
Using Ground-Based Passive Reflectors for Improving UAV Landing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The algorithms for the operation of the automatic control system (ACS) for landing must remain standard (the same as using course–glide systems);
- The landing information support should be carried out by existing sensors [22];
- The developed algorithms of the automatic landing system should ensure its interface with other onboard systems, without their significant modification, including radar [23];
- Using an operator, the system must provide the possibility of landing in manual and director modes and in the absence of an operator, in an automatic mode;
- The system should not interfere with the landing of the aircraft using ground-based radio landing equipment during their operation, and should ensure further autonomous landing and mileage [27].
2. Navigation Systems for UAV Landing
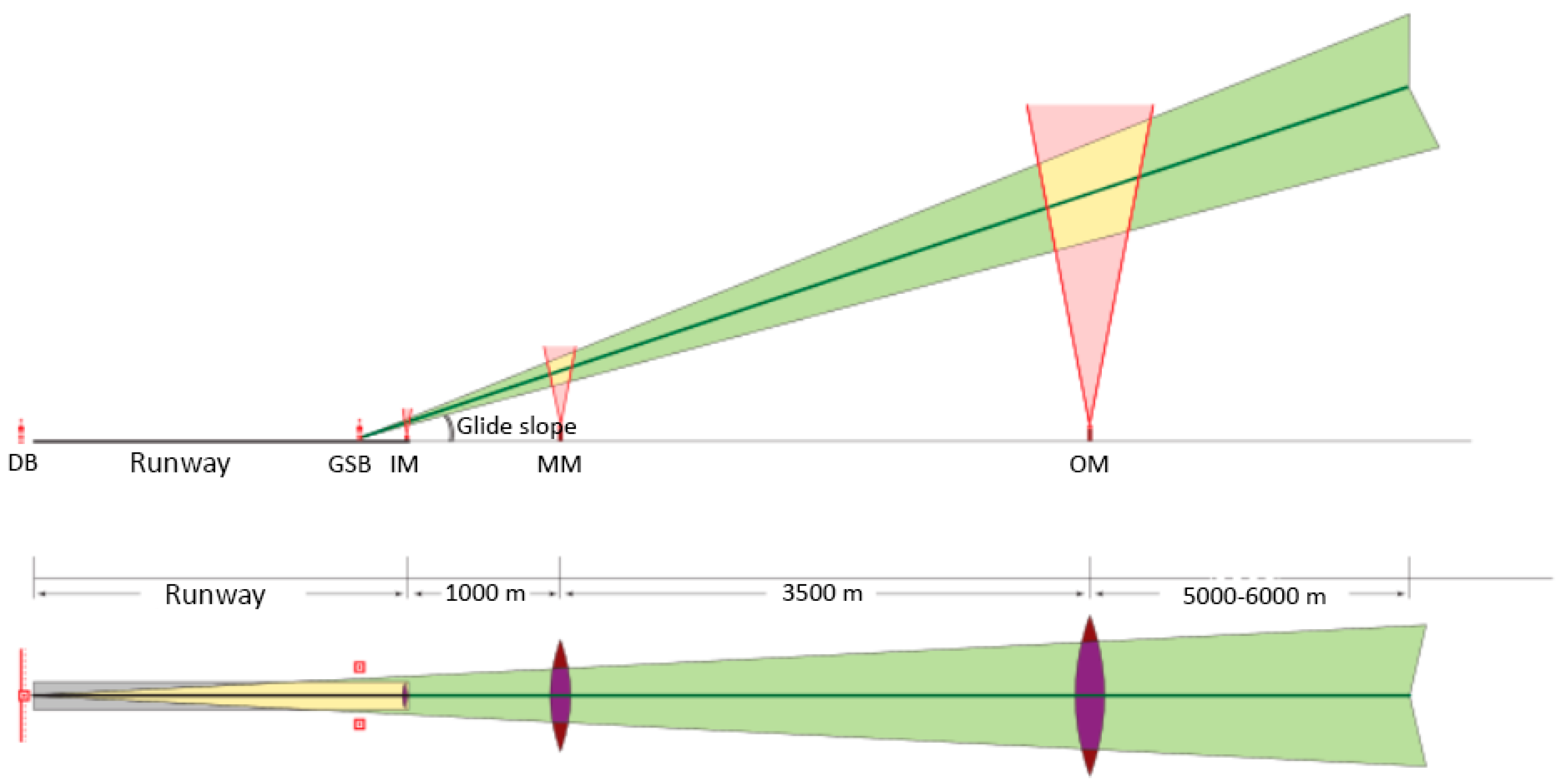
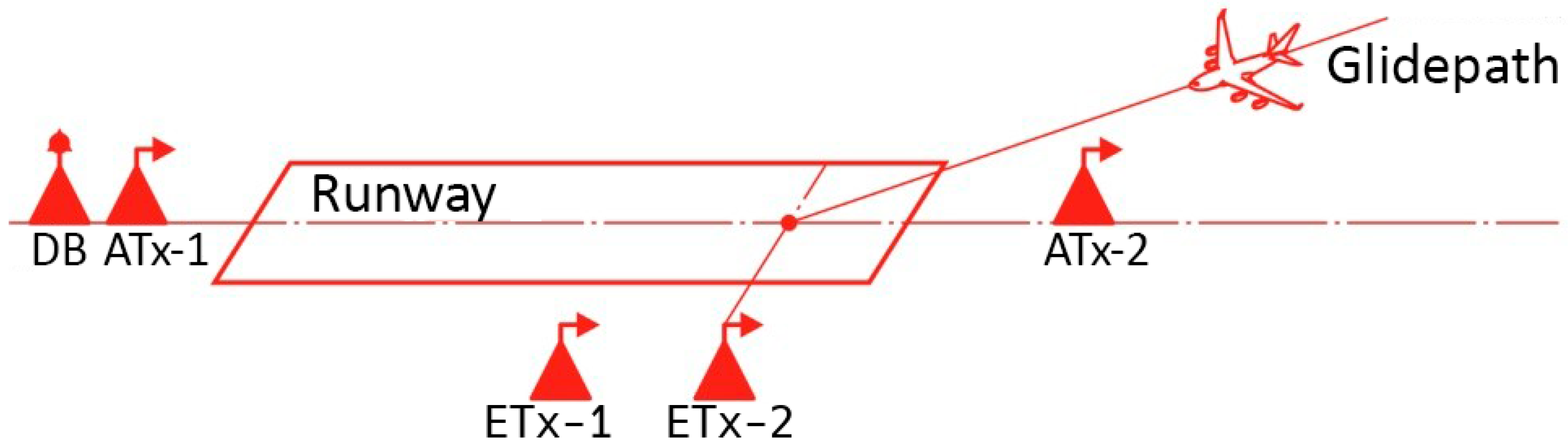
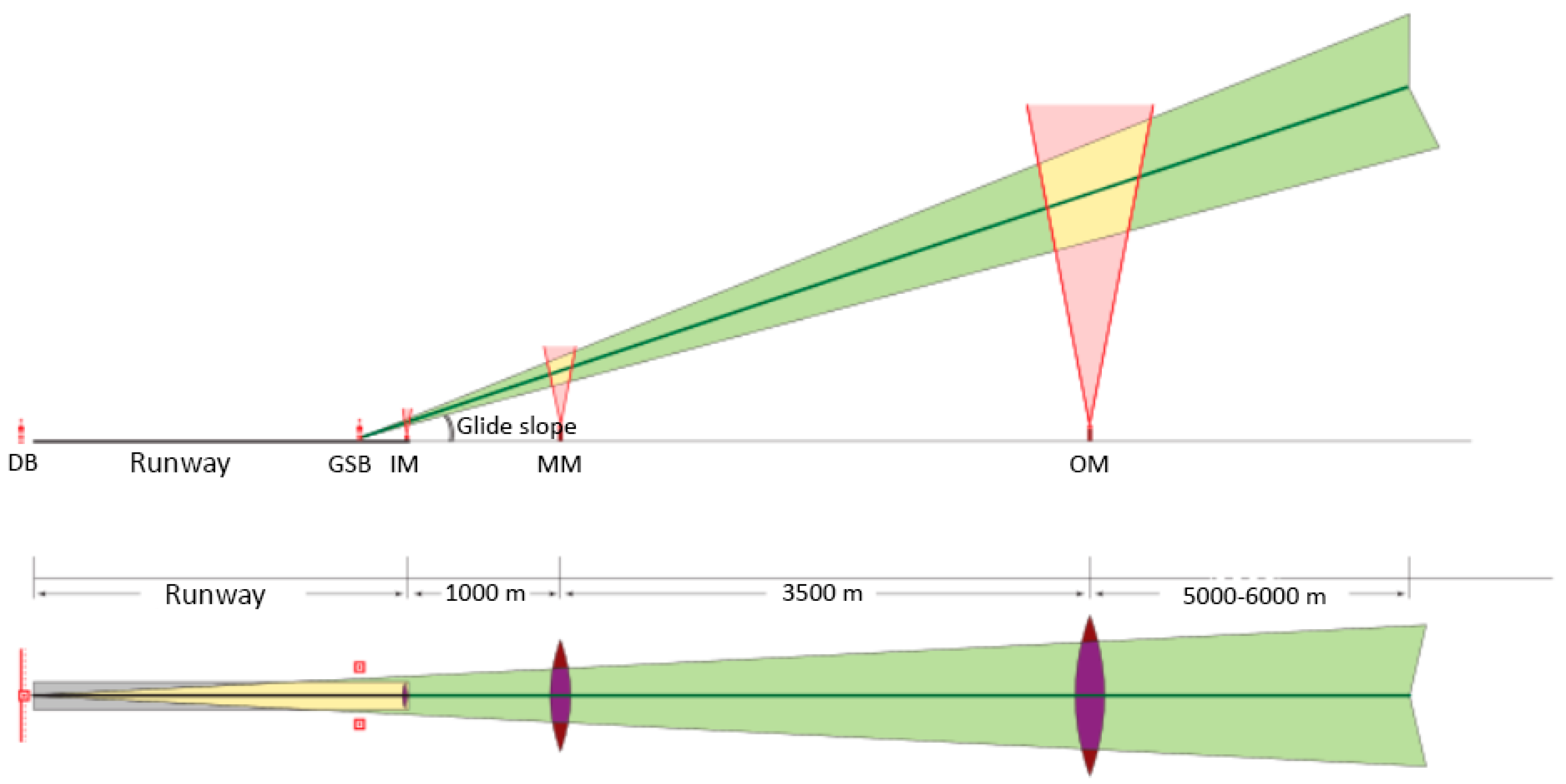
2.1. Instrumental Landing System (ILS)
2.2. Microwave Landing System (MLS)
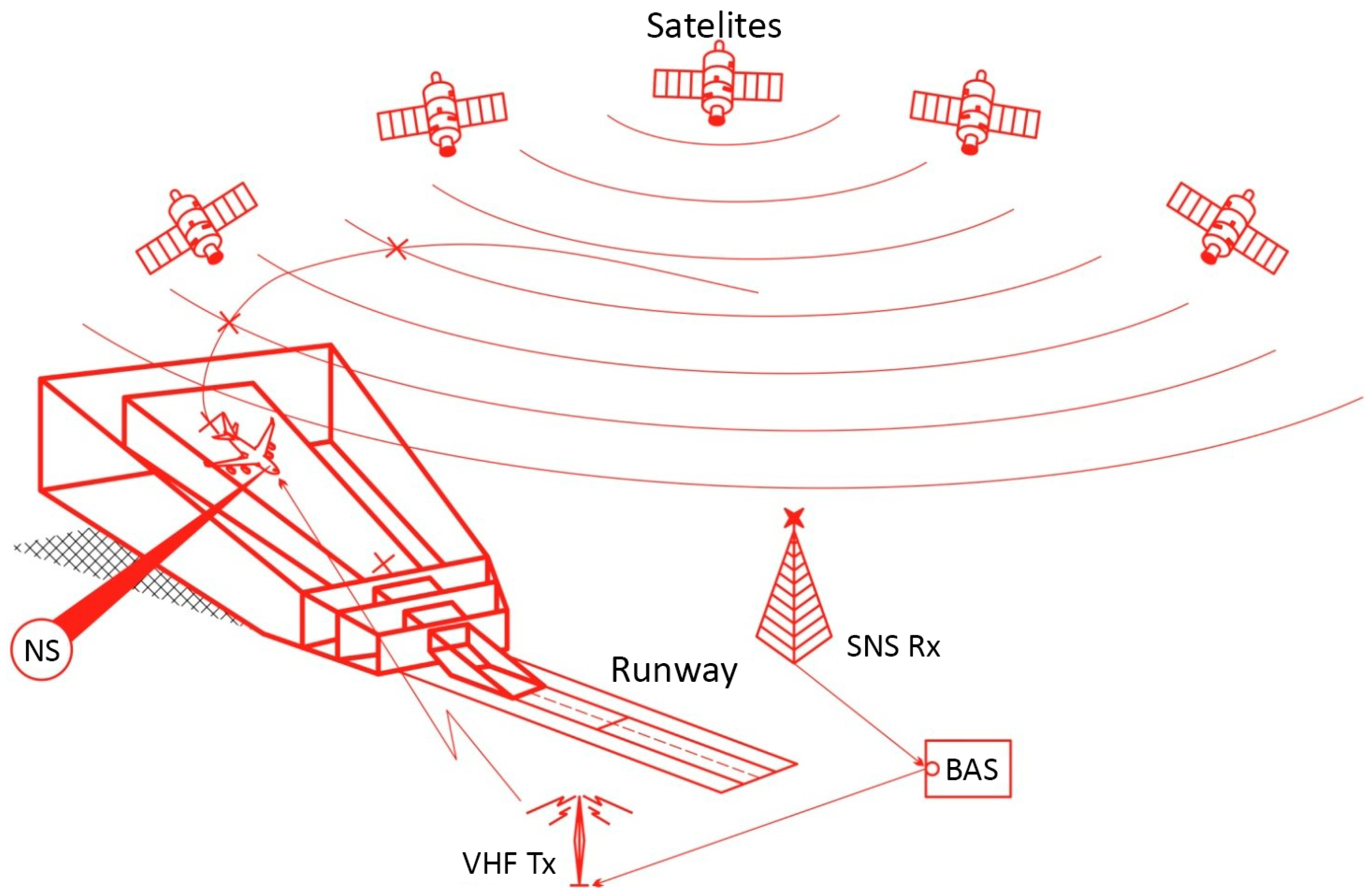
2.3. Satellite Landing System (SLS)
- Space equipment, that consists of the GPS and GLONASS satellite networks.
- Ground equipment, a supplementary Ground-Based Augmentation System (GBAS), which enables the differential mode.
- Airborne equipment, which includes the GNSS (Global Navigation Satellite System) receiver that picks up information from the satellites and local augmentation stations.
- They are sensitive to weather interference.
- The antennae might become shadowed by the aircraft structures during maneuvers.
- The SLS is sensitive to jamming that could limit its effectiveness.
- The accuracy the SLS provides is insufficient for precision landings.
- The SLS is incapable of providing accurate measurements of the aircraft altitude.
3. Algorithm Synthesis
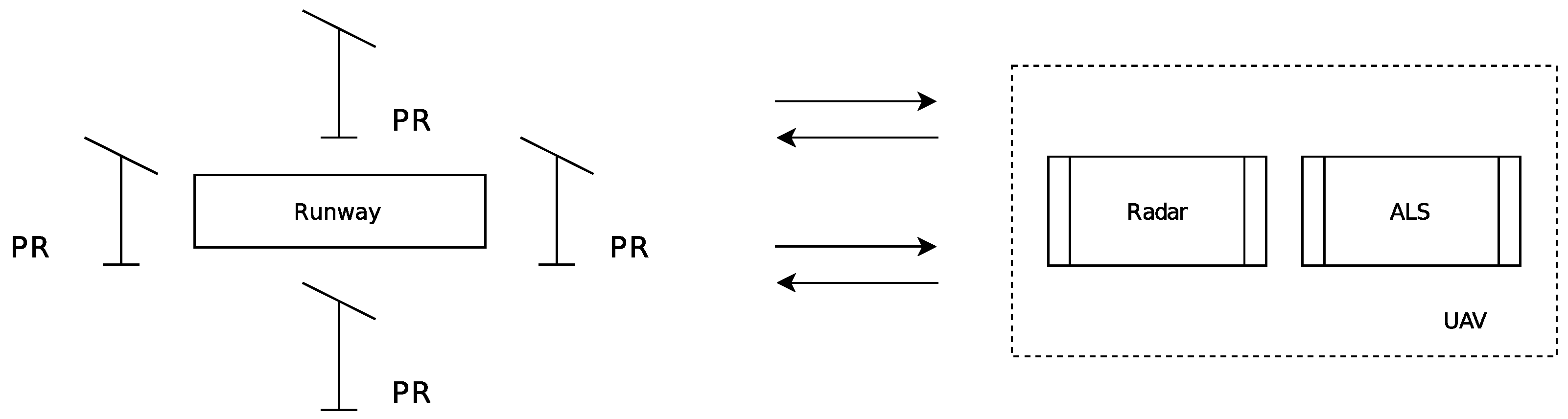
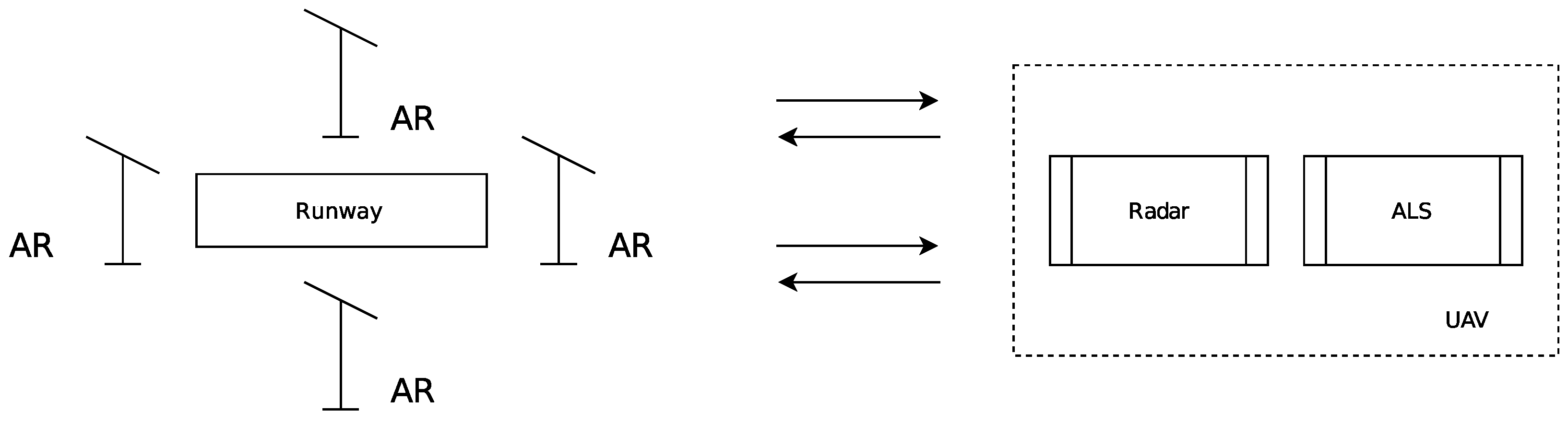
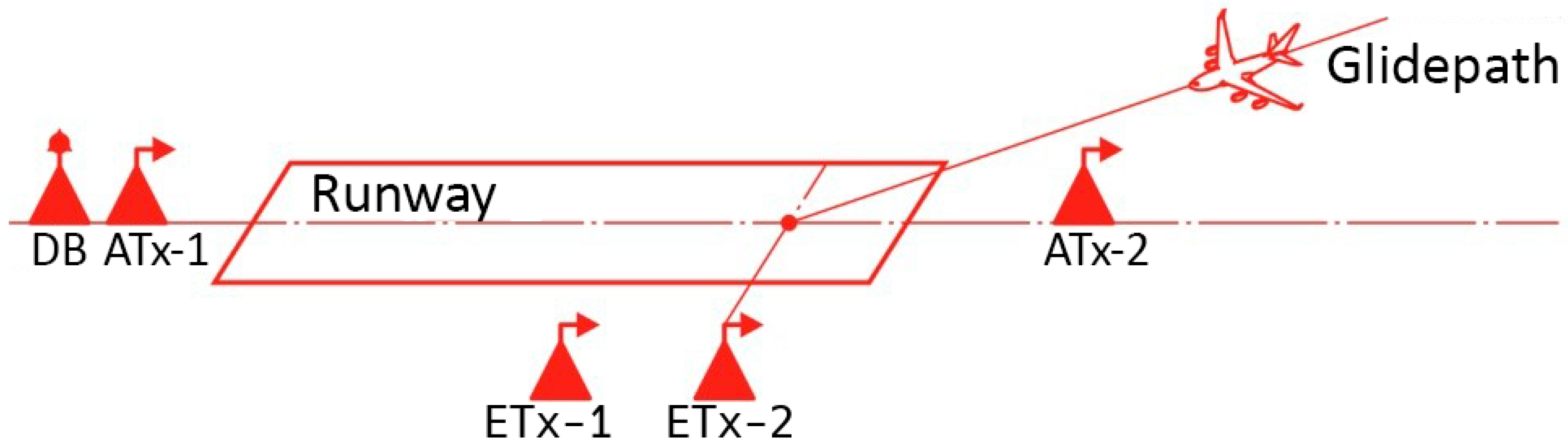
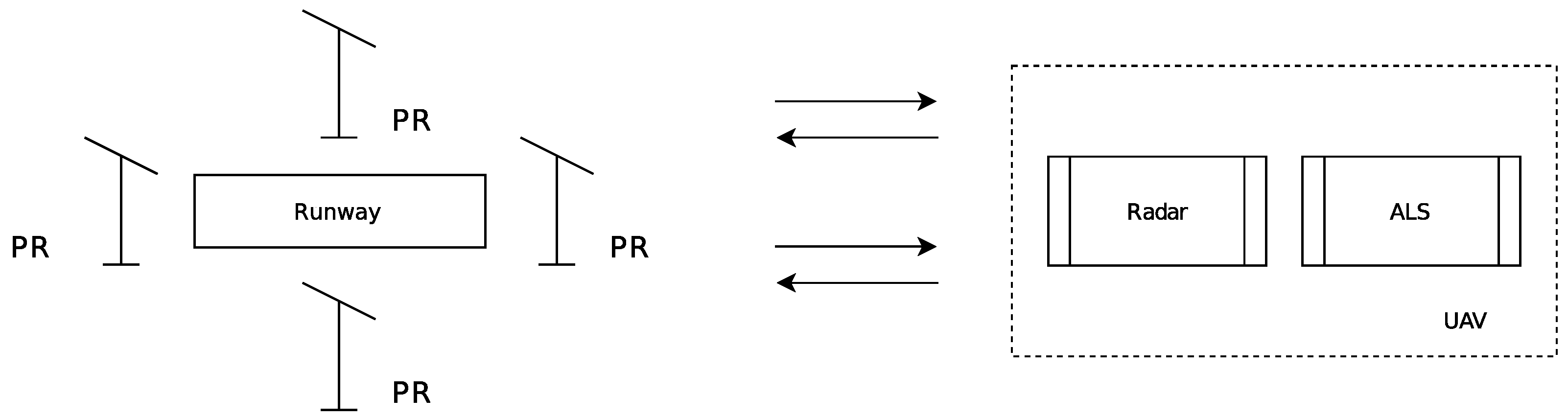
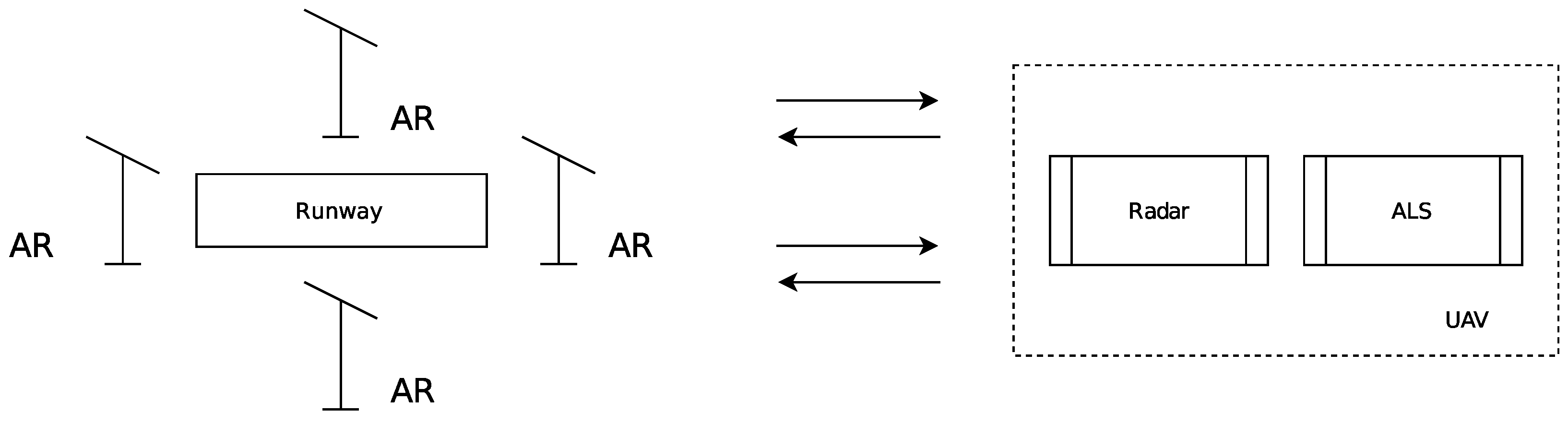
3.1. Concept Description of Using a Radar to Ensure the Aircraft’s Landing
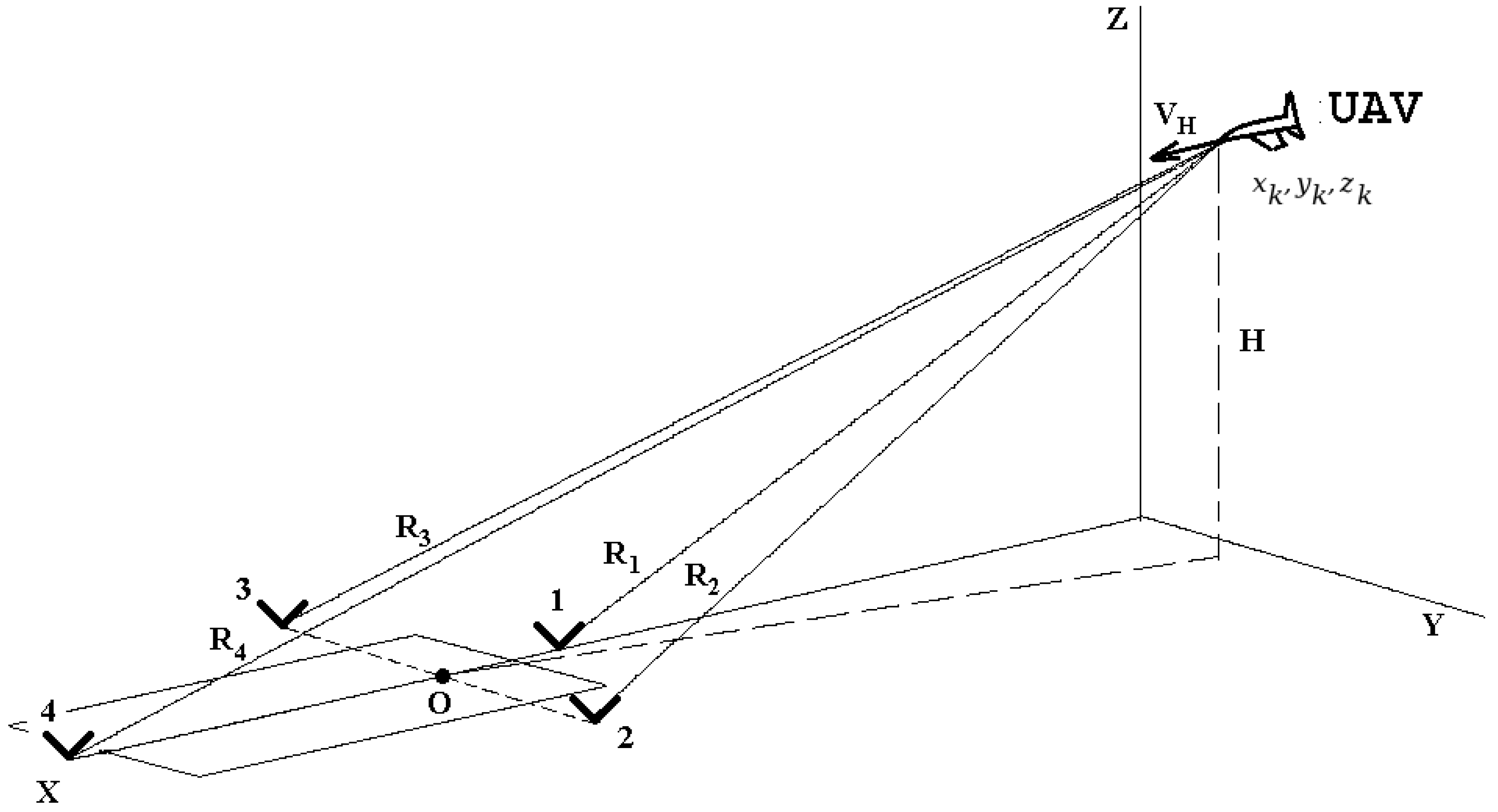
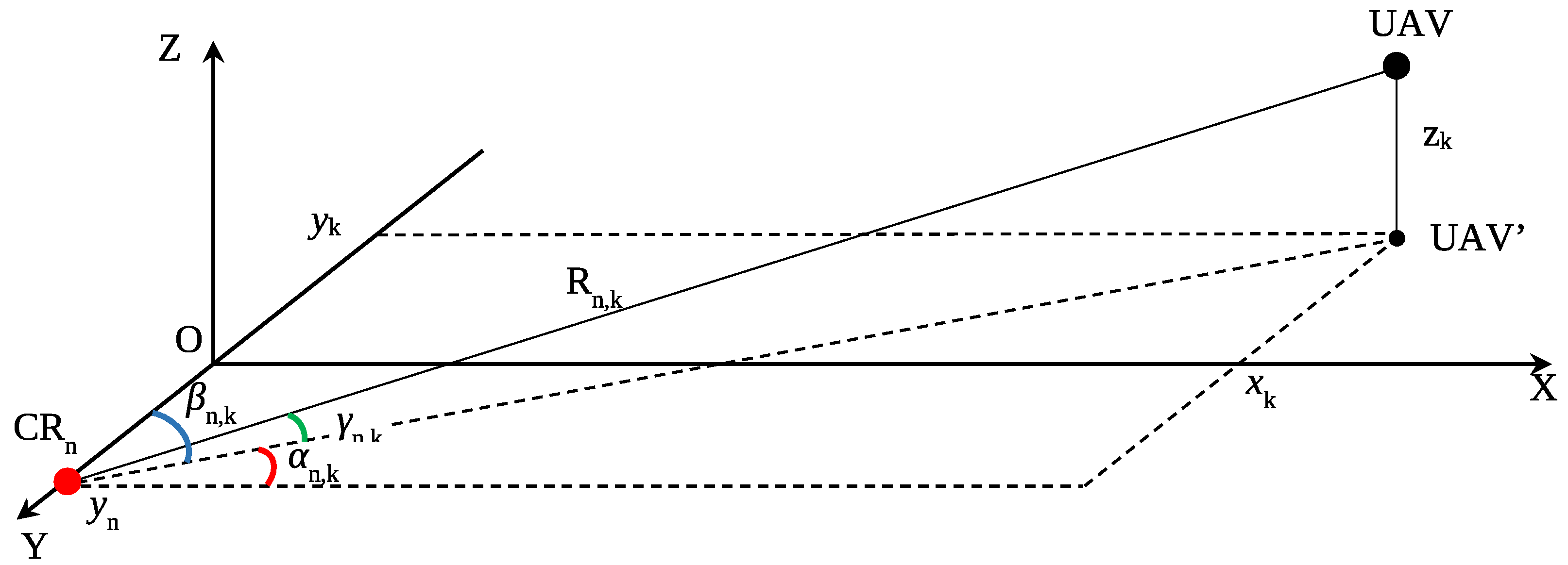
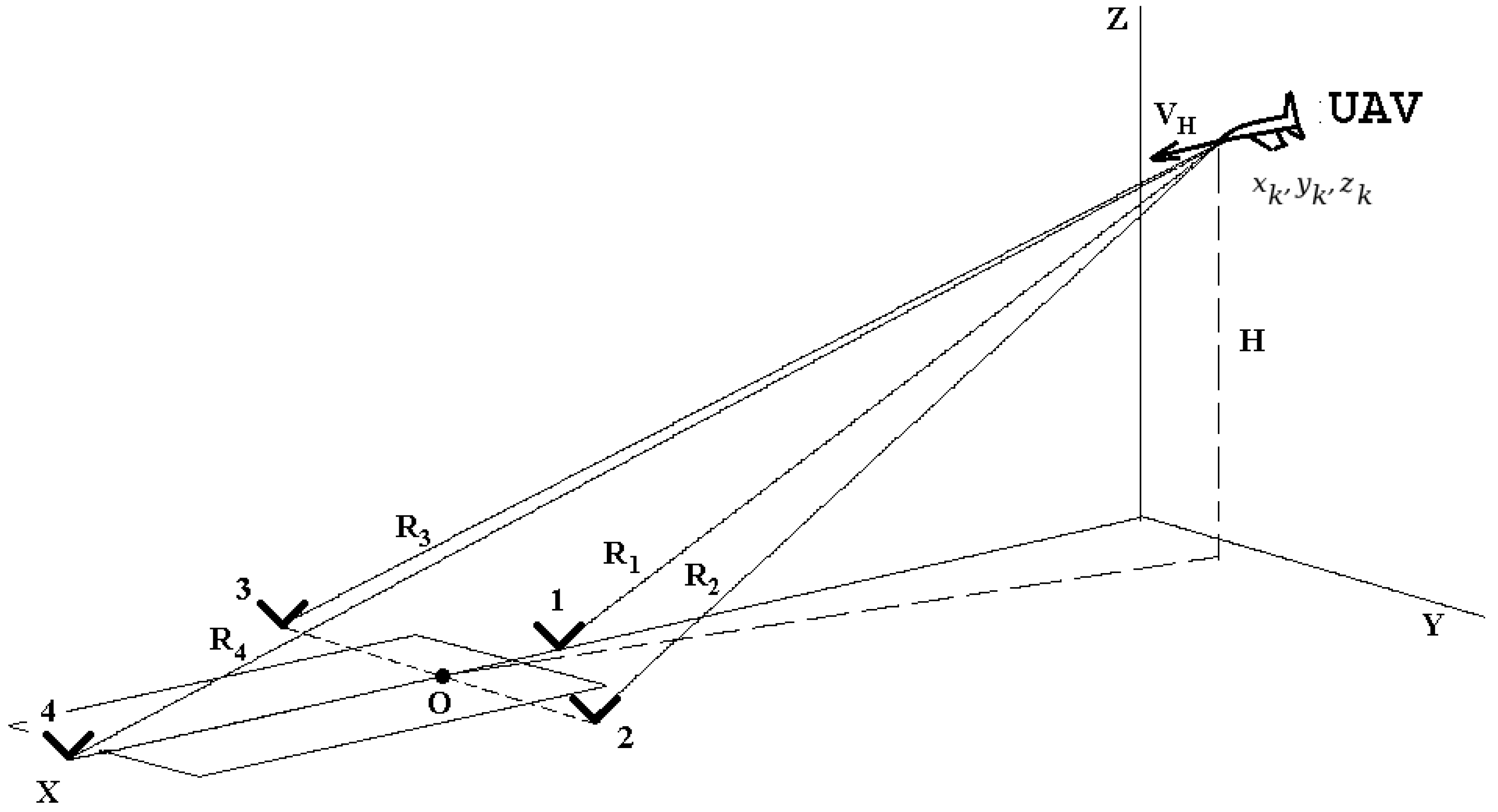
3.2. Principal Solution of the Navigation Problem in Onboard Radar
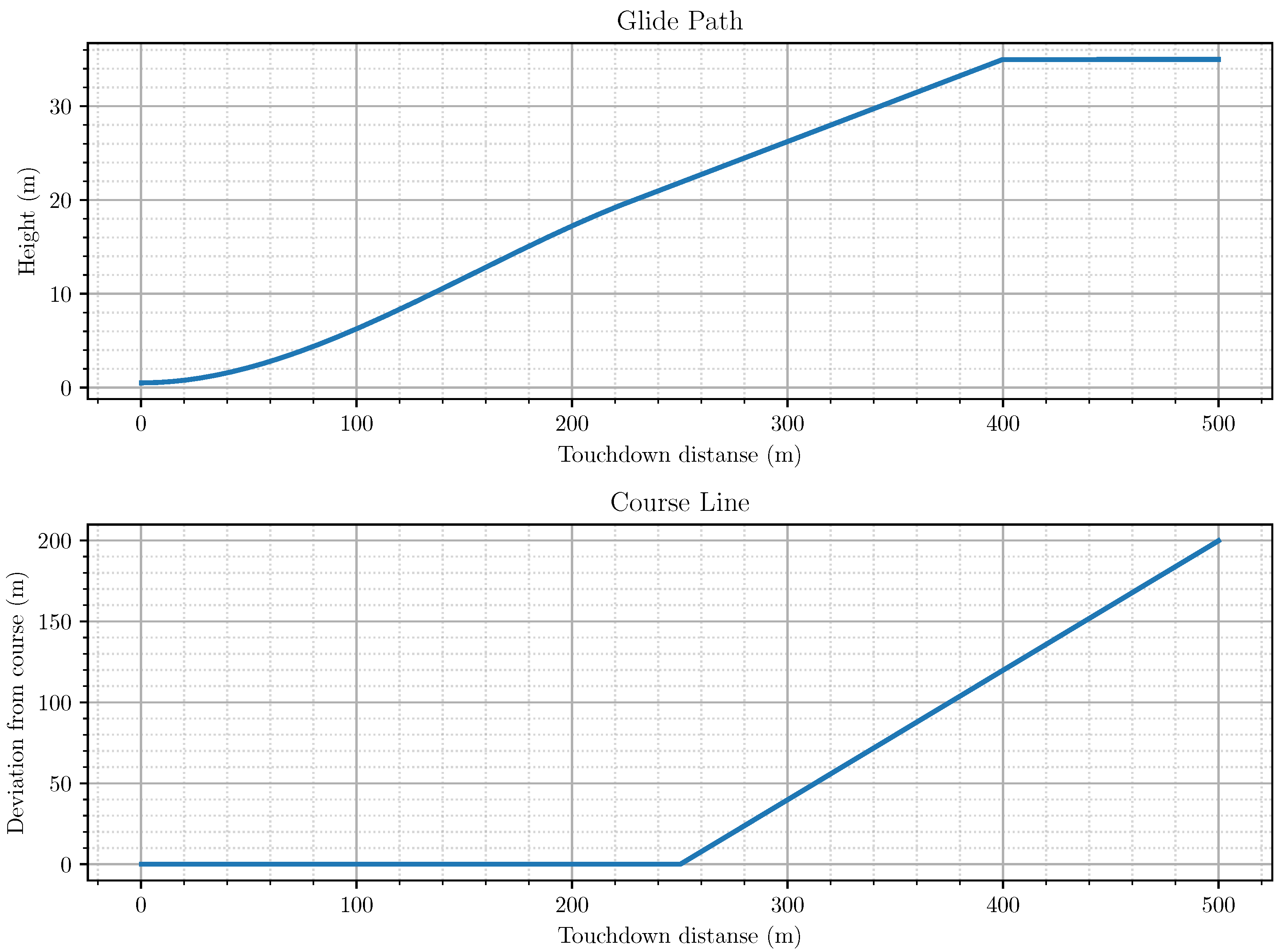
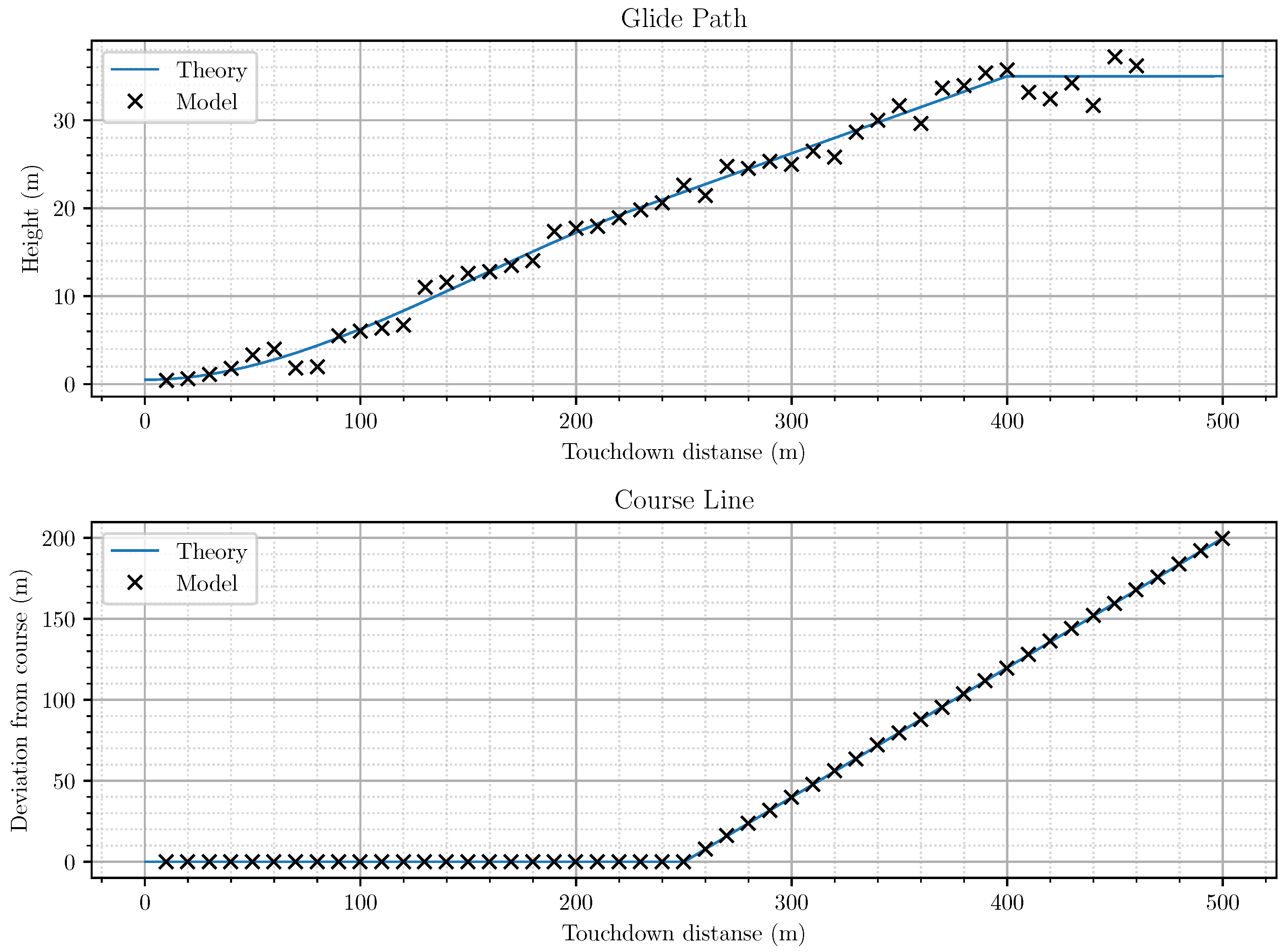
4. Results
5. Discussion
6. Conclusions
- Dissimilar to the modern aircraft landing systems, this system did not require the presence of radio engineering devices and a developed infrastructure in the runway area, that makes such systems especially relevant when it is necessary to deploy them quickly, or operate UAVs in poorly developed territories;
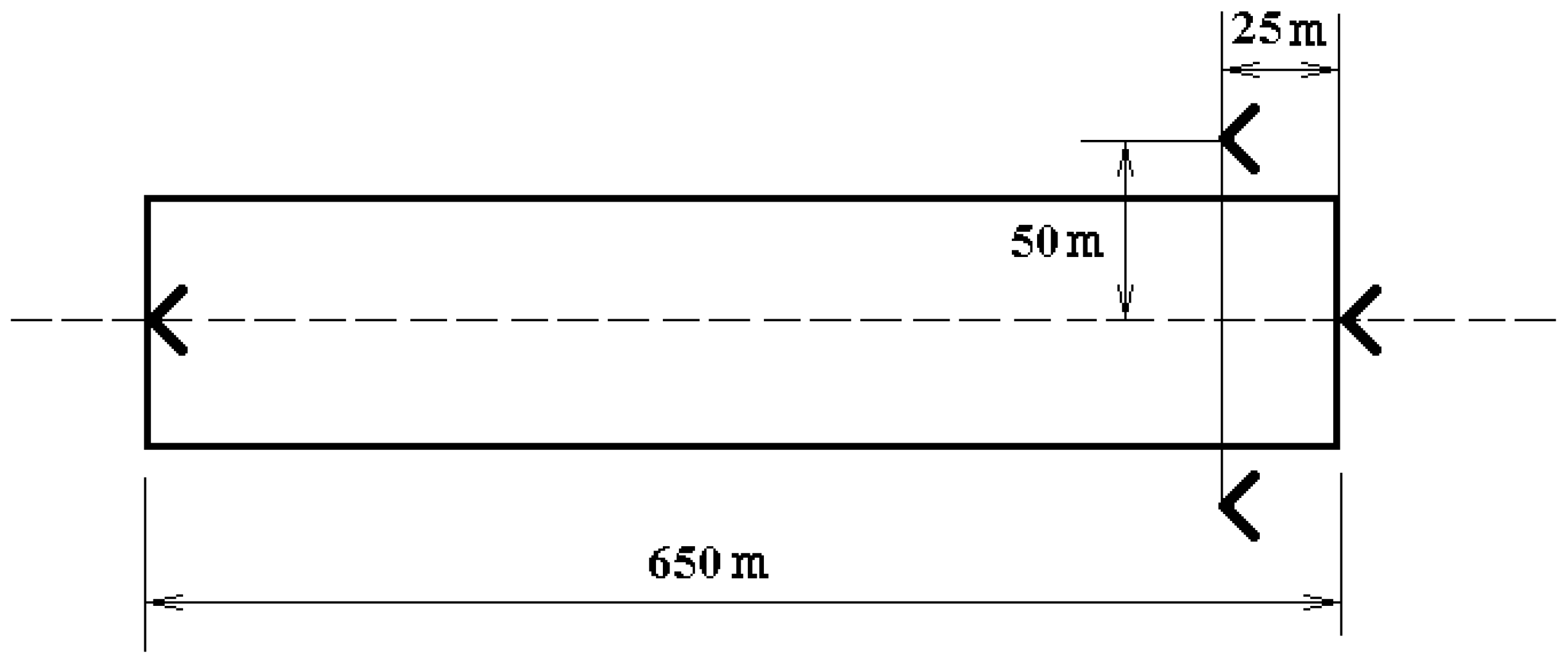
- The reflectors’ locations in the runway area should be carried out taking into account the estimated landing point and the UAV’s approach trajectory;
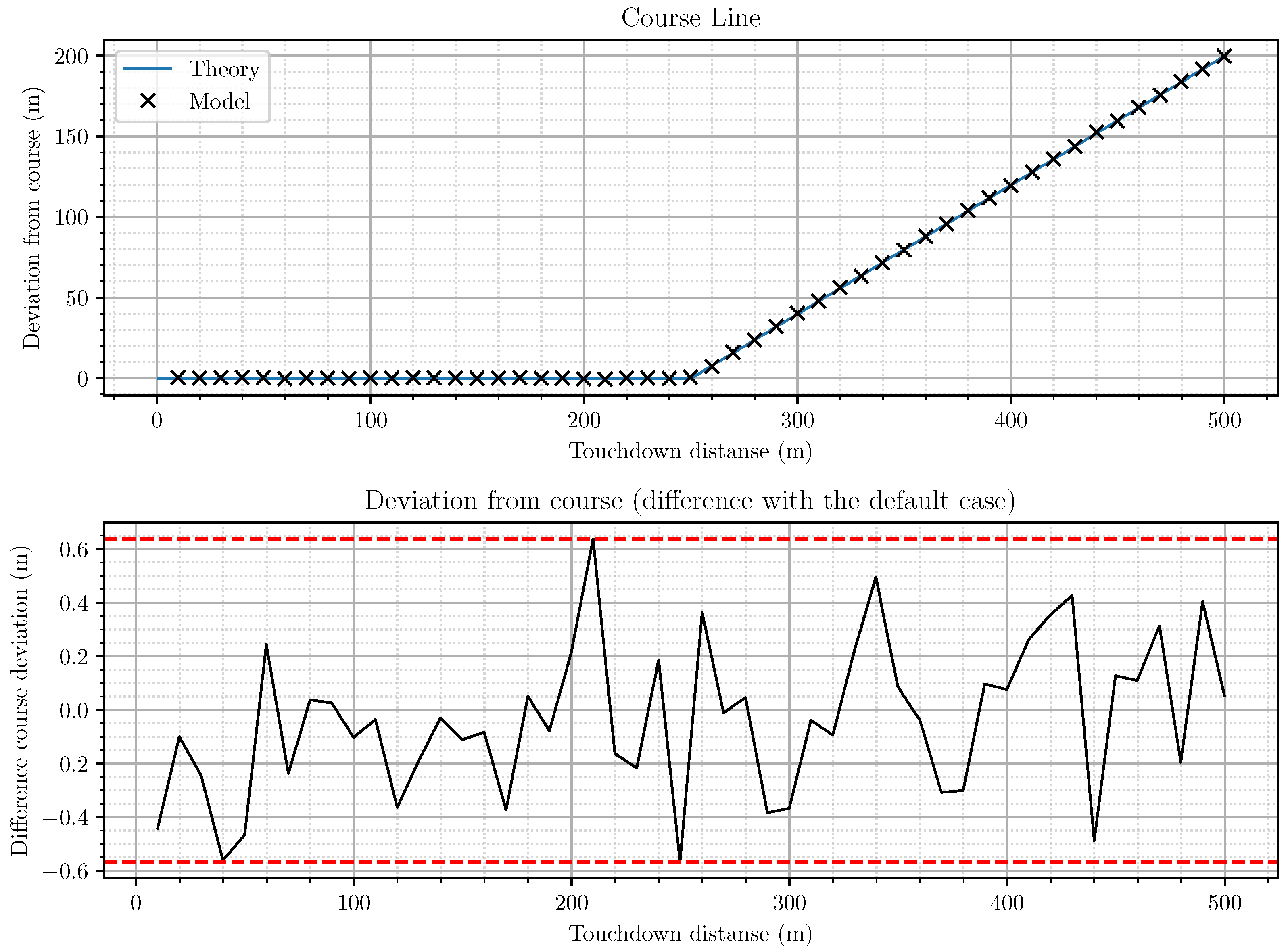
- To ensure errors in estimating the UAV’s location in the horizontal plane, it was enough to provide a base on the side reflectors of about 50 m;
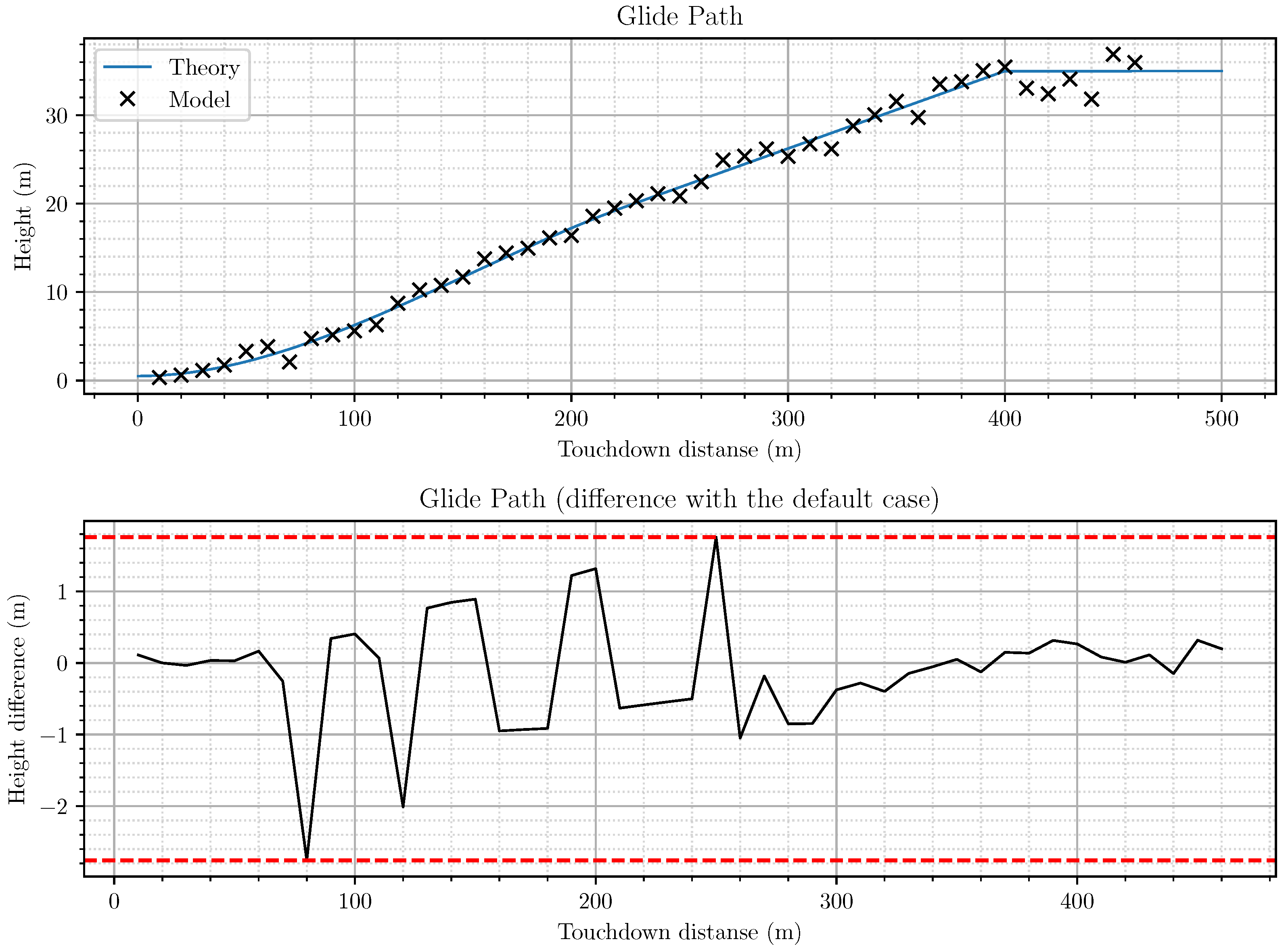
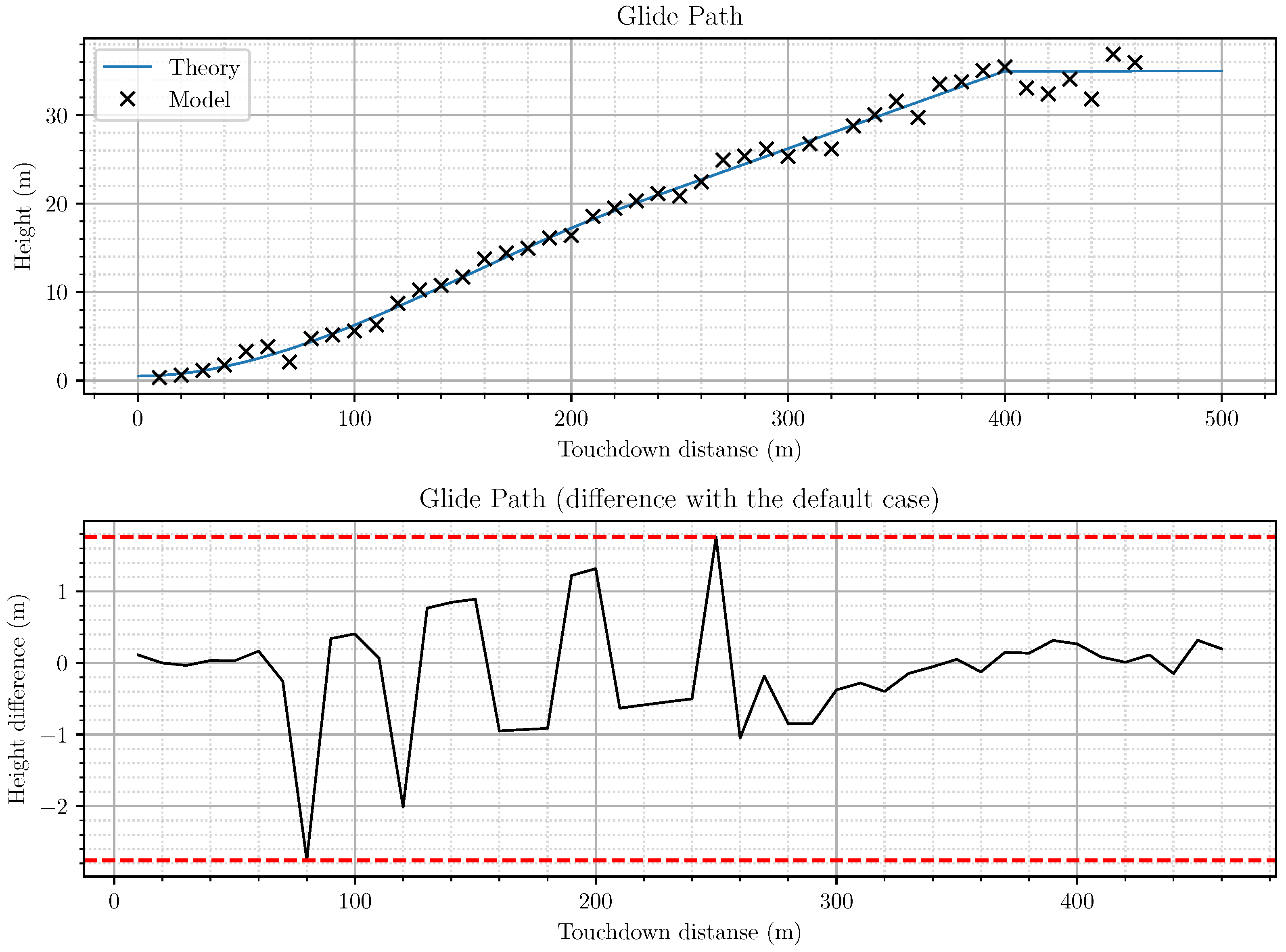
- All reflectors’ locations in the runway plane did not allow to accurately estimate the UAV’s true height, which was especially critical at the final stage of the UAV’s landing;
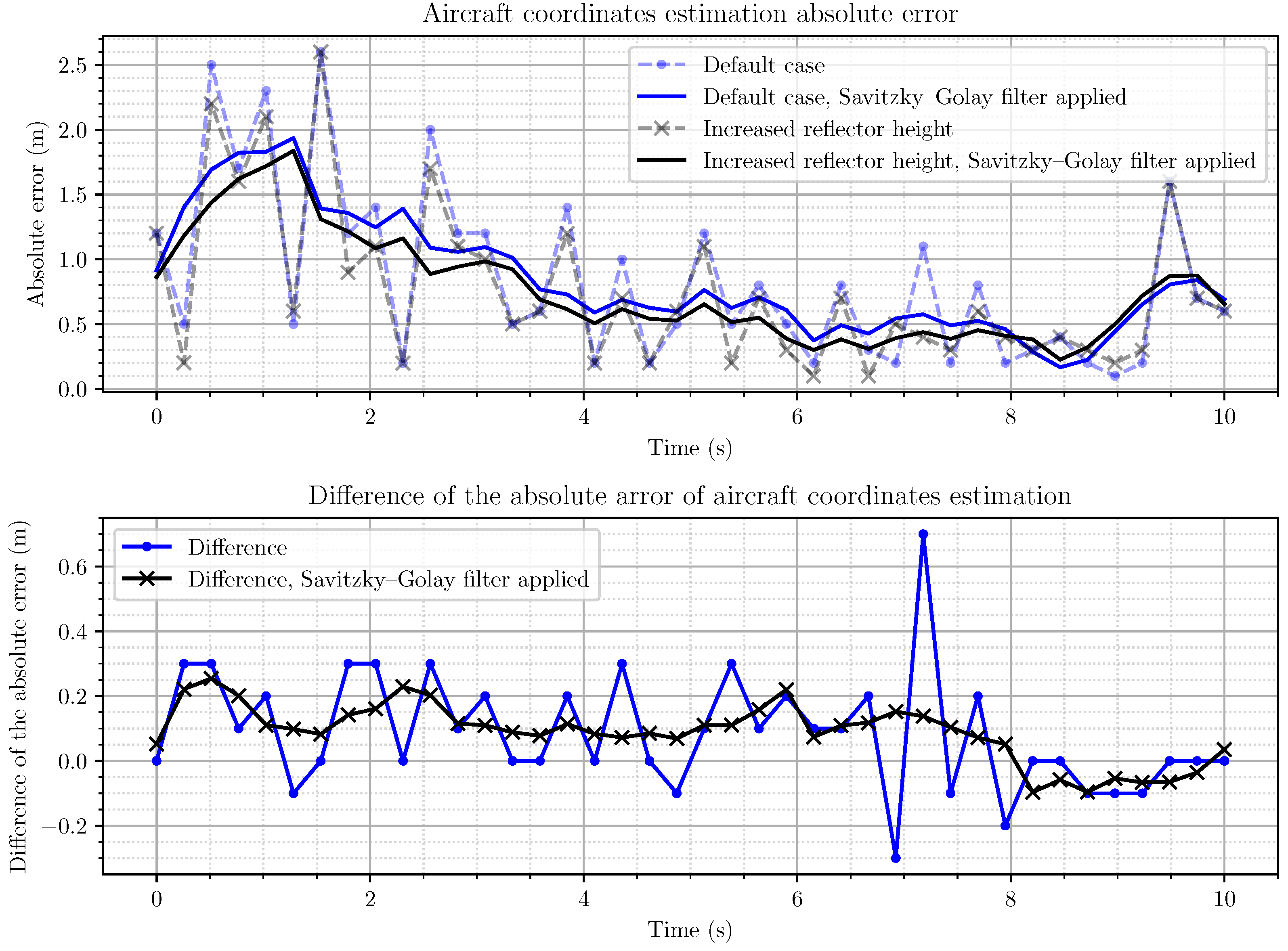
- Lifting one of the reflectors to a height of up to 20 m did not allow to obtain a significant gain in errors in determining the location and height of the UAV;
- In order to improve the accuracy of the UAV’s height estimation, it was necessary to use additional algorithms for processing received radio signals and the results of primary measurements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hughes, N.H. The influence at ATC considerations on the accuracy required from a future landing guidance system. Tech. Memo. Avion. 1971, 79. [Google Scholar]
- Sachs, G. Perspective Predictor/Flight—Path Display with Minimum Pilot Compensation. J. Guid. Control. Dyn. 2000, 23, 420–429. [Google Scholar] [CrossRef]
- Hirst, M. The Air Transport System; Woodhead Publishing: Reading, MA, USA, 2008. [Google Scholar]
- Salih, A.A.A.A.; Zhahir, A.; Ariff, O.K. Comparative Study on Aircraft Landing Instruments: Accuracies and Limitations. Appl. Mech. Mater. 2012, 225, 549. [Google Scholar] [CrossRef]
- Schroer, R. Navigation and landing—A century of powered flight 1903–2003. IEEE Aerosp. Electron. Syst. Mag. 2003, 18, 27–36. [Google Scholar] [CrossRef]
- de Haag, M.U. Terrain Referenced Integrity Monitor for an Unmanned Aircraft Systems Precision Approach. In Proceedings of the AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Ho, H.W.; Chu, Q. Automatic Landing System of a Quadrotor UAV Using Visual Servoing. In Proceedings of the 2nd CEAS Specialist Conference on Guidance, Navigation and Control, Delft, The Netherlands, 10–12 April 2013; pp. 1264–1273. [Google Scholar]
- Bloise, N. A Survey of Unmanned Aircraft System Technologies to enable Safe Operations in Urban Areas. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 433–442. [Google Scholar] [CrossRef]
- Gray, R.; Maybeck, P. An integrated GPS/INS/baro and radar altimeter system for aircraft precision approach landings. In Proceedings of the IEEE 1995 National Aerospace and Electronics Conference, NAECON 1995, Dayton, OH, USA, 22–26 May 1995; Volume 1, pp. 161–168. [Google Scholar] [CrossRef] [Green Version]
- Ko, P.Y.; Enge, P.; Powell, J. Continuity improvements via inertial augmentation of GPS-based landing system. In Proceedings of the Position Location and Navigation Symposium—PLANS ’96, Atlanta, GA, USA, 22–25 April 1996; pp. 153–160. [Google Scholar] [CrossRef]
- Wang, H.; Diao, M.; Gao, L. Low Probability of Intercept Radar Waveform Recognition Based on Dictionary Leaming. In Proceedings of the 2018 10th International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 18–20 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hall, T.; Soares, M. Analysis of localizer and glide slope Flight Technical Error. In Proceedings of the IEEE/AIAA 27th Digital Avionics Systems Conference, St. Paul, MN, USA, 9 December 2008; pp. 2–9. [Google Scholar] [CrossRef] [Green Version]
- Kayton, M.; Fried, W.R. Landing guidance. In Avionics Navigation Systems, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 1997; pp. 597–641. [Google Scholar]
- Korn, B.; Doehler, H. Passive landing aids for precision EVS approach and landing. Digit. Avion. Syst. Conf. 2003, 2, 1–8. [Google Scholar] [CrossRef]
- Loss, K.; Nicosia, J.; Taylor, G. Autonomous precision approach and landing system APALS. In Proceedings of the IEEE National Telesystems Conference—NTC ’94, San Diego, CA, USA, 26–28 May 1994; pp. 195–198. [Google Scholar] [CrossRef]
- Borst, C.; Mulder, M.; Paassen, M.V.; Mulder, J. Path-oriented control/display augmentation for perspective flight-path displays. J. Guid. Control. Dyn. 2006, 29, 780–791. [Google Scholar] [CrossRef]
- Hess, R.A. Unified theory for aircraft handling qualities and adverse aircraft pilot coupling. J. Guid. Dyn. 1997, 20, 1141–1148. [Google Scholar] [CrossRef]
- Ma, J.; Huang, G.; Zuo, W.; Wu, X.; Gao, J. Robust radar waveform recognition algorithm based on random projections and sparse classification. IET Radar Sonar Navig. 2014, 8, 290–296. [Google Scholar] [CrossRef]
- Ming, Z.; Lutao, L.; Ming, D. LPI Radar Waveform Recognition Based on Time-Frequency Distribution. Sensors 2016, 16, 1682–1701. [Google Scholar]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning. Ind. Inform. IEEE Trans. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Shevgunov, T. Using artificial neural networks for time difference of arrival target localization based on reduced discrete cosine transform. Period. Tche Quim. 2019, 16, 530–540. [Google Scholar] [CrossRef]
- Shevgunov, T.; Vavilova, Z.; Guschina, O.; Efimov, E. Heuristic Global Optimization Algorithm for Estimating a Radio Source Location by a Passive Radar System. TEM J. 2020, 9, 427–433. [Google Scholar] [CrossRef]
- Liu, G.; Gu, H.; Su, W.; Sun, H. The analysis and design of modern Low Probability of Intercept radar. In Proceedings of the 2001 CIE International Conference on Radar Proceedings (Cat No.01TH8559), Beijing, China, 15–18 October 2001; pp. 120–124. [Google Scholar] [CrossRef]
- Chen, H.; Wang, X.; Li, Y. A Survey of Autonomous Control for UAV. In Proceedings of the 2009 International Conference on Artificial Intelligence and Computational Intelligence, Shanghai, China, 7–8 November 2009; pp. 267–271. [Google Scholar] [CrossRef]
- Dougherty, J.; Lee, D.; Lee, T. Laser-based guidance of a quadrotor uav for precise landing on an inclined surface. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1210–1215. [Google Scholar] [CrossRef]
- Kaloshin, G.A. Scientific fundamentals of laser aids for low visibility approach landing of aircraft. Technical Digest. CLEO/Pacific Rim 2001. In Proceedings of the 4th Pacific Rim Conference on Lasers and Electro-Optics (Cat. No.01TH8557), Chiba, Japan, 15–19 July 2001. [Google Scholar] [CrossRef]
- Schleher, D. Low probability of intercept radar. In Proceedings of the IEEE 1985 International Radar Conference, Arlington, VA, USA, 6–9 May 1985; pp. 346–349. [Google Scholar]
- Shevgunov, T.; Dubrovin, A.; Nikishov, V. Next-Generation Landing System Based on Combined Passive Radar. In Proceedings of the XXXI General Assembly of the International Union of Radio Science (URSI GASS 2014), Beijing, China, 16–23 August 2014. [Google Scholar] [CrossRef]
- Salih, A.A.A.A.; Ariff, O.K.; Zhahir, A.; Ahmad, M.T. Modeling and simulation of a high accurate aircraft ground-based positioning and landing system. In Proceedings of the Space Science and Communication (IconSpace) 2013 IEEE International Conference on, Melaka, Malaysia, 1–3 July 2013; pp. 324–330. [Google Scholar] [CrossRef]
- Anderson, E.; Fannin, T.; Nelson, B. Levels of Aviation Autonomy. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Brooker, G.; Carter, T. A Millimetre Wave Radar Sensor for Autonomous Navigation and Landing. In Proceedings of the Australian Conference on Robotics and Automation, Melbourne, Australia, 30 August–1 September 2000; pp. 59–64. [Google Scholar]
- Gui, Y.; Guo, P.; Zhang, H.; Lei, Z.; Zhou, X.; Du, J.; Yu, Q. Airborne Vision-Based Navigation Method for UAV Accuracy Landing Using Infrared Lamps. J. Intell. Robot. Syst. 2013, 72, 197–218. [Google Scholar] [CrossRef]
- Mercado-Ravell, D.A. Autonomous Navigation and Teleoperation of Unmanned Aerial Vehicles Using Monocular Vision. Ph.D. Thesis, Université de Technologie de Compiègne, Guanajuato, Mexico, 2015. [Google Scholar]
- Kong, W.; Zhou, D.; Zhang, Y.; Zhang, D.; Wang, X.; Zhao, B.; Yan, C.; Shen, L.; Zhang, J. A ground-based optical system for autonomous landing of a fixed wing UAV. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4797–4804. [Google Scholar] [CrossRef]
- Kong, W.; Hu, T.; Zhang, D.; Shen, L.; Zhang, J. Localization Framework for Real-Time UAV Autonomous Landing: An On-Ground Deployed Visual Approach. Sensors 2017, 17, 1437. [Google Scholar] [CrossRef] [Green Version]
- Jackson, W.E. Status of instrument landing systems. Proc. IRE 1938, 26, 681–699. [Google Scholar] [CrossRef]
- Kramar, E. Instrument landing systems. Interavia 1972, 27, 246. [Google Scholar]
- Poritzky, S. Seeking a new precision approach and landing system—A test of maturity. In Proceedings of the American Institute of Aeronautics and Astronautics, 2nd Aircraft Design and Operations Meeting, Los Angeles, CA, USA, 20–22 July 1970. [Google Scholar]
- Barbieri, G.G.M.; Claudio, E.D.D.; Parisi, R. Sensor arrays for improved instrumental landing systems. In Proceedings of the 2000 IEEE Sensor Array and Multichannel Signal Processing Workshop, SAM 2000 (Cat. No.00EX410), Cambridge, MA, USA, 17 March 2000; pp. 530–534. [Google Scholar] [CrossRef]
- Sanders, L.; Fritch, V. Instrument Landing Systems. IEEE Trans. Commun. 1973, 21, 435–454. [Google Scholar] [CrossRef]
- Viret, C. Microwave aircraft digital guidance equipment—Description of the system. In Proceedings of the Electronics and Civil International Conference, Paris, France, 26–30 June 1972; pp. 987–1002. [Google Scholar]
- Lanman, M.H. An Investigation of Microwave Landing System Signal Requirements for Conventionally Equipped Civilian Aircraft; Transportation Systems Center: Cambridge, MA, USA, 1971. [Google Scholar]
- Cherry, G.W.; MacKinnon, D.; Dewolf, B. Increasing airport capacity and terminal area safety by means of the scanning beam instrument landing system. Trans. Instrum. Soc. Am. 1971, 10, 67–82. [Google Scholar]
- Hughes, N.H.; Watling, K.; Harlow, R.A.; Smith, M.E. A Study of the Interface between Air Traffic Control and the Microwave Landing System; Federal Aviation Administration, Systems Research and Development Service: Washington, DC, USA, 1972. [Google Scholar]
- Khatun, M.; Mehrpouyan, H.; Matolak, D.; Guvenc, I. Millimeter wave systems for airports and short-range aviation communications: A survey of the current channel models at mmWave frequencies. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Dubrovin, A.; Nikishov, V.; Shevgunov, T. Combined AOA/TDOA Passive Radar for Airport Landing System. In Proceedings of the Tyrrhenian International Workshop on Digital Communication: Enhanced Surveillance of Aircraft and Vehicles (ESAV-2014), Rome, Italy, 15–16 September 2014; pp. 87–92. [Google Scholar] [CrossRef]
- Johnson, W.A.; McRuer, D.T. Development of a Category II Approach System Model; National Aeronautics and Space Administration: Washington, DC, USA, 1969. [Google Scholar]
- Efimov, E.; Shevgunov, T.; Valaytite, A.; Sadovskaya, E. Artificial Neural Network Based Signal Processing for Perspective Onboard Systems. In Proceedings of the 29th Congress of International Council of the Aeronautical Sciences (ICAS-2014), St. Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Efimov, E.; Shevgunov, T. Radar Target Identification Based on Feature Extraction Performed with RBF Artificial Neural Networks. In Proceedings of the XXXI General Assembly of the International Union of Radio Science (URSI GASS 2014), Beijing, China, 16–23 August 2014. [Google Scholar] [CrossRef]
- Vladimir, L.O. A Tactical Aircraft Landing Aid. IEEE Trans. Aerosp. Electron. Syst. 1966, 2, 679–684. [Google Scholar] [CrossRef]
- Zekavat, R.; Buehrer, R.M. Handbook of Position Location: Theory, Practice, and Advances; Wiley-IEEE Press: Reading, MA, USA, 2019. [Google Scholar]
- Guochang, X. GPS. Theory, Algorithms and Application; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Parkinson, B.; Spilker, J. Global Positioning System: Theory and Application; AIAA. Inc.: Reston, VA, USA, 1996; Volume 1. [Google Scholar]
- Artyushenko, V.; Volovach, V.; Vasilevich, I. Estimation of the Effect of Multiplicative Noise on Signal Detection against the background of Additive Noise. In Proceedings of the 2020 Moscow Workshop on Electronic and Networking Technologies (MWENT), Moscow, Russia, 9–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Schafer, R.W. What Is a Savitzky-Golay Filter? [Lecture Notes]. IEEE Signal Process. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]
- Candan, Ç.; Inan, H. A unified framework for derivation and implementation of Savitzky–Golay filters. Signal Process. 2014, 104, 203–211. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yasentsev, D.; Shevgunov, T.; Efimov, E.; Tatarskiy, B. Using Ground-Based Passive Reflectors for Improving UAV Landing. Drones 2021, 5, 137. https://doi.org/10.3390/drones5040137
Yasentsev D, Shevgunov T, Efimov E, Tatarskiy B. Using Ground-Based Passive Reflectors for Improving UAV Landing. Drones. 2021; 5(4):137. https://doi.org/10.3390/drones5040137
Chicago/Turabian StyleYasentsev, Dmitry, Timofey Shevgunov, Evgeny Efimov, and Boris Tatarskiy. 2021. "Using Ground-Based Passive Reflectors for Improving UAV Landing" Drones 5, no. 4: 137. https://doi.org/10.3390/drones5040137
APA StyleYasentsev, D., Shevgunov, T., Efimov, E., & Tatarskiy, B. (2021). Using Ground-Based Passive Reflectors for Improving UAV Landing. Drones, 5(4), 137. https://doi.org/10.3390/drones5040137