



Fractional-Order Modeling and Identification for an SCR Denitrification Process


Abstract
1. Introduction
- (1)
- A fractional-order plus time delay modeling with a parameter identification approach for experimental step response data from an industrial power plant SCR denitrification process is proposed;
- (2)
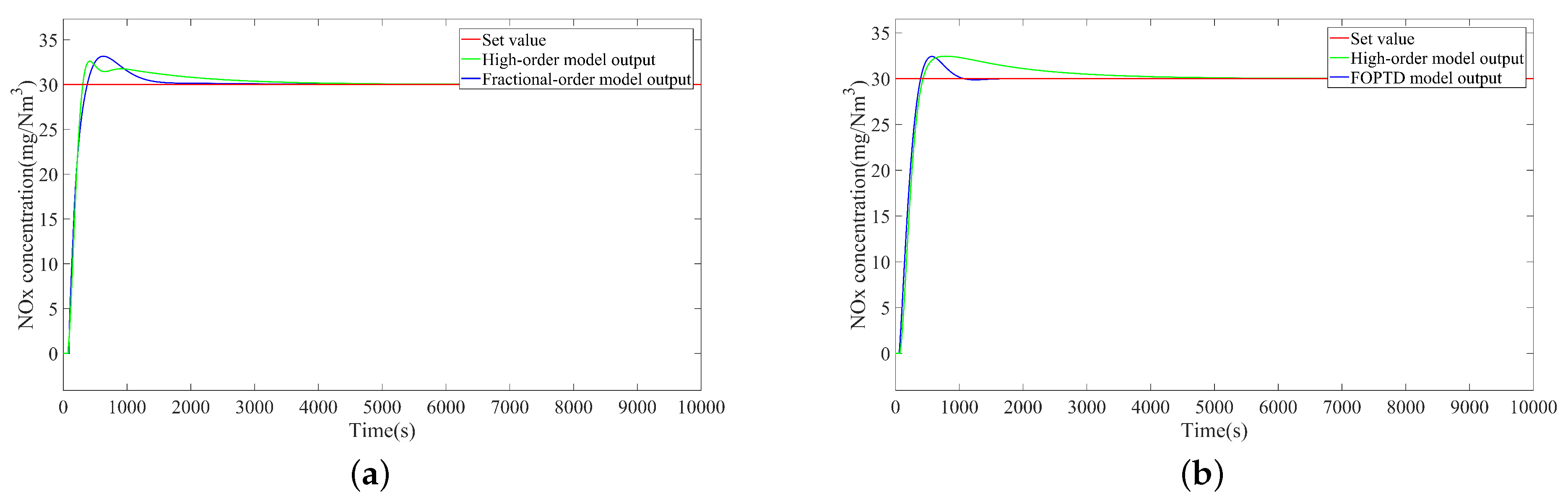
- Closed-loop control illustration using the PI controllers designed for the traditional integer-order models and the fractional-order one is conducted to show the advantages of the proposed fractional-order model with the corresponding system identification approach.
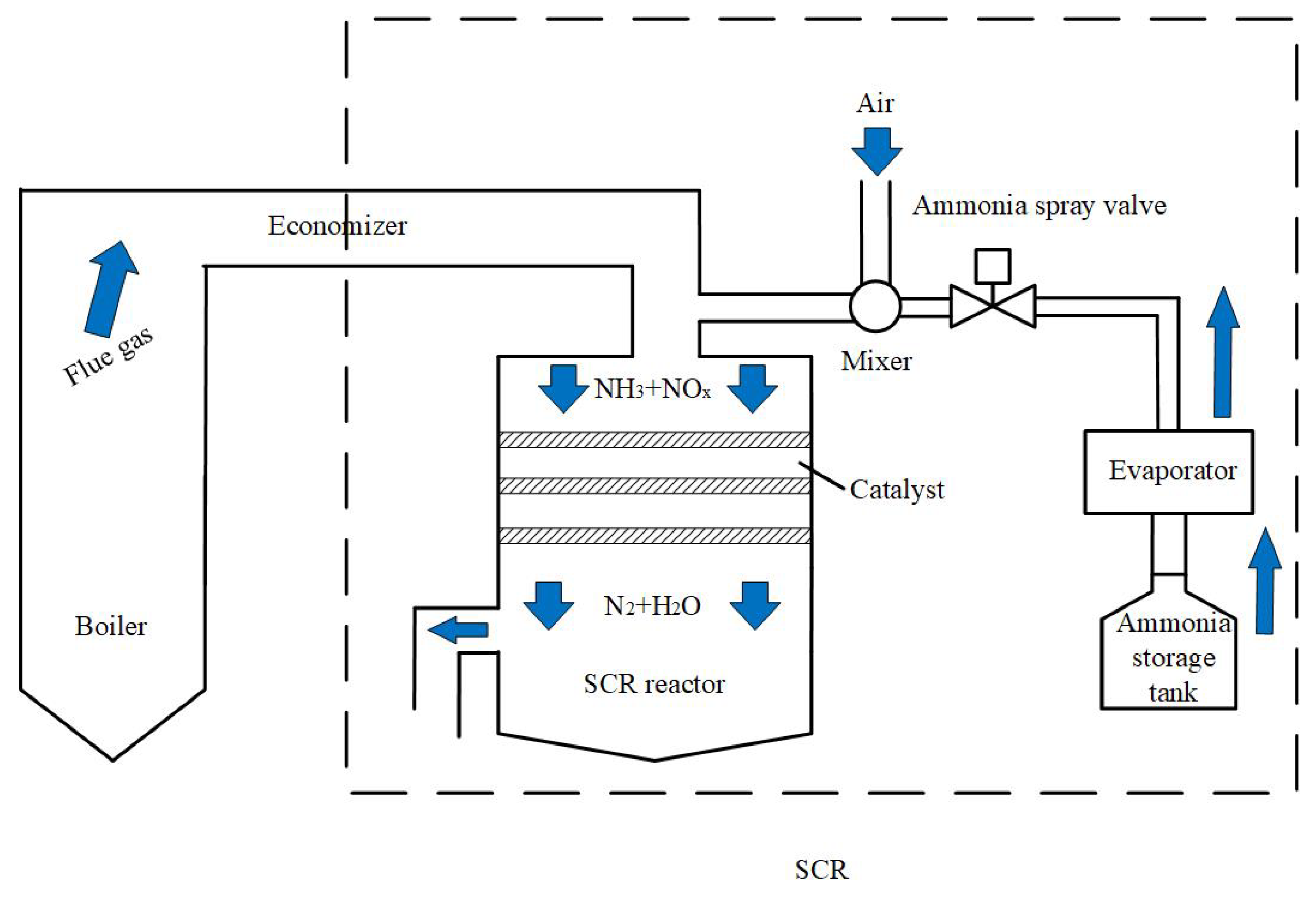
2. SCR Denitrification Process
2.1. Reaction Process of SCR Denitrification System
2.2. Dynamic Mechanism of the SCR Denitrification Reaction
3. Fractional Order Modeling and Identification
3.1. Fundamental Concept of Fractional Calculus
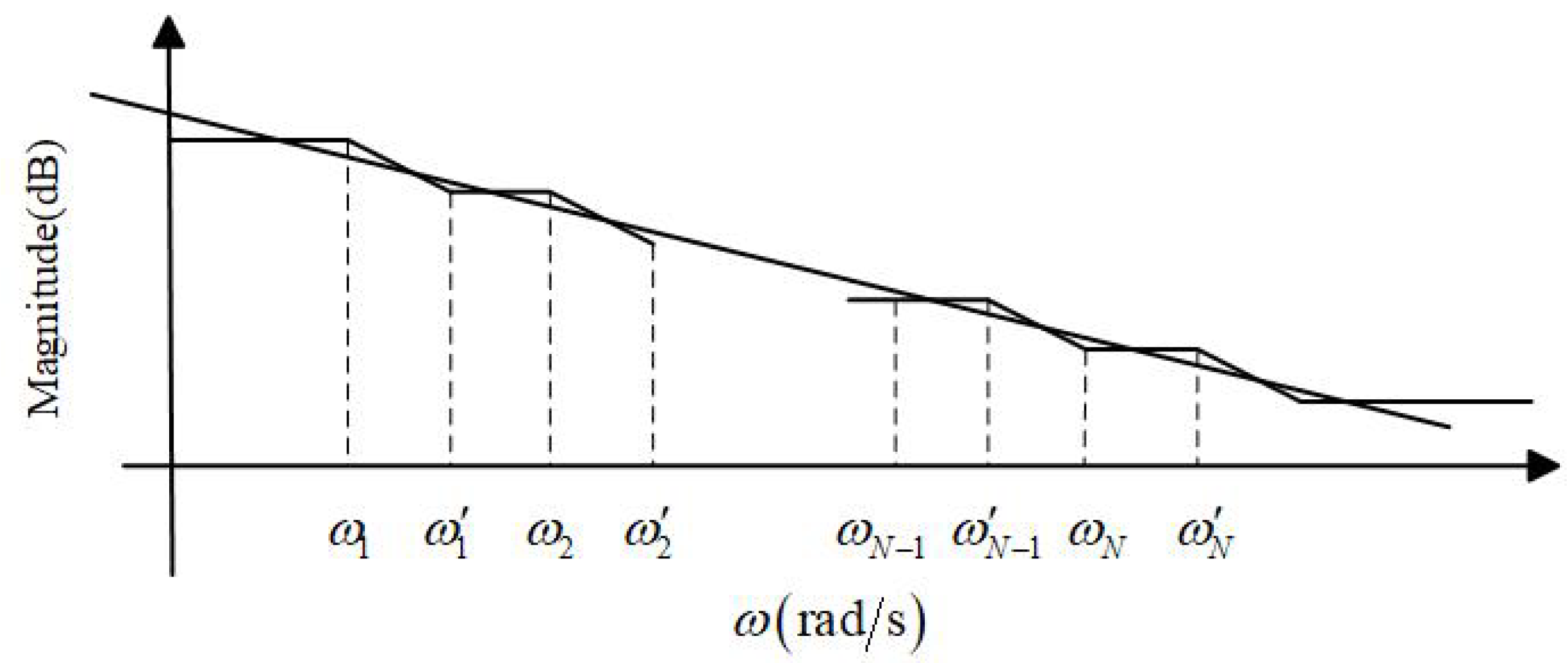
3.2. Approximation of Fractional-Order Operator and System
3.3. Identification of the Fractional-Order Model with Time Delay
- Line search: search along the given direction, determine the optimal step size, and update the solution.
- (a)
- Search direction : quasi-Newton direction is determined as follows:where , J is the maximum number of iterations (400 in this paper).
- (b)
- Step size : the Wolfe conditions are used to determine the search step size to ensure effective descent and improve convergence speed. The Wolfe conditions are defined as follows:where . ensures a significant descent in the objective function at the step size, while ensures that the gradient of the objective function changes sufficiently at the new point. In this paper, and . In each iteration, the initial step size is set to 1. If the current step size does not satisfy the Wolfe conditions, the step size is updated according to the following formula until the Wolfe conditions are met:
- (c)
- Update solution : according to the search direction and step size, the solution is updated as follows:
- Update the approximation of the inverse of the Hessian matrix: the BFGS method uses information from the previous iteration and related increments to update the approximation of the inverse of the Hessian matrix:where and .
- Termination: In each iteration, early termination is determined by checking if the gradient, solution increment, and objective function increment fall below predefined tolerance:where .
| Algorithm 1 The pseudo-code of the identification procedure. |
|
4. Fractional-Order Model Identification of the SCR Denitrification Process
4.1. Experimental Setup
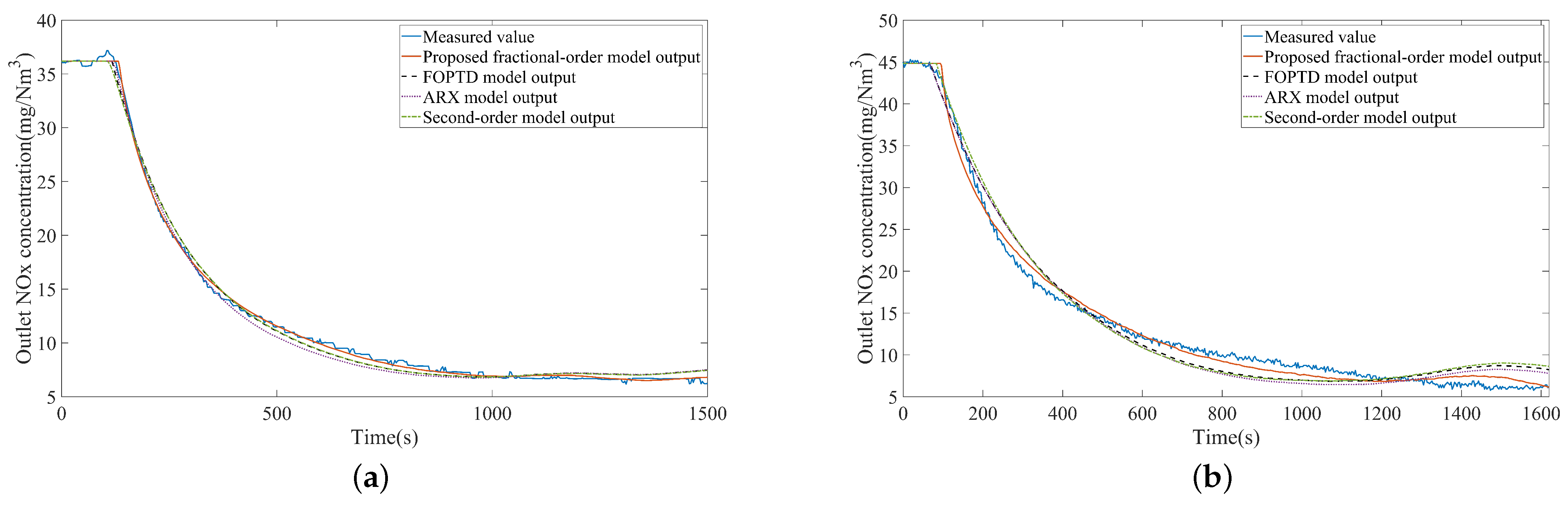
4.2. System Identification
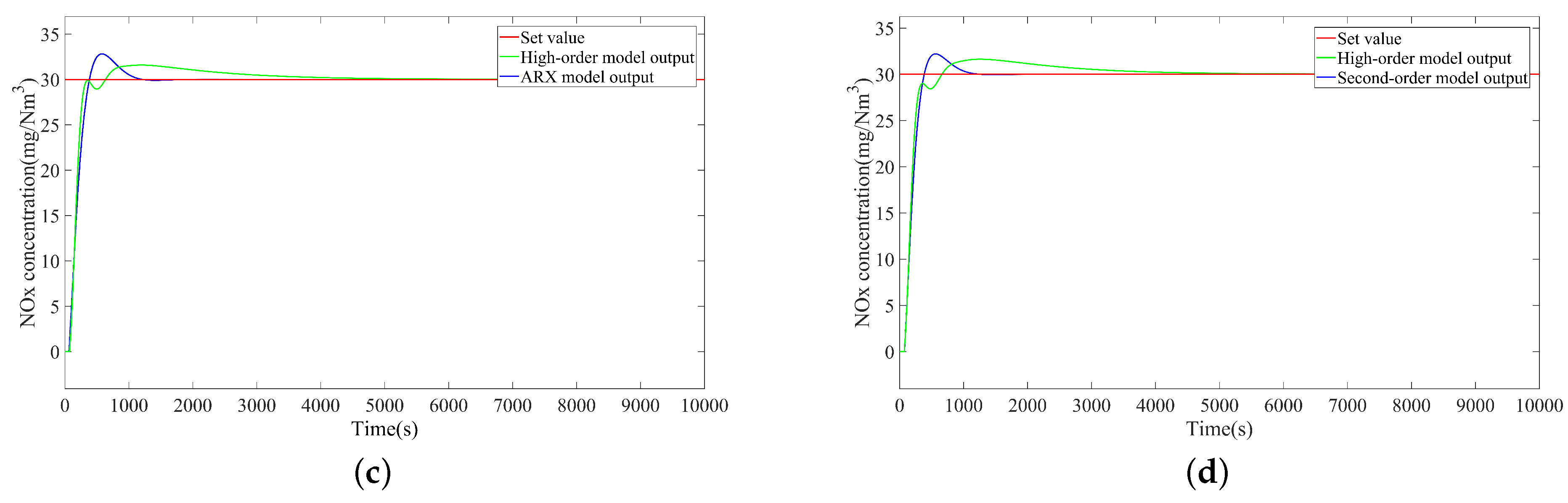
4.3. Model Verification Based on Closed-Loop Control Step Response
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Basic Syntax | Parameter Descriptions |
|---|---|---|
| x = fminunc(fun,x0) | x: Solution fun: Objective function x0: Initial solution | |
| y = lsim(sys,u,t) | y: Simulated response data sys: Dynamic system u: Input signal t: Time samples | |
| sys = tfest(tt,np,nz,iodelay) | sys: Identified transfer function tt: Timetable-based estimation data np: Number of poles nz: Number of zeros iodelay: Transport delay |
Appendix B
| Quantity | Unit |
|---|---|
| F | m3/s |
| V | m3 |
| R | J/(mol · K) |
| T | K |
| mol/m3 | |
| mol/m3 | |
| mol/m3 | |
| mol/m3 | |
| dimensionless | |
| mol/m3 | |
| m3/(mol · s) | |
| m3/(mol · s) | |
| m3/(mol · s) | |
| m3/(mol · s) | |
| J/mol | |
| J/mol | |
| J/mol | |
| J/mol |
References
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Zheng, W.; Luo, Y.; Chen, Y.; Pi, Y. Fractional-order modeling of permanent magnet synchronous motor speed servo system. J. Vib. Control 2016, 22, 2255–2280. [Google Scholar] [CrossRef]
- Gan, H.; Cao, Z.; Chen, P.; Luo, Y.; Luo, X. Fractional-order electromagnetic modeling and identification for PMSM servo system. ISA Trans. 2024, 147, 527–539. [Google Scholar] [CrossRef] [PubMed]
- Shi, H.; Liu, Y.; Chen, P.; Luo, Y.; Chen, Y. Fractional-Order Dynamics Modeling for Continuum Robots. In Proceedings of the 2023 International Conference on Fractional Differentiation and Its Applications (ICFDA), Ajman, United Arab Emirates, 14–16 March 2023; pp. 1–5. [Google Scholar]
- Sierociuk, D.; Skovranek, T.; Macias, M.; Podlubny, I.; Petras, I.; Dzielinski, A.; Ziubinski, P. Diffusion process modeling by using fractional-order models. Appl. Math. Comput. 2015, 257, 2–11. [Google Scholar] [CrossRef]
- Wang, B.; Li, S.E.; Peng, H.; Liu, Z. Fractional-order modeling and parameter identification for lithium-ion batteries. J. Power Sources 2015, 293, 151–161. [Google Scholar] [CrossRef]
- Zeng, J.; Wang, S.; Cao, W.; Zhang, M.; Fernandez, C.; Guerrero, J.M. Improved fractional-order hysteresis-equivalent circuit modeling for the online adaptive high-precision state of charge prediction of urban-electric-bus lithium-ion batteries. Int. J. Circuit Theory Appl. 2024, 52, 420–438. [Google Scholar] [CrossRef]
- Gude, J.J.; Bringas, P.G.; Herrera, M.; Rincón, L.; Di Teodoro, A.; Camacho, O. Fractional-order model identification based on the process reaction curve: A unified framework for chemical processes. Results Eng. 2024, 21, 101757. [Google Scholar] [CrossRef]
- Haider, M.; Abid, M.; Khan, A.Q.; Mustafa, G. Identification of Fractional-Order Systems with Time Delays Using the Method of Hybrid of Bernoulli Polynomials and Block Pulse Functions. Available online: https://ssrn.com/abstract=4416424 (accessed on 3 September 2024).
- Shalaby, R.; El-Hossainy, M.; Abo-Zalam, B. Fractional order modeling and control for under-actuated inverted pendulum. Commun. Nonlinear Sci. Numer. Simul. 2019, 74, 97–121. [Google Scholar] [CrossRef]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Trans. Am. Soc. Mech. Eng. 1942, 64, 759–765. [Google Scholar] [CrossRef]
- Pan, Y.; Yan, F.; Yang, J.; Zeng, X.; Li, X.; Qi, X. Mechanism Modeling of SCR Flue Gas Denitration Reaction System. In Proceedings of the International Conference on Frontier Computing, Seoul, Republic of Korea, 13–17 July 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 828–838. [Google Scholar]
- Li, J.; Shi, R.; Xu, C.; Wang, S. Process identification of the SCR system of coal-fired power plant for de-NOx based on historical operation data. Environ. Technol. 2019, 40, 3287–3296. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, J.; Zhu, X.; Jiao, Y. Model identification of SCR denitration system for 600 MW thermal power unit. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 1721–1726. [Google Scholar]
- Kang, J.; Niu, Y.; Hu, B.; Li, H.; Zhou, Z. Dynamic modeling of SCR denitration systems in coal-fired power plants based on a bi-directional long short-term memory method. Process. Saf. Environ. Prot. 2021, 148, 867–878. [Google Scholar] [CrossRef]
- Xie, P.; Gao, M.; Zhang, H.; Niu, Y.; Wang, X. Dynamic modeling for NOx emission sequence prediction of SCR system outlet based on sequence to sequence long short-term memory network. Energy 2020, 190, 116482. [Google Scholar] [CrossRef]
- An, B.; Tang, M.; Qiu, J.; Li, Z.; Wang, W.; Zhang, Y.; Yan, Y. Dynamic NO x Prediction Model for SCR Denitrification Outlet of Coal-Fired Power Plants Based on Hybrid Data-Driven and Model Ensemble. Ind. Eng. Chem. Res. 2023, 62, 14286–14299. [Google Scholar] [CrossRef]
- Wu, Z.; Sui, S.; Li, S.; Li, B.; Liu, Y.; Yang, L.; Li, D.; Chen, Y. Modified Active Disturbance Rejection Control Design Based on Gain Scheduling for Selective Catalytic Reduction Denitrification Processes. IEEE Trans. Ind. Electron. 2024, 1–11. [Google Scholar] [CrossRef]
- Tang, M.; An, B.; Yan, Y.; Zhang, Y.; Wang, W. Predictive control of SCR denitrification system in thermal power plants based on GA-BP and PSO. Can. J. Chem. Eng. 2023, 101, 5818–5831. [Google Scholar] [CrossRef]
- Yao, C.; Long, D.; Lv, Y.; Liu, J. Study on mechanism modelling and control of SCR denitrification system in thermal power plant. J. Eng. Therm. Energy Power 2018, 33, 78–84. [Google Scholar]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2000, 47, 25–39. [Google Scholar] [CrossRef]
- Xue, D. Fractional Calculus and Fractional-Order Control; Science Press: Beijing, China, 2018. [Google Scholar]
- Broyden, C.G. The convergence of a class of double-rank minimization algorithms 1. general considerations. IMA J. Appl. Math. 1970, 6, 76–90. [Google Scholar] [CrossRef]
- Fletcher, R. A new approach to variable metric algorithms. Comput. J. 1970, 13, 317–322. [Google Scholar] [CrossRef]
- Goldfarb, D. A Family of Variable-Metric Methods Derived by Variational Means. Math. Comput. 1970, 24, 23–26. [Google Scholar] [CrossRef]
- Shanno, D.F. Conditioning of quasi-Newton methods for function minimization. Math. Comput. 1970, 24, 647–656. [Google Scholar] [CrossRef]
- Conn, A.R.; Gould, N.I.; Toint, P.L. Trust Region Methods; SIAM: Philadelphia, PA, USA, 2000. [Google Scholar]
- Bayındır, C.; Farazande, S.; Altintas, A.A.; Ozaydin, F. Petviashvili method for the fractional Schrödinger equation. Fractal Fract. 2022, 7, 9. [Google Scholar] [CrossRef]
- Lopez-Cresencio, O.U.; Ariza-Hernandez, F.J.; Sanchez-Ortiz, J.; Arciga-Alejandre, M.P. A boundary value problem for a random-order fractional differential equation. Results Appl. Math. 2022, 16, 100328. [Google Scholar] [CrossRef]
- Jajarmi, A.; Hajipour, M.; Mohammadzadeh, E.; Baleanu, D. A new approach for the nonlinear fractional optimal control problems with external persistent disturbances. J. Frankl. Inst. 2018, 355, 3938–3967. [Google Scholar] [CrossRef]





| Model | Transfer Function of Ammonia Injection–Outlet Concentration | RMSE (mg/Nm3) |
|---|---|---|
| Fractional-order model | 0.2965 | |
| FOPTD model | 0.6082 | |
| ARX model | 0.6887 | |
| Second-order model | 0.6162 |
| Model | Transfer Function of Ammonia Injection–Outlet Concentration | RMSE (mg/Nm3) |
|---|---|---|
| Fractional-order model | 0.9390 | |
| FOPTD model | 1.6683 | |
| ARX model | 1.6944 | |
| Second-order model | 1.8092 |
| = 0.4 | = 0.6 | = 0.8 | = 1.0 | = 1.2 | |
|---|---|---|---|---|---|
| RMSE (mg/Nm3) | 0.9328 | 0.5863 | 0.3179 | 0.6082 | 1.5523 |
| = 0.2 | = 0.4 | = 0.6 | = 0.8 | = 1.0 | |
|---|---|---|---|---|---|
| RMSE (mg/Nm3) | 2.2985 | 1.2196 | 0.9825 | 1.1003 | 1.6683 |
| Load (MW) | Fractional-Order Model | FOPTD Model | ARX Model | Second-Order Model |
|---|---|---|---|---|
| 400 | 0.0941 | 0.2860 | 0.3236 | 0.2850 |
| 580 | 0.5323 | 0.8309 | 0.8525 | 0.8250 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ai, W.; Lin, X.; Luo, Y.; Wang, X. Fractional-Order Modeling and Identification for an SCR Denitrification Process. Fractal Fract. 2024, 8, 524. https://doi.org/10.3390/fractalfract8090524
Ai W, Lin X, Luo Y, Wang X. Fractional-Order Modeling and Identification for an SCR Denitrification Process. Fractal and Fractional. 2024; 8(9):524. https://doi.org/10.3390/fractalfract8090524
Chicago/Turabian StyleAi, Wei, Xinlei Lin, Ying Luo, and Xiaowei Wang. 2024. "Fractional-Order Modeling and Identification for an SCR Denitrification Process" Fractal and Fractional 8, no. 9: 524. https://doi.org/10.3390/fractalfract8090524
APA StyleAi, W., Lin, X., Luo, Y., & Wang, X. (2024). Fractional-Order Modeling and Identification for an SCR Denitrification Process. Fractal and Fractional, 8(9), 524. https://doi.org/10.3390/fractalfract8090524