
Synchronization Control of Complex Spatio-Temporal Networks Based on Fractional-Order Hyperbolic PDEs with Delayed Coupling and Space-Varying Coefficients


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Non-linear fractional-order complex spatio-temporal networks are modeled by hyperbolic space-varying PDEs in this paper, and have potential applications for flexible manipulators, flexible strings, flexible articulated wings, and flexible appendages.
- (2)
- One distributed controller with space-varying control gains is designed in this paper. It allows different nodes to own different gains.
- (3)
- Synchronization conditions of FCSNHSPDEs are presented by spatial algebraic LMIs, which contain space-varying coefficients. By using spatial algebraic LMIs, time-invariant delays and multiple time-varying delays within FCSNHSPDEs have been addressed, respectively.
2. Problem Formulation
3. Synchronization of FCSNHSPDEs with Time-Invariant Delays
4. Synchronization of FCSNHSPDEs with Time-Varying Delays
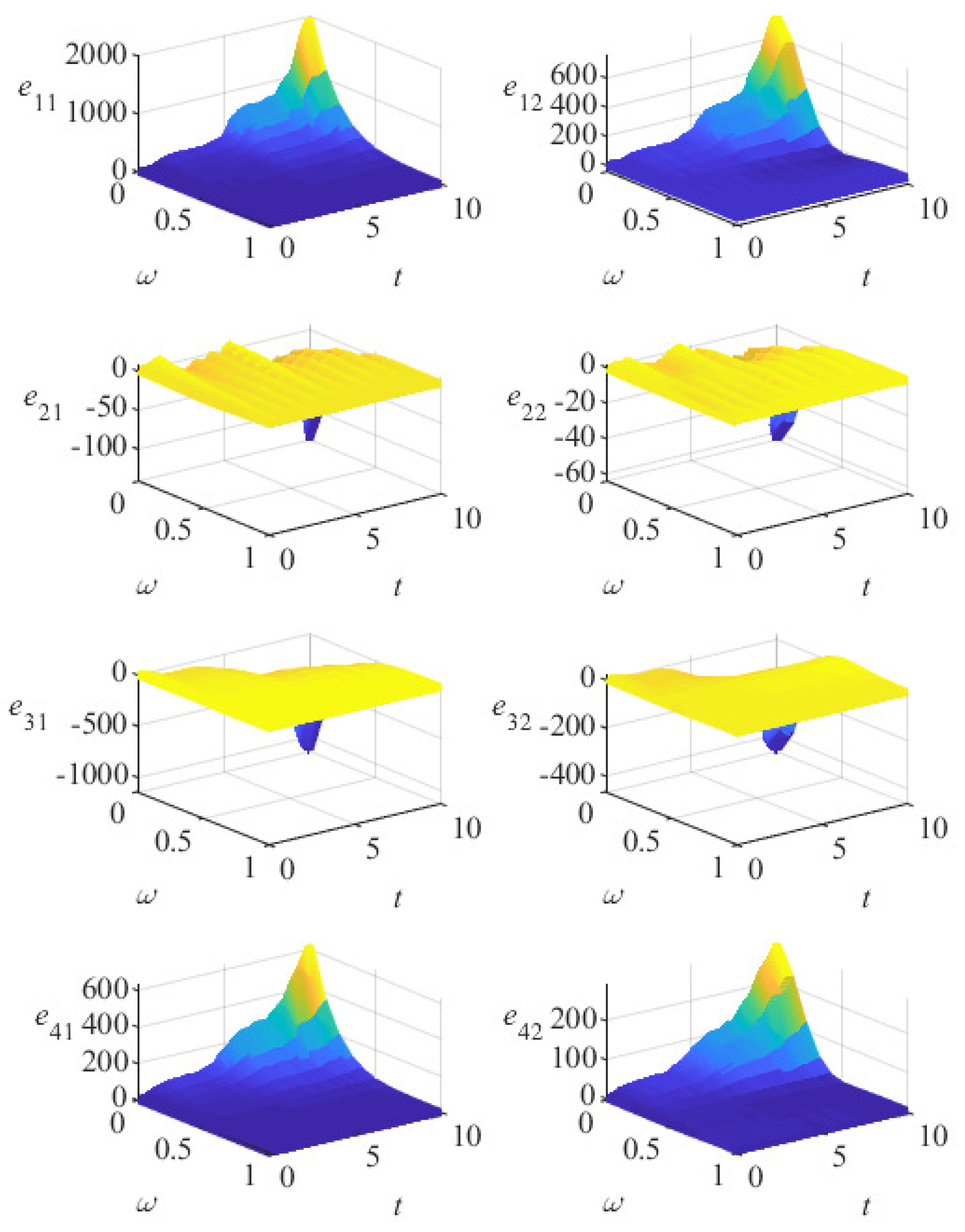
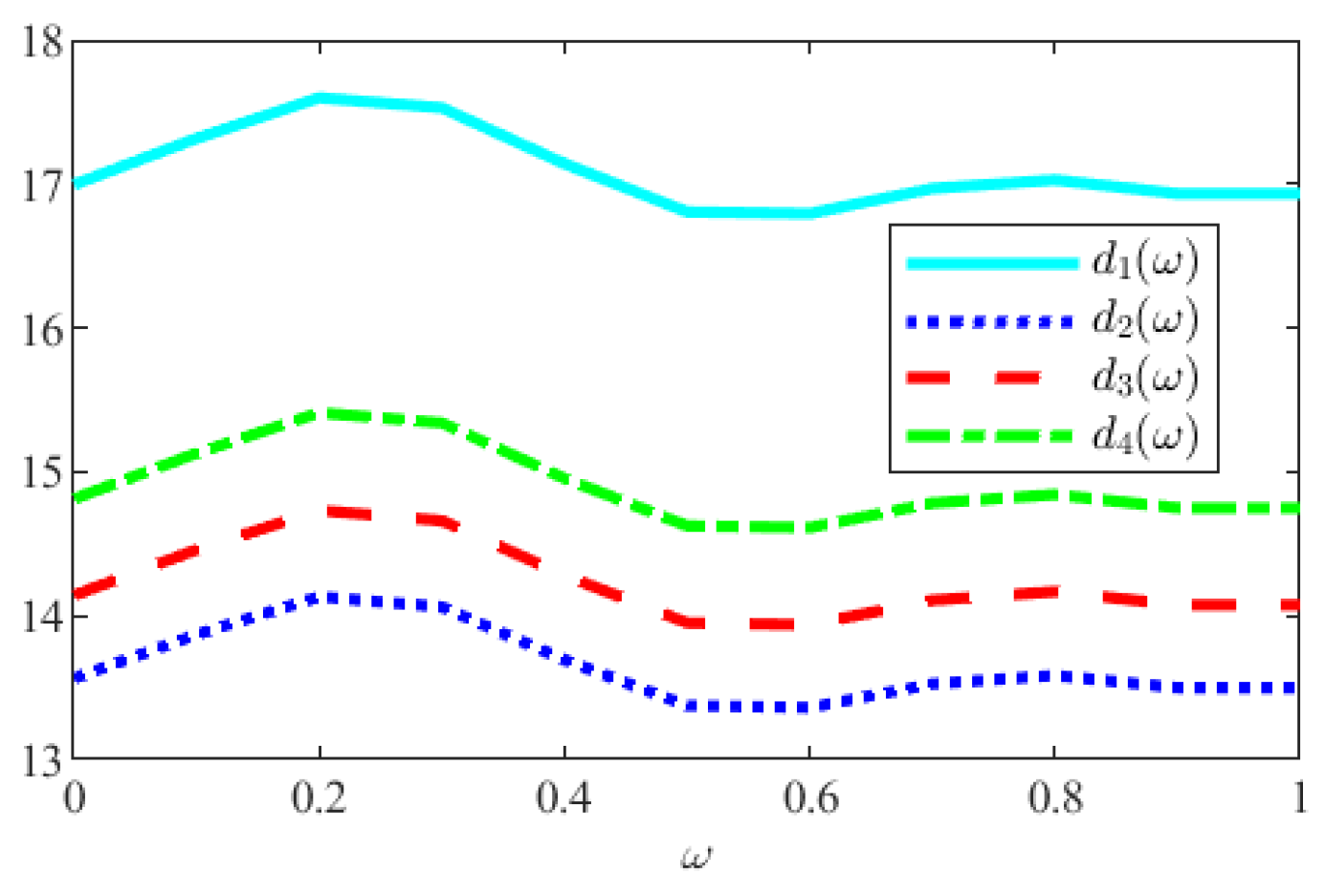
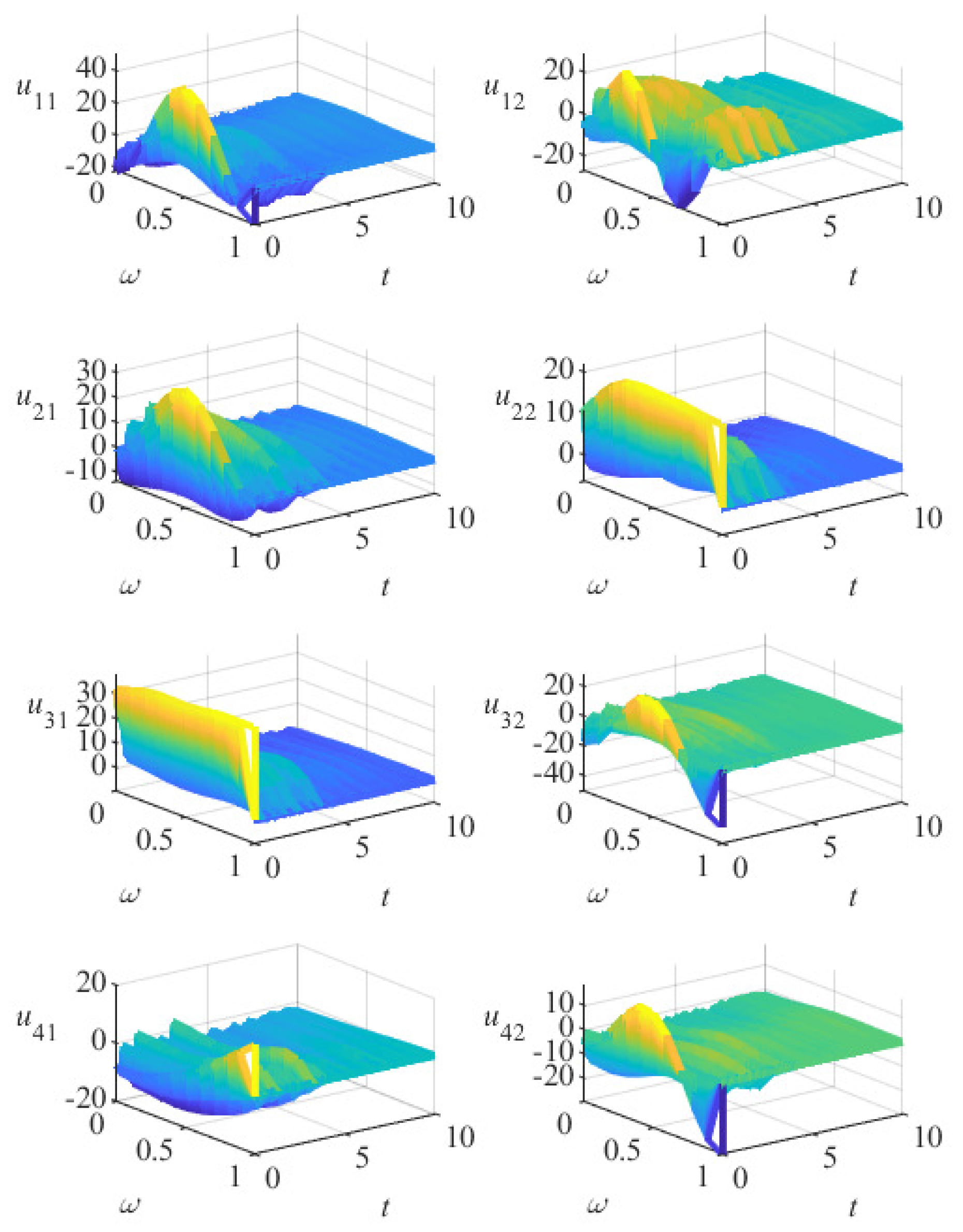
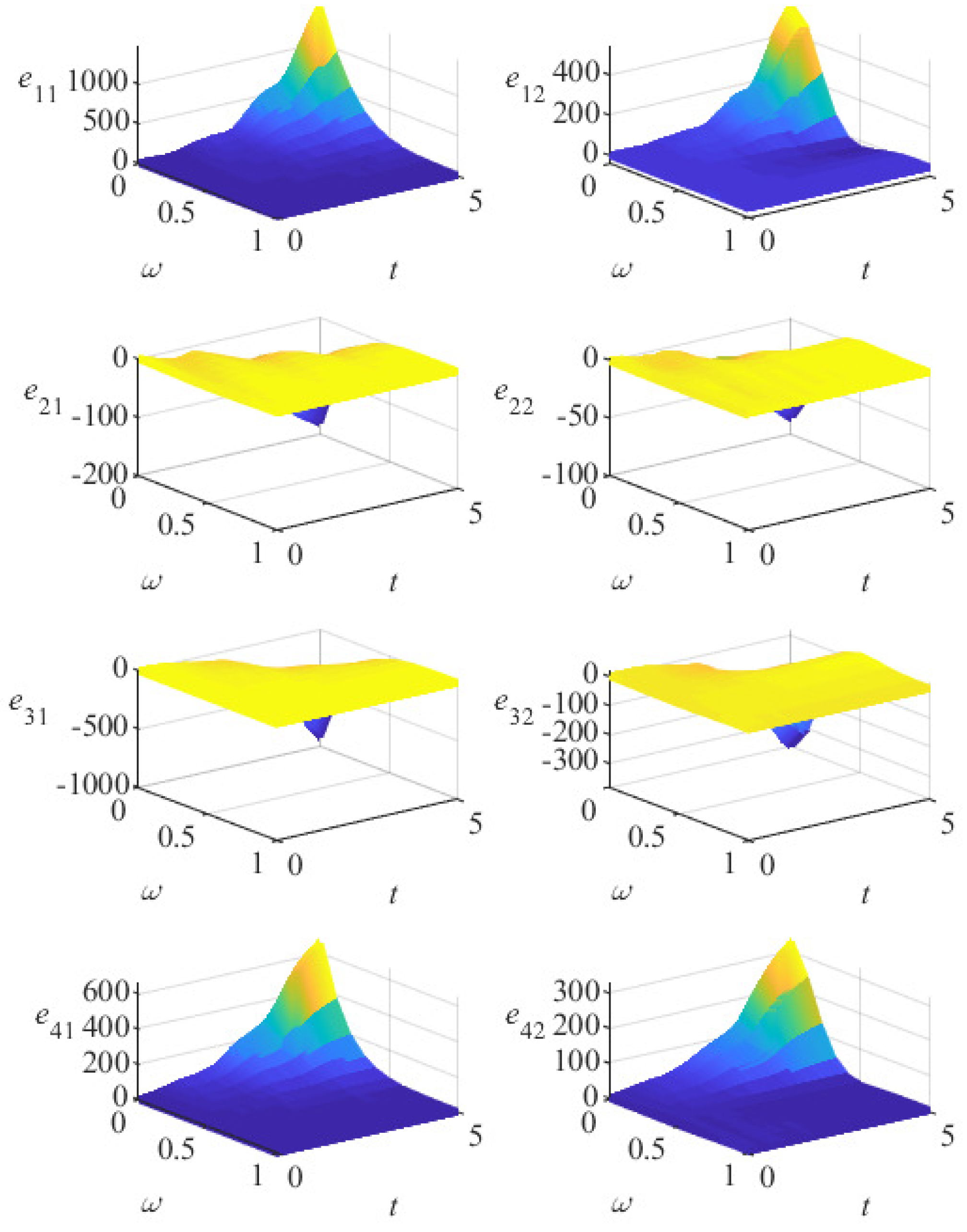
5. Numerical Examples
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, D.; Hu, F.; Wang, S.; Chen, J. Power network robustness analysis based on electrical engineering and complex network theory. Phys. A Stat. Mech. Its Appl. 2021, 564, 125540. [Google Scholar] [CrossRef]
- Lobsang, T.; Zhen, F.; Zhang, S.; Xi, G.; Yang, Y. Methodological framework for understanding urban people flow from a complex network perspective. J. Urban Plan. Dev. 2021, 147, 04021020. [Google Scholar] [CrossRef]
- Liu, X.; Ye, S.; Fiumara, G.; De Meo, P. Influential spreaders identification in complex networks with TOPSIS and K-shell decomposition. IEEE Trans. Comput. Soc. Syst. 2023, 10, 347–361. [Google Scholar] [CrossRef]
- Wen, T.; Gao, Q.; Chen, Y.; Cheong, K. Exploring the vulnerability of transportation networks by entropy: A case study of Asia–Europe maritime transportation network. Reliab. Eng. Syst. Saf. 2022, 226, 108578. [Google Scholar] [CrossRef]
- Reddy, K.N.; Kumar, A.; Choudhary, A.; Cheng, T.E. Multi-period green reverse logistics network design: An improved Benders-decomposition-based heuristic approach. Eur. J. Oper. Res. 2022, 303, 735–752. [Google Scholar] [CrossRef]
- Cheng, J.; Yin, P. Analysis of the complex network of the urban function under the lockdown of COVID-19: Evidence from Shenzhen in China. Mathematics 2022, 10, 2412. [Google Scholar] [CrossRef]
- Rubinov, M.; Sporns, O. Complex network measures of brain connectivity: Uses and interpretations. Neuroimage 2010, 52, 1059–1069. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, Z.; Chu, D.; Li, W. Sampled-data synchronization of complex network based on periodic self-triggered intermittent control and its application to image encryption. Neural Netw. 2022, 152, 419–433. [Google Scholar] [CrossRef] [PubMed]
- Sitzenfrei, R. Using complex network analysis for water quality assessment in large water distribution systems. Water Res. 2021, 201, 117359. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, F.; Zhang, J.; Liu, T. Attack isolation and location for a complex network cyber-physical system via zonotope theory. Neurocomputing 2022, 469, 239–250. [Google Scholar] [CrossRef]
- Barkoky, A.; Charkari, N.M. Complex Network-based features extraction in RGB-D human action recognition. J. Vis. Commun. Image Represent. 2022, 82, 103371. [Google Scholar] [CrossRef]
- Yang, C.; Huang, T.; Zhang, A.; Qiu, J.; Cao, J.; Alsaadi, F.E. Output consensus of multi-agent systems based on PDEs with input constraint: A boundary control approach. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 370–377. [Google Scholar] [CrossRef]
- Yan, X.; Yang, C.; Cao, J.; Korovin, I.; Gorbachev, S.; Gorbacheva, N. Boundary consensus control strategies for fractional-order multi-agent systems with reaction-diffusion terms. Inf. Sci. 2022, 616, 461–473. [Google Scholar] [CrossRef]
- Yang, Y.; Qi, Q.; Hu, J.; Dai, J.; Yang, C. Adaptive fault-tolerant control for consensus of nonlinear fractional-order multi-agent systems with diffusion. Fractal Fract. 2023, 7, 760. [Google Scholar] [CrossRef]
- Zheng, Y.; Yang, C.; Li, Z.; Zhang, A.; Qiu, J. Boundary containment control of multi-agent systems with time-invariant and time-varying delays. J. Frankl. Inst. 2024, 361, 106923. [Google Scholar] [CrossRef]
- Wang, Z.; Jin, X.; Pan, L.; Feng, Y.; Cao, J. Quasi-synchronization of delayed stochastic multiplex networks via impulsive pinning control. IEEE Trans. Syst. Man, Cybern. Syst. 2022, 52, 5389–5397. [Google Scholar] [CrossRef]
- Chai, L.; Liu, J.; Chen, G.; Zhao, X. Dynamics and synchronization of a complex-valued star network. Sci. China Technol. Sci. 2021, 64, 2729–2743. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, J. Synchronization of high-dimensional Kuramoto models with nonidentical oscillators and interconnection digraphs. IET Control Theory Appl. 2022, 16, 244–255. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, Y.; Wang, J.W.; Li, H.X. Backstepping-based distributed abnormality localization for linear parabolic distributed parameter systems. Automatica 2022, 135, 109930. [Google Scholar] [CrossRef]
- Wang, J.W.; Wang, J.M. Spatiotemporally asynchronous sampled-data control of a linear parabolic PDE on a hypercube. Int. J. Control 2022, 95, 3326–3335. [Google Scholar] [CrossRef]
- Lin, C.; Cai, X. Stabilization of a class of nonlinear ODE/Wave PDE cascaded systems. IEEE Access 2022, 10, 35653–35664. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.W.; Wu, Z.; Ren, Z.; Xie, S. Robust H∞ control for semilinear parabolic distributed parameter systems with external disturbances via mobile actuators and sensors. IEEE Trans. Cybern. 2022, 53, 4880–4893. [Google Scholar] [CrossRef] [PubMed]
- Mathiyalagan, K.; Ragul, R.; Sangeetha, G.; Ma, Y.K. Exponential stability analysis of stochastic semi-linear systems with Lèvy noise. IEEE Access 2022, 10, 73871–73878. [Google Scholar]
- Liu, Z.; Liu, J.; He, W. Partial differential equation boundary control of a flexible manipulator with input saturation. Int. J. Syst. Sci. 2017, 48, 53–62. [Google Scholar] [CrossRef]
- Liu, Z.; Han, Z.; Zhao, Z.; He, W. Modeling and adaptive control for a spatial flexible spacecraft with unknown actuator failures. Sci. China Inf. Sci. 2021, 64, 152208. [Google Scholar] [CrossRef]
- Cao, Y.; Kao, Y.; Park, J.H.; Bao, H. Global Mittag–Leffler stability of the delayed fractional-coupled reaction-diffusion system on networks without strong connectedness. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6473–6483. [Google Scholar] [CrossRef]
- Yang, C.; Cao, J.; Huang, T.; Zhang, J.; Qiu, J. Guaranteed cost boundary control for cluster synchronization of complex spatio-temporal dynamical networks with community structure. Sci. China Inf. Sci. 2018, 61, 052203. [Google Scholar] [CrossRef]
- Xie, L.; Zhao, Y. Synchronization of some kind of PDE chaotic systems by invariant manifold method. Int. J. Bifurc. Chaos 2005, 15, 2303–2309. [Google Scholar] [CrossRef]
- Yang, C.; Li, Z.; Chen, X.; Zhang, A.; Qiu, J. Boundary control for exponential synchronization of reaction-diffusion neural networks based on coupled PDE-ODEs. IFAC-PapersOnLine 2020, 53, 3415–3420. [Google Scholar] [CrossRef]
- Kocarev, L.; Tasev, Z.; Parlitz, U. Synchronizing spatiotemporal chaos of partial differential equations. Phys. Rev. Lett. 1997, 79, 51. [Google Scholar] [CrossRef]
- Xia, T.; Scardovi, L. Synchronization analysis of networks of linear parabolic partial differential equations. IEEE Control Syst. Lett. 2020, 5, 475–480. [Google Scholar] [CrossRef]
- Demetriou, M.A. Synchronization and consensus controllers for a class of parabolic distributed parameter systems. Syst. Control Lett. 2013, 62, 70–76. [Google Scholar] [CrossRef]
- Kabalan, A.; Ferrante, F.; Casadei, G.; Cristofaro, A.; Prieur, C. Leader-follower synchronization of a network of boundary-controlled parabolic equations with in-domain coupling. IEEE Control Syst. Lett. 2021, 6, 2006–2011. [Google Scholar] [CrossRef]
- Zheng, B.; Hu, C.; Yu, J.; Jiang, H. Synchronization analysis for delayed spatio-temporal neural networks with fractional-order. Neurocomputing 2021, 441, 226–236. [Google Scholar] [CrossRef]
- Hu, C.; He, H.; Jiang, H. Edge-based adaptive distributed method for synchronization of intermittently coupled spatiotemporal networks. IEEE Trans. Autom. Control 2021, 67, 2597–2604. [Google Scholar] [CrossRef]
- Yang, C.; Yang, C.; Hu, C.; Qiu, J.; Cao, J. Two boundary coupling approaches for synchronization of stochastic reaction-diffusion neural networks based on semi-linear PIDEs. J. Frankl. Inst. 2022, 359, 10813–10830. [Google Scholar] [CrossRef]
- Yang, S.; Jiang, H.; Hu, C.; Yu, J. Exponential synchronization of fractional-order reaction-diffusion coupled neural networks with hybrid delay-dependent impulses. J. Frankl. Inst. 2021, 358, 3167–3192. [Google Scholar] [CrossRef]
- Li, T. From phenomena of synchronization to exact synchronization and approximate synchronization for hyperbolic systems. Sci. China Math. 2016, 59, 1–18. [Google Scholar] [CrossRef]
- Li, T.; Lu, X. Exact boundary synchronization for a kind of first order hyperbolic system. ESAIM Control. Optim. Calc. Var. 2022, 28, 34. [Google Scholar] [CrossRef]
- Lu, X. Local exact boundary synchronization for a kind of first order quasilinear hyperbolic systems. Chin. Ann. Math. Ser. B 2019, 40, 79–96. [Google Scholar] [CrossRef]
- Ma, H.; Yang, C. Exponential synchronization of hyperbolic complex spatio-temporal networks with multi-weights. Mathematics 2022, 10, 2451. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Y.; Zhao, X.; Cao, J. Analysis and synthesis of gradient algorithms based on fractional-order system theory. IEEE Trans. Syst. Man, Cybern. Syst. 2022, 53, 1895–1906. [Google Scholar] [CrossRef]
- Ben Makhlouf, A.; Baleanu, D. Finite time stability of fractional order systems of neutral type. Fractal Fract. 2022, 6, 289. [Google Scholar] [CrossRef]
- Yan, X.; Li, K.; Zhuang, J.; Yang, C.; Cao, J. Boundary control strategies for consensus of fractional-order multi-agent systems based on coupling PDE-ODEs. IEEE Trans. Circuits Syst. II Express Briefs 2023, 71, 2179–2183. [Google Scholar] [CrossRef]
- Yan, X.; Li, K.; Yang, C.; Zhuang, J.; Cao, J. Consensus of fractional-order multi-agent systems via observer-based boundary control. IEEE Trans. Netw. Sci. Eng. 2024, 11, 3370–3382. [Google Scholar] [CrossRef]
- Zhao, L.; Wu, H.; Cao, J. Event-triggered boundary consensus control for multi-agent systems of fractional reaction–diffusion PDEs. Commun. Nonlinear Sci. Numer. Simul. 2023, 127, 107538. [Google Scholar] [CrossRef]
- Wang, X.; Huang, N. Finite-time consensus of multi-agent systems driven by hyperbolic partial differential equations via boundary control. Appl. Math. Mech. 2021, 42, 1799–1816. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science Limited: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Lv, Y.; Hu, C.; Yu, J.; Jiang, H.; Huang, T. Edge-based fractional-order adaptive strategies for synchronization of fractional-order coupled networks with reaction–Diffusion terms. IEEE Trans. Cybern. 2018, 50, 1582–1594. [Google Scholar] [CrossRef]
- Yang, C.; Yang, Y.; Yang, C.; Zhu, J.; Zhang, A.; Qiu, J. Adaptive control for synchronization of semi-linear complex spatio-temporal networks with time-invariant coupling delay and time-variant coupling delay. Int. J. Adapt. Control Signal Process. 2022, 36, 2640–2659. [Google Scholar] [CrossRef]
- Dai, J.; Yang, C.; Yan, X.; Wang, J.; Zhu, K.; Yang, C. Leaderless consensus control of nonlinear PIDE-type multi-agent systems with time delays. IEEE Access 2022, 10, 21211–21218. [Google Scholar] [CrossRef]
- Wang, J.W.; Wang, J.M. Spatiotemporal adaptive state feedback control of a linear parabolic partial differential equation. Int. J. Robust Nonlinear Control 2023, 33, 3850–3873. [Google Scholar] [CrossRef]
- Ammari, O.; Giri, F.; Krstic, M.; Chaoui, F.; El Majdoub, K. Adaptive observer design for heat PDEs with discrete and distributed delays and parameter uncertainties. IFAC-PapersOnLine 2023, 56, 8952–8957. [Google Scholar] [CrossRef]
- Wang, Z.P.; Wu, H.N.; Wang, X.H. Sampled-data fuzzy control with space-varying gains for nonlinear time-delay parabolic PDE systems. Fuzzy Sets Syst. 2020, 392, 170–194. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Wang, J.; Jian, M.; Dai, J. Synchronization Control of Complex Spatio-Temporal Networks Based on Fractional-Order Hyperbolic PDEs with Delayed Coupling and Space-Varying Coefficients. Fractal Fract. 2024, 8, 525. https://doi.org/10.3390/fractalfract8090525
Yang C, Wang J, Jian M, Dai J. Synchronization Control of Complex Spatio-Temporal Networks Based on Fractional-Order Hyperbolic PDEs with Delayed Coupling and Space-Varying Coefficients. Fractal and Fractional. 2024; 8(9):525. https://doi.org/10.3390/fractalfract8090525
Chicago/Turabian StyleYang, Chengyan, Jin Wang, Muwei Jian, and Jiashu Dai. 2024. "Synchronization Control of Complex Spatio-Temporal Networks Based on Fractional-Order Hyperbolic PDEs with Delayed Coupling and Space-Varying Coefficients" Fractal and Fractional 8, no. 9: 525. https://doi.org/10.3390/fractalfract8090525
APA StyleYang, C., Wang, J., Jian, M., & Dai, J. (2024). Synchronization Control of Complex Spatio-Temporal Networks Based on Fractional-Order Hyperbolic PDEs with Delayed Coupling and Space-Varying Coefficients. Fractal and Fractional, 8(9), 525. https://doi.org/10.3390/fractalfract8090525