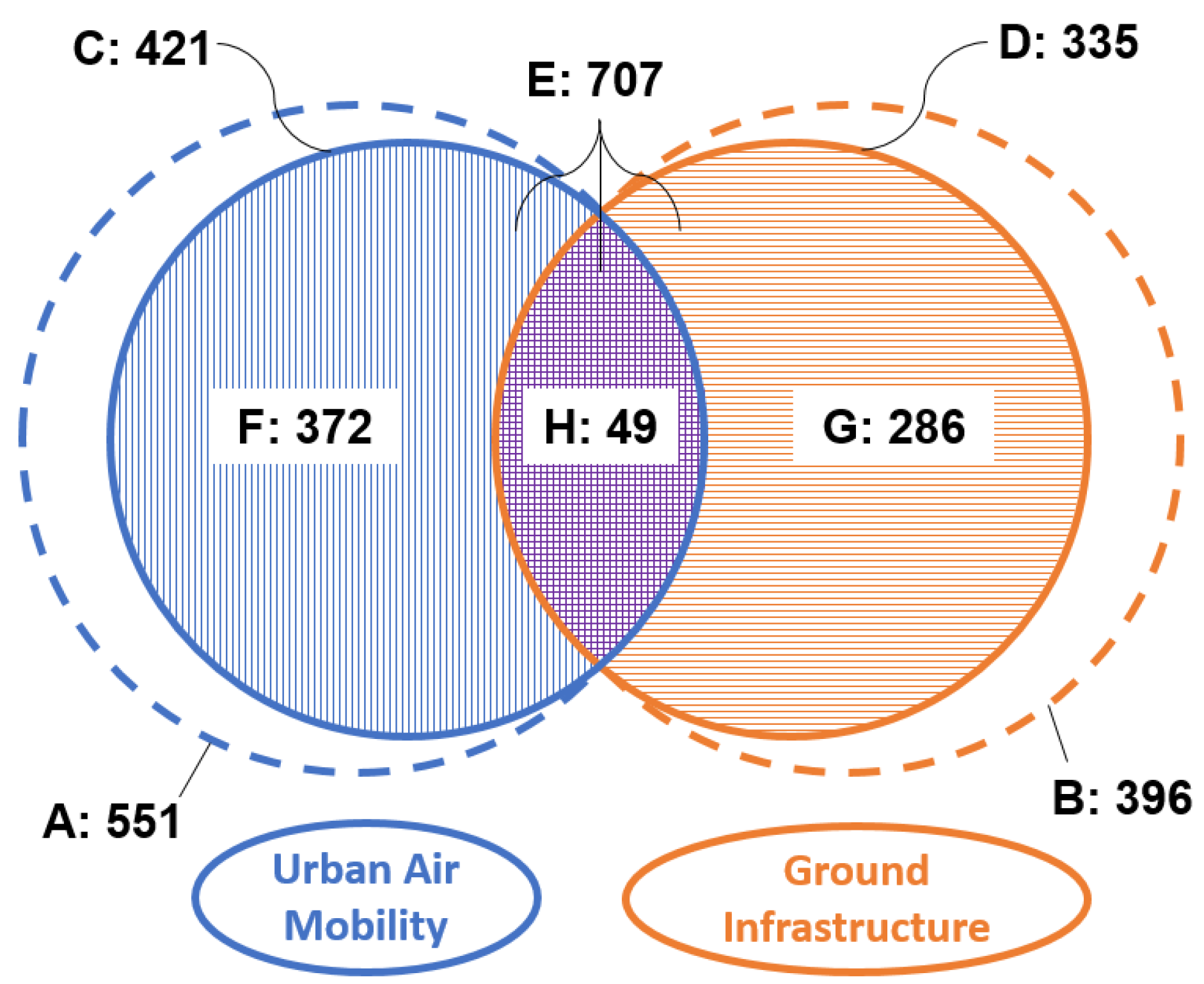
| Set | Descripton | Size | Mathematical Relation of Sets |
|---|---|---|---|
| A | UAM all publications | 551 | |
| B | GI all publications | 396 | |
| C | UAM only publications with DOI | 421 | - |
| D | GI only publications with DOI | 335 | - |
| E | UAM and GI combined | 707 | E = |
| F | UAM exclusive | 372 | F = |
| G | GI exclusive | 286 | G = |
| H | UAM and GI shared | 49 | H = |
| Keyword | Hits |
|---|---|
| aerodrome | 1 |
| airpark | 4 |
| vertidrome | 1 |
| vertihub | 1 |
| vertipad | 4 |
| vertiport | 40 |
| vertistop | 1 |
| verti-x | 1 |
| total hits | 49 |
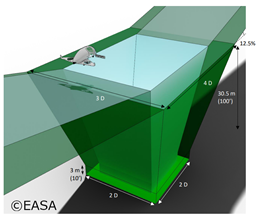 | Parameter | Short Description | Reference Volume Type 1 |
| D | D-Value | VTOL aircraft specific | |
| Low hover height | 3 m | ||
| High hover height | 30.5 m | ||
| Width at | 3 D | ||
| Front distance at | 2 D | ||
| Back distance at | 2 D | ||
| Width of the FATO | 2 D | ||
| Front distance of the FATO | 1 D | ||
| Back distance of the FATO | 1 D | ||
| Slope of approach surface | 12.5% | ||
| Slope of departure surface | 12.5% |
| Description | FAA | EASA | International |
|---|---|---|---|
| UTM airspace | below 400 ft (AGL) [72] | up to 500 ft (AGL) [51] | - |
| Main focus of reviewed reports | UAS/UAM [19,72] | (s)UAS/(UAM) [48] | UAS/(UAM) (see Section 2.3) |
| First mention of vertiports in the context of UTM | 2020 [19] | 2019 [48] | (2018/20) [74,79] |
| VTOL aircraft dimensions | Control dimension [18] (historically tip-to-tip span [57]) | Enclosing circle D [22] | maximum dimension [73] |
| Pad dimensions (references same as aircraft) | TLOF FATO Safety Area | FATO | TLOF = 2 under-carriage FATO Safety Area |
| Pad symbol | cross [18] | letter “V” [22] | - |
| Approach/departure slope | (8:1) [18] | [22] | - |
| Vertical segment as part of approach/departure path | no [18] | yes [22] | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. https://doi.org/10.3390/drones6070179
Schweiger K, Preis L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones. 2022; 6(7):179. https://doi.org/10.3390/drones6070179
Chicago/Turabian StyleSchweiger, Karolin, and Lukas Preis. 2022. "Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations" Drones 6, no. 7: 179. https://doi.org/10.3390/drones6070179
APA StyleSchweiger, K., & Preis, L. (2022). Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones, 6(7), 179. https://doi.org/10.3390/drones6070179