


Event-Triggered Adaptive Fuzzy Control for Strict-Feedback Nonlinear FOSs Subjected to Finite-Time Full-State Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Compared with state constrained controller [23,25,27,34] or finite-time controller for nonlinear FOSs [35,36,37,38], an event-triggered adaptive fuzzy finite-time DSC approach for strict-feedback uncertain nonlinear FOSs with actuator saturation and full-state constraints is proposed, in which the fuzzy logic systems are employed to approximate uncertain nonlinear functions in the backstepping process and the dynamic surface method is applied to overcome the inherent computational complexity from the virtual controller.
- (2)
- Compared with the results in [39,40], the event-triggered mechanism is designed together with finite-time full-state constrained adaptive controller, and the finite-time stability of the closed-loop systems is proved based on fractional-order Lyapunov criterion, which reduces the consumption of network resources to make the proposed controller more general for application.
2. Problem Formulations and Preliminary
2.1. Systems Dynamics and Some Basic Assumptions
- (1)
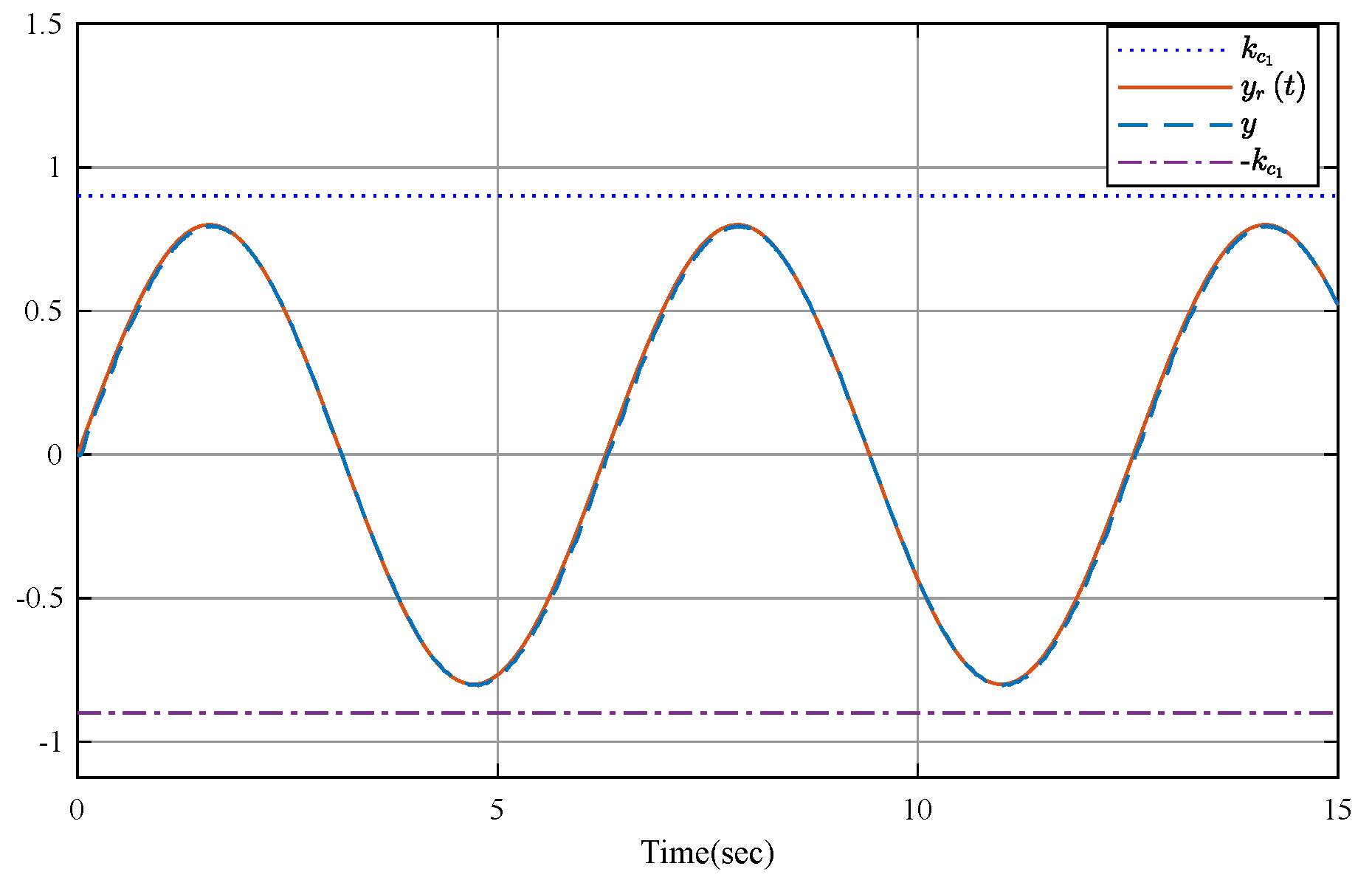
- output y follows desired , and the tracking error converges to a small neighborhood of the origin in finite time;
- (2)
- the full-state constraints are satisfied no later than the predetermined finite time;
- (3)
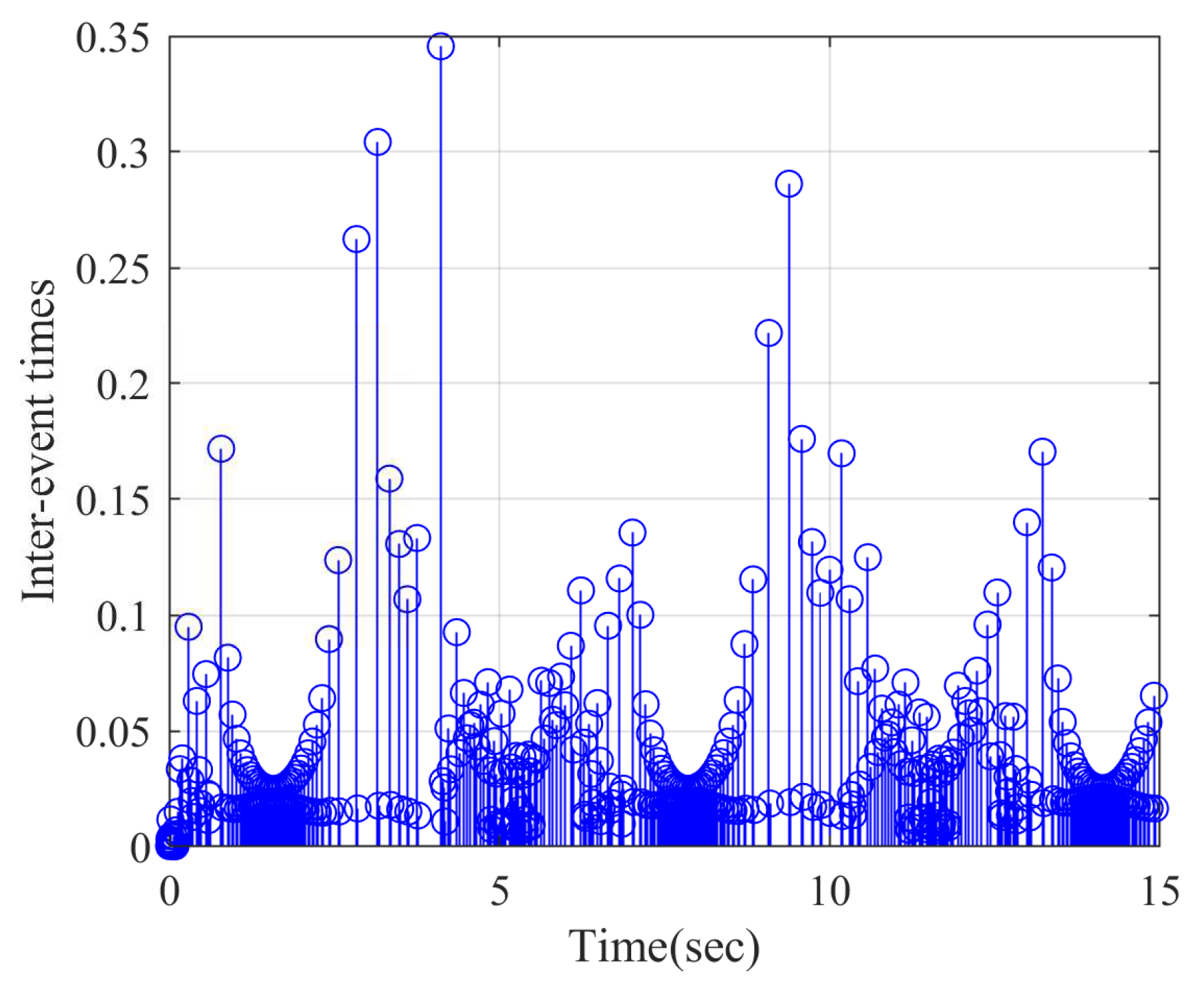
- all the signals in the closed-loop system remain boundedness and the Zeno behavior is avoided to occur.
2.2. Necessary Preparations
3. Main Results
3.1. Design of Adaptive Event-Triggered Controller
3.2. Stability Analysis
4. Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, H.; Zhang, Y.; Baleanu, D.; Chen, W.; Chen, Y. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 213–231. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Soleimanizadeh, A.; Nekoui, M.A. Optimal type-2 fuzzy synchronization of two different fractional-order chaotic systems with variable orders with an application to secure communication. Soft Comput. 2021, 25, 6415–6426. [Google Scholar] [CrossRef]
- Li, R.G.; Wu, H.N. Adaptive synchronization control with optimization policy for fractional-order chaotic systems between 0 and 1 and its application in secret communication. ISA Trans. 2019, 92, 35–48. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, S.D.; Lam, B.D.; Choi, S.B. Smart dampers-based vibration control–Part 2: Fractional-order sliding control for vehicle suspension system. Mech. Syst. Signal Process. 2021, 148, 107145. [Google Scholar] [CrossRef]
- Chen, E.; Xing, W.; Wang, M.; Ma, W.; Chang, Y. Study on chaos of nonlinear suspension system with fractional-order derivative under random excitation. Chaos Solitons Fractals 2021, 152, 111300. [Google Scholar] [CrossRef]
- Jin, T.; Xia, H.; Deng, W.; Li, Y.; Chen, H. Uncertain fractional-order multi-objective optimization based on reliability analysis and application to fractional-order circuit with caputo type. Circuits Syst. Signal Process. 2021, 40, 5955–5982. [Google Scholar] [CrossRef]
- Wang, M.; Liao, X.; Deng, Y.; Li, Z.; Su, Y.; Zeng, Y. Dynamics, synchronization and circuit implementation of a simple fractional-order chaotic system with hidden attractors. Chaos Solitons Fractals 2020, 130, 109406. [Google Scholar] [CrossRef]
- Shi, J.; He, K.; Fang, H. Chaos, Hopf bifurcation and control of a fractional-order delay financial system. Math. Comput. Simul. 2022, 194, 348–364. [Google Scholar] [CrossRef]
- Wang, Y.L.; Jahanshahi, H.; Bekiros, S.; Bezzina, F.; Chu, Y.M.; Aly, A.A. Deep recurrent neural networks with finite-time terminal sliding mode control for a chaotic fractional-order financial system with market confidence. Chaos Solitons Fractals 2021, 146, 110881. [Google Scholar] [CrossRef]
- Yang, B.; Shi, X.; Chen, X. Image Analysis by Fractional-Order Gaussian-Hermite Moments. IEEE Trans. Image Process. 2022, 31, 2488–2502. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Mou, J.; Xiong, L.; Wang, Z.; Xu, J. Fractional-order double-ring erbium-doped fiber laser chaotic system and its application on image encryption. Opt. Laser Technol. 2021, 140, 107074. [Google Scholar] [CrossRef]
- Gokulakrishnan, V.; Srinivasan, R. Event-Triggered Controller on Practically Exponential Input-to-State Stabilization of Stochastic Reaction-Diffusion Neural Networks and Its Application to Image Encryption; Springer: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Mirzajani, S.; Aghababa, M.P.; Heydari, A. Adaptive T–S fuzzy control design for fractional-order systems with parametric uncertainty and input constraint. Fuzzy Sets Syst. 2018, 365, 22–39. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Wang, H.; Sun, Y. Adaptive fuzzy control for a class of unknown fractional-order neural networks subject to input nonlinearities and dead-zones. Inf. Sci. 2018, 454–455, 30–45. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X.; Zhang, Z. Adaptive Command Filtered Neuro-Fuzzy Control Design for Fractional-Order Nonlinear Systems with Unknown Control Directions and Input Quantization. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7238–7249. [Google Scholar] [CrossRef]
- Hu, T.; He, Z.; Zhang, X.; Zhong, S. Event-triggered consensus strategy for uncertain topological fractional-order multiagent systems based on Takagi–Sugeno fuzzy models. Inf. Sci. 2021, 551, 304–323. [Google Scholar] [CrossRef]
- Fei, J.; Wang, H.; Fang, Y. Novel neural network fractional-order sliding-mode control with application to active power filter. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 3508–3518. [Google Scholar] [CrossRef]
- Gokulakrishnan, V.; Srinivasan, R.; Syed Ali, M.; Rajchakit, G.; Thakur, G. Novel LMI-based adaptive boundary synchronisation of fractional-order fuzzy reaction–diffusion BAM neural networks with leakage delay. Int. J. Syst. Sci. 2023, 54, 2975–2998. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J.; Wang, H.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef]
- Zhan, Y.; Tong, S. Adaptive fuzzy output-feedback decentralized control for fractional-order nonlinear large-scale systems. IEEE Trans. Cybern. 2021, 52, 12795–12804. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J. Composite learning adaptive dynamic surface control of fractional-order nonlinear systems. IEEE Trans. Cybern. 2019, 50, 2557–2567. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Cui, L.; Liang, M.; Li, J.; Wang, Y. Adaptive Neural Network Control for a Class of Fractional-Order Nonstrict-Feedback Nonlinear Systems with Full-State Constraints and Input Saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6677–6689. [Google Scholar] [CrossRef] [PubMed]
- Shahvali, M.; Azarbahram, A.; Naghibi-Sistani, M.B.; Askari, J. Bipartite consensus control for fractional-order nonlinear multi-agent systems: An output constraint approach. Neurocomputing 2020, 397, 212–223. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Jinde, C.; Arefi, M.M. Neural network controller design for fractional-order systems with input nonlinearities and asymmetric time-varying Pseudo-state constraints. Chaos Solitons Fractals 2021, 144, 110742. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Cao, J.; Arefi, M.M. Adaptive neural output-feedback control for nonstrict-feedback time-delay fractional-order systems with output constraints and actuator nonlinearities. Neural Networks 2018, 105, 256–276. [Google Scholar] [CrossRef]
- Wei, M.; Li, Y.X.; Tong, S. Event-triggered adaptive neural control of fractional-order nonlinear systems with full-state constraints. Neurocomputing 2020, 412, 320–326. [Google Scholar] [CrossRef]
- Zhao, D.; Li, Y.; Li, S.; Cao, Z.; Zhang, C. Distributed Event-Triggered Impulsive Tracking Control for Fractional-Order Multiagent Networks. IEEE Trans. Syst. Man, Cybern. Syst. 2022, 52, 4544–4556. [Google Scholar] [CrossRef]
- Cao, B.; Nie, X. Event-triggered adaptive neural networks control for fractional-order nonstrict-feedback nonlinear systems with unmodeled dynamics and input saturation. Neural Netw. 2021, 142, 288–302. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Xiong, M.; Zhang, B.; Fei, S. Adaptive Event-Triggered Nonfragile State Estimation for Fractional-Order Complex Networked Systems with Cyber Attacks. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 2121–2133. [Google Scholar] [CrossRef]
- You, X.; Shi, M.; Guo, B.; Zhu, Y.; Lai, W.; Dian, S.; Liu, K. Event-triggered adaptive fuzzy tracking control for a class of fractional-order uncertain nonlinear systems with external disturbance. Chaos Solitons Fractals 2022, 161, 112393. [Google Scholar] [CrossRef]
- Shahvali, M.; Naghibi-Sistani, M.B.; Askari, J. Dynamic Event-Triggered Control for a Class of Nonlinear Fractional-Order Systems. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2131–2135. [Google Scholar] [CrossRef]
- Yang, W.; Zheng, W.X.; Yu, W. Observer-Based Event-Triggered Adaptive Fuzzy Control for Fractional-Order Time-Varying Delayed MIMO Systems Against Actuator Faults. IEEE Trans. Fuzzy Syst. 2022, 30, 5445–5459. [Google Scholar] [CrossRef]
- Cheng, H.; Huang, X.; Li, Z. Unified neuroadaptive fault-tolerant control of fractional-order systems with or without state constraints. Neurocomputing 2023, 524, 117–125. [Google Scholar] [CrossRef]
- Li, Y.X.; Wei, M.; Tong, S. Event-Triggered Adaptive Neural Control for Fractional-Order Nonlinear Systems Based on Finite-Time Scheme. IEEE Trans. Cybern. 2021, 52, 9481–9489. [Google Scholar] [CrossRef]
- You, X.; Dian, S.; Liu, K.; Guo, B.; Xiang, G.; Zhu, Y. Command Filter-Based Adaptive Fuzzy Finite-Time Tracking Control for Uncertain Fractional-Order Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2022, 31, 226–240. [Google Scholar] [CrossRef]
- Qu, Y.; Ji, Y. Fractional-order finite-time sliding mode control for uncertain teleoperated cyber–physical system with actuator fault. ISA Trans. 2024, 144, 61–71. [Google Scholar] [CrossRef] [PubMed]
- Palanisamy, G.; Kashkynbayev, A.; Rajan, R. Finite-Time Stability of Fractional-Order Discontinuous Nonlinear Systems with State-Dependent Delayed Impulses. IEEE Trans. Syst. Man, Cybern. Syst. 2024, 54, 1312–1324. [Google Scholar] [CrossRef]
- Kavikumar, R.; Kwon, O.M.; Lee, S.H.; Sakthivel, R. Input-output finite-time IT2 fuzzy dynamic sliding mode control for fractional-order nonlinear systems. Nonlinear Dyn. 2022, 108, 3745–3760. [Google Scholar] [CrossRef]
- Xue, G.; Lin, F.; Li, S.; Liu, H. Adaptive fuzzy finite-time backstepping control of fractional-order nonlinear systems with actuator faults via command-filtering and sliding mode technique. Inf. Sci. 2022, 600, 189–208. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic press: Cambridge, MA, USA, 1999; p. 2. [Google Scholar]
- Das, S. Functional Fractional Calculus for System Identification and Controls; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Wang, H.; Chen, B.; Liu, X.; Liu, K.; Lin, C. Robust Adaptive Fuzzy Tracking Control for Pure-Feedback Stochastic Nonlinear Systems with Input Constraints. IEEE Trans. Cybern. 2013, 43, 2093–2104. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Dong, W.; Lin, C. Command Filtering-Based Fuzzy Control for Nonlinear Systems with Saturation Input. IEEE Trans. Cybern. 2017, 47, 2472–2479. [Google Scholar] [CrossRef]
- Beckenbach, E.F.; Bellman, R. Inequalities; Cambridge University Press: Cambridge, UK, 1952. [Google Scholar]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive Neural Control for Output Feedback Nonlinear Systems Using a Barrier Lyapunov Function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar] [PubMed]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov Functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Wang, L.X. Adaptive Fuzzy Systems and Control: Design and Stability Analysis; Prentice-Hall: Englewood Cliffs, NJ, USA, 1994. [Google Scholar]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Aguila Camacho, N.; Duarte Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Chen, W.; Dai, H.; Song, Y.; Zhang, Z. Convex Lyapunov functions for stability analysis of fractional order systems. IET Control Theory Appl. 2017, 11, 1070–1074. [Google Scholar] [CrossRef]
- Peng, X.; Wu, H.; Cao, J. Global Nonfragile Synchronization in Finite Time for Fractional-Order Discontinuous Neural Networks with Nonlinear Growth Activations. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2123–2137. [Google Scholar] [CrossRef]
- Polycarpou, M.M. Stable adaptive neural control scheme for nonlinear systems. IEEE Trans. Autom. Control 1996, 41, 447–451. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Li, W.; Liang, M. Event-Triggered Adaptive Fuzzy Control for Strict-Feedback Nonlinear FOSs Subjected to Finite-Time Full-State Constraints. Fractal Fract. 2024, 8, 160. https://doi.org/10.3390/fractalfract8030160
Wang C, Li W, Liang M. Event-Triggered Adaptive Fuzzy Control for Strict-Feedback Nonlinear FOSs Subjected to Finite-Time Full-State Constraints. Fractal and Fractional. 2024; 8(3):160. https://doi.org/10.3390/fractalfract8030160
Chicago/Turabian StyleWang, Changhui, Wencheng Li, and Mei Liang. 2024. "Event-Triggered Adaptive Fuzzy Control for Strict-Feedback Nonlinear FOSs Subjected to Finite-Time Full-State Constraints" Fractal and Fractional 8, no. 3: 160. https://doi.org/10.3390/fractalfract8030160
APA StyleWang, C., Li, W., & Liang, M. (2024). Event-Triggered Adaptive Fuzzy Control for Strict-Feedback Nonlinear FOSs Subjected to Finite-Time Full-State Constraints. Fractal and Fractional, 8(3), 160. https://doi.org/10.3390/fractalfract8030160