A UAV-Based Sensor System for Measuring Land Surface Albedo: Tested over a Boreal Peatland Ecosystem


 , ,
, ,
Abstract
:1. Introduction
2. System Development
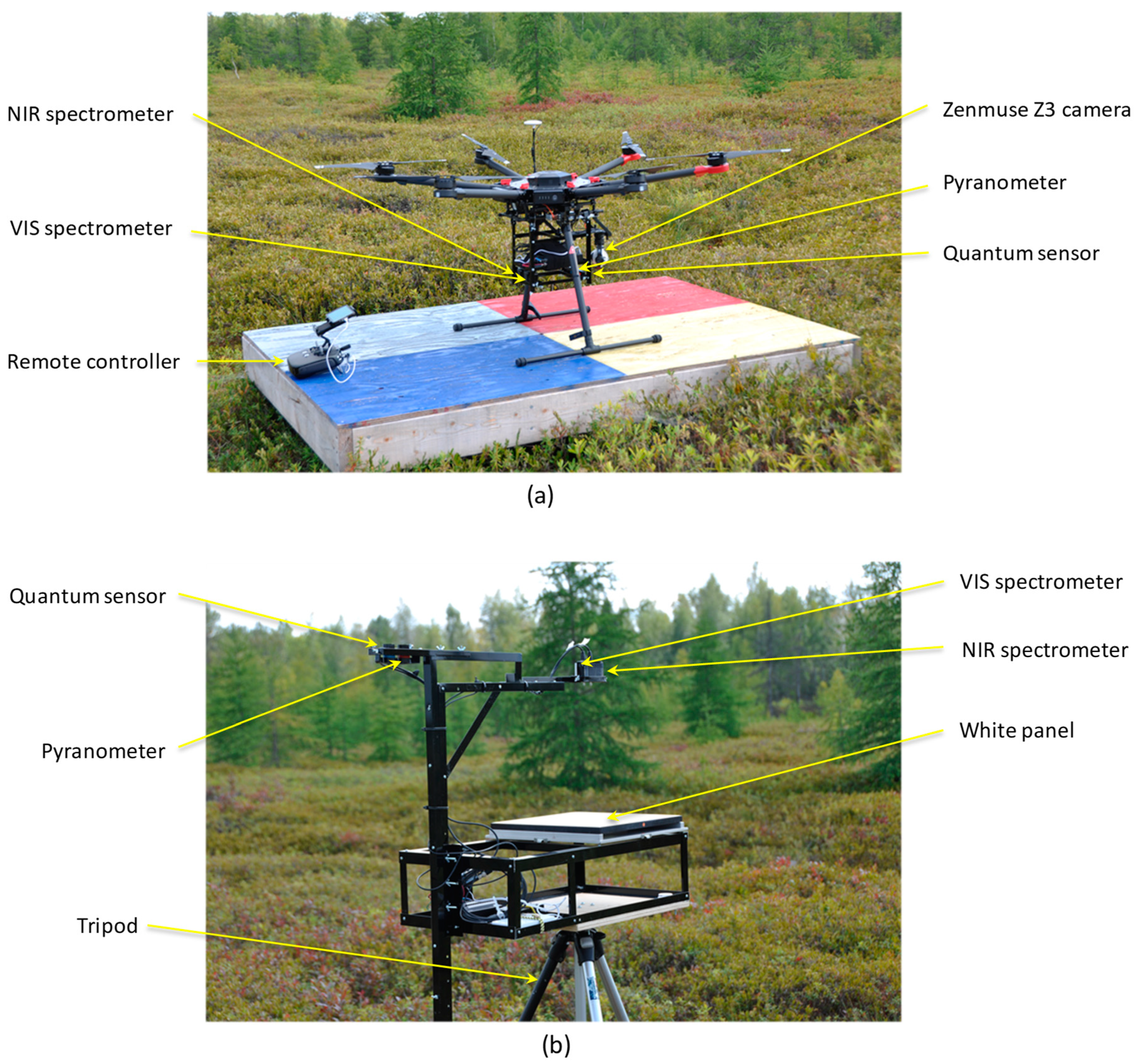
2.1. UAV Platform and Instruments
2.2. Systems Set-Up
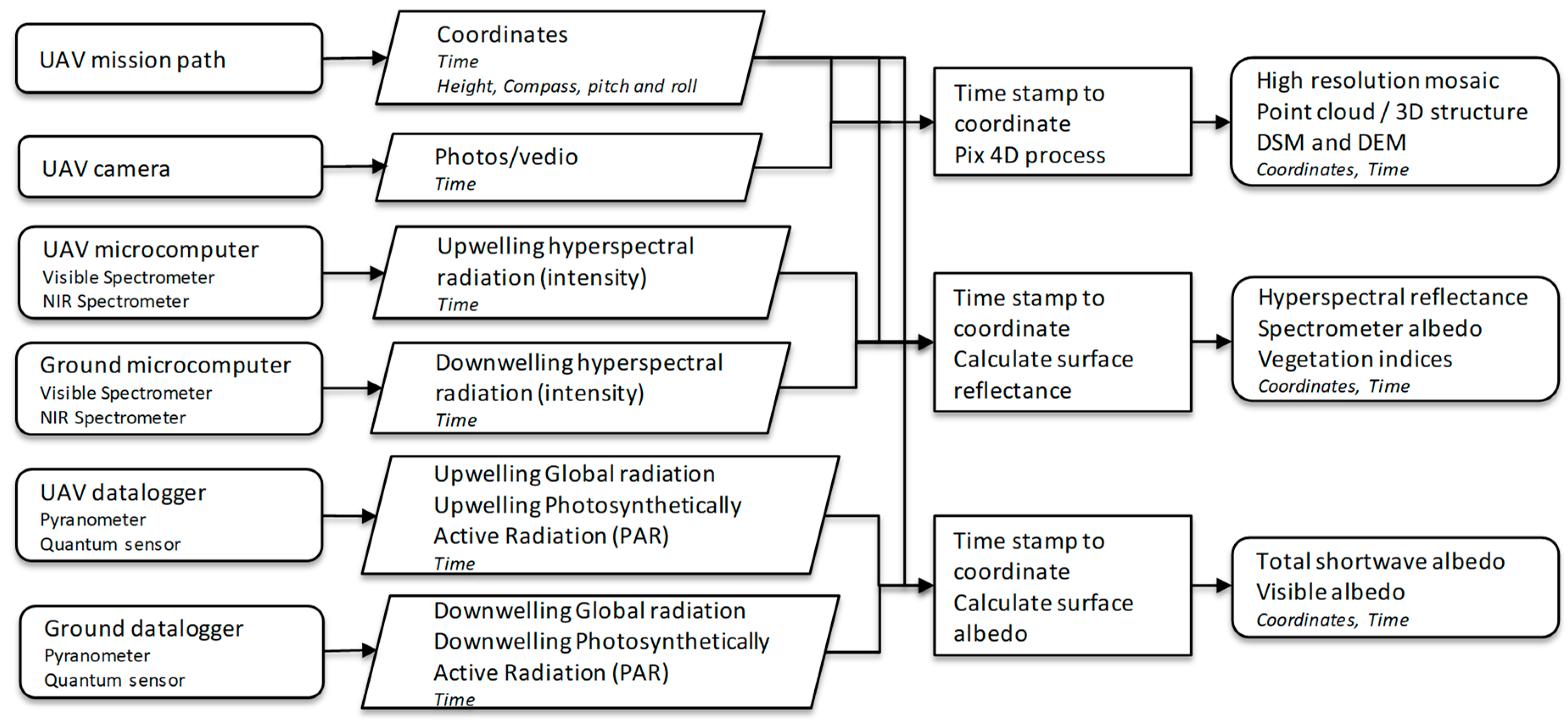
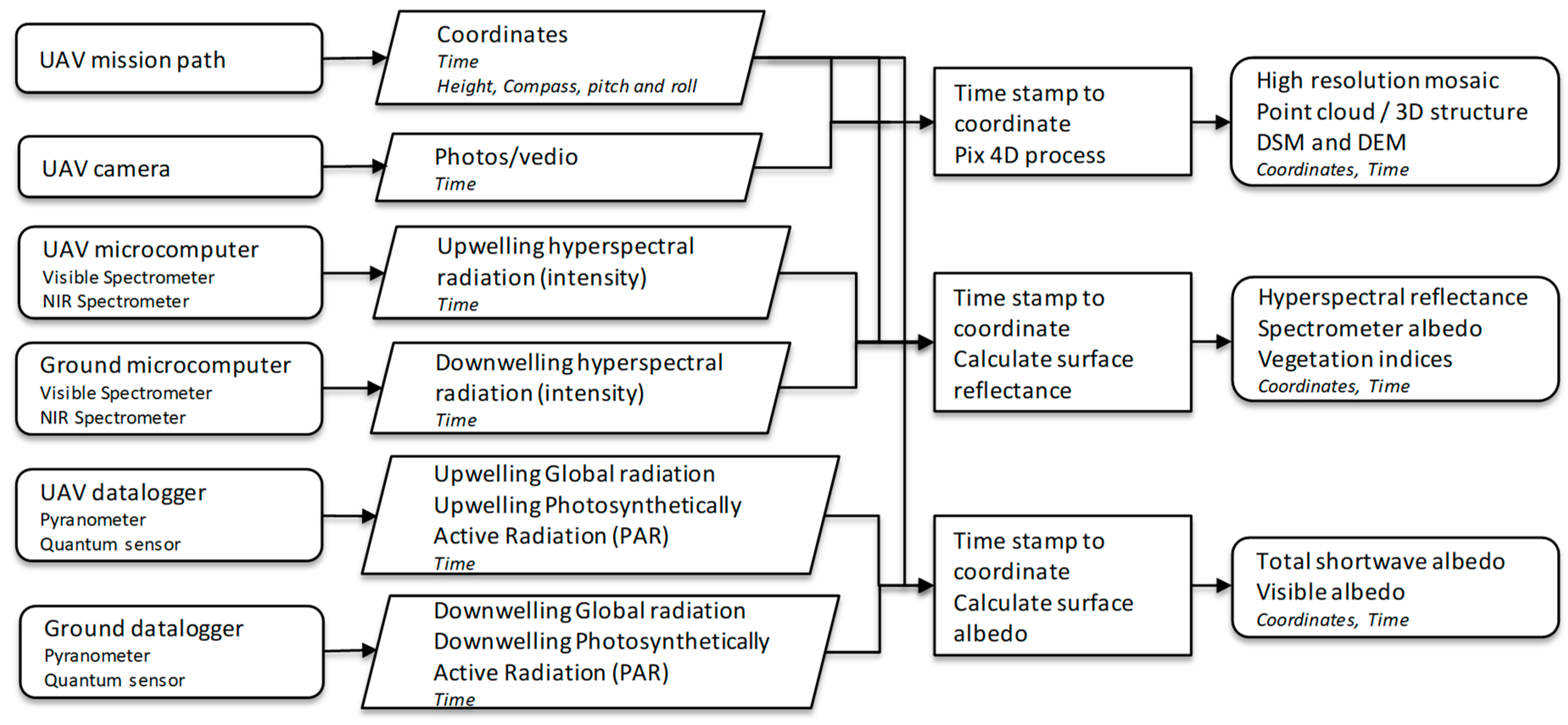
2.3. Data Processing Chain
3. Test Measurements at Mer Bleue Wetland
3.1. Study Area
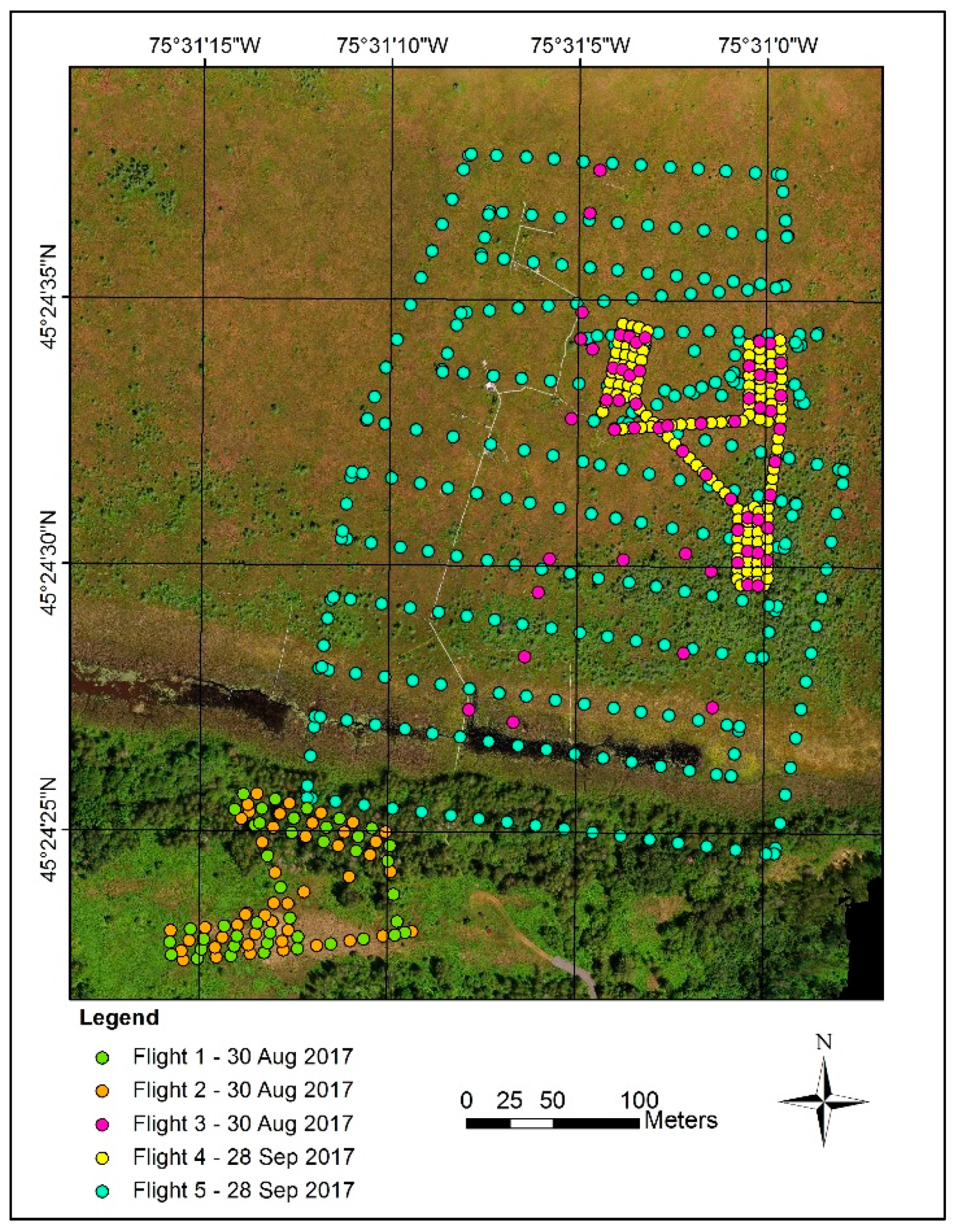
3.2. UAV Data Acquisition
3.3. Spectrometer Albedo Estimation
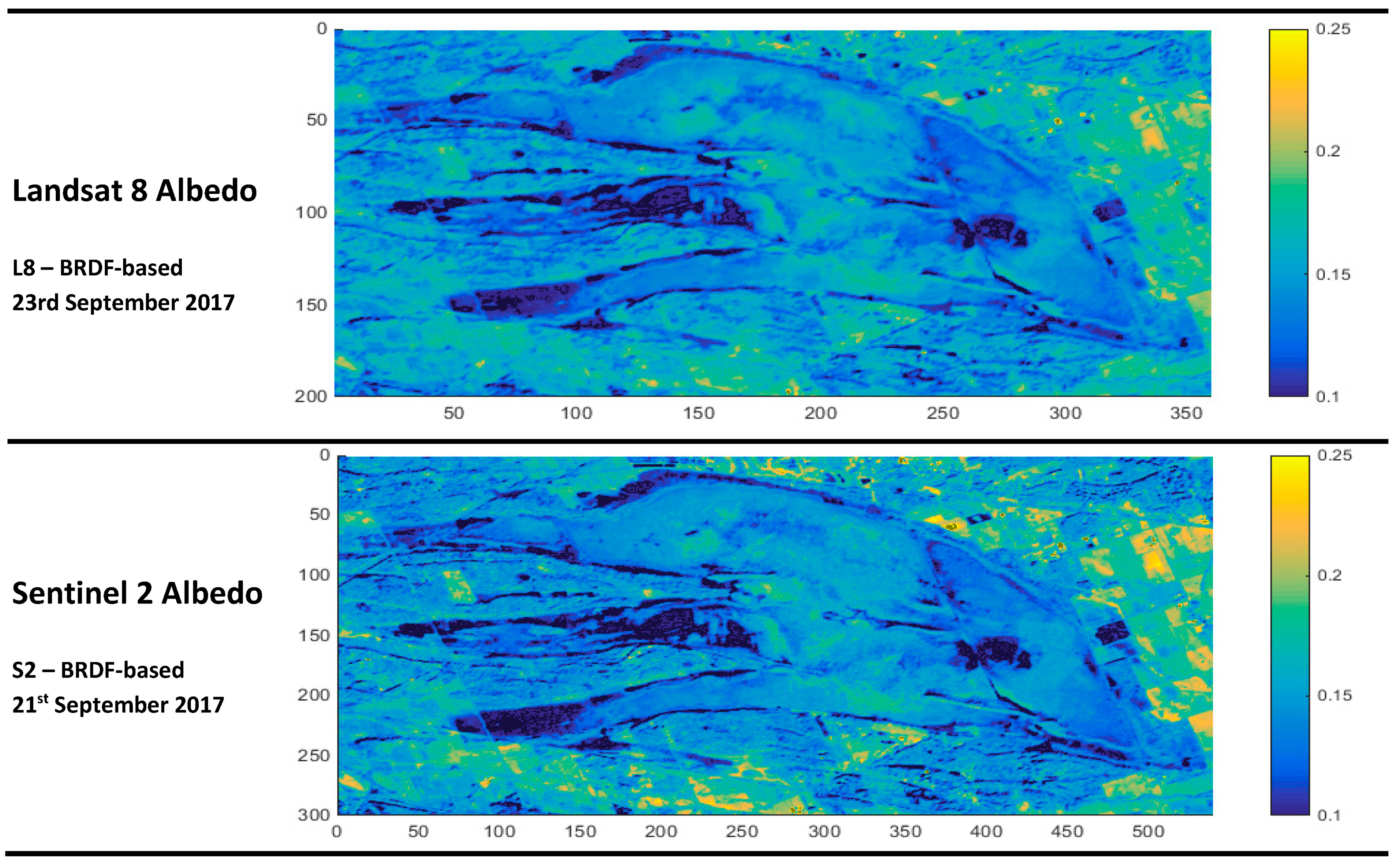
3.4. Satellite Based Albedo Estimation
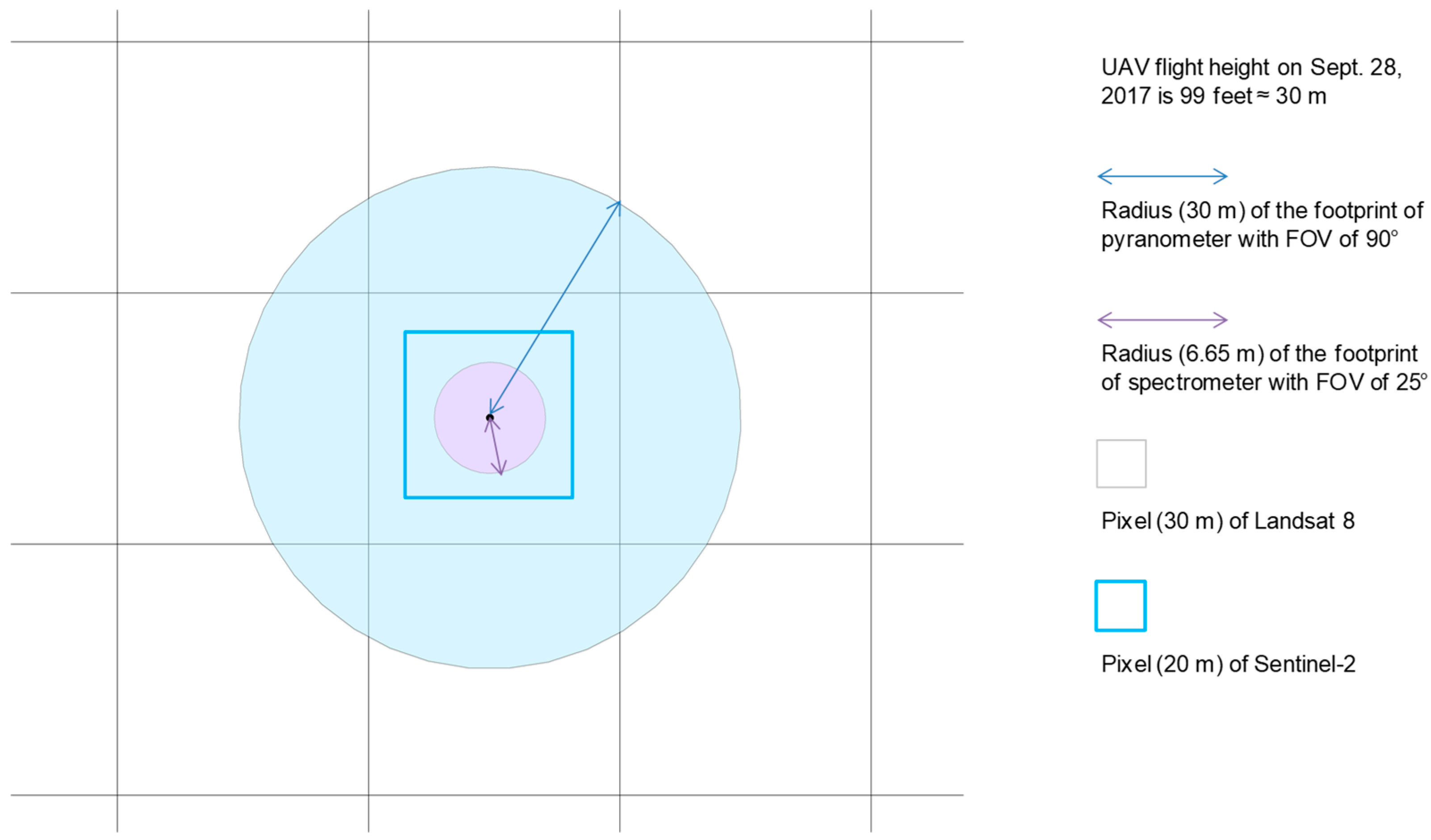
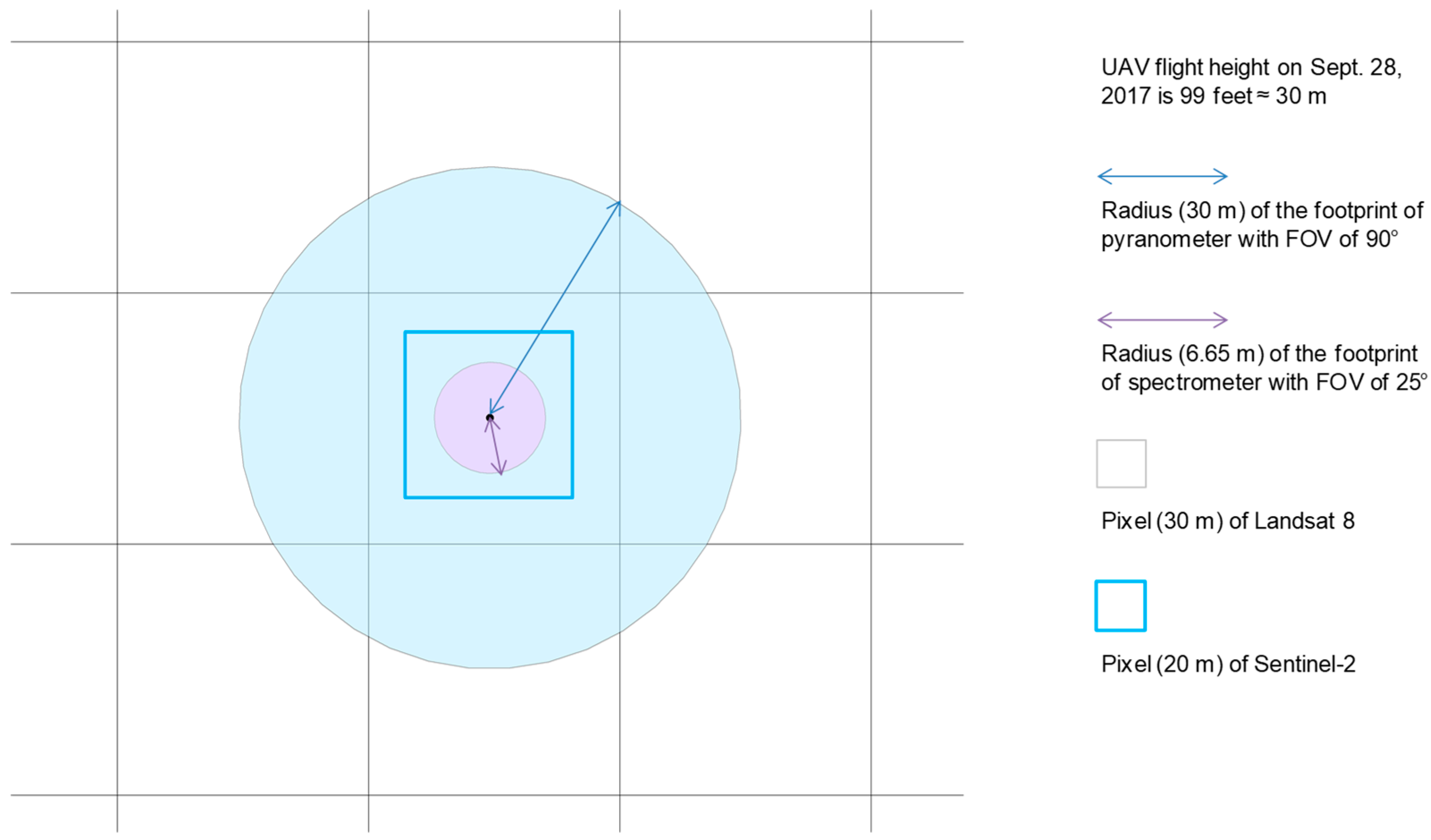
3.5. Scaling between Observations
4. Results
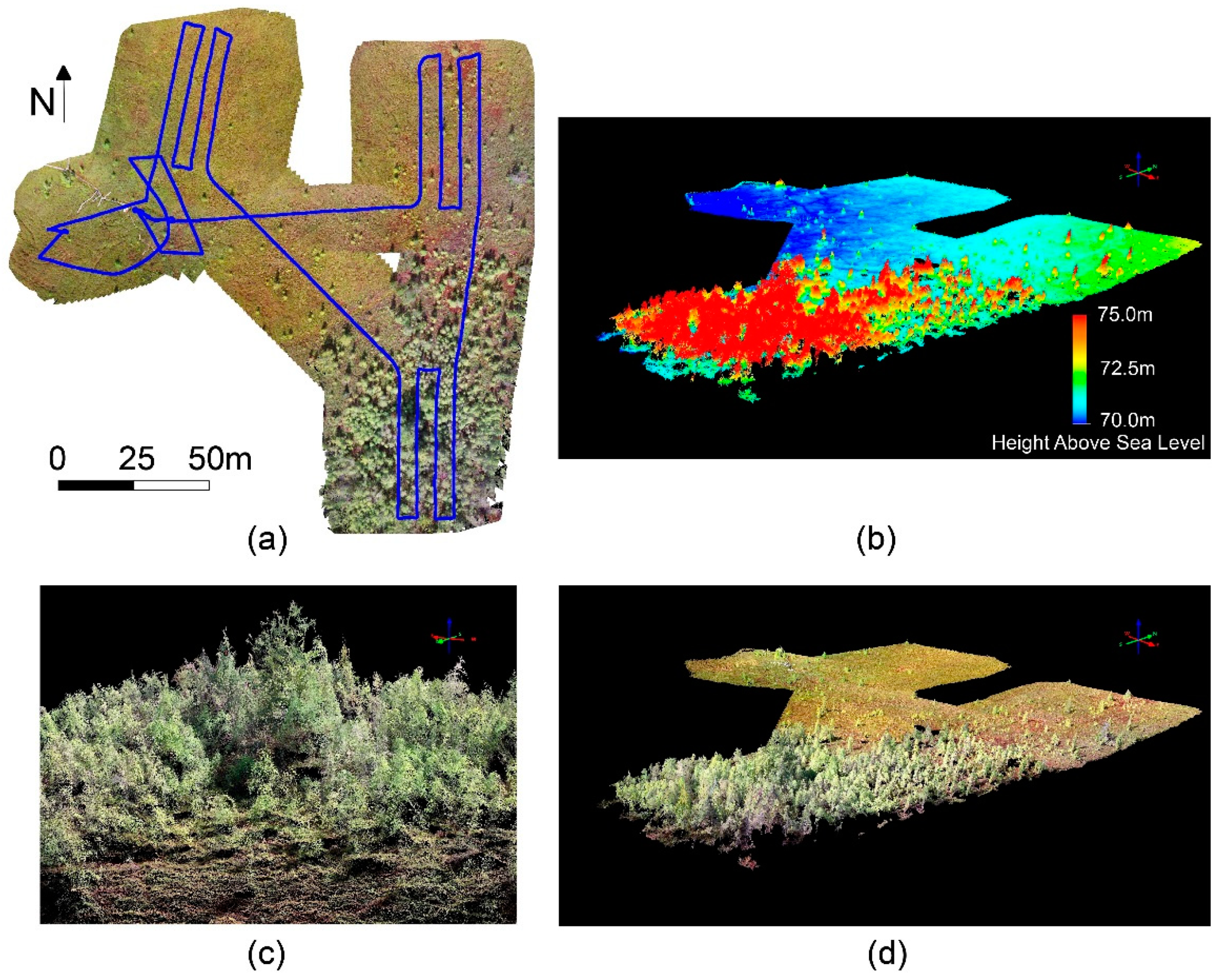
4.1. Orthomosaic and Point Cloud
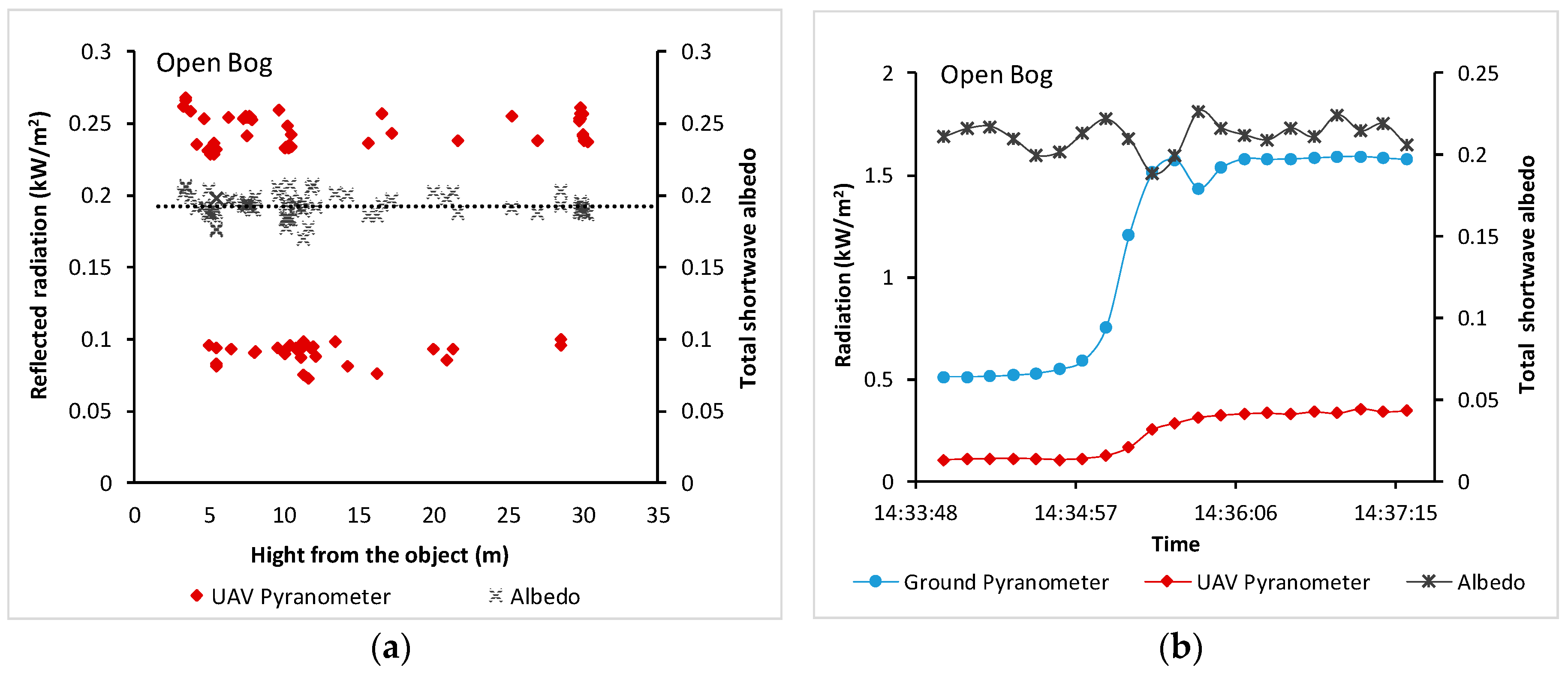
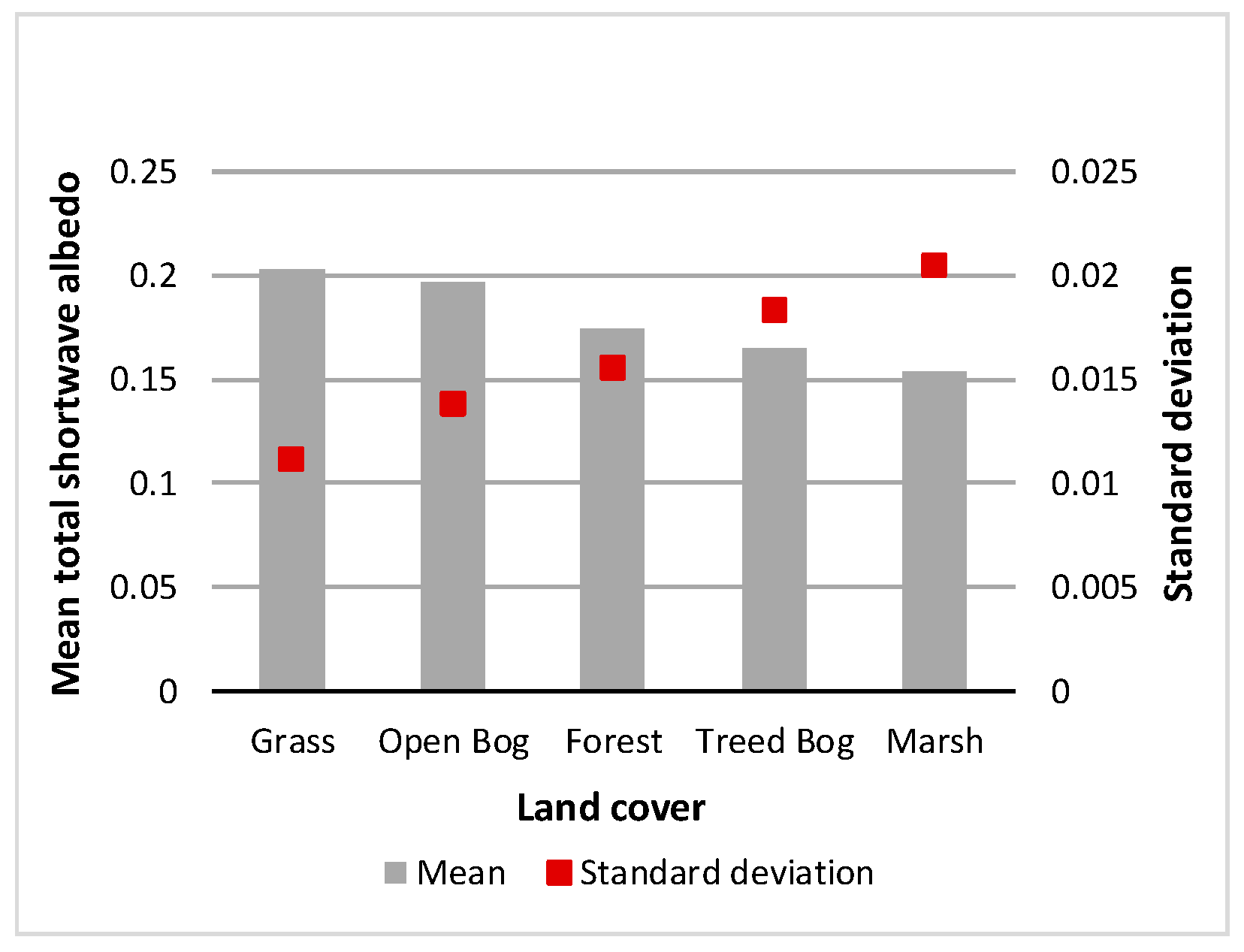
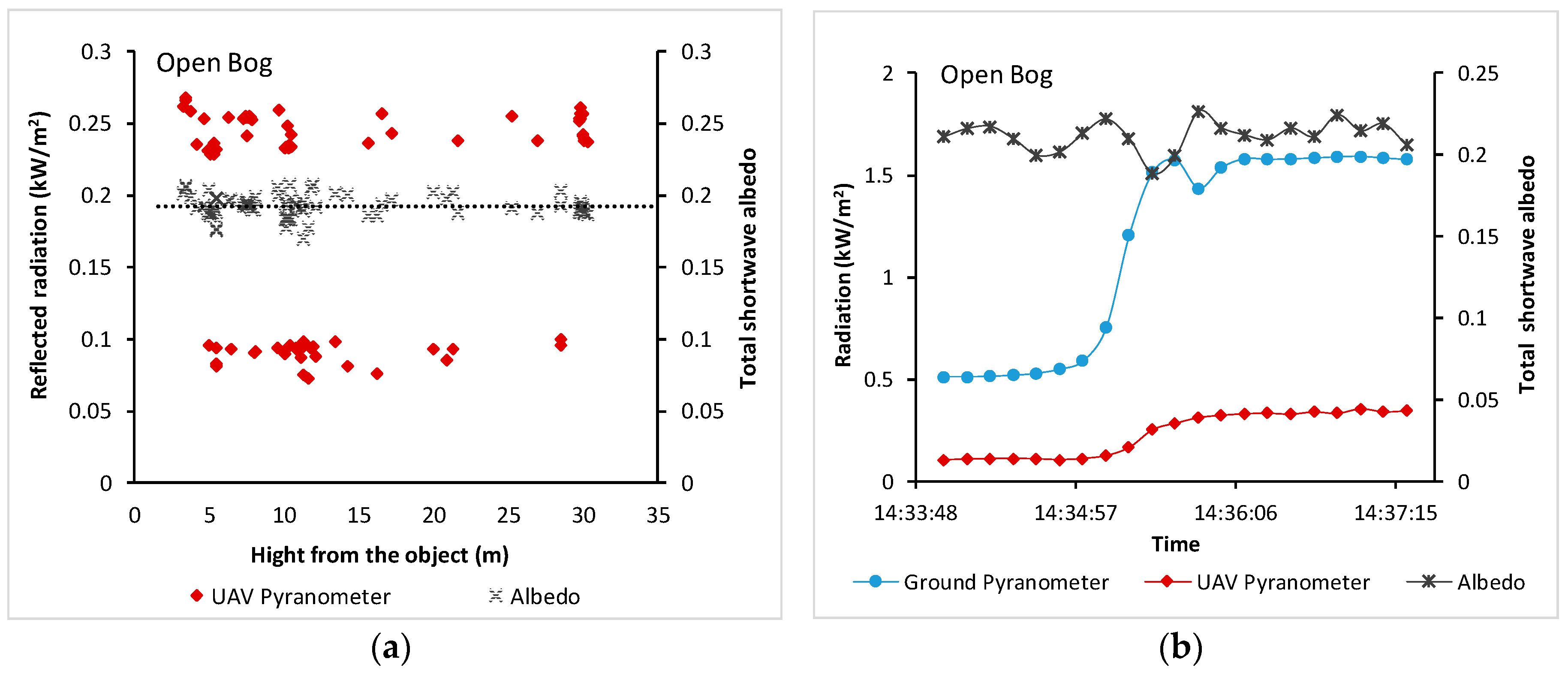
4.2. Total Shortwave Albedo from Pyranometer
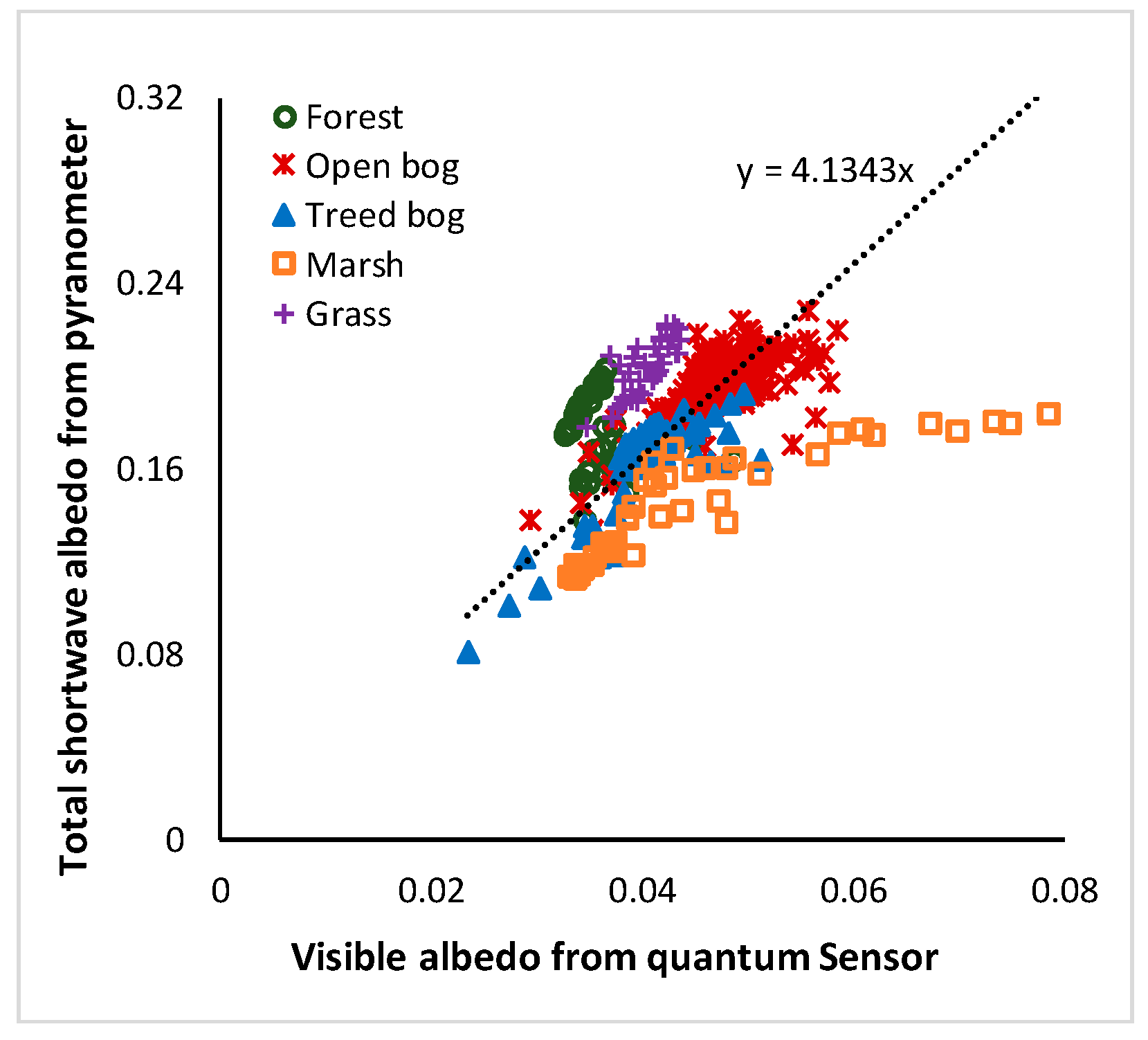
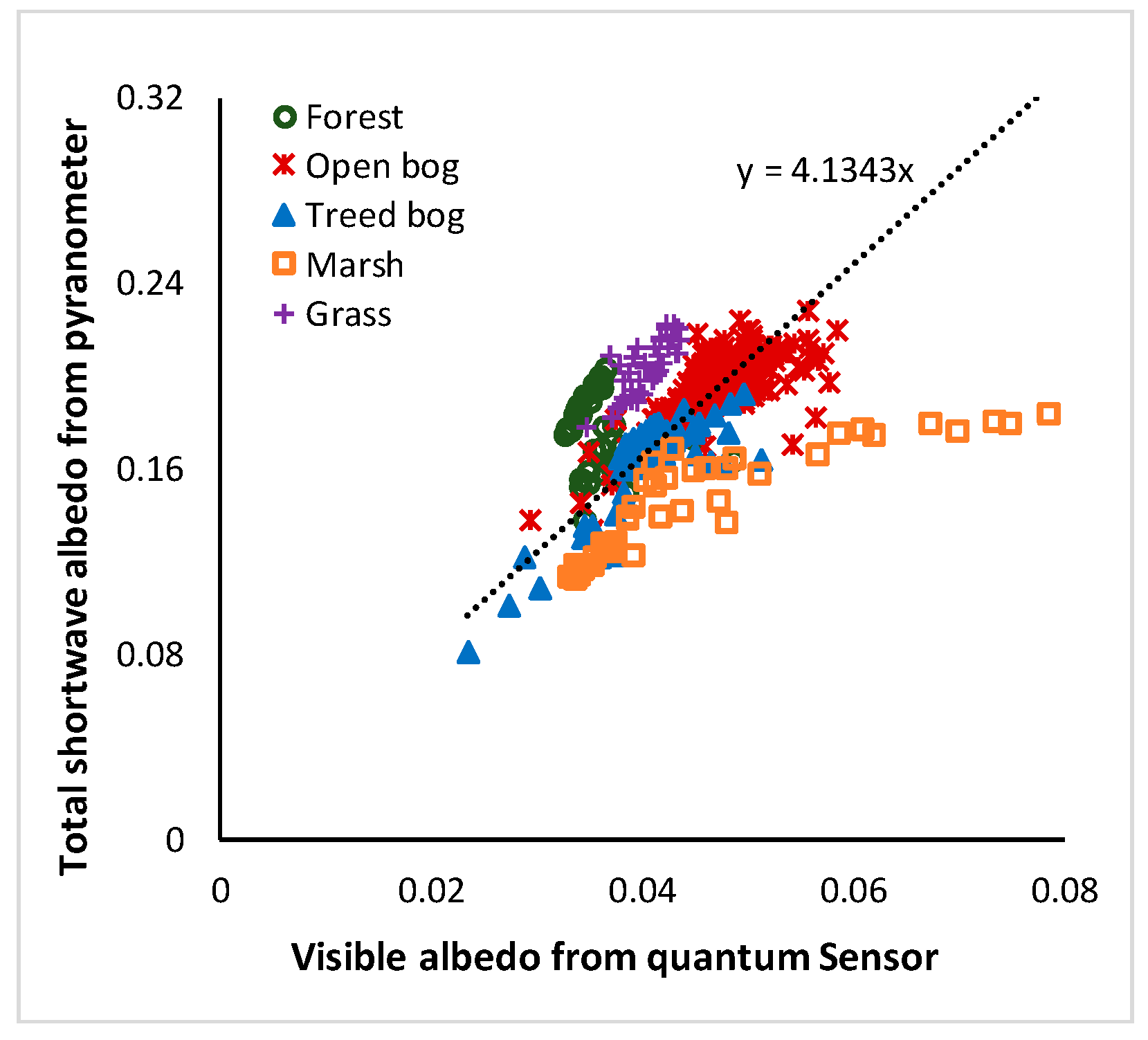
4.3. Visible Albedo from Quantum Sensor
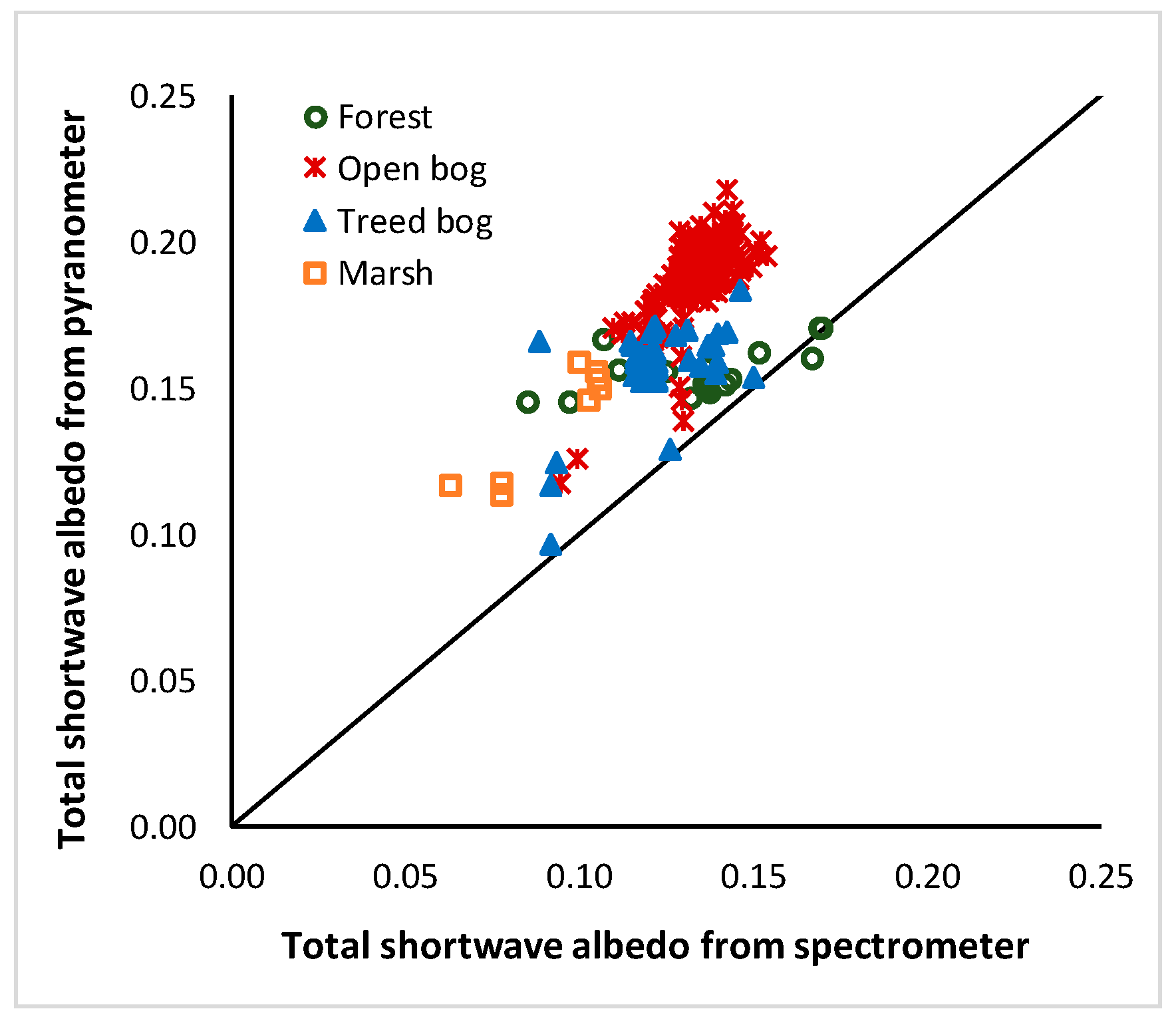
4.4. Hyperspectral Reflectance and Total Shortwave Albedo from Spectrometer
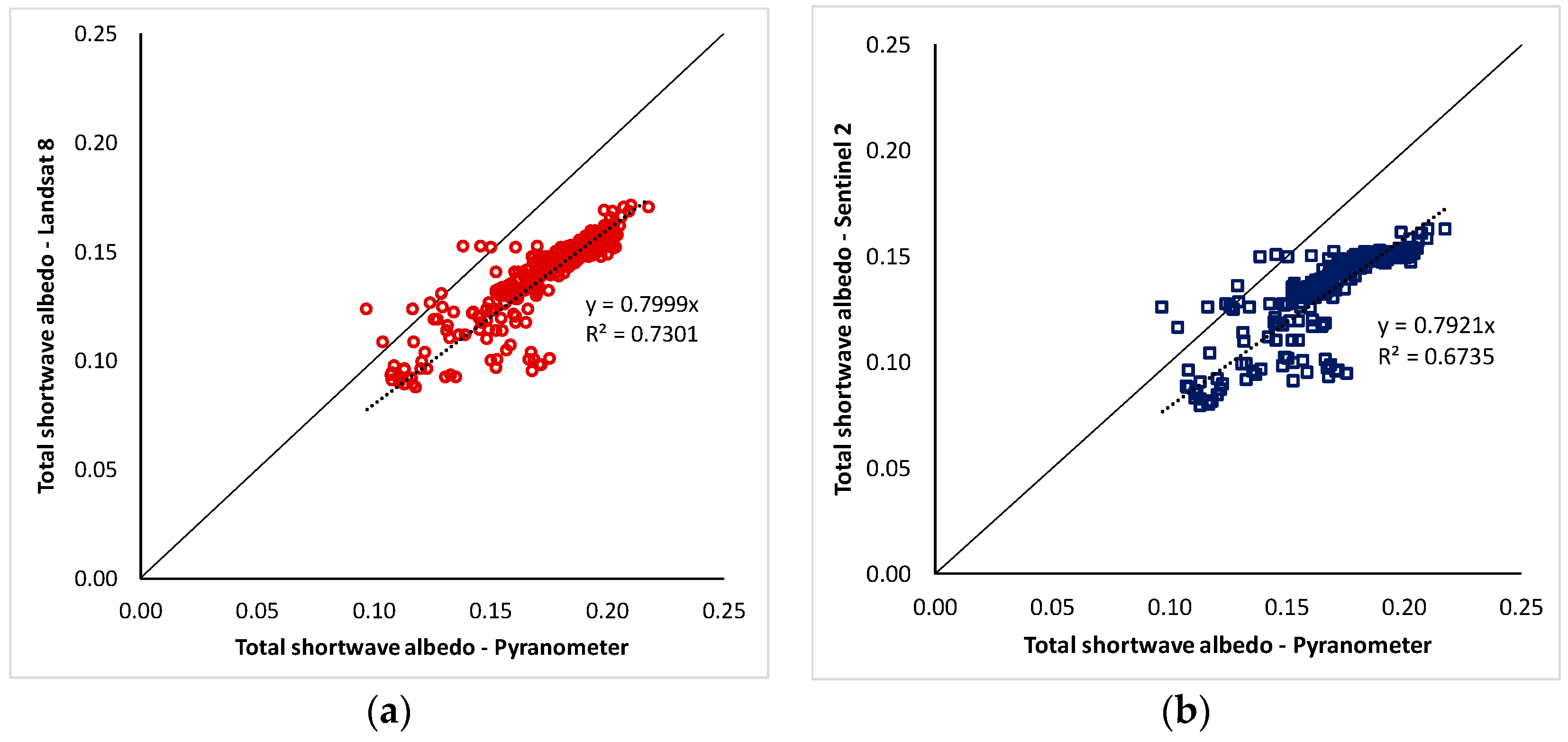
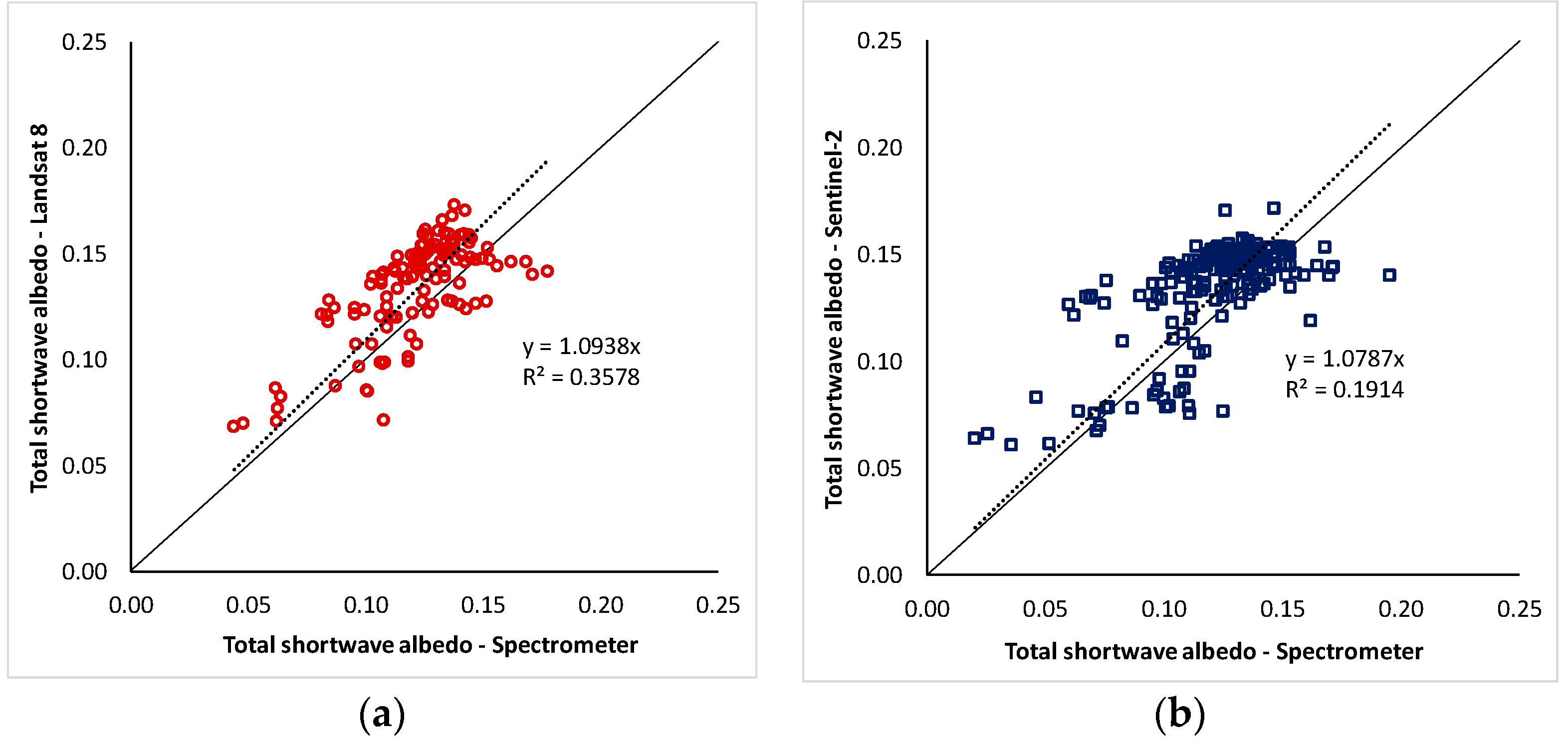
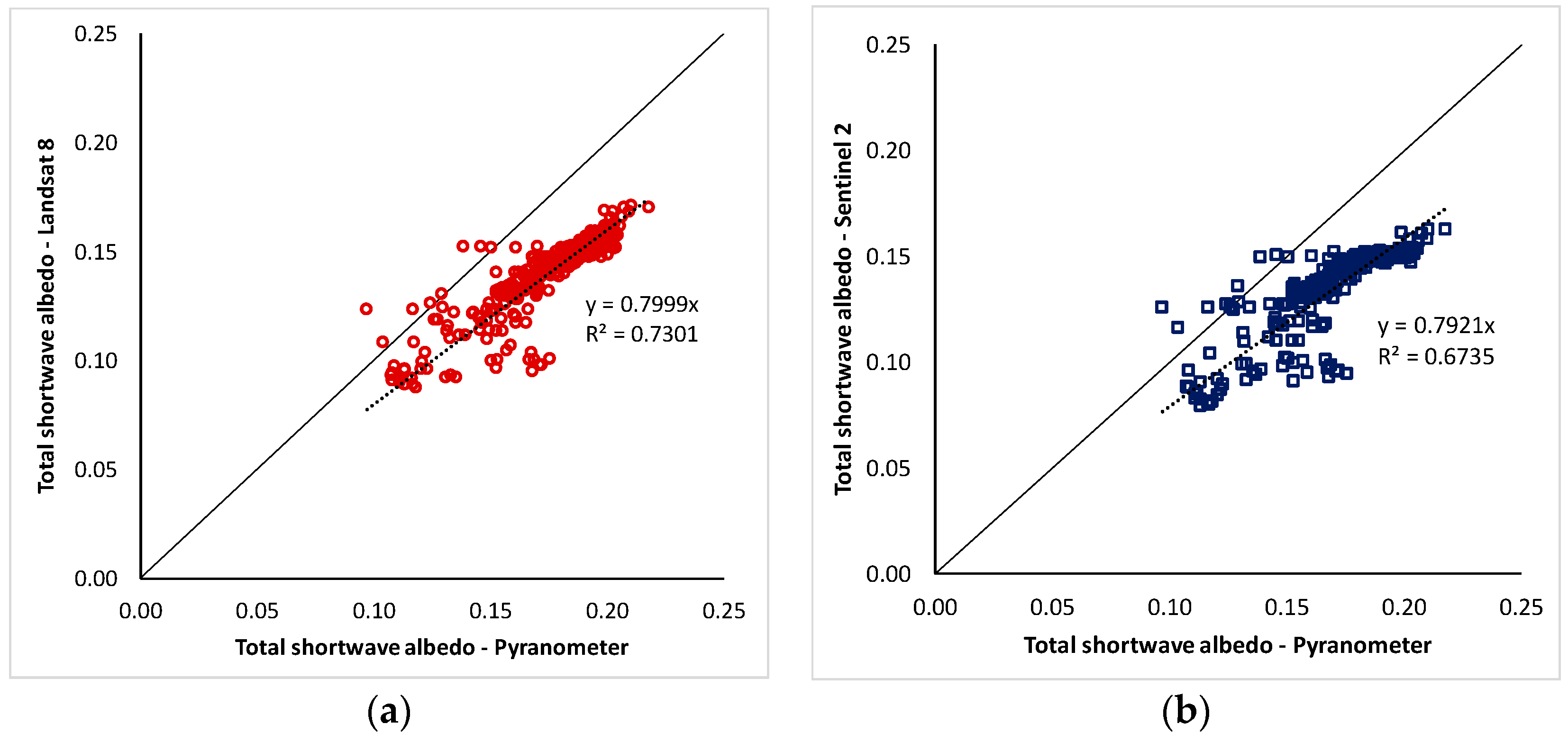
4.5. Comparison UAV-Derived Albedo with Satellite-Derived Albedo
5. Discussion
5.1. Operational UAV Concerns
5.2. Issues Related to Mini-Sensors
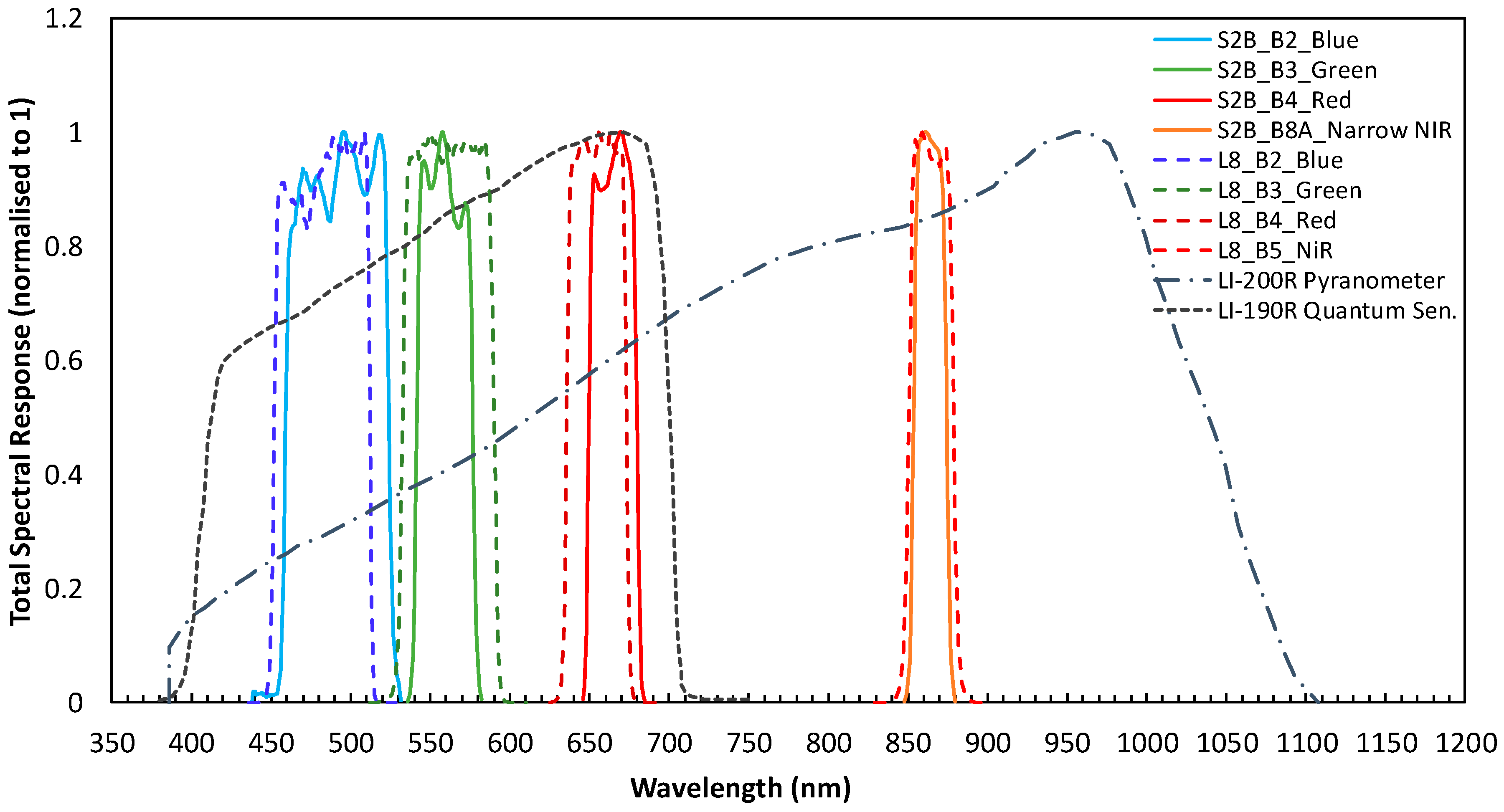
5.3. Spectral Response Functions
5.4. Satellite Based Albedo Estimation
5.5. Field of View
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, S.; Trishchenko, A.P.; Sun, X. Simulation of canopy radiation transfer and surface albedo in the EALCO model. Clim. Dyn. 2007, 29, 615–632. [Google Scholar] [CrossRef]
- Franch, B.; Vermote, E.; Claverie, M. Intercomparison of Landsat albedo retrieval techniques and evaluation against in situ measurements across the US SURFRAD network. Remote Sens. Environ. 2014, 152, 627–637. [Google Scholar] [CrossRef]
- Carter, G.A. Responses of leaf spectral reflectance to plant stress. Am. J. Bot. 1993, 80, 239–243. [Google Scholar] [CrossRef]
- Davidson, A.; Wang, S. The effects of sampling resolution on the albedos of dominant land cover types in the North American boreal region. Remote Sens. Environ. 2004, 93, 211–224. [Google Scholar] [CrossRef]
- Davidson, A.; Wang, S. Spatio-temporal variations in land surface albedo across Canada from MODIS observations. Can. J. Remote Sens. 2005, 31, 377–390. [Google Scholar] [CrossRef]
- Hanesiak, J.M.; Stewart, R.E.; Bonsal, B.R. Characterization and summary of the 1999-2005 Canadian prairie drought. Atmos. Ocean 2011, 49, 1–32. [Google Scholar] [CrossRef]
- Wang, S.; Trishchenko, A.P.; Khlopenkov, K.V.; Davidson, A. Comparison of International Panel on Climate Change Fourth Assessment Report climate model simulations of surface albedo with satellite products over northern latitudes. J. Geophys. Res. 2006, 111, D21108. [Google Scholar] [CrossRef]
- Betts, A.K.; Ball, J.H. Albedo over the boreal forest. J. Geophys. Res. 1997, 102, 28901–28910. [Google Scholar] [CrossRef]
- Qu, Y.; Liang, S.; Liu, Q.; He, T.; Liu, S.; Li, X. Mapping surface broadband albedo from satellite observations: A review of literatures on algorithms and products. Remote Sens. 2015, 7, 990–1020. [Google Scholar] [CrossRef]
- Schaaf, C.B.; Gao, F.; Strahler, A.H.; Lucht, W.; Li, X.; Tsang, T.; Strugnell, N.C.; Zhang, X.; Jin, Y.; Muller, J.P.; et al. First operational BRDF, albedo nadir reflectance products from MODIS. Remote Sens. Environ. 2002, 83, 135–148. [Google Scholar] [CrossRef]
- Trishchenko, A.P.; Luo, Y.; Khlopenkov, K.V.; Wang, S. A method to derive the multi-spectral surface albedo consistent with MODIS from historical AVHRR and VGT satellite data. J. Appl. Meteorol. Climatol. 2008, 47, 1199–1221. [Google Scholar] [CrossRef]
- Maignan, F.; Bréon, F.M.; Lacaze, R. Bidirectional reflectance of Earth targets: Evaluation of analytical models using a large set of spaceborne measurements with emphasis on the Hot Spot. Remote Sens. Environ. 2004, 90, 210–220. [Google Scholar] [CrossRef]
- Geiger, B.; Carrer, D.; Franchistéguy, L.; Roujean, J.L.; Meurey, C. Land surface albedo derived on a daily basis from Meteosat Second Generation observations. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3841–3856. [Google Scholar] [CrossRef]
- Ryan, J.C.; Hubbard, A.; Box, J.E.; Brough, S.; Cameron, K.; Cook, J.M.; Cooper, M.; Doyle, S.H.; Edwards, A.; Holt, T. Derivation of high spatial resolution albedo from UAV digital imagery: Application over the Greenland Ice Sheet. Front. Earth Sci. 2017, 5, 40. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Burkhart, J.F.; Kylling, A.; Schaaf, C.B.; Wang, Z.; Bogren, W.; Storvold, R.; Solbø, S.; Pedersen, C.A.; Gerland, S. Unmanned aerial system nadir reflectance and MODIS nadir BRDF-adjusted surface reflectances intercompared over Greenland. Cryosphere 2017, 11, 1575. [Google Scholar] [CrossRef]
- Rippin, D.M.; Pomfret, A.; King, N. High resolution mapping of supra-glacial drainage pathways reveals link between micro-channel drainage density, surface roughness and surface reflectance. Earth Surf. Process. Landf. 2015, 40, 1279–1290. [Google Scholar] [CrossRef]
- Ryan, J.C.; Hubbard, A.; Stibal, M.; Box, J.E. Attribution of Greenland’s ablating ice surfaces on ice sheet albedo using unmanned aerial systems. Cryosphere Discuss. 2016. [Google Scholar] [CrossRef]
- DJI. Matrice 600 User Manual DJI. 2016. Available online: https://dl.djicdn.com/downloads/m600/20170717/Matrice_600_User_Manual_v1.0_EN.pdf (accessed on 1 February 2017).
- Li-Cor. Principles of Radiation Measurement. LI-COR Ltd., 2015. Available online: https://licor.app.boxenterprise.net/s/liuswfuvtqn7e9loxaut (accessed on 5 February 2017).
- Mac Arthur, A. Field Guide for the ASD Fieldspec Pro Radiance/Irradiance Measurements in Raw DN Mode; ASD Raw DN Mode Field User Note; NERC FSF: Edinburgh, UK, 2007. [Google Scholar]
- Ocean Optics. STS Developer’s Kit—Installation and Operation Manual; Ocean Optics Inc.: Largo, FL, USA, 2014; Available online: http://oceanoptics.com/wp-content/uploads/STSDevKitIO.pdf (accessed on 27 March 2017).
- OceanView. OceanView Installation and Operation Manual; Ocean Optics Inc.: Largo, FL, USA, 2013; Available online: http://oceanoptics.com/wp-content/uploads/OceanViewIO.pdf (accessed on 24 March 2017).
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. Structure-from-Motion photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Zeng, C.; King, D.J.; Richardson, M.; Shan, B. Fusion of Multispectral Imagery and Spectrometer Data in UAV Remote Sensing. Remote Sens. 2017, 9, 696. [Google Scholar] [CrossRef]
- Frolking, S.; Roulet, N.T.; Moore, T.R.; Lafleur, P.M.; Bubier, J.L.; Crill, P.M. Modeling seasonal to annual carbon balance of Mer Bleue Bog, Ontario, Canada. Glob. Biogeochem. Cycles 2002, 16, 4-1–4-21. [Google Scholar] [CrossRef]
- Knap, W.H.; Reijmer, C.H. Anisotropy of the Reflected Radiation Field Over Melting Glacier Ice: Measurements in Landsat TM Bands 2 and 4. Remote Sens. Environ. 1998, 65, 93–104. [Google Scholar] [CrossRef]
- Knap, W.; Reijmer, C.; Oerlemans, J. Narrowband to broadband conversion of Landsat TM glacier albedos. Int. J. Remote Sens. 1999, 20, 2091–2110. [Google Scholar] [CrossRef]
- Loveland, T.R.; Irons, J.R. Landsat 8: The plans, the reality, and the legacy. Remote Sens. Environ. 2016, 185, 1–6. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Roy, D.P.; Zhang, H.; Ju, J.; Gomez-Dans, J.L.; Lewis, P.E.; Schaaf, C.; Sun, Q.; Li, J.; Huang, H.; Kovalskyy, V. A general method to normalize Landsat reflectance data to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2016, 176, 255–271. [Google Scholar] [CrossRef]
- Wang, Z.; Schaaf, C.B.; Sun, Q.; Kim, J.; Erb, A.M.; Gao, F.; Román, M.O.; Yang, Y.; Petroy, S.; Taylor, J.R.; et al. Monitoring land surface albedo and vegetation dynamics using high spatial and temporal resolution synthetic time series from Landsat and the MODIS BRDF/NBAR/albedo product. Int. J. Appl. Earth Obs. Geoinform. 2017, 59, 104–117. [Google Scholar] [CrossRef]
- Liang, S. Narrowband to broadband conversions of land surface albedo I: Algorithms. Remote Sens. Environ. 2001, 76, 213–238. [Google Scholar] [CrossRef]
- Naegeli, K.; Damm, A.; Huss, M.; Wulf, H.; Schaepman, M.; Hoelzle, M. Cross-Comparison of albedo products for glacier surfaces derived from airborne and satellite (Sentinel-2 and Landsat 8) optical data. Remote Sens. 2017, 9, 110. [Google Scholar] [CrossRef]
- Cescatti, A.; Marcolla, B.; Santhana Vannan, S.K.; Pan, J.Y.; Román, M.O.; Yang, X.; Ciais, p.; Cook, R.B.; Law, B.E.; Matteucci, G.; Migliavacca, M.; et al. Intercomparison of MODIS albedo retrievals and in situ measurements across the global FLUXNET network. Remote Sens. Environ. 2012, 121, 323–334. [Google Scholar] [CrossRef]
- Chen, J.M.; Liu, J.; Leblanc, S.G.; Lacaze, R.; Roujean, J.L. Multi-angular optical remote sensing for assessing vegetation structure and carbon absorption. Remote Sens. Environ. 2003, 84, 516–525. [Google Scholar] [CrossRef]
- Coakley, J.A. Reflectance and albedo, surface. In Encyclopedia of Atmospheric Sciences; Holton, J.R., Curry, J.A., Pyle, J.A., Eds.; Academic Press: Cambridge, MA, USA, 2003; pp. 1914–1923. [Google Scholar]
- Liang, S.; Strahler, A.H.; Walthall, C. Retrieval of land surface albedo from satellite observations: A simulation study. J. Appl. Meteorol. 1999, 38, 712–725. [Google Scholar] [CrossRef]
- Colwell, J.E. Vegetation canopy reflectance. Remote Sens. Environ. 1974, 3, 175–183. [Google Scholar] [CrossRef]
- Canisius, F.; Fernandes, R. Evaluation of the information content of Medium Resolution Imaging Spectrometer (MERIS) data for regional leaf area index assessment. Remote Sens. Environ. 2012, 119, 301–314. [Google Scholar] [CrossRef]
- Garbulsky, M.F.; Peñuelas, J.; Gamon, J.; Inoue, Y.; Filella, I. The photochemical reflectance index (PRI) and the remote sensing of leaf, canopy and ecosystem radiation use efficiencies. A review and meta-analysis. Remote Sens. Environ. 2011, 115, 281–297. [Google Scholar] [CrossRef]
- Stroeve, J.; Box, J.E.; Gao, F.; Liang, S.L.; Nolin, A.; Schaaf, C. Accuracy assessment of the MODIS 16-day albedo product for snow: Comparisons with Greenland in situ measurements. Remote Sens. Environ. 2005, 94, 46–60. [Google Scholar] [CrossRef]
- Pimentel, R.; Aguilar, C.; Herrero, J.; Pérez-Palazón, M.; Polo, M. Comparison between Snow Albedo Obtained from Landsat TM, ETM+ Imagery and the SPOT VEGETATION Albedo Product in a Mediterranean Mountainous Site. Hydrology 2016, 3, 10. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV/Satellite Sensors | Flight Altitude | FOV | Ground Footprint (Diameter) |
|---|---|---|---|
| UAV camera | 30 m | - | 1.84 cm |
| UAV spectrometer | 30 m | 25° | 13.3 m |
| UAV pyranometer/ UAV quantum sensor | 30 m | 180° – true FOV | Infinite |
| 172° – restricted FOV | 858 m | ||
| 90° – restricted FOV | 60 m | ||
| Sentinel-2 | - | - | 20 m |
| Landsat 8 OLI | - | - | 30 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canisius, F.; Wang, S.; Croft, H.; Leblanc, S.G.; Russell, H.A.J.; Chen, J.; Wang, R. A UAV-Based Sensor System for Measuring Land Surface Albedo: Tested over a Boreal Peatland Ecosystem. Drones 2019, 3, 27. https://doi.org/10.3390/drones3010027
Canisius F, Wang S, Croft H, Leblanc SG, Russell HAJ, Chen J, Wang R. A UAV-Based Sensor System for Measuring Land Surface Albedo: Tested over a Boreal Peatland Ecosystem. Drones. 2019; 3(1):27. https://doi.org/10.3390/drones3010027
Chicago/Turabian StyleCanisius, Francis, Shusen Wang, Holly Croft, Sylvain G. Leblanc, Hazen A. J. Russell, Jing Chen, and Rong Wang. 2019. "A UAV-Based Sensor System for Measuring Land Surface Albedo: Tested over a Boreal Peatland Ecosystem" Drones 3, no. 1: 27. https://doi.org/10.3390/drones3010027
APA StyleCanisius, F., Wang, S., Croft, H., Leblanc, S. G., Russell, H. A. J., Chen, J., & Wang, R. (2019). A UAV-Based Sensor System for Measuring Land Surface Albedo: Tested over a Boreal Peatland Ecosystem. Drones, 3(1), 27. https://doi.org/10.3390/drones3010027