Recognition of Gait Activities Using Acceleration Data from A Smartphone and A Wearable Device †



Abstract
:1. Introduction
2. Related Work
3. Methods
3.1. Setup
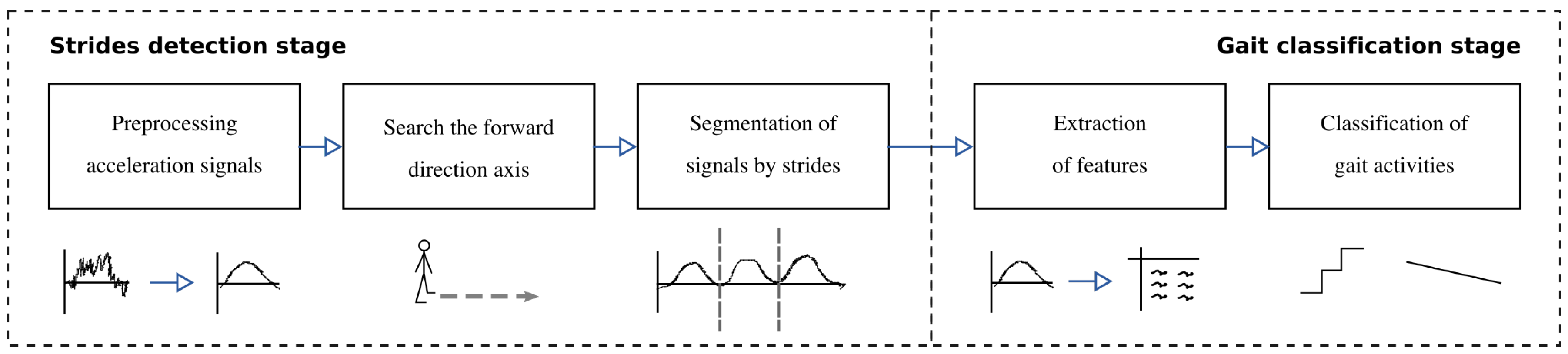
3.2. Strides Detection
| Algorithm 1: Summary of the strides segmentation stage. |
Inputs: : time-series comprising three axes: . a: filter coefficient. w: window size for searching strides. Output: : Array of segmented forward-direction signal. : Array of segmented magnitude-vector of acceleration. Notation: signal representing forward-direction axis-signal. magnitude vector of acceleration. S signal can be , , o . Start Preprocessing acceleration signals: for time-series S ∈ acc do 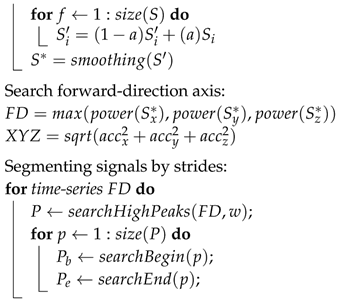 ; ; End |
3.3. Gait Classification
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IMU | Inertial Measurement Unit |
| KNN | K-Nearest Neighbors |
| NB | Naive Bayes |
| SVM | Support Vector Machines |
| TNR | True Negative Rate |
| TPR | True Positive Rate |
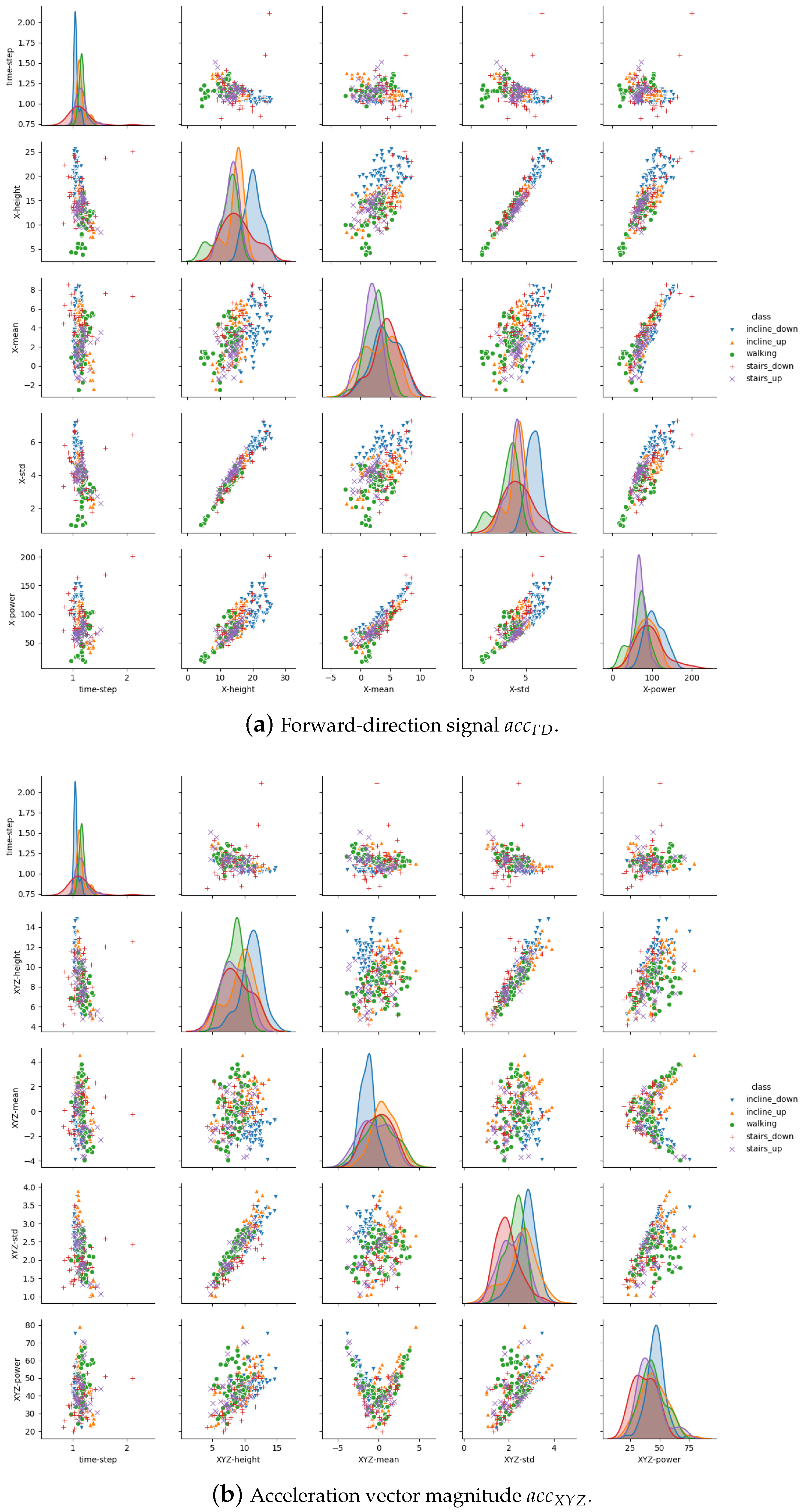
Appendix A. 2D Feature Space

References
- Lawton, M.; Brody, E. Assessment of older people: Self-maintaining and instrumental activities of daily living. Gerontologist 1969, 9, 179–186. [Google Scholar] [CrossRef] [PubMed]
- Katz, S. Assessing self-maintenance: Activities of daily living, mobility, and instrumental activities of daily living. J. Am. Geriatr. Soc. 1983, 31, 721–727. [Google Scholar] [CrossRef] [PubMed]
- Lara, O.D.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Shoaib, M.; Bosch, S.; Incel, O.; Scholten, H.; Havinga, P. A survey of online activity recognition using mobile phones. Sensors 2015, 15, 2059–2085. [Google Scholar] [CrossRef] [PubMed]
- Kirtley, C. Clinical Gait Analysis: Theory and Practice; Elsevier: Philadelphia, PA, USA, 2006. [Google Scholar]
- Haworth, J.M. Gait, aging and dementia. Rev. Clin. Gerontol. 2008, 18, 39–52. [Google Scholar] [CrossRef]
- Howe, C.; Saleh, A.; Mohler, J.; Grewal, G.; Armstrong, D.; Najafi, B. Frailty and Technology: A Systematic Review of Gait Analysis in Those with Frailty. Gerontology 2014, 60, 79–89. [Google Scholar]
- Gupta, J.P.; Singh, N.; Dixit, P.; Semwal, V.B.; Dubey, S.R. Human activity recognition using gait pattern. Int. J. Comput. Vis. Image Process. (IJCVIP) 2013, 3, 31–53. [Google Scholar] [CrossRef]
- Xiong, G.; Cheng, J.; Wu, X.; Chen, Y.L.; Ou, Y.; Xu, Y. An energy model approach to people counting for abnormal crowd behavior detection. Neurocomputing 2012, 83, 121–135. [Google Scholar] [CrossRef]
- Riva, F.; Toebes, M.; Pijnappels, M.; Stagni, R.; Van Dieen, J. Estimating fall risk with inertial sensors using gait stability measures that do not require step detection. Gait Posture 2013, 38, 170–174. [Google Scholar] [CrossRef]
- Everett, T.; Kell, C. Human Movement E-Book: An Introductory Text; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- López-Nava, I.H.; Muñoz-Meléndez, A. Towards ubiquitous acquisition and processing of gait parameters. In Mexican International Conference on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2010; pp. 410–421. [Google Scholar]
- López-Nava, I.; Muñoz-Meléndez, A.; Sanpablo, A.P.; Montero, A.A.; Urióstegui, I.Q.; Carrera, L.N. Estimation of temporal gait parameters using Bayesian models on acceleration signals. Comput. Methods Biomech. Biomed. Eng. 2016, 19, 396–403. [Google Scholar] [CrossRef]
- Aggarwal, J.K.; Xia, L. Human activity recognition from 3d data: A review. Pattern Recognit. Lett. 2014, 48, 70–80. [Google Scholar] [CrossRef]
- Ke, S.R.; Thuc, H.; Lee, Y.J.; Hwang, J.N.; Yoo, J.H.; Choi, K.H. A review on video-based human activity recognition. Computers 2013, 2, 88–131. [Google Scholar] [CrossRef]
- Zolfaghari, S.; Keyvanpour, M.R. SARF: Smart activity recognition framework in Ambient Assisted Living. In Proceedings of the IEEE 2016 Federated Conference on Computer Science and Information Systems (FedCSIS), Gdansk, Poland, 11–14 September 2016; pp. 1435–1443. [Google Scholar]
- Fortino, G.; Gravina, R.; Li, W.; Ma, C. Using Cloud-assisted Body Area Networks to Track People Physical Activity in Mobility. In Proceedings of the 10th EAI International Conference on Body Area Networks (BodyNets ’15), Sydney, New South Wales, Australia, 28–30 September 2015; ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering). pp. 85–91. [Google Scholar]
- Mukhopadhyay, S.C. Wearable sensors for human activity monitoring: A review. IEEE Sensors J. 2014, 15, 1321–1330. [Google Scholar] [CrossRef]
- Lee, S.M.; Yoon, S.M.; Cho, H. Human activity recognition from accelerometer data using Convolutional Neural Network. In Proceedings of the IEEE International Conference on Big Data and Smart Computing (BigComp), Jeju, Korea, 13–16 February 2017; pp. 131–134. [Google Scholar]
- Derawi, M.; Bours, P. Gait and activity recognition using commercial phones. Comput. Secur. 2013, 39, 137–144. [Google Scholar] [CrossRef]
- He, Z.; Jin, L. Activity recognition from acceleration data based on discrete consine transform and SVM. In Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 5041–5044. [Google Scholar]
- Guiry, J.J.; van de Ven, P.; Nelson, J.; Warmerdam, L.; Riper, H. Activity recognition with smartphone support. Med Eng. Phys. 2014, 36, 670–675. [Google Scholar] [CrossRef] [PubMed]
- O’Donovan, K.J.; Kamnik, R.; O’Keeffe, D.T.; Lyons, G.M. An inertial and magnetic sensor based technique for joint angle measurement. J. Biomech. 2007, 40, 2604–2611. [Google Scholar] [CrossRef] [PubMed]
- Tudor-Locke, C.; Aguiar, E.J.; Han, H.; Ducharme, S.W.; Schuna, J.M.; Barreira, T.V.; Moore, C.C.; Busa, M.A.; Lim, J.; Sirard, J.R.; et al. Walking cadence (steps/min) and intensity in 21–40 year olds: CADENCE-adults. Int. J. Behav. Nutr. Phys. Act. 2019, 16, 8. [Google Scholar] [CrossRef]
- Sun, Y.; Wong, A.K.; Kamel, M.S. Classification of imbalanced data: A review. Int. J. Pattern Recognit. Artif. Intell. 2009, 23, 687–719. [Google Scholar] [CrossRef]
- Liu, X.Y.; Wu, J.; Zhou, Z.H. Exploratory undersampling for class-imbalance learning. IEEE Trans. Syst. Man Cybern. Part (Cybernetics) 2009, 39, 539–550. [Google Scholar]
- Friedman, N.; Geiger, D.; Goldszmidt, M. Bayesian network classifiers. Mach. Learn. 1997, 29, 131–163. [Google Scholar] [CrossRef]
- Quinlan, J.R. C4.5: Programs for Machine Learning; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Keller, J.M.; Gray, M.R.; Givens, J.A. A fuzzy k-nearest neighbor algorithm. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 580–585. [Google Scholar] [CrossRef]
- Greven, A.; Keller, G.; Warnecke, G. Entropy; Vol. 47; Princeton University Press, 2014. [Google Scholar]
- Berenguer, A.; Goncalves, J.; Hosio, S.; Ferreira, D.; Anagnostopoulos, T.; Kostakos, V. Are Smartphones Ubiquitous?: An in-depth survey of smartphone adoption by seniors. IEEE Consum. Electron. Mag. 2016, 6, 104–110. [Google Scholar] [CrossRef]
- Caldas, R.; Mundt, M.; Potthast, W.; de Lima Neto, F.B.; Markert, B. A systematic review of gait analysis methods based on inertial sensors and adaptive algorithms. Gait Posture 2017, 57, 204–210. [Google Scholar] [CrossRef] [PubMed]
- Fontecha, J.; Gonzalez, I.; Hervas, R.; Bravo, J. Human gait analysis for frailty detection-quantitative techniques and procedures. In Active and Assisted Living: Technologies and Applications; Healthcare Technologies, Institution of Engineering and Technology: London, UK, 2016; pp. 179–202. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Treatment | Features | NB | C4.5 | SVM | KNN | Avg () |
|---|---|---|---|---|---|---|---|
| Smartphone | 5 | 53.4 | 67.6 | 50.3 | 68.6 | 60.0 (9.5) | |
| 5 | 52.8 | 61.4 | 50.0 | 58.6 | 55.7 (5.2) | ||
| 9 | 61.0 | 63.8 | 61.4 | 79.3 | 66.4 (8.7) | ||
| IMU | 5 | 60.0 | 63.8 | 58.6 | 81.0 | 67.1 (10.3) | |
| 5 | 50.7 | 68.6 | 49.7 | 75.9 | 61.2 (13.1) | ||
| 9 | 59.7 | 68.6 | 63.8 | 85.5 | 69.4 (11.4) |
| Smartphone | IMU | |||
|---|---|---|---|---|
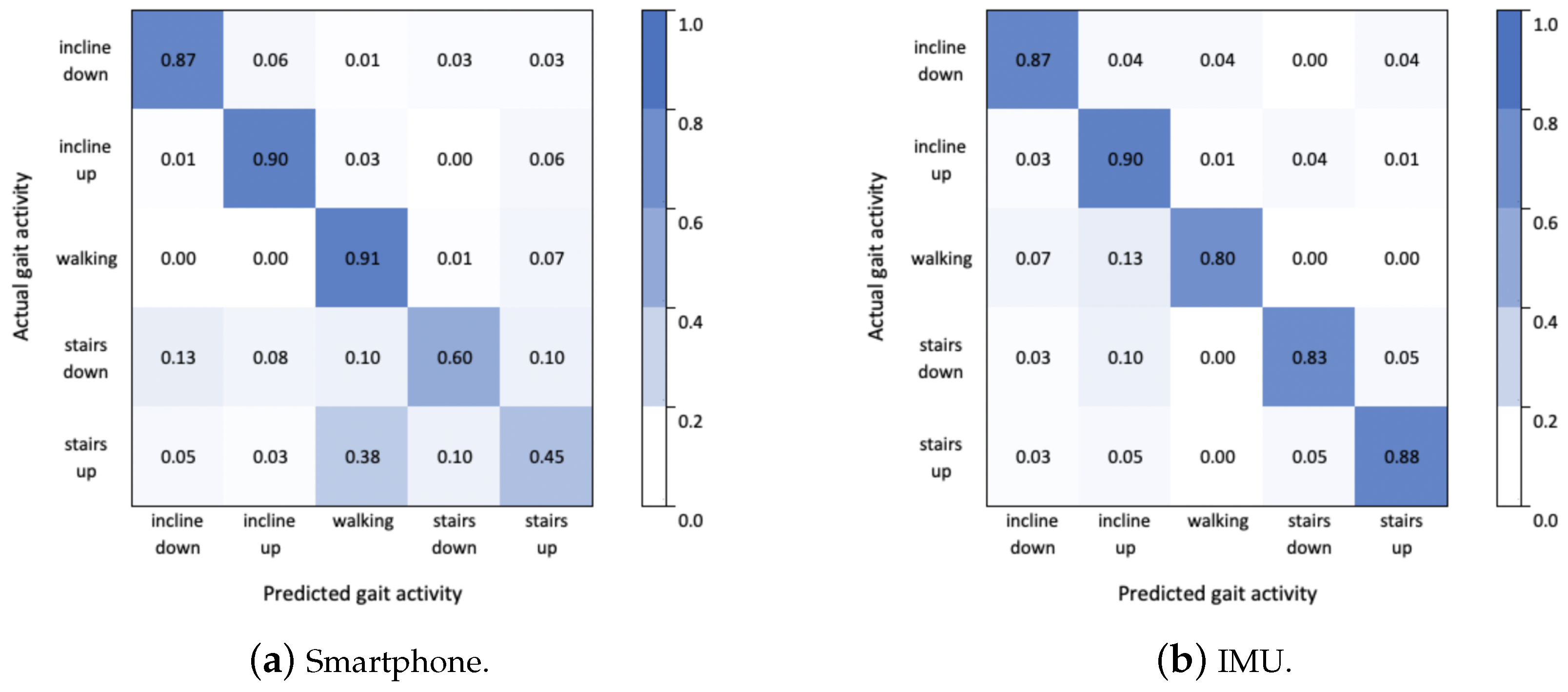
| Gait Activity | TPR | TNR | TPR | TNR |
| Going down an incline | 0.871 | 0.964 | 0.871 | 0.959 |
| Going up an incline | 0.900 | 0.964 | 0.900 | 0.918 |
| Walking on level ground | 0.914 | 0.900 | 0.800 | 0.982 |
| Going down stairs | 0.600 | 0.972 | 0.825 | 0.980 |
| Going up stairs | 0.450 | 0.940 | 0.875 | 0.976 |
| Weighted average | 0.793 | 0.946 | 0.855 | 0.960 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lopez-Nava, I.H.; Garcia-Constantino, M.; Favela, J. Recognition of Gait Activities Using Acceleration Data from A Smartphone and A Wearable Device. Proceedings 2019, 31, 60. https://doi.org/10.3390/proceedings2019031060
Lopez-Nava IH, Garcia-Constantino M, Favela J. Recognition of Gait Activities Using Acceleration Data from A Smartphone and A Wearable Device. Proceedings. 2019; 31(1):60. https://doi.org/10.3390/proceedings2019031060
Chicago/Turabian StyleLopez-Nava, Irvin Hussein, Matias Garcia-Constantino, and Jesus Favela. 2019. "Recognition of Gait Activities Using Acceleration Data from A Smartphone and A Wearable Device" Proceedings 31, no. 1: 60. https://doi.org/10.3390/proceedings2019031060
APA StyleLopez-Nava, I. H., Garcia-Constantino, M., & Favela, J. (2019). Recognition of Gait Activities Using Acceleration Data from A Smartphone and A Wearable Device. Proceedings, 31(1), 60. https://doi.org/10.3390/proceedings2019031060