
Quadrotor Formation Control via Terminal Sliding Mode Approach: Theory and Experiment Results

 ,
,  ,
,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We develop formation tracking control with a disturbance observer—the proposed method can provide faster finite-time convergence, less steady-state errors, and robustness;
- The stability of the whole system is validated using Lyapunov theory;
- We compare the proposed method with the existing algorithm in [41];
- We implement it on a real quadcopter platform for verification, which is lacking in [41].
2. Preliminaries and Multi-Agent System
2.1. Notation
2.2. Graph Theory
2.3. Multi-Agent System
2.4. Control Objective
3. Disturbance Observer Design
4. Formation Tracking Control Design
5. Simulation Results
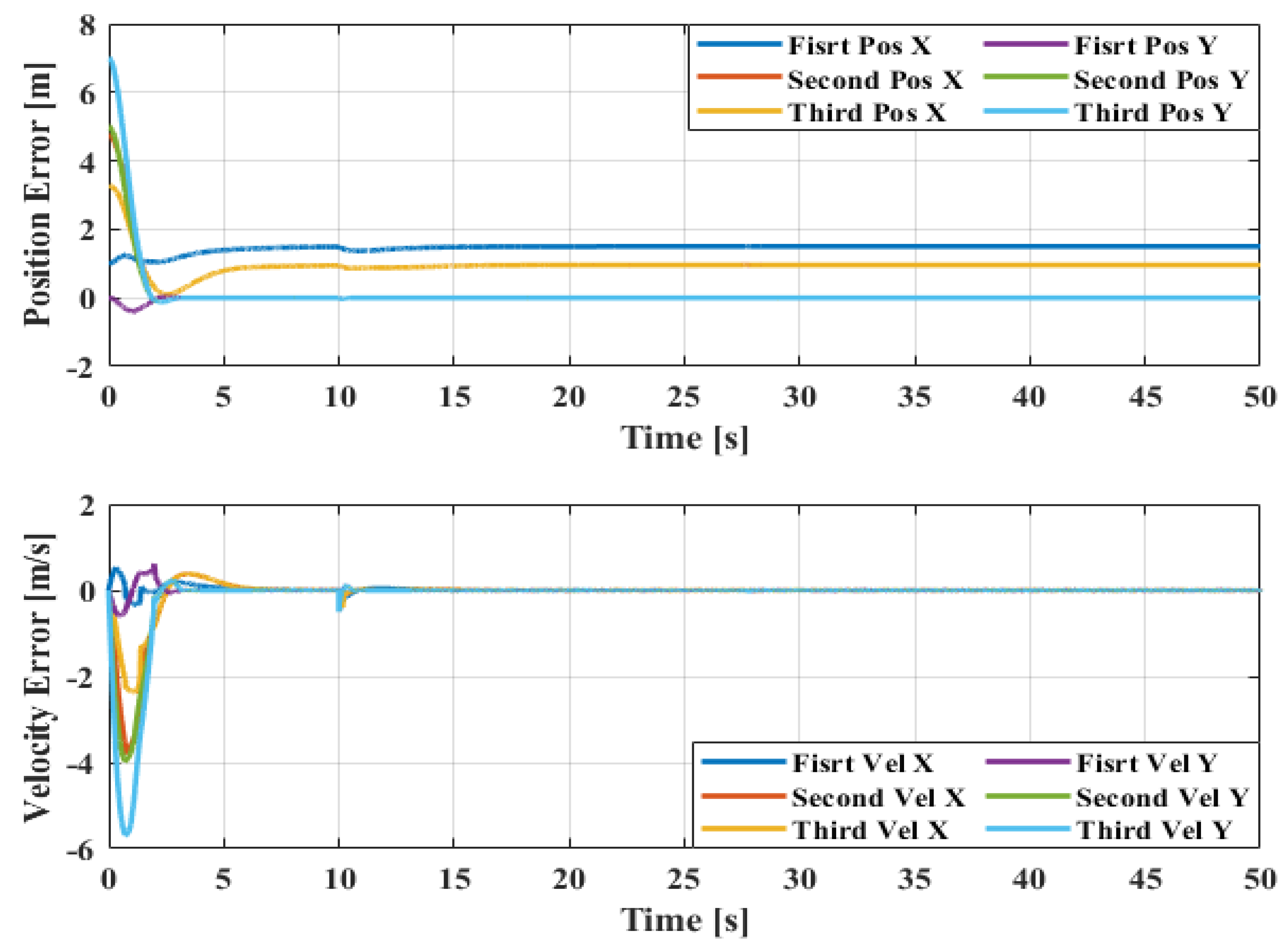
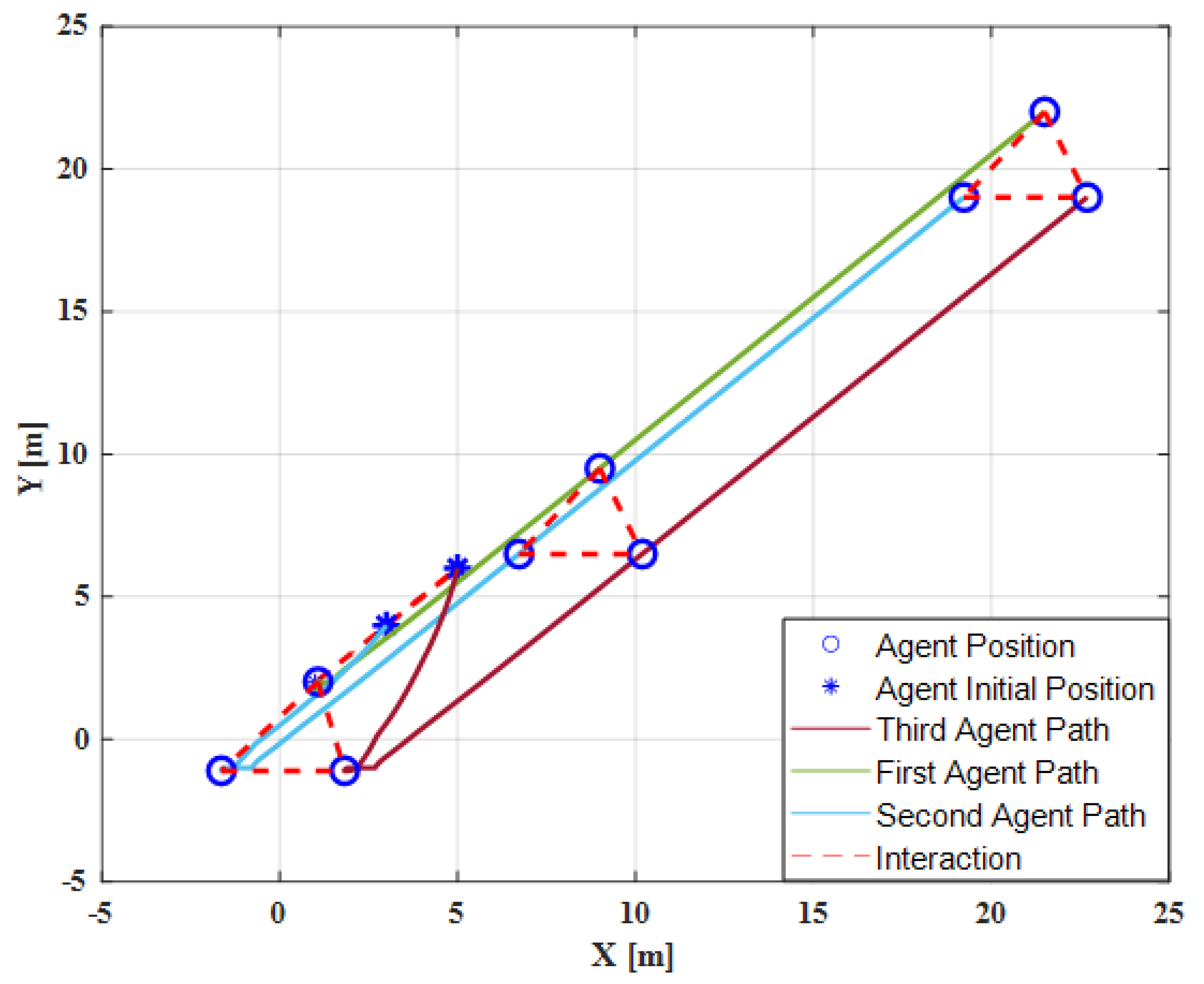
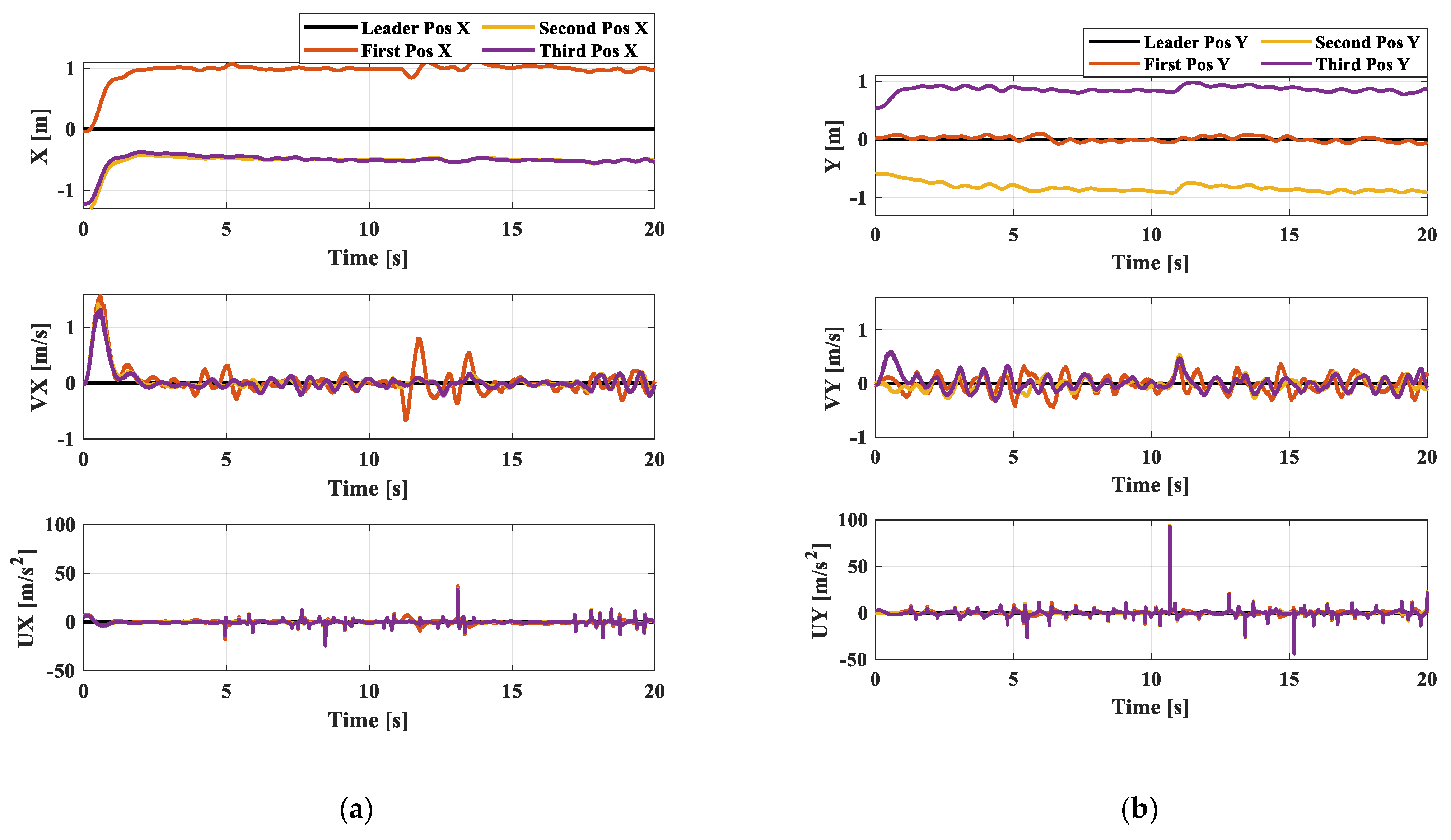
5.1. Case 1: Absence of Disturbance Observer Mechanism
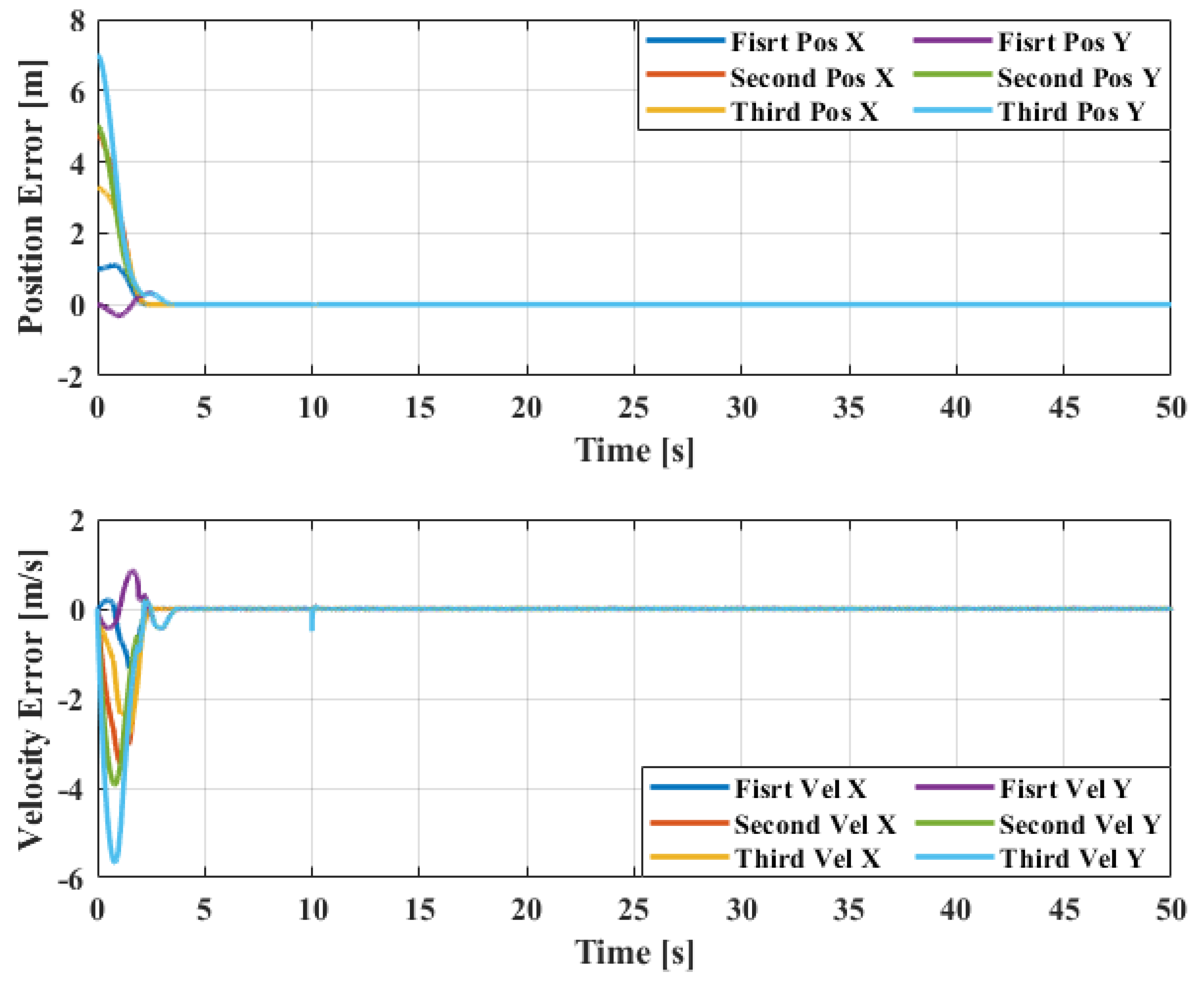
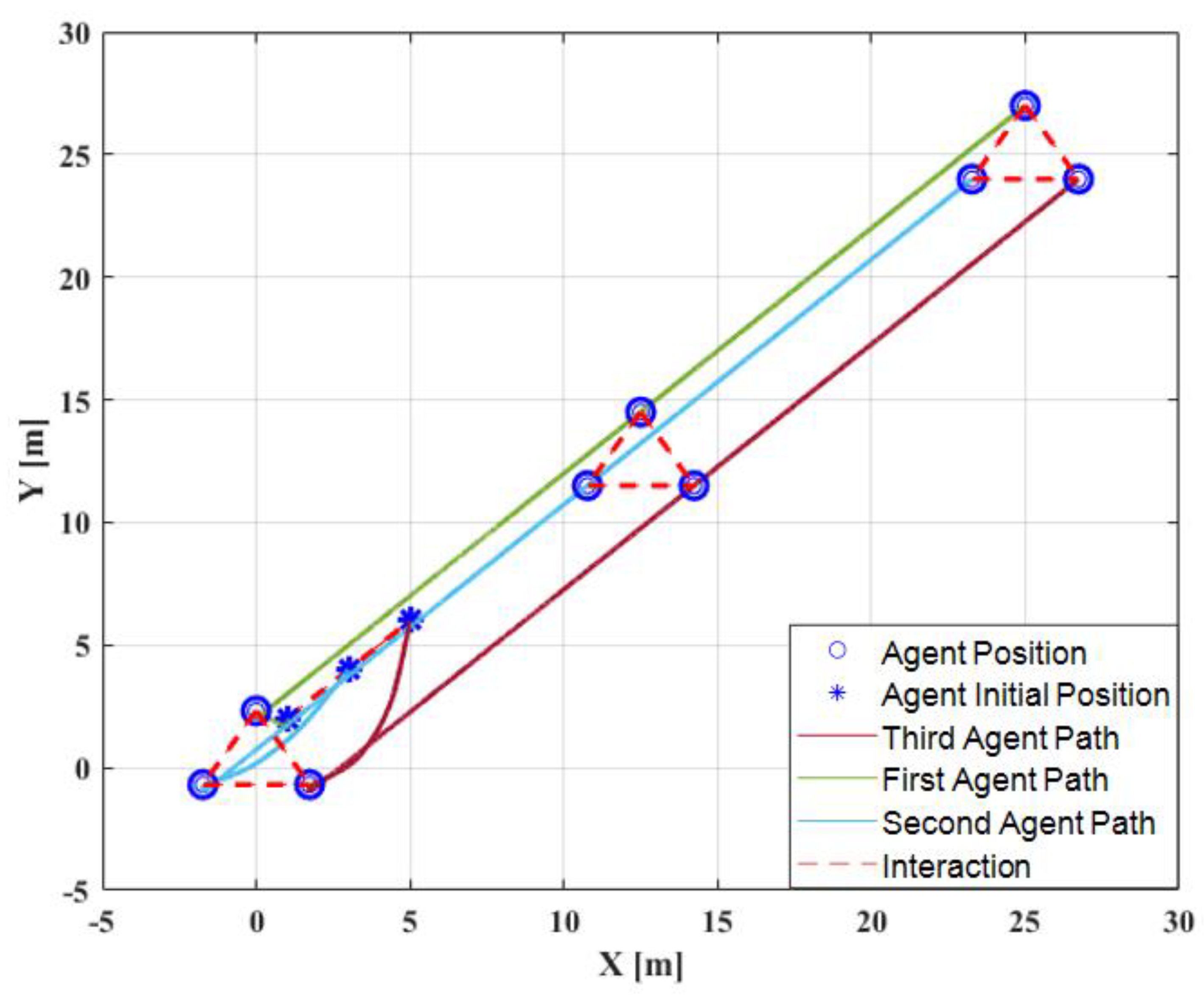
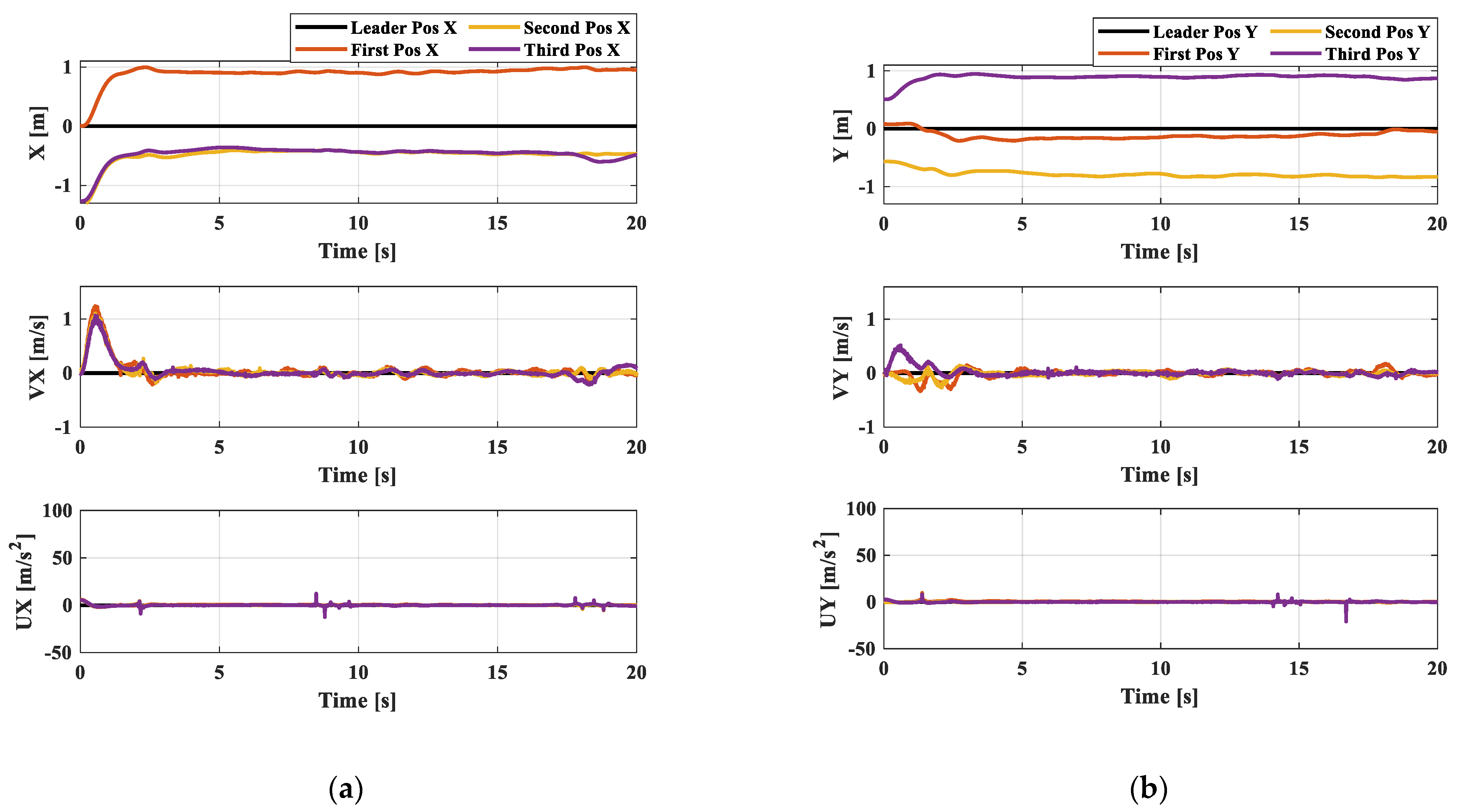
5.2. Case 2: Presence of Disturbance of Observer Mechanism
6. Experiment
6.1. Experimental Setup
6.2. Experimental Results
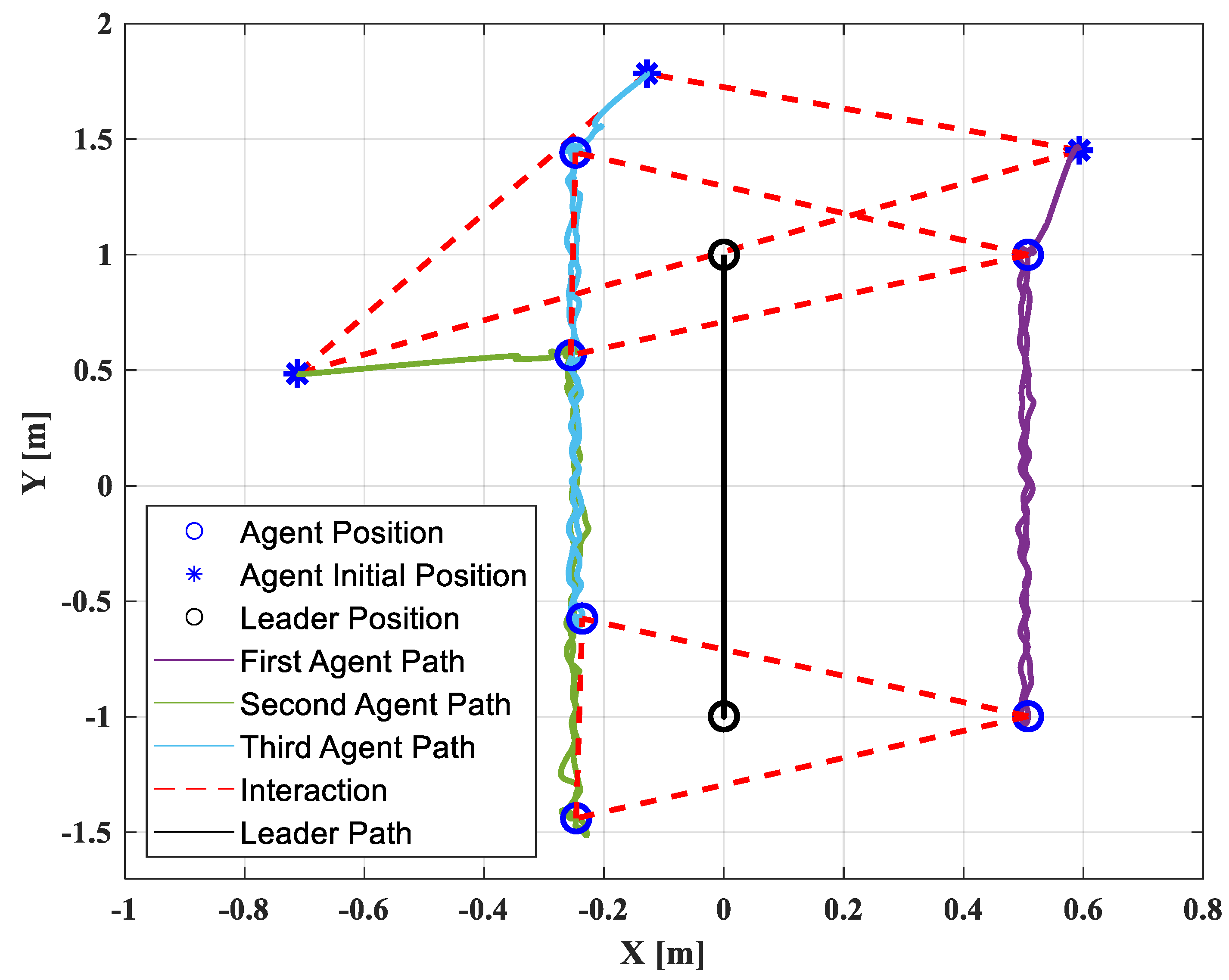
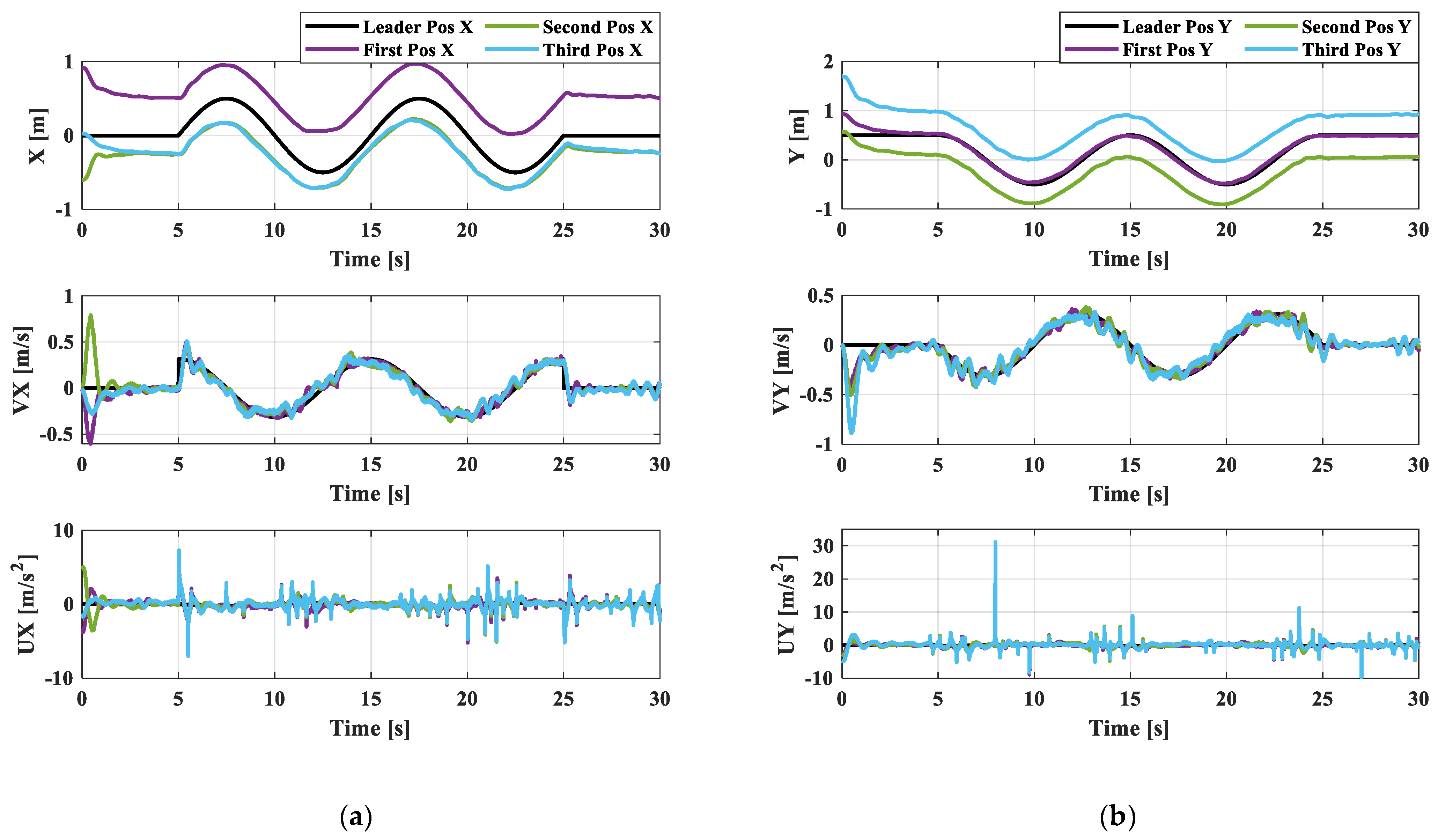
6.2.1. Case 1: Straight Line
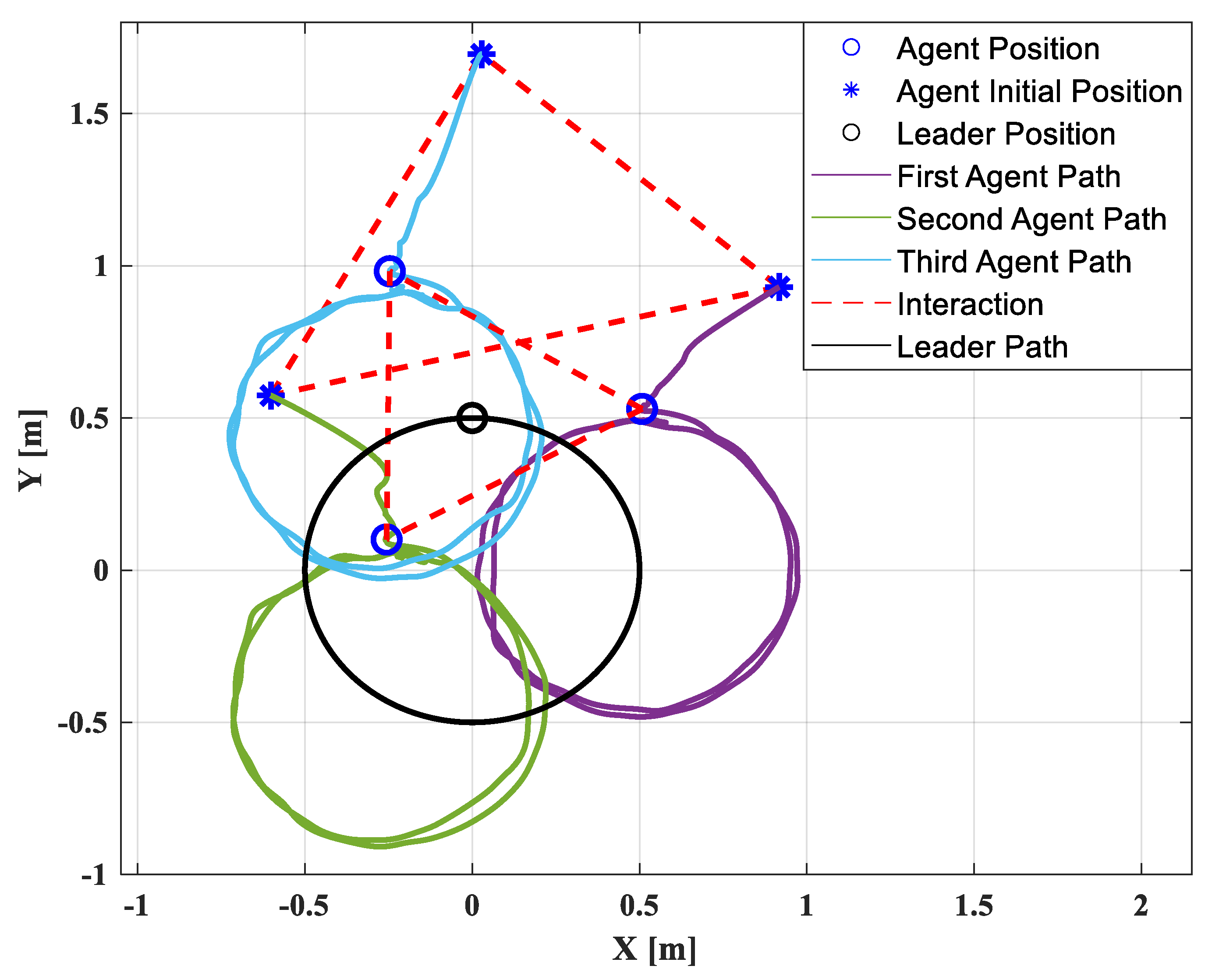
6.2.2. Case 2: Circular Trajectory
6.2.3. Case 3: Formation with External Disturbances
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, H.; Cheng, Z.; Chen, G.; Li, C. Model predictive flocking control for second-order multi-agent systems with input constraints. IEEE Trans. Circuits Syst. I Regul. Pap. 2015, 62, 1599–1606. [Google Scholar] [CrossRef]
- Fang, H.; Wei, Y.; Chen, J.; Xin, B. Flocking of Second-Order Multiagent Systems with Connectivity Preservation Based on Algebraic Connectivity Estimation. IEEE Trans. Cybern. 2016, 47, 1067–1077. [Google Scholar] [CrossRef] [PubMed]
- Luo, X.; Li, S.; Guan, X. Flocking algorithm with multi-target tracking for multi-agent systems. Pattern Recognit. Lett. 2010, 31, 800–805. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Wen, G.; Liu, Y.; Wang, F. Adaptive Consensus Control for a Class of Nonlinear Multiagent Time-Delay Systems Using Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1217–1226. [Google Scholar] [CrossRef]
- Nguyen, T.N.; Hien, T.D.; Nguyen-Thoi, T.; Lee, J. A unified adaptive approach for membrane structure: Form finding and large deflection iso-geometric analysis. Comput. Methods Appl. Mech. Eng. 2020, 369, 113239. [Google Scholar] [CrossRef]
- Nguyen, T.N.; Lee, J.; Dinh-Tien, L.; Dang, L.M. Deep learned one-iteration nonlinear solver for solid mechanics. Int. J. Numer. Methods Eng. 2022, 123, 1841–1860. [Google Scholar] [CrossRef]
- Duan, H.; Liu, S. Non-linear dual-mode receding horizon control for multiple unmanned air vehicles formation flight based on chaotic particle swarm optimization. IET Control Theory Appl. 2010, 4, 2565–2578. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.; Yang, T.; Zhou, L.; Yuan, Y.; Feng, H. Maritime Search and Rescue Networking Based on Multi-Agent Cooperative Communication. J. Commun. Inf. Netw. 2019, 4, 42–53. [Google Scholar] [CrossRef]
- Jennings, J.S.; Whelan, G.; Evans, W.F. Cooperative search and rescue with a team of mobile robots. In Proceedings of the 1997 8th International Conference on Advanced Robotics. Proceedings, ICAR’97, Monterey, CA, USA, 7–9 July 1997; pp. 193–200. [Google Scholar]
- Wang, W.; Huang, J.; Wen, C.; Fan, H. Distributed adaptive control for consensus tracking with application to formation control of nonholonomic mobile robots. Automatica 2014, 50, 1254–1263. [Google Scholar] [CrossRef]
- Mao, J.; Karimi, H.R.; Xiang, Z. Observer-based adaptive consensus for a class of nonlinear multiagent systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1893–1900. [Google Scholar] [CrossRef]
- Do, K.D. Formation tracking control of unicycle-type mobile robots with limited sensing ranges. IEEE Trans. Control Syst. Technol. 2008, 16, 527–538. [Google Scholar] [CrossRef] [Green Version]
- Sanhoury, I.M.; Amin, S.H.; Husain, A.R. Formation control of multiple mobile robots utilizing synchronization approach. Int. J. Mechatron. Manuf. Syst. 2013, 6, 94–114. [Google Scholar]
- Chen, L.; Li, C.; Sun, Y.; Ma, G. Cooperative impulsive formation control for networked uncertain euler-lagrange systems with communication delays. Chin. Phys. B 2017, 26, 068703. [Google Scholar] [CrossRef]
- Chen, L.; Li, C.; Xiao, B.; Guo, Y. Formation-containment control of networked euler-lagrange systems: An event-triggered framework. ISA Trans. 2019, 86, 87–97. [Google Scholar] [CrossRef]
- Yoo, S.J.; Kim, T.H. Distributed formation tracking of networked mobile robots under unknown slippage effects. Automatica 2015, 54, 100–106. [Google Scholar] [CrossRef]
- Cui, R.; Ren, B.; Ge, S. Synchronized tracking control of multi-agent system with high order dynamics. IET Control. Theory Appl. 2012, 6, 603–614. [Google Scholar] [CrossRef] [Green Version]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Franceschelli, M.; Pisano, A.; Giua, A.; Usai, E. Finite-time consensus with disturbance rejection by discontinuous local interactions in directed graphs. IEEE Trans. Autom. Control 2015, 60, 1133–1138. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, J.; Li, B.; Yang, Y. Finitetime formation tracking control for quadrotor UAVs based on fast non-singular terminal sliding mode. In Proceedings of the 2018 International Symposium in Sensing and Instrumentation in IoT Era (ISSI), Shanghai, China, 6–7 September 2018. [Google Scholar]
- Liu, H.; Cheng, L.; Tan, M.; Wang, Y. Consensus tracking of general linear multi-agent systems: Fast sliding-mode algorithms. In Proceedings of the IEEE 2013 32nd Chinese Control Conference (CCC), Xi’an, China, 26–28 July 2013; pp. 7302–7307. [Google Scholar]
- Nazarova, A.V.; Zhai, M. Distributed solution of problems in multi agent robotic systems. In Smart Electromechanical Systems; Springer: Cham, Switzerland, 2019; pp. 107–124. [Google Scholar]
- Tang, Y.; Xing, X.; Karimi, H.R.; Kocarev, L.; Kurths, J. Tracking control of networked multi-agent systems under new characterizations of impulses and its applications in robotic systems. IEEE Trans. Ind. Electron. 2015, 63, 1299–1307. [Google Scholar] [CrossRef]
- Li, B.; Qin, K.; Xiao, B.; Yang, Y. Finite-time extended state observer based fault tolerant output feedback control for attitude stabilization. ISA Trans. 2019, 91, 11–20. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Hu, Q.; Yang, Y. Continuous finite-time extended state observer based fault tolerant control for attitude stabilization. Aerosp. Sci. Technol. 2019, 89, 204–213. [Google Scholar] [CrossRef]
- Xiao, B.; Yang, X.; Huo, X. A novel disturbance estimation scheme for formation control of ocean surface vessels. IEEE Trans. Ind. Electron. 2016, 64, 4994–5003. [Google Scholar] [CrossRef]
- Lazim, I.M.; Husain, A.R.; Mohamed, Z.; Basri, M.A.M.; Adilla, N. Disturbance observer-based formation tracking control of multiple quadrotors in the presence of disturbances. Trans. Inst. Meas. Control. 2019, 41, 4129–4141. [Google Scholar] [CrossRef]
- Chen, B.; Hu, J.; Zhao, Y.; Ghosh, B.K. Finite-time velocity-free observer-based consensus tracking for heterogeneous uncertain AUVs via adaptive sliding mode control. Ocean. Eng. 2021, 237, 109565. [Google Scholar] [CrossRef]
- Chen, B.; Hu, J.; Zhao, Y.; Ghosh, B.K. Finite-time velocity-free rendezvous control of multiple AUV systems with intermittent communication. IEEE Trans. Syst. Man Cybern. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Chen, B.; Hu, J.; Zhao, Y.; Ghosh, B.K. Finite-time observer-based tracking control of uncertain heterogeneous underwater vehicles using adaptive sliding mode approach. Neurocomputing 2022, 481, 322–332. [Google Scholar] [CrossRef]
- Peng, Z.; Luo, R.; Hu, J.; Shi, K.; Nguang, S.K.; Ghosh, B.K. Optimal tracking control of nonlinear multiagent systems using internal reinforce Q-learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Wu, Y. Interventional bipartite consensus on coopetition networks with unknown dynamics. J. Frankl. Inst. 2017, 354, 4438–4456. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Shi, P. Command filtered backstepping-based attitude containment control for spacecraft formation. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1278–1287. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Wang, Q.G. Adaptive finite-time containment control of uncertain multiple manipulator systems. IEEE Trans. Cybern. 2022, 52, 556–567. [Google Scholar] [CrossRef]
- Mechalo, O.; Xu, L.; Xie, X.; Iqbal, J. Theory and practice for autonomous formation flight of quadrotors via distributed robust sliding mode control protocol with fixed-time stability guarantee. Control. Eng. Pract. 2022, 123, 105150. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Wan, Y. Data-driven fault-tolerant formation control for nonlinear quadrotors under multiple simultaneous actuator faults. Syst. Control. Lett. 2021, 158, 105063. [Google Scholar] [CrossRef]
- Shojaeim, K. Output-feedback formation control of wheeled mobile robots with actuators saturation compensation. Nonlinear Dyn. 2017, 89, 2867–2878. [Google Scholar] [CrossRef]
- Meng, C.-C.; Zhang, X.-Y. Distributed leaderless formation control for multiple autonomous underwater vehicles based on adaptive nonsingular terminal sliding mode. Appl. Ocean. Res. 2021, 115, 102781. [Google Scholar] [CrossRef]
- Shojaei, K. Neural network formation control of a team of tractor-trailer systems. Robotica 2018, 36, 39–56. [Google Scholar] [CrossRef]
- Wang, J.; Bi, C.; Wang, D.; Kuang, C.W.Q. Finite-time distributed event-triggered formation control for quadrotor UAVs with experimentation. ISA Trans. 2021, 126, 585–596. [Google Scholar] [CrossRef]
- Han, T.; Guan, Z.H.; Liao, R.Q.; Chen, J.; Chi, M.; He, D.X. Distributed finite-time formation control of multi-agent systems via FTSMC approach. IET Control. Theory Appl. 2017, 11, 2585–2590. [Google Scholar] [CrossRef]
- Okyere, E.; Bousbaine, A.; Poyi, G.T.; Joseph, A.K.; Andrade, J.M. LQR controller design for quad-rotor helicopters. J. Eng. 2019, 17, 4003–4007. [Google Scholar] [CrossRef]
- Available online: https://store.bitcraze.io/products/crazyflie-2–1 (accessed on 20 May 2022).



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, N.P.; Park, D.; Ngoc, D.N.; Xuan-Mung, N.; Huynh, T.T.; Nguyen, T.N.; Hong, S.K. Quadrotor Formation Control via Terminal Sliding Mode Approach: Theory and Experiment Results. Drones 2022, 6, 172. https://doi.org/10.3390/drones6070172
Nguyen NP, Park D, Ngoc DN, Xuan-Mung N, Huynh TT, Nguyen TN, Hong SK. Quadrotor Formation Control via Terminal Sliding Mode Approach: Theory and Experiment Results. Drones. 2022; 6(7):172. https://doi.org/10.3390/drones6070172
Chicago/Turabian StyleNguyen, Ngoc Phi, Daewon Park, Dao N. Ngoc, Nguyen Xuan-Mung, Tuan Tu Huynh, Tan N. Nguyen, and Sung Kyung Hong. 2022. "Quadrotor Formation Control via Terminal Sliding Mode Approach: Theory and Experiment Results" Drones 6, no. 7: 172. https://doi.org/10.3390/drones6070172
APA StyleNguyen, N. P., Park, D., Ngoc, D. N., Xuan-Mung, N., Huynh, T. T., Nguyen, T. N., & Hong, S. K. (2022). Quadrotor Formation Control via Terminal Sliding Mode Approach: Theory and Experiment Results. Drones, 6(7), 172. https://doi.org/10.3390/drones6070172