
A ROS Multi-Tier UAV Localization Module Based on GNSS, Inertial and Visual-Depth Data



Abstract
:1. Introduction
2. Materials and Methods
2.1. Components
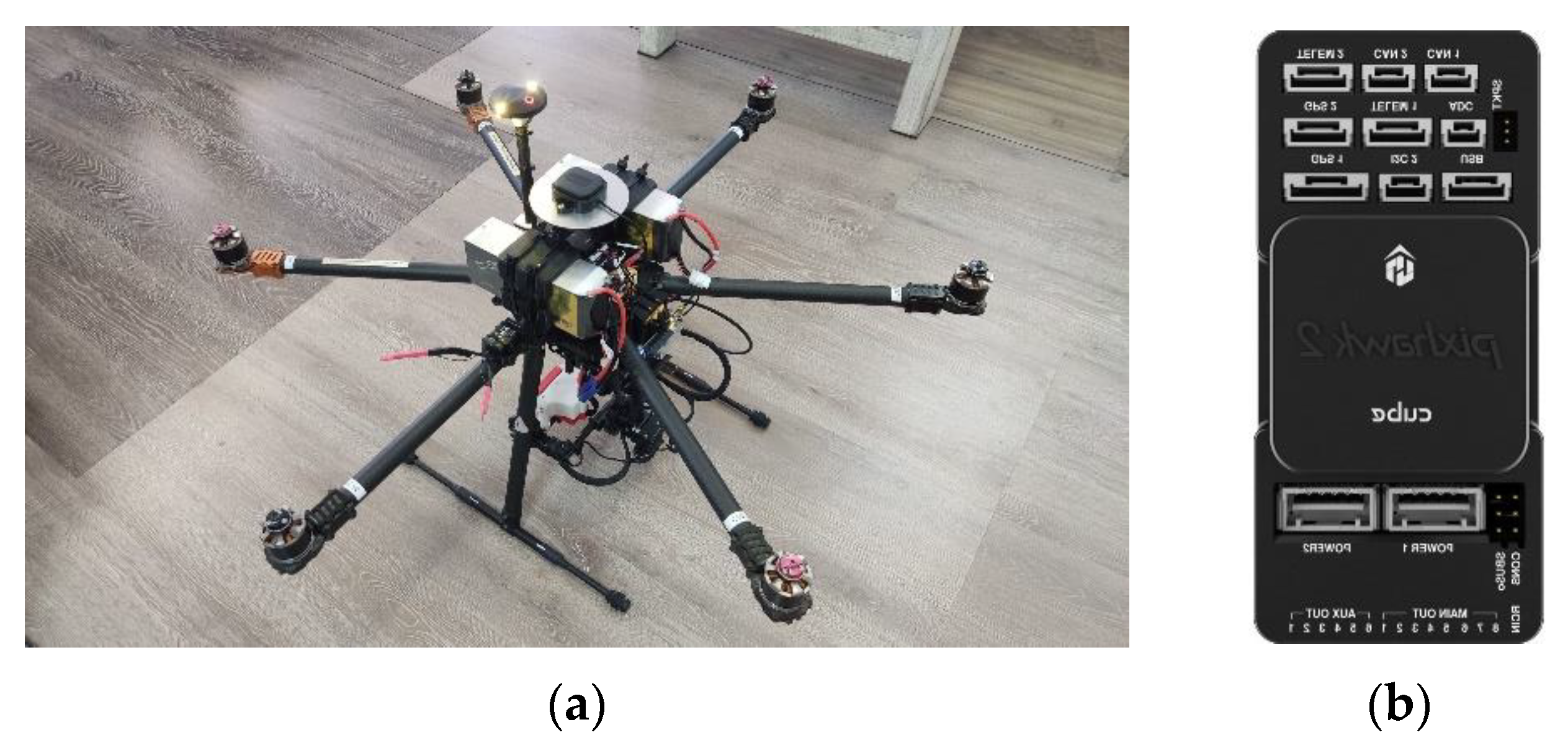
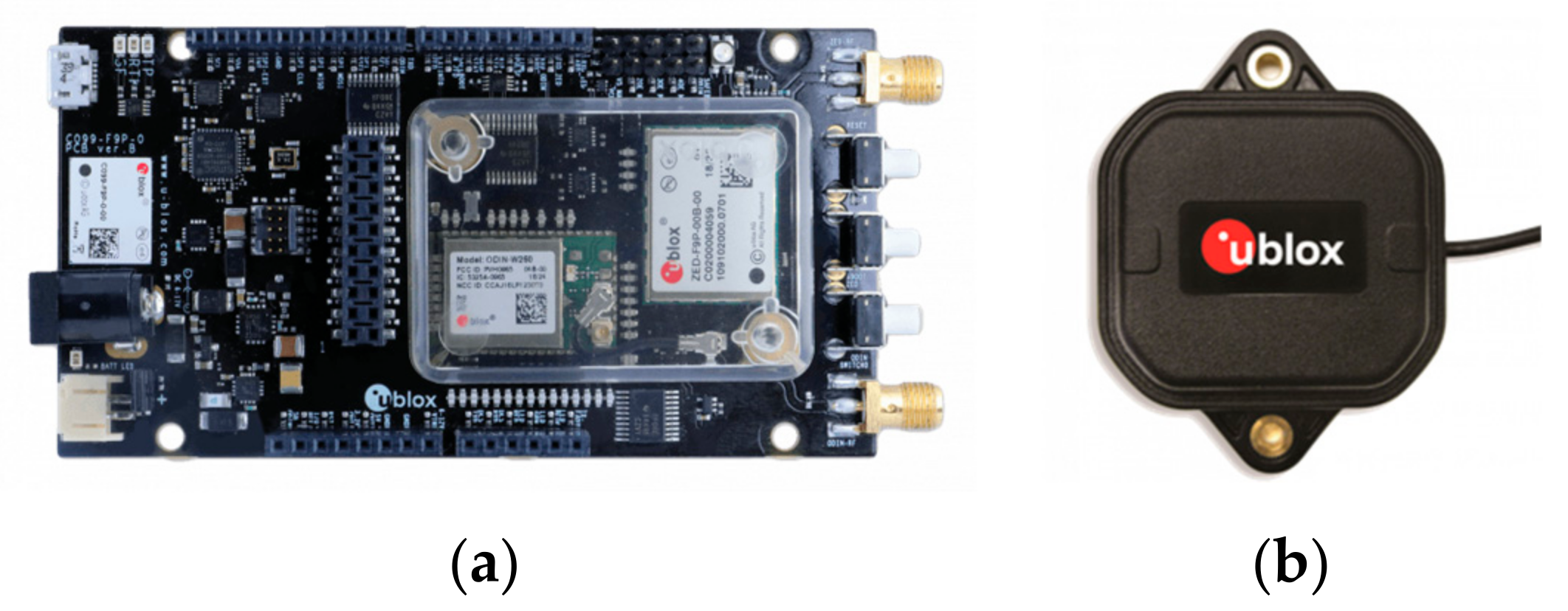
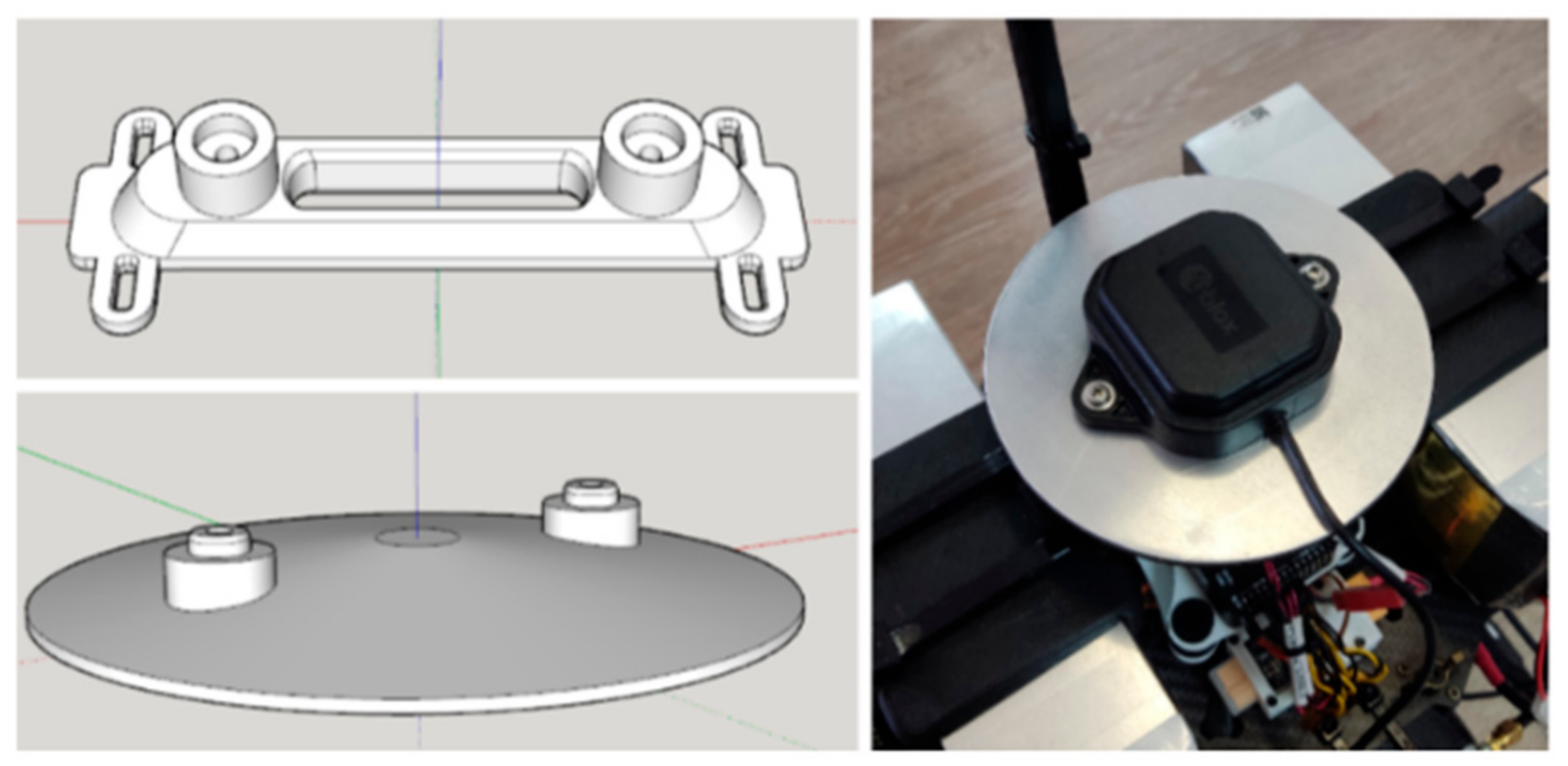
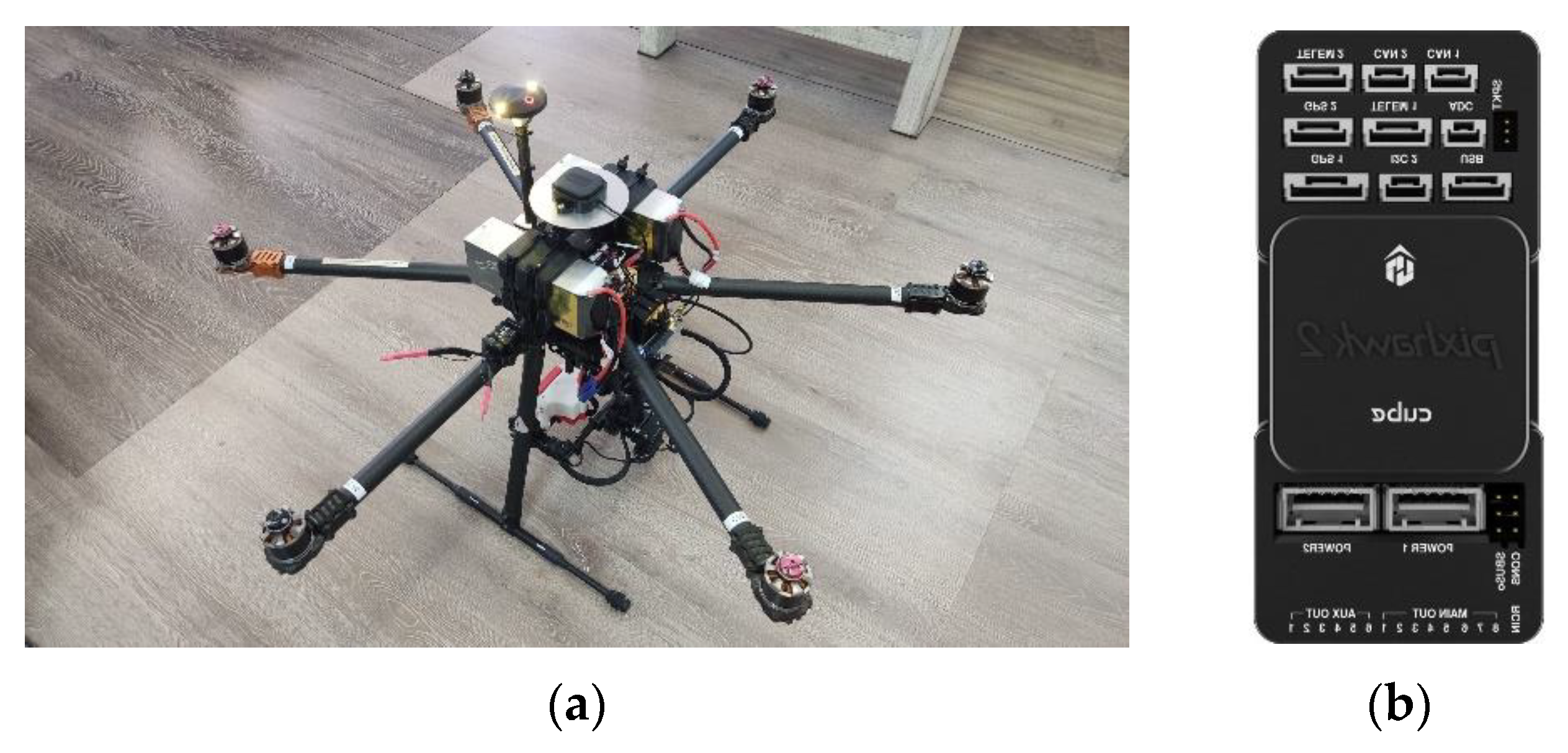
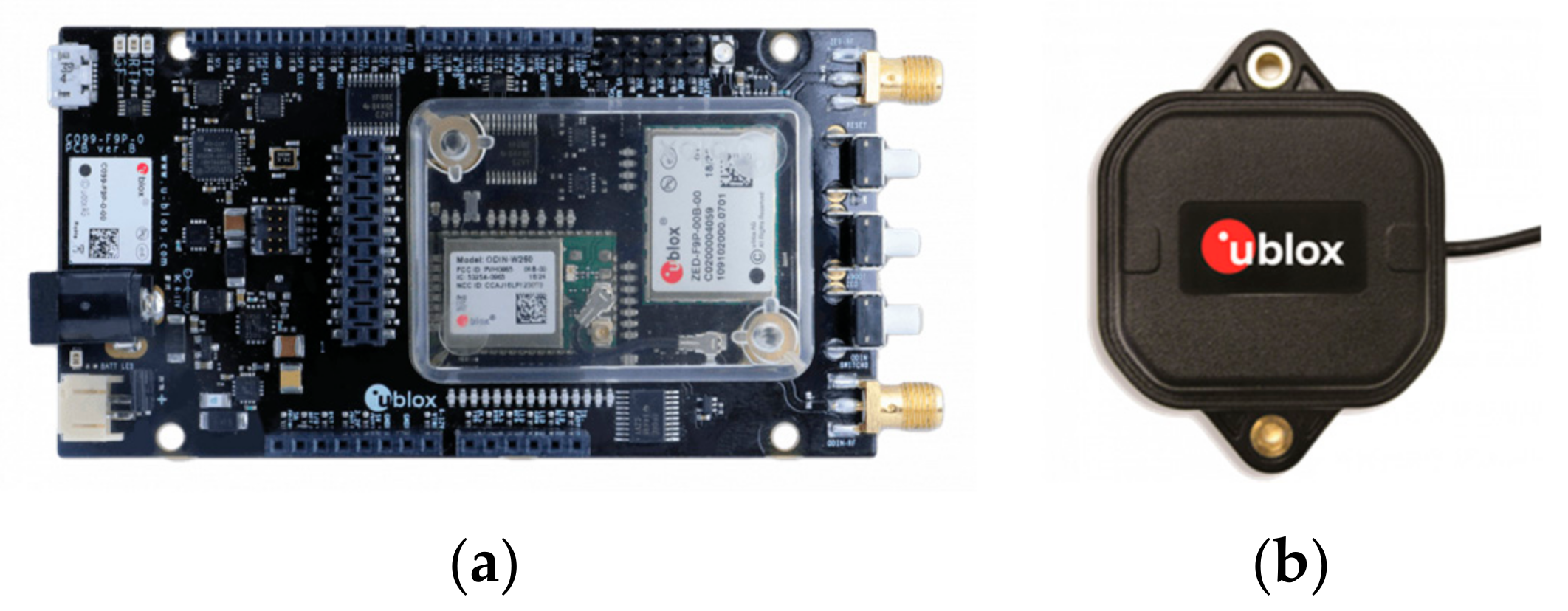
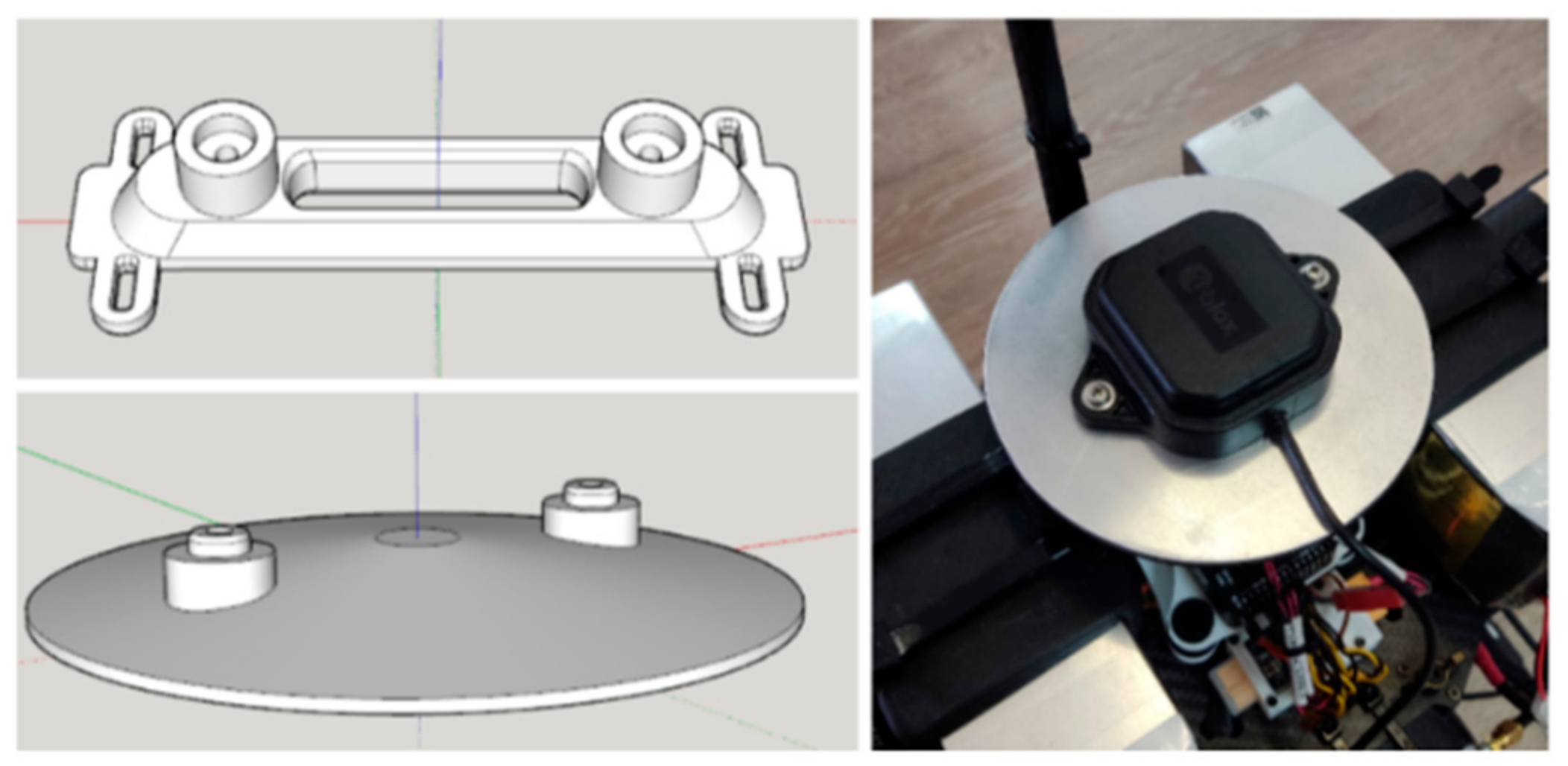
2.1.1. Hardware Components
2.1.2. Robotic Operating System (ROS)
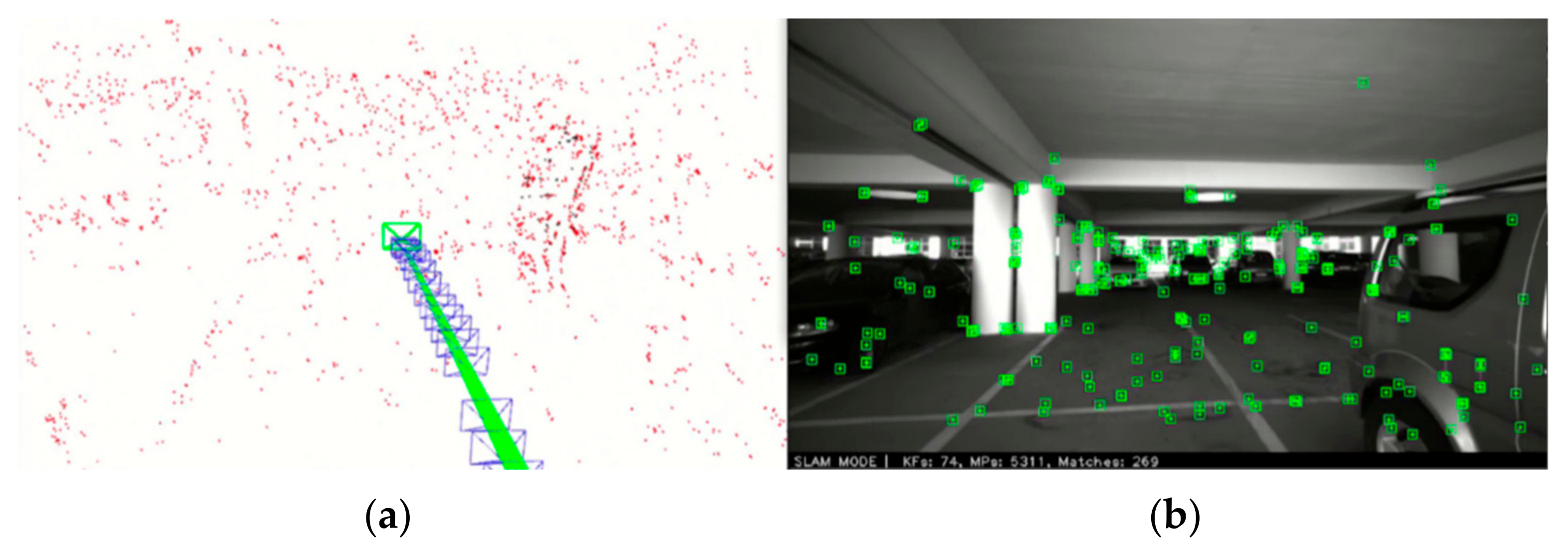
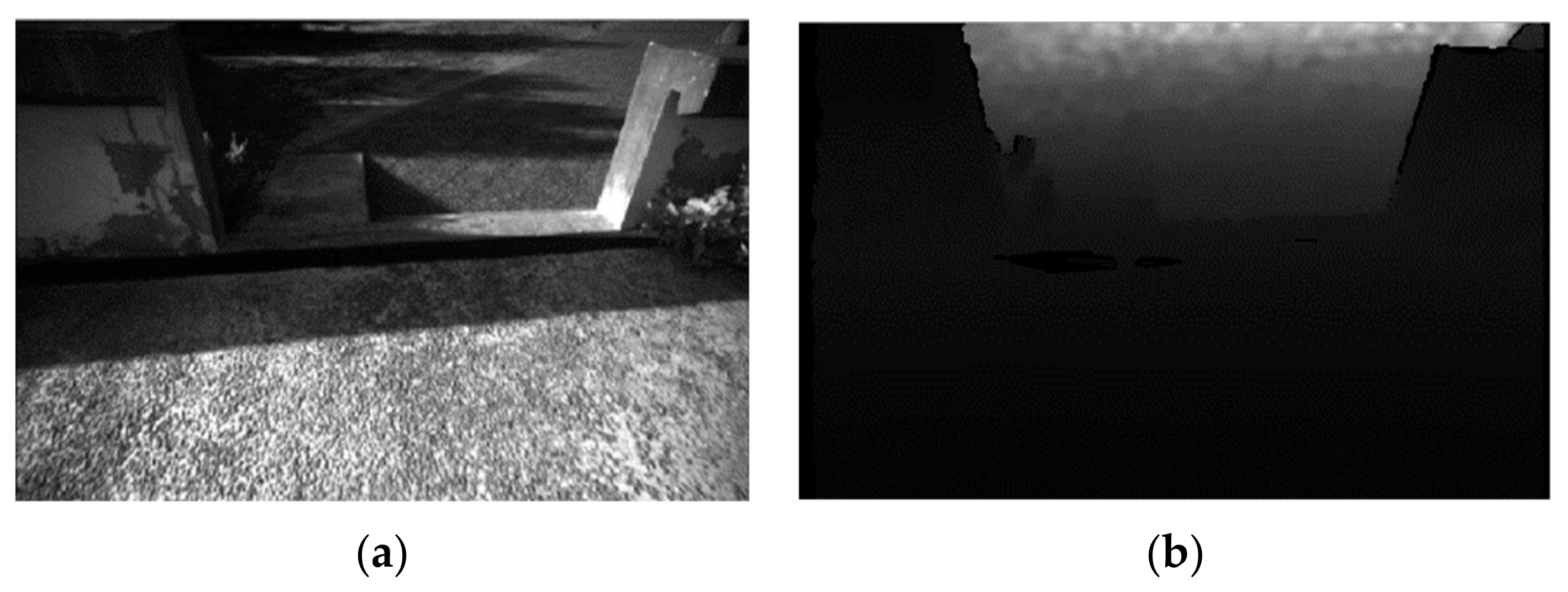
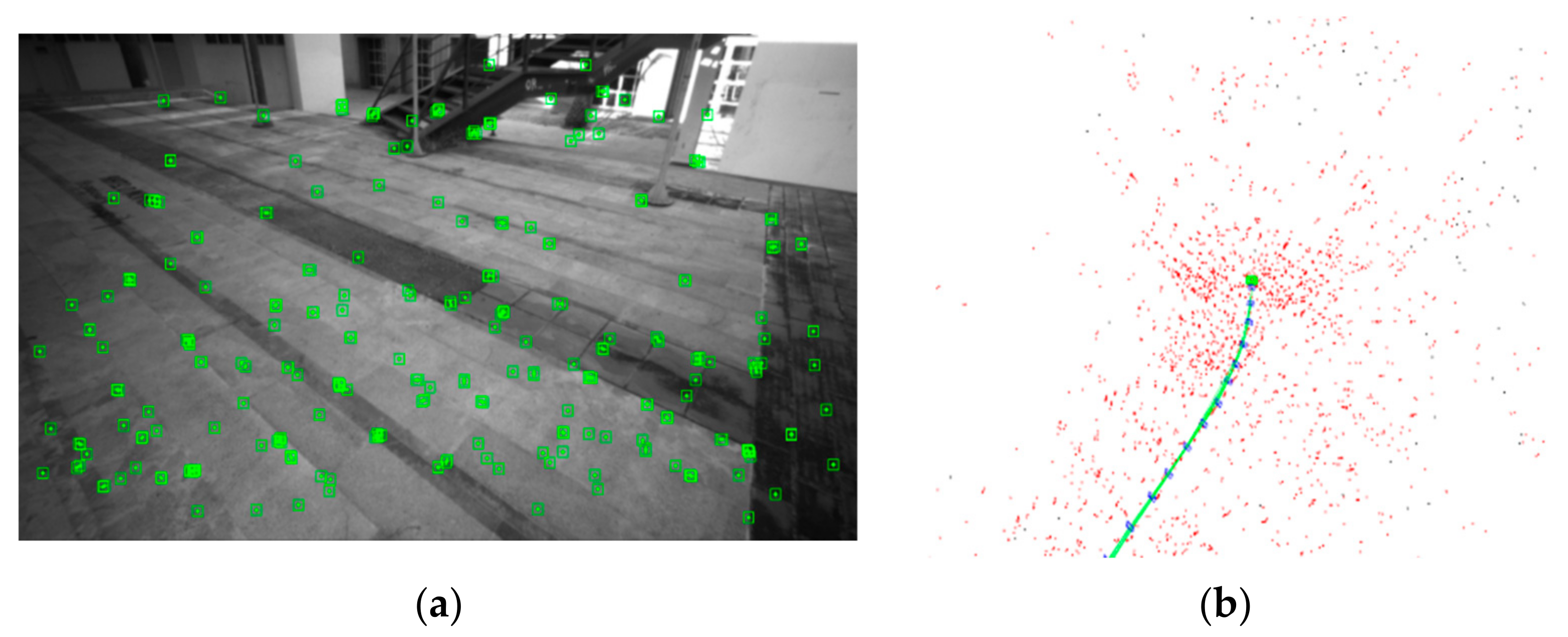
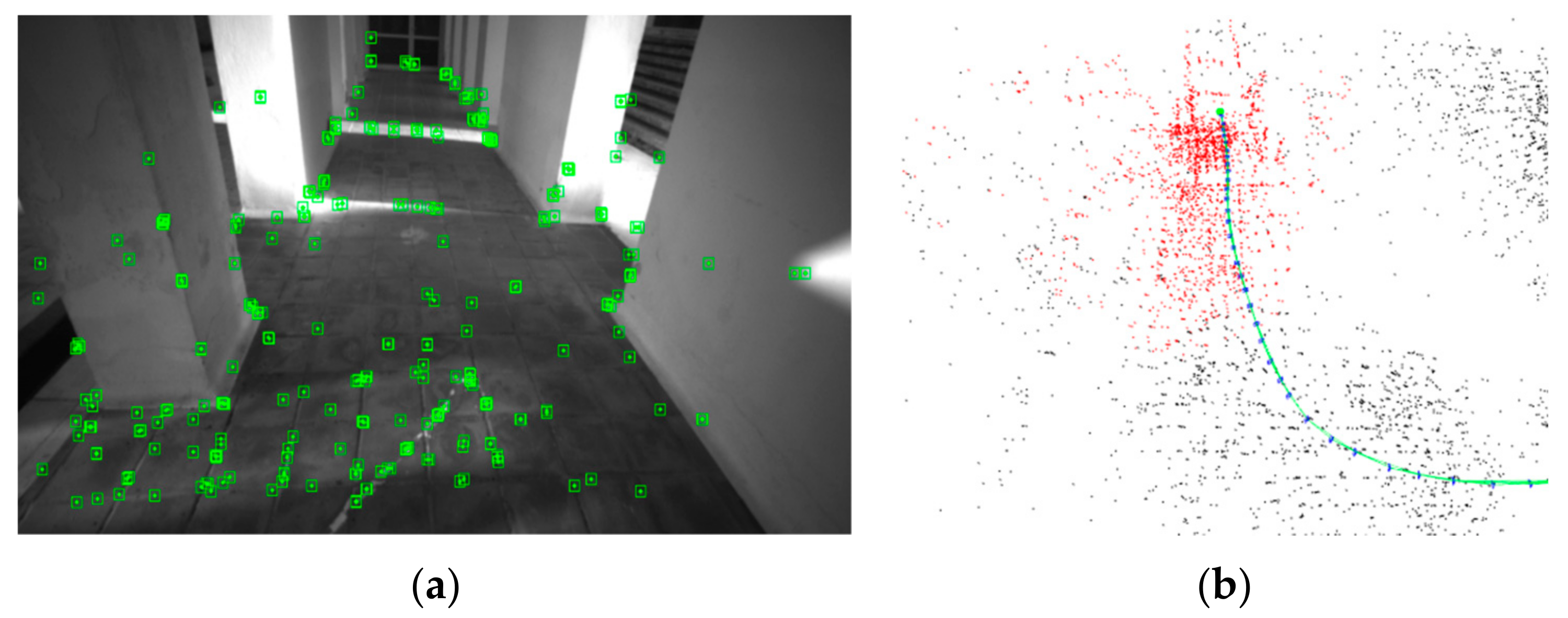
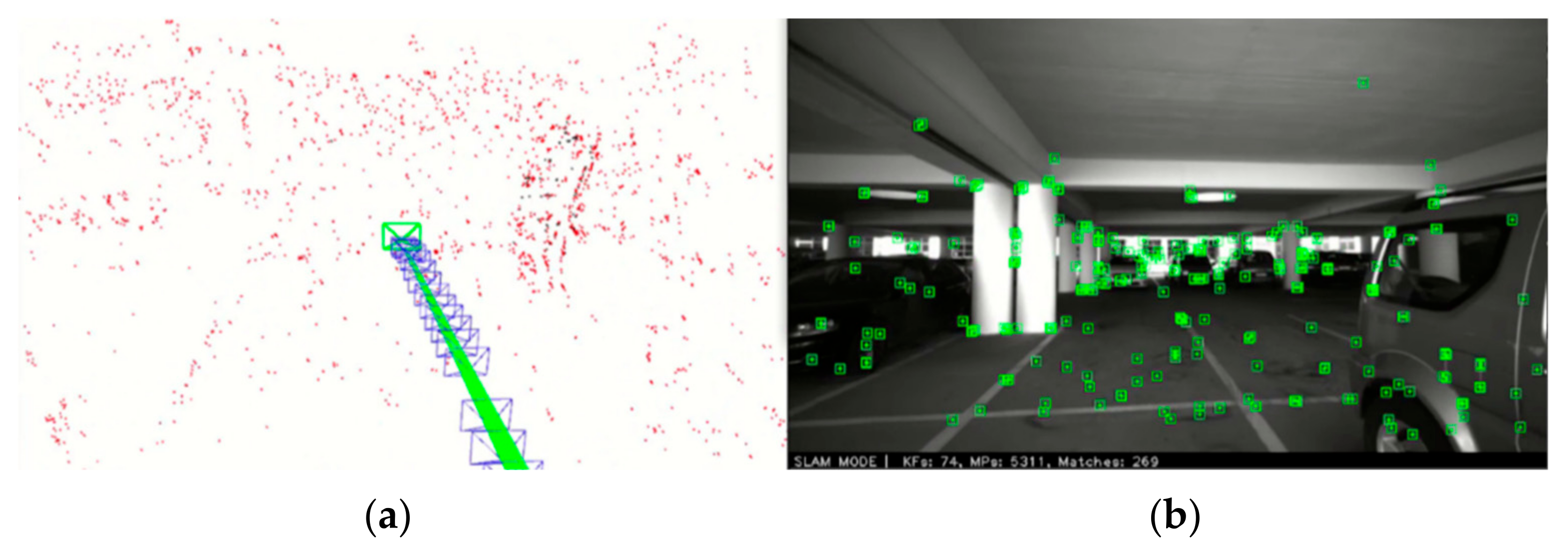
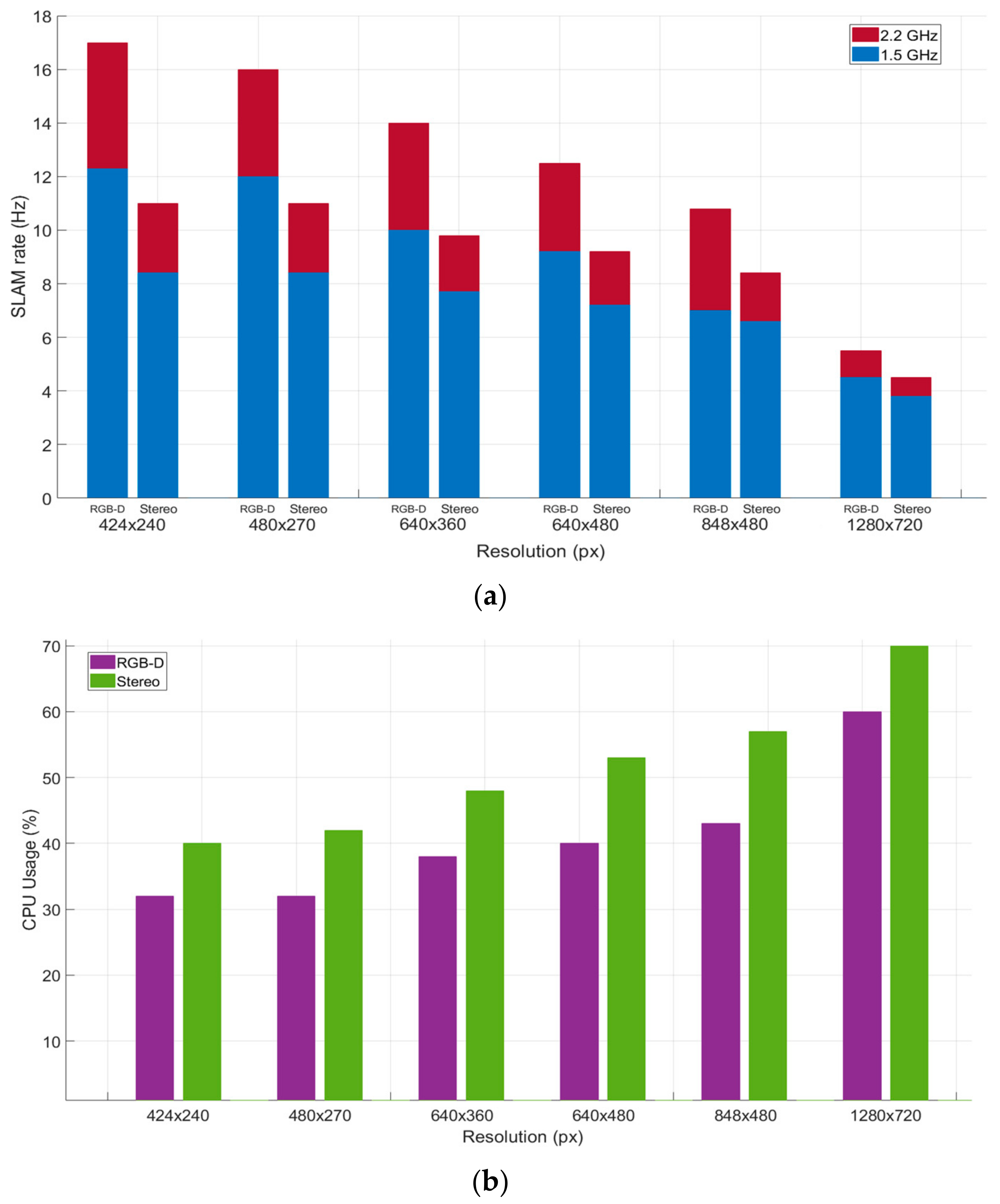
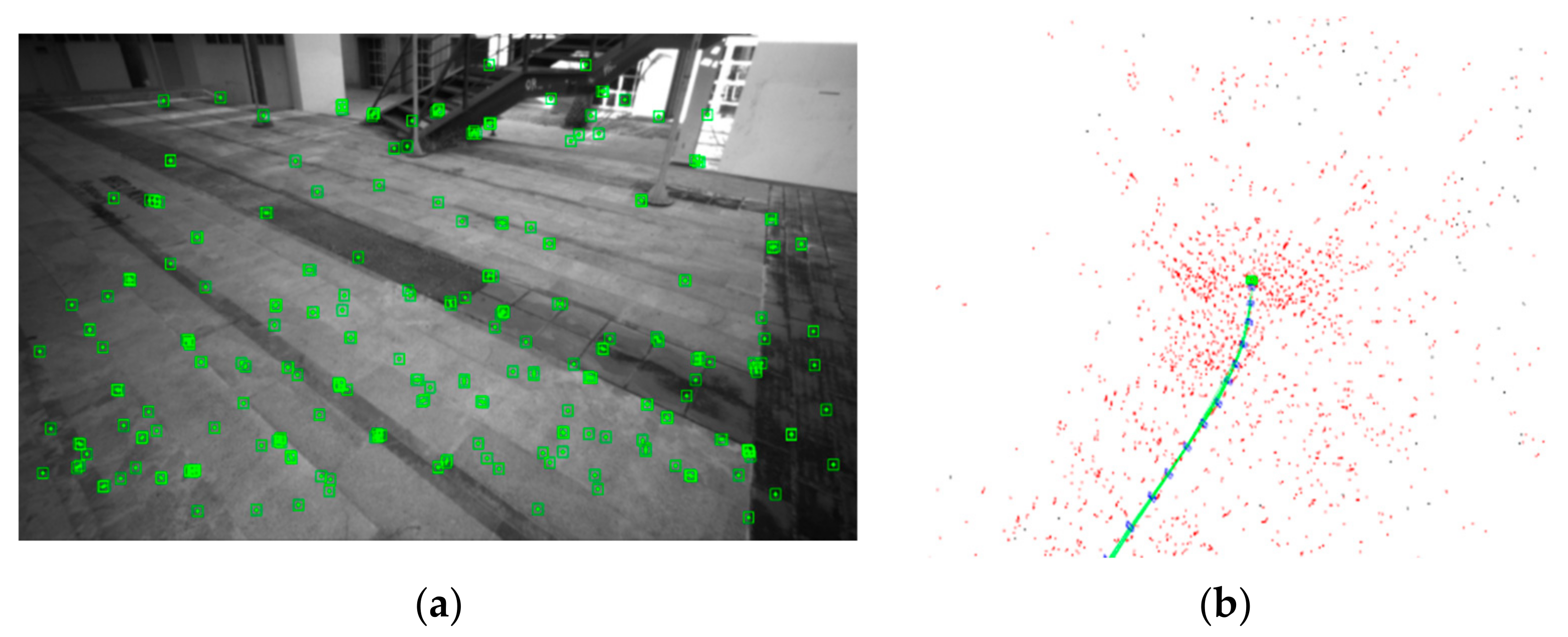
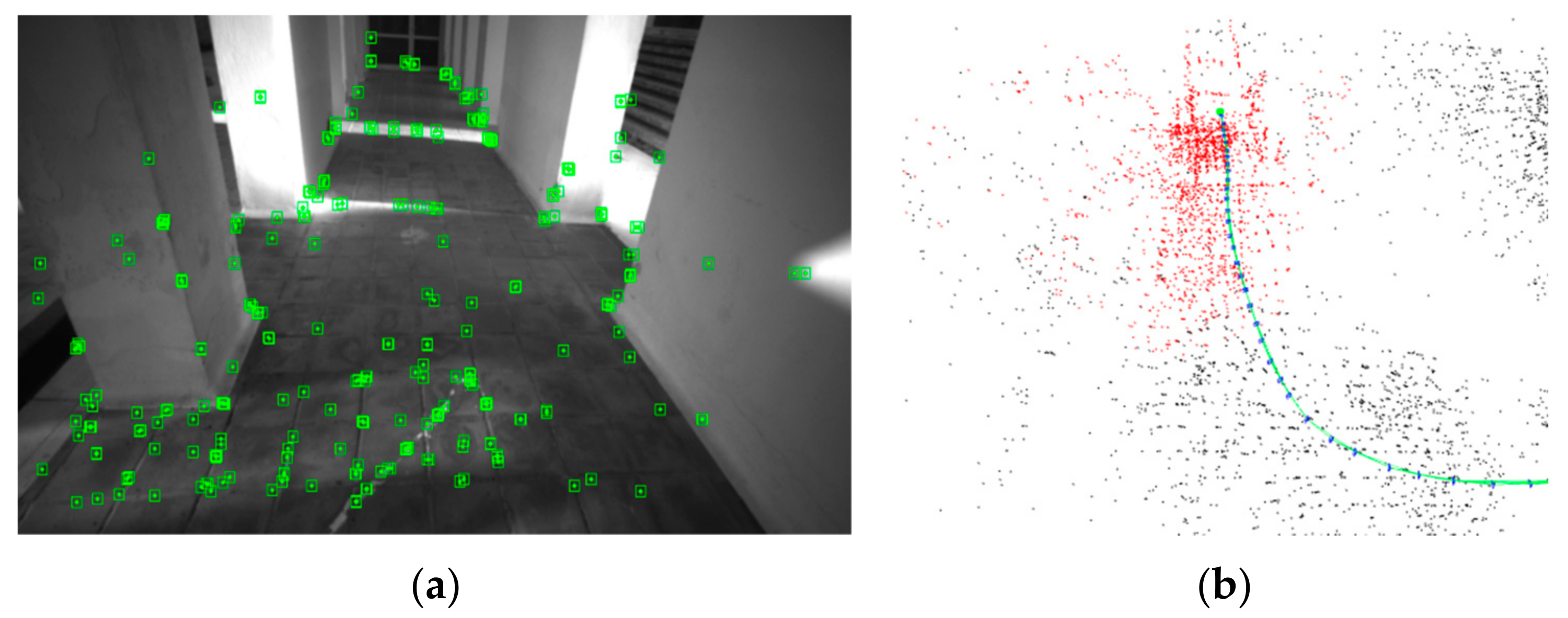
2.1.3. ORB-SLAM2
2.2. Architecture
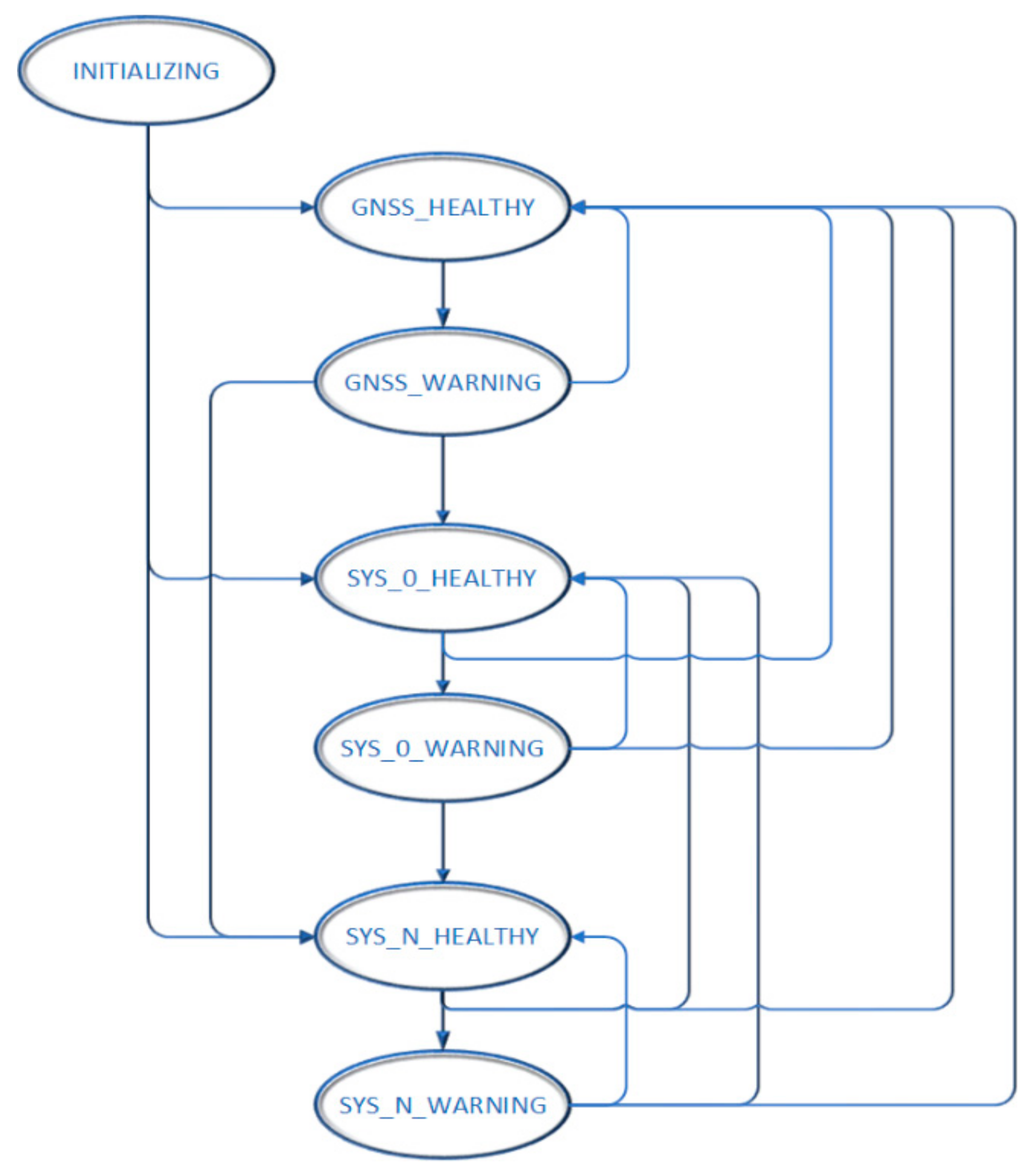
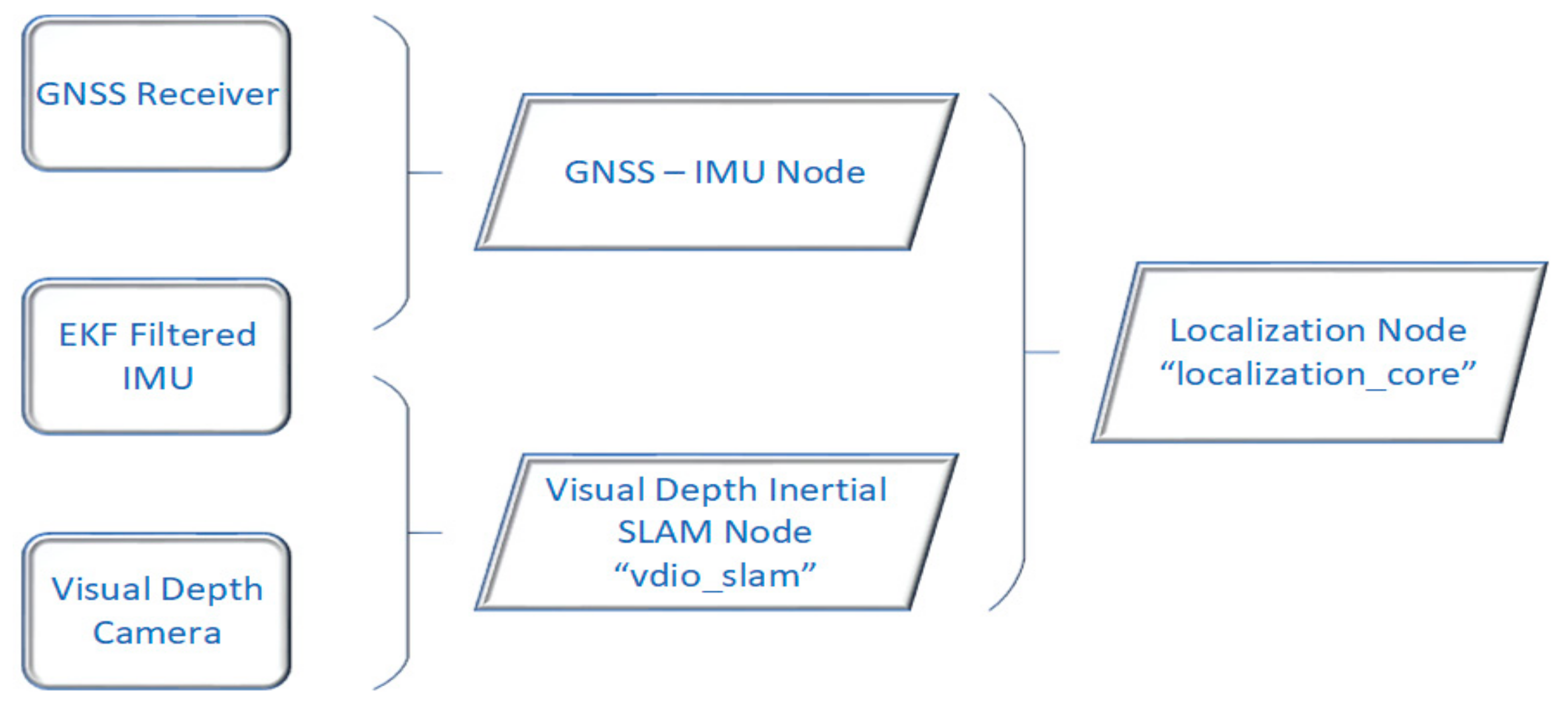
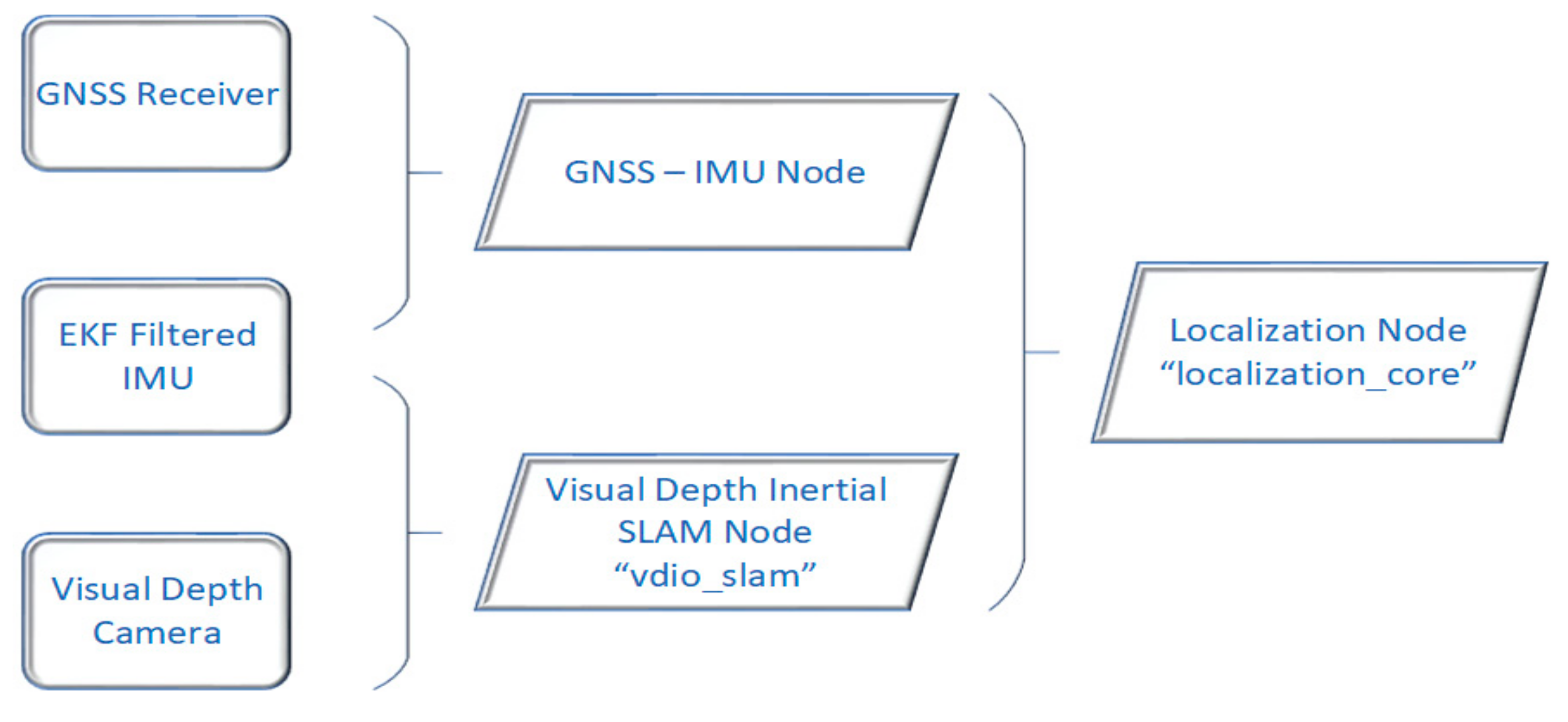
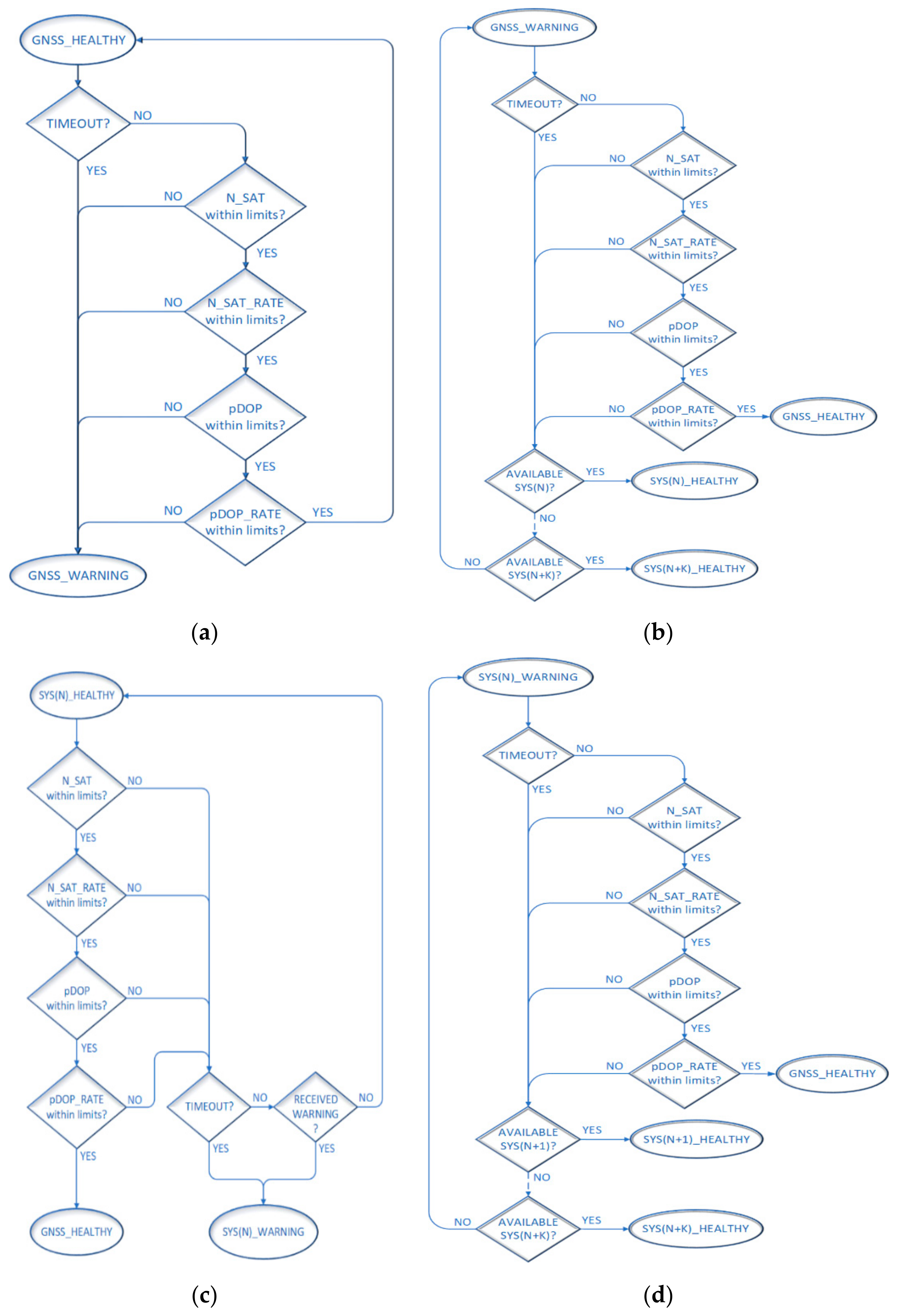
2.2.1. Architecture—The Localization_Core ROS Node
- GNSS HEALTHY: GNSS provides reliable data
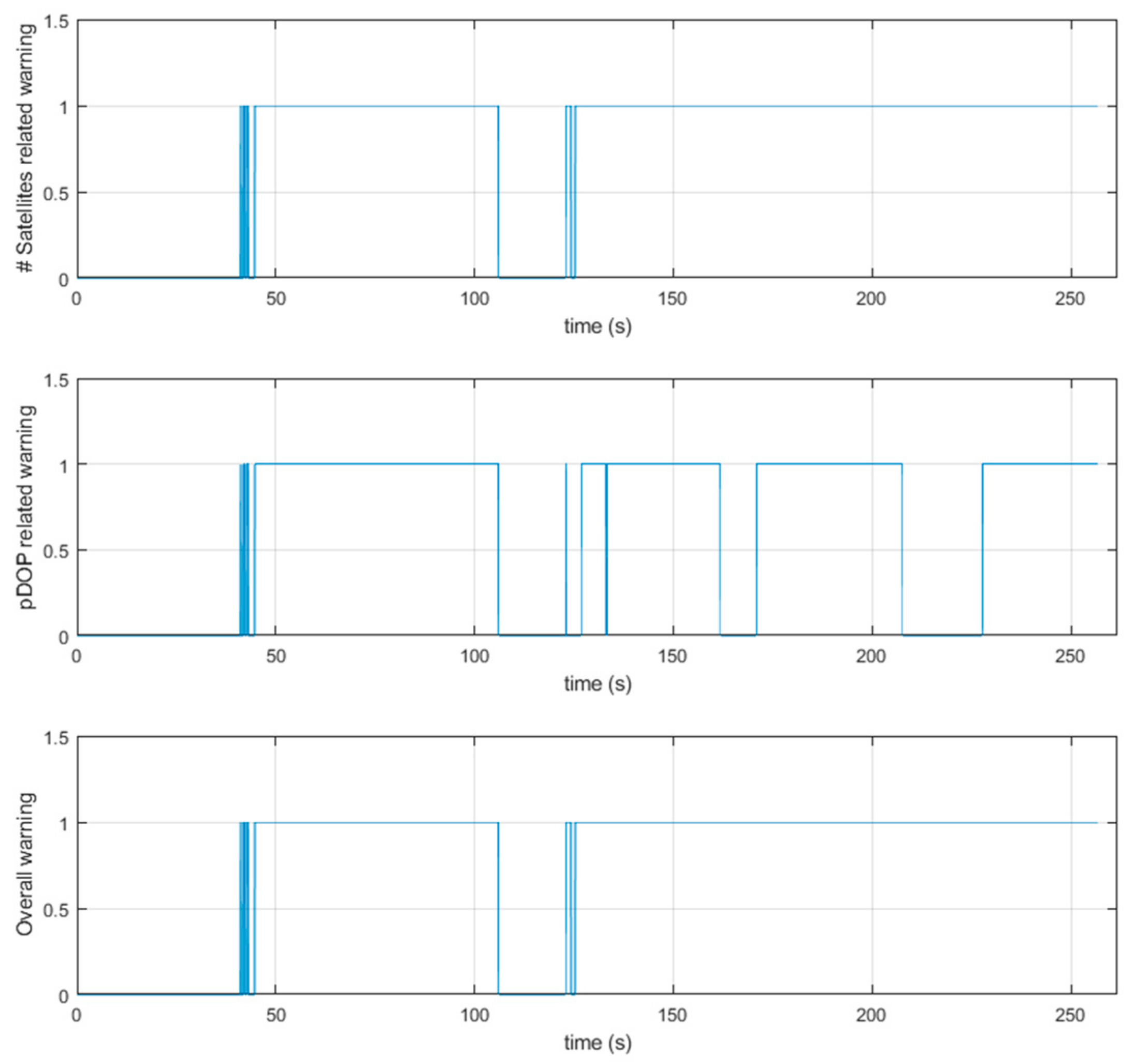
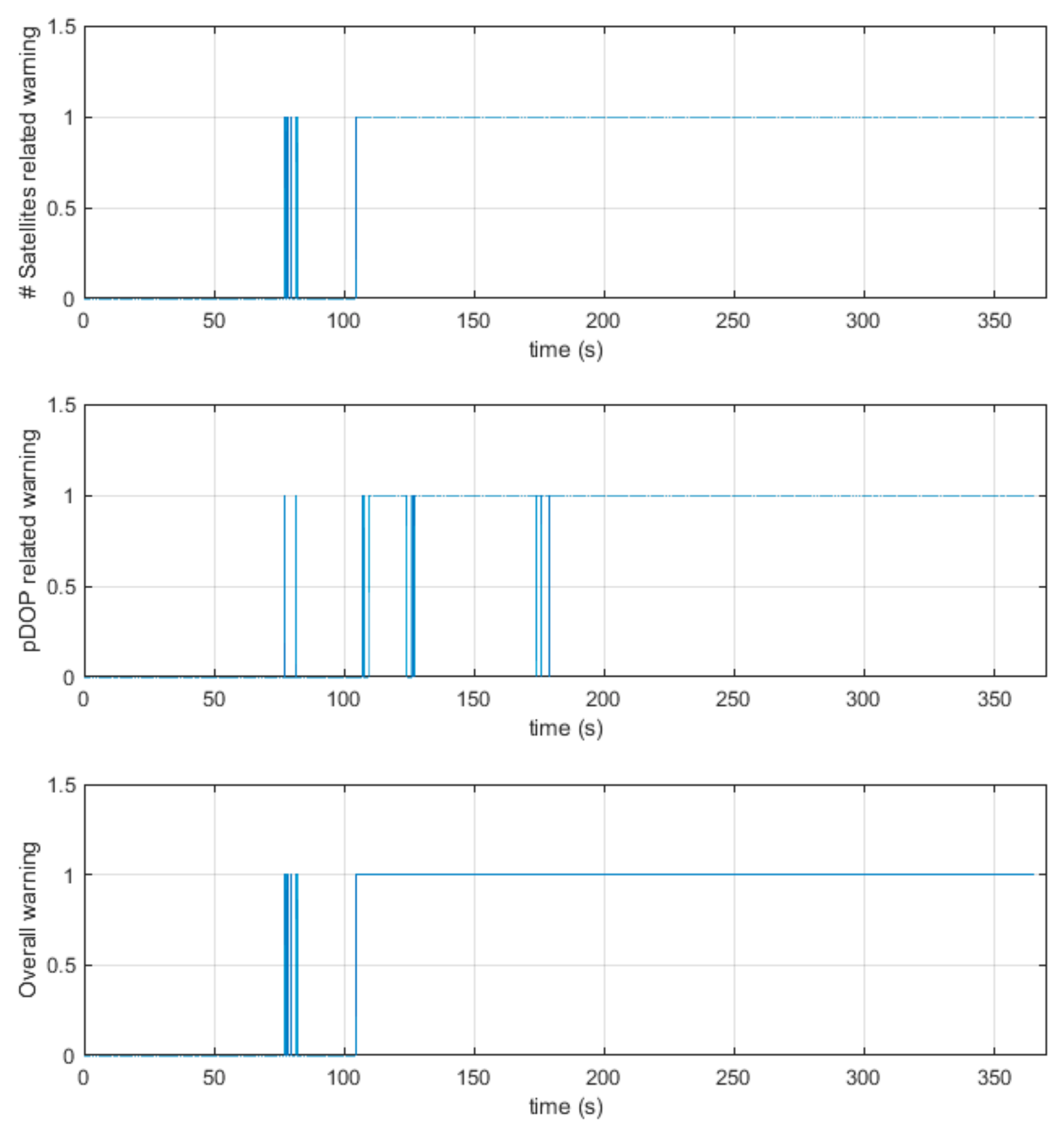
- GNSS WARNING: GNSS provides unreliable data
- SYS_0 HEALTHY: SYS_0 provides reliable data
- SYS_0 WARNING: SYS_0 provides unreliable data
- SYS_N HEALTHY: SYS_N provides reliable data
- SYS_N WARNING: SYS_N provides unreliable data
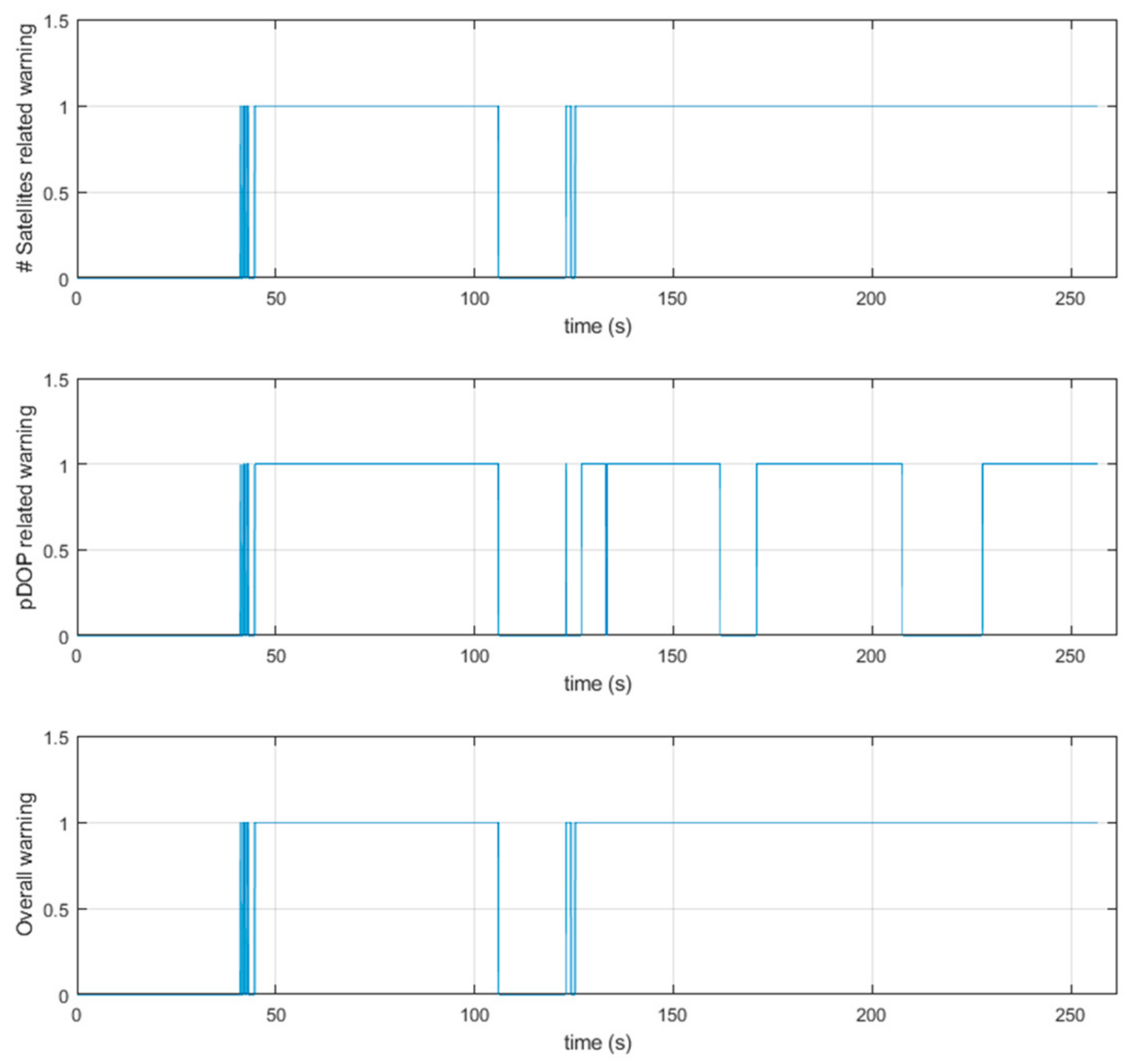
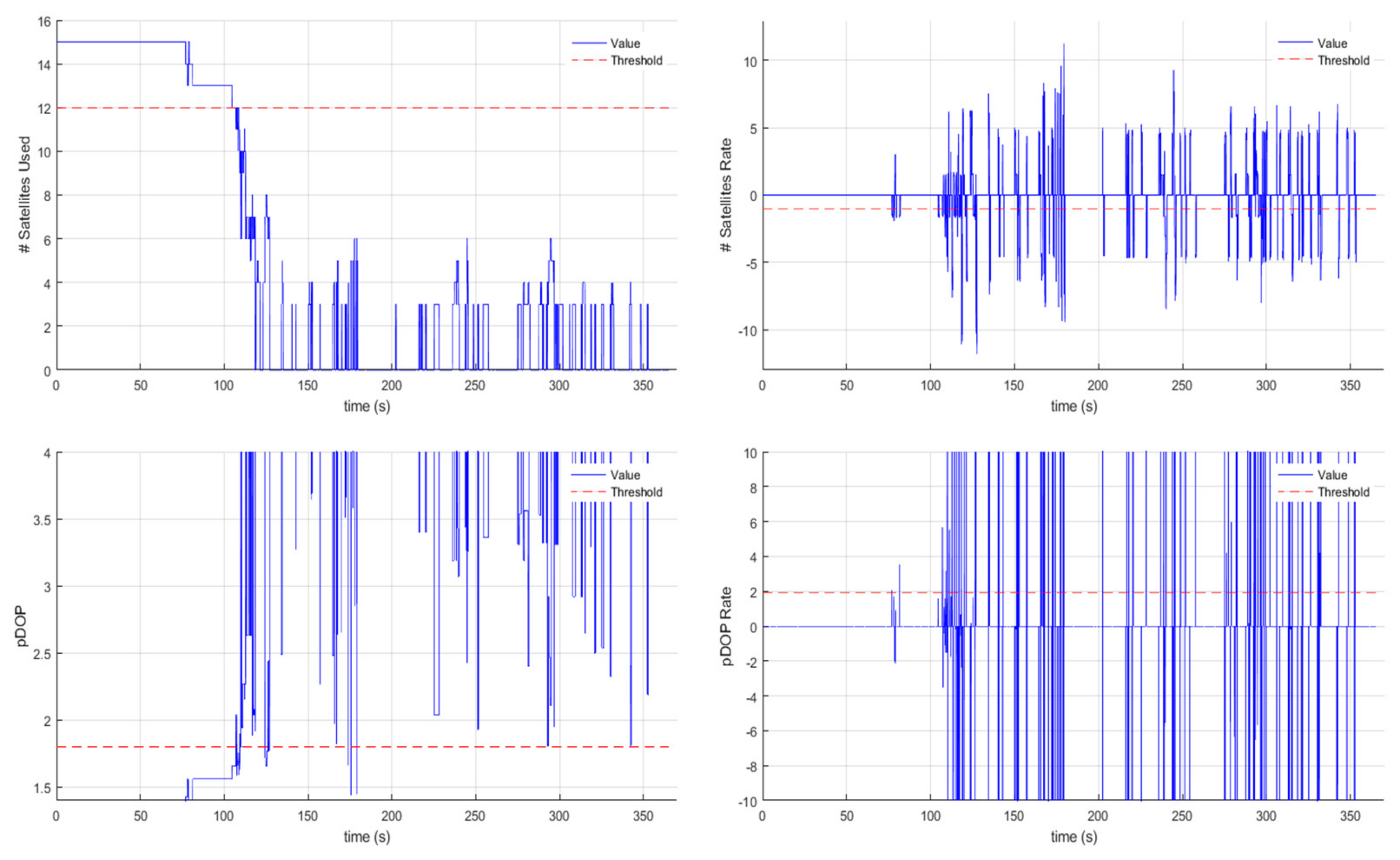
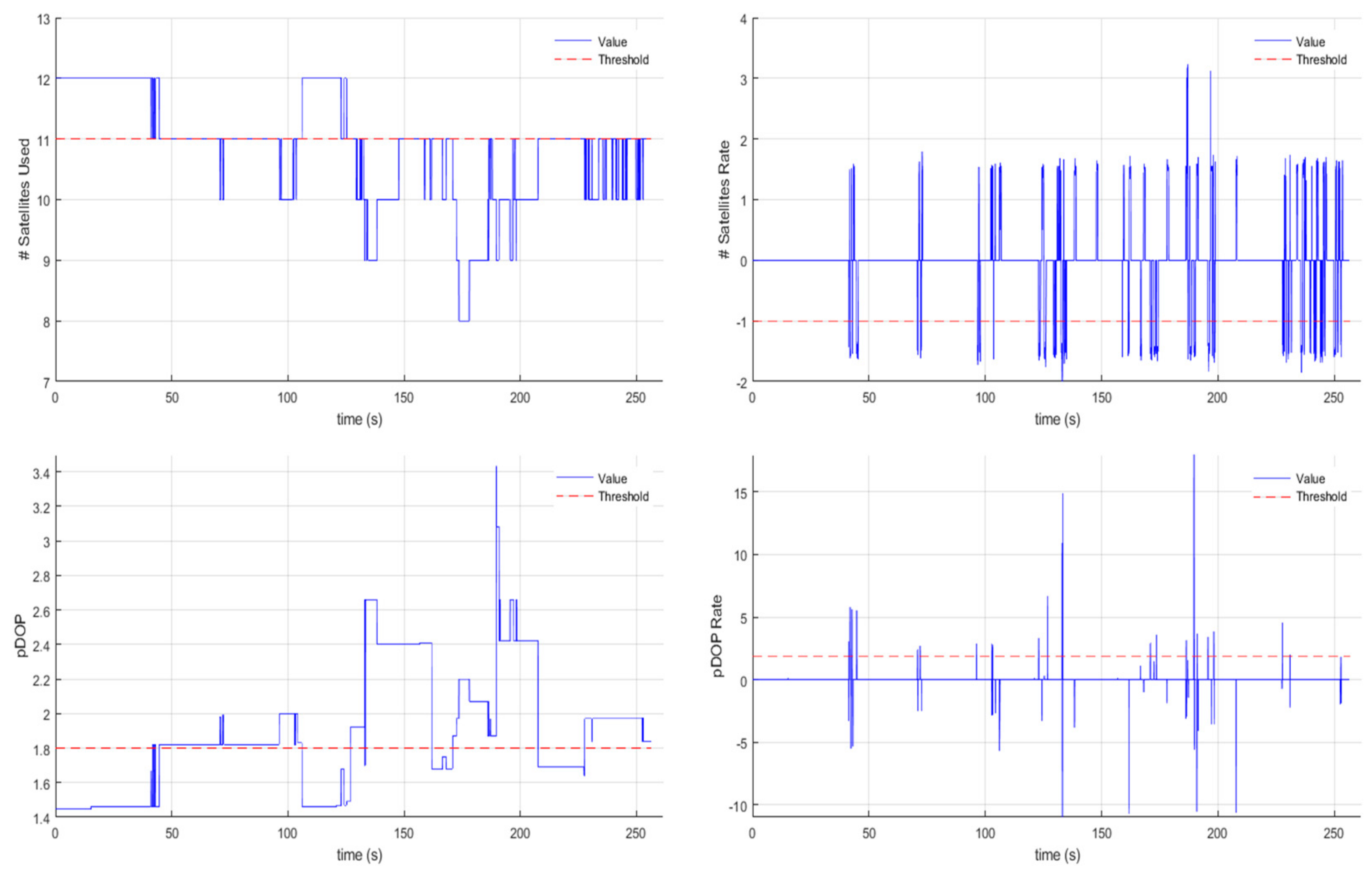
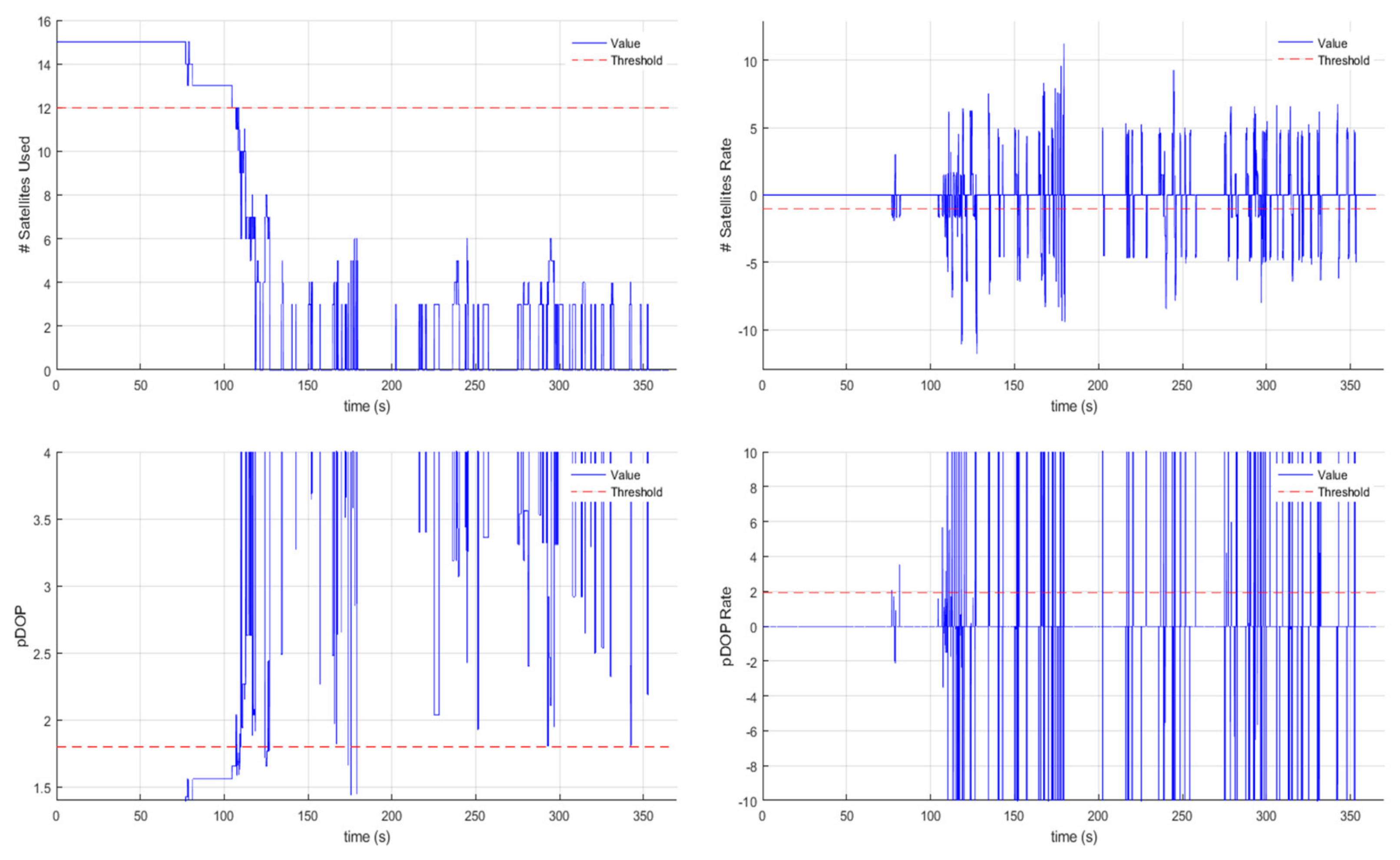
- Minimum satellites count: The minimum number of satellites which are considered acceptable for positioning regarding a specific flight.
- Minimum satellite count drop rate: This value indicates the satellite count drop rate, which triggers the GNSS_WARNING state.
- Maximum pDOP: The maximum pDOP value which is considered tolerable regarding a specific flight.
- Minimum pDOP increase rate: This value indicates the pDOP increase rate, which triggers the GNSS_WARNING state.
- IMU/GNSS/(other localization source, e.g., vdio_slam) timeout: The amount of time in milliseconds which triggers a timeout event, indicating that a module has become unresponsive. Each module can be configured individually.

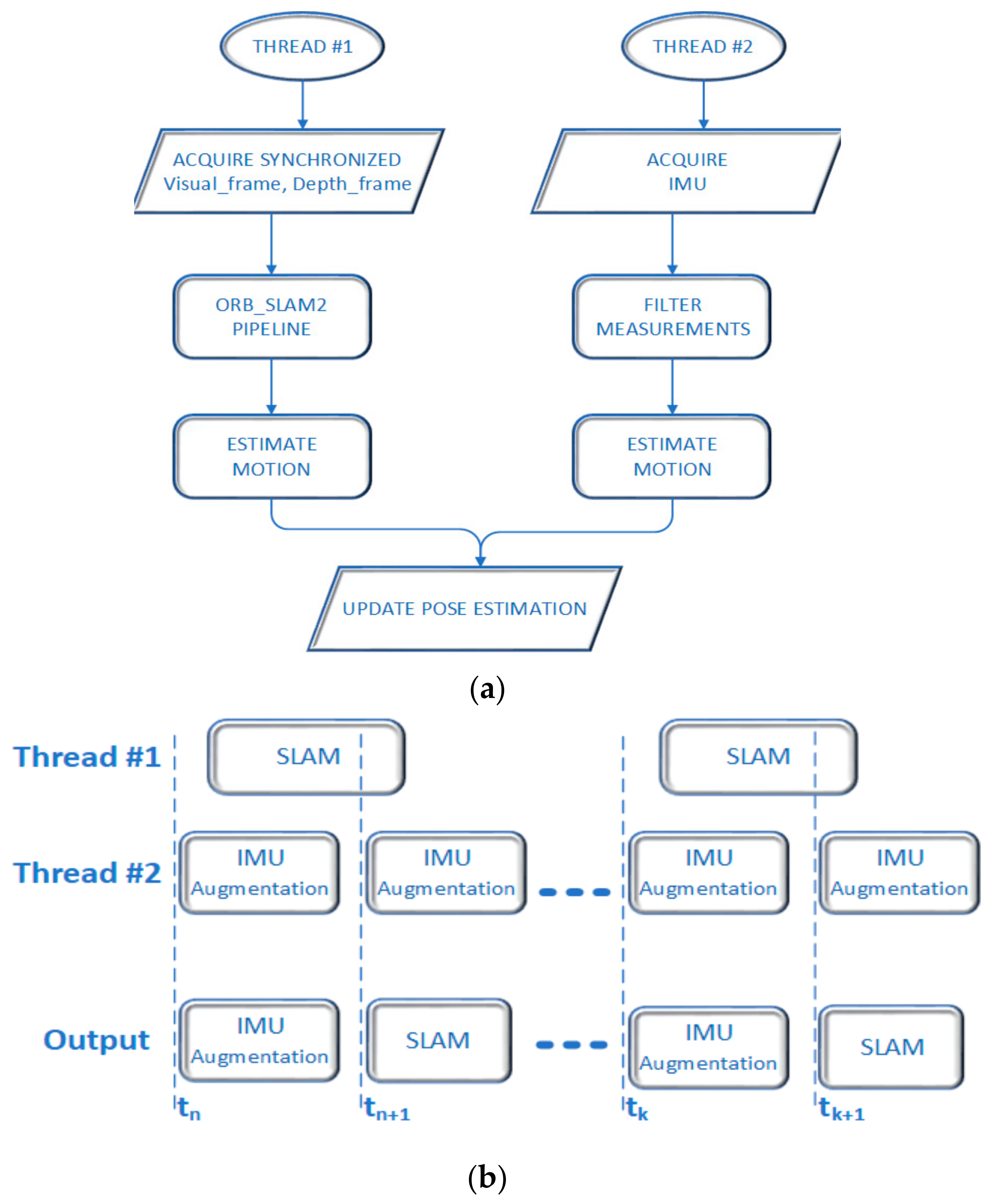
2.2.2. Architecture—The Vdio_Slam ROS Node
3. Testing and Results
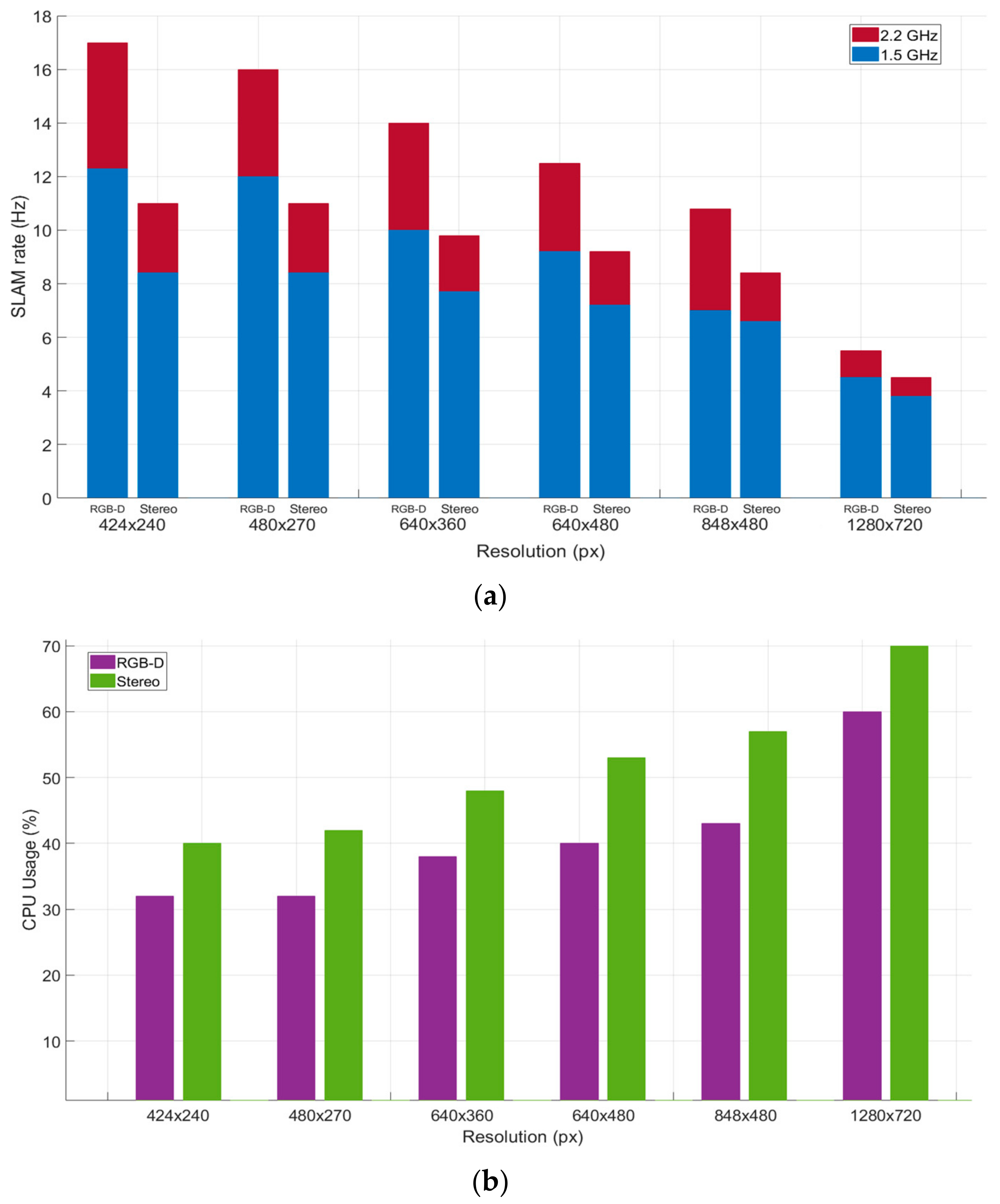
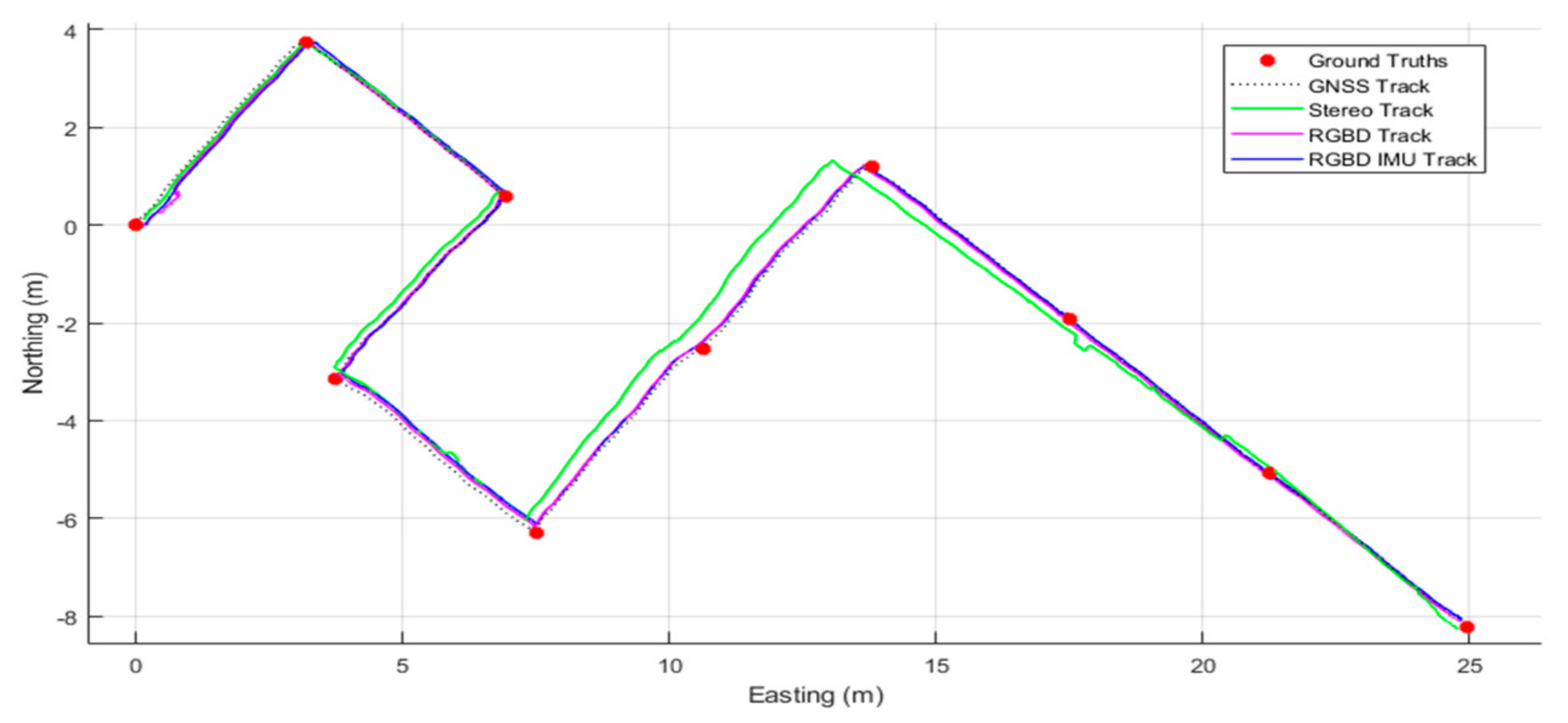
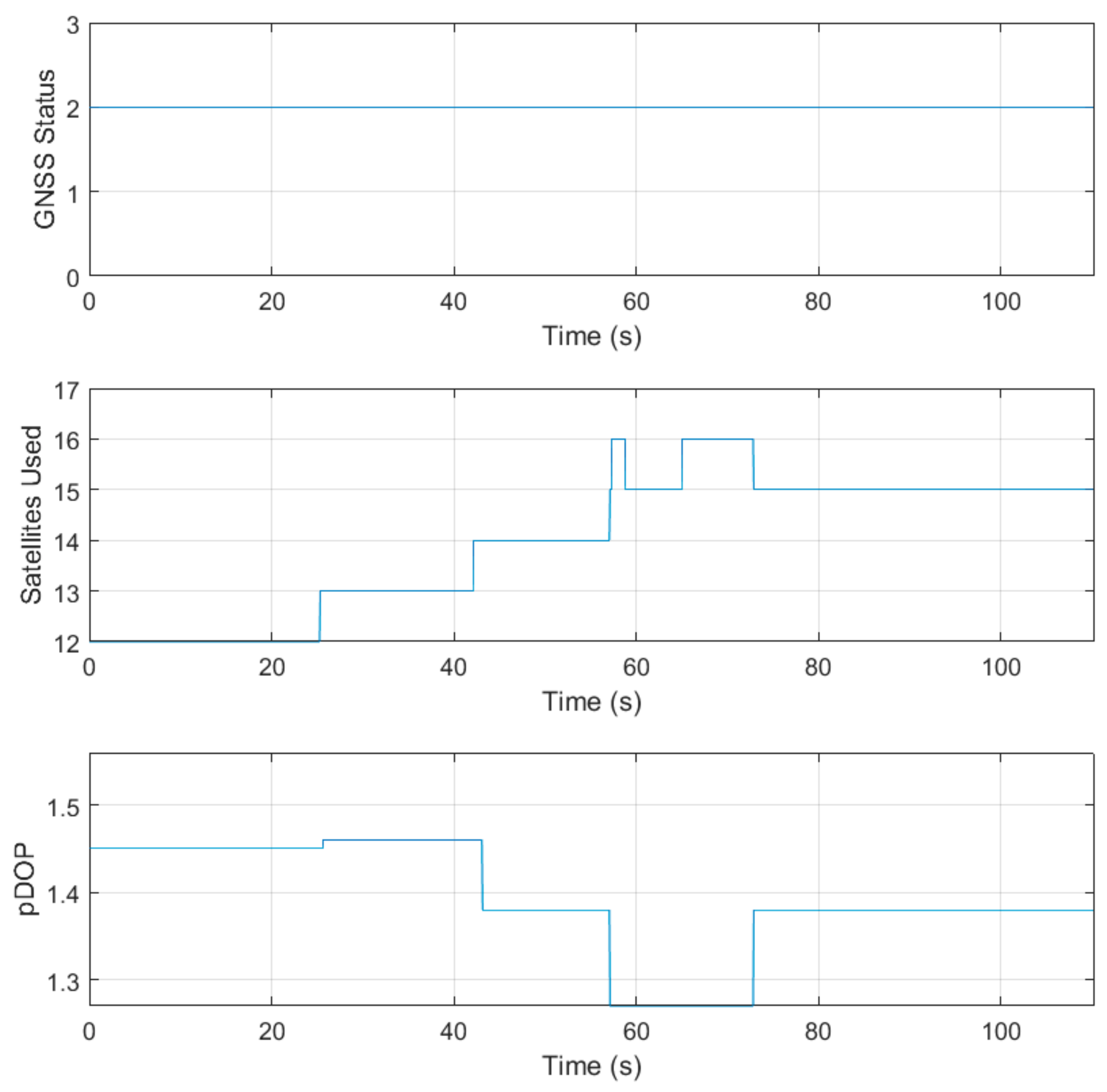
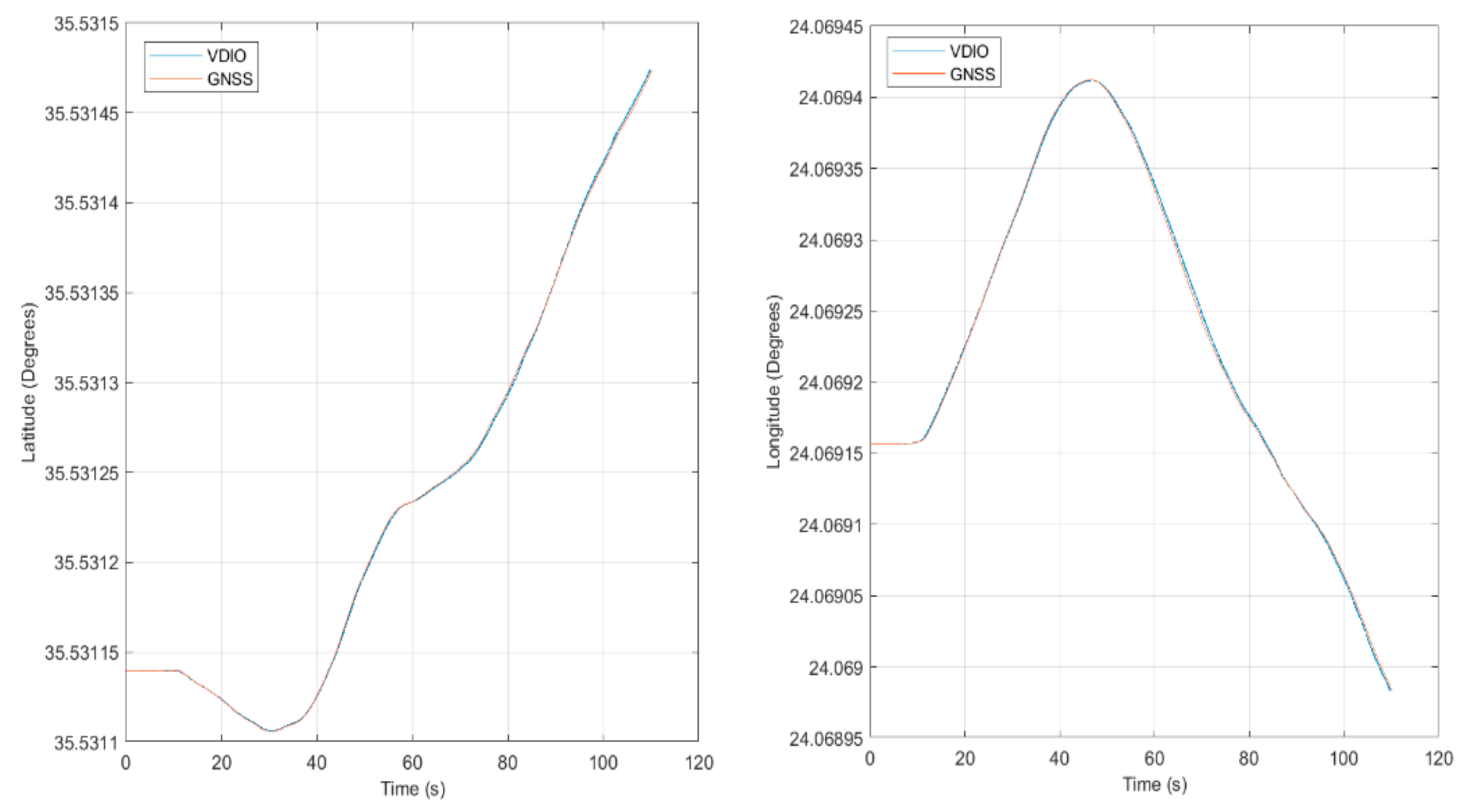
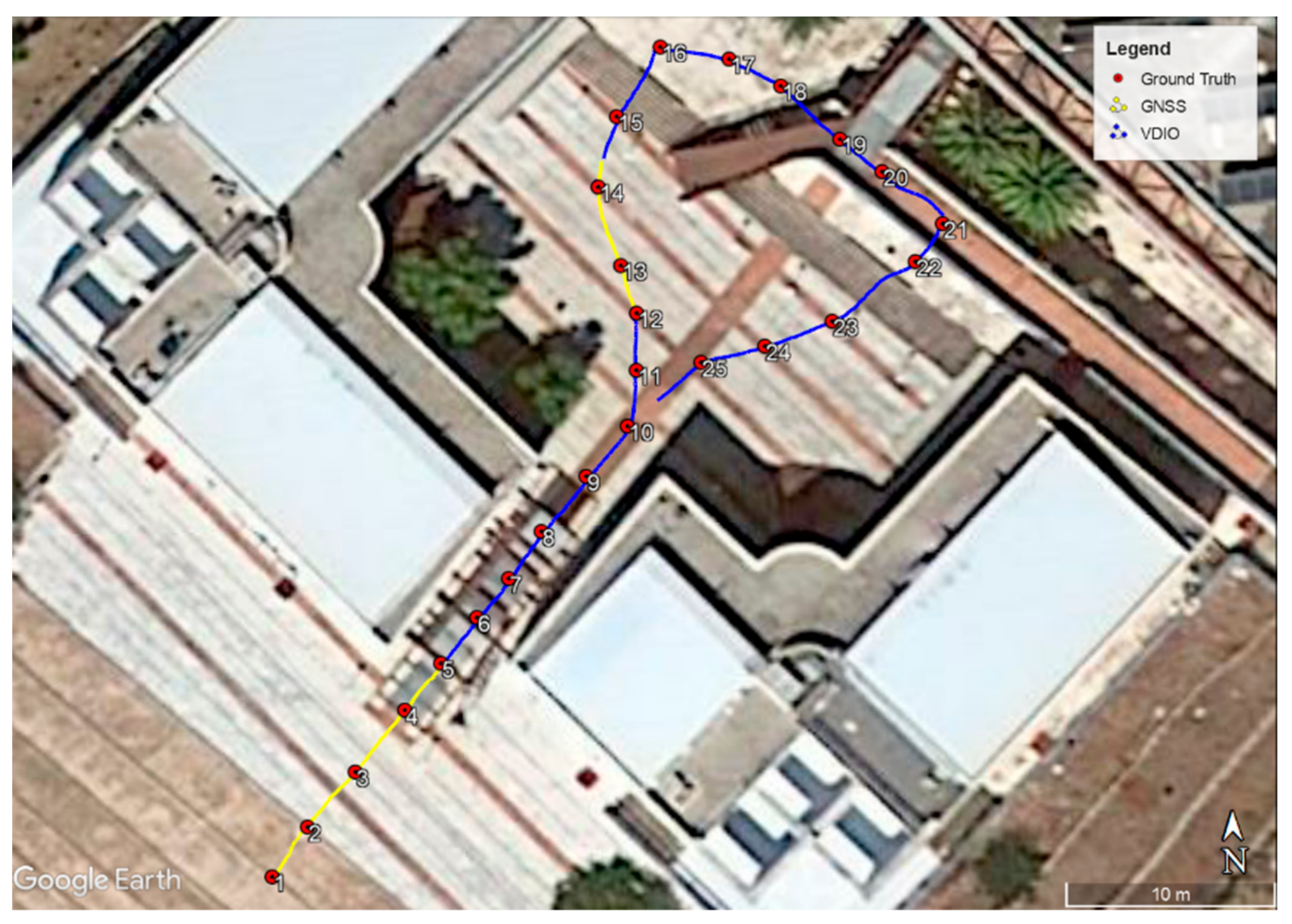
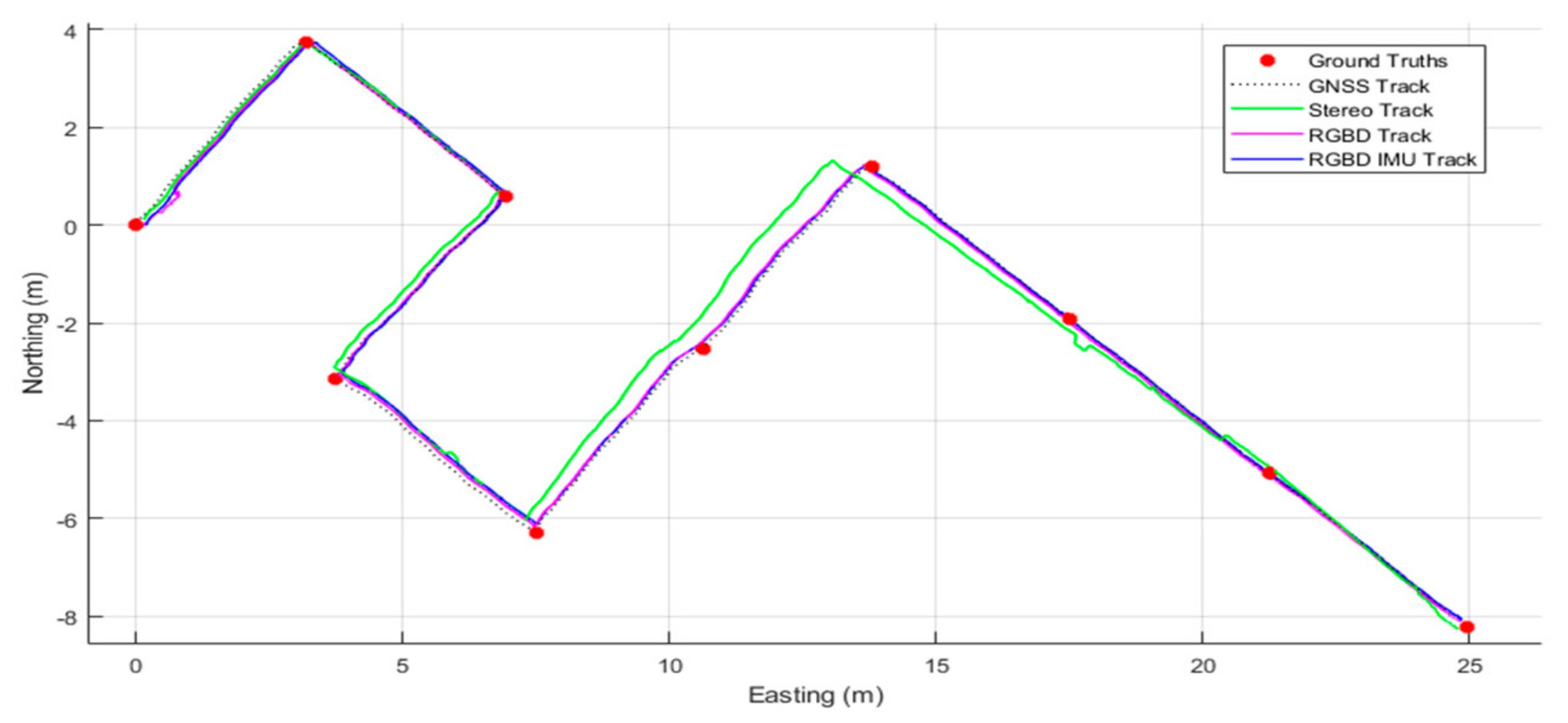
3.1. Evaluating the Localization Performance
- −1: Unable to fix position
- 0: Unaugment fix
- 1: Satellite-based augmentation
- 2: Ground-based augmentation
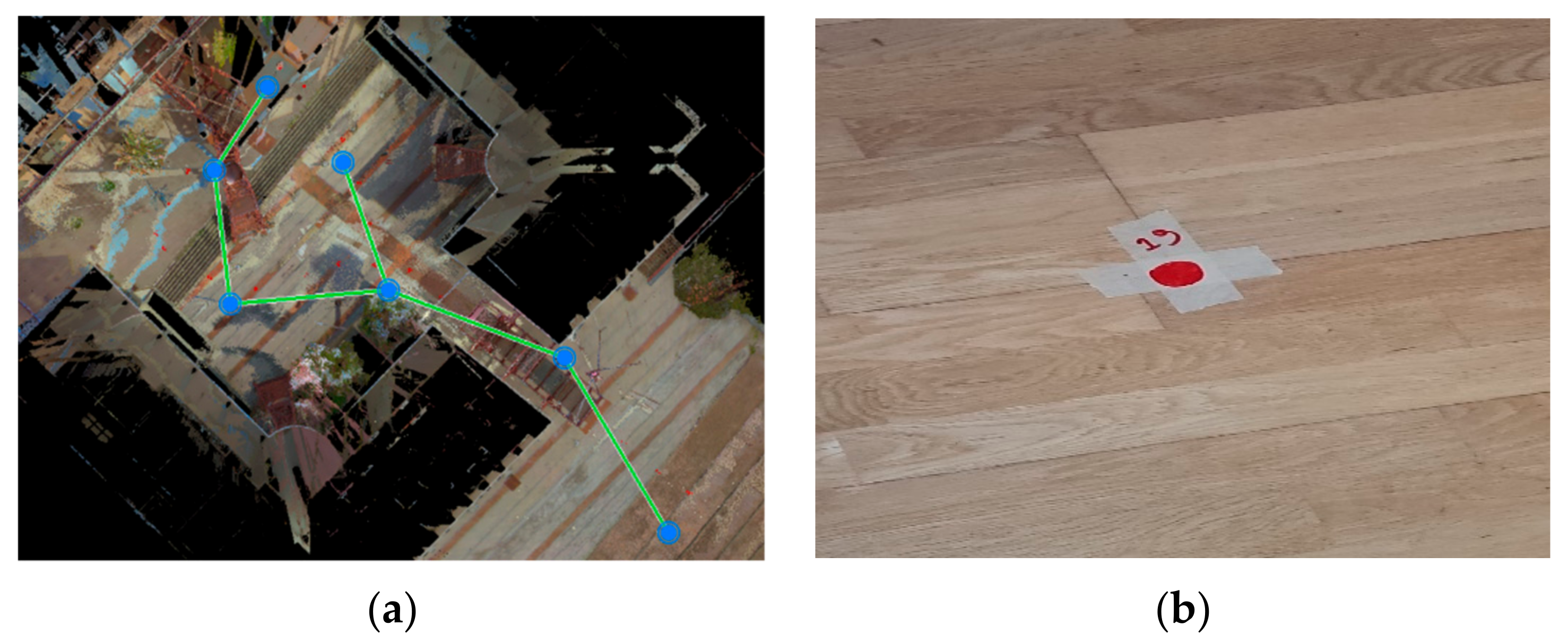
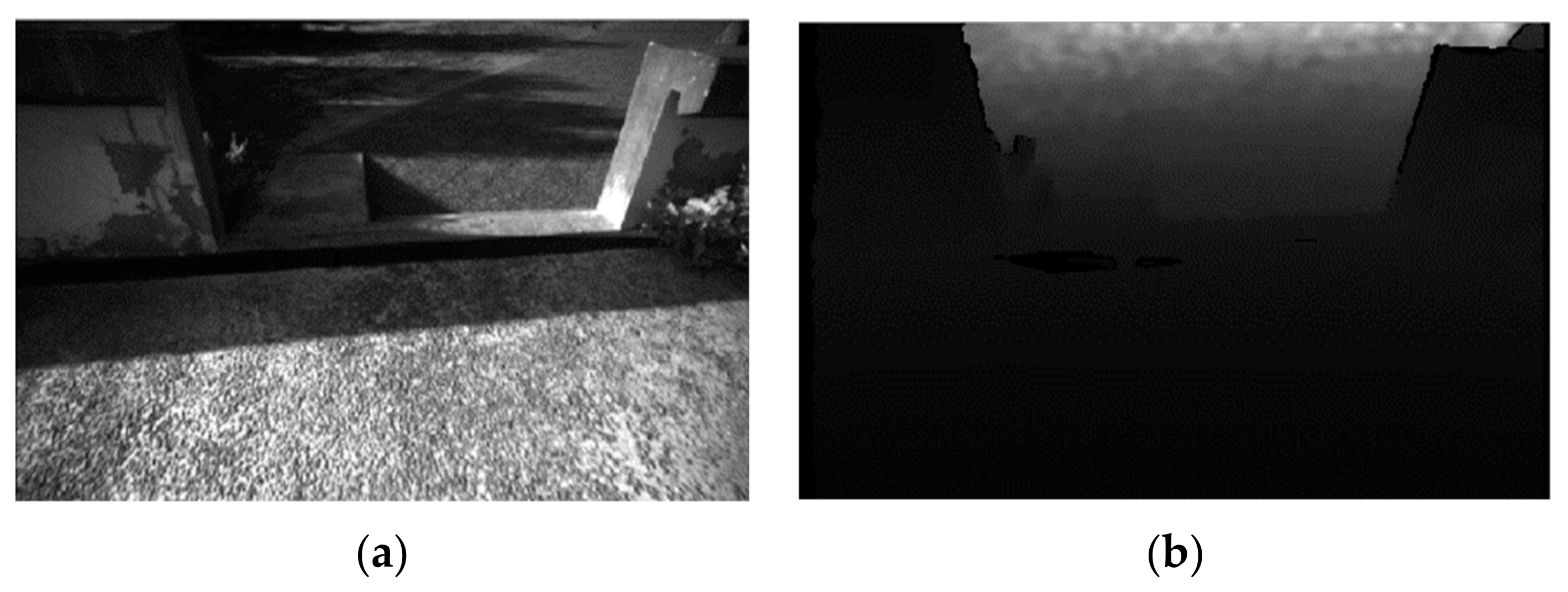
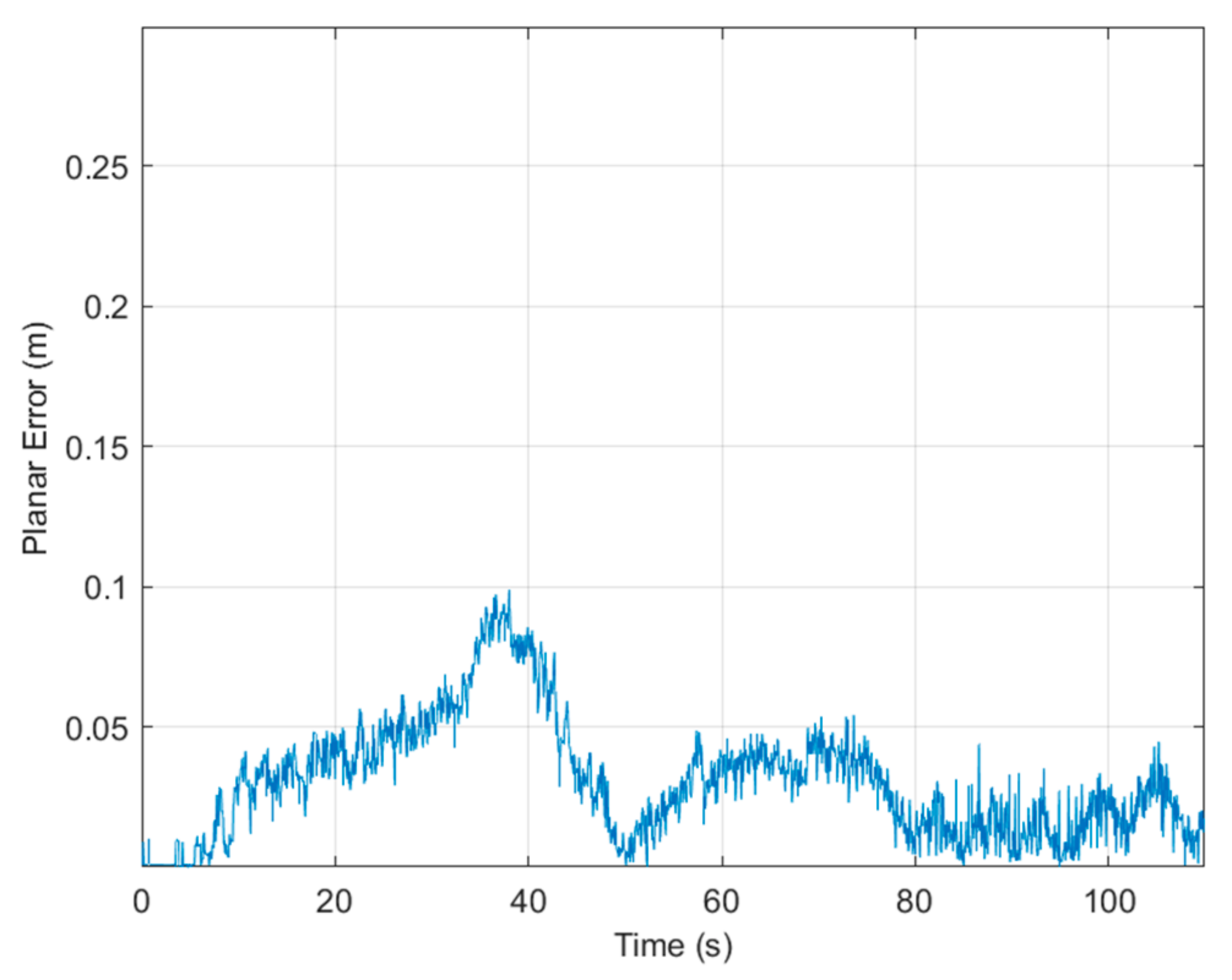
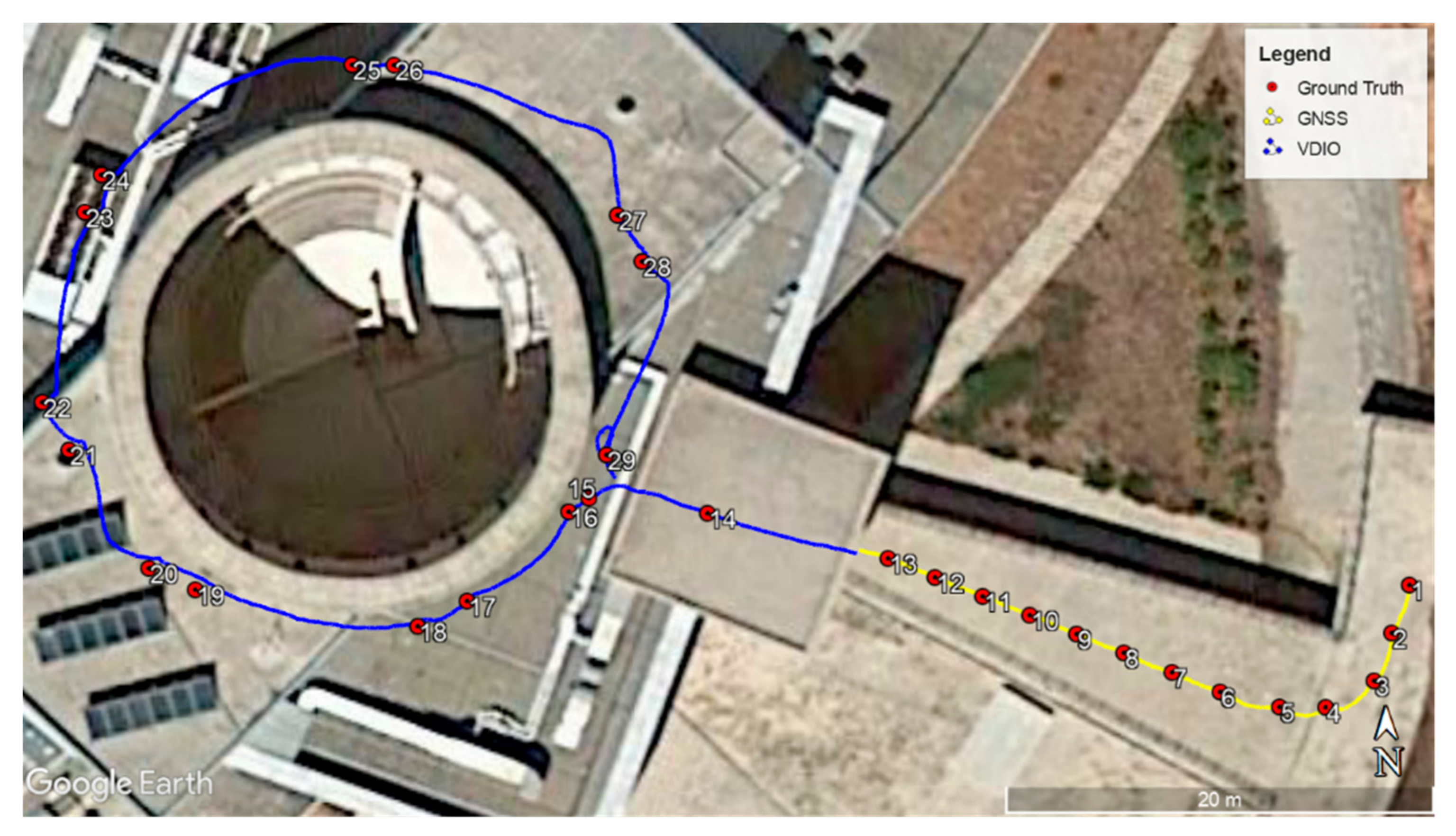
3.2. Flying in GNSS Challenging Areas
4. Discussion and Conclusions
4.1. Discusion on the Main Findings
4.2. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| EKF | Extended Kalman Filter |
| ENU | East North Up |
| FCU | Flight Control Unit |
| GNSS | Global Navigation Satellite Systems |
| IMU | Inertial Measuring Unit |
| KF | Kalman Filter |
| pDOP | Position Dilution of Precision |
| RF | Radio Frequency |
| RGB-D | Red Green Blue-Depth |
| ROS | Robotic Operating System |
| RPi | Raspberry Pi |
| RTK | Real-Time Kinematics |
| SLAM | Simultaneous Localization and Mapping |
| UAV | Uncrewed Aerial Vehicle |
References
- Kortunov, V.I.; Mazurenko, O.V.; Gorbenko, A.V.; Mohammed, W.; Hussein, A. Review and comparative analysis of mini- and micro-UAV autopilots. In Proceedings of the 2015 IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kyiv, Ukraine, 13–15 October 2015; pp. 284–289. [Google Scholar]
- Hulens, D.; Verbeke, J.; Goedemé, T. Choosing the Best Embedded Processing Platform for On-Board UAV Image Processing. In Computer Vision, Imaging and Computer Graphics Theory and Applications; Communications in Computer and Information Science; Springer: Cham, Switzerland, 2016; p. 598. [Google Scholar]
- Droeschel, D.; Behnke, S. Efficient Continuous-Time SLAM for 3D Lidar-Based Online Mapping. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5000–5007. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Doherty, P.; Rudol, P. A UAV Search and Rescue Scenario with Human Body Detection and Geolocalization. In Proceedings of the AI 2007: Advances in Artificial Intelligence, Gold Coast, Australia, 2–6 December 2007; p. 4830. [Google Scholar]
- Kyristsis, S.; Antonopoulos, A.; Chanialakis, T.; Stefanakis, E.; Linardos, C.; Tripolitsiotis, A.; Partsinevelos, P. Towards Autonomous Modular UAV Missions: The Detection, Geo-Location and Landing Paradigm. Sensors 2016, 16, 1844. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gyagenda, N.; Hatilima, J.V.; Roth, H.; Zhmud, V. A review of GNSS-independent UAV navigation techniques, Robot. Auton. Syst. 2022, 152, 104069. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Leccisi, M. Inertial Navigation Systems for UAV: Uncertainty and Error Measurements. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Torino, Italy, 19–21 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Zhou, Q.-L.; Zhang, Y.; Qu, Y.-H.; Rabbath, C.-A. Dead reckoning and Kalman filter design for trajectory tracking of a quadrotor UAV. In Proceedings of the 2010 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Qingdao, China, 15–17 July 2010; pp. 119–124. [Google Scholar] [CrossRef]
- Tiemann, J.; Wietfeld, C. Scalable and precise multi-UAV indoor navigation using TDOA-based UWB localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Li, X.; Ge, M.; Dai, X. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Hadas, T.; Kazmierski, K.; Sośnica, K. Performance of Galileo-only dual-frequency absolute positioning using the fully serviceable Galileo constellation. GPS Solut. 2019, 23, 108. [Google Scholar] [CrossRef] [Green Version]
- Fengyu, X.; Shirong, Y.; Pengfei, X.; Lewen, Z.; Nana, J.; Dezhong, C.; Guangbao, H. Assessing the latest performance of Galileo-only PPP and the contribution of Galileo to Multi-GNSS PPP. Adv. Space Res. 2019, 63, 2784–2795. [Google Scholar]
- Zhang, G.; Hsu, L.-T. Intelligent GNSS/INS integrated navigation system for a commercial UAV flight control system. Aerosp. Sci. Technol. 2018, 80, 368–380. [Google Scholar] [CrossRef]
- Krajník, T.; Nitsche, M.; Pedre, S.; Přeučil, L.; Mejail, M.E. A simple visual navigation system for an UAV. In Proceedings of the International Multi-Conference on Systems Signals & Devices, Chemnitz, Germany, 20–23 March 2012; pp. 1–6. [Google Scholar]
- Xu, Y.; Pan, L.; Du, C.; Li, J.; Jing, N.; Wu, J. Vision-based UAVs Aerial Image Localization: A Survey. In Proceedings of the 2nd ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery (GeoAI’18), Seattle, WA, USA, 6 November 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 9–18. [Google Scholar] [CrossRef]
- Rosser, K.; Chahl, J. Reducing the complexity of visual navigation: Optical track controller for long-range unmanned aerial vehicles. J. Field Robot. 2019, 36, 1118–1140. [Google Scholar] [CrossRef]
- Liu, X.; Guo, X.; Zhao, D.; Cao, H.; Tang, J.; Wang, C.; Shen, C.; Liu, J. Integrated Velocity Measurement Algorithm Based on Optical Flow and Scale-Invariant Feature Transform. IEEE Access 2019, 7, 153338–153348. [Google Scholar] [CrossRef]
- Du, H.; Wang, W.; Xu, C.; Xiao, R.; Sun, C. Real-Time Onboard 3D State Estimation of an Unmanned Aerial Vehicle in Multi-Environments Using Multi-Sensor Data Fusion. Sensors 2020, 20, 919. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdi, C.; Samadzadegan, F.; Kurz, F. Pose Estimation of Unmanned Aerial Vehicles Based on a Vision-Aided Multi-Sensor Fusion. XXII ISPRS Congress. Tech. Comm. I 2016, 41, 193–199. [Google Scholar]
- Konovalenko, I.A.; Miller, A.B.; Miller, B.M.; Nikolaev, D.P. UAV Navigation on The Basis Of The Feature Points Detection On Underlying Surface. In European Conference on Modelling and Simulation (ECMS); ECMS: Albena, Bulgaria, 2015. [Google Scholar]
- Avola, D.; Cinque, L.; Fagioli, A.; Foresti, G.L.; Massaroni, C.; Pannone, D. Feature-Based SLAM Algorithm for Small Scale UAV with Nadir View. In Proceedings of the Image Analysis and Processing—ICIAP, Trento, Italy, 9–13 September 2019; Volume 11752. [Google Scholar]
- Santamaria-Navarro, A.; Loianno, G.; Solà, J. Autonomous navigation of micro aerial vehicles using high-rate and low-cost sensors. Auton. Robot. 2018, 42, 1263–1280. [Google Scholar] [CrossRef] [Green Version]
- Mur-Artal, R.; Tardós, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Bourque, D. CUDA-Accelerated ORB-SLAM for UAVs. Master’s Thesis, Worcester Polytechnic Institute, Worcester, MA, USA, 2017; p. 882. [Google Scholar]
- Yusefı, A.; Durdu, A.; Sungur, C. ORB-SLAM-based 2D Reconstruction of Environment for Indoor Autonomous Navigation of UAVs. Eur. J. Sci. Technol. 2020, 466–472. [Google Scholar] [CrossRef]
- Haddadi, S.J.; Castelan, E.B. Visual-Inertial Fusion for Indoor Autonomous Navigation of a Quadrotor Using ORB-SLAM. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), João Pessoa, Brazil, 6–10 November 2018; pp. 106–111. [Google Scholar] [CrossRef]
- Lekkala, K.K.; Mittal, V.K. Accurate and augmented navigation for quadcopter based on multi-sensor fusion. In Proceedings of the 2016 IEEE Annual India Conference (INDICON), Bangalore, India, 16–18 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Skoglund, M.; Petig, T.; Vedder, B.; Eriksson, H.; Schiller, E.M. Static and dynamic performance evaluation of low-cost RTK GPS receivers. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 16–19. [Google Scholar] [CrossRef]
- Cube Flight Controller. Available online: https://docs.px4.io/v1.9.0/en/flight_controller/pixhawk-2.html (accessed on 1 December 2021).
- ZED-F9P Module. Available online: https://www.u-blox.com/en/product/zed-f9p-module (accessed on 1 December 2021).
- Maqsood, M.; Gao, S.; Brown, T.W.C.; Unwin, M.; de vos Van Steenwijk, R.; Xu, J.D. A Compact Multipath Mitigating Ground Plane for Multiband GNSS Antennas. IEEE Trans. Antennas Propag. 2013, 61, 2775–2782. [Google Scholar] [CrossRef] [Green Version]
- Raspberry Pi 4. Available online: https://www.raspberrypi.com/products/raspberry-pi-4-model-b/ (accessed on 1 December 2021).
- Intel Realsense D435. Available online: https://www.intelrealsense.com/depth-camera-d435/ (accessed on 1 December 2021).
- Intel Realsense Projectors. Available online: https://www.intelrealsense.com/wp-content/uploads/2019/03/WhitePaper_on_Projectors_for_RealSense_D4xx_1.0.pdf (accessed on 1 December 2021).
- Robotic Operating System (ROS). Available online: https://www.ros.org/ (accessed on 1 December 2021).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- ROS REP 103—Standard Units of Measure and Coordinate Conventions. Available online: https://www.ros.org/reps/rep-0103.html (accessed on 1 December 2021).
- ROS REP 105—Coordinate Frames for Mobile Platforms. Available online: https://www.ros.org/reps/rep-0105.html (accessed on 1 December 2021).
- Foote, T. tf: The transform library. In Proceedings of the 2013 IEEE Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 22–23 April 2013; pp. 1–6. [Google Scholar]
- Nie, Z.; Gao, Y.; Wang, Z.; Ji, S. A new method for satellite selection with controllable weighted PDOP threshold. Surv. Rev. 2017, 49, 285–293. [Google Scholar] [CrossRef]
- Teng, Y.; Wang, J. Some Remarks on PDOP and TDOP for Multi-GNSS Constellations. J. Navig. 2016, 69, 145–155. [Google Scholar] [CrossRef] [Green Version]
- da Silva Medeiros, L.; Julio, R.E.; Almeida, R.M.A.; Bastos, G.S. Enabling Real-Time Processing for ROS2 Embedded Systems. In Robot Operating System (ROS); Koubaa, A., Ed.; Studies in Computational Intelligence; Springer: Cham, Switzerland, 2019; Volume 778. [Google Scholar] [CrossRef]
- Puck, L.; Keller, P.; Schnell, T.; Plasberg, C.; Tanev, A.; Heppner, G.; Roennau, A.; Dillmann, R. Performance Evaluation of Real-Time ROS2 Robotic Control in a Time-Synchronized Distributed Network. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1670–1676. [Google Scholar] [CrossRef]
- Puck, L.; Keller, P.; Schnell, T.; Plasberg, C.; Tanev, A.; Heppner, G.; Roennau, A.; Dillmann, R. Distributed and Synchronized Setup towards Real-Time Robotic Control using ROS2 on Linux. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 1287–1293. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Error 2D | Error Height | Error 3D | |||
|---|---|---|---|---|---|---|
| Average (m) | Variance (m2) | Average (m) | Variance (m2) | Average (m) | Variance (m2) | |
| GNSS | 0.0129 | 0.0002 | 0.0066 | <0.00005 | 0.0157 | 0.0002 |
| Stereo SLAM | 0.2195 | 0.0202 | 0.0402 | 0.0010 | 0.2255 | 0.0200 |
| RGBD SLAM | 0.0866 | 0.0024 | 0.0124 | 0.0001 | 0.0885 | 0.0023 |
| RGBD, IMU SLAM (VDIO) | 0.0832 | 0.0054 | 0.0142 | 0.0001 | 0.0881 | 0.0048 |
| Error 2D | Error Height | Error 3D | |||
|---|---|---|---|---|---|
| Average (m) | Variance (m2) | Average (m) | Variance (m2) | Average (m) | Variance (m2) |
| 0.0747 | 0.0052 | 0.1154 | 0.0223 | 0.1491 | 0.0240 |
| Error 2D | Error Height | Error 3D | |||
|---|---|---|---|---|---|
| Average (m) | Variance (m2) | Average (m) | Variance (m2) | Average (m) | Variance (m2) |
| 0.0747 | 0.0052 | 0.1154 | 0.0223 | 0.1491 | 0.0240 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonopoulos, A.; Lagoudakis, M.G.; Partsinevelos, P. A ROS Multi-Tier UAV Localization Module Based on GNSS, Inertial and Visual-Depth Data. Drones 2022, 6, 135. https://doi.org/10.3390/drones6060135
Antonopoulos A, Lagoudakis MG, Partsinevelos P. A ROS Multi-Tier UAV Localization Module Based on GNSS, Inertial and Visual-Depth Data. Drones. 2022; 6(6):135. https://doi.org/10.3390/drones6060135
Chicago/Turabian StyleAntonopoulos, Angelos, Michail G. Lagoudakis, and Panagiotis Partsinevelos. 2022. "A ROS Multi-Tier UAV Localization Module Based on GNSS, Inertial and Visual-Depth Data" Drones 6, no. 6: 135. https://doi.org/10.3390/drones6060135
APA StyleAntonopoulos, A., Lagoudakis, M. G., & Partsinevelos, P. (2022). A ROS Multi-Tier UAV Localization Module Based on GNSS, Inertial and Visual-Depth Data. Drones, 6(6), 135. https://doi.org/10.3390/drones6060135