
Decentralized Triangular Guidance Algorithms for Formations of UAVs

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Problem Statement and Modeling
3. Triangular Formation Algorithm
| Algorithm 1:Triangular Formation Algorithm (Time information has been omitted). |
 |
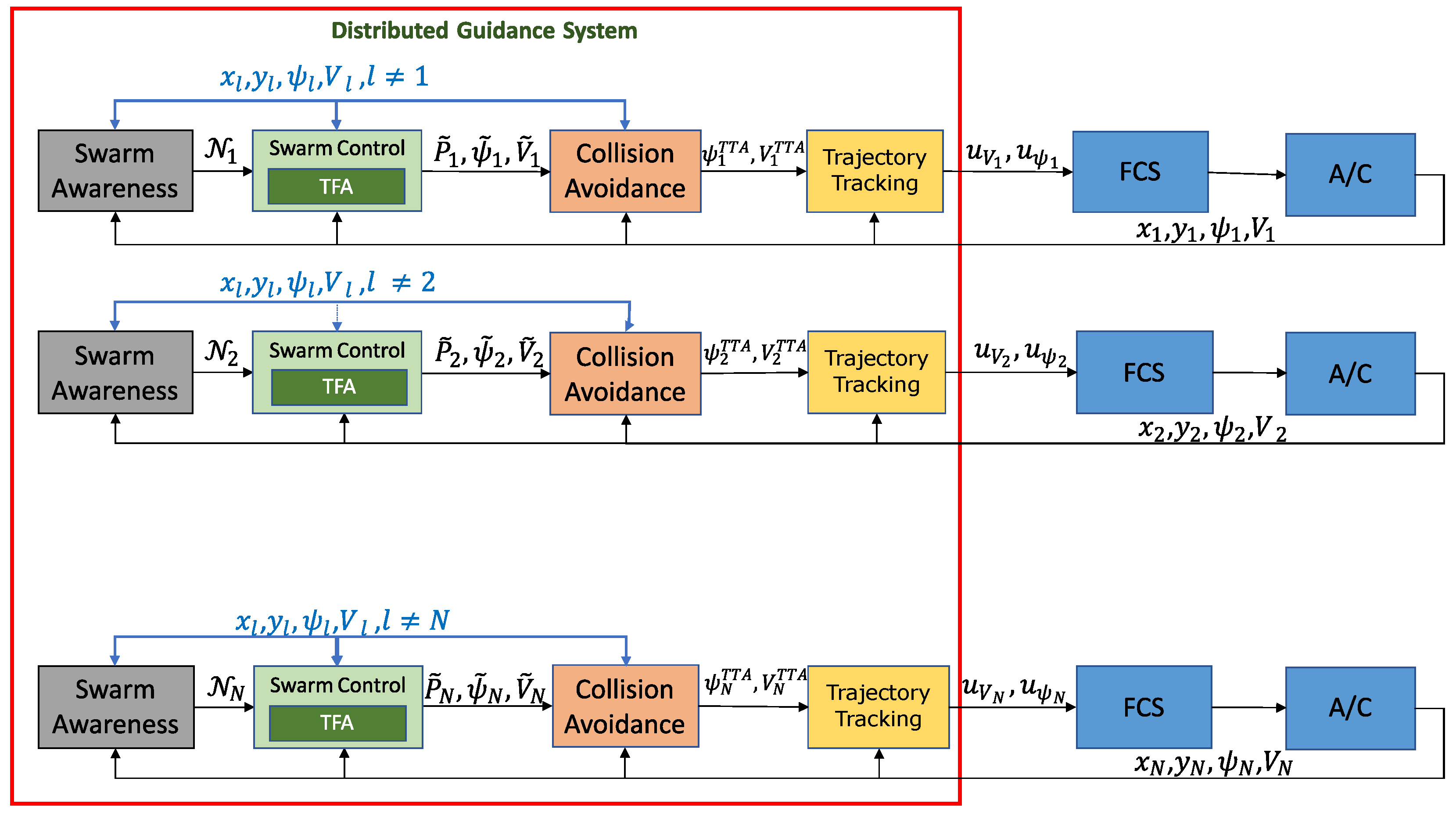
4. The Distributed Guidance System
- -
- A Swarm Awareness Algorithm (SAA) devoted to computing the neighbors set , needed to execute the Swarm Control Algorithm.
- -
- A Swarm Control Algorithm (SCA) aimed at calculating the next desired position and speed , at each time instant, in order to reach the target area at and keep the aircraft within the formation.
- -
- A Collision Avoidance Algorithm (CAA) that modifies the reference signal for the Trajectory Tracking Algorithm, and , in order to avoid collision with the obstacles and the adjacent vehicles.
- -
- A Trajectory Tracking Algorithm (TTA) that computes the control signals and to be supplied to the FCS.
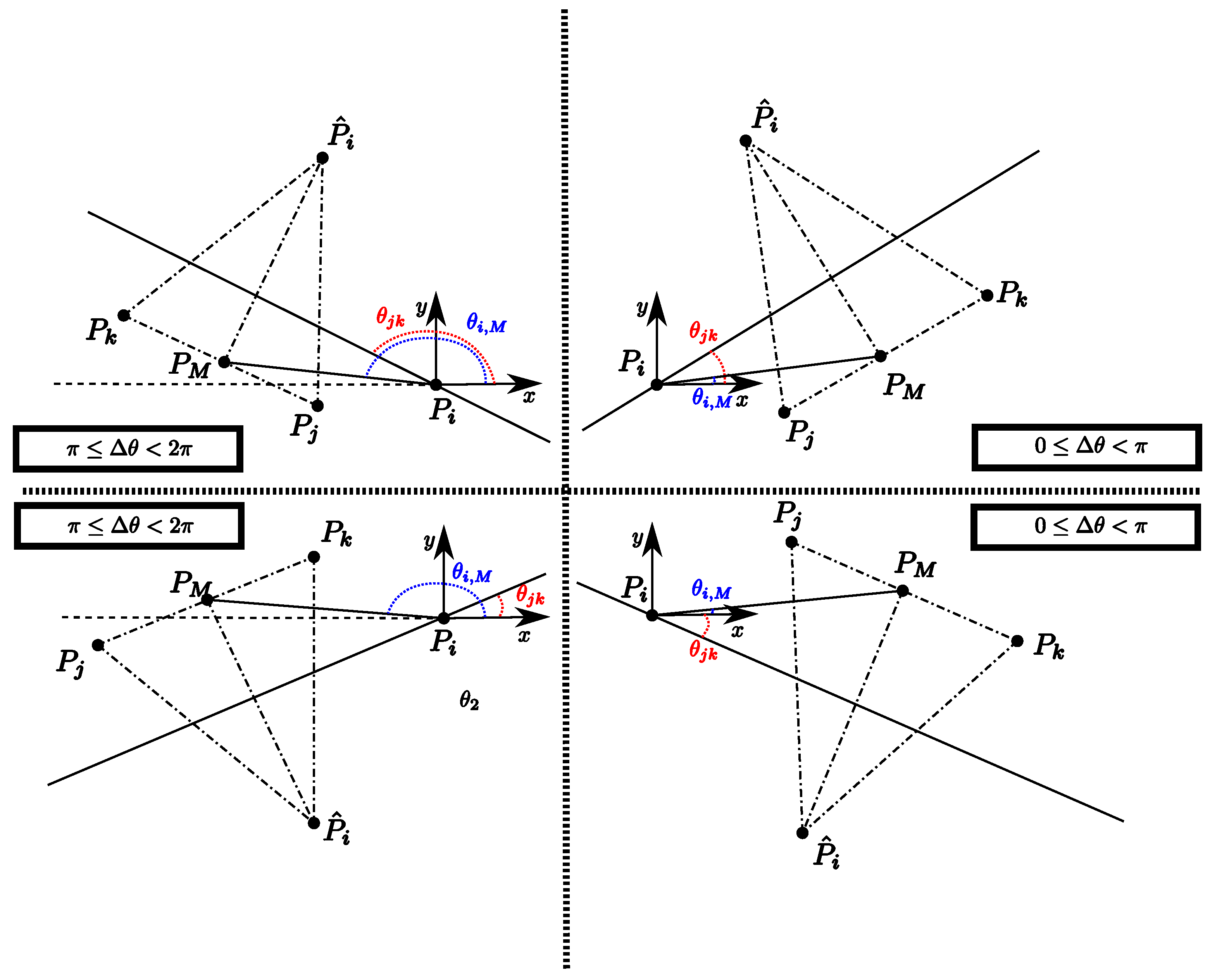
4.1. The Swarm Awareness Algorithm
- the operator wraps the angle to the interval ,
- defined in the range ,
- , defined in the range .
4.2. The Swarm Control Algorithm
- and are the minimum and maximum allowable speeds;
- is the current distance from the next desired position ;
- is the actual heading;
- is the control algorithm sampling time;
- ;
- is the desired reference speed.
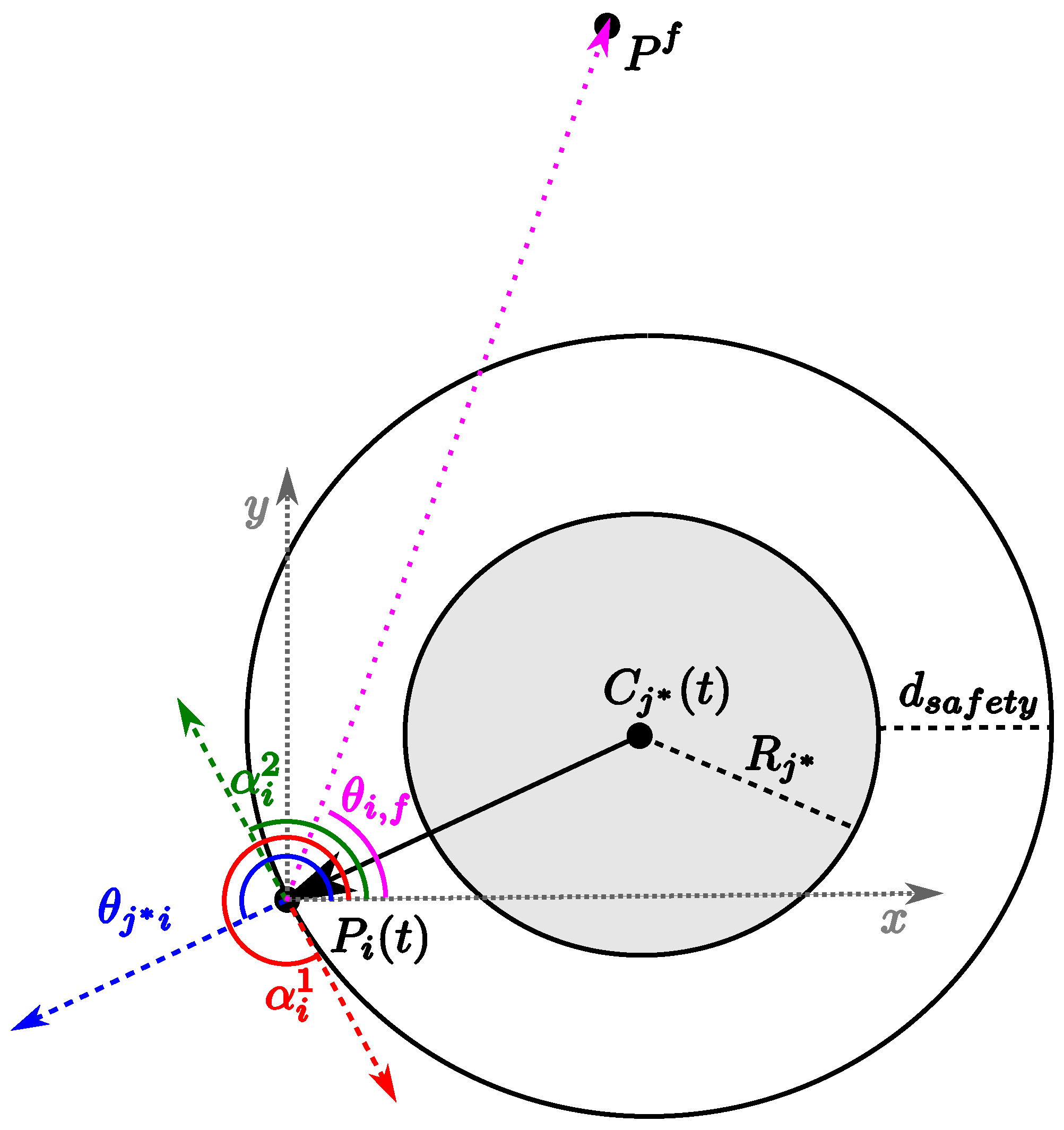
4.3. The Collision Avoidance and Trajectory Tracking Algorithms
- -
- is provided by the Swarm Control Algorithm,
- -
- ,
- -
- and are the direction of tangent to the obstacles in modified by the term in order to allow the aircraft to leave the circumference of radius ,
- -
- (see Figure 3).
5. The Proposed SCA Schemes
- Fixed Leader–Follower SCA;
- Free Leader–Follower SCA;
- No Leader SCA;
5.1. Fixed Leader–Follower SCA
5.2. Free Leader–Follower SCA
5.3. No Leader SCA
6. Numerical Results
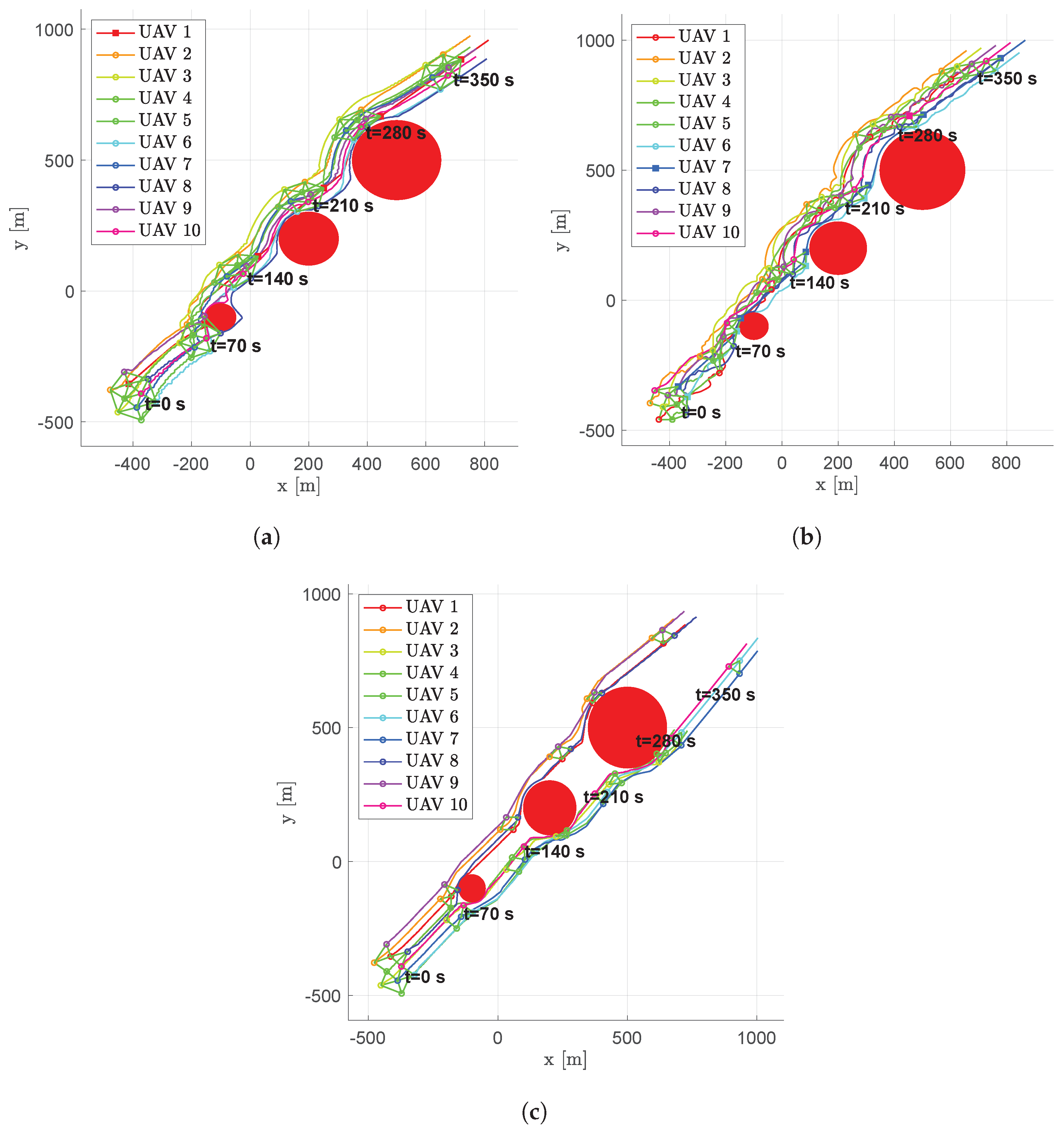
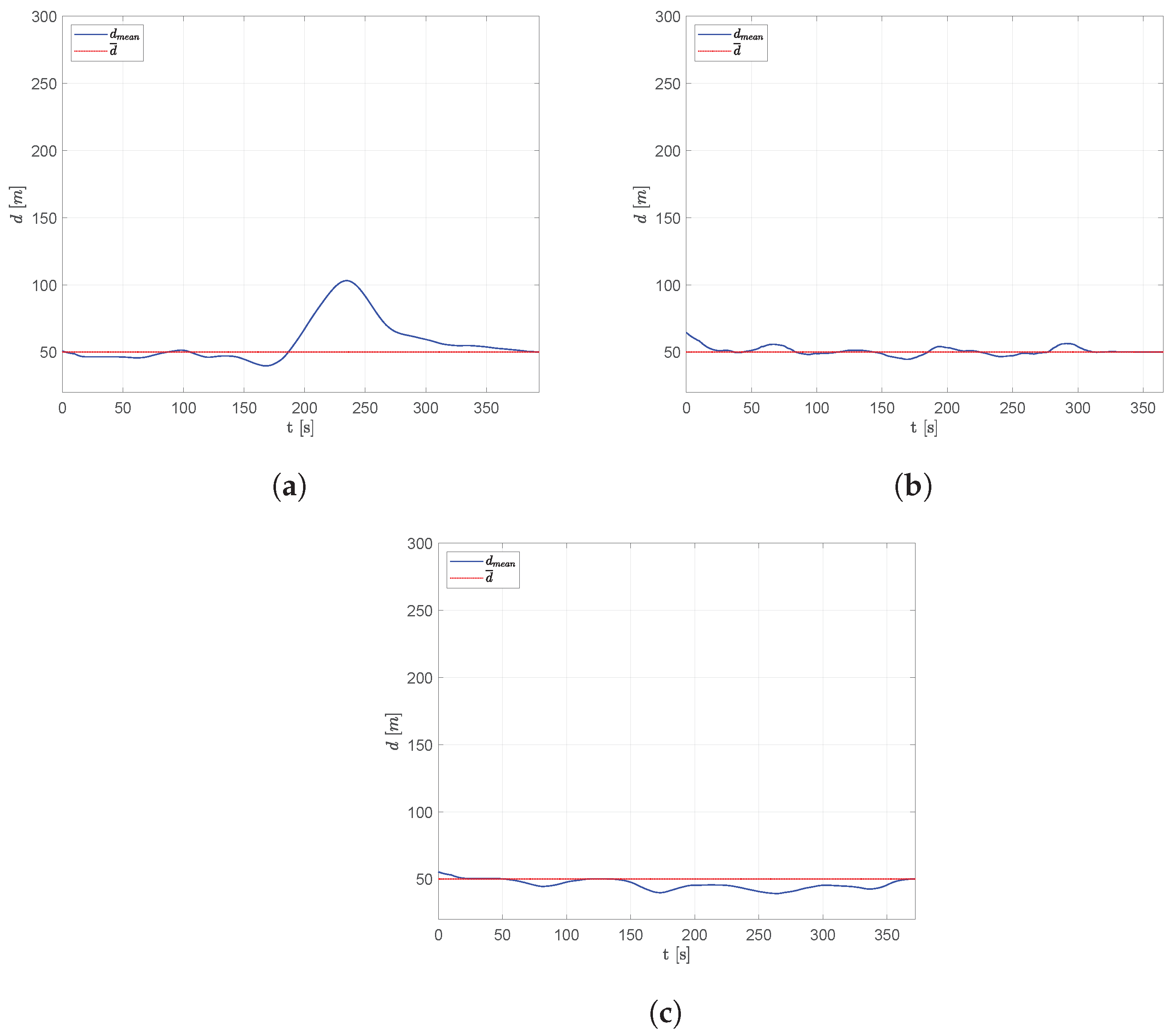
6.1. Scenario #1
6.2. Scenario #2
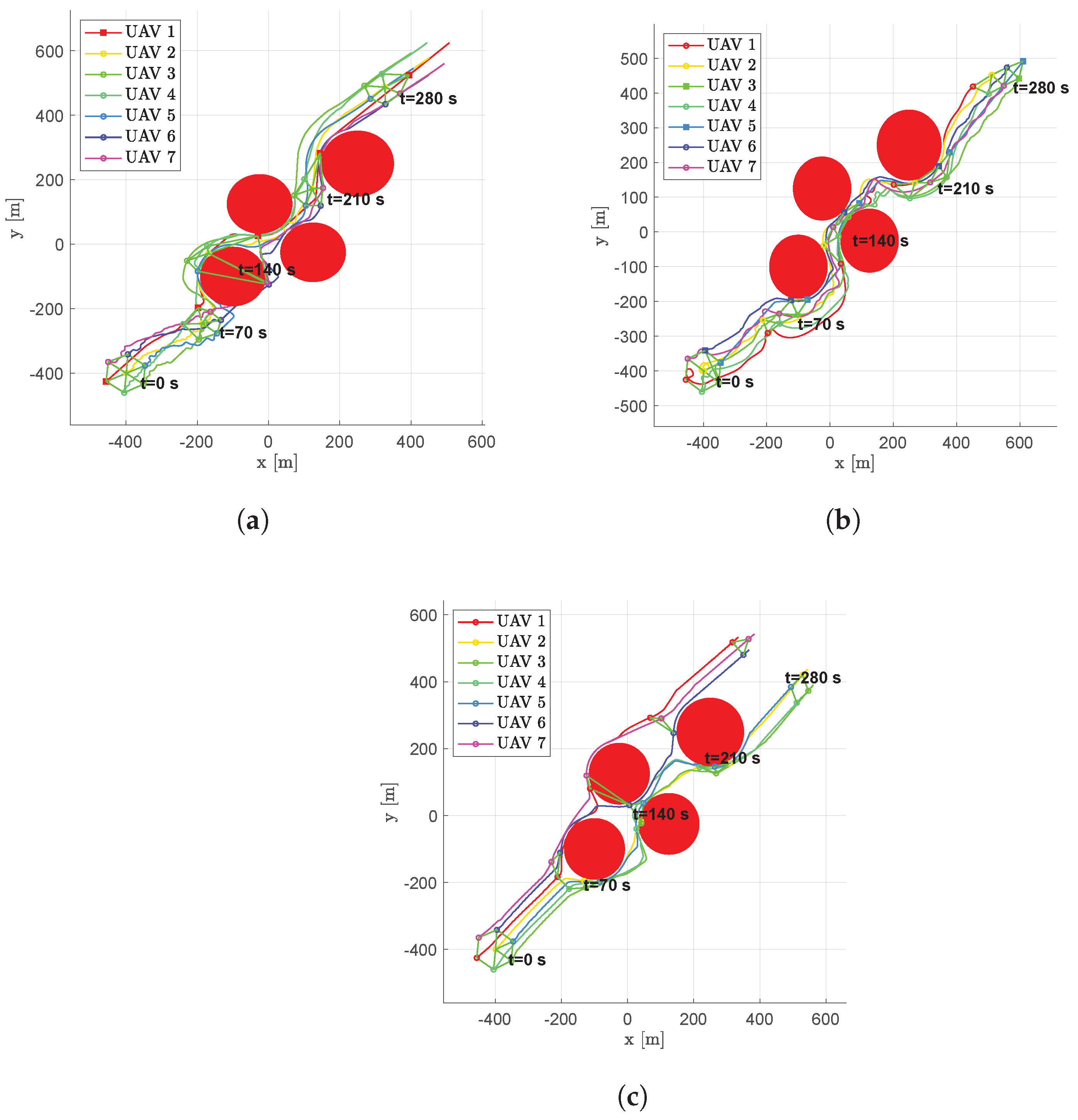
6.3. Scenario #3
6.4. Scenario #4
7. Conclusions
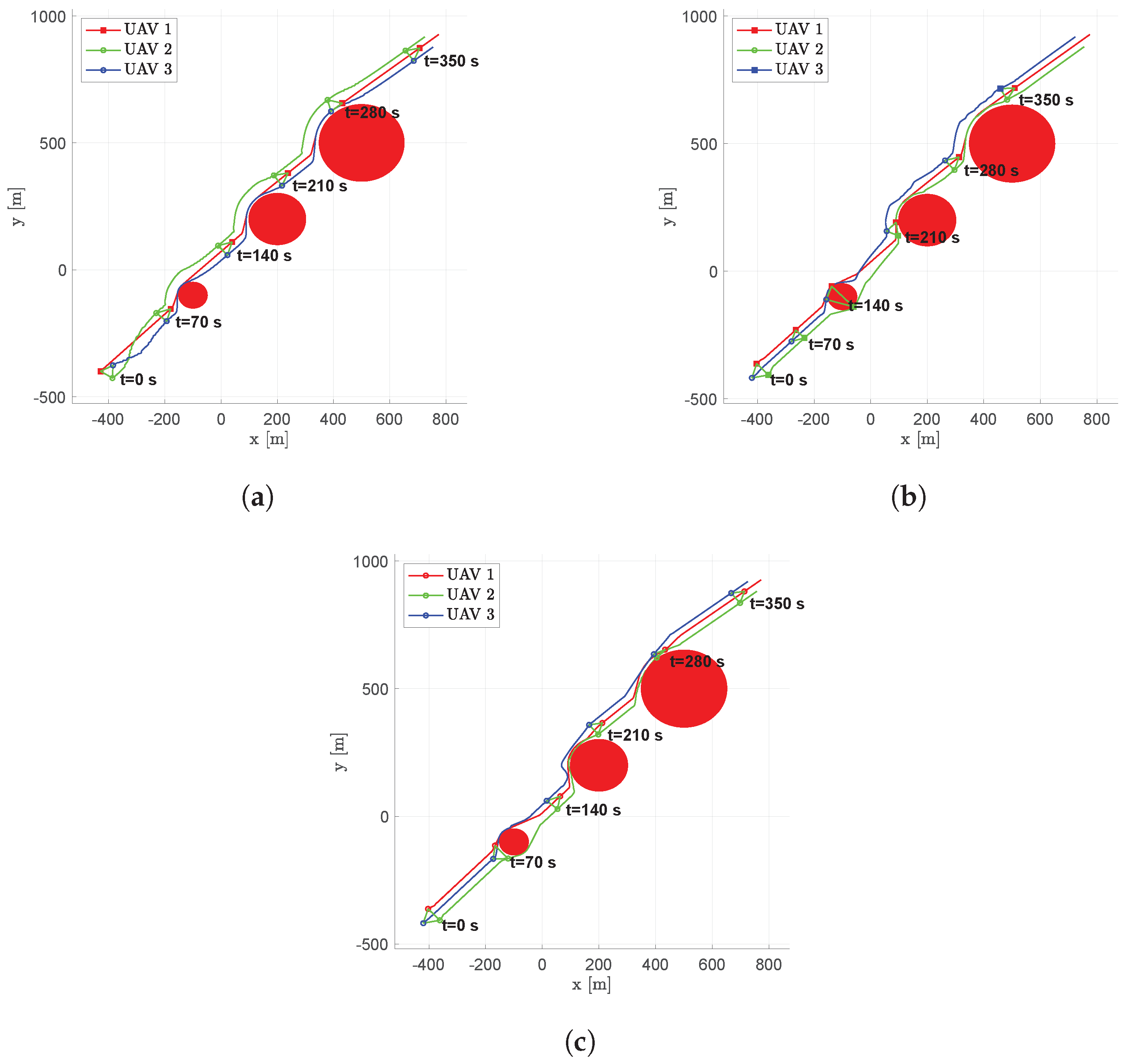
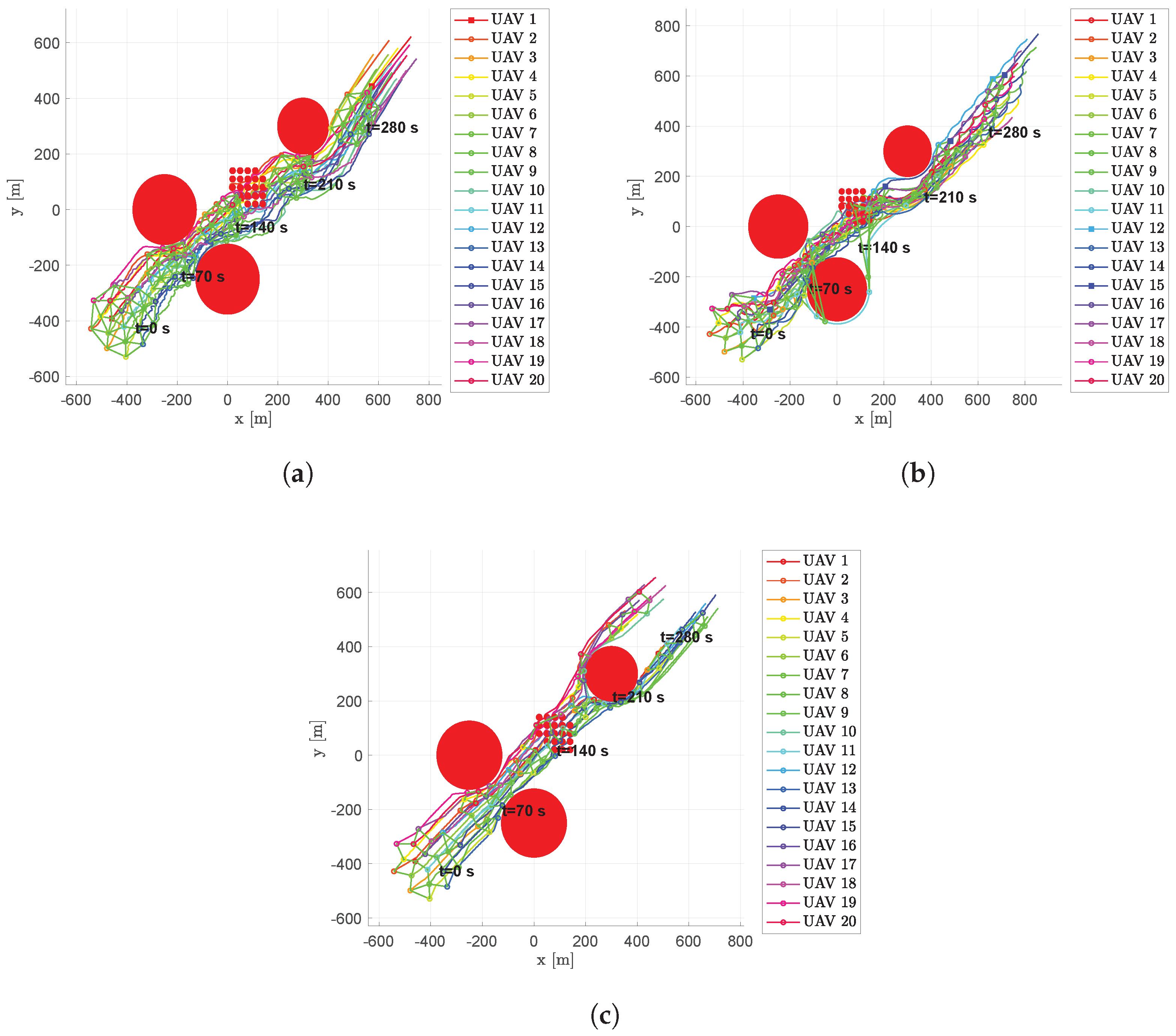
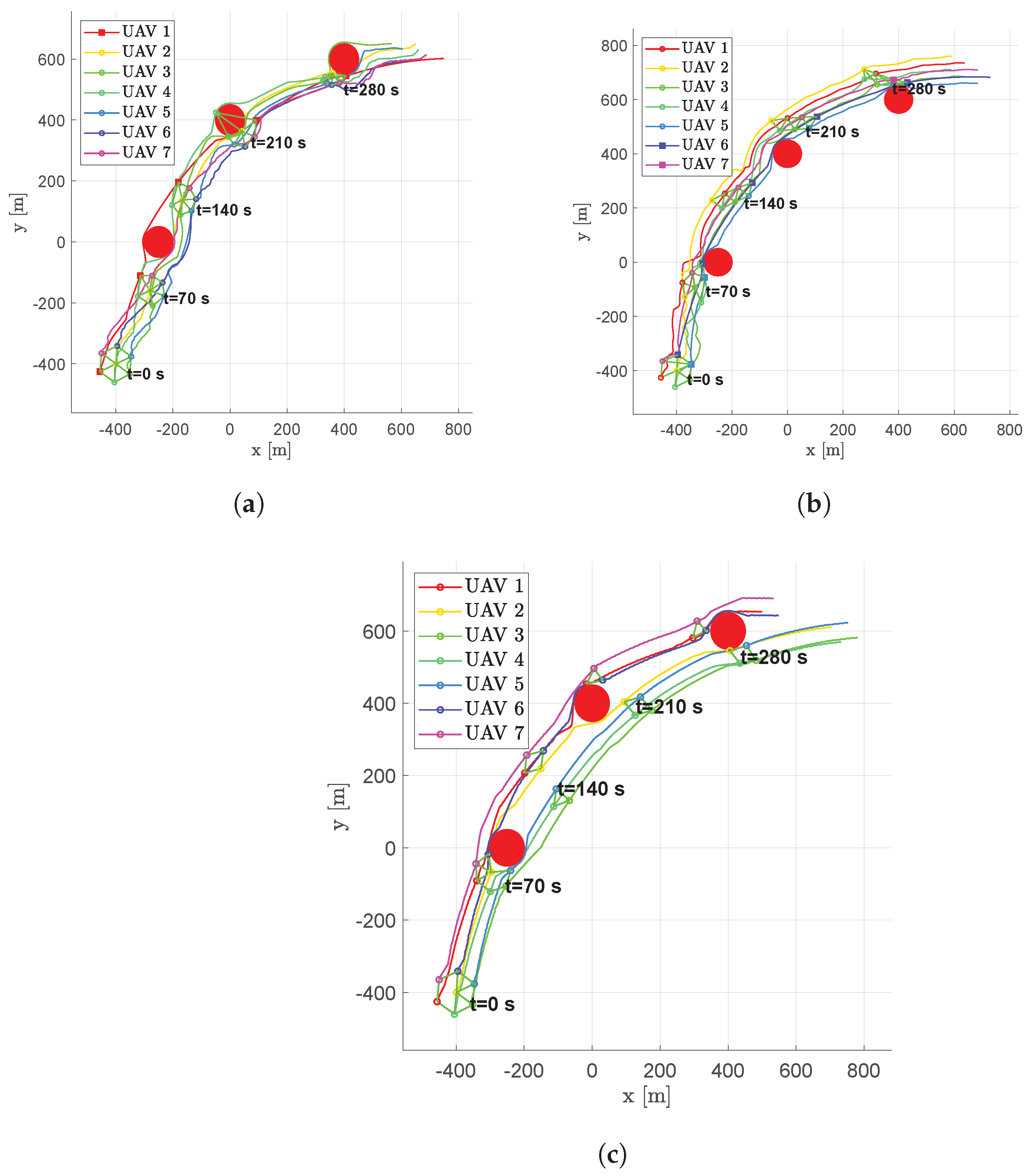
- The fixed leader and free leader schemes provide less smooth trajectories. Oscillations are clearly observed, even around the steady-state condition, that are better damped in the no leader scheme; this result is strictly related to the SCA operating philosophy according to which, whenever a leader is present, followers are forced to follow a point that is at a distance comparable with the TFA triangular elements, whereas in the no leader scheme, they point to the target and are less affected by the positions of their neighboring vehicles.
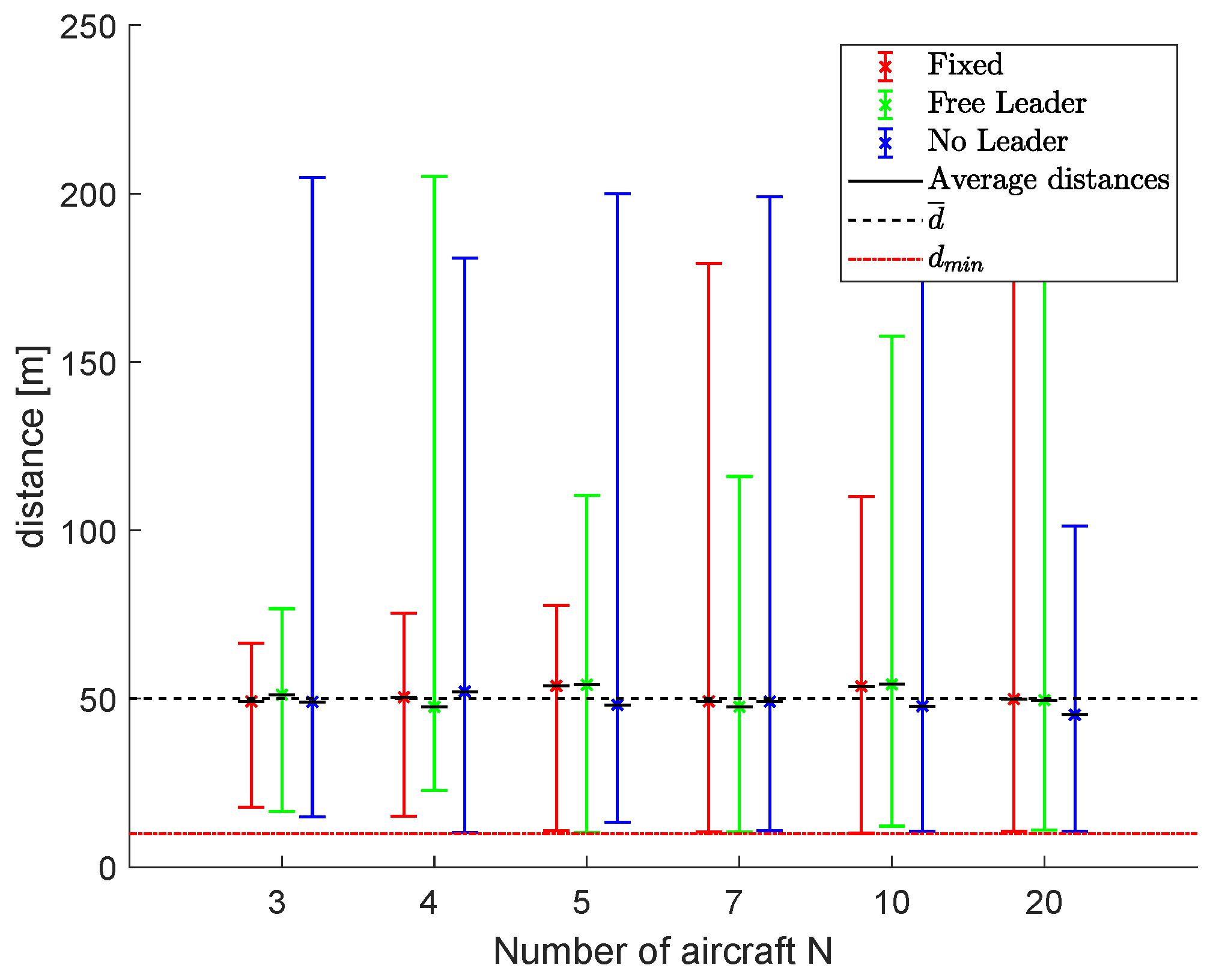
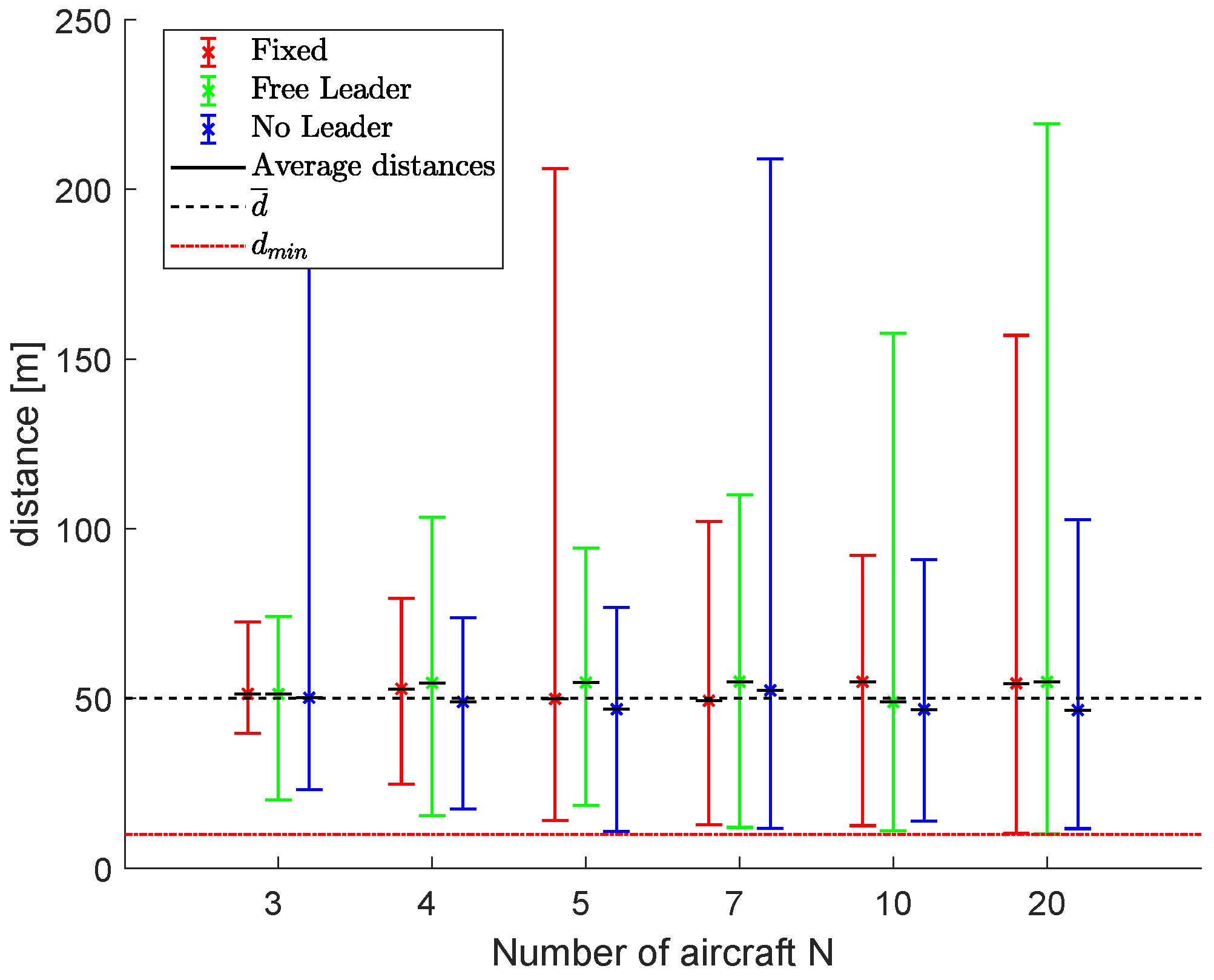
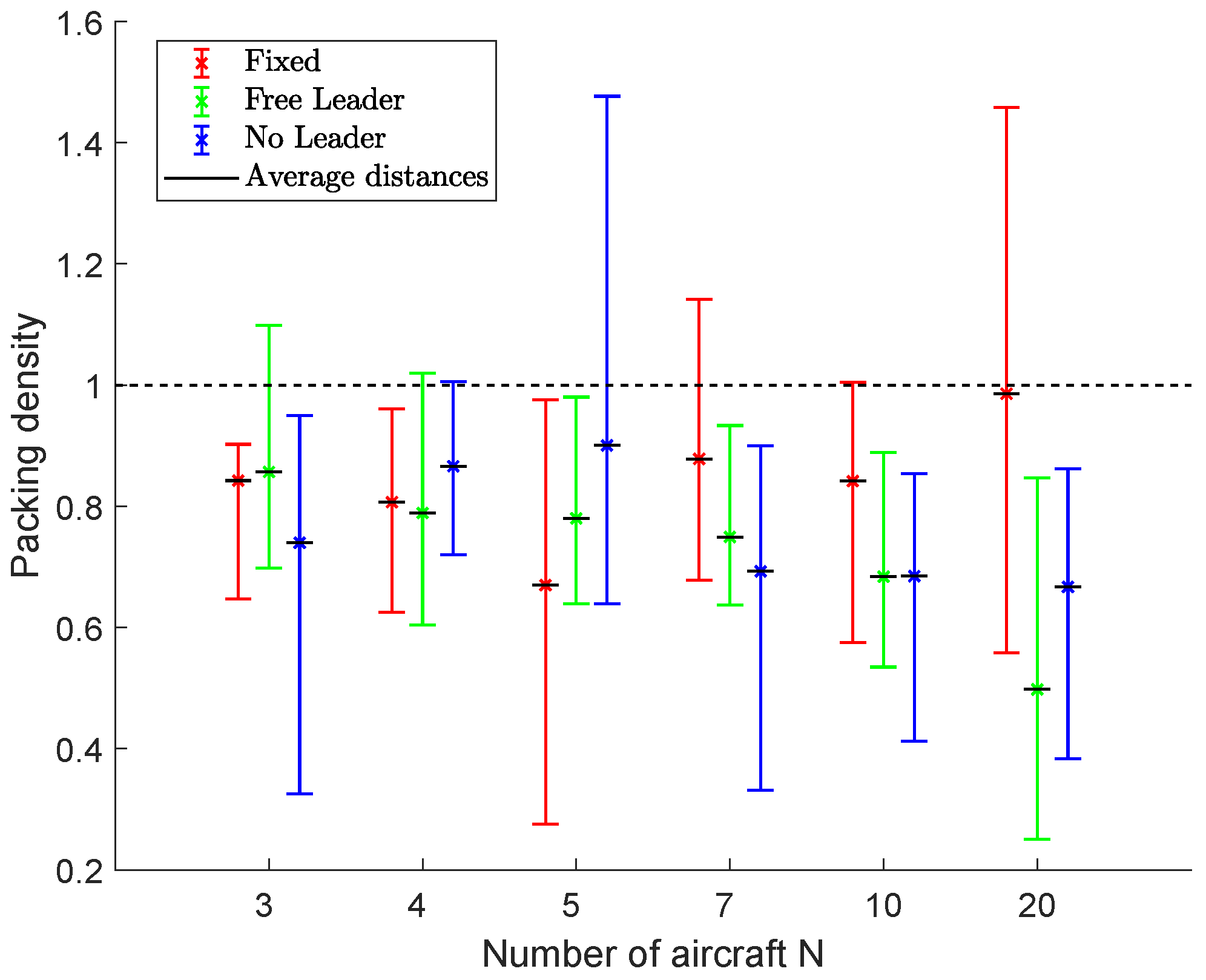
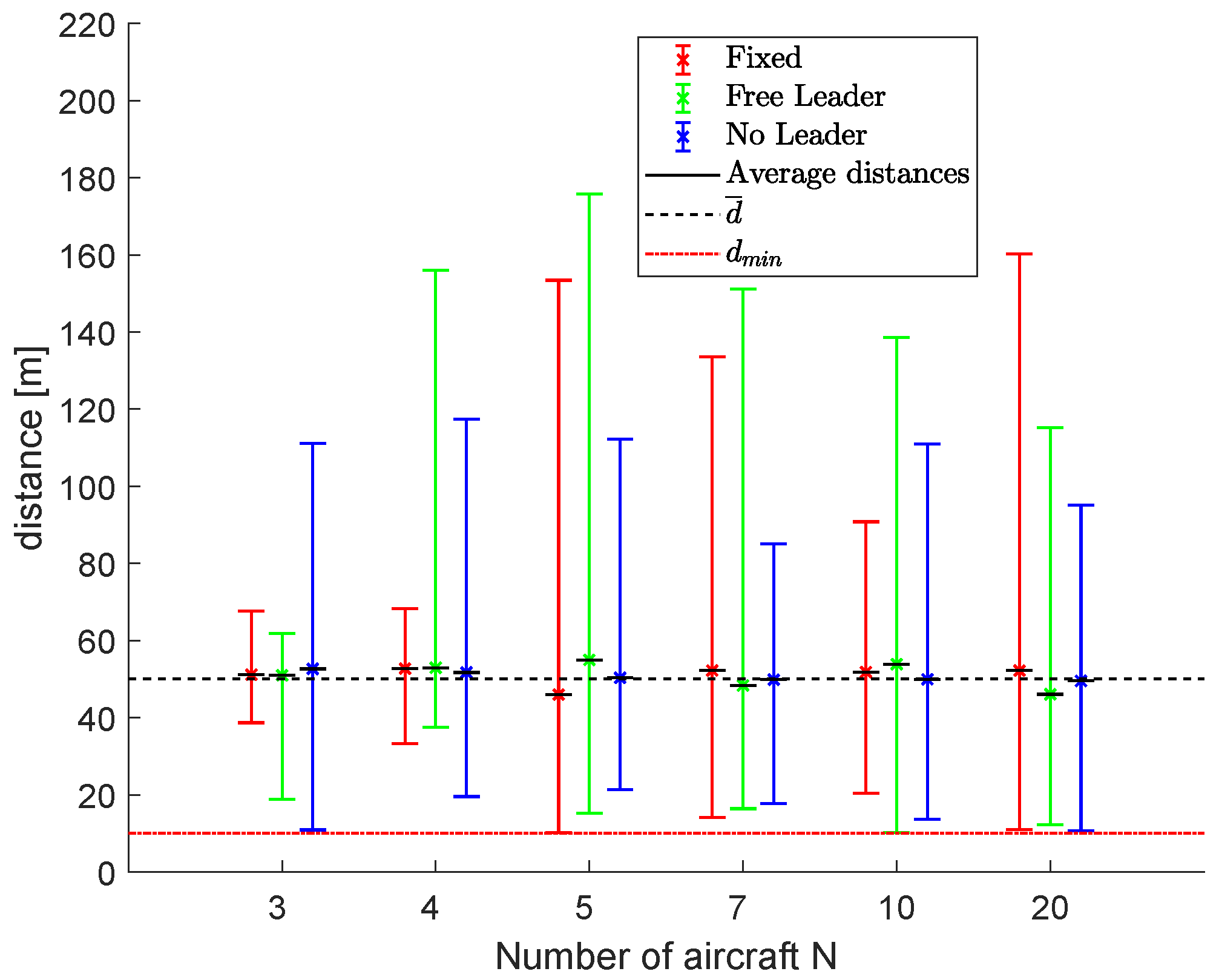
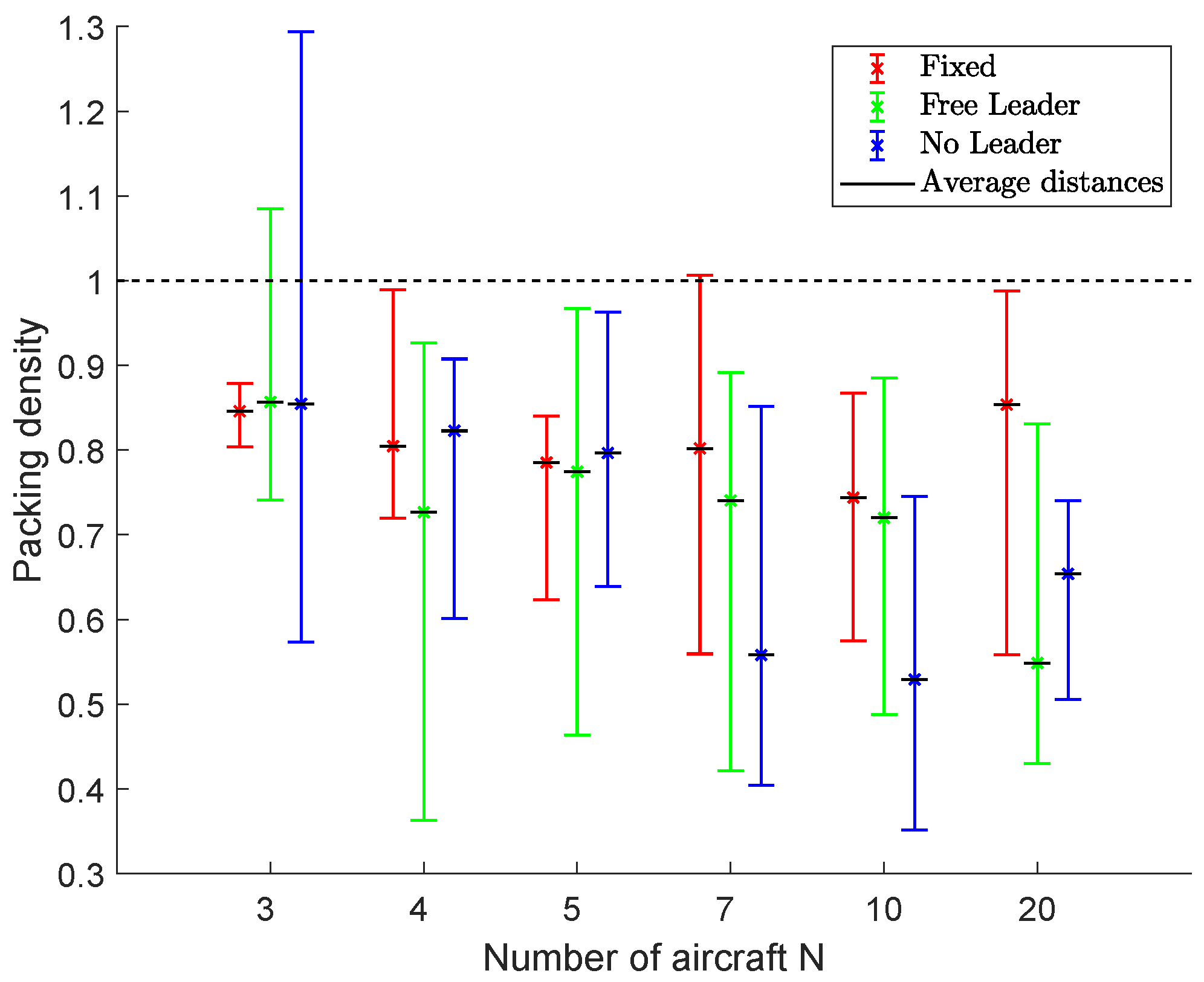
- Near obstacles, the mutual distances among aircraft tend to increase, being very different from the desired value; however, some differences can be observed: the fixed leader architecture makes the flight formation more compact, forcing aircraft to maintain the formation shape for a longer time, while the free leader and no leader schemes allow the spreading of the formation near obstacles. It is worth noticing that the no leader architecture not only provides more regular (straight) trajectories, but it allows faster recovery of the desired distances once the obstacle is passed compared to the free leader scheme. In such a case, in fact, the selection process of the leader tends to delay the air vehicle’s rendezvous after the flight formation spreads in the presence of obstacles.
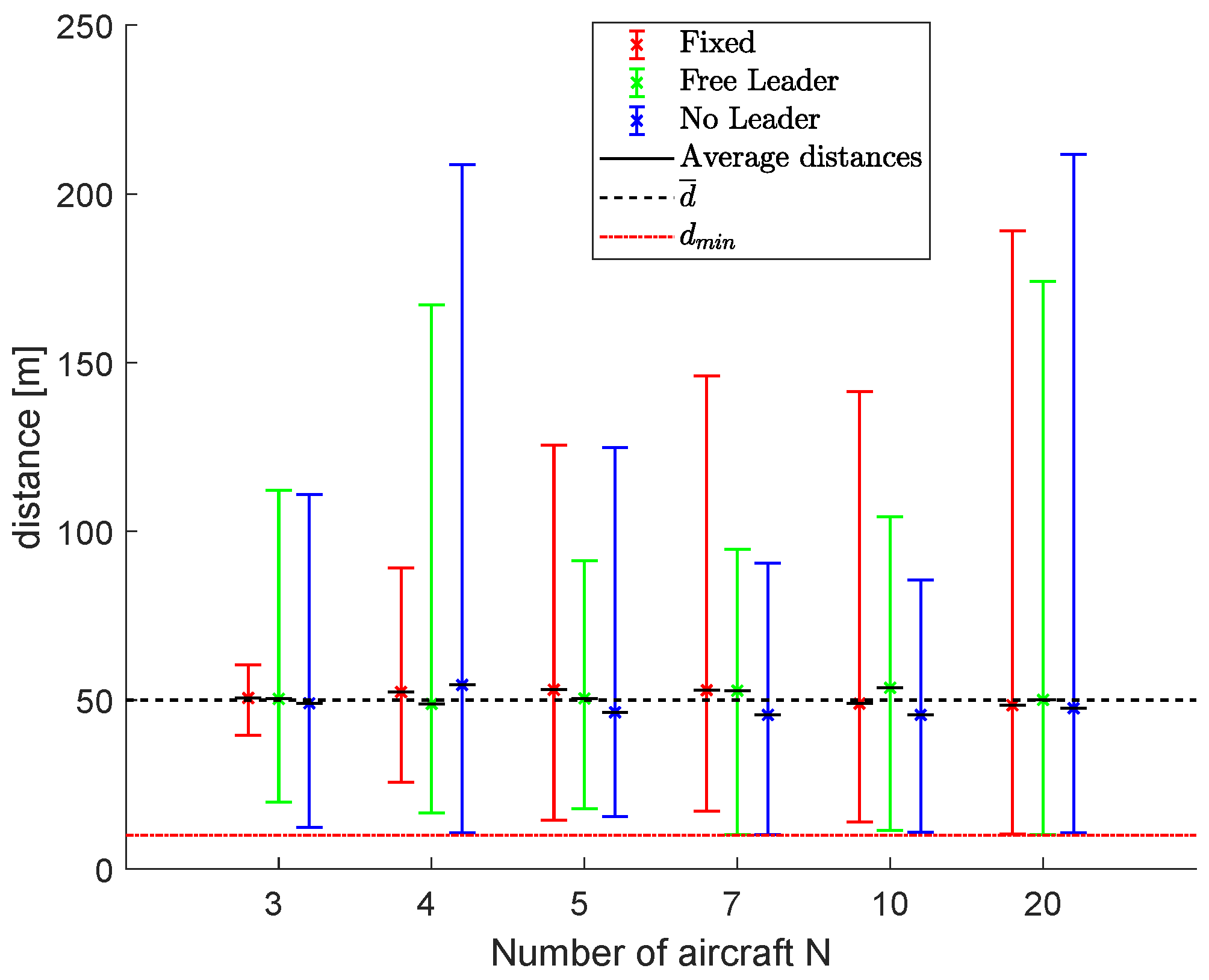
- However, as the number of vehicles increases, the no leader scheme has a draw-back: as shown in Scenario #3, sub-swarms are not able to meet again after passing the obstacle. This is due to the fact that each aircraft applies TFA with the two nearest vehicles present both ahead and behind, not following a leader but rather pointing to the target. On the other hand, in the free-leader scheme, only vehicles present forward are taken into account, reducing the number of possible edges in the mesh and resulting in increasing importance of vehicles marked as leaders guiding the followers to the target.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| TFA | Triangular Formation Algorithm |
| UAV | Unmanned Aerial Vehicle |
| SGA | Swarm Guidance Algorithm |
| CAA | Collision Avoidance Algorithm |
| TTA | Trajectory Tracking Algorithm |
| FCS | Flight Control System |
| SAA | Swarm Awareness Algorithm |
| SCA | Swarm Control Algorithm |
References
- Dudek, G.; Jenkin, M.; Milios, E.; Wilkes, D. A taxonomy for multi-agent robotics. Auton. Robot. 1996, 3, 374–397. [Google Scholar] [CrossRef]
- Cao, Y.U.; Fukunaga, A.S.; Kahng, A. Cooperative mobile robotics: Antecedents and directions. Auton. Robot. 1997, 4, 7–27. [Google Scholar] [CrossRef]
- Schneider-Fontan, M.; Mataric, M. Territorial multi-robot task division. IEEE Trans. Robot. Autom. 1998, 14, 815–822. [Google Scholar] [CrossRef] [Green Version]
- Maza, I.; Ollero, A.; Casado, E.; Scarlatti, D. Classification of Multi-UAV Architectures. In Handbook of Unmanned Aerial Vehicles; Valavanis, K.P., Vachtsevanos, G.J., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 953–975. [Google Scholar] [CrossRef]
- Kushleyev, A.; Mellinger, D.; Powers, C.; Kumar, V. Towards a swarm of agile micro quadrotors. Auton. Robot. 2013, 35, 287–300. [Google Scholar] [CrossRef]
- Cicala, M.; D’Amato, E.; Notaro, I.; Mattei, M. Distributed UAV State Estimation in UTM context. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 557–562. [Google Scholar]
- D’Amato, E.; Notaro, I.; Mattei, M.; Tartaglione, G. Attitude and position estimation for an UAV swarm using consensus Kalman filtering. In Proceedings of the 2015 IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 4–5 June 2015; pp. 519–524. [Google Scholar]
- D’Amato, E.; Nardi, V.A.; Notaro, I.; Scordamaglia, V. A Particle Filtering Approach for Fault Detection and Isolation of UAV IMU Sensors: Design, Implementation and Sensitivity Analysis. Sensors 2021, 21, 3066. [Google Scholar] [CrossRef] [PubMed]
- Elmokadem, T.; Savkin, A.V. Computationally-Efficient Distributed Algorithms of Navigation of Teams of Autonomous UAVs for 3D Coverage and Flocking. Drones 2021, 5, 124. [Google Scholar] [CrossRef]
- Hildmann, H.; Kovacs, E.; Saffre, F.; Isakovic, A. Nature-inspired drone swarming for real-time aerial data-collection under dynamic operational constraints. Drones 2019, 3, 71. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Zhang, K.; Jiang, Y.; Niu, S.; Yang, T.; Song, H. Communication Aware UAV Swarm Surveillance Based on Hierarchical Architecture. Drones 2021, 5, 33. [Google Scholar] [CrossRef]
- Guo, X.; Lu, J.; Alsaedi, A.; Alsaadi, F.E. Bipartite consensus for multi-agent systems with antagonistic interactions and communication delays. Phys. A Stat. Mech. Appl. 2018, 495, 488–497. [Google Scholar] [CrossRef]
- Lee, W.; Kim, D. Autonomous shepherding behaviors of multiple target steering robots. Sensors 2017, 17, 2729. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Forestiero, A. Bio-inspired algorithm for outliers detection. Multimed. Tools Appl. 2017, 76, 25659–25677. [Google Scholar] [CrossRef]
- Wang, J.; Ahn, I.S.; Lu, Y.; Yang, T.; Staskevich, G. A distributed estimation algorithm for collective behaviors in multiagent systems with applications to unicycle agents. Int. J. Control Autom. Syst. 2017, 15, 2829–2839. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Wang, X.; Lin, Z. Flocking of multi-agents with a virtual leader. IEEE Trans. Autom. Control 2009, 54, 293–307. [Google Scholar] [CrossRef]
- Sun, F.; Turkoglu, K. Distributed real-time non-linear receding horizon control methodology for multi-agent consensus problems. Aerosp. Sci. Technol. 2017, 63, 82–90. [Google Scholar] [CrossRef] [Green Version]
- Bassolillo, S.R.; D’Amato, E.; Notaro, I.; Blasi, L.; Mattei, M. Decentralized mesh-based model predictive control for swarms of UAVs. Sensors 2020, 20, 4324. [Google Scholar] [CrossRef]
- Jafari, M.; Xu, H. Biologically-inspired intelligent flocking control for networked multi-UAS with uncertain network imperfections. Drones 2018, 2, 33. [Google Scholar] [CrossRef] [Green Version]
- Krick, L.; Broucke, M.E.; Francis, B.A. Stabilisation of infinitesimally rigid formations of multi-robot networks. Int. J. Control 2009, 82, 423–439. [Google Scholar] [CrossRef]
- Tian, Y.P.; Wang, Q. Global stabilization of rigid formations in the plane. Automatica 2013, 49, 1436–1441. [Google Scholar] [CrossRef]
- Anderson, B.D.; Yu, C.; Fidan, B.; Hendrickx, J.M. Rigid graph control architectures for autonomous formations. IEEE Control Syst. Mag. 2008, 28, 48–63. [Google Scholar]
- Olfati-Saber, R.; Murray, R.M. Graph rigidity and distributed formation stabilization of multi-vehicle systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; Volume 3, pp. 2965–2971. [Google Scholar]
- Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2007, 17, 1002–1033. [Google Scholar] [CrossRef] [Green Version]
- Xiao, F.; Wang, L.; Chen, J.; Gao, Y. Finite-time formation control for multi-agent systems. Automatica 2009, 45, 2605–2611. [Google Scholar] [CrossRef]
- Jing, G.; Zheng, Y.; Wang, L. Consensus of multiagent systems with distance-dependent communication networks. IEEE Trans. Neural Networks Learn. Syst. 2016, 28, 2712–2726. [Google Scholar] [CrossRef] [PubMed]
- Fax, J.A.; Murray, R.M. Information flow and cooperative control of vehicle formations. IEEE Trans. Autom. Control 2004, 49, 1465–1476. [Google Scholar] [CrossRef] [Green Version]
- Coogan, S.; Arcak, M. Scaling the size of a formation using relative position feedback. Automatica 2012, 48, 2677–2685. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Xiao, F. A new approach to consensus problems in discrete-time multiagent systems with time-delays. Sci. China Ser. Inf. Sci. 2007, 50, 625–635. [Google Scholar] [CrossRef]
- Wang, L.; Xiao, F. Finite-time consensus problems for networks of dynamic agents. IEEE Trans. Autom. Control 2010, 55, 950–955. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th annual conference on Computer graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 25–34. [Google Scholar]
- Kosuge, K.; Sato, M. Transportation of a single object by multiple decentralized-controlled nonholonomic mobile robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’99), Kyongju, Korea, 17–21 October 1999; Volume 3, pp. 1681–1686. [Google Scholar] [CrossRef]
- Bangash, Z.A.; Sanchez, R.P.; Ahmed, A.; Khan, M.J. Aerodynamics of Formation Flight. J. Aircr. 2006, 43, 907–912. [Google Scholar] [CrossRef]
- Ariola, M.; Mattei, M.; D’Amato, E.; Notaro, I.; Tartaglione, G. Model predictive control for a swarm of fixed wing uavs. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, ICAS, Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Yun, B.; Chen, B.M.; Lum, K.Y.; Lee, T.H. Design and implementation of a leader-follower cooperative control system for unmanned helicopters. J. Control Theory Appl. 2010, 8, 61–68. [Google Scholar] [CrossRef]
- Bayraktar, S.; Fainekos, G.; Pappas, G. Experimental cooperative control of fixed-wing unmanned aerial vehicles. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2004; Volume 4, pp. 4292–4298. [Google Scholar] [CrossRef]
- Paul, T.; Krogstad, T.R.; Gravdahl, J.T. Modelling of UAV formation flight using 3D potential field. Simul. Model. Pract. Theory 2008, 16, 1453–1462. [Google Scholar] [CrossRef]
- Dasgupta, P. A Multiagent Swarming System for Distributed Automatic Target Recognition Using Unmanned Aerial Vehicles. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 2008, 38, 549–563. [Google Scholar] [CrossRef]
- D’Amato, E.; Mattei, M.; Notaro, I. Bi-level flight path planning of UAV formations with collision avoidance. J. Intell. Robot. Syst. 2019, 93, 193–211. [Google Scholar] [CrossRef]
- Fuchs, C.; Borst, C.; de Croon, G.C.; Van Paassen, M.; Mulder, M. An ecological approach to the supervisory control of UAV swarms. Int. J. Micro Air Veh. 2014, 6, 211–229. [Google Scholar] [CrossRef] [Green Version]
- Han, K.; Lee, J.; Kim, Y. Unmanned aerial vehicle swarm control using potential functions and sliding mode control. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2008, 222, 721–730. [Google Scholar] [CrossRef]
- Modares, J.; Mastronarde, N.; Dantu, K. Simulating Unmanned Aerial Vehicle swarms with the UB-ANC emulator. Int. J. Micro Air Veh. 2019, 11, 1756829319837668. [Google Scholar] [CrossRef] [Green Version]
- Sanchez-Aguero, V.; Valera, F.; Vidal, I.; Tipantuña, C.; Hesselbach, X. Energy-Aware Management in Multi-UAV Deployments: Modelling and Strategies. Sensors 2020, 20, 2791. [Google Scholar] [CrossRef]
- Parker, L. ALLIANCE: An architecture for fault tolerant multirobot cooperation. IEEE Trans. Robot. Autom. 1998, 14, 220–240. [Google Scholar] [CrossRef] [Green Version]
- Gerkey, B.P.; Matarić, M.J. A Formal Analysis and Taxonomy of Task Allocation in Multi-Robot Systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef] [Green Version]
- Viguria, A.; Maza, I.; Ollero, A. Distributed Service-Based Cooperation in Aerial/Ground Robot Teams Applied to Fire Detection and Extinguishing Missions. Adv. Robot. 2010, 24, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Hsieh, M.A.; Cowley, A.; Keller, J.F.; Chaimowicz, L.; Grocholsky, B.; Kumar, V.; Taylor, C.J.; Endo, Y.; Arkin, R.C.; Jung, B.; et al. Adaptive teams of autonomous aerial and ground robots for situational awareness. J. Field Robot. 2007, 24, 991–1014. [Google Scholar] [CrossRef] [Green Version]
- Maza, I.; Caballero, F.; Capitan, J.; Martinez-de Dios, J.; Ollero, A. A distributed architecture for a robotic platform with aerial sensor transportation and self-deployment capabilities. J. Field Robot. 2011, 28, 303–328. [Google Scholar] [CrossRef] [Green Version]
- Li, X. A Triangular Formation Strategy for Collective Behaviors of Robot Swarm. In Computational Science and Its Applications—ICCSA 2009; Gervasi, O., Taniar, D., Murgante, B., Laganà, A., Mun, Y., Gavrilova, M.L., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5592, pp. 897–911. [Google Scholar] [CrossRef]
- Barnes, L.; Fields, M.; Valavanis, K. Unmanned ground vehicle swarm formation control using potential fields. In Proceedings of the 2007 Mediterranean Conference on Control Automation, Athens, Greece, 27–29 June 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Beaulieu, A.; Givigi, S.N.; Ouellet, D.; Turner, J.T. Model-Driven Development Architectures to Solve Complex Autonomous Robotics Problems. IEEE Syst. J. 2018, 12, 1404–1413. [Google Scholar] [CrossRef]
- Anderson, B.D.; Yu, C.; Dasgupta, S.; Morse, A.S. Control of a three-coleader formation in the plane. Syst. Control Lett. 2007, 56, 573–578. [Google Scholar] [CrossRef]
- Cao, M.; Morse, A.S.; Yu, C.; Anderson, B.D.; Dasguvta, S. Controlling a triangular formation of mobile autonomous agents. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3603–3608. [Google Scholar]
- Cao, M.; Yu, C.; Anderson, B.D. Formation control using range-only measurements. Automatica 2011, 47, 776–781. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Hua, Q.; Chen, Z. Globally Exponentially Stable Triangle Formation Control of Multi-robot Systems. In Chinese Intelligent Systems Conference; Springer: Singapore, 2016; pp. 361–370. [Google Scholar]
- Dimarogonas, D.V.; Johansson, K.H. On the stability of distance-based formation control. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 1200–1205. [Google Scholar]
- D’Amato, E.; Mattei, M.; Notaro, I. Distributed Reactive Model Predictive Control for Collision Avoidance of Unmanned Aerial Vehicles in Civil Airspace. J. Intell. Robot. Syst. 2020, 97, 185–203. [Google Scholar] [CrossRef]
- Agranovich, G.; Mery, Z. Lyapunov stability of proportional navigation guidance systems. Funct. Differ. Equ. 2017, 24, 3–12. [Google Scholar]
- Yanushevsky, R.; Boord, W. Lyapunov approach to guidance laws design. Nonlinear Anal. Theory Methods Appl. 2005, 63, e743–e749. [Google Scholar] [CrossRef]
- Gurfil, P.; Jodorkovsky, M.; Guelman, M. Finite time stability approach to proportional navigation systems analysis. J. Guid. Control Dyn. 1998, 21, 853–861. [Google Scholar] [CrossRef]
- Weiwen, Z.; Xiaogeng, L.; Xiaohong, J. Finite-time stability analysis of proportional navigation guidance system. In Proceedings of the 2010 IEEE International Conference on Intelligent Computing and Intelligent Systems, Xiamen, China, 29–31 October 2010; Volume 1, pp. 108–112. [Google Scholar]
- Yang, C.D.; Yeh, F.B.; Chen, J.H. The closed-form solution of generalized proportional navigation. J. Guid. Control Dyn. 1987, 10, 216–218. [Google Scholar] [CrossRef]
- Moschetta, J.M. The aerodynamics of micro air vehicles: Technical challenges and scientific issues. Int. J. Eng. Syst. Model. Simul. 2014, 6, 134–148. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Cruise speed (m/s) | 5 |
| Minimum speed (m/s) | 2 |
| Maximum speed (m/s) | 12 |
| Maximum turn rate (deg/s) | 60 |
| Safety distance (m) | 10 |
| Desired distance (m) | 50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bassolillo, S.R.; Blasi, L.; D’Amato, E.; Mattei, M.; Notaro, I. Decentralized Triangular Guidance Algorithms for Formations of UAVs. Drones 2022, 6, 7. https://doi.org/10.3390/drones6010007
Bassolillo SR, Blasi L, D’Amato E, Mattei M, Notaro I. Decentralized Triangular Guidance Algorithms for Formations of UAVs. Drones. 2022; 6(1):7. https://doi.org/10.3390/drones6010007
Chicago/Turabian StyleBassolillo, Salvatore Rosario, Luciano Blasi, Egidio D’Amato, Massimiliano Mattei, and Immacolata Notaro. 2022. "Decentralized Triangular Guidance Algorithms for Formations of UAVs" Drones 6, no. 1: 7. https://doi.org/10.3390/drones6010007
APA StyleBassolillo, S. R., Blasi, L., D’Amato, E., Mattei, M., & Notaro, I. (2022). Decentralized Triangular Guidance Algorithms for Formations of UAVs. Drones, 6(1), 7. https://doi.org/10.3390/drones6010007