
UAV-Enabled Mobile Edge-Computing for IoT Based on AI: A Comprehensive Review

 , ,
, ,  and
and
Abstract
:1. Introduction
2. UAV System Model
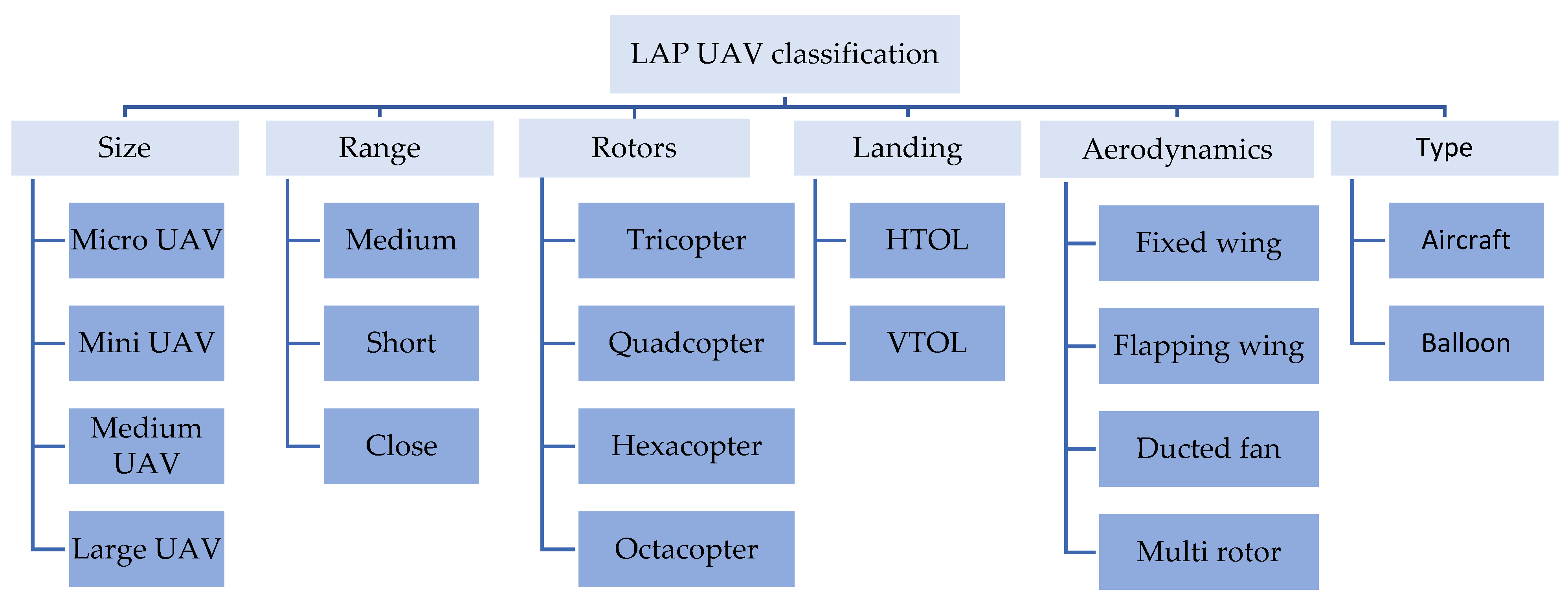
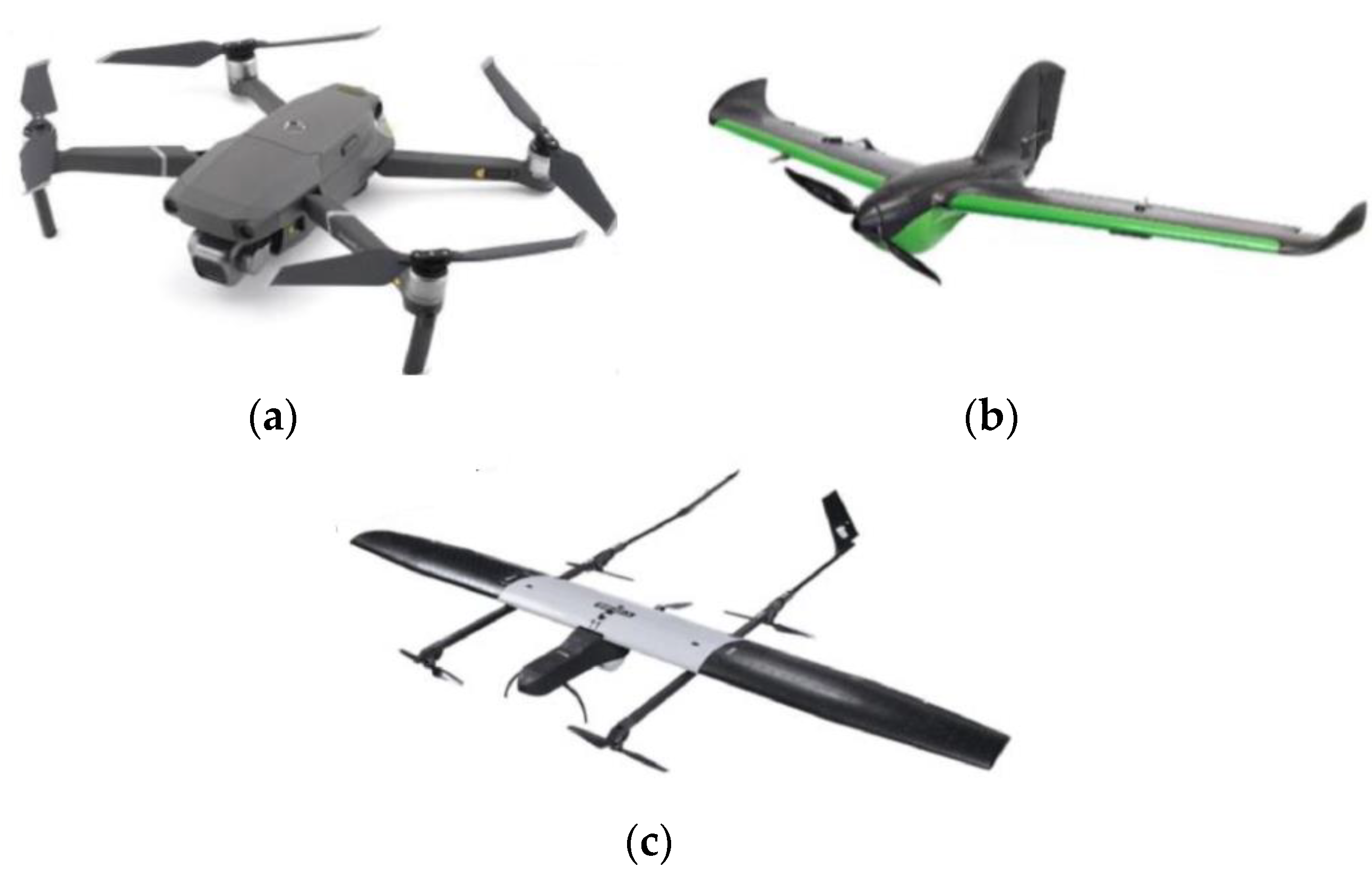
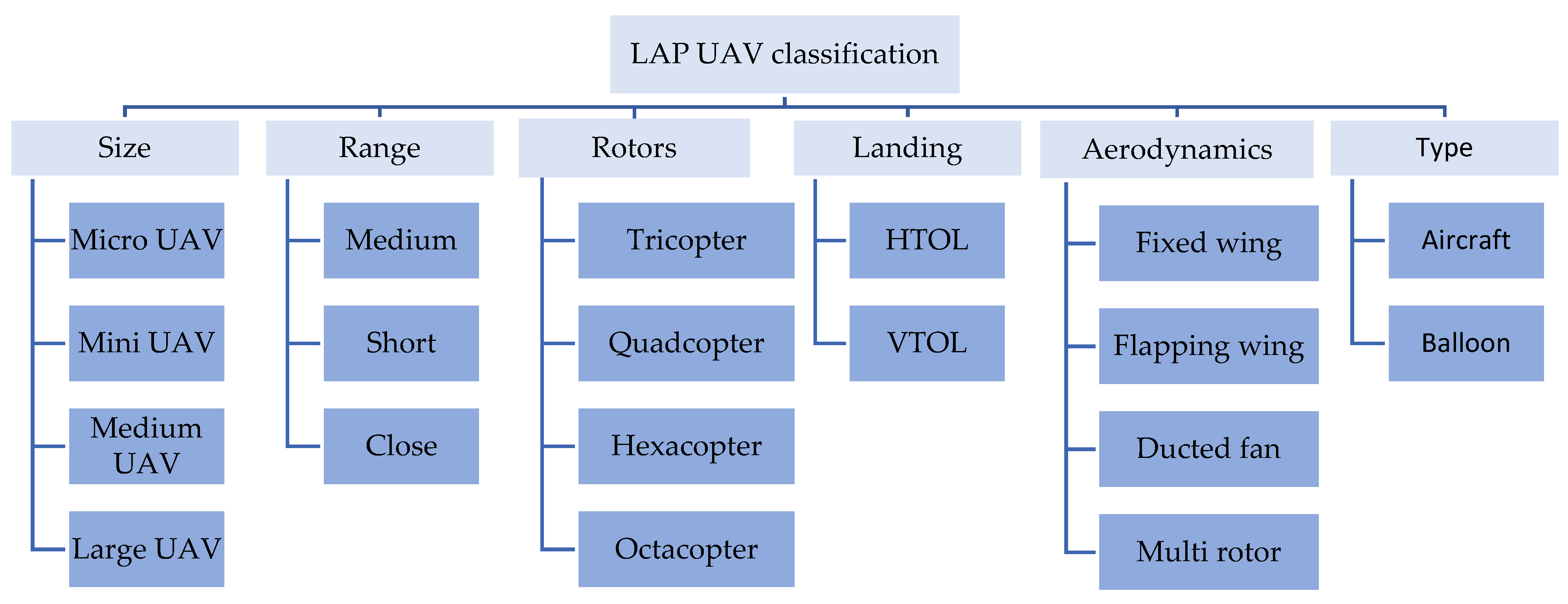
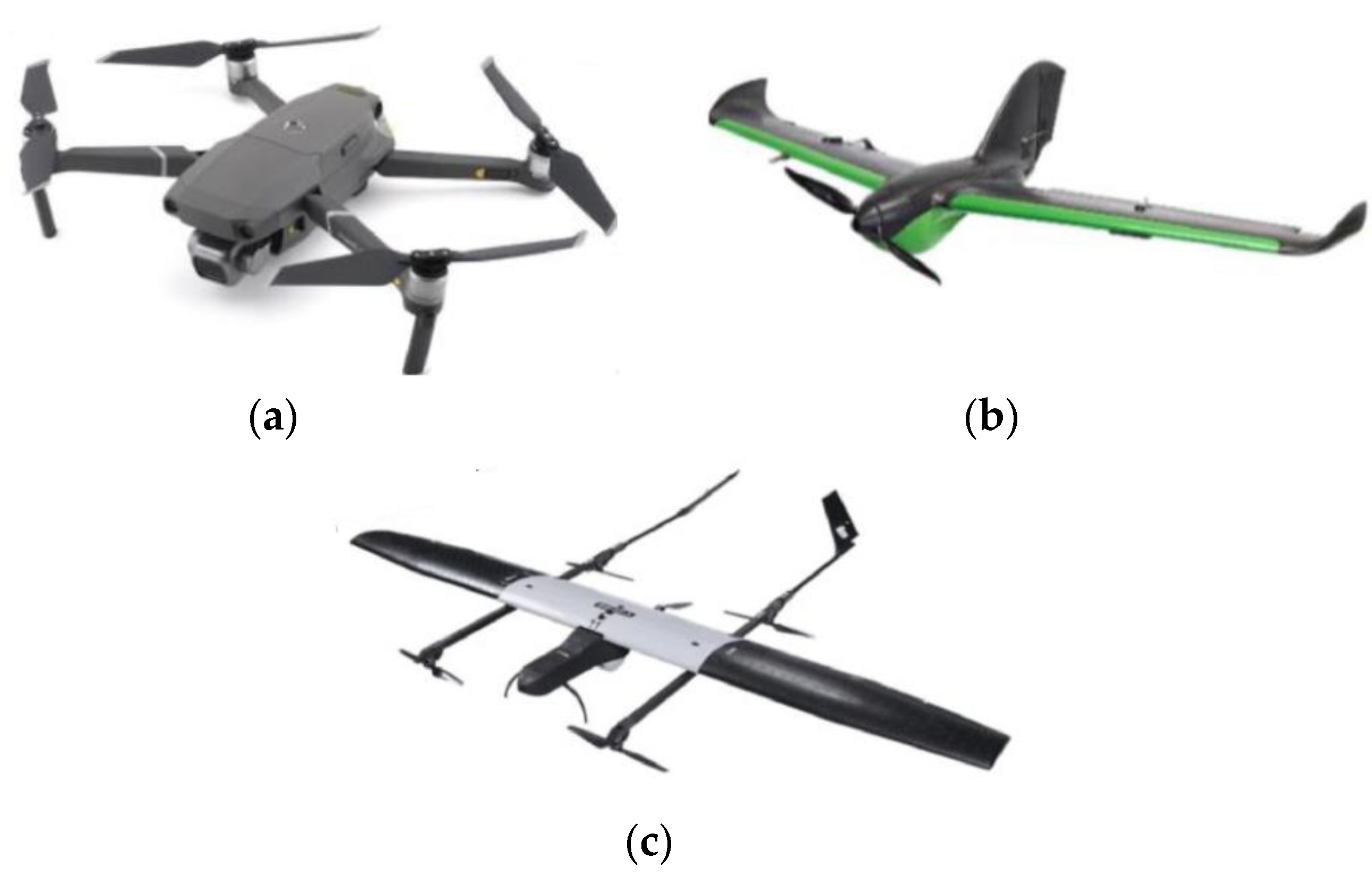
2.1. UAVs Classification
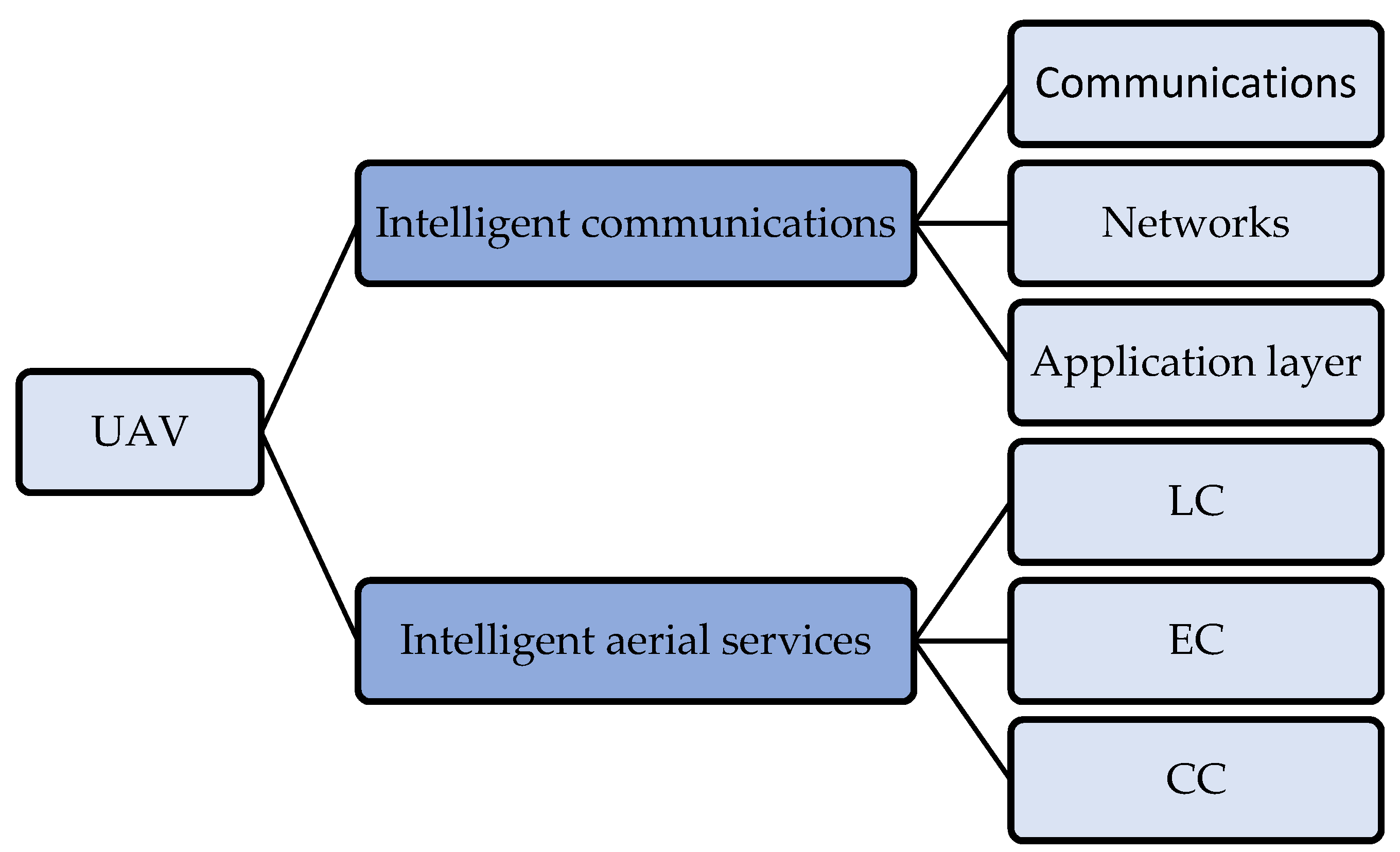
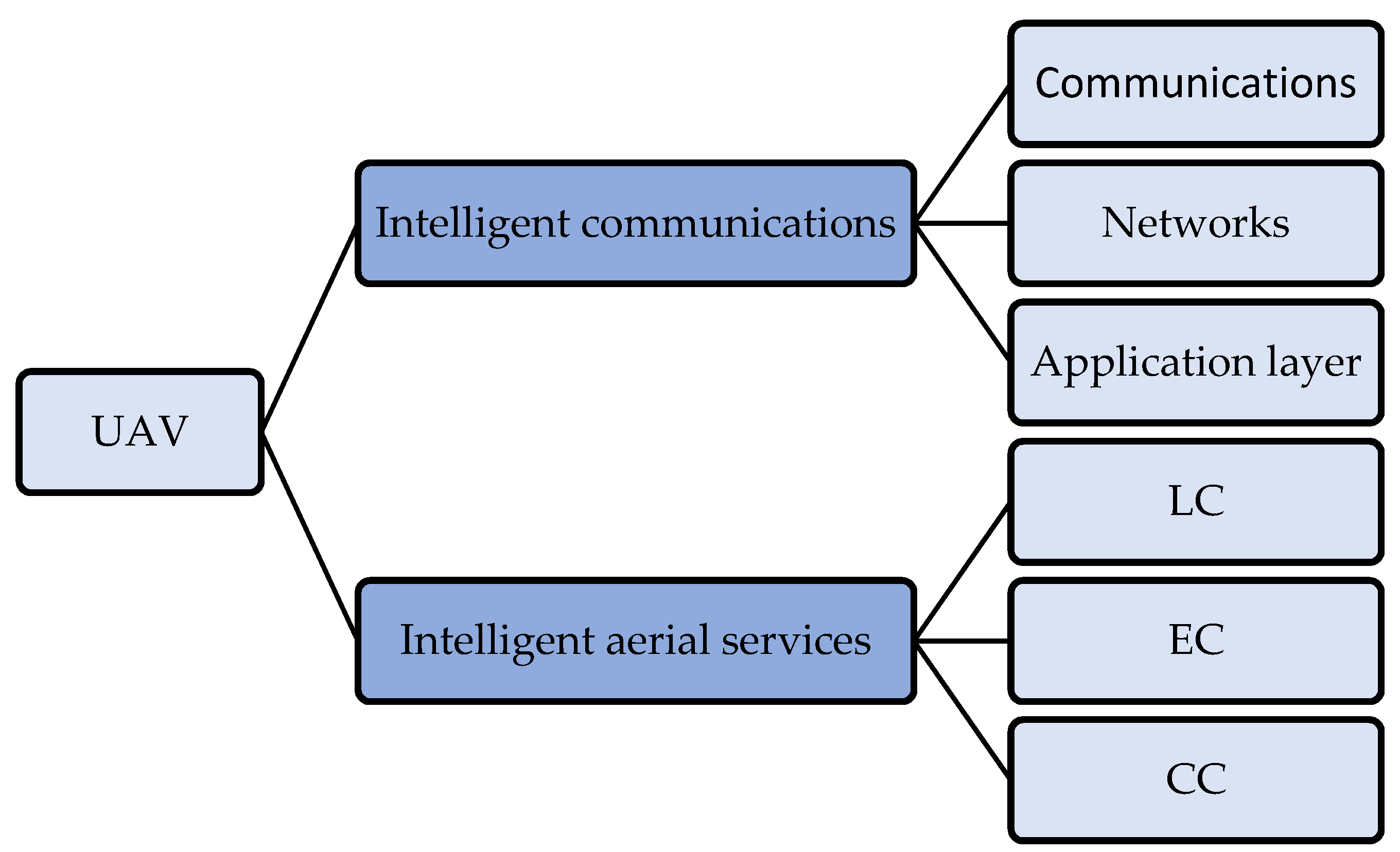
2.2. UAV-Enabled Services
2.3. UAV Applications
- Agriculture:
- Industry 4.0:
- Environment:
- Health and emergency:
- Smart cities and smart homes:
- Natural disaster tracking:
- Construction:
- Wireless and cellular networks:
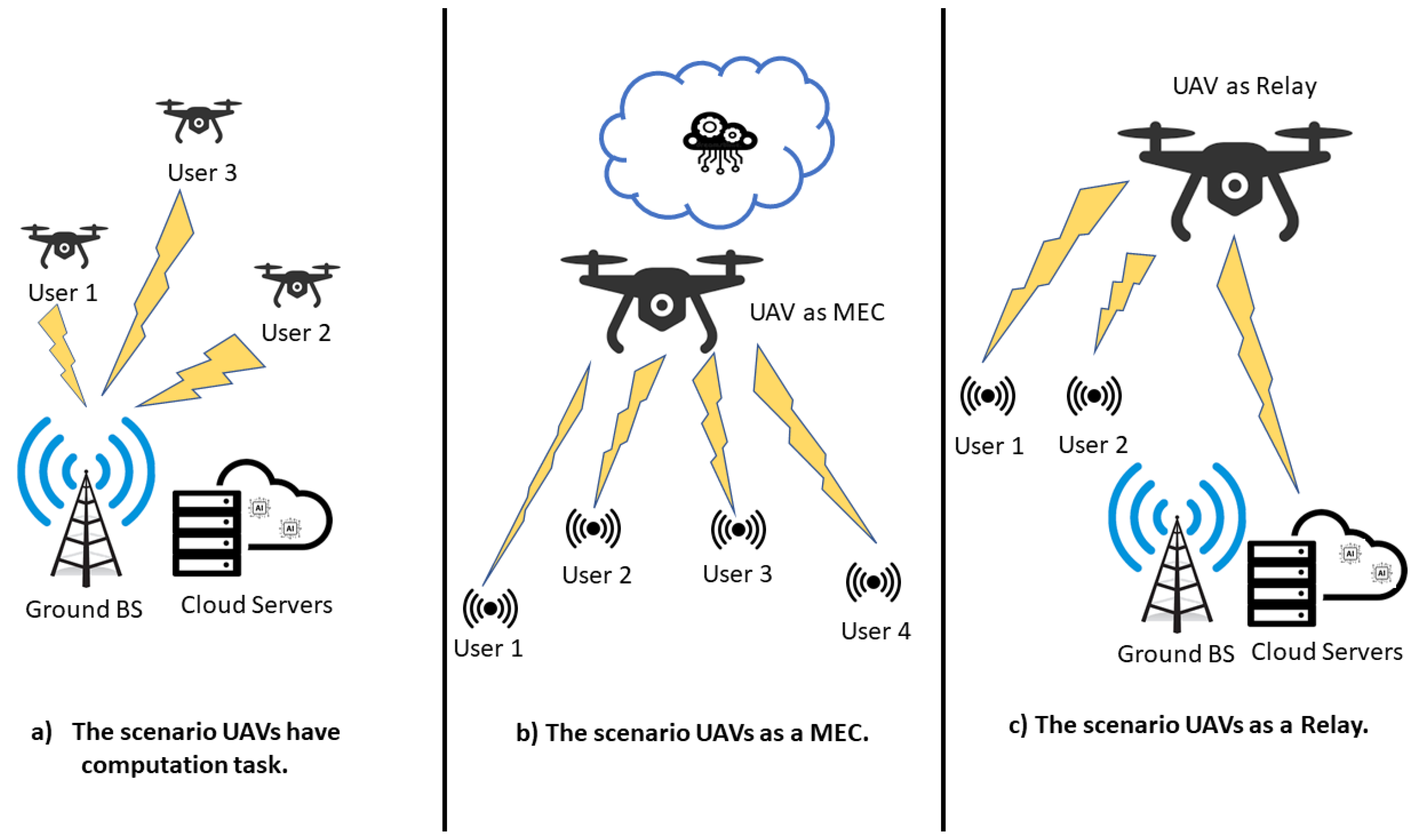
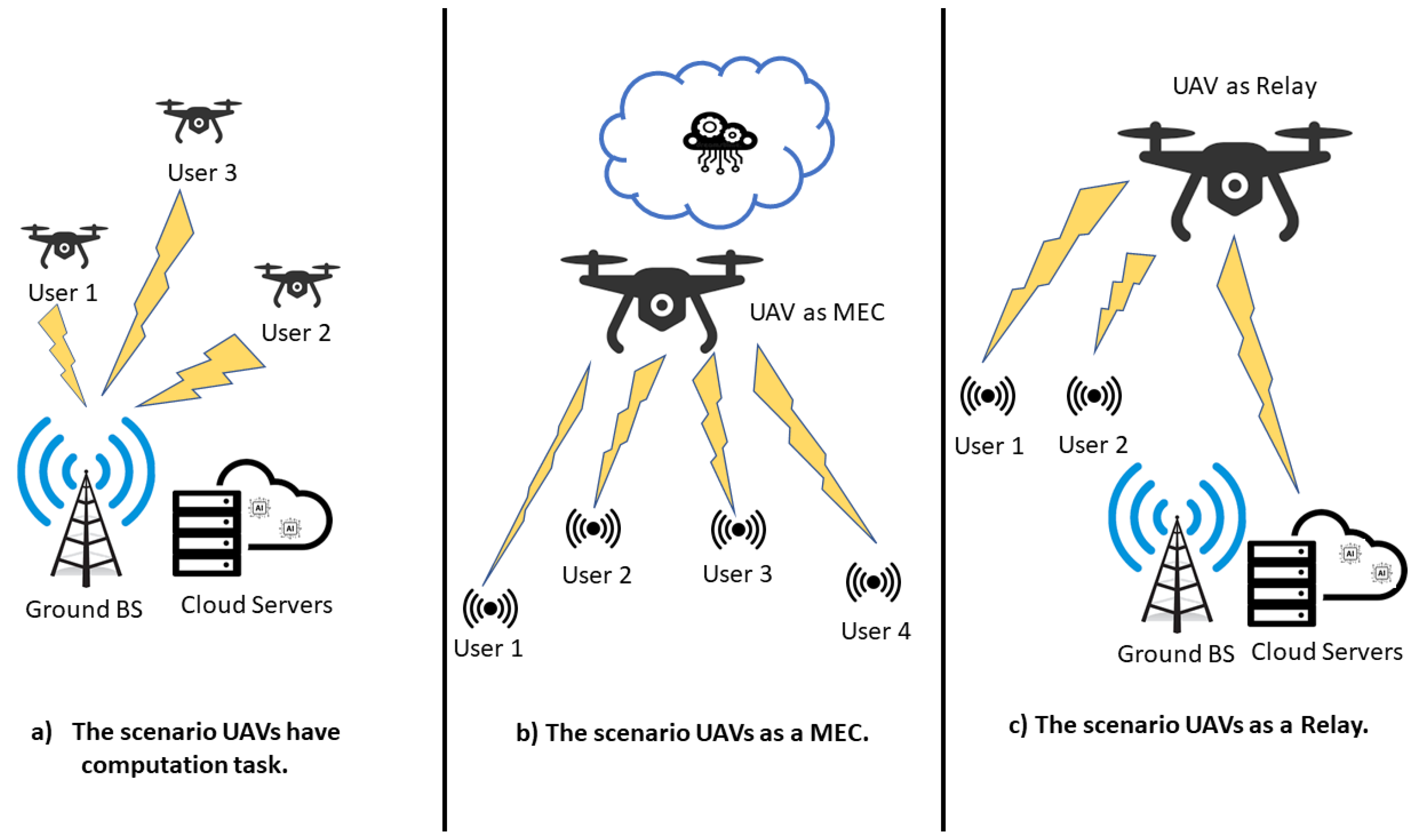
2.4. UAV-Enabled and -Assisted MEC Architecture
3. UAV-Enabled and Assisted MEC State of the Art
4. UAV-Enabled MEC and Assisted MEC Based on AI
5. Discussion and Open Issues
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| Abbreviation | Definition |
| AI | Artificial intelligence |
| CC | Cloud computing |
| CPU | Central processing units |
| CV | Computer vision |
| DRL | Deep reinforcement learning |
| EC | Edge computing |
| FANET | Flying ad hoc network |
| FI | Fuzzy inference |
| GA | Genetic algorithm |
| GPU | Graphics processing units |
| IoFT | Internet of Flying Things |
| IoT | Internet of Things |
| ISM | Industrial scientific medical |
| LC | Local computing |
| LoRa | Long-range |
| TDMA | Time division multiple access |
| MEC | Mobile edge computing |
| ML | Machine learning |
| NOMA | Non-orthogonal multiple access |
| QoS | Quality of service |
| RL | Reinforcement learning |
| UAV | Unmanned aerial vehicle |
| VANET | Vehicular ad hoc network |
| BLE | Bluetooth low energy |
| RL-ACO | Reinforcement learning based on ant-colony optimization |
| DRL | Deep reinforcement learning |
| VTOL | Vertical take-off and landing |
| HTOL | Horizontal take-off and landing |
| LiDAR | Light detection and ranging |
References
- Nižetić, S.; Šolić, P.; López-de-Ipiña González-de-Artaza, D.; Patrono, L. Internet of Things (IoT): Opportunities, issues and challenges towards a smart and sustainable future. J. Clean. Prod. 2020, 274, 122877. [Google Scholar] [CrossRef]
- Shafique, K.; Khawaja, B.A.; Sabir, F.; Qazi, S.; Mustaqim, M. Internet of things (IoT) for next-generation smart systems: A review of current challenges, future trends and prospects for emerging 5G-IoT Scenarios. IEEE Access 2020, 8, 23022–23040. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement Optimization of UAV-Mounted Mobile Base Stations. IEEE Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef] [Green Version]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Joint trajectory and power optimization for UAV sensing over cellular networks. IEEE Commun. Lett. 2018, 22, 2382–2385. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Liu, B.; Huang, H.; Guo, S.; Zheng, Z. When UAV Swarm Meets Edge-Cloud Computing: The QoS Perspective. IEEE Netw. 2019, 33, 36–43. [Google Scholar] [CrossRef]
- Mao, Y.; You, C.; Zhang, J.; Huang, K.; Letaief, K.B. A Survey on Mobile Edge Computing: The Communication Perspective. IEEE Commun. Surv. Tutor. 2017, 19, 2322–2358. [Google Scholar] [CrossRef] [Green Version]
- Cheng, N.; Xu, W.; Shi, W.; Zhou, Y.; Lu, N.; Zhou, H.; Shen, X. Air-ground integrated mobile edge networks: Architecture, challenges, and opportunities. IEEE Commun. Mag. 2018, 56, 26–32. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Zhou, A.; Liu, C.; Zhang, T.; Qi, L.; Wang, S.; Buyya, R. Reliability-Enhanced Task Offloading in Mobile Edge Computing Environments. IEEE Internet Things J. 2021, 124–129. [Google Scholar] [CrossRef]
- Kumari, A.; Gupta, R.; Tanwar, S.; Kumar, N. A taxonomy of blockchain-enabled softwarization for secure UAV network. Comput. Commun. 2020, 161, 304–323. [Google Scholar] [CrossRef]
- Mehta, P.; Gupta, R.; Tanwar, S. Blockchain envisioned UAV networks: Challenges, solutions, and comparisons. Comput. Commun. 2020, 151, 518–538. [Google Scholar] [CrossRef]
- Abrar, M.; Ajmal, U.; Almohaimeed, Z.M.; Gui, X.; Akram, R.; Masroor, R. Energy Efficient UAV-Enabled Mobile Edge Computing for IoT Devices: A Review. IEEE Access 2021, 9, 127779–127798. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.W.; Jayakody, D.N.K.; Wang, H.C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Zhang, W.; Li, L.; Zhang, N.; Han, T.; Wang, S. Air-Ground Integrated Mobile Edge Networks: A Survey. IEEE Access 2020, 8, 125998–126018. [Google Scholar] [CrossRef]
- Shakarami, A.; Ghobaei-Arani, M.; Shahidinejad, A. A survey on the computation offloading approaches in mobile edge computing: A machine learning-based perspective. Comput. Netw. 2020, 182, 107496. [Google Scholar] [CrossRef]
- Korchenko, A.G.; Illyash, O.S. The generalized classification of Unmanned Air Vehicles. In Proceedings of the 2013 IEEE 2nd International Conference Actual Problems of Unmanned Air Vehicles Developments Proceedings (APUAVD), Kiev, Ukraine, 15–17 October 2013; pp. 28–34. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef]
- Guo, Y.; Yin, G.; Sun, H.; Wang, H.; Chen, S.; Senthilnath, J.; Wang, J.; Fu, Y. Scaling effects on chlorophyll content estimations with RGB camera mounted on a UAV platform using machine-learning methods. Sensors 2020, 20, 5130. [Google Scholar] [CrossRef]
- Lin, Y.C.; Cheng, Y.T.; Zhou, T.; Ravi, R.; Hasheminasab, S.M.; Flatt, J.E.; Troy, C.; Habib, A. Evaluation of UAV LiDAR for mapping coastal environments. Remote Sens. 2019, 11, 2893. [Google Scholar] [CrossRef] [Green Version]
- Miyoshi, G.T.; Arruda, S.; Osco, L.P.; Junior, M.; Gonçalves, D.N.; Imai, N.N. A Novel Deep Learning Method to Identify Single Tree Species in UAV-Based Hyperspectral Images. Remote Sens. 2020, 12, 1294. [Google Scholar] [CrossRef] [Green Version]
- Cen, H.; Wan, L.; Zhu, J.; Li, Y.; Li, X.; Zhu, Y.; Weng, H. Dynamic monitoring of biomass of rice under different nitrogen treatments using a lightweight UAV with dual image—Frame snapshot cameras. Plant Methods 2019, 15, 32. [Google Scholar] [CrossRef] [PubMed]
- Hill, A.C.; Laugier, E.J. Archaeological Remote Sensing Using Infrared (NIR) Imagery: A Case Study at the Enfield Shaker Village, New Hampshire. Remote Sens. 2020, 12, 690. [Google Scholar] [CrossRef] [Green Version]
- Zaidi, S.; Atiquzzaman, M.; Calafate, C.T. Internet of Flying Things (IoFT): A Survey. Comput. Commun. 2021, 165, 53–74. [Google Scholar] [CrossRef]
- Nazib, R.A.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle-Aided Vehicular Ad Hoc Networks: A Survey. IEEE Access 2020, 8, 77535–77560. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Yazid, Y.; Ez-Zazi, I.; Arioua, M.; Oualkadi, A.E.L. On the LoRa performances under different physical layer parameter selection. In Proceedings of the 2020 International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Kenitra, Morocco, 25–27 November 2020; pp. 13–18. [Google Scholar] [CrossRef]
- Akpakwu, G.A.; Silva, B.J.; Hancke, G.P.; Abu-Mahfouz, A.M. A Survey on 5G Networks for the Internet of Things: Communication Technologies and Challenges. IEEE Access 2017, 6, 3619–3647. [Google Scholar] [CrossRef]
- Mignardi, S.; Marini, R.; Verdone, R.; Buratti, C. On the performance of a uav-aided wireless network based on nb-iot. Drones 2021, 5, 94. [Google Scholar] [CrossRef]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Sohail, M.F.; Member, S. Non-Orthogonal Multiple Access for Unmanned Aerial Vehicle Assisted Communication. IEEE Access 2018, 6, 22716–22727. [Google Scholar] [CrossRef]
- Liu, D.; Xu, Y.; Wang, J.; Chen, J.; Yao, K.; Wu, Q.; Anpalagan, A. Opportunistic UAV utilization in wireless networks: Motivations, applications, and challenges. IEEE Commun. Mag. 2020, 58, 62–68. [Google Scholar] [CrossRef]
- Liu, Q.; Shi, L.; Sun, L.; Li, J.; Ding, M.; Shu, F.S. Path Planning for UAV-Mounted Mobile Edge Computing with Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 5723–5728. [Google Scholar] [CrossRef] [Green Version]
- Ali, N.; Jhanjhi, N.Z.; Nawaz, S.; Sher, R.; Usmani, A. Smart traffic monitoring system using Unmanned Aerial Vehicles (UAVs). Comput. Commun. 2020, 157, 434–443. [Google Scholar] [CrossRef]
- Jiang, F.; Wang, K.; Dong, L.; Pan, C.; Xu, W.; Yang, K. Deep Learning Based Joint Resource Scheduling Algorithms for Hybrid MEC Networks. IEEE Internet Things J. 2020, 7, 6252–6265. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Wu, Y.; Sun, H.; Chu, Z. UAV-Enabled mobile edge computing: Offloading optimization and trajectory design. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Kitpo, N.; Inoue, M. Early rice disease detection and position mapping system using drone and IoT architecture. In Proceedings of the 2018 12th South East Asian Technical University Consortium (SEATUC), Yogyakarta, Indonesia, 12–13 March 2018. [Google Scholar] [CrossRef]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef] [Green Version]
- Mazzia, V.; Comba, L.; Khaliq, A.; Chiaberge, M.; Gay, P. UAV and Machine Learning Based Refinement of a Satellite-Driven Vegetation Index for Precision Agriculture. Sensors 2020, 20, 2530. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned Aerial Vehicles in Smart Agriculture: Applications, Requirements, and Challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Grosso, R.; Mecca, U.; Moglia, G.; Prizzon, F.; Rebaudengo, M. Collecting built environment information using UAVs: Time and applicability in building inspection activities. Sustainability 2020, 12, 4731. [Google Scholar] [CrossRef]
- Panday, U.S.; Shrestha, N.; Maharjan, S.; Pratihast, A.K.; Shahnawaz; Shrestha, K.L.; Aryal, J. Correlating the plant height of wheat with aboveground biomass and crop yield using drone imagery and crop surface model, a case study from Nepal. Drones 2020, 4, 28. [Google Scholar] [CrossRef]
- Hentschke, M.; de Freitas, E.P.; Hennig, C.H.; da Veiga, I.C.G. Evaluation of altitude sensors for a crop spraying drone. Drones 2018, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Suen, H.K.; Ary, D. Reliability: Conventional Methods. Anal. Quant. Behav. Obs. Data 2020, 111–142. [Google Scholar] [CrossRef]
- Agapiou, A. Vegetation extraction using visible-bands from openly licensed unmanned aerial vehicle imagery. Drones 2020, 4, 27. [Google Scholar] [CrossRef]
- Sharma, V.; Choudhary, G.; Ko, Y. Behavior and Vulnerability Assessment of Drones-Enabled Industrial Internet of Things (IIoT). IEEE Access 2018, 6, 43368–43383. [Google Scholar] [CrossRef]
- Salhaoui, M.; Guerrero-González, A.; Arioua, M.; Ortiz, F.J.; El Oualkadi, A.; Torregrosa, C.L. Smart industrial iot monitoring and control system based on UAV and cloud computing applied to a concrete plant. Sensors 2019, 19, 3316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; V Maldague, X.P.; González Jorge, H.; Miguel González de Santos, L. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones 2021, 5, 106. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Cowley, D.C.; Moriarty, C.; Geddes, G.; Brown, G.L.; Wade, T.; Nichol, C.J. UAVs in context: Archaeological airborne recording in a national body of survey and record. Drones 2018, 2, 2. [Google Scholar] [CrossRef] [Green Version]
- Mangewa, L.J.; Ndakidemi, P.A.; Munishi, L.K. Integrating UAV technology in an ecological monitoring system for community wildlife management areas in Tanzania. Sustainability 2019, 11, 6116. [Google Scholar] [CrossRef] [Green Version]
- Rees, A.F.; Avens, L.; Ballorain, K.; Bevan, E.; Broderick, A.C.; Carthy, R.R.; Christianen, M.J.A.; Duclos, G.; Heithaus, M.R.; Johnston, D.W.; et al. The potential of unmanned aerial systems for sea turtle research and conservation: A review and future directions. Endanger. Species Res. 2018, 35, 81–100. [Google Scholar] [CrossRef] [Green Version]
- Salhaoui, M.; Molina-molina, J.C.; Guerrero-gonz, A.; Arioua, M.; Ortiz, F.J. Autonomous Underwater Monitoring System for Detecting Life on the Seabed by Means of Computer Vision Cloud Services. Remote Sens. 2020, 12, 198. [Google Scholar] [CrossRef]
- Wang, D.; Shao, Q.; Yue, H. Surveying wild animals from satellites, manned aircraft and unmanned aerial systems (UASs): A review. Remote Sens. 2019, 11, 1308. [Google Scholar] [CrossRef] [Green Version]
- Chamola, V.; Hassija, V.; Gupta, V.; Guizani, M. A Comprehensive Review of the COVID-19 Pandemic and the Role of IoT, Drones, AI, Blockchain, and 5G in Managing its Impact. IEEE Access 2020, 8, 90225–90265. [Google Scholar] [CrossRef]
- Jeyabalan, V.; Nouvet, E.; Meier, P.; Donelle, L. Context-specific challenges, opportunities, and ethics of drones for healthcare delivery in the eyes of program managers and field staff: A multi-site qualitative study. Drones 2020, 4, 44. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, K.; Jia, S.; Li, Q.; Hou, X.; Lin, W.; Liu, B.; Qiu, G. Urban Traffic Density Estimation Based on Neural Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4968–4981. [Google Scholar] [CrossRef]
- Congress, S.S.C.; Puppala, A.J.; Lundberg, C.L. Total system error analysis of UAV-CRP technology for monitoring transportation infrastructure assets. Eng. Geol. 2018, 247, 104–116. [Google Scholar] [CrossRef]
- Outay, F.; Abdullah, H.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. Part A 2020, 141, 116–129. [Google Scholar] [CrossRef]
- Malihi, S.; Javad, M.; Zoej, V.; Hahn, M. Large-Scale Accurate Reconstruction of Buildings Employing Point Clouds Generated from UAV Imagery. Remote Sens. 2018, 10, 1148. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, N.; Al-jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Technological Forecasting & Social Change Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Qi, F.; Zhu, X.; Mang, G.; Kadoch, M.; Li, W. Internet of things for smart citites: Technologies and applications UAV Network and IoT in the Sky for Future Smart Cities. IEEE Netw. 2019, 33, 96–101. [Google Scholar] [CrossRef]
- Orgeira-crespo, P.; Ulloa, C.; Rey-gonzalez, G.; Antonio, P. Methodology for Indoor Positioning and Landing of an Unmanned Aerial Vehicle in a Smart Manufacturing Plant for Light Part Delivery. Electronics 2020, 9, 1680. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the Sky: Leveraging UAVs for Disaster Management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Liu, D.; Xia, X.; Chen, J.; Li, S. Integrating Building Information Model and Augmented Reality for Drone-Based Building Inspection. J. Comput. Civ. Eng. 2021, 35, 04020073. [Google Scholar] [CrossRef]
- Chen, S.; Laefer, D.F.; Mangina, E.; Zolanvari, S.M.I.; Byrne, J. UAV Bridge Inspection through Evaluated 3D Reconstructions. J. Bridg. Eng. 2019, 24, 05019001. [Google Scholar] [CrossRef] [Green Version]
- Hildmann, H.; Kovacs, E. Review: Using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for Disaster Response, Civil Security and Public Safety. Drones 2019, 3, 59. [Google Scholar] [CrossRef] [Green Version]
- Bang, S.; Kim, H.; Kim, H. Automation in Construction UAV-based automatic generation of high-resolution panorama at a construction site with a focus on preprocessing for image stitching. Autom. Constr. 2017, 84, 70–80. [Google Scholar] [CrossRef]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.L.; Bergstrom, M.; Euler, S.; Wang, Y.P.E. The Sky is Not the Limit: LTE for Unmanned Aerial Vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef] [Green Version]
- Villa, D.K.D.; Brandão, A.S.; Sarcinelli-Filho, M. A Survey on Load Transportation Using Multirotor UAVs. J. Intell. Robot. Syst. Theory Appl. 2020, 98, 267–296. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Ren, J.; Guo, H.; Xu, C.; Zhang, Y. Serving at the Edge: A Scalable IoT Architecture Based on Transparent Computing. IEEE Netw. 2017, 31, 96–105. [Google Scholar] [CrossRef]
- Mach, P.; Becvar, Z. Mobile Edge Computing: A Survey on Architecture and Computation Offloading. IEEE Commun. Surv. Tutor. 2017, 19, 1628–1656. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.; Ding, Y.; Gao, Y.; Hu, S.; Wu, Y.; Zhao, N.; Gong, Y. Resource and Trajectory Optimization for Secure Communications in Dual-UAV-MEC Systems. IEEE Trans. Ind. Inform. 2021, 3203, 1–10. [Google Scholar] [CrossRef]
- Chen, J.; Chen, S.; Luo, S.; Wang, Q.; Cao, B.; Li, X. An intelligent task of fl oading algorithm (iTOA) for UAV edge computing network. Digit. Commun. Netw. 2020, 6, 433–443. [Google Scholar] [CrossRef]
- Zhu, S.; Lin, G.; Zhao, D.; Cheng, N.; Zhang, Q.; Lang, X. Learning-Based Computation Offloading Approaches in UAVs-Assisted Edge Computing. IEEE Trans. Veh. Technol. 2021, 70, 928–944. [Google Scholar] [CrossRef]
- Liyanage, M.; Dar, F.; Sharma, R.; Flores, H. GEESE: Edge computing enabled by UAVs. Pervasive Mob. Comput. 2021, 72, 101340. [Google Scholar] [CrossRef]
- Xu, J.; Liu, X.; Li, X.; Zhang, L.; Jin, J.; Yang, Y. Energy aware Computation Management Strategy for Smart Logistic System with MEC. IEEE Internet Things J. 2021, 4662, 1–17. [Google Scholar] [CrossRef]
- Li, W.T.; Zhao, M.; Wu, Y.H.; Yu, J.J.; Bao, L.Y.; Yang, H.; Liu, D. Collaborative offloading for UAV—enabled time—sensitive MEC networks. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 1. [Google Scholar] [CrossRef]
- Liu, Y.; Xiong, K.; Ni, Q.; Member, S.; Fan, P.; Member, S.; Letaief, K.B. UAV-assisted Wireless Powered Cooperative Mobile Edge Computing: Joint Offloading, CPU Control and Trajectory Optimization. IEEE Internet Things J. 2019, 7, 2777–2790. [Google Scholar] [CrossRef]
- Zhang, T.; Xu, Y.; Loo, J.; Yang, D.; Xiao, L. Joint Computation and Communication Design for UAV-Assisted Mobile Edge Computing in IoT. IEEE Trans. Ind. Inform. 2019, 16, 5505–5516. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Wong, K.K.; Yang, K.; Zheng, Z. UAV-Assisted Relaying and Edge Computing: Scheduling and Trajectory Optimization. IEEE Trans. Wirel. Commun. 2019, 18, 4738–4752. [Google Scholar] [CrossRef]
- Du, Y.; Yang, K.; Wang, K.; Zhang, G.; Zhao, Y.; Chen, D. Joint Resources and Workflow Scheduling in UAV-Enabled Wirelessly-Powered MEC for IoT Systems. IEEE Trans. Veh. Technol. 2019, 68, 10187–10200. [Google Scholar] [CrossRef]
- Wang, Y.; Ru, Z.Y.; Wang, K.; Huang, P.Q. Joint Deployment and Task Scheduling Optimization for Large-Scale Mobile Users in Multi-UAV-Enabled Mobile Edge Computing. IEEE Trans. Cybern. 2020, 50, 3984–3997. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, Y.; Ding, W.; Zhang, B. Optimization of Task Scheduling and Dynamic Service Strategy for Multi-UAV-enabled Mobile Edge Computing System. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 970–984. [Google Scholar] [CrossRef]
- Ouyang, W.; Chen, Z.; Wu, J.; Yu, G.; Zhang, H. Dynamic Task Migration Combining Energy Efficiency and Load Balancing Optimization in Three-Tier UAV-Enabled Mobile Edge Computing System. Electronics 2021, 10, 190. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J. UAV-Enhanced Intelligent Offloading for Internet of Things at the Edge. IEEE Trans. Ind. Inform. 2020, 16, 2737–2746. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, G.; Ma, S.; Yang, K.; Wang, K. Efficient Multitask Scheduling for Completion Time Minimization in UAV-Assisted Mobile Edge Computing. Mob. Inf. Syst. 2020, 2020, 8791030. [Google Scholar] [CrossRef]
- Zhou, Y.; Pan, C.; Yeoh, P.L.; Wang, K.; Elkashlan, M.; Vucetic, B.; Li, Y. Secure Communications for UAV-Enabled Mobile Edge Computing Systems. IEEE Trans. Commun. 2020, 68, 376–388. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Feng, J.; Tan, L.; He, Y.; Gong, J. An air-ground integration approach for mobile edge computing in IoT. IEEE Commun. Mag. 2018, 56, 40–47. [Google Scholar] [CrossRef]
- Narang, M.; Xiang, S.; Liu, W.; Gutierrez, J.; Chiaraviglio, L. UAV-assisted Edge Infrastructure for Challenged Networks. In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017. [Google Scholar] [CrossRef]
- Hu, Q.; Cai, Y.; Yu, G.; Qin, Z.; Zhao, M.; Li, G.Y. Joint offloading and trajectory design for UAV-enabled mobile edge computing systems. IEEE Internet Things J. 2019, 6, 1879–1892. [Google Scholar] [CrossRef]
- Chang, H.; Chen, Y.; Zhang, B.; Doermann, D. Multi-UAV Mobile Edge Computing and Path Planning Platform Based on Reinforcement Learning. IEEE Trans. Emerg. Top. Comput. Intell. 2021, 1–10. [Google Scholar] [CrossRef]
- Diao, X.; Zheng, J.; Wu, Y.; Cai, Y.; Anpalagan, A. Joint Trajectory Design, Task Data, and Computing Resource Allocations for NOMA-Based and UAV-Assisted Mobile Edge Computing. IEEE Access 2019, 7, 117448–117459. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation rate maximization in UAV-Enabled wireless-powered mobile-edge computing systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef] [Green Version]
- Balamuralidhar, N.; Tilon, S.; Nex, F. MultEYE: Monitoring System for Real-Time Vehicle Detection, Tracking and Speed Estimation from UAV Imagery on Edge-Computing Platforms. Remote Sens. 2021, 13, 573. [Google Scholar] [CrossRef]
- Yang, M.; Boubin, J.G.; Ping, H.; Tseng, H.; Hsu, Y.; Stewart, C.C. Adaptive autonomous UAV scouting for rice lodging assessment using edge computing with deep learning EDANet. Comput. Electron. Agric. 2020, 179, 105817. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, M.; Liu, X.; Liu, Y.; Chen, Y.; Cui, S.; Poor, H.V. Aerial Computing: Drones for Multi-Access Edge Computing AI-Driven UAV-NOMA-MEC in Next Generation Wireless Networks. IEEE Wirel. Commun. 2021, 28. [Google Scholar] [CrossRef]
- Grasso, C.; Schembra, G. A Fleet of MEC UAVs to Extend a 5G Network Slice for Video Monitoring with Low-Latency Constraints. J. Sens. Actuator Netw. 2019, 8, 3. [Google Scholar] [CrossRef] [Green Version]
- Nie, Y.; Member, S.; Zhao, J.; Member, S.; Gao, F.; Yu, F.R. Semi-Distributed Resource Management in UAV-Aided MEC Systems: A Multi-Agent Federated Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2021, 1–12. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Boudguiga, A.; Ben, I.; Mohammed, S. Ad Hoc Networks An efficient cyber defense framework for UAV-Edge computing network. Ad Hoc Netw. 2019, 94, 101970. [Google Scholar] [CrossRef]
- Tian, Y.; Yuan, J.; Song, H. Journal of Information Security and Applications Efficient privacy-preserving authentication framework for e dge-assiste d Internet of Drones. J. Inf. Secur. Appl. 2019, 48, 102354. [Google Scholar] [CrossRef]
- Wang, G.; Yu, X.; Xu, F.; Cai, J. Task offloading and resource allocation for UAV-assisted mobile edge computing with imperfect channel estimation over Rician fading channels. EURASIP J. Wirel. Commun. Netw. 2020, 8, 1–19. [Google Scholar] [CrossRef]
- Messous, M.; Arfaoui, A.; Alioua, A.; Senouci, S.; Ea, D.; Comté, F. A Sequential Game Approach for Computation-Offloading in an UAV Network. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Li, J.; Liu, Q.; Wu, P.; Shu, F.; Jin, S. Task Offloading for UAV-based Mobile Edge Computing via Deep Reinforcement Learning. In Proceedings of the 2018 IEEE/CIC International Conference on Communications, Beijing, China, 16–18 August 2018; pp. 798–802. [Google Scholar] [CrossRef]
- Ren, Y.; Xie, Z.; Ding, Z.; Sun, X.; Xia, J.; Tian, Y. Computation offloading game in multiple unmanned aerial vehicle-enabled mobile edge computing networks. IET Commun. 2021, 15, 1392–1401. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, Z.; Wu, Q.; Zhao, H.; Xu, H.; Wu, X. Energy-Aware Dynamic Resource Allocation in UAV Assisted Mobile Edge Computing Over Social Internet of Vehicles. IEEE Access 2018, 6, 56700–56715. [Google Scholar] [CrossRef]
- Wang, X.; Han, Y.; Leung, V.C.M.; Niyato, D.; Yan, X.; Chen, X. Convergence of Edge Computing and Deep Learning: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 869–904. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Ke, H.; Sun, W. Unmanned-aerial-vehicle-assisted computation offloading for mobile edge computing based on deep reinforcement learning. IEEE Access 2020, 8, 180784–180798. [Google Scholar] [CrossRef]
- Ullah, Z.; Al-Turjman, F.; Moatasim, U.; Mostarda, L.; Gagliardi, R. UAVs joint optimization problems and machine learning to improve the 5G and Beyond communication. Comput. Netw. 2020, 182, 107478. [Google Scholar] [CrossRef]
- Pourghasemian, M.; Abedi, M.R.; Salarhosseini, S.; Mokari, N.; Javan, M.R.; Jorswieck, E.A. AI-Based and Mobility-Aware Energy Efficient Resource Allocation and Trajectory Design for NFV Enabled Aerial Networks. arXiv 2021, arXiv:2105.10282. Available online: https://arxiv.org/abs/2105.10282v1 (accessed on 12 November 2021).
- Xu, J.; Chen, L.; Ren, S. Online Learning for Offloading and Autoscaling in Energy Harvesting Mobile Edge Computing. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 361–373. [Google Scholar] [CrossRef]
- Wang, J.; Hu, J.; Min, G.; Zhan, W.; Ni, Q.; Georgalas, N. Computation Offloading in Multi-Access Edge Computing Using a Deep Sequential Model Based on Reinforcement Learning. IEEE Commun. Mag. 2019, 57, 64–69. [Google Scholar] [CrossRef] [Green Version]
- Bozorgchenani, A.; Member, S.; Mashhadi, F.; Member, S. Multi-Objective Computation Sharing in Energy and Delay Constrained Mobile Edge Computing Environments. IEEE Trans. Mob. Comput. 2020, 20, 2992–3005. [Google Scholar] [CrossRef]
- Tang, L.; Tang, B.; Kang, L.; Zhang, L. A Novel Task Caching and Migration Strategy in Multi-Access Edge Computing Based on the Genetic Algorithm. Futur. Internet 2019, 11, 181. [Google Scholar] [CrossRef] [Green Version]
- Dinh, T.Q.; Member, S.; La, Q.D.; Quek, T.Q.S. Distributed Learning for Computation Offloading in Mobile Edge Computing. IEEE Trans. Commun. 2018, 66, 6353–6367. [Google Scholar] [CrossRef]
- Miao, Y.; Wu, G.; Li, M.; Ghoneim, A.; Al-rakhami, M. Intelligent task prediction and computation offloading based on mobile-edge cloud computing. Futur. Gener. Comput. Syst. 2020, 102, 925–931. [Google Scholar] [CrossRef]
- Li, G.; Zhou, H.; Feng, B.; Li, G.; Li, T.; Xu, Q.; Quan, W. Fuzzy Theory Based Security Service Chaining for Sustainable Mobile-Edge Computing. Mob. Inf. Syst. 2017, 2017, 8098394. [Google Scholar] [CrossRef] [Green Version]
- Vimal, S.; Khari, M.; Dey, N.; González, R.; Robinson, Y.H. Enhanced resource allocation in mobile edge computing using reinforcement learning based MOACO algorithm for IIOT. Comput. Commun. 2020, 151, 355–364. [Google Scholar] [CrossRef]
- Li, J.; Gao, H.; Lv, T.; Lu, Y. Deep reinforcement learning based computation offloading and resource allocation for MEC. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, J.; Member, S.; Zhao, L.; Member, S.; Liu, J.; Member, S. Smart Resource Allocation for Mobile Edge Computing: A Deep Reinforcement Learning Approach. IEEE Trans. Emerg. Top. Comput. 2019, 9, 1529–1541. [Google Scholar] [CrossRef]
- Zhang, Q.; Lin, M.; Yang, L.T.; Chen, Z.; Li, P. Energy-Efficient Scheduling for Real-Time Systems Based on Deep Q-Learning Model. IEEE Trans. Sustain. Comput. 2017, 4, 132–141. [Google Scholar] [CrossRef]
- Luo, Z.; Liwang, M.; Lin, Z.; Huang, L.; Du, X. Energy-Efficient Caching for Mobile Edge Computing in 5G Networks. Appl. Sci. 2017, 7, 557. [Google Scholar] [CrossRef] [Green Version]
- Xiao, L.; Wan, X.; Dai, C.; Du, X.; Chen, X.; Guizani, M. Security in Mobile Edge Caching with Reinforcement Learning. IEEE Wirel. Commun. 2018, 25, 116–122. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Feng, X.; Zhang, C.; Qian, L.; Wu, Y. Deep reinforcement learning-based joint task of fl oading and bandwidth allocation for multi-user mobile edge computing. Digit. Commun. Netw. 2019, 5, 10–17. [Google Scholar] [CrossRef]
- Li, Z. Genetic Algorithm-Based Optimization of Offloading and Resource Allocation in Mobile-Edge Computing. Information 2020, 11, 83. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Feng, X.; Feng, A.; Huang, Y.; Qian, L.P. Distributed Deep Learning-based Offloading for Mobile Edge Computing Distributed Deep Learning-based Offloading for Mobile Edge. Mob. Netw. Appl. 2018, 1–8. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, H.; Ji, H.; Li, X.; Leung, V.C.M. An efficient computation offloading management scheme in the densely deployed small cell networks with mobile edge computing. IEEE/ACM Trans. Netw. 2018, 26, 2651–2664. [Google Scholar] [CrossRef]
- Wang, L.; Wang, K.; Pan, C.; Xu, W.; Aslam, N.; Hanzo, L. Multi-Agent Deep Reinforcement Learning-Based Trajectory Planning for Multi-UAV Assisted Mobile Edge Computing. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 73–84. [Google Scholar] [CrossRef]
- Liu, Y.; Member, S.; Chen, Y.; Member, S. Artificial Intelligence Driven UAV-NOMA-MEC in Next Generation Wireless Networks. arXiv 2021, arXiv:2101.11681. Available online: https://arxiv.org/abs/2101.11681v1 (accessed on 12 November 2021).
- Yu, S.; Wang, X.; Langar, R. Computation offloading for mobile edge computing: A deep learning approach. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Bologna, Italy, 9–12 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, L.; Zhao, R.; He, K.; Zhao, Z.; Fan, L. Intelligent ubiquitous computing for future UAV-enabled MEC network systems. Cluster Comput. 2021. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, S.; Zhang, Y. Cooperative Offloading and Resource Management for UAV-Enabled Mobile Edge Computing in Power IoT System. IEEE Trans. Veh. Technol. 2020, 69, 12229–12239. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory design and power control for multi-UAV assisted wireless networks: A machine learning approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Yin, C.; Liu, X. Machine Learning Based Joint Offloading and Trajectory Design in UAV Based MEC System for IoT Devices. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 902–909. [Google Scholar] [CrossRef]
- Grasso, C.; Raftopoulos, R.; Schembra, G. Deep Q-Learning for Job Offloading Orchestration in a Fleet of MEC UAVs in 5G Environments. In Proceedings of the 2021 IEEE 7th International Conference on Network Softwarization (NetSoft), Tokyo, Japan, 28 June–2 July 2021; pp. 186–190. [Google Scholar] [CrossRef]
- Zhang, C.; Zheng, Z. Task migration for mobile edge computing using deep reinforcement learning. Futur. Gener. Comput. Syst. 2019, 96, 111–118. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A review on IoT deep learning UAV systems for autonomous obstacle detection and collision avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef] [Green Version]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT framework views and challenges: Towards protecting drones as “things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef] [Green Version]
- Jensen, I.J.; Selvaraj, D.F.; Ranganathan, P. Blockchain technology for networked swarms of unmanned aerial vehicles (UAVs). In Proceedings of the 2019 IEEE 20th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Washington, DC, USA, 10–12 June 2019. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Chen, J.; Ji, L.; Feng, Z.; Han, Z.; Chen, Z. Response Delay Optimization in Mobile Edge Computing Enabled UAV Swarm. IEEE Trans. Veh. Technol. 2020, 69, 3280–3295. [Google Scholar] [CrossRef]
- Zhou, F.; Hu, R.Q.; Li, Z.; Wang, Y. Mobile edge computing in unmanned aerial vehicle networks. IEEE Wirel. Commun. 2020, 27, 140–146. [Google Scholar] [CrossRef] [Green Version]
- Tang, S.; Zhou, W.; Chen, L.; Lai, L.; Xia, J.; Fan, L. Battery-constrained federated edge learning in UAV-enabled IoT for B5G/6G networks. Phys. Commun. 2021, 47, 101381. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor/Camera | Utility | Ref. |
|---|---|---|
| RGB Camera |
| [20] |
| UAV LiDAR |
| [21] |
| Hyperspectral sensors |
| [22] |
| Lightweight cameras |
| [23] |
| Lightweight thermal infra-red sensors |
| [24] |
| Protocol | Max Data Rate | Max Range | Deployment Cost | Energy | Latency | Spectrum | Max Connectivity | Pros/Cons |
|---|---|---|---|---|---|---|---|---|
| NB-IoT | UL: 158.5 kbps DL: 106 kbps | 15 km | High (>15,000 $/BS) | Low (3 µA rest, Tx: 74–220 mA, Rx: 46 mA) | 1.6 s | Licensed Sub-GHz | Massive (>50,000 sensor devices) |
|
| LoRa | LoRa CSS: 0.3–5 kbps FSK: 50 kbps | 5 km (Urban) 15 km (Rural) | High (100–1000 $/BS) | Very Low (2 µA resting, 12 mA Listening) | >1 s | Sub-GHz ISM band | Massive (40,000 sensor devices) |
|
| SigFox | UL: 100/600 bps DL: 600 bps | 10 km (urban), 50 km (rural) | High (>4000 $/BS) | Very Low 10–100 mW (<0.01 mA resting, Tx: 28 mA, Rx: 10.5 mA) | 10 s | Sub-GHz ISM band | Massive (40,000 sensor devices) |
|
| ZigBee | 250 Kbps | <1 km | Low (1–5 $) | High 30 mA (3.16 μW–1 mW) −25 to 0 dBm | 15 ms | ISM | Moderate (255) |
|
| Bluetooth IEEE 802.15.1 | 3 Mbps | 100 m | Low (5–10 $) | Low (1 W) 1–10 mW 0–10 dBm | 3 ms | ISM (2.4–2.4835 GHz) | Low (Over 1000 in Bluetooth mesh networking) |
|
| BLE | 2 Mbps | 240 m | High (>25 $) | Low (0.01–0.5 W) | 50 ms | ISM (2.4–2.5 GHz) | Low |
|
| 5G/6G | 1 Gbps (5G) >10 Gbps (6G) | 200 m | High (>13,000 $) | Medium | 1 ms (5G) 0.1 ms (6G) | Licensed cellular | Massive 1 million/km2 (5G) 10 million/km2 (6G) |
|
| Wi-Fi IEEE 802.11 | 11/54/300 Mbps 7 Gbps | 250 m 100 m | High (100–1000 $ per BS) | Medium | >20 ms | Unlicensed ISM (2.4–5 GHz) | Moderate (255) |
|
| LTE M (Rel13 and Rel14) | 1 Mbps (LTE M Rel13) 4 Mbps (LTE M Rel14) | 12 km | High (>5000 $) | Medium | >150 ms | Licensed LTE frequency band | Massive (20,000 sensor devices) |
|
| Application Domains | Objectives | Pros/Cons | Future Insights | Ref. |
|---|---|---|---|---|
| Agriculture/Precision agriculture |
|
|
| [72] |
| Industry/Construction |
|
|
| [51] |
| Environment/Natural disasters |
|
|
| [32] |
| Smart cities |
|
|
| [72] |
| Logistics and Transportation |
|
|
| [73] |
| Wireless and cellular systems |
|
|
| [3] |
| Ref. | Year | Evaluated Performance Metrics | Summary |
|---|---|---|---|
| [77] | 2021 |
| A secure communication mechanism was created, dedicated to the dual-UAV-MEC system. The main objective of this task was to maximize the user’s security and computing capacity by optimizing the resources and trajectory of the UAV server. The authors relied on mathematical techniques, including the sequential convex approximation (SCA) and block coordinate descent (BCD) algorithms to enhance UAV-enabled MEC security and computing capacity. |
| [37] | 2020 |
| A hybrid DL and fuzzy c-means clustering-based algorithms were proposed to predict the positions of ground-based users and UAVs in a hybrid MEC (H-MEC) network. As a result, IoT devices can efficiently offload their intensive tasks to the UAV servers. |
| [78] | 2020 |
| The authors proposed an intelligent task-offloading algorithm (iTOA) for UAV-enabled MEC services. The proposed approach intelligently perceives the network’s environment and decides the offloading action using the deep Monte Carlo tree algorithm. This method outperforms game theory and greedy search-based methods in latency performance. |
| [79] | 2021 |
| UAVs were adopted in 5G mobile networks to reduce the end-to-end latency and improve communication reliability. Using UAVs with MEC has provided effective traffic management, resulting in decreased latency and better offloading operations. |
| [80] | 2021 |
| A novel system called GEESE was proposed to provide computation services on the network’s edge by integrating cloudlets on multiple aerial UAVs. The system performance has been investigated to understand the relationship between energy efficiency and computation task offloading. |
| [81] | 2021 |
| The energy management of UAV-enabled MEC was investigated in the context of a realistic autonomous delivery network. A computational management solution was designed explicitly for MEC-based task offloading and scheduling strategies. The integrated solution includes both static task offloading and dynamic resource scheduling. The experimental results have revealed that the system can handle a greater UAV payload while using less energy. |
| [82] | 2021 |
| The authors addressed the issue of the energy consumption of IoT devices in UAV-enabled MEC networks. The energy and offloading requirements have been improved by optimizing the UAV trajectory planning, communications, and computing resource allocation. |
| [83] | 2020 |
| A UAV-assisted MEC system, in which the UAVs acts as edge servers, was designed to provide computing services for IoT devices. The proposed approach is based on a k-means clustering algorithm to minimize the energy consumption of the system by planning the trajectories of UAVs efficiently. |
| [84] | 2020 |
| The Lagrangian duality method and successive convex approximation techniques were proposed to reduce UAV-assisted MEC computational complexity. The proposed approach aimed to minimize total energy consumption, including communication-related energy, computation-related energy, and UAV energy. This was achieved by optimizing bits allocation, time-slot scheduling, power allocation, and UAV trajectory design. |
| [85] | 2019 |
| The authors proposed a UAV-enabled MEC architecture in which the UAVs were considered as MEC servers. The objective of this approach was to minimize the energy consumption of both UAV and ground-based users by scheduling computation resources and optimizing the UAV trajectories. |
| [86] | 2019 |
| The authors have investigated a UAV-enabled MEC system based on the time division multiple access (TDMA) model. A TDMA-based scheme was proposed to minimize the user’s energy consumption by optimizing the UAV coordinates, time-slot allocation, and task partitioning. |
| [87] | 2020 |
| A two-layer optimization method was provided to address deployment and task-planning issues in a UAV-enabled MEC system. This approach proved efficient for power consumption optimization. The proposed method was based on a differential evolution algorithm with a removal agent. |
| [88] | 2021 |
| A multi-UAV architecture was proposed in which the UAVs act as computer servers to process the ground-based user’s data and to minimize energy consumption. In this approach, a two-layer strategy was used to optimize the UAV’s task scheduling based on dynamic scheduling-based bidding, whereas the second layer addressed bits allocation and the UAV’s flight path. |
| [89] | 2021 |
| UAV-enabled MEC architecture based on the Markov decision process (MDP) was proposed to optimize mobile users’ energy demands and task offloading. In this work, the UAVs were considered intelligent mobile users. |
| [90] | 2020 |
| An algorithm based on block coordinate descent and successive convex approximation techniques was proposed to optimize data offloading. By considering a single UAV, the proposed system improved the tasks of offloading and energy consumption. |
| [91] | 2020 |
| A UAV-assisted MEC method was proposed, in which the UAVs acted as intermediate devices between the ground-based users and MEC servers. This method leveraged airborne computing and storage facilities to minimize the execution time of offloaded tasks for IoT users. Therefore, the task scheduling and flight path of the UAVs were jointly optimized. |
| [92] | 2020 |
| The authors proposed a low-complexity iterative algorithm to optimize security and privacy, subject to latency, offloading, and energy constraints. This method was proposed to optimize the UAV location, the user’s transmission power, UAV jamming power, offloading ratio, UAV computing capacity, and offloading user association. |
| [93] | 2018 |
| An air/ground framework for MEC was proposed to combine the capabilities of ground vehicles with UAVs in terms of communication, computing, and storage. |
| [11] | 2020 |
| An automatic offloading approach based on the MEC architecture has been proposed to deal with the limited processing capabilities of MEC servers and ground-based users. The UAVs have been used to cache the generated data from the IoT devices and then send it to the MEC servers, which operate in a private blockchain network. |
| [94] | 2017 |
| A UAV-based MEC infrastructure was proposed to improve the network connectivity in uncovered areas. The system helped terrestrial users to compute their tasks in circumstances such as natural catastrophes or in rural locations without communication coverage. |
| [95] | 2019 |
| UAVs were used as MEC-aided systems in wireless communication systems to ensure high QoS for ground-based users. The UAVs flew around the users to provide computing services in an orthogonal way over time. |
| [96] | 2021 |
| A multi-UAV-enabled MEC platform was investigated to assess RL QoS and path planning. The study studied the autonomy and self-hovering ability of a network of UAVs relying on RL algorithms. |
| [97] | 2019 |
| Mobile peripheral computing was deemed a promising technique to address computationally intensive issues. UAV-assisted MEC based on NOMA (non-orthogonal multiple access) can provide flexible computing services for mobile terminals (MTs) in large-scale access networks, as NOMA methods can be adaptive to massive connectivity. In this work, an optimization approach was presented to minimize the power consumption of MTs by jointly optimizing trajectory, task offloading, computing, and resource allocations. |
| [98] | 2018 |
| The authors proposed a UAV-enabled MEC and wireless-powered architecture to tackle propagation packet loss in the IoT era. |
| [8] | 2019 |
| A joint architecture using the edge and cloud models based on UAV swarms was proposed to assure high service qualities in resource-intensive and real-time applications. |
| [10] | 2018 |
| An AGMEN (aerial–ground integrated mobile edge network) architecture was proposed to address many EC network issues, such as communication, computing, and caching. The objective of this approach was to optimally allocate computing and storage resources. The authors deployed a set of UAVs to ensure spatial and temporal coverage, as well as ensuring data delivery for mobile IoT users. |
| [99] | 2021 |
| A traffic monitoring system based on the multi-EYE method was presented to detect and estimate the velocity of unmanned vehicles using aerial image tracking. The image processing was executed in real-time on an embedded edge-computing platform installed on the UAV. |
| [100] | 2020 |
| The concept of EC with UAV was used to perform mapping and lodging assessment in a rice crop without human interaction to reduce maneuvering cost and improve the quality of productivity. The process relies mainly on UAV as an edge server to execute the DNN algorithm while processing the images. |
| [101] | 2021 |
| In this work, AI methods have been used in a UAV-enabled MEC based on the NOMA system. This approach allows terrestrial mobile users to offload their computing duties intelligently. This is intended to increase connectivity and minimize transmission latency and power consumption. |
| [102] | 2019 |
| The authors intended to extend a 5G network for a video surveillance application using a flying ad hoc network consisting of UAVs and EC services. The authors aimed to increase the performance of the entire MEC aerial platform, reduce latency, and ameliorate the reliability of the system’s source usage. |
| [103] | 2021 |
| Two approaches were proposed to deal with resource allocation and power control in a UAV-enabled MEC system. The first approach was a centralized multi-agent RL (MARL) algorithm, which has been used to optimize the system’s power consumption and resource allocation. The second approach is a federated multi-agent reinforcement learning (MAFRL) algorithm, which has been proposed to guarantee security and privacy. |
| [104] | 2019 |
| A cyber-defense approach based on a non-cooperative game algorithm was proposed to protect a UAV-enabled MEC from network and offloading attacks. |
| [105] | 2019 |
| A MEC server-based authentication framework was proposed to be integrated into UAVs. This was mainly to enhance the privacy and authentication of UAVs. |
| [106] | 2020 |
| A UAV-assisted multi-user MEC system based on frequency division multiple access (FDMA) under Rician’s fading channels was proposed to test task offloading and resource allocation performances. |
| [107] | 2019 |
| A theoretical game strategy based on three types of players was proposed to formulate and solve the problem of offloading task calculations in UAV-enabled MEC networks. |
| [108] | 2018 |
| In this work, a UAV was used as a mobile edge server to manage offloading processing tasks in real-time for ground-based users. A hybrid scheme based on a semi-Markov decision process and DL was proposed to maximize the throughput requirement. |
| [109] | 2020 |
| Two offloading schemes for multiple UAVs-enabled MEC networks were proposed to optimize computation time and energy consumption. A game theory model was adopted to validate the proposed strategies. |
| [110] | 2018 |
| A UAV-assisted MEC environment over the social internet of vehicles (SIoV) with a three-layer integrated architecture was adopted. Total utility maximization was achieved by jointly optimizing the transmission power of the vehicle and the UAV trajectory. |
| Addressed Issues | AI Approach | Metrics | References |
| Task offloading | RL | Energy consumption, processing time, latency | [115] |
| DRL | Energy consumption, latency, cost | [116] | |
| GA | Energy consumption, latency | [117,118] | |
| DL | Security, privacy, task prediction, and computation offloading | [119,120] | |
| FI | Execution time | [121] | |
| Resources allocation | RL | Resources allocation, energy | [122,123] |
| DRL | Latency, response time, resource utilization, energy consumption | [124,125] | |
| GA | Energy consumption, latency | [126] | |
| RL-ACO | Throughput | [123] | |
| Joint optimization issue | RL | Security and privacy, energy consumption | [127] |
| DRL | Cost, energy consumption, latency | [128] | |
| GA | Energy consumption, makespan | [129] | |
| DL | Energy consumption, cost | [130] | |
| RL-ACO | Energy consumption | [131] | |
| Security | RL | Security caching | [127] |
| Path planning | RL | Path planning | [35,132,133] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yazid, Y.; Ez-Zazi, I.; Guerrero-González, A.; El Oualkadi, A.; Arioua, M. UAV-Enabled Mobile Edge-Computing for IoT Based on AI: A Comprehensive Review. Drones 2021, 5, 148. https://doi.org/10.3390/drones5040148
Yazid Y, Ez-Zazi I, Guerrero-González A, El Oualkadi A, Arioua M. UAV-Enabled Mobile Edge-Computing for IoT Based on AI: A Comprehensive Review. Drones. 2021; 5(4):148. https://doi.org/10.3390/drones5040148
Chicago/Turabian StyleYazid, Yassine, Imad Ez-Zazi, Antonio Guerrero-González, Ahmed El Oualkadi, and Mounir Arioua. 2021. "UAV-Enabled Mobile Edge-Computing for IoT Based on AI: A Comprehensive Review" Drones 5, no. 4: 148. https://doi.org/10.3390/drones5040148
APA StyleYazid, Y., Ez-Zazi, I., Guerrero-González, A., El Oualkadi, A., & Arioua, M. (2021). UAV-Enabled Mobile Edge-Computing for IoT Based on AI: A Comprehensive Review. Drones, 5(4), 148. https://doi.org/10.3390/drones5040148