

Vegetation Cover Estimation in Semi-Arid Shrublands after Prescribed Burning: Field-Ground and Drone Image Comparison

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Site
2.2. Experimental Design
2.3. Vegetation Monitoring
2.4. Drone Flights and Image Processing
2.5. Statistical Analysis
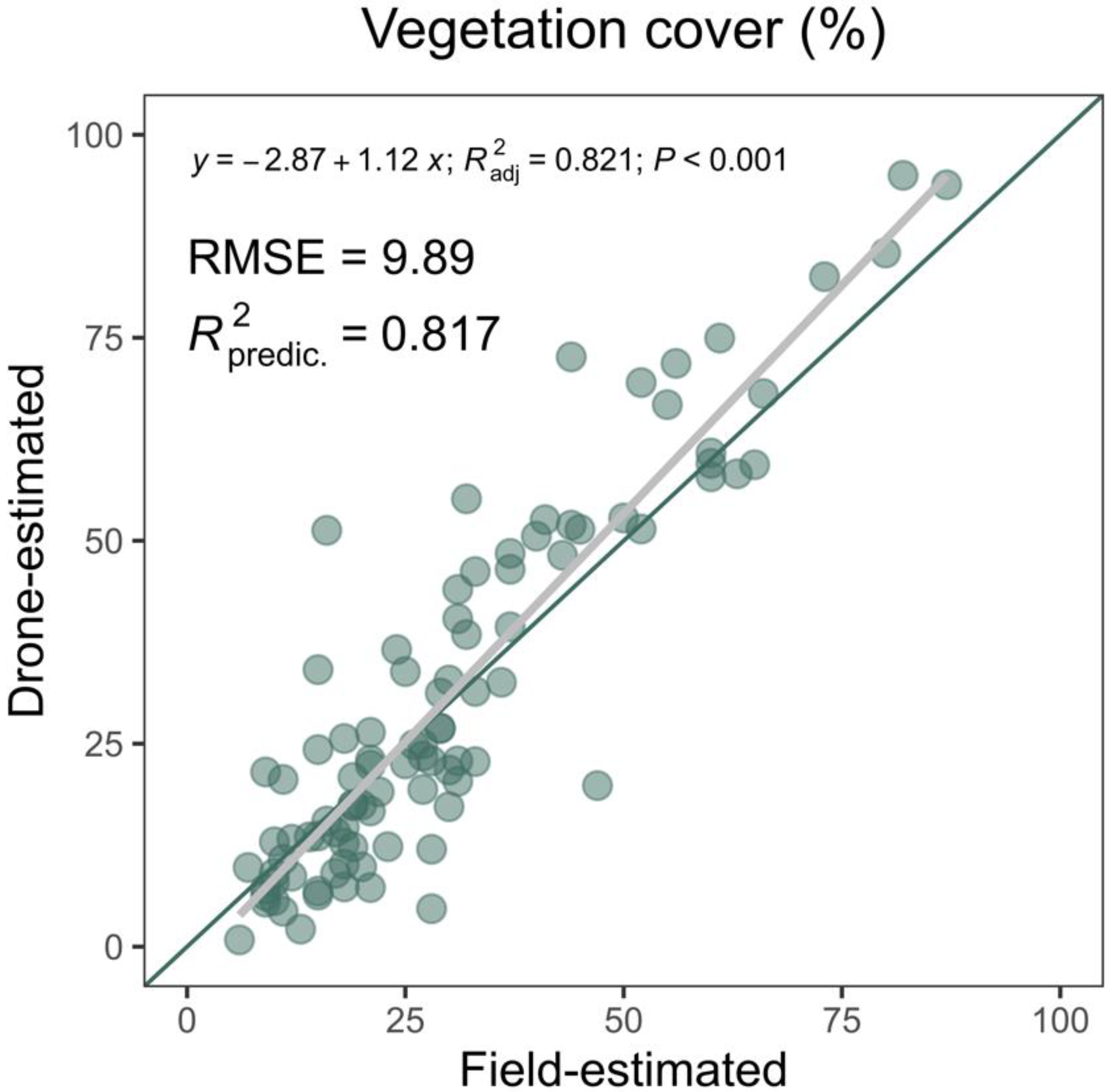
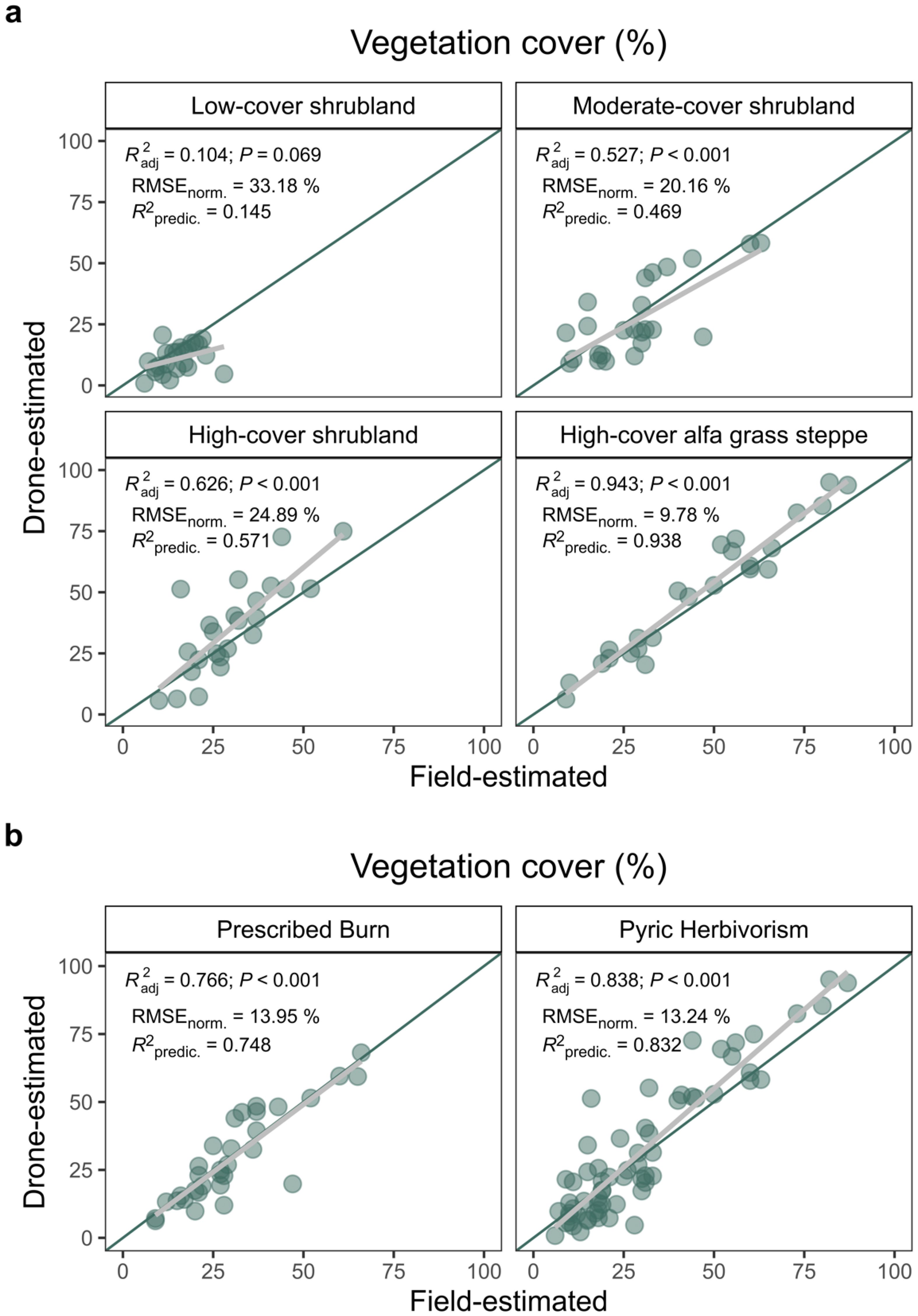
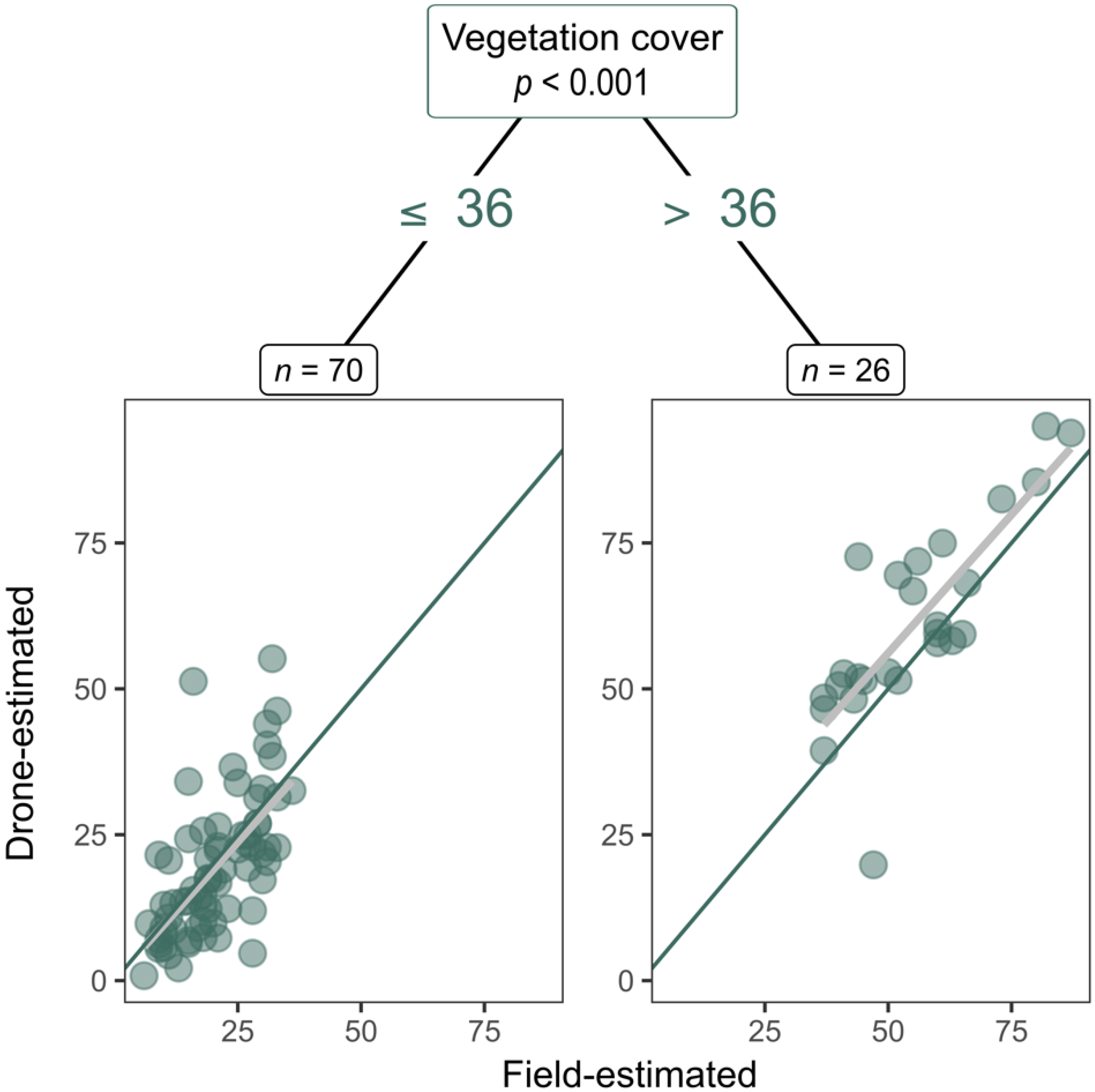
3. Results
4. Discussion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, W.; Sakai, T.; Moriya, K.; Koyama, L.; Cao, C. Estimation of Vegetation Coverage in Semi-Arid Sandy Land Based on Multivariate Statistical Modeling Using Remote Sensing Data. Environ. Model. Assess. 2013, 18, 547–558. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, H.; Fu, Y.; Niu, H.; Yang, Y.; Zhang, B. Fractional Vegetation Cover Estimation of Different Vegetation Types in the Qaidam Basin. Sustainability 2019, 11, 864. [Google Scholar] [CrossRef]
- Zhang, J.; Okin, G.S.; Zhou, B.; Karl, J.W. UAV-derived Imagery for Vegetation Structure Estimation in Rangelands: Validation and Application. Ecosphere 2021, 12, e03830. [Google Scholar] [CrossRef]
- Gaitán, J.J.; Oliva, G.E.; Bran, D.E.; Maestre, F.T.; Aguiar, M.R.; Jobbágy, E.G.; Buono, G.G.; Ferrante, D.; Nakamatsu, V.B.; Ciari, G.; et al. Vegetation Structure Is as Important as Climate for Explaining Ecosystem Function across Patagonian Rangelands. J. Ecol. 2014, 102, 1419–1428. [Google Scholar] [CrossRef]
- Elzinga, C.L.; Salzer, D.W.; Willoughby, J.W.; Gibbs, J.P. (Eds.) Monitoring Plant and Animal Populations; Wiley-Blackwell: Great Britain, UK, 2001; ISBN 978-0-632-04442-9. [Google Scholar]
- Chen, Z.; Chen, W.; Leblance, S.G.; Henry, G.H.R. Digital Photograph Analysis for Measuring Percent Plant Cover in the Arctic. Arctic 2010, 63, 315–326. [Google Scholar] [CrossRef]
- Louhaichi, M.; Hassan, S.; Clifton, K.; Johnson, D.E. A Reliable and Non-Destructive Method for Estimating Forage Shrub Cover and Biomass in Arid Environments Using Digital Vegetation Charting Technique. Agroforest. Syst. 2018, 92, 1341–1352. [Google Scholar] [CrossRef]
- Luscier, J.D.; Thompson, W.L.; Wilson, J.M.; Gorham, B.E.; Dragut, L.D. Using Digital Photographs and Object-Based Image Analysis to Estimate Percent Ground Cover in Vegetation Plots. Front. Ecol. Environ. 2006, 4, 408–413. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, J.; Cao, C.; Tian, H. Shrub Biomass Estimation in Semi-Arid Sandland Ecosystem Based on Remote Sensing Technology. Glob. Ecol. Conserv. 2018, 16, e00479. [Google Scholar] [CrossRef]
- Assmann, J.J.; Kerby, J.T.; Cunliffe, A.M.; Myers-Smith, I.H. Vegetation Monitoring Using Multispectral Sensors—Best Practices and Lessons Learned from High Latitudes. J. Unmanned Veh. Sys. 2019, 7, 54–75. [Google Scholar] [CrossRef]
- Stojanova, D.; Panov, P.; Gjorgjioski, V.; Kobler, A.; Džeroski, S. Estimating Vegetation Height and Canopy Cover from Remotely Sensed Data with Machine Learning. Ecol. Inform. 2010, 5, 256–266. [Google Scholar] [CrossRef]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; San Miguel, J.; Tanase, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical Background and Current Developments for Mapping Burned Area from Satellite Earth Observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Huang, R.; Zhang, X.; Chan, D.; Kondragunta, S.; Russell, A.G.; Odman, M.T. Burned Area Comparisons Between Prescribed Burning Permits in Southeastern United States and Two Satellite-Derived Products. J. Geophys. Res. Atmos. 2018, 123, 4746–4757. [Google Scholar] [CrossRef]
- Amiri, F. Using Remote Sensing Data for Vegetation Cover Assessment in Semi-Arid Rangeland of Center Province of Iran. World Appl. Sci. J. 2010, 10, 1537–1546. [Google Scholar]
- Jia, K.; Li, Y.; Liang, S.; Wei, X.; Yao, Y. Combining Estimation of Green Vegetation Fraction in an Arid Region from Landsat 7 ETM+ Data. Remote Sens. 2017, 9, 1121. [Google Scholar] [CrossRef]
- Jiapaer, G.; Chen, X.; Bao, A. A Comparison of Methods for Estimating Fractional Vegetation Cover in Arid Regions. Agric. For. Meteorol. 2011, 151, 1698–1710. [Google Scholar] [CrossRef]
- Purevdorj, T.; Tateishi, R.; Ishiyama, T.; Honda, Y. Relationships between Percent Vegetation Cover and Vegetation Indices. Int. J. Remote Sens. 1998, 19, 3519–3535. [Google Scholar] [CrossRef]
- Zhang, X.; Yan, G.; Li, Q.; Li, Z.-L.; Wan, H.; Guo, Z. Evaluating the Fraction of Vegetation Cover Based on NDVI Spatial Scale Correction Model. Int. J. Remote Sens. 2006, 27, 5359–5372. [Google Scholar] [CrossRef]
- Blanco-Sacristán, J.; Panigada, C.; Gentili, R.; Tagliabue, G.; Garzonio, R.; Martín, M.P.; Ladrón de Guevara, M.; Colombo, R.; Dowling, T.P.F.; Rossini, M. UAV RGB, Thermal Infrared and Multispectral Imagery Used to Investigate the Control of Terrain on the Spatial Distribution of Dryland Biocrust. Earth Surf. Process. Landf. 2021, 46, 2466–2484. [Google Scholar] [CrossRef]
- Díaz-Delgado, R.; Mücher, S. Editorial of Special Issue “Drones for Biodiversity Conservation and Ecological Monitoring”. Drones 2019, 3, 47. [Google Scholar] [CrossRef]
- Gonzalez Musso, R.F.; Oddi, F.J.; Goldenberg, M.G.; Garibaldi, L.A. Applying Unmanned Aerial Vehicles (UAVs) to Map Shrubland Structural Attributes in Northern Patagonia, Argentina. Can. J. For. Res. 2020, 50, 615–623. [Google Scholar] [CrossRef]
- Fernandes, P.M.; Davies, G.M.; Ascoli, D.; Fernández, C.; Moreira, F.; Rigolot, E.; Stoof, C.R.; Vega, J.A.; Molina, D. Prescribed Burning in Southern Europe: Developing Fire Management in a Dynamic Landscape. Front. Ecol. Environ. 2013, 11, e4–e14. [Google Scholar] [CrossRef]
- Fuhlendorf, S.D.; Engle, D.M.; Kerby, J.; Hamilton, R. Pyric Herbivory: Rewilding Landscapes through the Recoupling of Fire and Grazing. Conserv. Biol. 2009, 23, 588–598. [Google Scholar] [CrossRef] [PubMed]
- Pausas, J.G.; Llovet, J.; Rodrigo, A.; Vallejo, R. Are Wildfires a Disaster in the Mediterranean Basin?—A Review. Int. J. Wildland Fire 2008, 17, 713. [Google Scholar] [CrossRef]
- Fuhlendorf, S.D.; Limb, R.F.; Engle, D.M.; Miller, R.F. Assessment of Prescribed Fire as a Conservation Practice. In Conservation Benefits of Rangeland Practices: Assessment, Recommendations, and Knowledge Gaps; Briske, D.D., Ed.; United States Department of Agriculture, Natural Resources Conservation Service: Washington, DC, USA, 2011. [Google Scholar]
- Aguilar Ruiz, J.; Simón Torres, M.; Fernández García, J.; García Fernández, I.; Milán Martin, J. Proyecto LUCDEME. Mapa de Suelos. Escala 1:100.000. FIÑANA-1012; Ministerio de Agricultura, Pesca y Alimentación, ICONA, Universidad de Granada: Granada, Spain, 1987. [Google Scholar]
- Navarro Cerrillo, R.M.; Carreras Egaña, C. Los Territorios Del Agua: Sierra de Filabres. In El agua Domesticada: Los Paisajes de los Regadíos de Montaña en Andalucía; Guzmán Álvarez, J.R., Navarro Cerrillo, R.M., Eds.; Agencia Andaluza del Agua. Junta de Andalucía: Sevilla, Spain, 2010; pp. 385–401. ISBN 978-84-92807-48-2. [Google Scholar]
- Peñas, J.; Cabello, J.; Oyonarte, C.; Mota, J.F. Variación Altitudinal y Diversidad Vegetal En Matorrales: Sierra de Los Filabres (Almería, España). ABM 1995, 20, 133–142. [Google Scholar] [CrossRef]
- Canals, R.M.; Múgica, L.; San Emeterio, L.; Sarries Martínez, M.; Sáez Istillart, J.L.; Echeverria Echavarren, L.; Lizarza, J.; Uharte, O.; Yaben, A.; Pérez de Muniaín, A. Open2Preserve: Preservación de Espacios Abiertos de Montaña. Navar. Agrícola 2018, 231, 30–32. [Google Scholar]
- Canals, R.M. Landscape in Motion: Revisiting the Role of Key Disturbances in the Preservation of Mountain Ecosystems. CIG 2019, 45, 515. [Google Scholar] [CrossRef]
- Davies, K.W.; Wollstein, K.; Dragt, B.; O’Connor, C. Grazing Management to Reduce Wildfire Risk in Invasive Annual Grass Prone Sagebrush Communities. Rangelands 2022, 44, 194–199. [Google Scholar] [CrossRef]
- Krebs, C.J. Ecological Methodology, 2nd ed.; Benjamin/Cummings: Menlo Park, CA, USA, 1999; ISBN 978-0-321-02173-1. [Google Scholar]
- Castroviejo, S. (Ed.) Flora Ibérica; Real Jardín Botánico, CSIC: Madrid, Spain, 1986; Volumes 1–8, 10–15, 17–18, 21. [Google Scholar]
- Blanca, G.; Cabezudo, B.; Cueto, M.; Salazar, C.; Morales-Torres, C. Flora Vascular de Andalucía Oriental; Universidades de Almería: Granada, Spain; Jaén y Málaga: Granada, Spain, 2011. [Google Scholar]
- Carvajal-Ramírez, F.; Serrano, J.M.P.R.; Agüera-Vega, F.; Martínez-Carricondo, P. A Comparative Analysis of Phytovolume Estimation Methods Based on UAV-Photogrammetry and Multispectral Imagery in a Mediterranean Forest. Remote Sens. 2019, 11, 2579. [Google Scholar] [CrossRef]
- Ground Station Software | UgCS PC Mission Planning. Available online: https://www.ugcs.com/ (accessed on 20 September 2022).
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Pérez-Porras, F.-J. Assessment of UAV-Photogrammetric Mapping Accuracy Based on Variation of Ground Control Points. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- Micasense RedEdge-MX—MicaSense. Available online: https://ageagle.com/drone-sensors/rededge-p (accessed on 20 September 2022).
- DJI Zenmuse X7. Available online: https://www.dji.com/es/zenmuse-x7 (accessed on 20 September 2022).
- PIX4D. Available online: www.pix4d.com (accessed on 20 September 2022).
- Ben-Hur, A.; Horn, D.; Siegelmann, H.T.; Vapnik, V. Support Vector Clustering. J. Mach. Learn. Res. 2002, 2, 125–137. [Google Scholar] [CrossRef]
- Dice, L.R. Measures of the Amount of Ecologic Association Between Species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees, 1st ed.; Chapman and Hall/CRC: Boca Raton, FL, USA; London, UK; New York, NY, USA, 1984; ISBN 978-1-315-13947-0. [Google Scholar]
- Zhang, H.; Singer, B.H. Recursive Partitioning and Applications; Springer Series in Statistics; Springer: New York, NY, USA, 2010; ISBN 978-1-4419-6823-4. [Google Scholar]
- Therneau, T.; Atkinson, B. Rpart: Recursive Partitioning and Regression Trees, R package version 4.1.16; 2022. Available online: https://CRAN.R-project.org/package=rpart (accessed on 20 September 2022).
- Bertsimas, D.; Dunn, J. Optimal Classification Trees. Mach. Learn. 2017, 106, 1039–1082. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- Rodríguez-Sánchez, F.; Jackson, C.P.; Hutchins, S.D. Grateful: Facilitate Citation of R Packages, R package version 0.1.5; 2022. Available online: https://github.com/Pakillo/grateful (accessed on 20 September 2022).
- Breckenridge, R.P.; Dakins, M.; Bunting, S.; Harbour, J.L.; White, S. Comparison of Unmanned Aerial Vehicle Platforms for Assessing Vegetation Cover in Sagebrush Steppe Ecosystems. Rangel. Ecol. Manag. 2011, 64, 521–532. [Google Scholar] [CrossRef]
- Gränzig, T.; Fassnacht, F.E.; Kleinschmit, B.; Förster, M. Mapping the Fractional Coverage of the Invasive Shrub Ulex Europaeus with Multi-Temporal Sentinel-2 Imagery Utilizing UAV Orthoimages and a New Spatial Optimization Approach. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102281. [Google Scholar] [CrossRef]
- Booth, D.T.; Cox, S.E.; Meikle, T.; Zuuring, H.R. Ground-Cover Measurements: Assessing Correlation Among Aerial and Ground-Based Methods. Environ. Manag. 2008, 42, 1091–1100. [Google Scholar] [CrossRef]
- van Blerk, J.J.; West, A.G.; Smit, J.; Altwegg, R.; Hoffman, M.T. UAVs Improve Detection of Seasonal Growth Responses during Post-Fire Shrubland Recovery. Landsc. Ecol. 2022. [Google Scholar] [CrossRef]
- Maestre, F.T.; Cortina, J. Insights into Ecosystem Composition and Function in a Sequence of Degraded Semiarid Steppes. Restor. Ecol. 2004, 12, 494–502. [Google Scholar] [CrossRef]
- Maestre, F.T.; Ramírez, D.A.; Cortina, J. Ecología del esparto (Stipa tenacissima L.) y los espartales de la Península Ibérica. Ecosistemas 2007, 16, 111–130. [Google Scholar]
- Flores-de-Santiago, F.; Valderrama-Landeros, L.; Rodríguez-Sobreyra, R.; Flores-Verdugo, F. Assessing the Effect of Flight Altitude and Overlap on Orthoimage Generation for UAV Estimates of Coastal Wetlands. J. Coast. Conserv. 2020, 24, 35. [Google Scholar] [CrossRef]
- Swayze, N.C.; Tinkham, W.T.; Creasy, M.B.; Vogeler, J.C.; Hoffman, C.M.; Hudak, A.T. Influence of UAS Flight Altitude and Speed on Aboveground Biomass Prediction. Remote Sens. 2022, 14, 1989. [Google Scholar] [CrossRef]
- DiMaggio, A.M.; Perotto-Baldivieso, H.L.; Ortega, S.J.A.; Walther, C.; Labrador-Rodriguez, K.N.; Page, M.T.; Martinez, J.d.l.L.; Rideout-Hanzak, S.; Hedquist, B.C.; Wester, D.B. A Pilot Study to Estimate Forage Mass from Unmanned Aerial Vehicles in a Semi-Arid Rangeland. Remote Sens. 2020, 12, 2431. [Google Scholar] [CrossRef]
- Kattenborn, T.; Lopatin, J.; Förster, M.; Braun, A.C.; Fassnacht, F.E. UAV Data as Alternative to Field Sampling to Map Woody Invasive Species Based on Combined Sentinel-1 and Sentinel-2 Data. Remote Sens. Environ. 2019, 227, 61–73. [Google Scholar] [CrossRef]
- Riihimäki, H.; Luoto, M.; Heiskanen, J. Estimating Fractional Cover of Tundra Vegetation at Multiple Scales Using Unmanned Aerial Systems and Optical Satellite Data. Remote Sens. Environ. 2019, 224, 119–132. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Treatment | Fire Date | Surface (ha) | Lat/Long 1 | Slope 2 (%) |
|---|---|---|---|---|---|
| PB | Prescribed burning (PB) | 18 December 2018 | 3.41 | 37°18′35.25″ N 2°36′18.00″ W | 12.0–66.6 |
| PHAutumn | Pyric herbivory (PH) | 18 December 2018 | 5.61 | 37°18′33.83″ N 2°36′7.49″ W | 17.5–82.3 |
| PHSpring | Pyric herbivory (PH) | 7 May 2019 | 2.85 | 37°18′41.06″ N 2°36′5.76″ W | 12.0–82.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Luque, A.J.; Ramos-Font, M.E.; Tognetti Barbieri, M.J.; Tarragona Pérez, C.; Calvo Renta, G.; Robles Cruz, A.B. Vegetation Cover Estimation in Semi-Arid Shrublands after Prescribed Burning: Field-Ground and Drone Image Comparison. Drones 2022, 6, 370. https://doi.org/10.3390/drones6110370
Pérez-Luque AJ, Ramos-Font ME, Tognetti Barbieri MJ, Tarragona Pérez C, Calvo Renta G, Robles Cruz AB. Vegetation Cover Estimation in Semi-Arid Shrublands after Prescribed Burning: Field-Ground and Drone Image Comparison. Drones. 2022; 6(11):370. https://doi.org/10.3390/drones6110370
Chicago/Turabian StylePérez-Luque, Antonio J., María Eugenia Ramos-Font, Mauro J. Tognetti Barbieri, Carlos Tarragona Pérez, Guillermo Calvo Renta, and Ana Belén Robles Cruz. 2022. "Vegetation Cover Estimation in Semi-Arid Shrublands after Prescribed Burning: Field-Ground and Drone Image Comparison" Drones 6, no. 11: 370. https://doi.org/10.3390/drones6110370
APA StylePérez-Luque, A. J., Ramos-Font, M. E., Tognetti Barbieri, M. J., Tarragona Pérez, C., Calvo Renta, G., & Robles Cruz, A. B. (2022). Vegetation Cover Estimation in Semi-Arid Shrublands after Prescribed Burning: Field-Ground and Drone Image Comparison. Drones, 6(11), 370. https://doi.org/10.3390/drones6110370