
Formation Tracking Control for Multi-Agent Systems with Collision Avoidance and Connectivity Maintenance

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Collision avoidance and connectivity maintenance of multi-agent systems are essential components. In [28,45], potential functions for these two issues were separately established to deal with them, but, in this paper, the above two problems are handled together by one potential function. In addition, compared to [27,28,43], the potential function designed in this paper has fewer parameters and a simpler structure.
- (2)
- In [28], the adjacency weights of any two agents switched from 0 to 1 when they built up contact, and this caused the adjacency matrix and Laplacian matrix to be discontinuous. Furthermore, in [28,42,46], the adjacency weight for any two agents could not represent the fact that the power of the interconnection was restricted by distance. As a result, we employ a bump function and incorporate it into the adjacent matrix that smoothly varies from 0 to 1 to address the two problems.
- (3)
- In [23], the author designed collision avoidance areas and collision areas for multi-agent systems. In addition, the collision region and communication region were also considered in [41,45,46,47]. However, these works were all associated with fixed communication topologies that have disadvantages in practice. In this paper, we transform the fixed communication topology into the time-varying topology by designing the sensing radius to overcome the disadvantage.
2. Problem Formulation
2.1. Agent Model
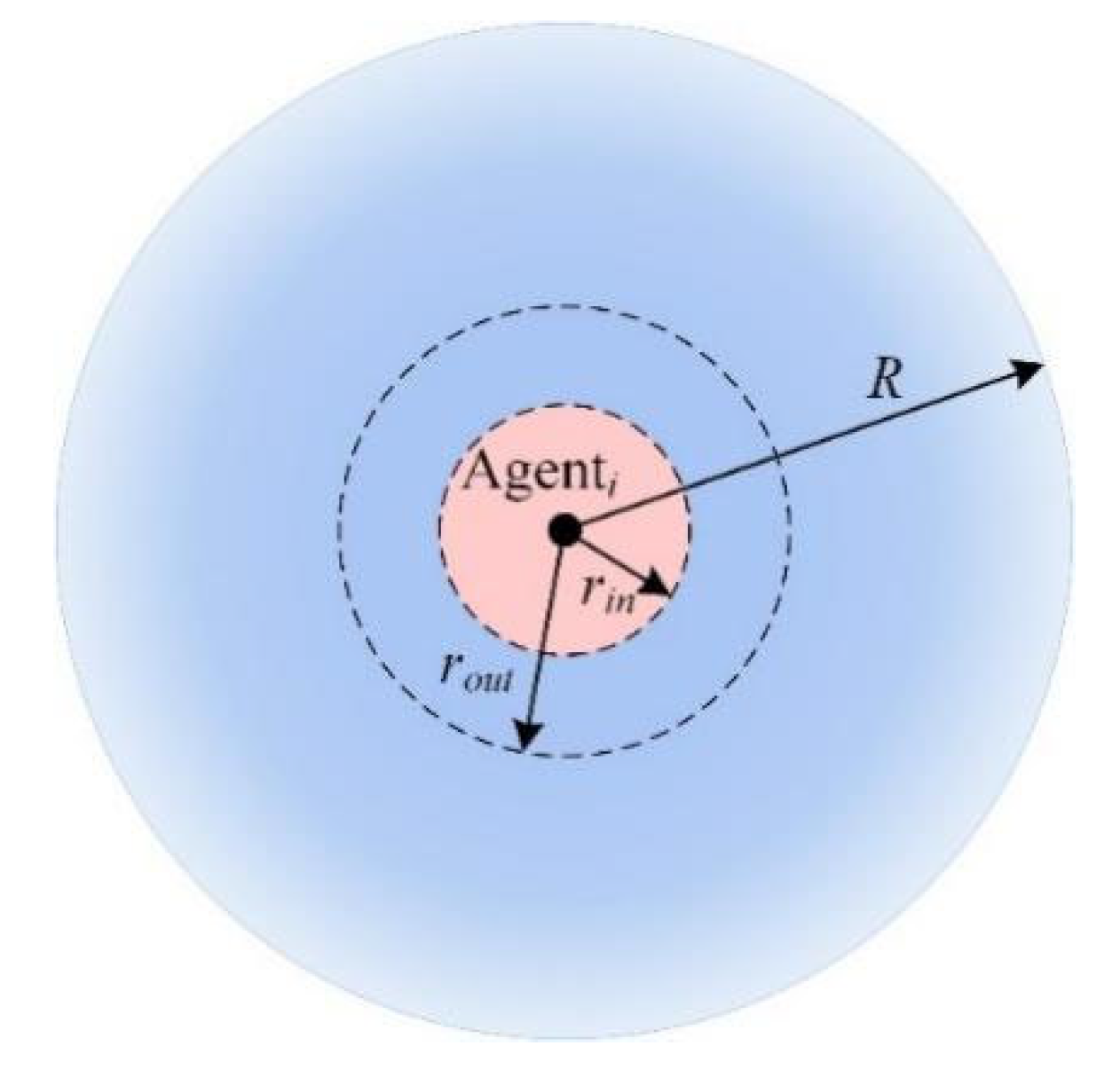
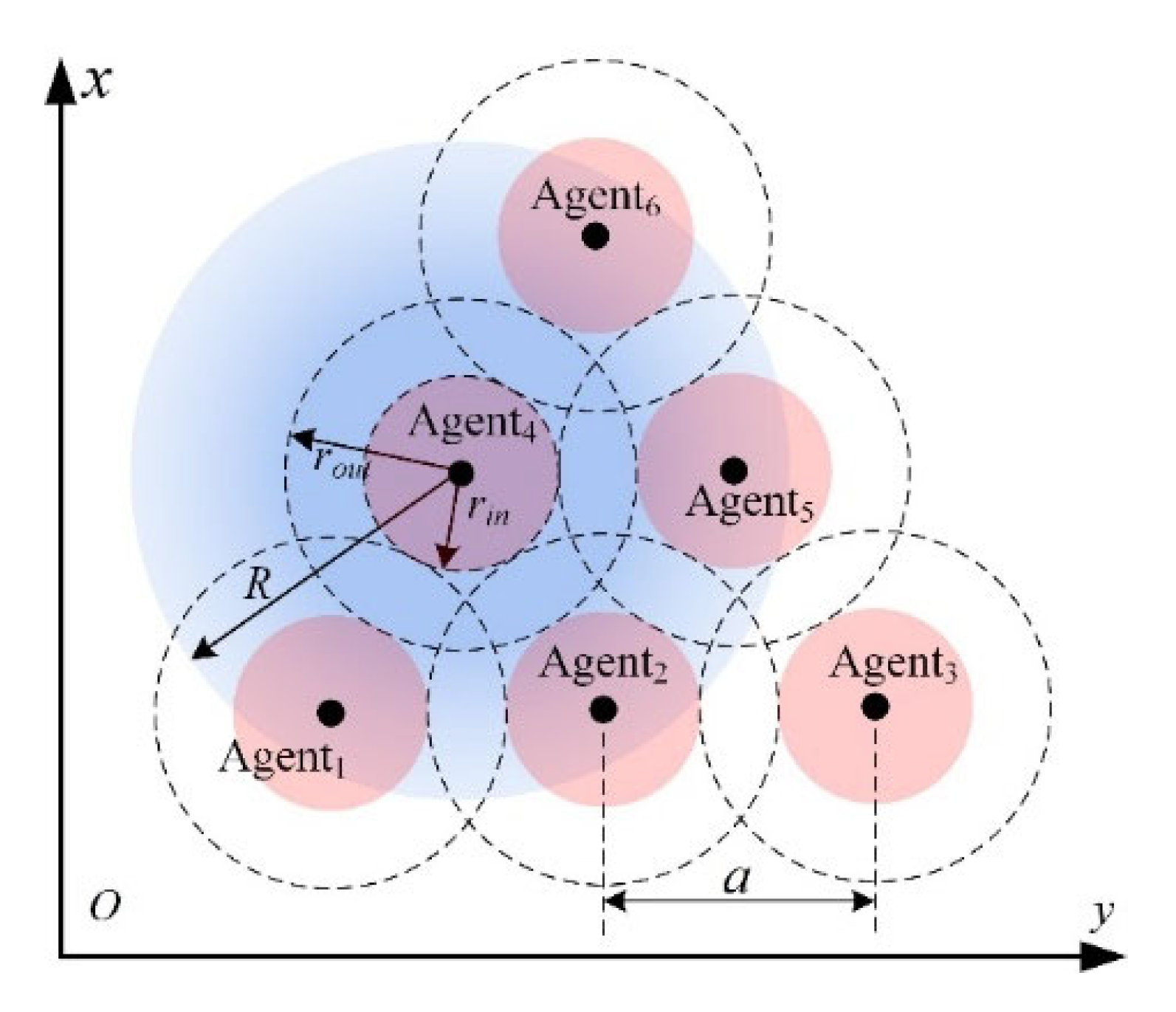
2.2. Dynamic Topology
2.2.1. Graph Theory
- λ1 = 0, with corresponding eigenvector, i.e., the vector of all entries equal to 1;
- λn ≥ …λ2 > 0.
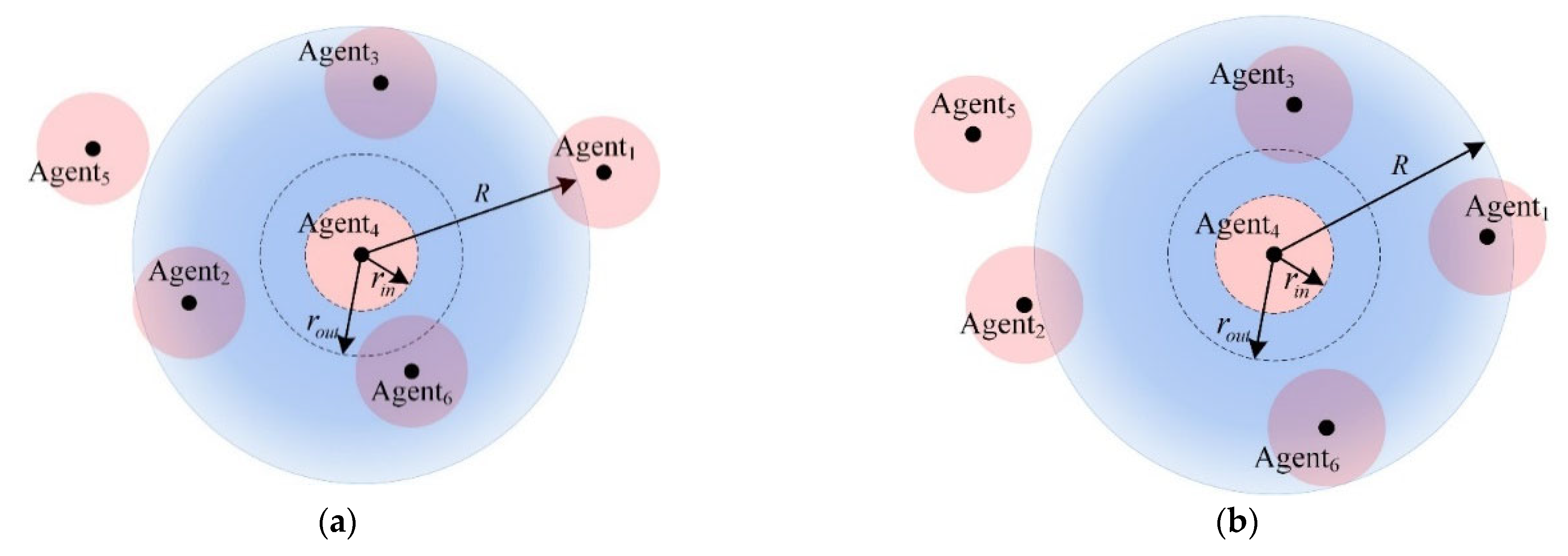
2.2.2. Time-Varying Graph
2.3. Control Objective
- Track the desired trajectory: (i ∈ υ), for all t ≥ t0;
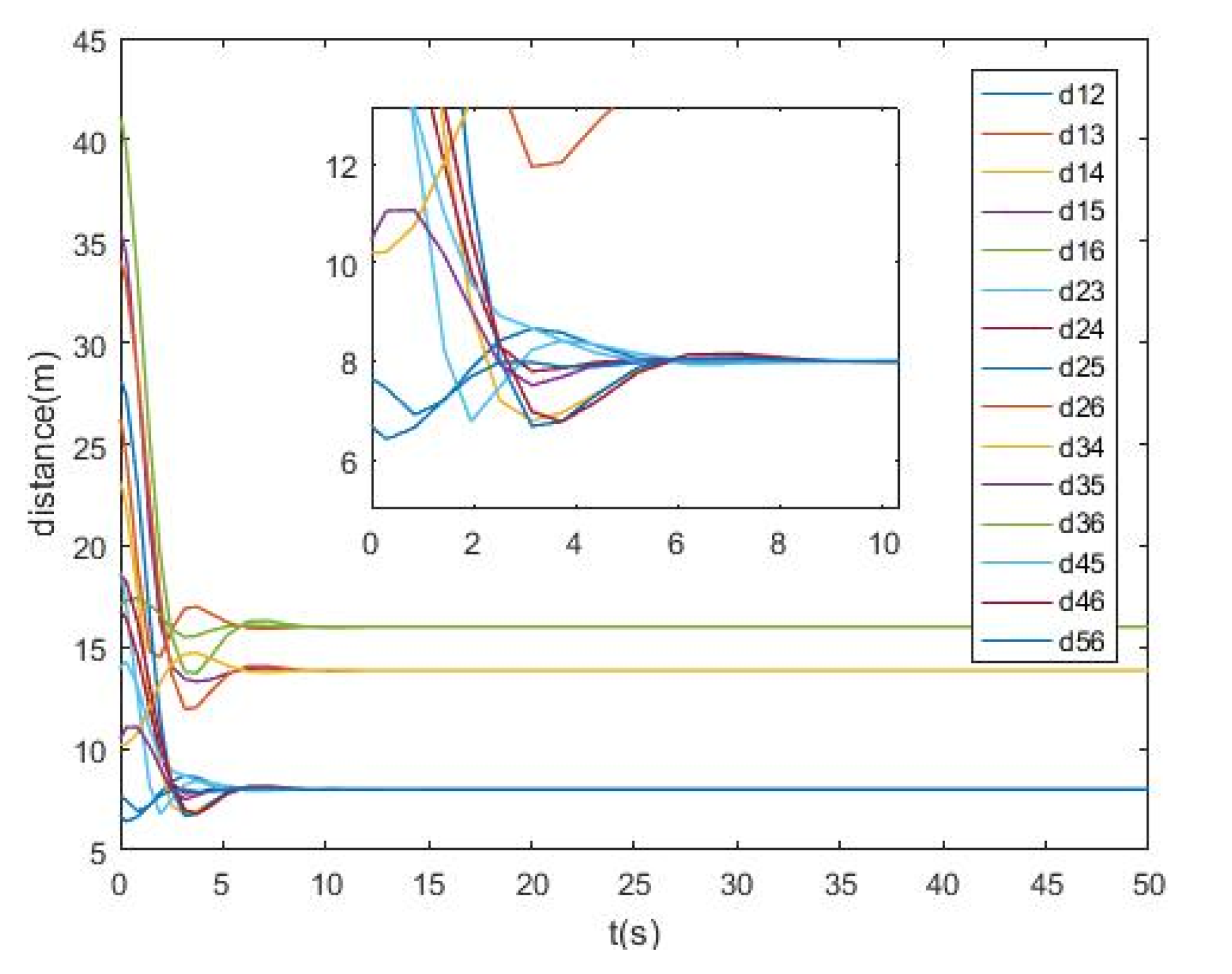
- Achieve and maintain the desired formation: and (i, j ∈ υ, i ≠ j), for all t ≥ t0;
- Collision avoidance: if , then (i, j ∈ υ, i ≠ j), for all t ≥ t0;
- Connectivity maintenance: (i, j ∈ υ, i ≠ j), for all t ≥ t0.
3. Main Results
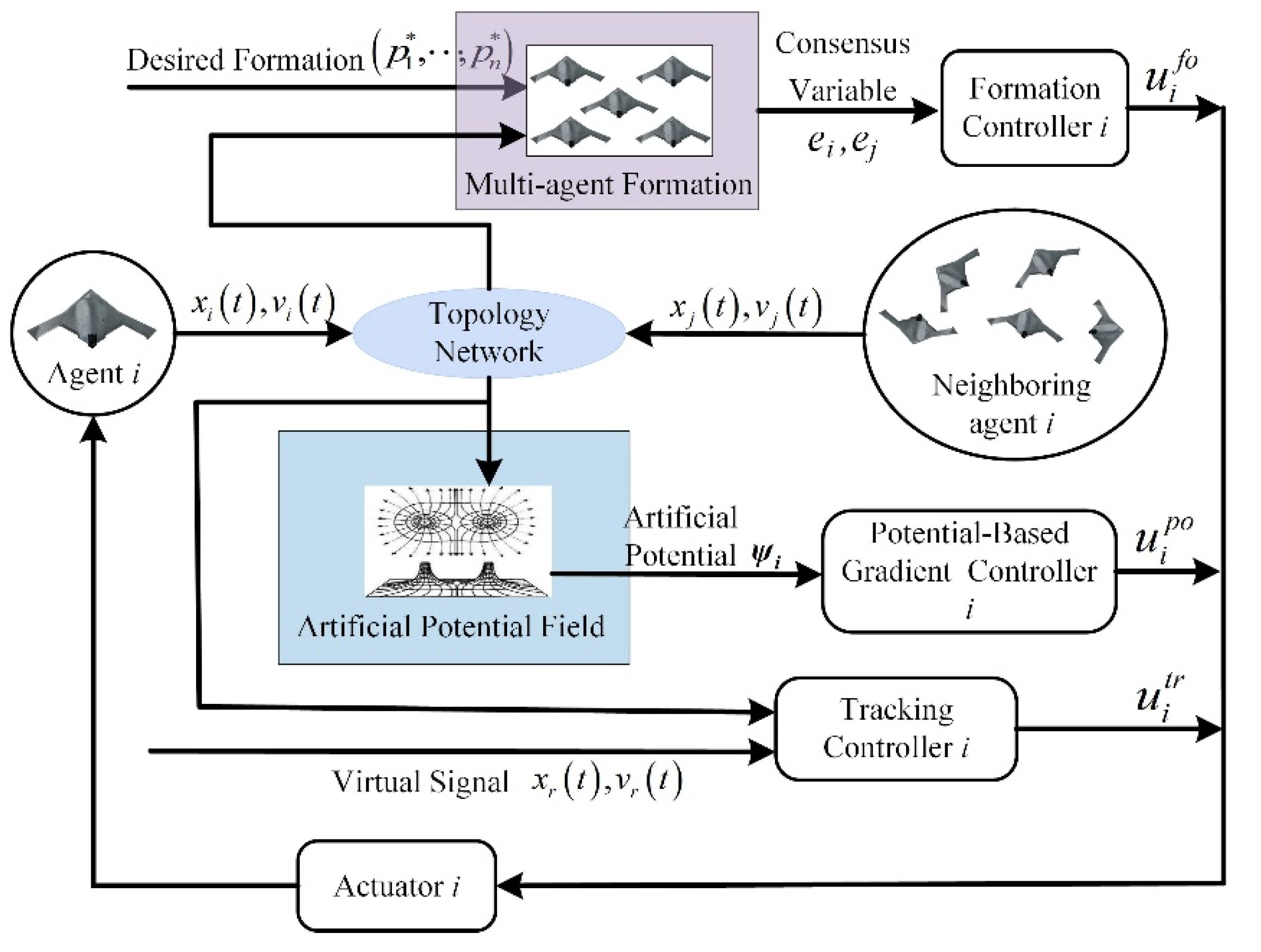
3.1. Controller Design
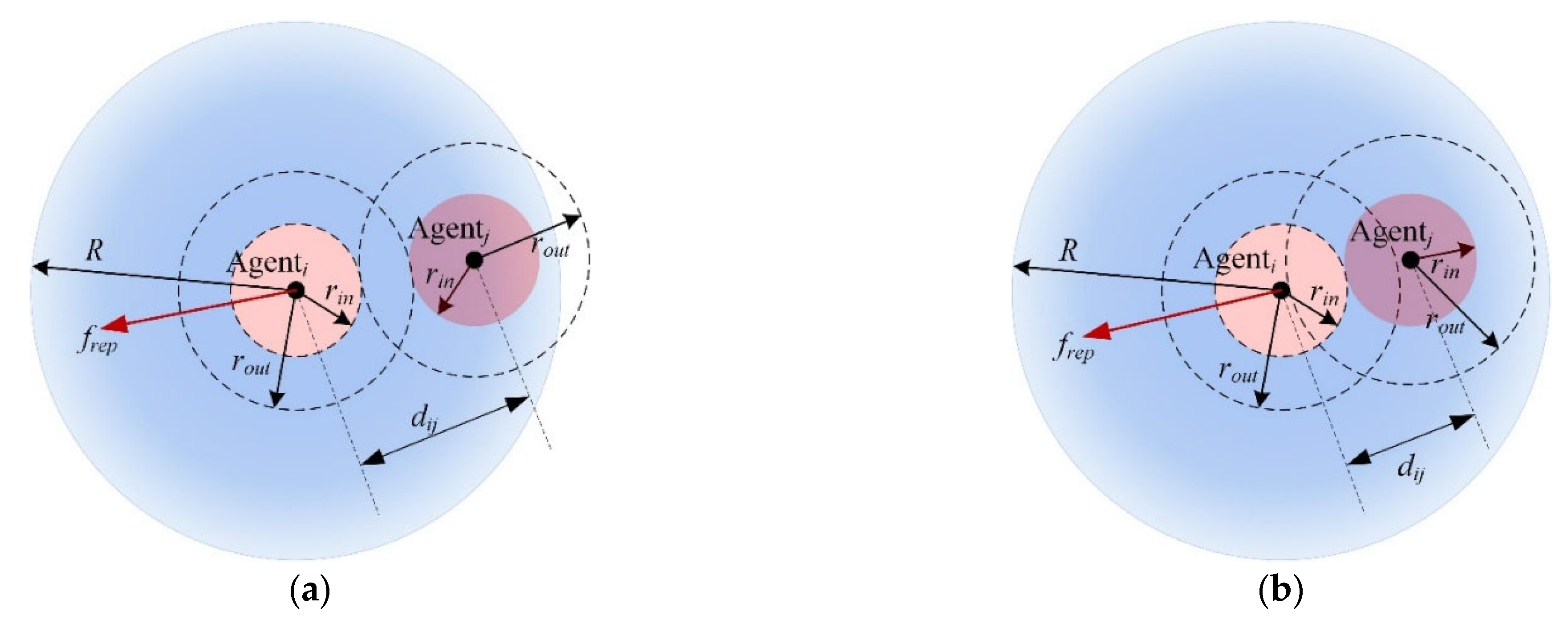
3.1.1. Potential-Based Gradient Term
3.1.2. Formation Term
3.1.3. Navigation Term
3.2. Stability Analysis
- 1
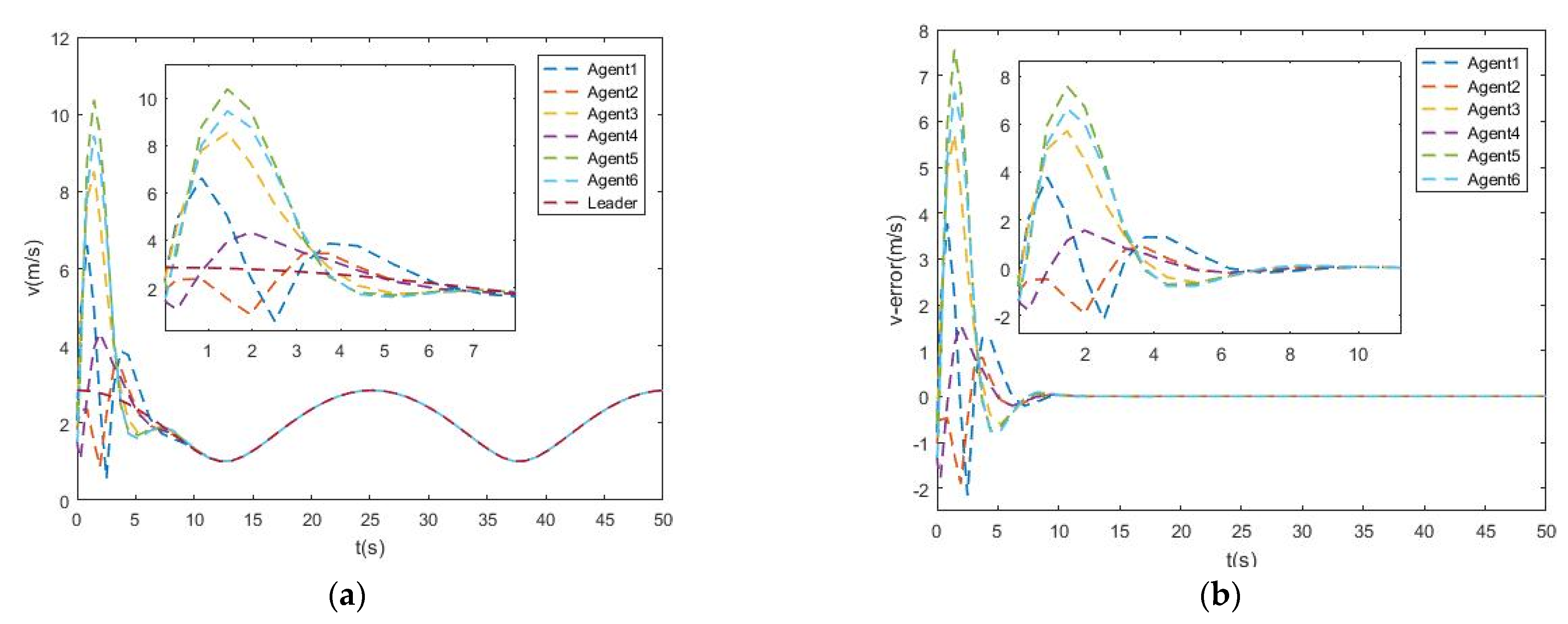
- All of the velocities of agents asymptotically approach the velocity of the virtual leader, i.e.,
- 2
- The multi-agent system eventually approaches a positional structure, which is the global minimum of the artificial potentials energy Ep(x), i.e.,
- 3
- There are no collisions between any two mobile agents: dij > 2rin ∀t ≥ t0, for i, j ∈ υ, i ≠ j.
4. Numerical Simulation
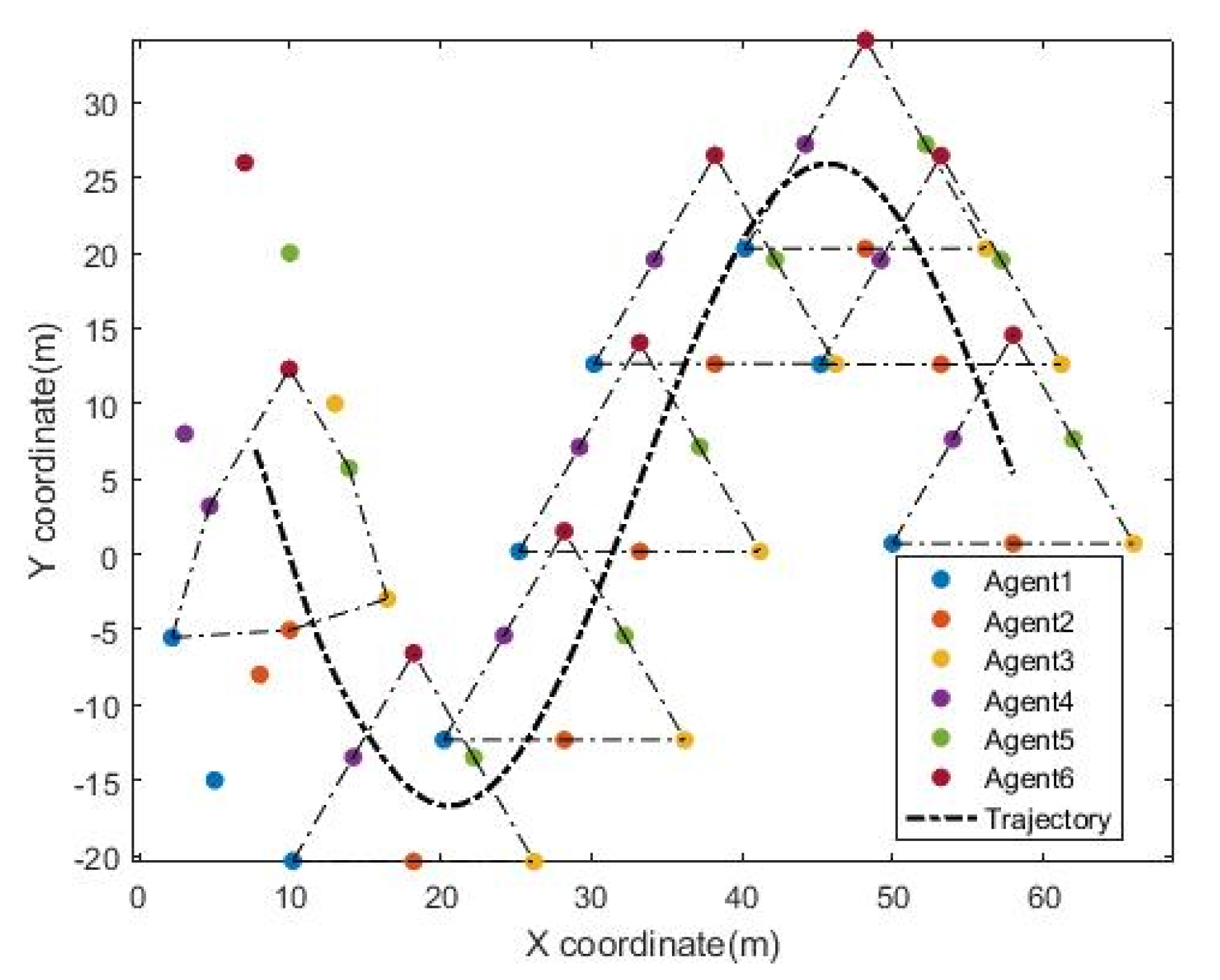
4.1. An Equilateral Triangle Formation
4.2. A Hexagon Formation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 1 August 1987; pp. 25–34. [Google Scholar]
- Dorri, A.; Kanhere, S.S.; Jurdak, R. Multi-Agent Systems: A Survey. IEEE Access 2018, 6, 28573–28593. [Google Scholar] [CrossRef]
- Litimein, H.; Huang, Z.-Y.; Hamza, A. A Survey on Techniques in the Circular Formation of Multi-Agent Systems. Electronics 2021, 10, 2959. [Google Scholar] [CrossRef]
- Wang, C.; Tnunay, H.; Zuo, Z.; Lennox, B.; Ding, Z. Fixed-time formation control of multirobot systems: Design and experiments. IEEE Trans. Ind. Electron. 2018, 66, 6292–6301. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, K.; Jiang, B.; Ding, S.X. Fixed-Time Formation Tracking for Heterogeneous Multi-Agent Systems under Actuator Faults and Directed Topologies. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3063–3077. [Google Scholar] [CrossRef]
- Yan, D.; Zhang, W.; Chen, H. Design of a Multi-Constraint Formation Controller Based on Improved MPC and Consensus for Quadrotors. Aerospace 2022, 9, 94. [Google Scholar] [CrossRef]
- Saif, A.W.; Alabsari, N.; Ferik, S.E.; Elshafei, M. Formation control of quadrotors via potential field and geometric techniques. Int. J. Adv. Appl. Sci. 2020, 7, 82–96. [Google Scholar] [CrossRef]
- Yuan, C.; Licht, S.; He, H. Formation learning control of multiple autonomous underwater vehicles with heterogeneous non-linear uncertain dynamics. IEEE Trans. Cybern. 2018, 48, 2920–2934. [Google Scholar] [CrossRef]
- Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control IFAC Affiliated J. 2007, 17, 1002–1033. [Google Scholar] [CrossRef]
- Oh, K.-K.; Ahn, H.-S. Formation Control and Network Localization via Orientation Alignment. IEEE Trans. Autom. Control 2013, 59, 540–545. [Google Scholar] [CrossRef]
- Babazadeh, R.; Selmic, R. Distance-Based Multiagent Formation Control with Energy Constraints Using SDRE. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 41–56. [Google Scholar] [CrossRef]
- Aryankia, K.; Selmic, R.R. Neural Network-Based Formation Control with Target Tracking for Second-Order Nonlinear MultiAgent Systems. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 328–341. [Google Scholar] [CrossRef]
- Trinh, M.H.; Zhao, S.; Sun, Z.; Zelazo, D.; Anderson, B.D.; Ahn, H.-S. Bearing-Based Formation Control of A Group of Agents with Leader-First Follower Structure. IEEE Trans. Autom. Control 2018, 64, 598–613. [Google Scholar] [CrossRef]
- Luo, X.; Li, X.; Guan, X. Bearing-only formation control of multi-agent systems in local reference frames. Int. J. Control 2021, 94, 1261–1272. [Google Scholar] [CrossRef]
- Li, X.; Wen, C.; Chen, C. Adaptive Formation Control of Networked Robotic Systems with Bearing-Only Measurements. IEEE Trans. Cybern. 2020, 51, 199–209. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.L. Distributed formation control of networked multi-agent systems using a dynamic event-triggered commu-nication mechanism. IEEE Trans. Ind. Electro. 2017, 64, 8118–8127. [Google Scholar] [CrossRef]
- Yu, H.; Shi, P.; Lim, C.-C.; Wang, D. Formation control for multi-robot systems with collision avoidance. Int. J. Control 2019, 92, 2223–2234. [Google Scholar] [CrossRef]
- Wang, J.; Han, L.; Dong, X.; Li, Q.; Ren, Z. Distributed sliding mode control for time-varying formation tracking of multi-UAV system with a dynamic leader. Aerosp. Sci. Technol. 2021, 111, 106549. [Google Scholar] [CrossRef]
- Oh, K.-K.; Park, M.-C.; Ahn, H.-S. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Cox, I.J., Wilfong, G.T., Eds.; Springer: New York, NY, USA, 1986; Volume 5, pp. 396–404. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Do, K.D. Formation Tracking Control of Unicycle-Type Mobile Robots with Limited Sensing Ranges. IEEE Trans. Control Syst. Technol. 2008, 16, 527–538. [Google Scholar] [CrossRef]
- Shi, Q.; Li, T.; Li, J.; Chen, C.P.; Xiao, Y.; Shan, Q. Adaptive leader-following formation control with collision avoidance for a class of second-order nonlinear multi-agent systems. Neurocomputing 2019, 350, 282–290. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, P.; Zhang, F.; Zhao, Y. Distributed formation control using artificial potentials and neural network for constrained multiagent systems. IEEE Trans. Control Syst. Technol. 2018, 28, 697–704. [Google Scholar] [CrossRef]
- Yan, T.; Xu, X.; Li, Z.; Li, E. Flocking of multi-agent system with dynamic topology by pinning control. IET Control Theory Appl. 2020, 14, 3374–3381. [Google Scholar] [CrossRef]
- Tanner, H.G.; Jadbabaie, A.; Pappas, G.J. Flocking in Fixed and Switching Networks. IEEE Trans. Autom. Control 2007, 52, 863–868. [Google Scholar] [CrossRef]
- Mondal, A.; Behera, L.; Sahoo, S.R.; Shukla, A. A novel multi-agent formation control law with collision avoidance. IEEE/CAA J. Autom. Sin. 2017, 4, 558–568. [Google Scholar] [CrossRef]
- Mondal, A.; Bhowmick, C.; Behera, L.; Jamshidi, M. Trajectory tracking by multiple agents in formation with collision avoidance and connectivity assurance. IEEE Syst. J. 2017, 12, 2449–2460. [Google Scholar] [CrossRef]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H.; Shao, X. An Improved Artificial Potential Field Method for Path Planning and Formation Control of the Multi-UAV Systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1129–1133. [Google Scholar] [CrossRef]
- Shou, Y.; Xu, B.; Lu, H.; Zhang, A.; Mei, T. Finite-time formation control and obstacle avoidance of multi-agent system with application. Int. J. Robust Nonlinear Control 2022, 32, 2883–2901. [Google Scholar] [CrossRef]
- González-Sierra, J.; Dzul, A.; Ríos, H. Robust sliding-mode formation control and collision avoidance via repulsive vector fields for a group of Quad-Rotors. Int. J. Syst. Sci. 2019, 50, 1483–1500. [Google Scholar] [CrossRef]
- Liu, Y.; Passino, K.; Polycarpou, M. Stability analysis of M-dimensional asynchronous swarms with a fixed communication topology. IEEE Trans. Autom. Control 2003, 48, 76–95. [Google Scholar] [CrossRef]
- Li, D.; Zhang, W.; He, W.; Li, C.; Ge, S.S. Two-Layer Distributed Formation-Containment Control of Multiple Euler–Lagrange Systems by Output Feedback. IEEE Trans. Cybern. 2018, 49, 675–687. [Google Scholar] [CrossRef] [PubMed]
- Trejo, J.A.V.; Rotondo, D.; Theilliol, D.; Medina, M.A. Observer-based quadratic boundedness leader-following control for multi-agent systems. Int. J. Control 2022, 1–10. [Google Scholar] [CrossRef]
- Xiong, T.; Gu, Z. Observer-based adaptive fixed-time formation control for multi-agent systems with unknown uncertainties. Neurocomputing 2021, 423, 506–517. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Valavanis, K.P.; Lewis, F.L. Fault-Tolerant Formation Control for Heterogeneous Vehicles Via Reinforcement Learning. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 2796–2806. [Google Scholar] [CrossRef]
- Dong, X.; Zhou, Y.; Ren, Z.; Zhong, Y. Time-Varying Formation Tracking for Second-Order Multi-Agent Systems Subjected to Switching Topologies with Application to Quadrotor Formation Flying. IEEE Trans. Ind. Electron. 2016, 64, 5014–5024. [Google Scholar] [CrossRef]
- Han, T.; Lin, Z.; Zheng, R.; Fu, M. A Barycentric Coordinate-Based Approach to Formation Control Under Directed and Switching Sensing Graphs. IEEE Trans. Cybern. 2017, 48, 1202–1215. [Google Scholar] [CrossRef] [PubMed]
- Zavlanos, M.M.; Pappas, G.J. Potential Fields for Maintaining Connectivity of Mobile Networks. IEEE Trans. Robot. 2007, 23, 812–816. [Google Scholar] [CrossRef]
- Li, X.; Sun, D.; Yang, J. A bounded controller for multirobot navigation while maintaining network connectivity in the presence of obstacles. Automatica 2013, 49, 285–292. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, C.; Cai, X.; Li, Y.; Xu, L. Output-feedback formation tracking control of networked nonholonomic multi-robots with connectivity preservation and collision avoidance. Neurocomputing 2020, 414, 267–277. [Google Scholar] [CrossRef]
- Fu, J.; Wen, G.; Yu, X.; Wu, Z.-G. Distributed Formation Navigation of Constrained Second-Order Multiagent Systems With Collision Avoidance and Connectivity Maintenance. IEEE Trans. Cybern. 2020, 52, 2149–2162. [Google Scholar] [CrossRef]
- Dong, Y.; Huang, J. Flocking with connectivity preservation of multiple double integrator systems subject to external disturbances by a distributed control law. Automatica 2015, 55, 197–203. [Google Scholar] [CrossRef]
- Dong, Y.; Su, Y.; Liu, Y.; Xu, S. An internal model approach for multi-agent rendezvous and connectivity preservation with nonlinear dynamics. Automatica 2018, 89, 300–307. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Li, T.; Han, M. Output-Feedback Cooperative Formation Maneuvering of Autonomous Surface Vehicles with Connectivity Preservation and Collision Avoidance. IEEE Trans. Cybern. 2019, 50, 2527–2535. [Google Scholar] [CrossRef] [PubMed]
- Cong, Y.; Du, H.; Jin, Q.; Zhu, W.; Lin, X. Formation control for multiquadrotor aircraft: Connectivity preserving and collision avoidance. Int. J. Robust Nonlinear Control 2020, 30, 2352–2366. [Google Scholar] [CrossRef]
- Filotheou, A.; Nikou, A.; Dimarogonas, D.V. Robust decentralised navigation of multi-agent systems with collision avoidance and connectivity maintenance using model predictive controllers. Int. J. Control 2020, 93, 1470–1484. [Google Scholar] [CrossRef]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-Varying Formation Control for Unmanned Aerial Vehicles: Theories and Applications. IEEE Trans. Control Syst. Technol. 2014, 23, 340–348. [Google Scholar] [CrossRef]
- Biggs, N.N.; Biggs, L.; Norman, B. Algebraic Graph Theory, 2nd ed.; Cambridge university press: Cambridge, UK, 1993; pp. 7–13. [Google Scholar]
- Caruso, M.J. Applications of magnetic sensors for low cost compass systems. In Proceedings of the IEEE Position Location and Navigation Symposium (Cat. No. 00CH37062), San Diego, CA, USA, 13–16 March 2002; pp. 177–184. [Google Scholar] [CrossRef]
- Khalil, H.K. Lyapunov Stability. In Nonlinear System, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2002; Volume 3, pp. 97–154. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, Y.; Huang, X.; Yang, B.; Geng, F.; Wang, B.; Hao, M.; Li, S. Formation Tracking Control for Multi-Agent Systems with Collision Avoidance and Connectivity Maintenance. Drones 2022, 6, 419. https://doi.org/10.3390/drones6120419
Qiao Y, Huang X, Yang B, Geng F, Wang B, Hao M, Li S. Formation Tracking Control for Multi-Agent Systems with Collision Avoidance and Connectivity Maintenance. Drones. 2022; 6(12):419. https://doi.org/10.3390/drones6120419
Chicago/Turabian StyleQiao, Yitao, Xuxing Huang, Bin Yang, Feilong Geng, Bingheng Wang, Mingrui Hao, and Shuang Li. 2022. "Formation Tracking Control for Multi-Agent Systems with Collision Avoidance and Connectivity Maintenance" Drones 6, no. 12: 419. https://doi.org/10.3390/drones6120419
APA StyleQiao, Y., Huang, X., Yang, B., Geng, F., Wang, B., Hao, M., & Li, S. (2022). Formation Tracking Control for Multi-Agent Systems with Collision Avoidance and Connectivity Maintenance. Drones, 6(12), 419. https://doi.org/10.3390/drones6120419