1. Introduction
This paper extends the classical Lyapunov stability theory to mixed fractional order direct model reference adaptive control (FO-DMRAC), providing a theoretical foundation for analyzing the stability of fractional order dynamic systems. The principal aim of this paper is to demonstrate that, for such systems, the control error approaches zero as time tends to infinity, leveraging the classical Lyapunov stability approach.
This work prioritizes establishing that the control error converges to zero, even if the Lyapunov method () conditions are not met for all The analysis shows that this convergence holds as long as the difference between the plant output and the reference model output approaches zero as .
Numerous methods applied to fractional adaptive systems rely on fractional Lyapunov functions [
1,
2], resulting in analyses that primarily ensure the stability of the mean square of the control error [
3,
4,
5,
6,
7]. For instance, the approach presented in [
4] develops a specialized fractional Lyapunov function tailored for fractional order dynamic systems. Similarly, the works of [
5] and [
6] propose the use of fractional Lyapunov derivatives to address an adaptive class of fractional systems, but those methods do not use the classical or integer Lyapunov approach. Additionally, other noteworthy approaches include the utilization of fractional gradients for control applications [
8,
9,
10,
11,
12,
13,
14,
15] and adaptive laws based on the MIT rule [
8,
9,
10]. However, these approaches often lack rigorous stability analysis, and the proposed fractional Lyapunov functions tend to be quite complex.
For this reason, this work seeks to perform a stability analysis using a classical Lyapunov function but applied to a fractional controller, thus decreasing the analysis’s complexity level. To conduct this analysis, we utilized the adaptive error model 3, which operates without access to the system’s states. This approach adds complexity and generality to the analysis while simultaneously ensuring that the control error converges to zero [
1,
2]. It is worth mentioning that fractional calculus could be used in the case of Lyapunov exponent problems if we change the classical derivative to a fractional one [
16].
This paper is structured as follows:
Section 2 presents the classical integer order implementation of direct model reference adaptive control (IO-DMRAC). In
Section 3, we explore fundamental concepts and key results from fractional calculus, which serve as the foundation for analyzing the stability of FO-DMRAC systems.
Section 4 addresses the challenges associated with proving the convergence of the control error
to zero and introduces the proposed methodology for establishing this convergence.
Section 5 showcases the simulation results across various examples that illustrate both the convergence of the control error to zero and the behavior of the function
Lastly,
Section 6 summarizes the conclusions.
2. Control Model System
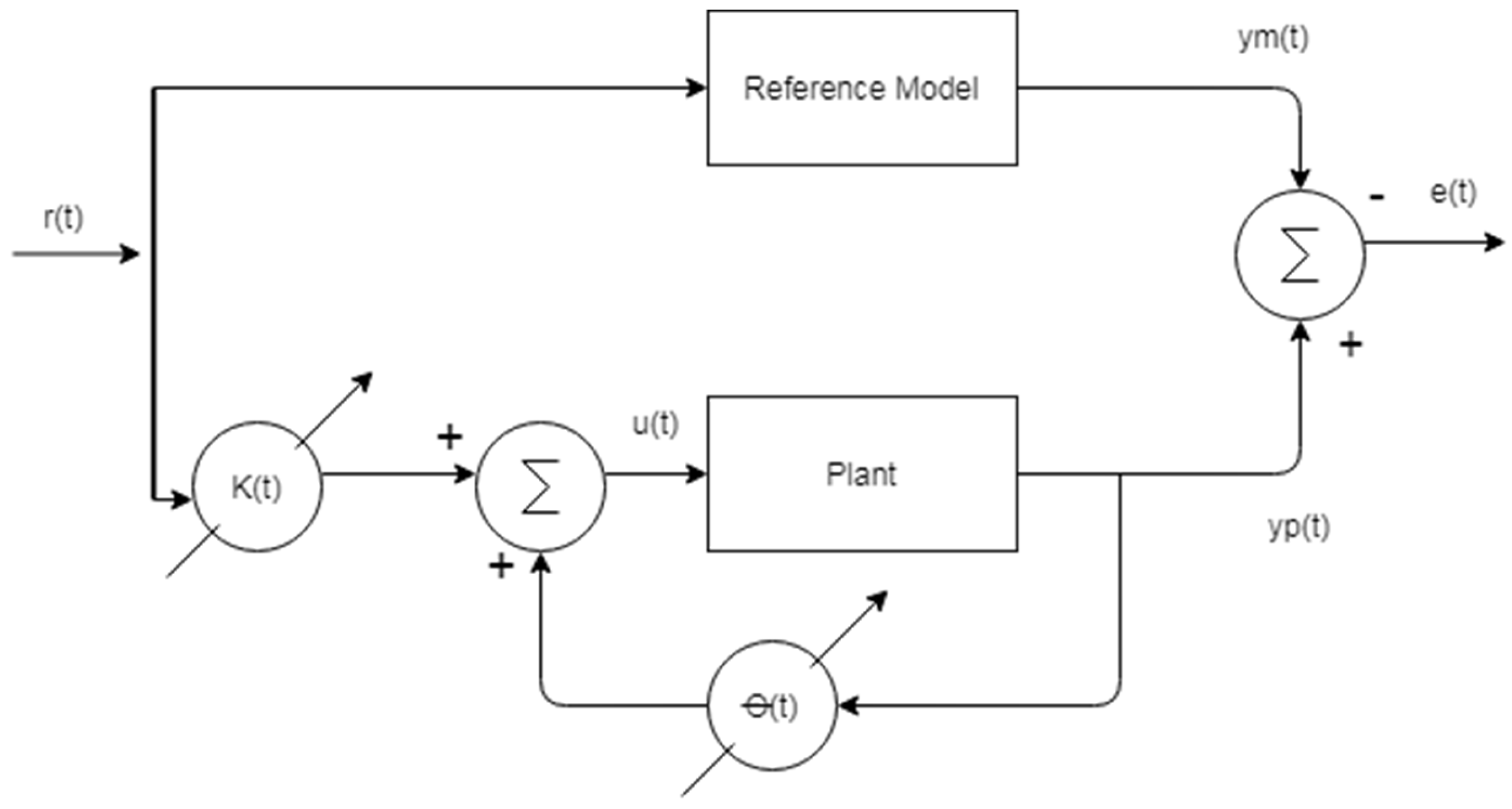
Figure 1 shows a simplified block diagram for the classical integer order direct model reference adaptive control (DMRAC), in which control parameters
and
are adjusted using their corresponding adaptive laws to keep the control error as small as possible.
DMRAC Algorithm
The objective of the DMRAC is to minimize the control error
This approach simplifies implementation by eliminating the need for an identification block, as asymptotic convergence of the controller parameters to their ideal values is not required, making parameter adjustments less critical [
17].
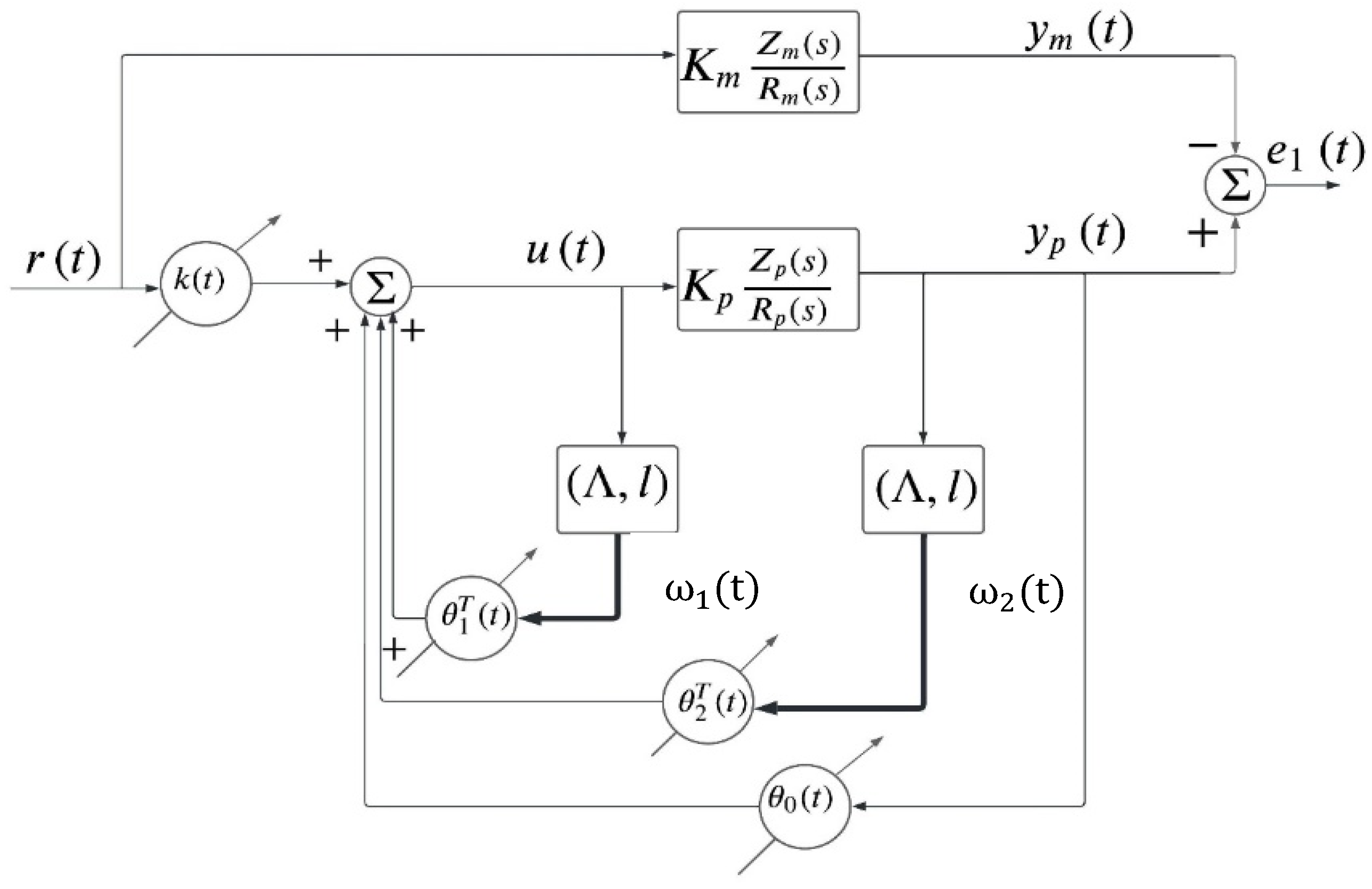
In
Figure 2, a detail DMRAC adaptive control scheme of a linear (or linearized)
nth order plant, with relative degree 1
, is shown. In this scheme, only the control error
is accessible (error model 3), while the full state error vector
is not. This limitation simplifies the analysis of the stability conditions [
17]. Next, we show the differences between error models 2 and 3, respectively.
Model error 2:
. In this case, the whole sate error vector is accessible, including the output or control error , which is one element of the state vector.
. In this case, we only have access to the output of the system or control error .
The control law has the following form
where and
are the controller parameters and the auxiliary signals, respectively, and is the order of the plant.
The parameters error vector controller is as follows:
with
the ideal controller parameters.
The auxiliary signals are defined by the following:
with
,
and
is any arbitrary stable and controllable pair with
, a Hurwitz matrix.
For simplicity, we choose
in the controllable canonical form. Furthermore, when
, the control parameters for the classical or integer order adaptive laws (IO-DMRAC) can be chosen as follows:
and the output control error
can be expressed as
, where
is a strictly positive real (SPR) transfer function.
On the other hand, for the fractional order adaptive laws (FO-DMRAC) case, these adaptive laws can be written as
where
is a fractional derivative term.
3. Fractional Calculus Preliminaries
In this section, we present some definitions and the main advances in the stability of fractional order model reference adaptive control systems.
3.1. Basic Concepts of Fractional Calculus
The basic definitions of fractional derivative and integral most used in engineering are presented in [
18,
19], which will be useful for implementing the FO-DMRAC.
Definition 1 ([
19])
. The Riemann–Liouville fractional integral of order of a function
is defined bywhere
is the Gamma function defined as Definition 2 ([
19])
. Let and
. The Caputo fractional derivative of order
of a function
is defined as Some additional lemmas and a theorem are important for the stability analysis of fractional order adaptive control systems. In what follows, we will mention these and reference their proofs.
Lemma 1 (Principle of fractional comparison)
. Let
be a vector of differentiable functions. Then, the following inequality holds [
1,
2]
.where is a symmetric square matrix of constant coefficients and positive definite. Proof of this Lemma can be found in [
2]
. 3.2. Principal Advances in Stability of Fractional Order Systems
Theorem 1. Let the state error
and the control error
be represented by equations (model error 3)where is a Hurwitz matrix, such that there is a given matrix . Then, there exists a matrix
, such thatwhose adaptive adjustment laws to estimate the unknown controller parameters are given bywhere
is the gain of the plant, which is unknown, but the sign is known. Also,
and . Then, if and are differentiable and uniformly continuous functions, it holds that - (a)
The parametric error the state error and the control error remain bounded for all time.
- (b)
Furthermore, if the auxiliary signal is bounded, then and also remain bounded.
- (c)
The mean value of the squared norm of the state error is , or equivalently
where
means that the speed of converges to zero is higher than
The proof of this theorem can be found in [
3].
Remark 1. This theorem applies to systems whose relative degree
is greater than one as long as the model transfer function is strictly positive real. Otherwise, it is necessary to modify
to meet this condition.
From Theorem 1, since with is a constant vector, then the control error will also be .
If (c) holds, it must also hold for the mean value of the square norm of since with a vector whose components are constants.
There is a lemma that relaxes hypothesis (b) imposed from Theorem 1 when
(i.e., the error model equation is of integer order); therefore, all the internal signals
are bounded, and there is no need to impose the boundedness condition over
. The proof of this lemma can be found in [
20].
Furthermore, as the auxiliary signal
is bounded and Theorem 1 guarantees (c), the squared norm of the control error
also tends to 0 as t tends to infinity. That is
Therefore, the stability of the proposed FO-DMRAC is guaranteed.
Nevertheless, it is impossible to conclude the convergence of the errors ( and ) to 0 as t tends to . Also, it is still a pending issue to prove the analytical differentiability of .
The high-frequency gain of the plant is supposed to be unknown, but its sign is assumed to be known (.
4. Some Issues That Difficult to Prove Convergence of Errors to 0 in Adaptive Fractional Order Systems
In the well-known classical (or integer order) DMRAC, the proof of the convergence of the state error and the control error (
and
, respectively) to 0 rests on the Barbalat Lemma. That is, the derivative of the Lyapunov function
Then, using the Barbalat Lemma, we can conclude that the state error tends to 0 (
); therefore, the control error
also tends to 0 (
) [
17].
Nevertheless, even though it is not explicitly mentioned in the literature, because of the above, it must also be satisfied that .
In the mixed fractional order direct model reference adaptive control (FO-MRAC), there is no equivalent Barbalat Lemma like in the integer order case. Therefore, it is not possible to conclude the convergence of the state error and the control error to 0.
If we write the Lyapunov function for the mixed adaptive system, we have (considering, from
Figure 3,
for simplicity)
therefore,
As we can see, it is not easy to know the sign of the second term
or the term
with
. To make the notation easier, we can make the variable change
; therefore,
. Then, (11) could be rewritten as
By Lemma 2 [
20], we know that
is boundness. By part (a) of Theorem 1,
is boundness; therefore,
(when
tends to infinity) by Caputo derivative properties. Moreover, as
is boundness by the same theorem, (12) is a boundedness term.
Still, we cannot prove that the term
Remark 2. If the signals are of the PE type (Persisting Excitation type) class of an adequate order, could converge to 0, but this is more related to the case of identification problems [
17,
21]
. In the direct model reference adaptive control (DMRAC) case, it is not necessarily . Even in this case, we can only show that , but it is not enough to conclude that or , and thus that with Q as a constant and symmetric matrix.
Therefore, we must explore what happens with the term inside the parenthesis. That is, the term .
First, we know that all the signals inside the parenthesis are bounded; then,
because as we showed before, by Caputo derivative properties [
18,
19],
, as t tends to
, because the term
will be at least constant. Then, as
is a bounded signal, if
, then
and
; therefore,
will prove the convergence to 0 of all errors (state error
and control error
). But we assume that
, which is not possible to establish a priori.
It is important to mention that several fractional adaptive systems present this behavior. That is,
and
. In the Simulation Results Section (
Section 5), we will show some examples that show this behavior for both stable and unstable systems.
Now, from (7), as is arbitrary, as long as , we can choose ; therefore, (7) can be rewritten as
which gives a term that is divided by Even more, as part (a) of Theorem 1, is bounded, and by part (b) of the same theorem, is bounded and is part of (5); all the other terms ( and ) are bounded. Therefore, the numerator of (5) can be infinite or constant (if is square integrable), and then we can use the L’Hôpital rule, that is, if and 1 are continuous and differentiable functions, then
If
then
which has been proved in [
3].
That is to say, as the L’Hôpital’s rule states, if .
Therefore, as because with a vector of constants elements, this means that the control error tends to 0 conform t tends to Therefore, we have proven the convergence of the state and control error to 0, which is a new result for fractional order direct model reference adaptive control systems (FO-DMRAC). Also, this result means that , as in the integer order case.
5. Simulation Results
In this section, we will show some examples (of different relative degree plants) that support what has been developed and concluded in
Section 4. The simulations were performed using Matlab–Simulink [
22,
23,
24]. For all examples, zero initial conditions were considered.
For simplicity of the analysis but without loss of generality, is considered. Then, as was said before (9), a typical Lyapunov function can be chosen, such as . Therefore,
If
then the above term can be rewritten as
Unlike the classic case, in (13), a term with a fractional derivative appears. For doing the simulation analysis, the designer can choose any , such as . In this case, we will choose but any combination of values of and could be chosen as long as .
In the mixed FO-DMRAC case, where the error model dynamic is of integer order and the adaptive laws are fractional (see Equation (1)), the dynamic of the state error
considering the plant together with the controller (error model 3) [
17], is
where
and
, and
, where .
Although, from a theoretical point of view, it is not necessary to calculate the value of from since it is enough that the conditions of the Meyer–Kalman–Yakubovich (MKY) lemma are met, it is important for the purposes of carrying out the calculation of .
Next, we present some examples to show the behavior of the control error and the derivative of the Lyapunov function that confirm the convergence to zero of , which is the main result of this paper, and this was proven in the previous section.
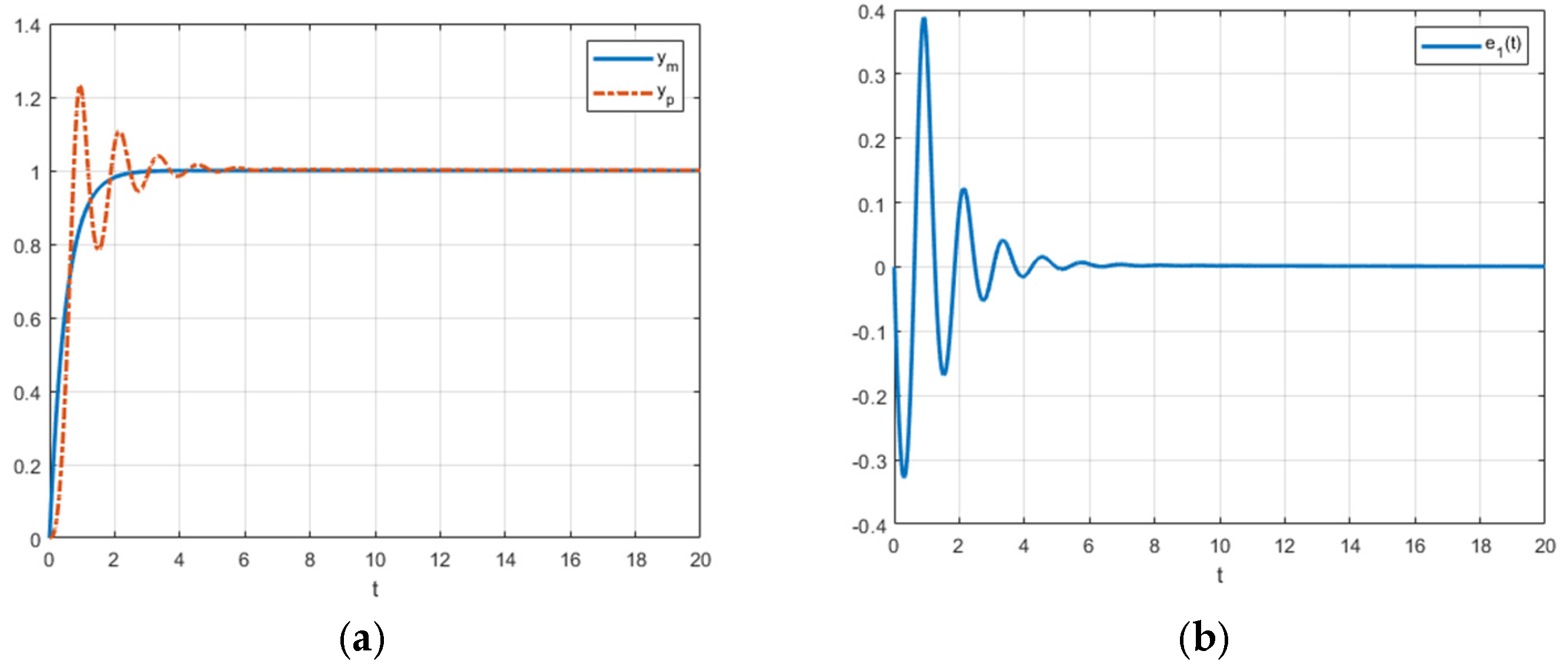
5.1. Scalar Stable Plant
Example 1. (and
).
Remark 3. In the scalar case,
and
, where
and
are the ideal control parameters and
is the control law.
Then, using the MKY lemma, that is, for any
a
exists, such that
we may calculate
, and
for the system of Example 1 and thus be able to calculate
.
In this example,
,
,
, and
. In
Table 1 the differential equations and values of Example 1 are shown.
The fractional adaptive laws were implemented using the Ninteger Toolbox [
23]. Specifically, the NID block was used based on the Oustaloup method [
24].
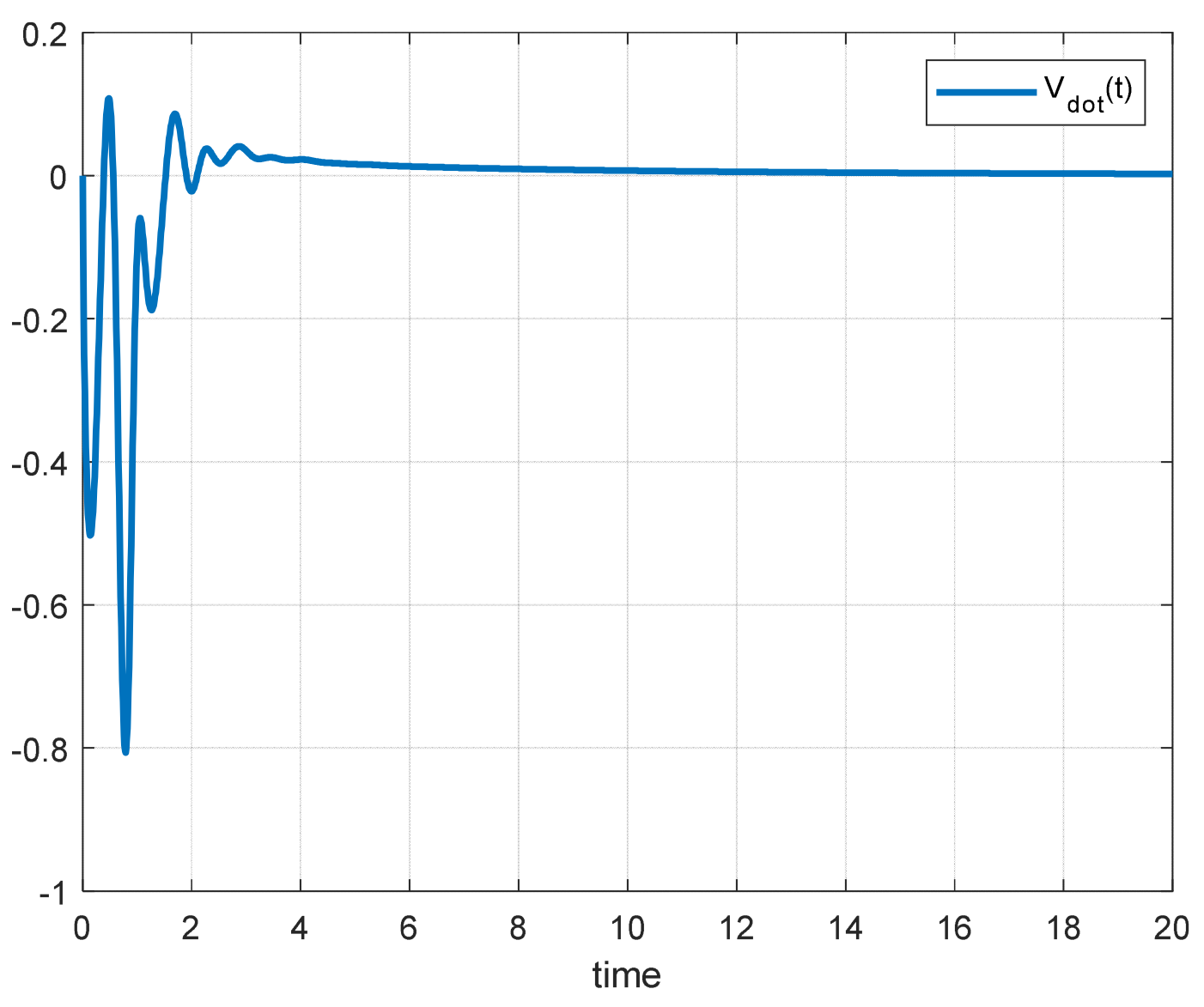
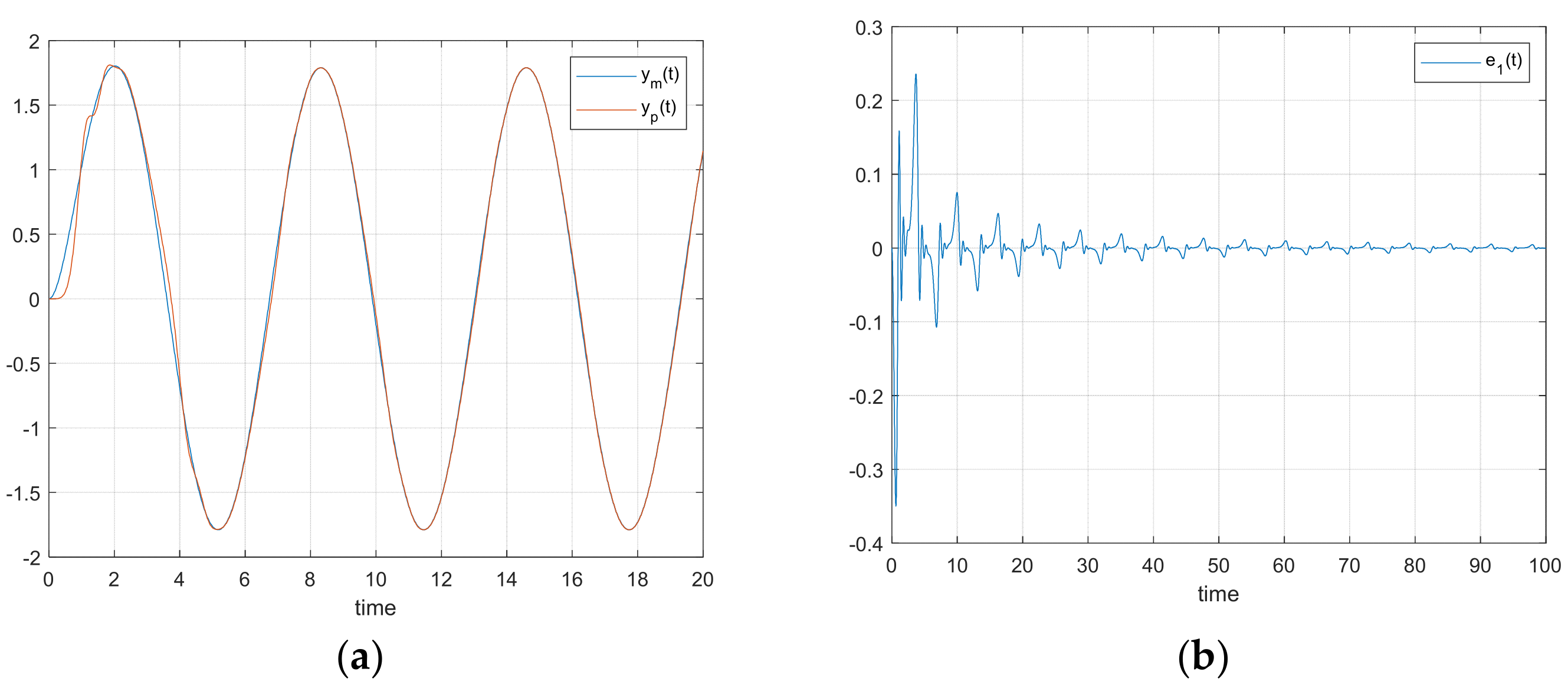
Figure 3 shows the plant response
, reference output
, and control error
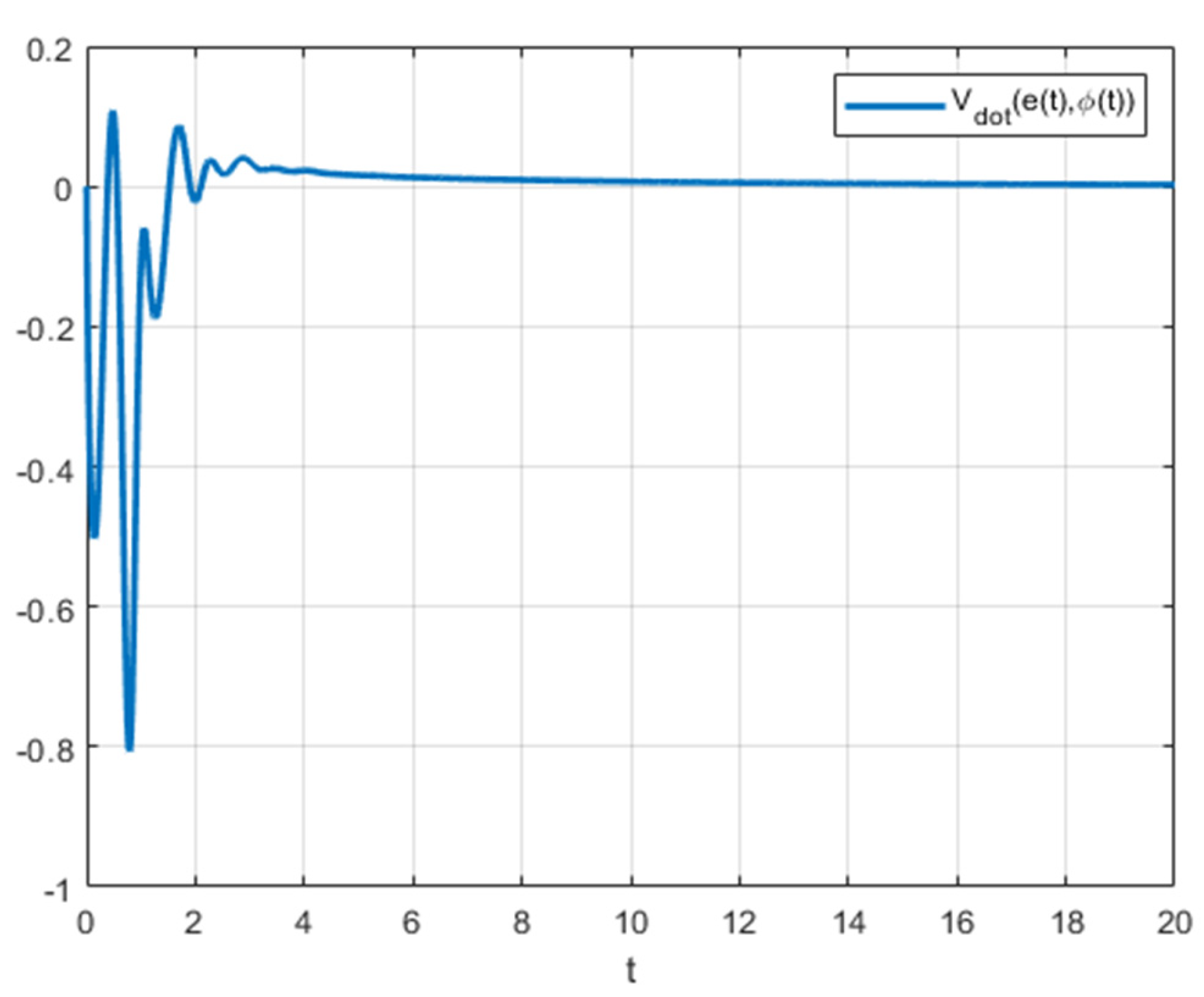
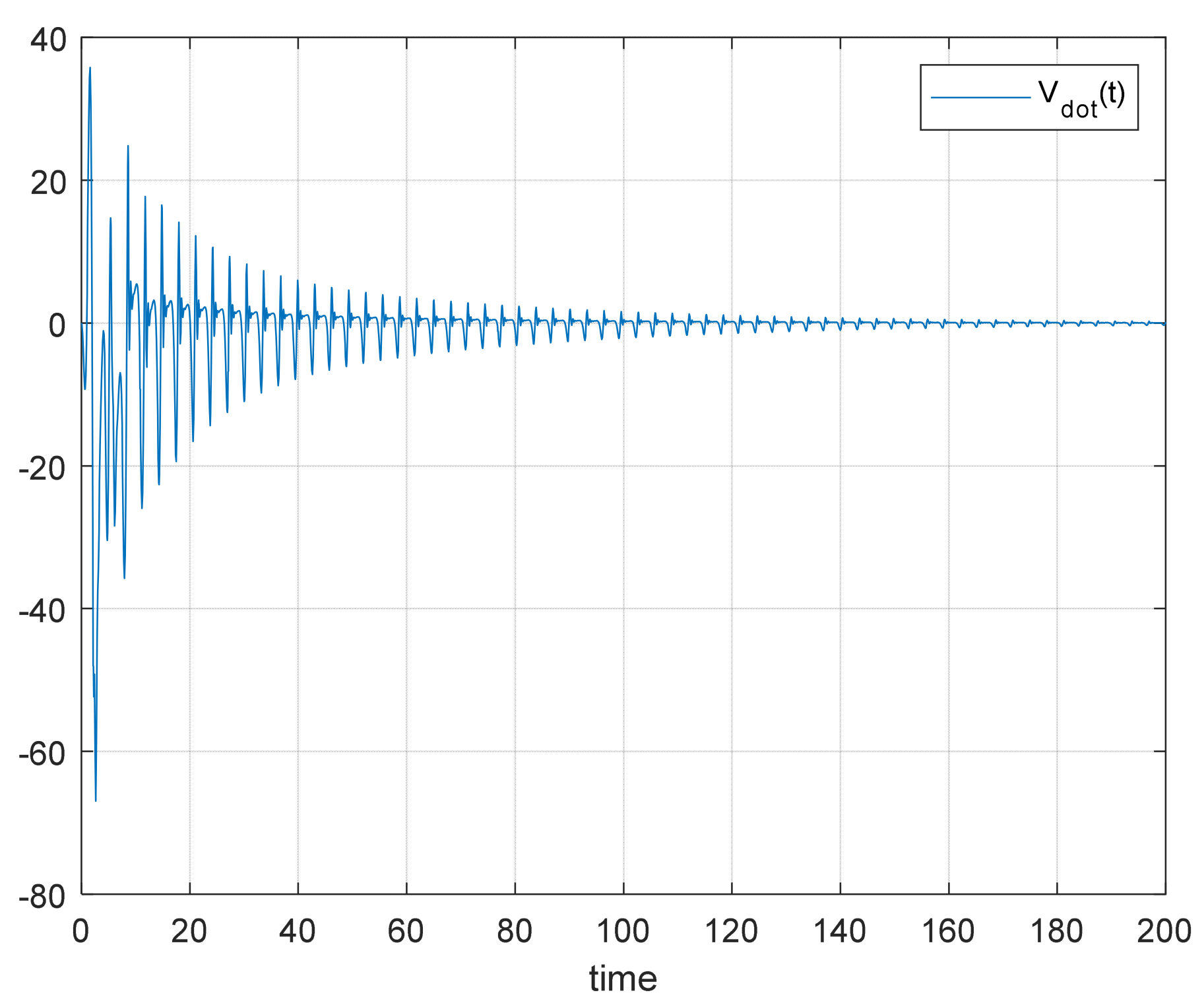
, respectively. From
Figure 4, we can see the evolution of
, respectively.
Additionally, as shown in
Figure 3 and
Figure 4, the control error
converges to zero, and while
may be greater than zero in certain time intervals, it ultimately converges to zero as
, like the classical case.
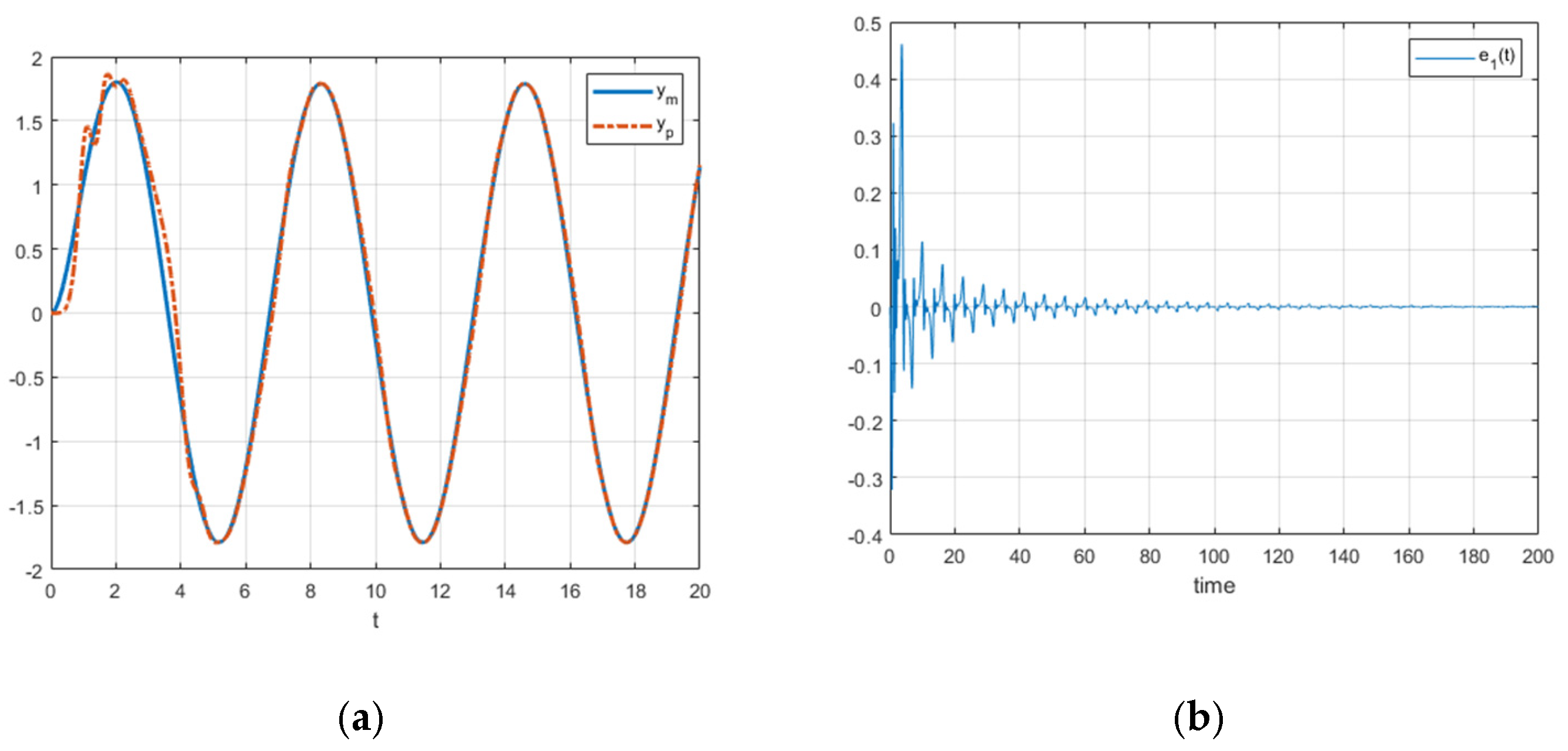
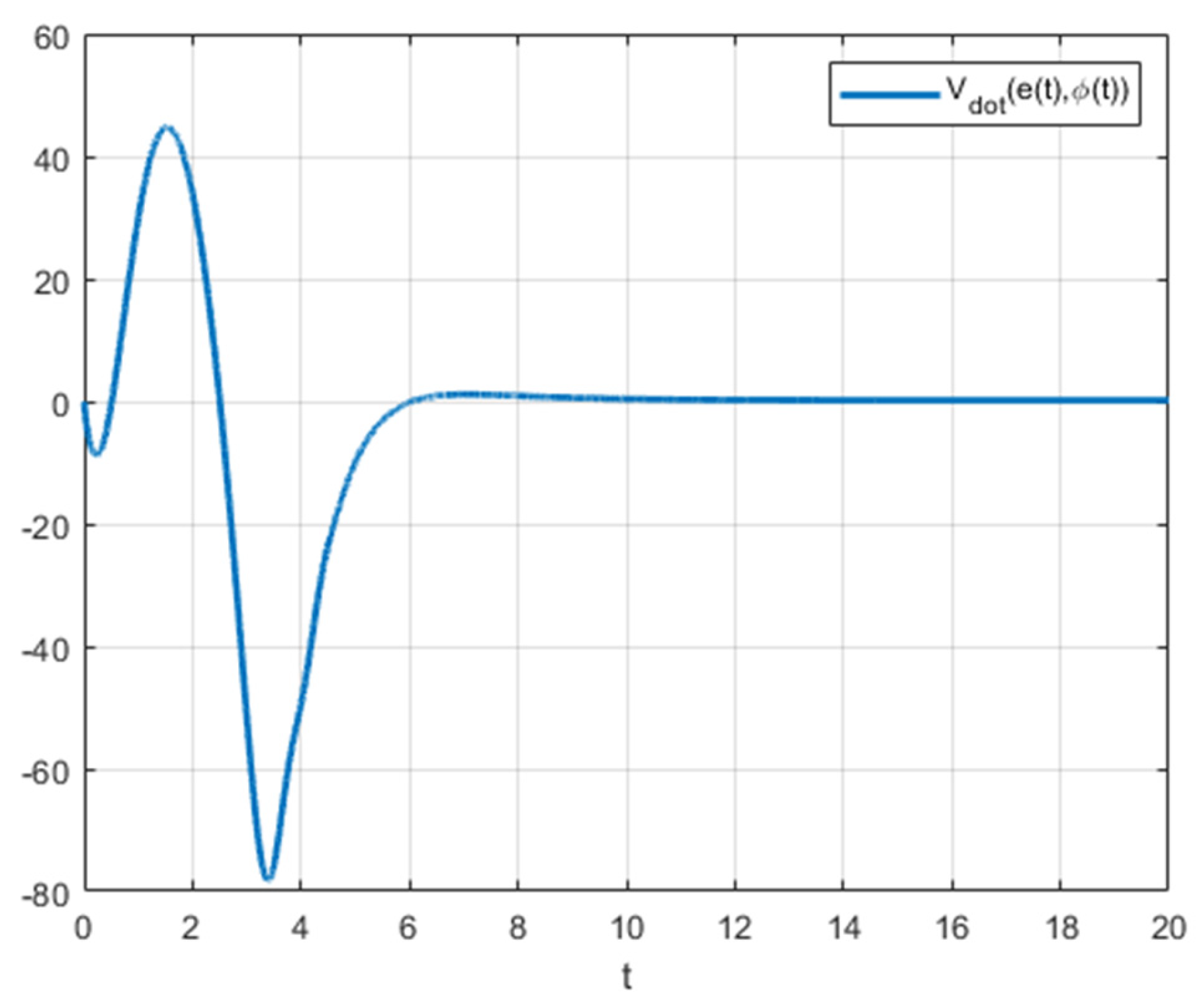
If we change
by a sinusoidal signal such as
, the response, control error, and the graph of
are shown in
Figure 5 and
Figure 6, respectively.
From
Figure 5, the control error
convergence takes more time than the stable case, but the convergence is assured anyway. A similar convergence behavior can be seen from
Figure 6.
5.2. Scalar Unstable Plant
Example 2. (and
).
,
,
and
.
Table 2 shows the differential equations and values of Example 2.
The next figures (
Figure 7 and
Figure 8) show similar convergence behavior as the graphics of Example 1 for the unstable plant.
Now, if we change the reference to
, the figures are as follows (
Figure 9 and
Figure 10).
As we can see, from
Figure 10 and
Figure 11, both the control error
and
converge to 0, even if
can take positive values in some time intervals.
5.3. Vectorial Case (Stable Plant)
Example 3. (and).
Table 3 shows the differential equations and values of Example 3.
Remark 4. The reference model transfer function
has been changed (order 2) just to match the conditions for finding the control ideal parameters
, but the behavior is the same as the original transfer function
.
Note: and
Internal auxiliary signals:
Fractional order adaptive laws:
Remark 5. is a diagonal matrix where
. For practical implementation simplicity, we choose
(identity matrix of appropriated dimension).
are the parameters error vector controllers and
are the ideal controller parameters.
Finally,
whose eigenvalues are −1, −2, −1, and −1; therefore, is Hurwitz. Also, if
, which is a symmetrical and positive defined matrix, then
, which is also a symmetrical and positive defined matrix that satisfies the MKY Lemma. That is
As before,
Figure 11 and
Figure 12 show the response, control error
and
behavior, respectively.
Figure 11 shows similar behavior as Examples 1 and 2; that is, the plant output
converges to the model reference output
, which is equivalent to saying that the control error tends to 0 as
. Also, from
Figure 12, we confirm that
, even if in some time intervals (mainly in the transient period),
can be positive.
Now, by changing the reference signal to a sinusoidal one as in the previous example, that is,
, we obtain the following dynamic behavior, which is shown in the next figures (
Figure 13 and
Figure 14 respectively).
Remark 6. These simulations are made to show that
(the control error converges to 0) in the case of fractional order model reference adaptive control implementation (FO-DMRAC) and not to show the performance of the controllers. Better performance can be achieved by using an optimization algorithm such as PSO [
25]
or another one in such a way as to choose the fractional parameters and adaptive gains
more conveniently. Finally, new conditions of the Lyapunov method can be established and applied to FO-DMRAC. That is, let be a continuous and derivable function, then
.
.
If , then, , which implies that the control error also converges to 0.
6. Conclusions
In this article, we have proven that in the FO-DMRAC case, the control error converges to 0 even if the derivative of the Lyapunov function is greater than 0 in some time intervals (mainly in the transient periods). Some examples have been presented to show the convergence of the control error and the behavior of the function as approaches infinity.
One of the main difficulties in carrying out the synthesis of , for simulation purposes, is that we need to compute the ideal control parameters analytically and the matrix Q explicitly, which is not an easy task when the order of the plant to control grows in order. One practical approach to determine the ideal controller parameters is to implement the controller system using a Persistent Excitation (PE) reference input signal and wait for convergence. Sometimes, it could take a long time, depending on the system order, because the higher the order, the more parameters we must compute.
In conclusion, the convergence of the state error and the control error to zero has been demonstrated for a class of fractional adaptive control systems (FO-DMRAC) using the classical Lyapunov approach, avoiding additional complexities in the analysis. Previously, it had only been established that the mean square errors converge to zero as time approaches infinity; however, the convergence of errors themselves had not been explicitly demonstrated until now.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}