
Consensus of T-S Fuzzy Fractional-Order, Singular Perturbation, Multi-Agent Systems




Abstract
1. Introduction
- 1
- To provide a more accurate portrayal of complex systems in practice, a T-S fuzzy FOSPMAS with is formulated to reduce the difficulty of directly studying nonlinear systems. Compared to integer-order systems, the constructed model exhibits enhanced accuracy and complexity. A fuzzy FOSPS with error as a variable is derived by designing a fuzzy observer-based controller.
- 2
- The fuzzy FOSPS is analyzed by transforming it into a fuzzy SFOS using the system augmentation method. In comparison to the existing methods [46], the proposed approach not only relaxes the assumption that the fast subsystem matrix must be non-singular but also avoids the ill-conditioned issue arising from the parameter.
- 3
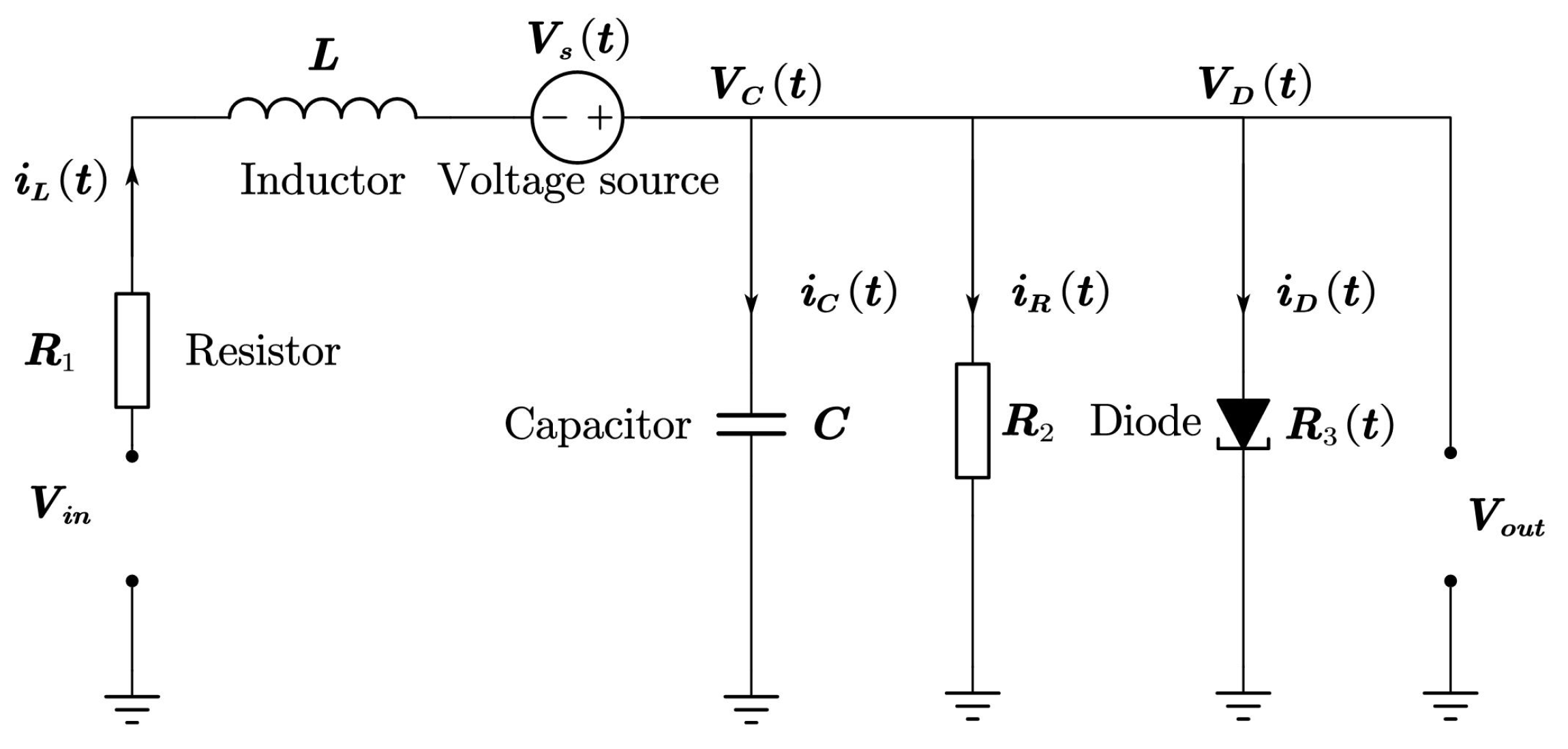
- The consensus conditions for fuzzy FOSPMASs with and are formulated in this study for any , where and are the lower and upper boundaries, respectively. The results are presented based on LMIs without equality constraints, reducing solution difficulties. It is demonstrated through an RLC circuit model that the proposed methods are effective in practice.
2. Preliminaries
2.1. Notations
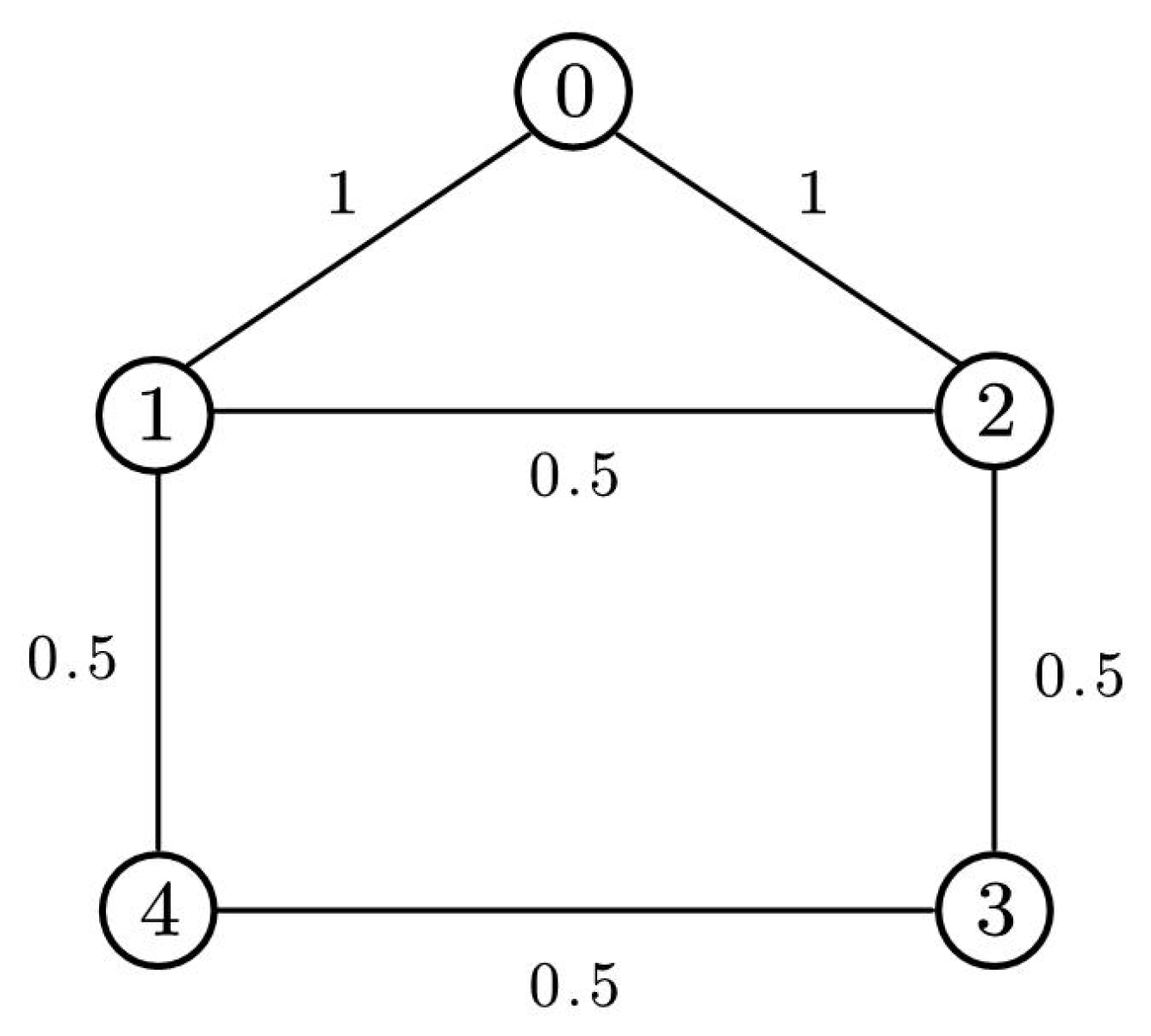
2.2. Graph Theory
2.3. Preliminary Lemmas
3. Main Results
3.1. System Model Description
3.2. Equivalent Transformations
3.3. Consensus Conditions of T-S Fuzzy FOSPMASs
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Santos, G.; Pinto, T.; Praça, I.; Vale, Z. MASCEM: Optimizing the performance of a multi-agent system. Energy 2016, 111, 513–524. [Google Scholar] [CrossRef]
- Jiménez, A.C.; García-Díaz, V.; Bolaños, S. A decentralized framework for multi-agent robotic systems. Sensors 2018, 18, 417. [Google Scholar] [CrossRef] [PubMed]
- Iñigo-Blasco, P.; Diaz-del-Rio, F.; Romero-Ternero, M.C.; Cagigas-Muñiz, D.; Vicente-Diaz, S. Robotics software frameworks for multi-agent robotic systems development. Robot. Auton. Syst. 2012, 60, 803–821. [Google Scholar] [CrossRef]
- Florez-Lozano, J.; Caraffini, F.; Parra, C.; Gongora, M. Cooperative and distributed decision-making in a multi-agent perception system for improvised land mines detection. Inf. Fusion 2020, 64, 32–49. [Google Scholar] [CrossRef]
- Yan, Z.W.; Han, L.; Li, X.D.; Dong, X.W.; Li, Q.D.; Ren, Z. Event-triggered formation control for time-delayed discrete-time multi-agent system applied to multi-UAV formation flying. J. Frankl. Inst. 2023, 360, 3677–3699. [Google Scholar] [CrossRef]
- Zhang, J.X.; Xu, K.D.; Wang, Q.G. Prescribed Performance Tracking Control of Time-Delay Nonlinear Systems with Output Constraints. IEEE/CAA J. Autom. Sin. 2024, 11, 1557–1565. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Low-Complexity Tracking Control of Strict-Feedback Systems with Unknown Control Directions. IEEE Trans. Autom. Control. 2019, 64, 5175–5182. [Google Scholar] [CrossRef]
- Ren, W. On Consensus Algorithms for Double-Integrator Dynamics. IEEE Trans. Autom. Control. 2008, 53, 1503–1509. [Google Scholar] [CrossRef]
- Tian, Y.P.; Liu, C.L. Consensus of Multi-Agent Systems with Diverse Input and Communication Delays. IEEE Trans. Autom. Control. 2008, 53, 2122–2128. [Google Scholar] [CrossRef]
- Wen, G.H.; Duan, Z.S.; Yu, W.W.; Chen, G.R. Consensus in multi-agent systems with communication constraints. Int. J. Robust Nonlinear Control. 2012, 22, 170–182. [Google Scholar] [CrossRef]
- Zhang, H.; Feng, G.; Yan, H.C.; Chen, Q.J. Observer-Based Output Feedback Event-Triggered Control for Consensus of Multi-Agent Systems. IEEE Trans. Ind. Electron. 2014, 61, 4885–4894. [Google Scholar] [CrossRef]
- Tan, M.C.; Song, Z.Q.; Zhang, X.M. Robust leader-following consensus of cyber–physical systems with cyber attack via sampled-data control. ISA Trans. 2021, 109, 61–71. [Google Scholar] [CrossRef] [PubMed]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Aslefallah, M.; Abbasbandy, S.; Shivanian, E. Numerical solution of a modified anomalous diffusion equation with nonlinear source term through meshless singular boundary method. Eng. Anal. Bound. Elem. 2019, 107, 198–207. [Google Scholar] [CrossRef]
- Lu, J.F.; Hanyga, A. Numerical modelling method for wave propagation in a linear viscoelastic medium with singular memory. Geophys. J. Int. 2004, 159, 688–702. [Google Scholar] [CrossRef]
- Liu, J.; Chen, S.; Tan, X. Fractional order singular value decomposition representation for face recognition. Pattern Recognit. 2008, 41, 378–395. [Google Scholar] [CrossRef]
- Ye, Y.Y.; Su, H.S. Leader-following consensus of general linear fractional-order multiagent systems with input delay via event-triggered control. Int. J. Robust Nonlinear Control. 2018, 28, 5717–5729. [Google Scholar] [CrossRef]
- Ye, Y.Y.; Su, H.S. Leader-following consensus of nonlinear fractional-order multi-agent systems over directed networks. Nonlinear Dyn. 2019, 96, 1391–1403. [Google Scholar] [CrossRef]
- Yang, R.; Liu, S.; Tan, Y.Y.; Zhang, Y.J.; Jiang, W. Consensus analysis of fractional-order nonlinear multi-agent systems with distributed and input delays. Neurocomputing 2019, 329, 46–52. [Google Scholar] [CrossRef]
- Yang, R.; Liu, S.; Li, X.Y.; Zhao, X.W.; Pan, G. Consensus of fractional-order delayed multi-agent systems in Riemann–Liouville sense. Neurocomputing 2020, 396, 123–129. [Google Scholar] [CrossRef]
- Hu, T.T.; He, Z.; Zhang, X.J.; Zhong, S.M. Leader-following consensus of fractional-order multi-agent systems based on event-triggered control. Nonlinear Dyn. 2020, 99, 2219–2232. [Google Scholar] [CrossRef]
- Bahrampour, E.; Asemani, M.H.; Dehghani, M.; Tavazoei, M. Consensus control of incommensurate fractional-order multi-agent systems: An LMI approach. J. Frankl. Inst. 2023, 360, 4031–4055. [Google Scholar] [CrossRef]
- Fridman, E. Robust sampled-data H∞ control of linear singularly perturbed systems. IEEE Trans. Autom. Control. 2006, 51, 470–475. [Google Scholar] [CrossRef]
- Yang, C.Y.; Zhang, L.L.; Sun, J. Anti-windup controller design for singularly perturbed systems subject to actuator saturation. IET Control. Theory Appl. 2016, 10, 469–476. [Google Scholar] [CrossRef]
- Saksena, V.R.; O’reilly, J.; Kokotovic, P.V. Singular perturbations and time-scale methods in control theory: Survey 1976–1983. Automatica 1984, 20, 273–293. [Google Scholar] [CrossRef]
- Naidu, D. Singular perturbations and time scales in control theory and applications: An overview. Dyn. Contin. Discret. Impuls. Syst. Ser. B 2002, 9, 233–278. [Google Scholar]
- Wang, Y.Y.; Shi, P.; Yan, H.C. Reliable control of fuzzy singularly perturbed systems and its application to electronic circuits. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 3519–3528. [Google Scholar] [CrossRef]
- Munje, R.; Patre, B.; Tiwari, A.; Munje, R.; Patre, B.; Tiwari, A. State feedback control using linear quadratic regulator. In Investigation of Spatial Control Strategies with Application to Advanced Heavy Water Reactor; Springer: Singapore, 2018; pp. 61–77. [Google Scholar]
- Xia, G.Q.; Zhang, Y.; Zhang, W.; Chen, X.M.; Yang, H.Y. Multi-time-scale 3-D coordinated formation control for multi-underactuated AUV with uncertainties: Design and stability analysis using singular perturbation methods. Ocean. Eng. 2021, 230, 109053. [Google Scholar] [CrossRef]
- Nagarale, R.M.; Patre, B.M. Composite fuzzy sliding mode control of nonlinear singularly perturbed systems. ISA Trans. 2014, 53, 679–689. [Google Scholar] [CrossRef] [PubMed]
- Litkouhi, B.; Khalil, H. Multirate and composite control of two-time-scale discrete-time systems. IEEE Trans. Autom. Control. 1985, 30, 645–651. [Google Scholar] [CrossRef]
- Yang, C.Y.; Che, Z.Y.; Shen, L.P. Integral sliding mode control for singularly perturbed systems with matched disturbances. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 2452–2456. [Google Scholar] [CrossRef]
- Gao, Y.B.; Sun, B.H.; Lu, G.P. Passivity-Based Integral Sliding-Mode Control of Uncertain Singularly Perturbed Systems. IEEE Trans. Circuits Syst. II Express Briefs 2011, 58, 386–390. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y.Y.; Wang, Z.M. H∞ observer-based sliding mode control for singularly perturbed systems with input nonlinearity. Nonlinear Dyn. 2016, 85, 573–582. [Google Scholar] [CrossRef]
- Fridman, E. Effects of small delays on stability of singularly perturbed systems. Automatica 2002, 38, 897–902. [Google Scholar] [CrossRef]
- Ben Rejeb, J.; Morărescu, I.-C.; Daafouz, J. Control design with guaranteed cost for synchronization in networks of linear singularly perturbed systems. Automatica 2018, 91, 89–97. [Google Scholar] [CrossRef]
- Tognetti, E.S.; Calliero, T.R.; Morărescu, I.-C.; Daafouz, J. Synchronization via output feedback for multi-agent singularly perturbed systems with guaranteed cost. Automatica 2021, 128, 109549. [Google Scholar] [CrossRef]
- Xu, J.; Niu, Y.G.; Zou, Y.Y. Finite-time consensus for singularity-perturbed multiagent system via memory output sliding-mode control. IEEE Trans. Cybern. 2021, 52, 8692–8702. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Wu, H.Q.; Cao, J.D. Global Mittag-Leffler consensus for fractional singularly perturbed multi-agent systems with discontinuous inherent dynamics via event-triggered control strategy. J. Frankl. Inst. 2021, 358, 2086–2114. [Google Scholar] [CrossRef]
- Wang, H.; Tanaka, K.; Griffin, M. Parallel distributed compensation of nonlinear systems by Takagi-Sugeno fuzzy model. In Proceedings of the 1995 IEEE International Conference on Fuzzy Systems, Yokohama, Japan, 20–24 March 1995; Volume 2, pp. 531–538. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Niemann, D.; Tanaka, K. T-S fuzzy model with linear rule consequence and PDC controller: A universal framework for nonlinear control systems. In Proceedings of the Ninth IEEE International Conference on Fuzzy Systems, FUZZ-IEEE 2000 (Cat. No.00CH37063), San Antonio, TX, USA, 7–10 May 2000; Volume 2, pp. 549–554. [Google Scholar] [CrossRef]
- Yang, C.Y.; Zhang, Q.L. Multiobjective Control for T–S Fuzzy Singularly Perturbed Systems. IEEE Trans. Fuzzy Syst. 2009, 17, 104–115. [Google Scholar] [CrossRef]
- Chen, J.X.; Sun, Y.G.; Min, H.B.; Sun, F.C.; Zhang, Y.G. New results on static output feedback H∞ control for fuzzy singularly perturbed systems: A linear matrix inequality approach. Int. J. Robust Nonlinear Control. 2013, 23, 681–694. [Google Scholar] [CrossRef]
- Visavakitcharoen, A.; Assawinchaichote, W.; Shi, Y.; Angeli, C. Event-triggered fuzzy integral control for a class of nonlinear singularly perturbed systems. ISA Trans. 2023, 139, 71–85. [Google Scholar] [CrossRef]
- Zhang, X.F.; Han, Z.R. Output feedback control of fractional order Takagi–Sugeno fuzzy singularly perturbed systems. J. Vib. Control. 2022, 28, 3162–3172. [Google Scholar] [CrossRef]
- Koskie, S.; Coumarbatch, C.; Gajic, Z. Exact slow-fast decomposition of the singularly perturbed matrix differential Riccati equation. Appl. Math. Comput. 2010, 216, 1401–1411. [Google Scholar] [CrossRef]
- Matignon, D. Stability results for fractional differential equations with applications to control processing. In Proceedings of the Computational Engineering in Systems Applications, Lille, France, 9–12 July 1996; Volume 2, pp. 963–968. [Google Scholar]
- Petráš, I. Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Zhang, X.F.; Chen, Y.Q. Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order α: The 0 < α < 1 case. ISA Trans. 2018, 82, 42–50. [Google Scholar] [PubMed]
- Marir, S.; Chadli, M.; Bouagada, D. New admissibility conditions for singular linear continuous-time fractional-order systems. J. Frankl. Inst. 2017, 354, 752–766. [Google Scholar] [CrossRef]
- Lee, H.J.; Park, J.B.; Chen, G.R. Robust fuzzy control of nonlinear systems with parametric uncertainties. IEEE Trans. Fuzzy Syst. 2001, 9, 369–379. [Google Scholar]
- Wang, Y.; Zhang, J.X.; Zhang, X. Fuzzy control of singular fractional order multi-agent systems with actuator saturation. Inf. Sci. 2024, 665, 120397. [Google Scholar] [CrossRef]
- Fan, X.; Wang, Z. A Fuzzy Lyapunov Function Method to Stability Analysis of Fractional-Order T–S Fuzzy Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 2769–2776. [Google Scholar] [CrossRef]
- Zhu, L.J.; Lu, J.G.; Zhu, Z. Robust stability and stabilization of uncertain fractional-order singularly perturbed systems. Comput. Appl. Math. 2024, 43, 58. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhang, X.; Pedrycz, W.; Yang, S.-H.; Boutat, D. Consensus of T-S Fuzzy Fractional-Order, Singular Perturbation, Multi-Agent Systems. Fractal Fract. 2024, 8, 523. https://doi.org/10.3390/fractalfract8090523
Wang X, Zhang X, Pedrycz W, Yang S-H, Boutat D. Consensus of T-S Fuzzy Fractional-Order, Singular Perturbation, Multi-Agent Systems. Fractal and Fractional. 2024; 8(9):523. https://doi.org/10.3390/fractalfract8090523
Chicago/Turabian StyleWang, Xiyi, Xuefeng Zhang, Witold Pedrycz, Shuang-Hua Yang, and Driss Boutat. 2024. "Consensus of T-S Fuzzy Fractional-Order, Singular Perturbation, Multi-Agent Systems" Fractal and Fractional 8, no. 9: 523. https://doi.org/10.3390/fractalfract8090523
APA StyleWang, X., Zhang, X., Pedrycz, W., Yang, S.-H., & Boutat, D. (2024). Consensus of T-S Fuzzy Fractional-Order, Singular Perturbation, Multi-Agent Systems. Fractal and Fractional, 8(9), 523. https://doi.org/10.3390/fractalfract8090523