
GPS-Spoofing Attack Detection Technology for UAVs Based on Kullback–Leibler Divergence

 ,
,  , ,
, ,
Abstract
:1. Introduction
- Monitoring step changes in the GPS signal level. The changes in the signal level are monitored, recorded and compared with the previous recorded value. Large changes in these dimensions may indicate a spoofing attack [14].
- Controlling the rate of change of the pseudo-range. Any significant and unexpected changes in the values of the pseudo-range may indicate the presence of a spoofing attack [15].
- The main directions of research in the field of anti-spoofing for satellite navigation systems were analyzed;
- We have considered the existing methods of detecting and preventing spoofing attacks on navigation systems.
2. Materials and Methods
2.1. Preliminary Research
2.2. Analysis of Cyber-Physical Parameters and Data Normalization Methods
- UAV flight altitude (ha);
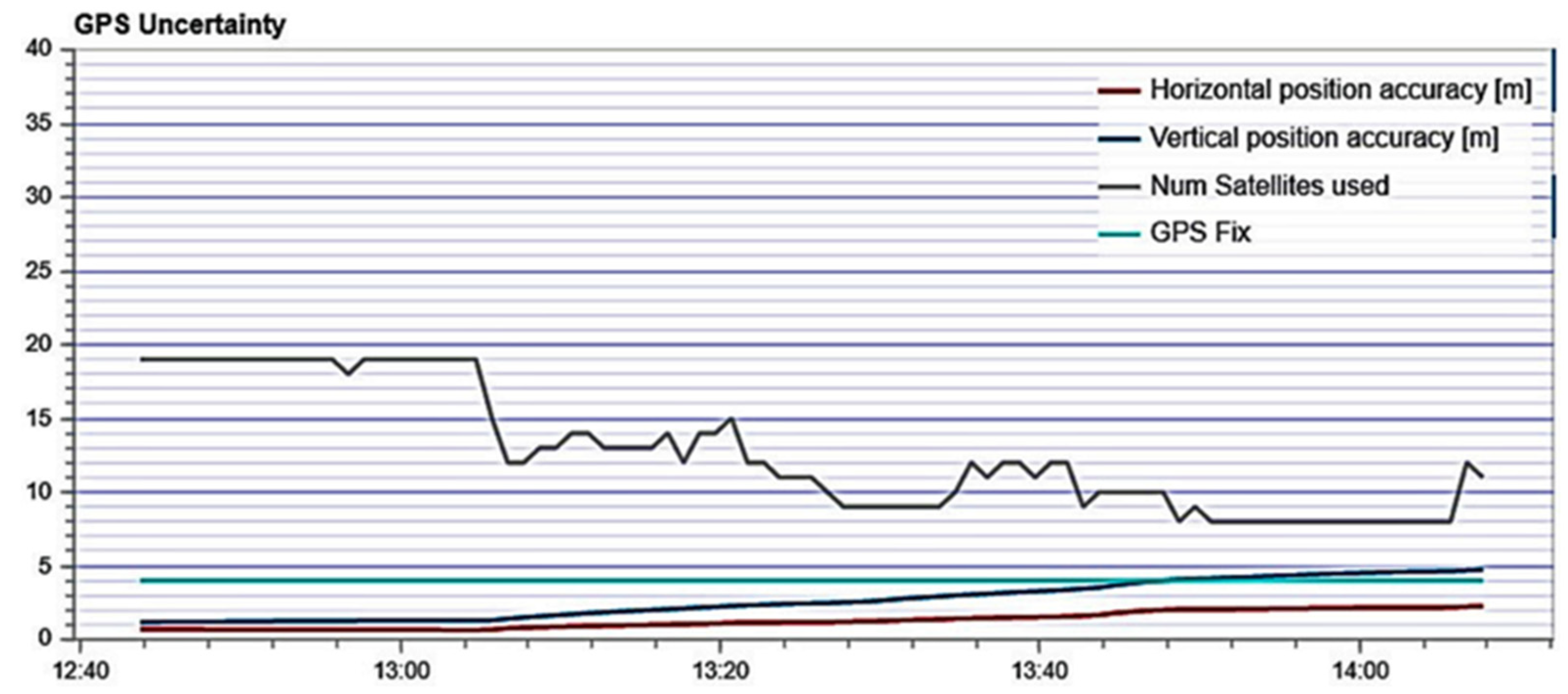
- The number of satellites that the UAV sees (Ns);
- GPS speed (Gs);
- Flight angle (A);
- Latitude (Lat);
- Longitude (Lon);
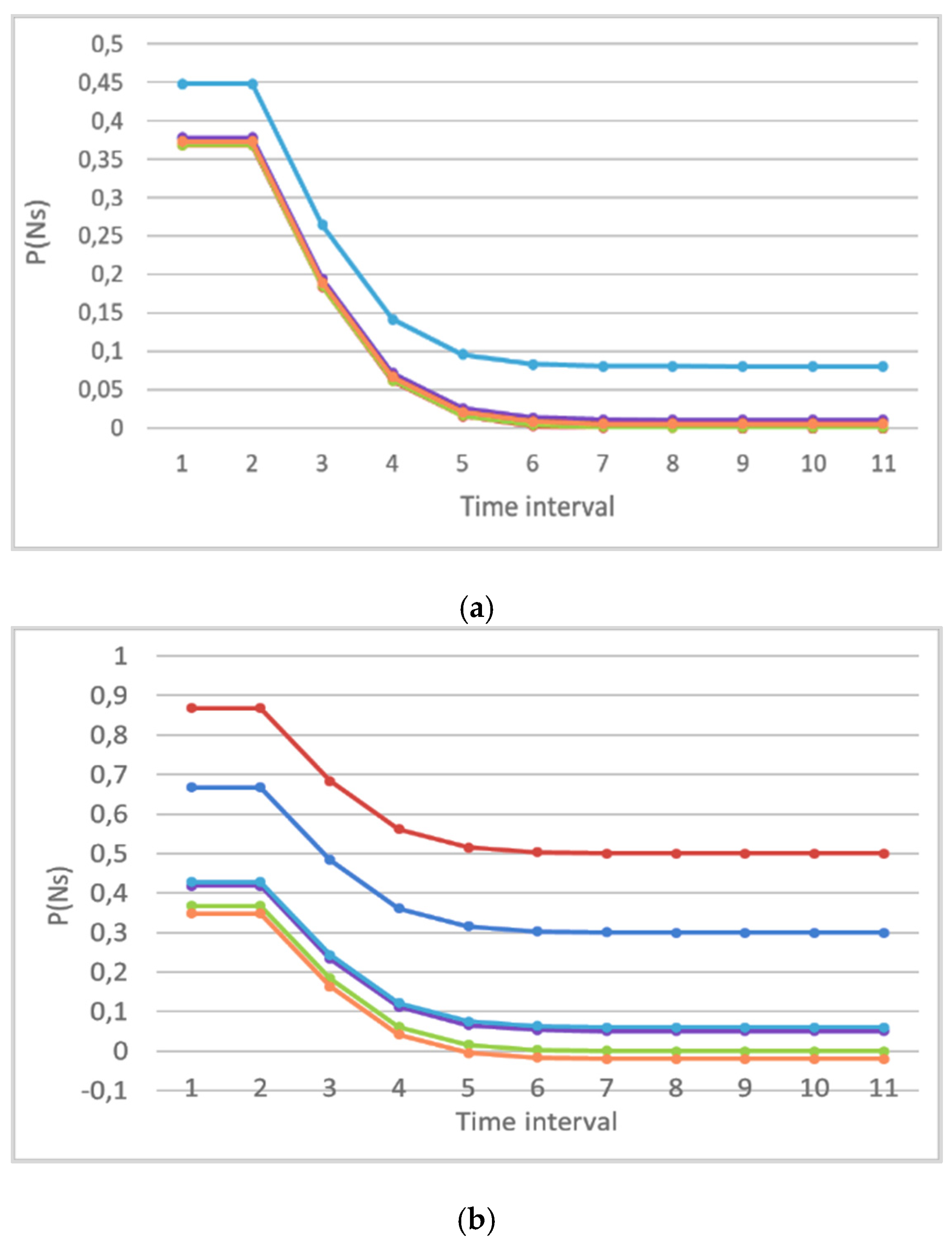
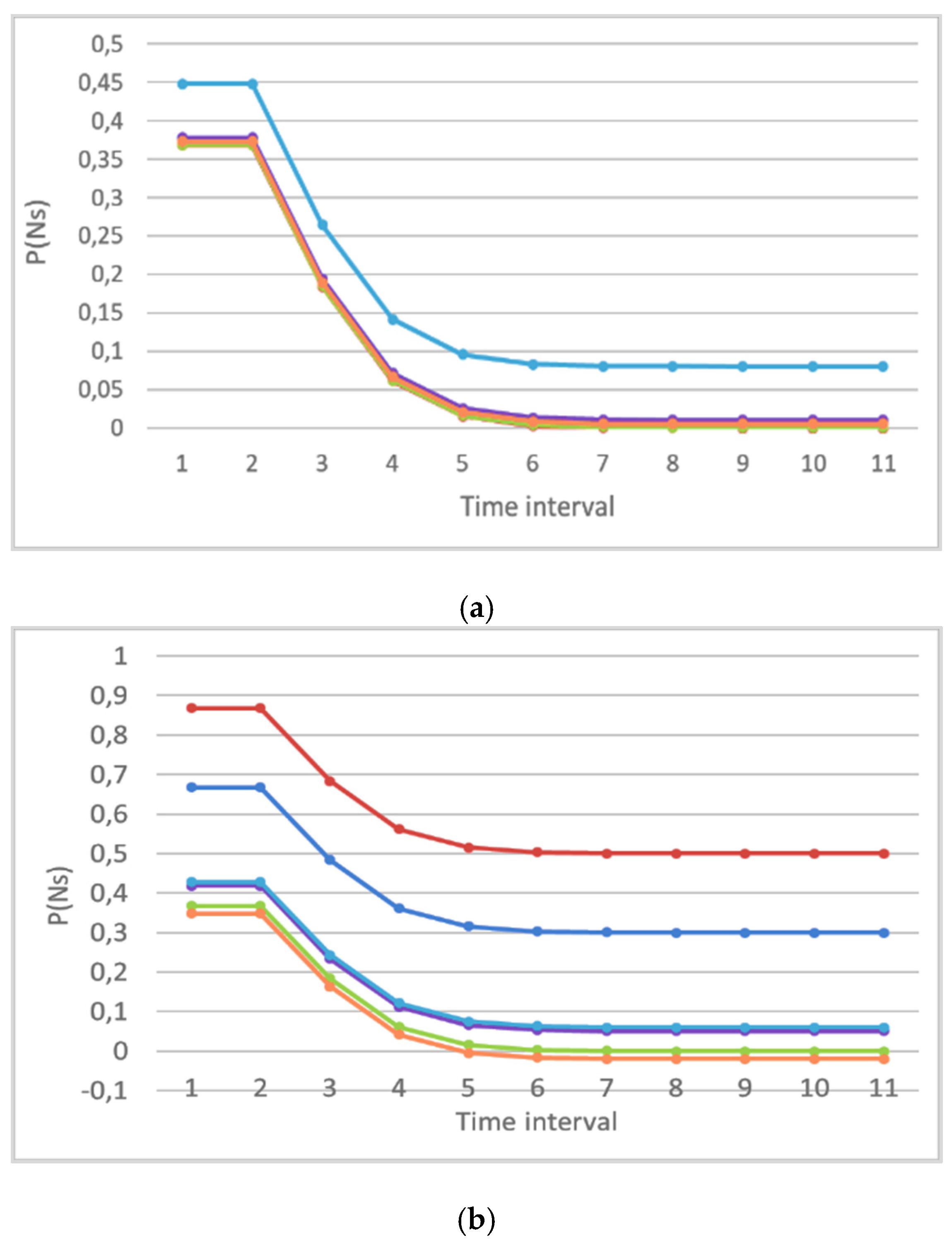
- With the help of appropriate statistics, we can estimate these parameters in the sampled data. Depending on whether the random variable is discrete or continuous, the probability distribution can be either discrete or continuous. In this case, the quantities are discrete.
2.3. Intrusion Detection Method for UAVs
3. Results and Discussion
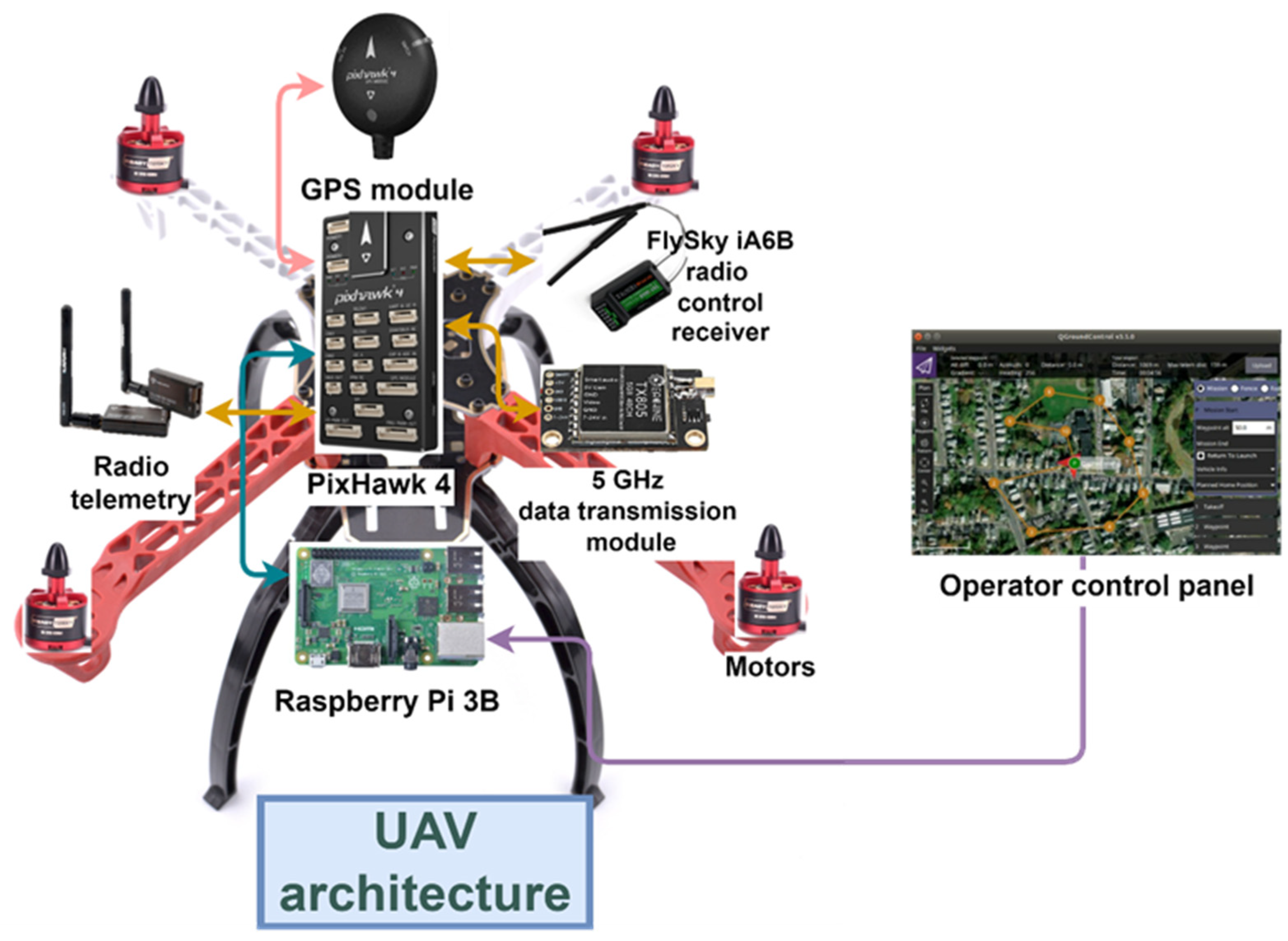
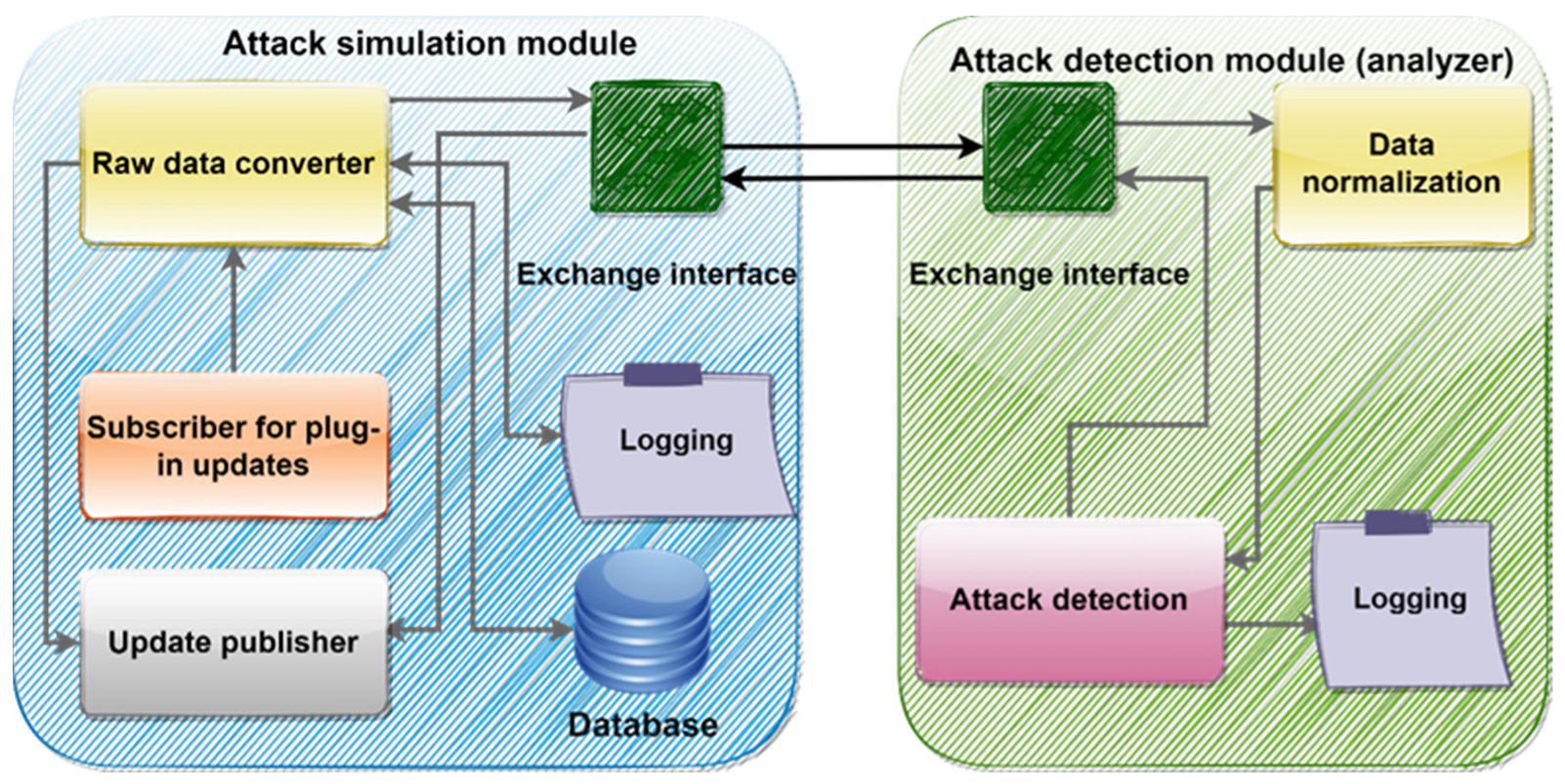
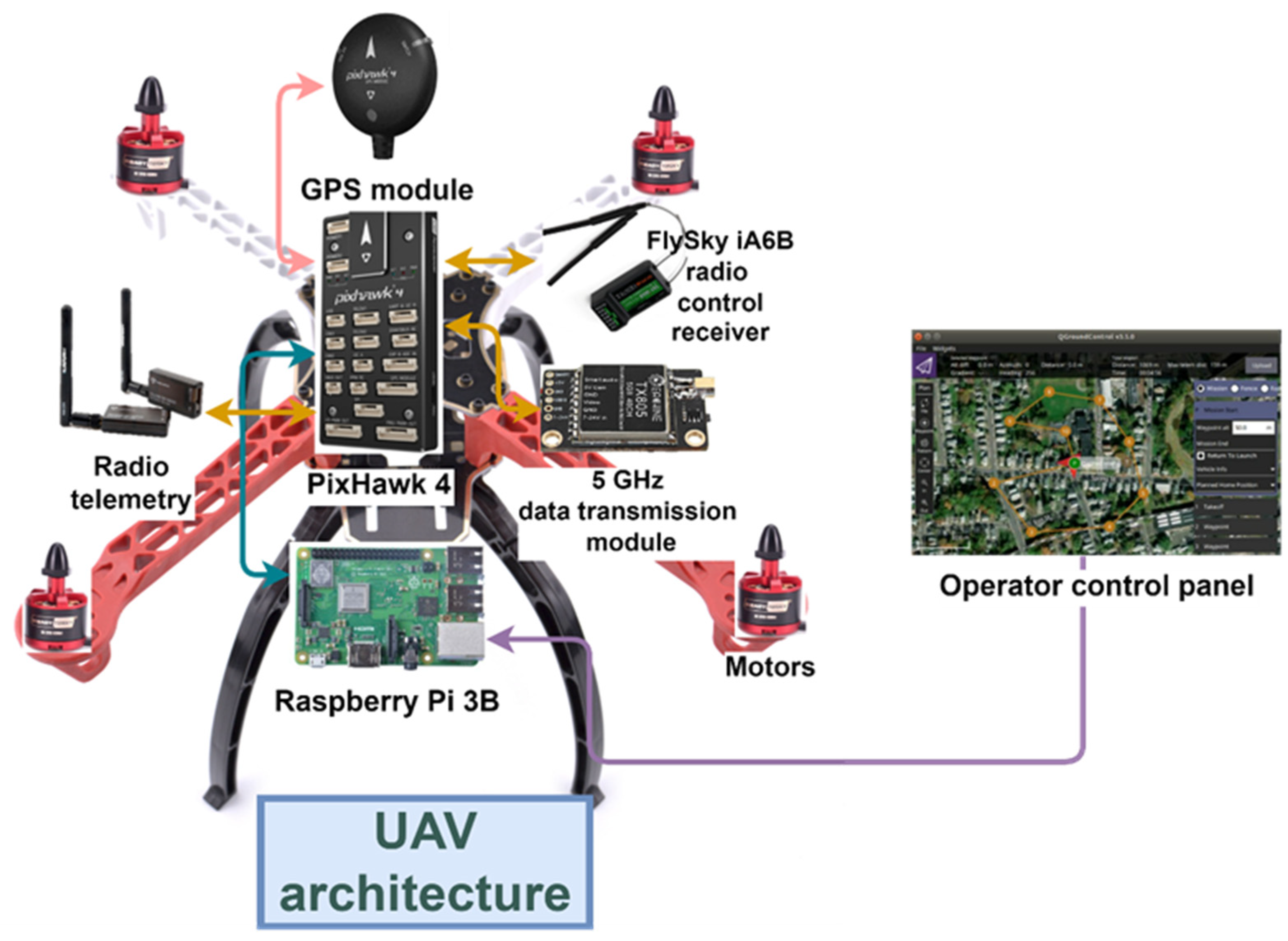
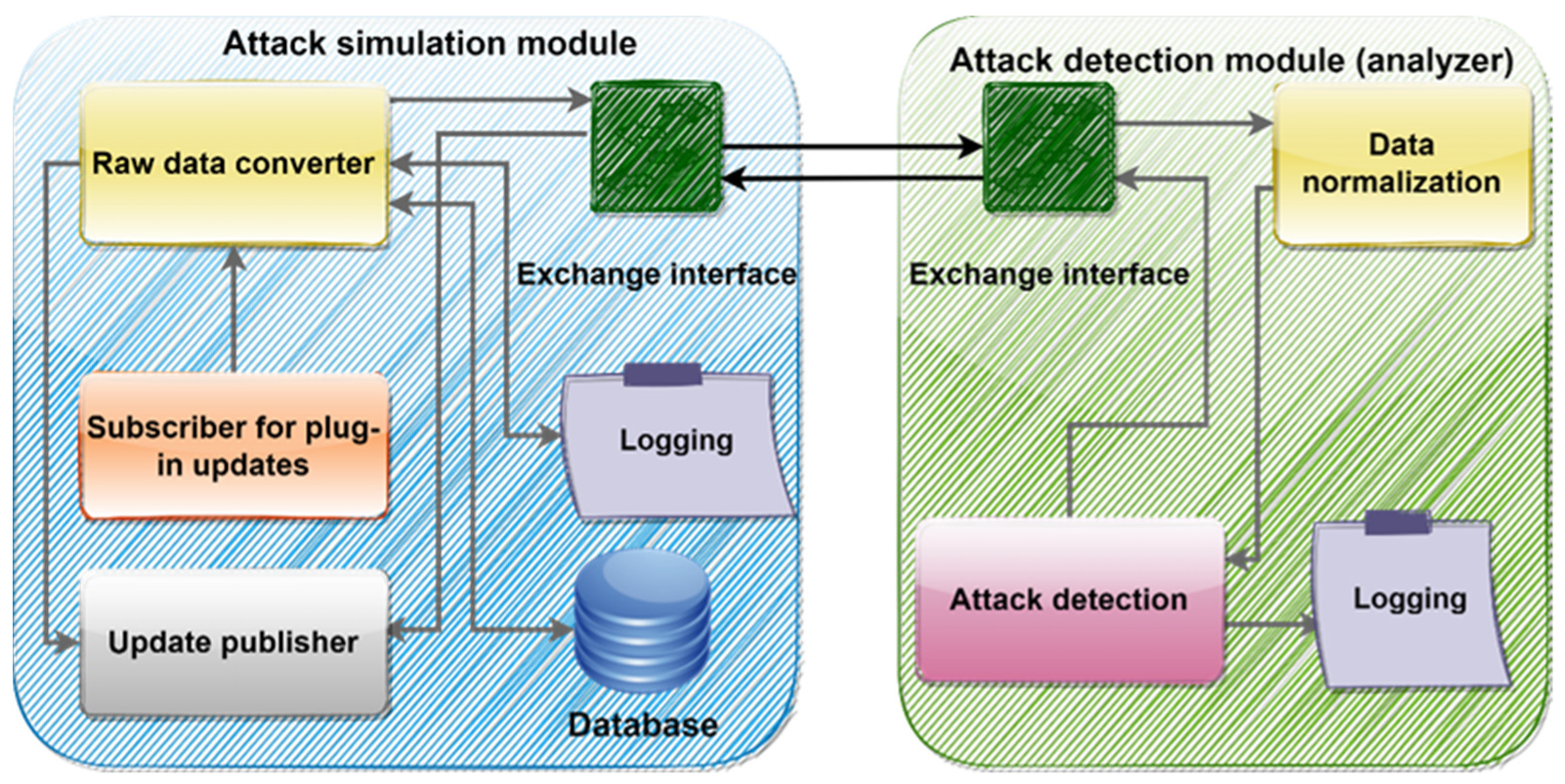
3.1. Development of GPS Anti-Spoofing Technology Components for UAVs
3.2. Experimental Research Methodology
- Timely notification of the start of an attack;
- Accuracy of attack detection;
- The plausibility of the forged attack data;
- The time spent on simulating the data.
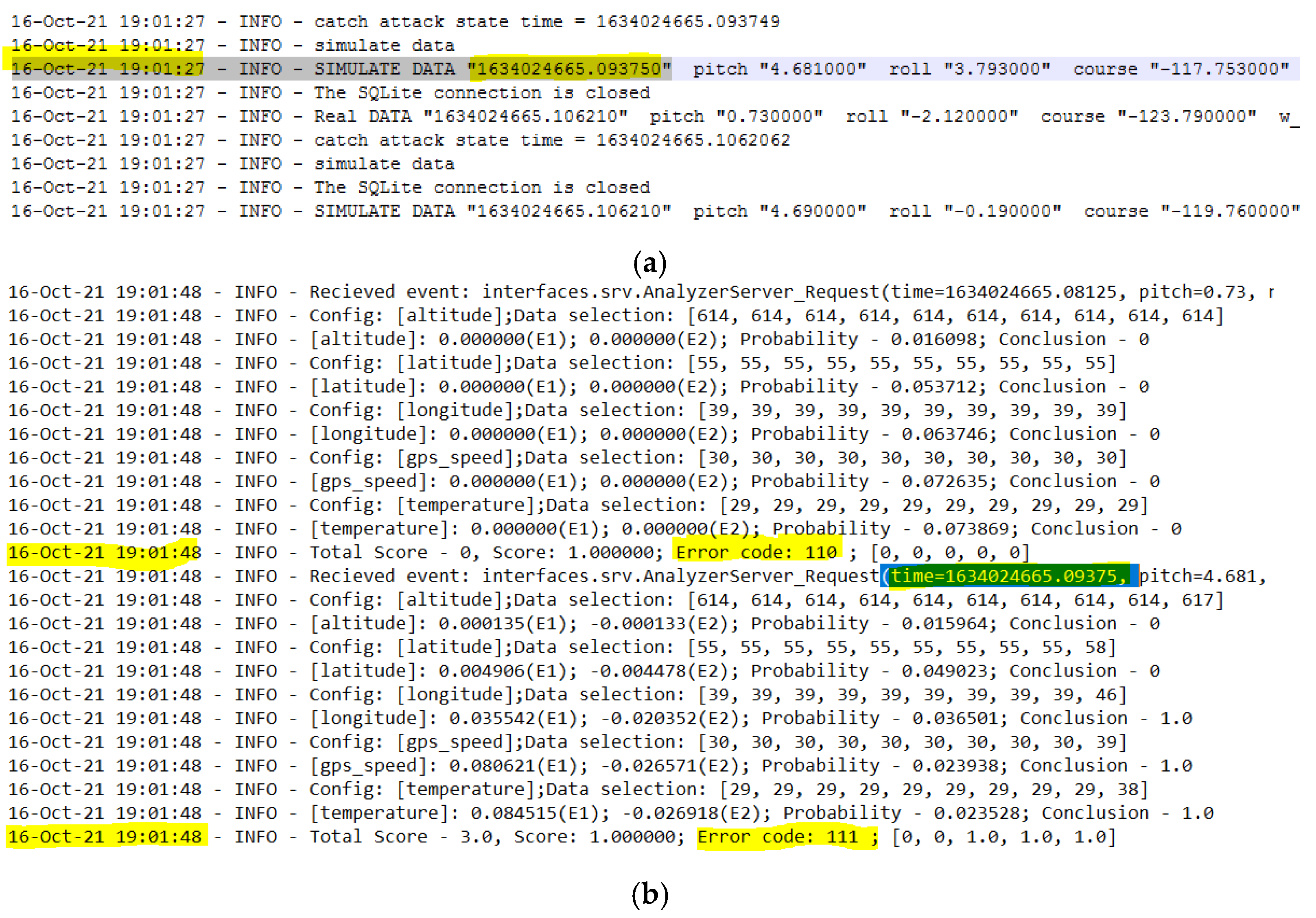
3.3. Experimental Results
4. Conclusions
- The features of spoofing attacks that facilitate their detection and blocking were described, and the following set of features was highlighted: the relative position of the spoofer, variations in the spoofer distance, hardware features of navigation receivers, and the angle of arrival of the signal.
- The main directions of research in the field of anti-spoofing for satellite navigation systems were analyzed, which allowed classifying approaches to detecting and preventing spoofing attacks and highlighting their common features and differences.
- The existing software and hardware solutions for the GPS anti-spoofing problem were described.
- A preliminary study was carried out, which made it possible to form a mathematical apparatus for solving the problem.
- The analysis of parameters and methods of data normalization was carried out, as a result of which a set of cyber-physical parameters was formed that can be used to detect an attack.
- The analysis of the Kullback–Leibler divergence measure for the search for anomalies was carried out, which makes it possible to improve the quality of anomaly detection.
- A new method for detecting attacks based on the parameters of the sensor system of an unmanned vehicle was described, which allows the UAV to detect an attack without the need for prior knowledge about the reference change of sensor values, in real time, autonomously. This method is based on calculating the value of entropy, that is, the difference between the probability distributions of cyber-physical parameters.
- This technology should provide detection of an attack, notifying the operator and the necessary subsystems of the UAV about the fact of an attack. After notification of an attack, UAV control mechanisms must ensure that measures are taken to counter the attack.
- A feature of this technology is that, to detect an attack, there is no need to establish and record changes in indicators during normal operation, the system must ensure recording of anomalies in real time by analyzing the degree of change in indicators obtained over the past period of time and for the current period of time.
- To implement the technology, the following tasks must be completed: an interface has been developed for collecting data on the state of the navigation system, which is necessary to detect a change in its state, from the flight controller or any other subsystem that can provide the required data set, the format and types of values transmitted parameters, the possibility of implementing a GPS spoofing attack on the simulation model is provided, its effective parameters are determined; the possibility of transmitting a signal about the fact of an attack on the ground control point and on-board computer of the UAV in the established format was provided.
- Our method, in comparison with analogs, gives a higher accuracy of attack detection. In addition, it is easier to implement and does not require a large amount of data to train a neural network or create a decision-making system. For example, Support Vector Machines provide detection accuracy of up to 80%. The deep learning method together with the support vector machine has a detection accuracy of up to 90% [41]. Our attack detection method for a group of UAVs provides up to 96% accuracy of attack detection, but at the same time produces 3.5% false positives. In addition, in our scheme, UAVs do not operate autonomously, and the method works at the level of UAVs and ground stations to detect harmful anomalies.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, C.; Cheong, J.W.; Dempster, A.G.; Zhao, H.; Feng, W. GNSS spoofing detection by means of signal quality monitoring (SQM) metric combinations. IEEE Access 2018, 6, 66428–66441. [Google Scholar] [CrossRef]
- Han, S.; Luo, D.; Meng, W.; Li, C. Antispoofing RAIM for dual-recursion particle filter of GNSS calculation. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 836–851. [Google Scholar] [CrossRef]
- Kerns, A.J.; Wesson, K.D.; Humphreys, T.E. A blueprint for civil GPS navigation message authentication. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 262–269. [Google Scholar] [CrossRef]
- Afgani, M.; Sinanovic, S.; Haas, H. Hardware implementation of a Kullback-Leibler Divergence based signal anomaly detector. In Proceedings of the 2nd International Symposium on Applied Sciences in Biomedical and Communication Technologies, Bratislava, Slovakia, 24–27 November 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Arthur, M.P. Detecting signal spoofing and jamming attacks in UAV networks using a lightweight IDS. In Proceedings of the 2019 International Conference on Computer, Information and Telecommunication Systems (CITS), Beijing, China, 28–31 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, F.; Li, H.; Lu, M. GNSS spoofing detection based on unsynchronized double-antenna measurements. IEEE Access 2018, 6, 31203–31212. [Google Scholar] [CrossRef]
- Xu, R.; Ding, M.; Qi, Y.; Yue, S.; Liu, J. Performance analysis of GNSS/INS loosely coupled integration systems under spoofing attacks. Sensors 2018, 18, 4108. [Google Scholar] [CrossRef] [Green Version]
- Akos, D.M. Who’s afraid of the spoofer? GPS/GNSS spoofing detection via automatic gain control (AGC). Navigation 2012, 59, 281–290. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S.; Gioia, C. Performance assessment of GPS/GLONASS single point positioning in an urban envi-ronment. Acta Geod. Geophys. 2013, 48, 149–161. [Google Scholar] [CrossRef]
- Jin, M.H.; Han, Y.H.; Choi, H.H.; Park, C.; Heo, M.B.; Lee, S.J. GPS spoofing signal detection and compensation method in DGPS reference station. In Proceedings of the 11th International Conference on Control, Automation and Systems, Goyang, Korea, 26–29 October 2011; pp. 1616–1619. [Google Scholar]
- Blanch, J.; Walter, T.; Enge, P. Satellite navigation for aviation in 2025. Proc. IEEE 2012, 100, 1821–1830. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglionend, S.; Gioia, C. Performance assessment of aided global navigation satellite system for land navigation. IET Radar Sonar Nav. 2013, 7, 671–680. [Google Scholar] [CrossRef]
- Bakuła, M.; Przestrzelski, P.; Kaźmierczak, R. Reliable technology of centimeter GPS/GLONASS surveying in forest environments. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1029–1038. [Google Scholar] [CrossRef]
- Jafarnia-Jahromi, A.; Broumandan, A.; Nielsen, J.; Lachapelle, G. GPS vulnerability to spoofing threats and a review of anti -spoofing techniques. Int. J. Navig. Obs. 2012, 2012, 127072. [Google Scholar] [CrossRef]
- Baziar, A.R.; Moazedi, M.; Mosavi, M.R. Analysis of single frequency GPS receiver under delay and combining spoofing algorithm. Wirel. Pers. Commun. 2015, 83, 1955–1970. [Google Scholar] [CrossRef]
- Basan, E.; Basan, A.; Makarevich, O. Detection of anomalies in the robotic system based on the calculation of Kullback-Leibler divergence. In Proceedings of the 2019 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), Guilin, China, 17–19 October 2019; pp. 337–340. [Google Scholar] [CrossRef]
- Marais, J.; Nahimana, D.-F.; Viandier, N.; Duflos, E. GNSS accuracy enhancement based on pseudo range error estimation in an urban propagation environment. Expert Syst. Appl. 2013, 40, 5956–5964. [Google Scholar] [CrossRef] [Green Version]
- Kuusniemi, H.; Lachapelle, G. GNSS signal reliability testing in urban and indoor environments. In Proceedings of the 2004 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 26–28 January 2004; pp. 210–224. [Google Scholar]
- Cai, C.; Gao, Y. A combined GPS/GLONASS navigation algorithm for use with limited satellite visibility. J. Navig. 2009, 62, 671–685. [Google Scholar] [CrossRef]
- Mosavi, M.R.; Rezaei, M.J.; Pashaian, M.; Moghaddasi, M.S. A fast and accurate anti-jamming system based on wavelet packet transform for GPS receivers. GPS Solut. 2017, 21, 415–426. [Google Scholar] [CrossRef]
- Mosavi, M.R.; Shafee, F. Narrowband interference suppression for GPS navigation using neural networks. GPS Solut. 2016, 20, 341–351. [Google Scholar] [CrossRef]
- Kang, C.H.; Kim, S.Y.; Park, C.G. A GNSS interference identification using an adaptive cascading IIR notch filter. GPS Solut. 2014, 18, 605–613. [Google Scholar] [CrossRef]
- Chien, Y.-R. Design of GPS anti-jamming systems using adaptive notch filters. IEEE Syst. J. 2015, 9, 451–460. [Google Scholar] [CrossRef]
- Daneshmand, S.; Marathe, T.; Lachapelle, G. Millimetre level accuracy GNSS positioning with the blind adaptive beamforming method in interference environments. Sensors 2016, 16, 1824. [Google Scholar] [CrossRef] [Green Version]
- Wan, Y.; Chen, F.; Nie, J.; Sun, G. Optimum reference element selection for GNSS power-inversion adaptive arrays. Electron. Lett. 2016, 52, 1723–1725. [Google Scholar] [CrossRef]
- Arribas, J.; Prades, C.; Closas, P. Multi-antenna techniques for interference mitigation in GSS signal acquisition. EURASIP J. Adv. Signal. Process. 2013, 2013, 143. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.-W.; Zheng, J.-S. A broadened and deepened anti-jamming technology for high-dynamic GNSS array receivers. IEICE Trans. Commun. 2016, E99.B, 2055–2061. [Google Scholar] [CrossRef]
- Zhang, B.; Ma, H.; Sun, X.-L.; Tan, Q.; Pan, H. Robust anti-jamming method for high dynamic global positioning system receiver. IET Signal. Process. 2016, 10, 342–350. [Google Scholar] [CrossRef]
- Chen, F.; Nie, J.; Li, B.; Wang, F. Distortionless space-time adaptive processor for global navigation satellite system receiver. Electron. Lett. 2015, 51, 2138–2139. [Google Scholar] [CrossRef]
- Broumandan, A.; Jahromi, A.J.; Lachapelle, G. Spoofing detection, classification and cancelation (SDCC) receiver architecture for a moving GNSS receiver. GPS Solut. 2015, 19, 475–487. [Google Scholar] [CrossRef]
- Wang, F.; Li, H.; Lu, M. GNSS spoofing countermeasure with a single rotating antenna. IEEE Access 2017, 5, 8039–8047. [Google Scholar] [CrossRef]
- Hu, Y.; Bian, S.; Li, B.; Zhou, L. A novel array-based spoofing and jamming suppression method for GNSS receiver. IEEE Sens. J. 2018, 18, 2952–2958. [Google Scholar] [CrossRef]
- Varshosaz, M.; Afary, A.; Mojaradi, B.; Saadatseresht, M.; Ghanbari Parmehr, E. Spoofing detection of civilian UAVs using visual odometry. ISPRS Int. J. Geo-Inf. 2020, 9, 6. [Google Scholar] [CrossRef] [Green Version]
- Bekmezci, İ.; Şentürk, E.; Türker, T. Security issues in flying ad-hoc networks (FANETs). J. Aeronaut. Space Technol. 2016, 9, 13–21. [Google Scholar]
- Li, C.; Wang, X. Jamming research of the UAV GPS/INS integrated navigation system based on trajectory cheating. In Proceedings of the 9th International Congress on Image and Signal Processing, BioMedical Engineering, and Informatics (CISP-BMEI 2016), Datong, China, 15–17 October 2016; pp. 1113–1117. [Google Scholar] [CrossRef]
- Kiessé, T.S.; Zougab, N.; Kokonendji, C.C. Bayesian estimation of bandwidth in semiparametric kernel estimation of unknown probability mass and regression functions of count data. Comput. Stat. 2016, 31, 189–206. [Google Scholar] [CrossRef] [Green Version]
- Xiang, Y.; Li, K.; Zhou, W. Low-rate DDoS attacks detection and traceback by using new information metrics. IEEE Trans. Inf. Forensics Secur. 2011, 6, 426–437. [Google Scholar] [CrossRef]
- Bhatia, S. Ensemble-based model for DDoS attack detection and flash event separation. In Proceedings of the 2016 Future Technologies Conference (FTC), San Francisco, CA, USA, 6–7 December 2016; pp. 958–967. [Google Scholar] [CrossRef]
- Bouyeddou, B.; Harrou, F.; Sun, Y.; Kadri, B. Detection of smurf flooding attacks using Kullback-Leibler-based scheme. In Proceedings of the 4th International Conference on Computer and Technology Applications (ICCTA), Istanbul, Turkey, 3–5 May 2018; pp. 11–15. [Google Scholar] [CrossRef] [Green Version]
- Gamec, J.; Basan, E.; Basan, A.; Nekrasov, A.; Fidge, C.; Sushkin, N. An adaptive protection system for sensor networks based on analysis of neighboring nodes. Sensors 2021, 21, 6116. [Google Scholar] [CrossRef]
- Basan, E.; Lapina, M.; Mudruk, N.; Abramov, E. Intelligent intrusion detection system for a group of UAVs. In Advances in Swarm Intelligence; Tan, Y., Shi, Y., Eds.; ICSI 2021; Springer: Cham, Denmark, 2021; Volume 12690, pp. 230–240. [Google Scholar] [CrossRef]
- Basan, E.; Basan, A.; Nekrasov, A.; Fidge, C.; Gamec, J.; Gamcová, M. A self-diagnosis method for detecting UAV cyber attacks based on analysis of parameter changes. Sensors 2021, 21, 509. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Ansari, N. A hierarchical detection and response system to enhance security against lethal cyber-attacks in UAV networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1594–1606. [Google Scholar] [CrossRef] [Green Version]
- Sorbelli, F.B.; Conti, M.; Pinotti, C.M.; Rigoni, G. UAVs path deviation attacks: Survey and research challenges. In Proceedings of the 2020 IEEE International Conference on Sensing, Communication and Networking (SECON Workshops), Como, Italy, 22–26 June 2020; pp. 1–6. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Experiments | The Number of GPS Satellites Fixed by the Mobile Phone | The Number of GPS Satellites Fixed by the UAV |
|---|---|---|
| 1 | 11 | 14 |
| 2 | 10 | 15–16 |
| 3 | 9 | 16–17 |
| 4 | 9 | 17 |
| 5 | – | 19–9 |
| Number | Description | Range of Values |
|---|---|---|
| 1 | The speed after GPS satellite positioning | (0;40), 0.1 m/s |
| 2 | GPS track angle | (−180,180), degrees |
| 3 | GPS satellite number | (0;34) |
| 4 | GPS altitude | (0;1000), unit 0.1 meters |
| 5 | Integrated navigation latitude | (−90;90), 0.0000001 degree |
| 6 | Integrated navigation longitude | (−180;180), 0.0000001 degree |
| Hypothesis H0 | Accepted | Rejected |
|---|---|---|
| True | Type I error, | |
| False | Type II error, |
| Experiment | Likelihood Function | Standard Deviation |
|---|---|---|
| No attack real UAV | 0 | 0.360014 |
| Soft mode real UAV | 7.567656 | 2.091605 |
| Hard mode real UAV | 0.166778 | 6.596098 |
| Hard mode real UAV crashed | –9.35366 | 11.4978 |
| No attack simulation | 0 | 0.559889 |
| Soft mode simulation | 0.060293 | 4.214443 |
| Hard mode simulation 1 | 0.640072 | 5.51863 |
| Hard mode simulation 2 | −0.06096 | 8.342719 |
| Experiment | Type II Error | Attack Detection Probability |
|---|---|---|
| Soft mode simulation | 0.01 | 0.99 |
| Hard mode simulation 1 | 0.05 | 0.94 |
| Hard mode simulation 2 | 0.09 | 0.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Basan, E.; Basan, A.; Nekrasov, A.; Fidge, C.; Sushkin, N.; Peskova, O. GPS-Spoofing Attack Detection Technology for UAVs Based on Kullback–Leibler Divergence. Drones 2022, 6, 8. https://doi.org/10.3390/drones6010008
Basan E, Basan A, Nekrasov A, Fidge C, Sushkin N, Peskova O. GPS-Spoofing Attack Detection Technology for UAVs Based on Kullback–Leibler Divergence. Drones. 2022; 6(1):8. https://doi.org/10.3390/drones6010008
Chicago/Turabian StyleBasan, Elena, Alexandr Basan, Alexey Nekrasov, Colin Fidge, Nikita Sushkin, and Olga Peskova. 2022. "GPS-Spoofing Attack Detection Technology for UAVs Based on Kullback–Leibler Divergence" Drones 6, no. 1: 8. https://doi.org/10.3390/drones6010008
APA StyleBasan, E., Basan, A., Nekrasov, A., Fidge, C., Sushkin, N., & Peskova, O. (2022). GPS-Spoofing Attack Detection Technology for UAVs Based on Kullback–Leibler Divergence. Drones, 6(1), 8. https://doi.org/10.3390/drones6010008