
Dynamical Behavior Analysis of Generalized Chen–Lee–Liu Equation via the Riemann–Hilbert Approach



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Riemann–Hilbert Problem
2.1. The Lax Pair of gCLL Equation
2.2. Spectral Analysis
3. Inverse Scattering Transform
4. Soliton Solutions
4.1. N-Soliton Solutions
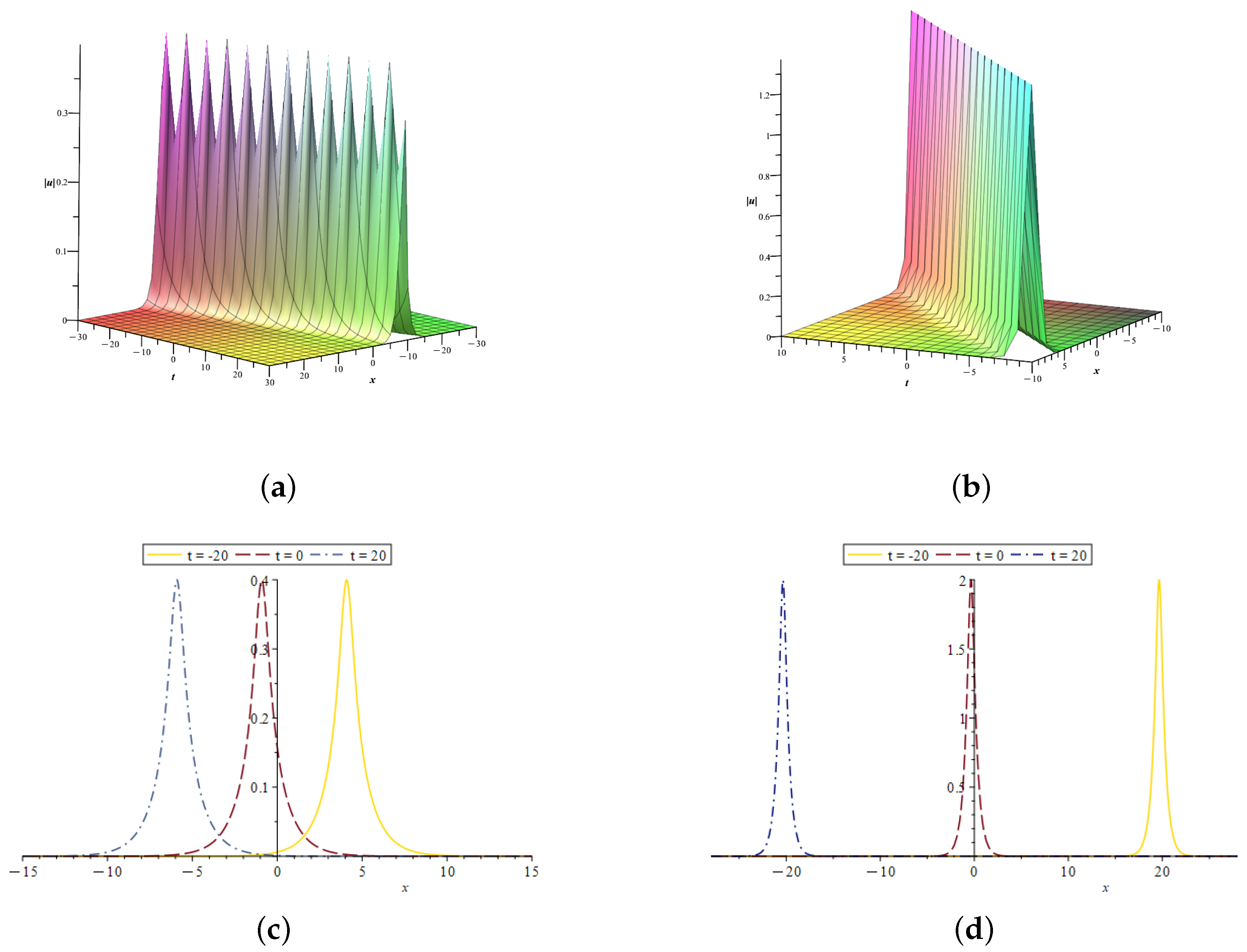
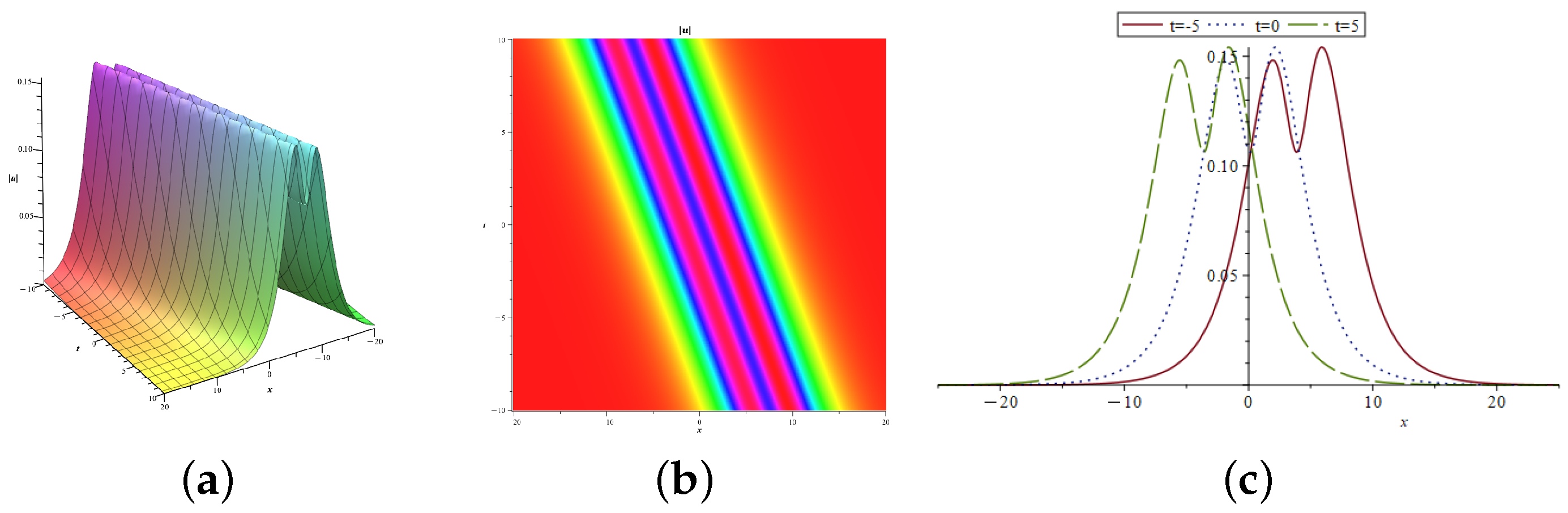
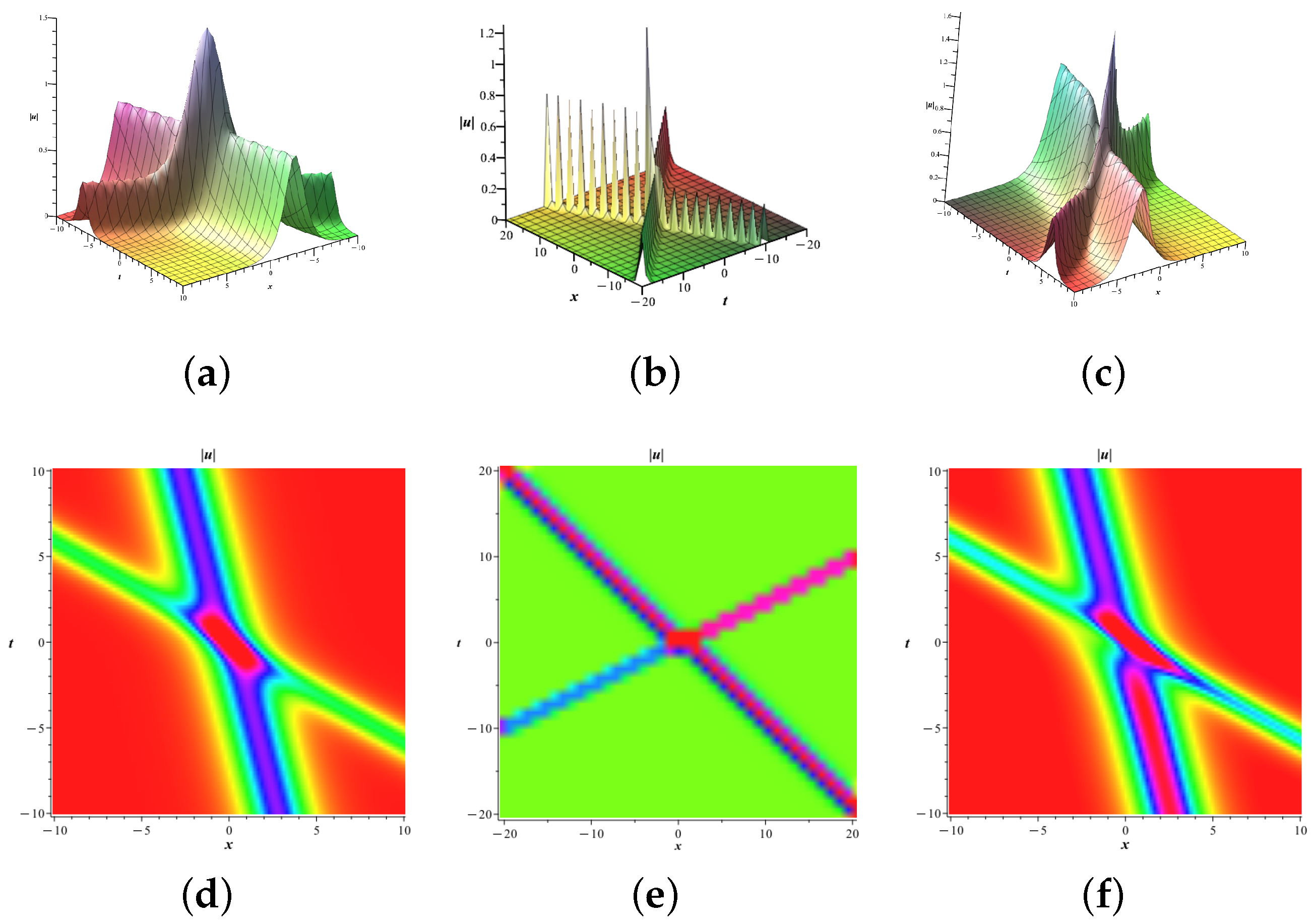
4.2. Single-Soliton Solutions
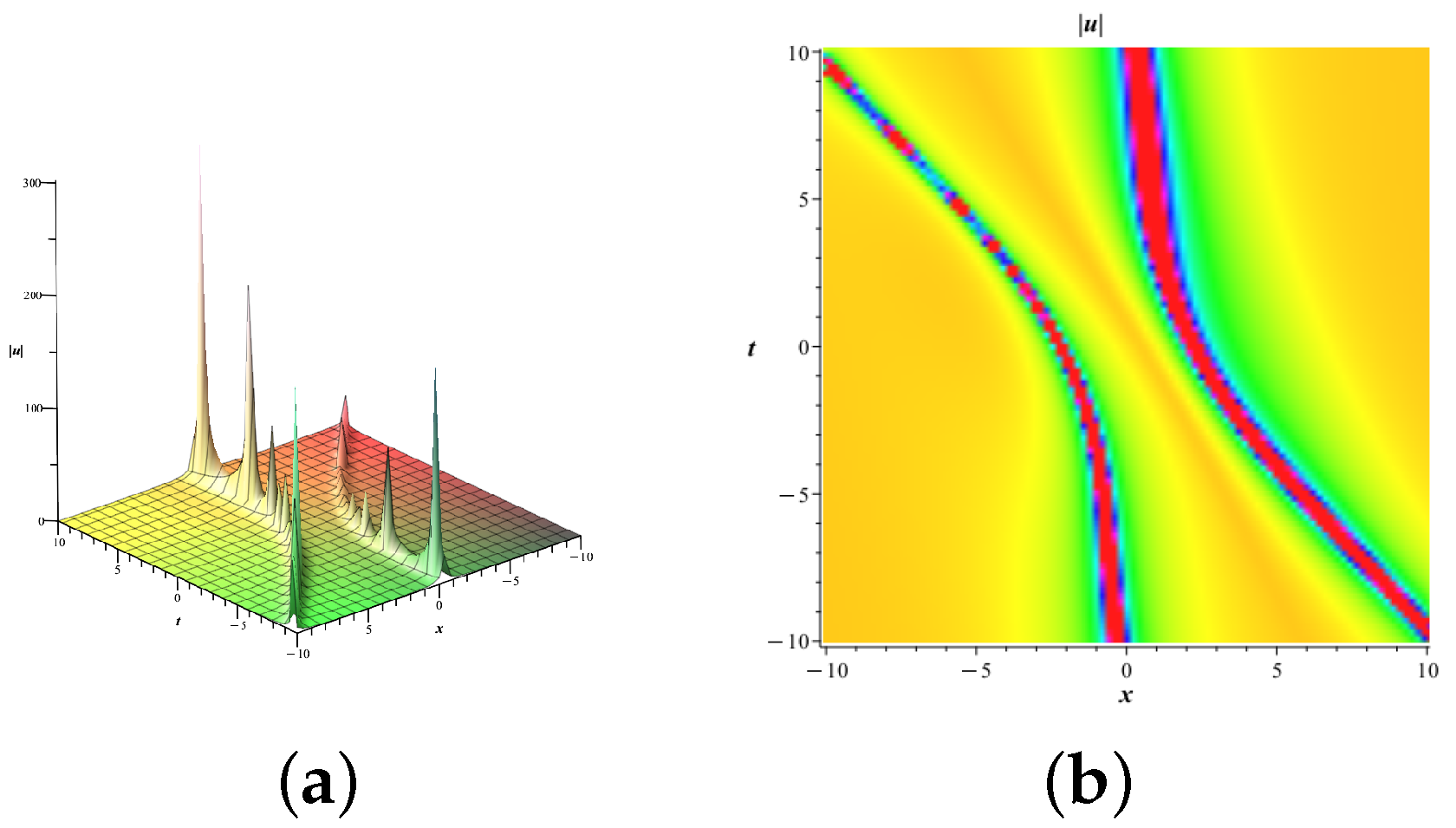
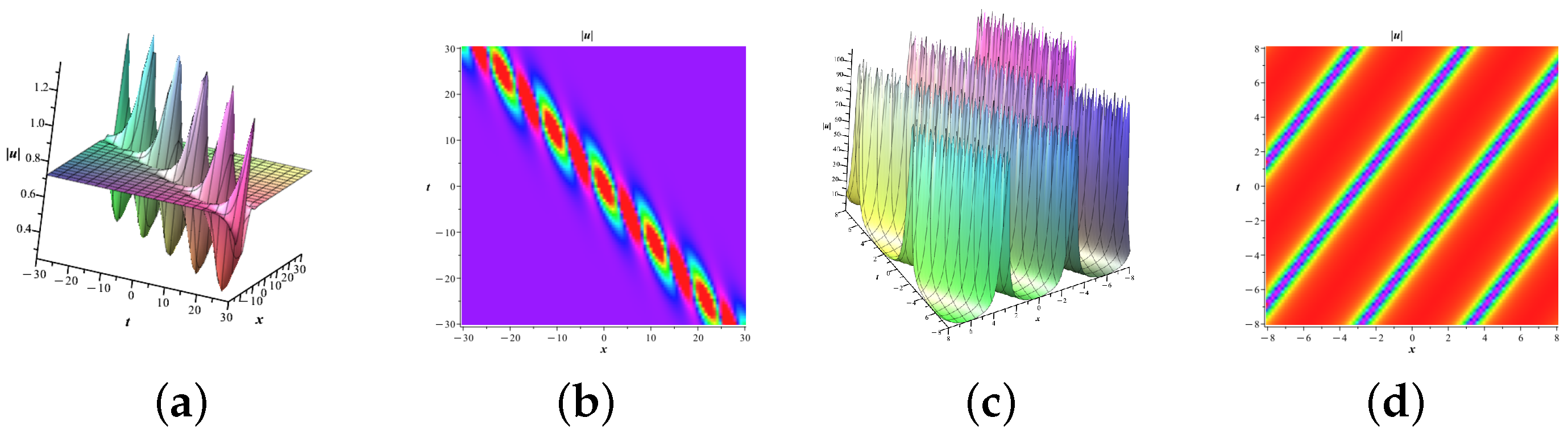
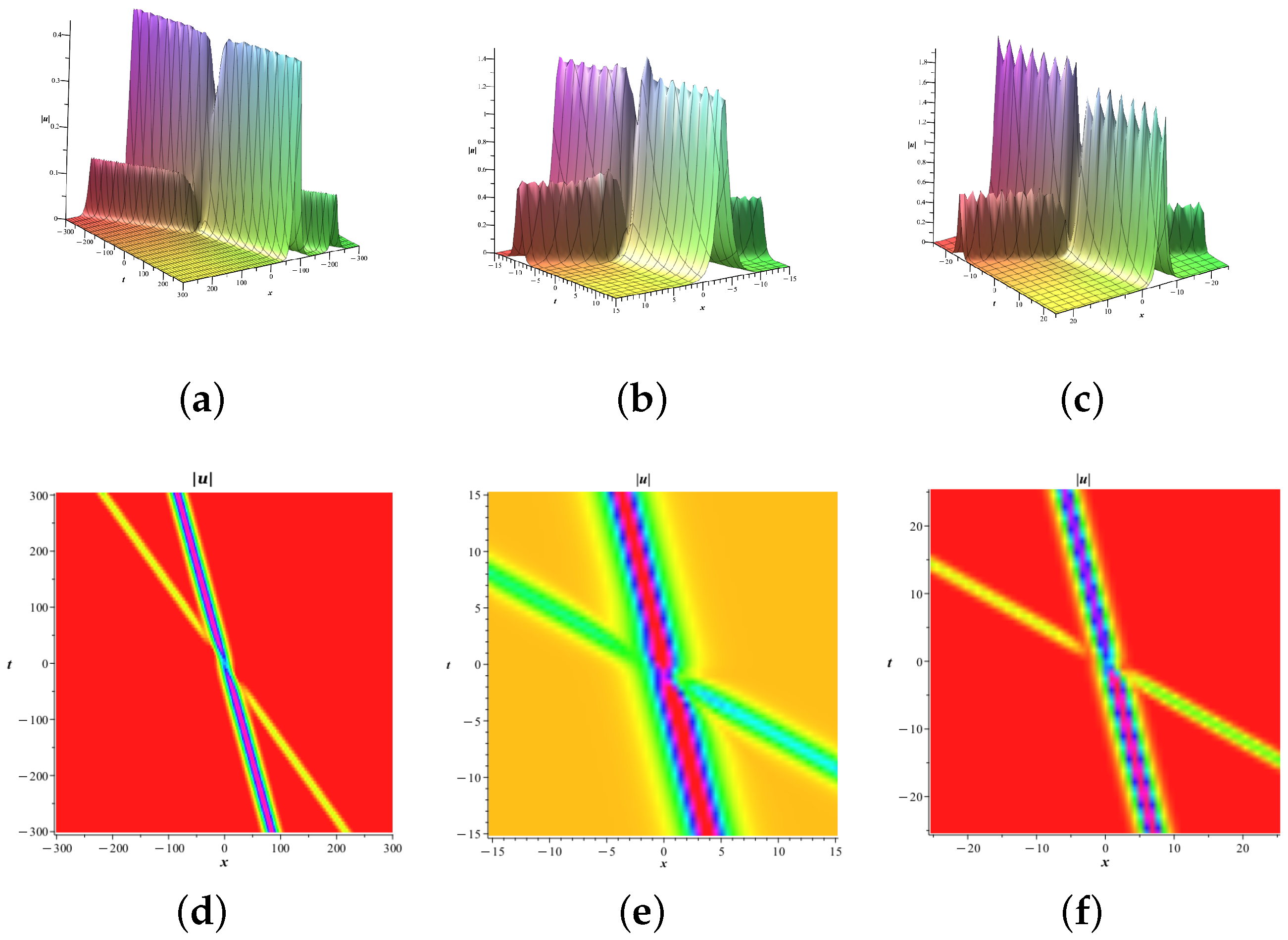
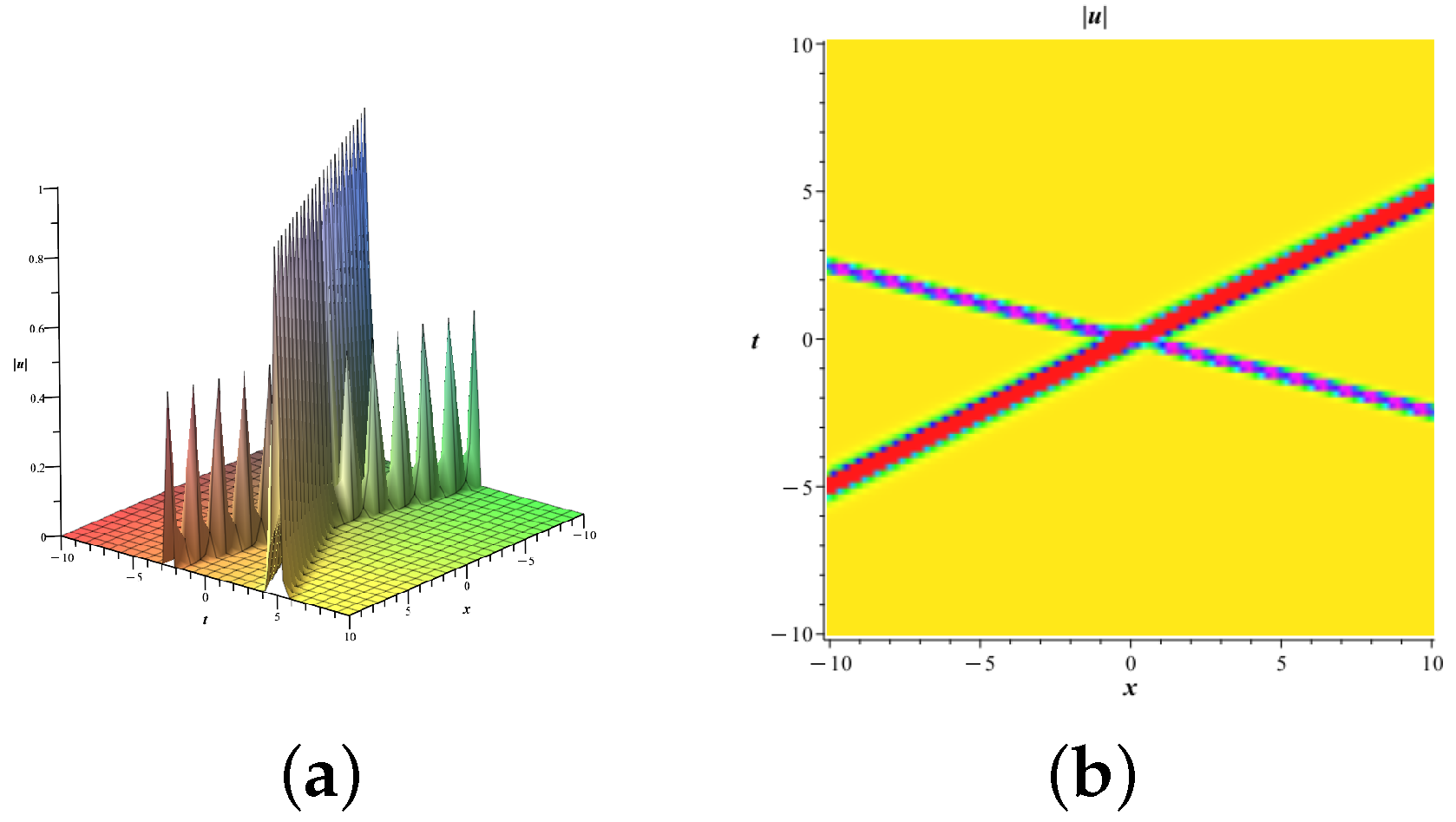
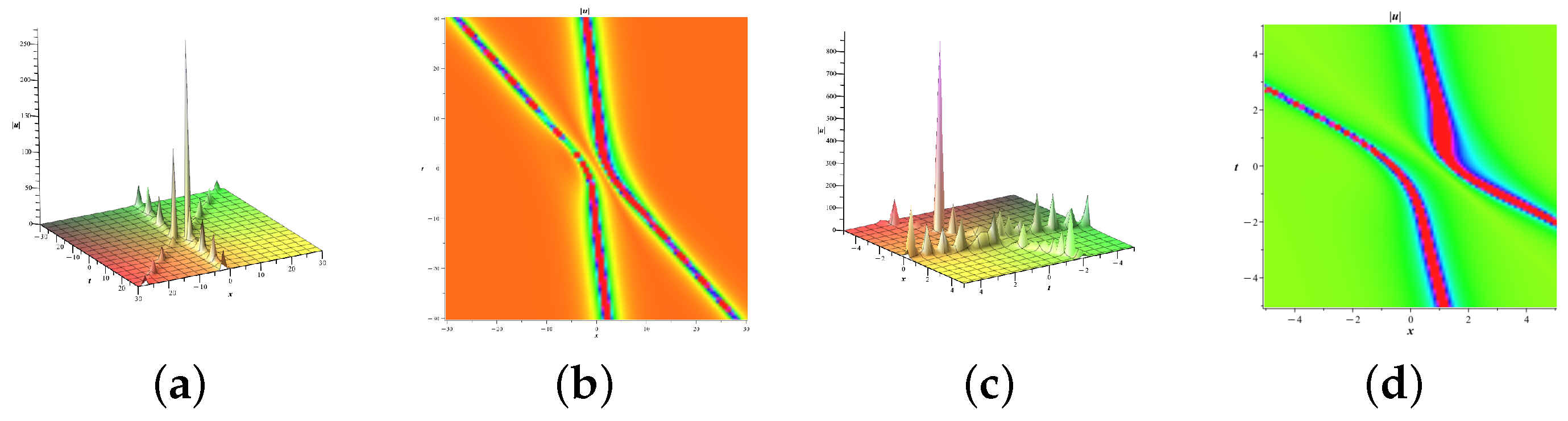
4.3. Double-Soliton Solutions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, H.; Lee, Y.; Liu, C. Integrability of nonlinear Hamiltonian systems by inverse scattering method. Phys. Scr. 1979, 20, 490. [Google Scholar] [CrossRef]
- Fan, E. Integrable systems of derivative nonlinear Schrödinger type and their multi-Hamiltonian structure. J. Phys. A Math. Gen. 2001, 34, 513. [Google Scholar] [CrossRef]
- Triki, H.; Babatin, M.; Biswas, A. Chirped bright solitons for Chen–Lee–Liu equation in optical fibers and PCF. Optik 2017, 149, 300–303. [Google Scholar] [CrossRef]
- Newell, A.C. The general structure of integrable evolution equations. Proc. R. Soc. Lond. A Math. Phys. Sci. 1979, 365, 283–311. [Google Scholar]
- Kawata, T.; Kobayashi, N.; Inoue, H. Soliton solutions of the derivative nonlinear Schrödinger equation. J. Phys. Soc. Jpn. 1979, 46, 1008–1015. [Google Scholar] [CrossRef]
- Fan, E. Darboux transformation and soliton-like solutions for the Gerdjikov-Ivanov equation. J. Phys. A Math. Gen. 2000, 33, 6925. [Google Scholar] [CrossRef]
- Xu, M.J.; Xia, T.C.; Hu, B.B. Riemann–Hilbert approach and N-soliton solutions for the Chen–Lee–Liu equation. Mod. Phys. Lett. B 2019, 33, 1950002. [Google Scholar] [CrossRef]
- Han, S.H.; Park, Q.H. Effect of self-steepening on optical solitons in a continuous wave background. Phys. Rev. E—Stat. Nonlinear Soft Matter Phys. 2011, 83, 066601. [Google Scholar] [CrossRef]
- Paliathanasis, A. Periodic solutions from Lie symmetries for the generalized Chen–Lee–Liu equation. Eur. Phys. J. Plus 2021, 136, 934. [Google Scholar] [CrossRef]
- Rogers, C.; Chow, K. Localized pulses for the quintic derivative nonlinear Schrödinger equation on a continuous-wave background. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2012, 86, 037601. [Google Scholar] [CrossRef]
- Ivanov, S.K. Riemann problem for the light pulses in optical fibers for the generalized Chen-Lee-Liu equation. Phys. Rev. A 2020, 101, 053827. [Google Scholar] [CrossRef]
- Forest, M.; Rosenberg, C.J.; Wright, O. On the exact solution for smooth pulses of the defocusing nonlinear Schrödinger modulation equations prior to breaking. Nonlinearity 2009, 22, 2287. [Google Scholar] [CrossRef]
- González-Gaxiola, O.; Biswas, A. W-shaped optical solitons of Chen–Lee–Liu equation by Laplace–Adomian decomposition method. Opt. Quantum Electron. 2018, 50, 314. [Google Scholar] [CrossRef]
- Liu, N.; Sun, J.; Yu, J.D. Inverse scattering and soliton dynamics for the mixed Chen–Lee–Liu derivative nonlinear Schrödinger equation. Appl. Math. Lett. 2024, 152, 109029. [Google Scholar] [CrossRef]
- Zhang, N.; Xia, T.c.; Fan, E.g. A Riemann-Hilbert approach to the Chen-Lee-Liu equation on the half line. Acta Math. Appl. Sin. Engl. Ser. 2018, 34, 493–515. [Google Scholar] [CrossRef]
- Ozdemir, N.; Esen, H.; Secer, A.; Bayram, M.; Yusuf, A.; Sulaiman, T.A. Optical soliton solutions to Chen Lee Liu model by the modified extended tanh expansion scheme. Optik 2021, 245, 167643. [Google Scholar] [CrossRef]
- Yıldırım, Y. Optical solitons to Chen–Lee–Liu model in birefringent fibers with trial equation approach. Optik 2019, 183, 881–886. [Google Scholar] [CrossRef]
- Bansal, A.; Biswas, A.; Zhou, Q.; Arshed, S.; Alzahrani, A.K.; Belic, M.R. Optical solitons with Chen–Lee–Liu equation by Lie symmetry. Phys. Lett. A 2020, 384, 126202. [Google Scholar] [CrossRef]
- Gomez, C.A.; Rezazadeh, H.; Inc, M.; Akinyemi, L.; Nazari, F. The generalized Chen-Lee-Liu model with higher order nonlinearity: Optical solitons. Opt. Quantum Electron. 2022, 54, 492. [Google Scholar] [CrossRef]
- Scott, A.C.; Chu, F.Y.; McLaughlin, D.W. The soliton: A new concept in applied science. Proc. IEEE 1973, 61, 1443–1483. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Cambridge University Press: Cambridge, UK, 2004; p. 155. [Google Scholar]
- Gu, C. Soliton Theory and Its Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Ablowitz, M.J.; Segur, H. Solitons and the Inverse Scattering Transform; SIAM: Bangkok, Thailand, 1981. [Google Scholar]
- Wazwaz, A.M. Multiple-soliton solutions for the KP equation by Hirota’s bilinear method and by the tanh–coth method. Appl. Math. Comput. 2007, 190, 633–640. [Google Scholar] [CrossRef]
- Gu, C.; Hu, H.; Zhou, Z. Darboux Transformations in Integrable Systems: Theory and Their Applications to Geometry; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Rogers, C.; Schief, W.K. Bäcklund and Darboux Transformations: Geometry and Modern Applications in Soliton Theory; Cambridge University Press: Cambridge, UK, 2002; Volume 30. [Google Scholar]
- Aygar, Y.; Bairamov, E. Jost solution and the spectral properties of the matrix-valued difference operators. Appl. Math. Comput. 2012, 218, 9676–9681. [Google Scholar] [CrossRef]
- Miller, R.K. Volterra integral equations in a Banach space. Funkcial. Ekvac 1975, 18, 163–193. [Google Scholar]
- Zhang, Y.; Cheng, Y.; He, J. Riemann—Hilbert method and N—soliton for two—component Gerdjikov-Ivanov equation. J. Nonlinear Math. Phys. 2017, 24, 210–223. [Google Scholar] [CrossRef]
- Lenells, J.; Fokas, A. An integrable generalization of the nonlinear Schrödinger equation on the half-line and solitons. Inverse Probl. 2009, 25, 115006. [Google Scholar] [CrossRef]
- Guo, B.; Ling, L. Riemann-Hilbert approach and N-soliton formula for coupled derivative Schrödinger equation. J. Math. Phys. 2012, 53, 073506. [Google Scholar] [CrossRef]
- Fokas, A.S. Two–dimensional linear partial differential equations in a convex polygon. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2001, 457, 371–393. [Google Scholar] [CrossRef]
- Shchesnovich, V.S.; Yang, J. General soliton matrices in the Riemann–Hilbert problem for integrable nonlinear equations. J. Math. Phys. 2003, 44, 4604–4639. [Google Scholar] [CrossRef]
- Faddeev, L.D.; Takhtajan, L.A. Hamiltonian Methods in the Theory of Solitons; Springer: Berlin/Heidelberg, Germany, 1987; Volume 23. [Google Scholar]
- Wang, D.S.; Ma, Y.Q.; Li, X.G. Prolongation structures and matter-wave solitons in F = 1 spinor Bose–Einstein condensate with time-dependent atomic scattering lengths in an expulsive harmonic potential. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3556–3569. [Google Scholar] [CrossRef]
- Geng, X.; Wu, J. Riemann–Hilbert approach and N-soliton solutions for a generalized Sasa–Satsuma equation. Wave Motion 2016, 60, 62–72. [Google Scholar] [CrossRef]
- Boutet de Monvel, A.; Shepelsky, D.; Zielinski, L. The short pulse equation by a Riemann–Hilbert approach. Lett. Math. Phys. 2017, 107, 1345–1373. [Google Scholar] [CrossRef]
- Kang, Z.Z.; Xia, T.C.; Ma, X. Multi-soliton solutions for the coupled modified nonlinear Schrödinger equations via Riemann–Hilbert approach. Chin. Phys. B 2018, 27, 070201. [Google Scholar] [CrossRef]
- Ma, W.X. Riemann–Hilbert problems and N-soliton solutions for a coupled mKdV system. J. Geom. Phys. 2018, 132, 45–54. [Google Scholar] [CrossRef]
- Zhuang, Y.; Zhang, Y.; Zhang, H.; Xia, P. Multi-soliton solutions for the three types of nonlocal Hirota equations via Riemann–Hilbert approach. Commun. Theor. Phys. 2022, 74, 115004. [Google Scholar] [CrossRef]
- Lin, Y.; Dong, H.; Fang, Y. N-Soliton Solutions for the NLS-Like Equation and Perturbation Theory Based on the Riemann–Hilbert Problem. Symmetry 2019, 11, 826. [Google Scholar] [CrossRef]
- Qiu, D. Riemann-Hilbert approach and N-soliton solution for the Chen-Lee-Liu equation. Eur. Phys. J. Plus 2021, 136, 825. [Google Scholar] [CrossRef]
- Matveev, V.B.; Salle, M.A. Darboux Transformations and Solitons; Springer Series in Nonlinear Dynamics; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Lenells, J. Dressing for a novel integrable generalization of the nonlinear Schrödinger equation. J. Nonlinear Sci. 2010, 20, 709–722. [Google Scholar] [CrossRef]
- Liu, W.J.; Tian, B.; Zhang, H.Q.; Li, L.L.; Xue, Y.S. Soliton interaction in the higher-order nonlinear Schrödinger equation investigated with Hirota’s bilinear method. Phys. Rev. E—Stat. Nonlinear Soft Matter Phys. 2008, 77, 066605. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Zhang, C.; Tian, L. Dynamical Behavior Analysis of Generalized Chen–Lee–Liu Equation via the Riemann–Hilbert Approach. Fractal Fract. 2025, 9, 282. https://doi.org/10.3390/fractalfract9050282
Chen W, Zhang C, Tian L. Dynamical Behavior Analysis of Generalized Chen–Lee–Liu Equation via the Riemann–Hilbert Approach. Fractal and Fractional. 2025; 9(5):282. https://doi.org/10.3390/fractalfract9050282
Chicago/Turabian StyleChen, Wenxia, Chaosheng Zhang, and Lixin Tian. 2025. "Dynamical Behavior Analysis of Generalized Chen–Lee–Liu Equation via the Riemann–Hilbert Approach" Fractal and Fractional 9, no. 5: 282. https://doi.org/10.3390/fractalfract9050282
APA StyleChen, W., Zhang, C., & Tian, L. (2025). Dynamical Behavior Analysis of Generalized Chen–Lee–Liu Equation via the Riemann–Hilbert Approach. Fractal and Fractional, 9(5), 282. https://doi.org/10.3390/fractalfract9050282