

A Discrete-Time Fractional-Order Flocking Control Algorithm of Multi-Agent Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- A discrete-time multi-agent flocking control algorithm was derived based on Grünwald-Letnikov (G-L) fractional derivatives. Compared with existing flocking methods where only integer-order dynamics are considered, our algorithm allows agents to use historical information, which means that the current states of the agents depend on both recent and historical values. Thus, our method conforms more with the reality that individuals always exhibit a time-dependent memory effect in nature;
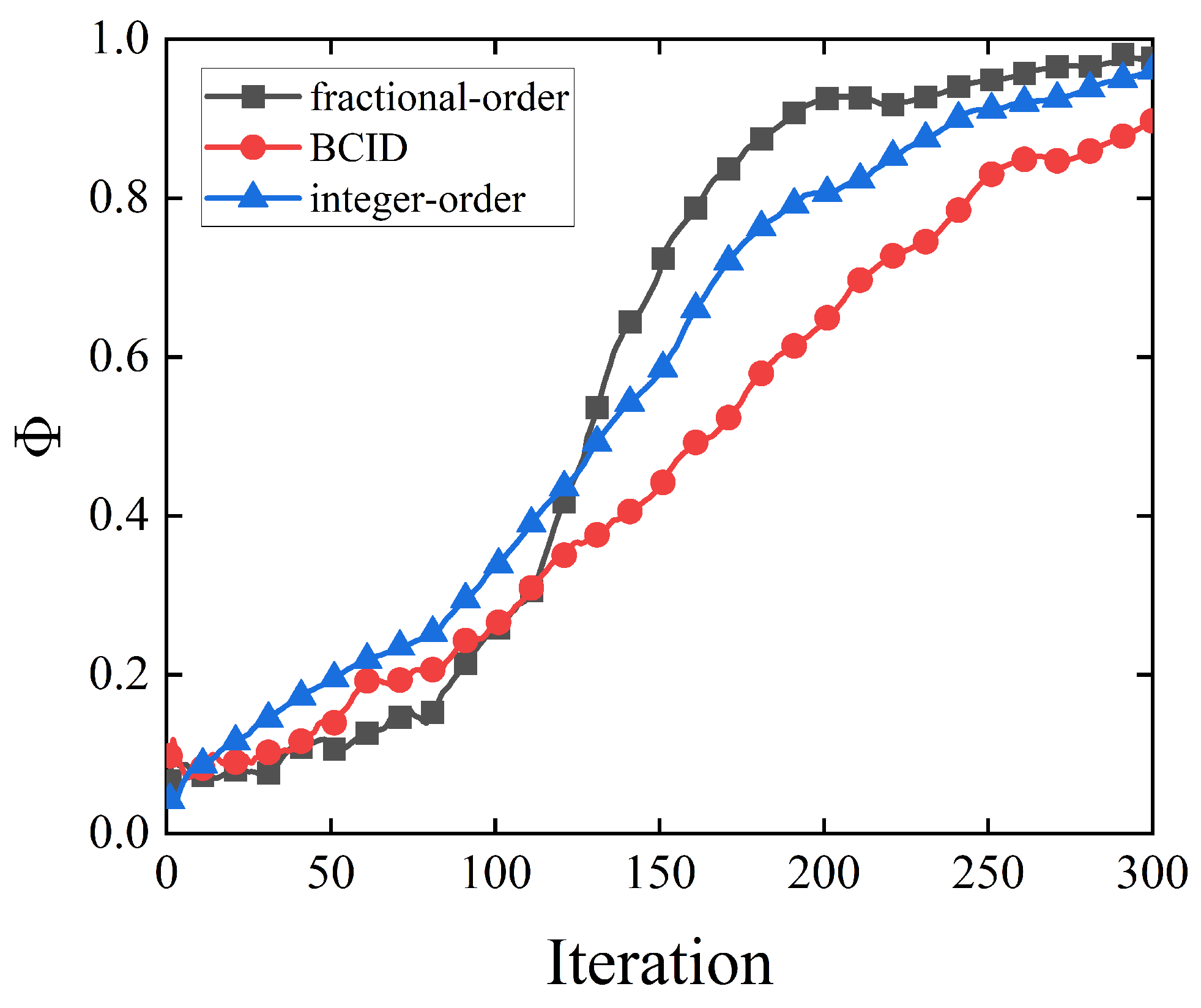
- Compared with existing research [18] where only the leaderless condition is taken into account, this paper investigates the fractional-order flocking control of multi-agent systems under the leader-following strategy. Based on the Lyapunov stability theory, the convergence of this algorithm is proven. Experimental results demonstrate that the proposed algorithm achieves consensus among agents and effectively improves the convergence rate.
2. Preliminaries
2.1. Graph Theory
2.2. Fractional Derivative
3. The Proposed Flocking Control Method
3.1. Dynamics Model of Multi-Agent Systems
3.2. Control Protocol of the Agents
- 1.
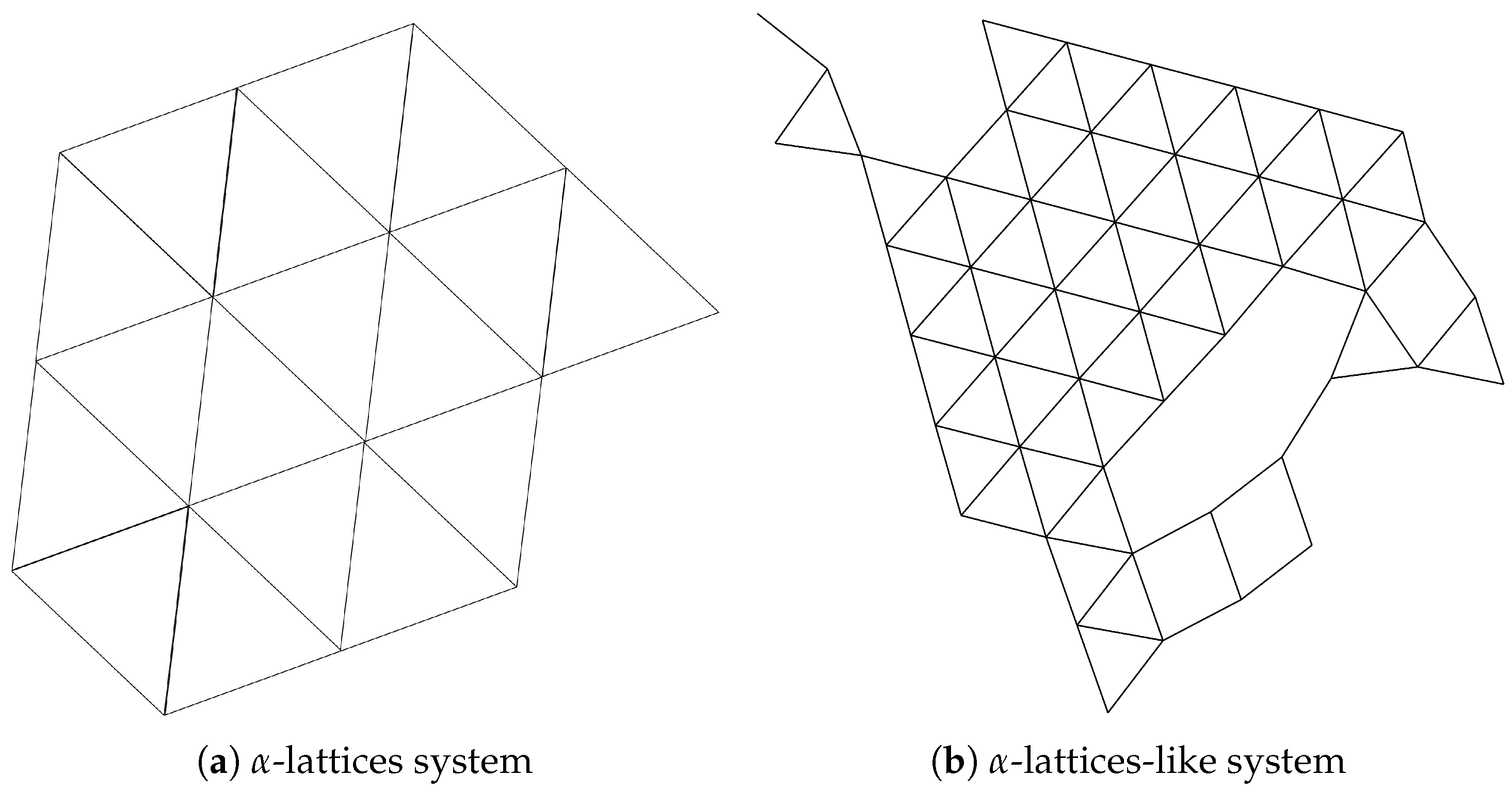
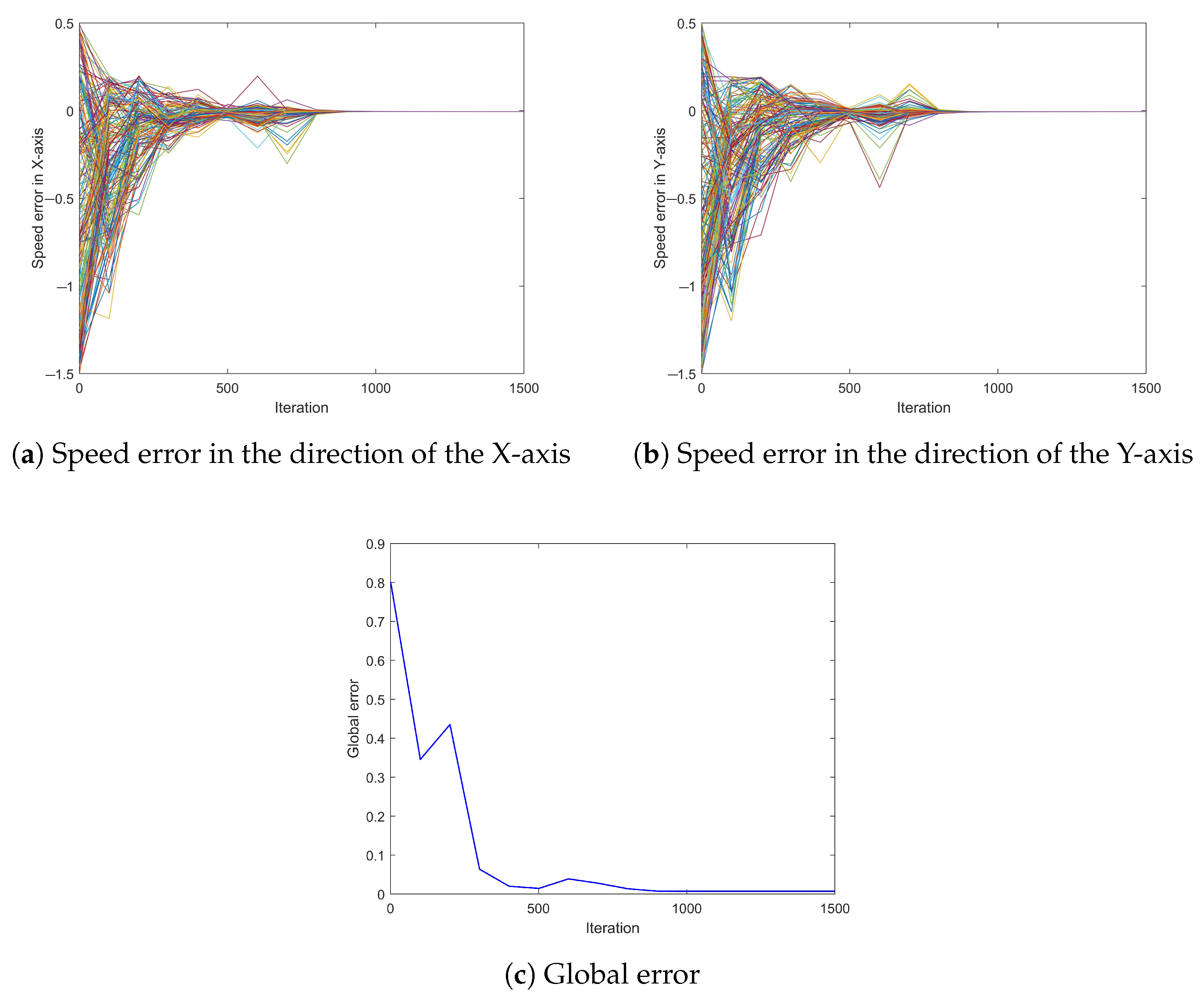
- The system will be asymptotic stable, and the agents’ positions will eventually tend to lattices;
- 2.
- The speed of all agents will tend towards the virtual leader;
- 3.
- There will be no collisions among the agents.
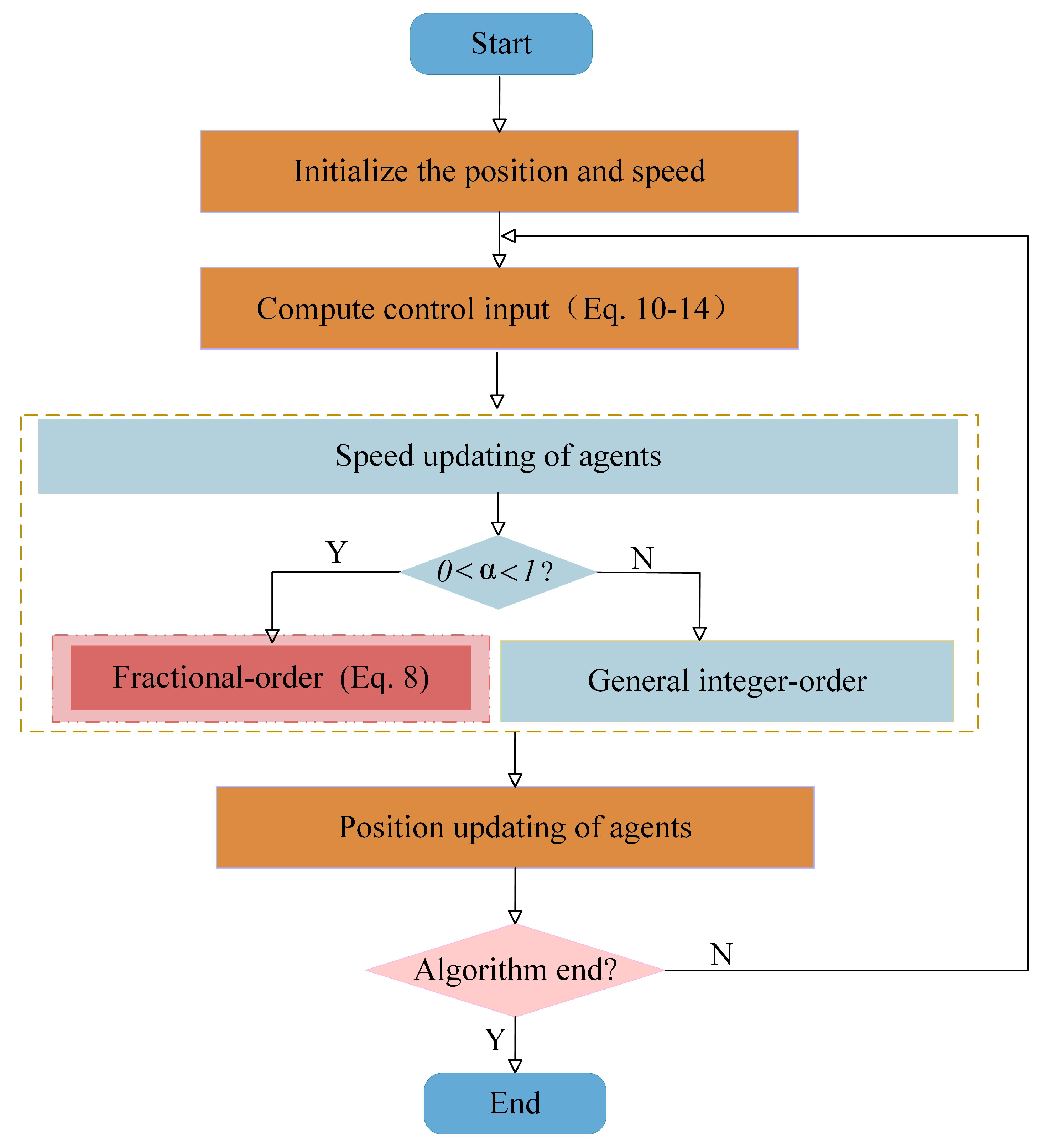
3.3. Flow Chart of Our Proposed Algorithm
4. Simulation Results
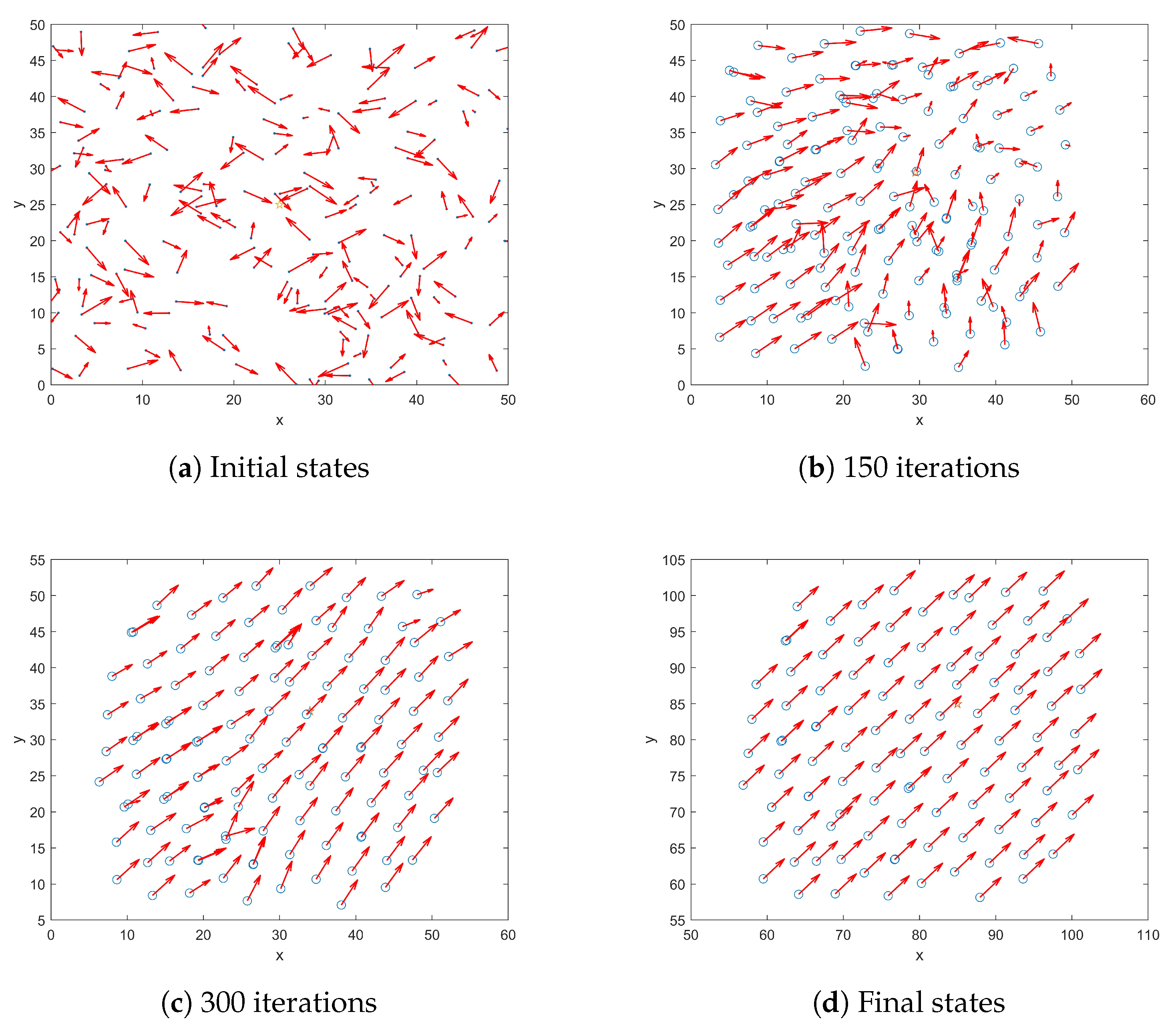
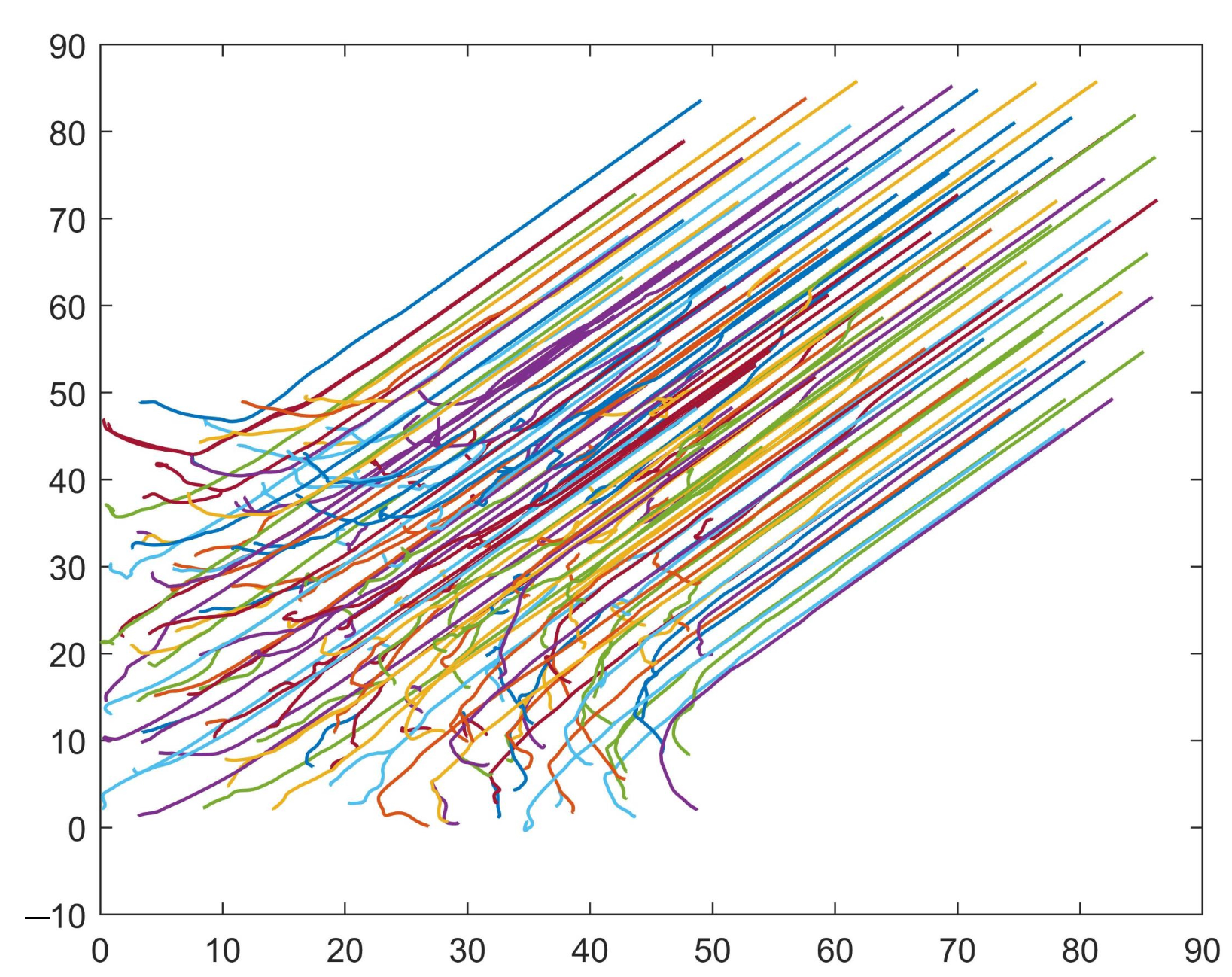
4.1. Tests of the Fractional-Order Flocking Control Algorithm
4.2. Performance Test
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Parivallal, A.; Sakthivel, R.; Amsaveni, R.; Alzahrani, F.; Alshomrani, A.S. Observer-based memory consensus for nonlinear multi-agent systems with output quantization and Markov switching topologies. Phys. A 2020, 551, 123949. [Google Scholar] [CrossRef]
- Amirkhani, A.; Barshooi, A.H. Consensus in multi-agent systems: A review. Artif. Intell. Rev. 2022, 55, 3897–3935. [Google Scholar] [CrossRef]
- Beaver, L.E.; Malikopoulos, A.A. An overview on optimal flocking. Annu. Rev. Control. 2021, 51, 88–99. [Google Scholar] [CrossRef]
- Berlinger, F.; Gauci, M.; Nagpal, R. Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm. Sci. Robot. 2021, 6, eabd8668. [Google Scholar] [CrossRef] [PubMed]
- Ling, H.J.; Mclvor, G.E.; Westley, J.; van der Vaart, K.; Vaughan, R.T.; Thornton, A.; Ouellette, N.T. Behavioural plasticity and the transition to order in jackdaw flocks. Nat. Commun. 2019, 10, 5174. [Google Scholar] [CrossRef] [PubMed]
- Mayor, R.; Etienne-Manneville, S. The front and rear of collective cell migration. Nat. Rev. Mol. Cell Biol. 2016, 17, 97–109. [Google Scholar] [CrossRef] [PubMed]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. Comput. Graph. 1987, 21, 25–34. [Google Scholar] [CrossRef]
- Vicsek, T.; Czirok, A.; Benjacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control. 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Jia, Y.N.; Vicsek, T. Modelling hierarchical flocking. New J. Phys. 2019, 21, 093048. [Google Scholar] [CrossRef]
- Zou, Y.; An, Q.; Miao, S.X.; Chen, S.M.; Wang, X.M.; Su, H.S. Flocking of uncertain nonlinear multi-agent systems via distributed adaptive event-triggered control. Neurocomputing 2021, 465, 503–513. [Google Scholar] [CrossRef]
- Yan, T.R.; Xu, X.; Li, Z.Y.; Li, E.R. Flocking of multi-agent systems with unknown nonlinear dynamics and heterogeneous virtual leader. Int. J. Control Autom. Syst. 2021, 19, 2931–2939. [Google Scholar] [CrossRef]
- Carrillo, J.A.; Kalise, D.; Rossi, F.; Trelat, E. Controlling swarms towards flocks and mills. SIAM J. Control Optim. 2022, 60, 1863–1891. [Google Scholar] [CrossRef]
- Wang, X.M.; Sun, J.S.; Wu, Z.X.; Li, Z.T. Robust integral of sign of error-based distributed flocking control of double-integrator multi-agent systems with a varying virtual leader. Int. J. Robust Nonlinear Control. 2022, 32, 286–303. [Google Scholar] [CrossRef]
- Chen, W.; Hu, S.; Cai, W. A causal fractional derivative model for acoustic wave propagation in lossy media. Arch. Appl. Mech. 2016, 86, 529–539. [Google Scholar] [CrossRef]
- Pandey, V.; Holm, S. Connecting the grain-shearing mechanism of wave propagation in marine sediments to fractional order wave equations. J. Acoust. Soc. Am. 2016, 140, 4225–4236. [Google Scholar] [CrossRef] [PubMed]
- Cui, Y.B.; Hu, W.; Rahmani, A. Fractional-order artificial bee colony algorithm with application in robot path planning. Eur. J. Oper. Res. 2023, 306, 47–64. [Google Scholar] [CrossRef]
- Chen, H.T.; He, M.; Liu, J.T.; Xu, P.; Cao, X.H.; Han, W.; Yuan, G.D. A novel fractional-order flocking algorithm for large-scale UAV swarms. Complex Intell. Syst. 2023, 9, 6831–6844. [Google Scholar] [CrossRef]
- Kozlovsky, Y.; Cohen, I.; Golding, I.; Ben-Jacob, E. Lubricating bacteria model for branching growth of bacterial colonies. Phys. Rev. E 1999, 59, 7025–7035. [Google Scholar] [CrossRef]
- Teodoro, G.S.; Machado, J.A.T.; de Oliveira, E.C. A review of definitions of fractional derivatives and other operators. J. Comput. Phys. 2019, 388, 195–208. [Google Scholar] [CrossRef]
- Wu, J.H.; Yu, Y.Z.; Ma, J.; Wu, J.S.; Han, G.J.; Shi, J.L.; Gao, L.J. Autonomous cooperative flocking for heterogeneous unmanned aerial vehicle group. IEEE Trans. Veh. Technol. 2021, 70, 12477–12490. [Google Scholar] [CrossRef]
- Fu, X.W.; Pan, J.; Wang, H.X.; Gao, X.G. A formation maintenance and reconstruction method of UAV swarm based on distributed control. Aerosp. Sci. Technol. 2020, 104, 105981. [Google Scholar] [CrossRef]
- Zohdi, T.I. Multiple UAVs for mapping: A review of basic modeling, simulation, and applications. Annu. Rev. Environ. Resour. 2018, 43, 523–543. [Google Scholar] [CrossRef]
- Su, H.S.; Wang, X.F.; Lin, Z.L. Flocking of multi-agents with a virtual leader. IEEE Trans. Autom. Control. 2009, 54, 293–307. [Google Scholar] [CrossRef]
- Liu, J.T.; Wu, Z.H.; Xin, Q.; Yu, M.G.; Liu, L.L. Topology uniformity pinning control for multi-agent flocking. Complex Intell. Syst. 2023. Available online: https://link.springer.com/article/10.1007/s40747-023-01253-7 (accessed on 19 October 2023). [CrossRef]
- Cavagna, A.; Giardina, I. Bird flocks as condensed matter. Annu. Rev. Condens. Matter Phys. 2014, 5, 183–207. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; He, M.; Han, W.; Liu, S.; Wei, C. A Discrete-Time Fractional-Order Flocking Control Algorithm of Multi-Agent Systems. Fractal Fract. 2024, 8, 85. https://doi.org/10.3390/fractalfract8020085
Chen H, He M, Han W, Liu S, Wei C. A Discrete-Time Fractional-Order Flocking Control Algorithm of Multi-Agent Systems. Fractal and Fractional. 2024; 8(2):85. https://doi.org/10.3390/fractalfract8020085
Chicago/Turabian StyleChen, Haotian, Ming He, Wei Han, Sicong Liu, and Chenyue Wei. 2024. "A Discrete-Time Fractional-Order Flocking Control Algorithm of Multi-Agent Systems" Fractal and Fractional 8, no. 2: 85. https://doi.org/10.3390/fractalfract8020085
APA StyleChen, H., He, M., Han, W., Liu, S., & Wei, C. (2024). A Discrete-Time Fractional-Order Flocking Control Algorithm of Multi-Agent Systems. Fractal and Fractional, 8(2), 85. https://doi.org/10.3390/fractalfract8020085