Investigations on Long-Range AFM Scans Using a Nanofabrication Machine (NFM-100) †



{kind=link}
Abstract
:1. Introduction
2. Design of the Nano Fabrication Machine 100 and the Mounted AFM System
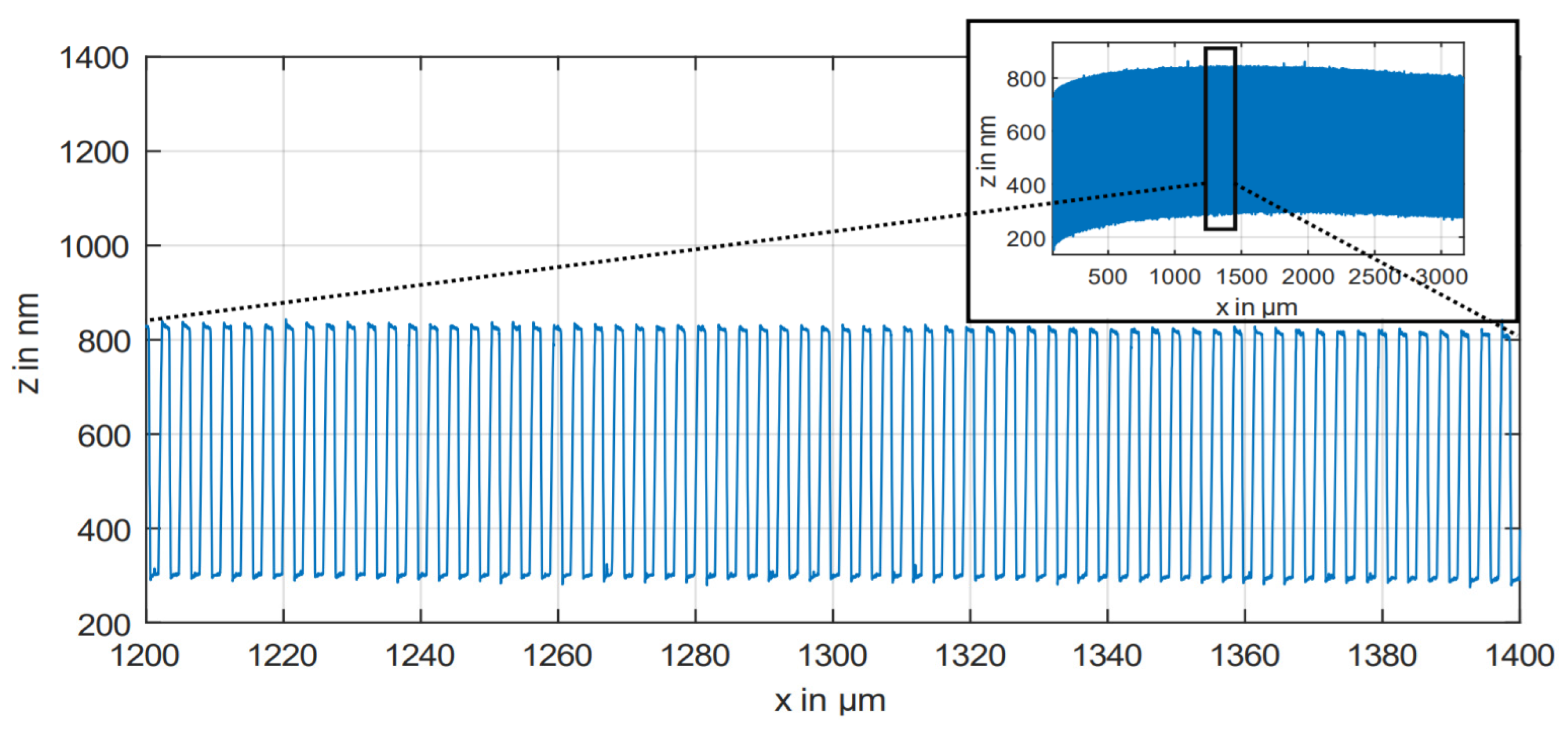
3. AFM Scan Results over Long Range
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ortlepp, I.; Kühnel, M.; Hofmann, M.; Weidenfeller, L.; Kirchner, J.; Supreeti, S.; Mastylo, R.; Holz, M.; Michels, T.; Füßl, R.; et al. Tip- and Laser-Based Nanofabrication up to 100 mm with sub-Nanometer Precision; SPIE Advanced Lithography: San Jose, CA, USA, 2020; p. 11324-8. [Google Scholar]
- Hesse, S.; Schäffel, C.; Mohr, H.U.; Katschmann, M.; Büchner, H.J. Design and performance of an interferometric controlled planar nanopositioning system. Meas. Sci. Technol. 2012, 23, 074011. [Google Scholar] [CrossRef]
- Rangelow, I.W.; Ivanov, T.; Hudek, T.P.; Fortagne, O. Device and Method for Mask-Less AFM Microlithography. U.S. Patent 7, 141,808, 2005. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stauffenberg, J.; Ortlepp, I.; Reuter, C.; Holz, M.; Dontsov, D.; Schäffel, C.; Strehle, S.; Zöllner, J.-P.; Rangelow, I.W.; Manske, E. Investigations on Long-Range AFM Scans Using a Nanofabrication Machine (NFM-100). Proceedings 2020, 56, 34. https://doi.org/10.3390/proceedings2020056034
Stauffenberg J, Ortlepp I, Reuter C, Holz M, Dontsov D, Schäffel C, Strehle S, Zöllner J-P, Rangelow IW, Manske E. Investigations on Long-Range AFM Scans Using a Nanofabrication Machine (NFM-100). Proceedings. 2020; 56(1):34. https://doi.org/10.3390/proceedings2020056034
Chicago/Turabian StyleStauffenberg, Jaqueline, Ingo Ortlepp, Christoph Reuter, Mathias Holz, Denis Dontsov, Christoph Schäffel, Steffen Strehle, Jens-Peter Zöllner, Ivo W. Rangelow, and Eberhard Manske. 2020. "Investigations on Long-Range AFM Scans Using a Nanofabrication Machine (NFM-100)" Proceedings 56, no. 1: 34. https://doi.org/10.3390/proceedings2020056034
APA StyleStauffenberg, J., Ortlepp, I., Reuter, C., Holz, M., Dontsov, D., Schäffel, C., Strehle, S., Zöllner, J.-P., Rangelow, I. W., & Manske, E. (2020). Investigations on Long-Range AFM Scans Using a Nanofabrication Machine (NFM-100). Proceedings, 56(1), 34. https://doi.org/10.3390/proceedings2020056034