1. Introduction
In the qualitative analysis of solutions of differential and difference equations, oscillation is a hot topic. An equation is oscillatory if all its solutions are neither positive nor negative eventually. The oscillatory theory of differential and difference equations has extensive applications in control, ecology, economics, biology, life sciences, engineering, and many other fields. In the last few decades, there have been rich research results on oscillation in the literature. The main approaches for studying oscillation are the Riccati transformation and the integral average technique. In the early research, the studied differential equations were mainly of low order with simple forms (for example, see [
1,
2], and the references therein). Later, the research of oscillation was extended to other differential equations with complex forms, such as differential equations with a neutral form [
3,
4], or with distributed deviating arguments [
5], or with a delay term [
6], or with a damping term [
7]. At the same time, research into oscillation was extended to various difference equations by many authors, for example, difference equations with retarded arguments [
8], linear and half-linear difference equations [
9], advanced difference equations [
10], and so on.
With the increasing application of fractional derivatives and fractional differential equations in various fields, recently, many authors have paid much attention to the research into the oscillation of fractional differential equations [
11], fractional difference equations [
12], and q-fractional difference equations [
13].
In [
14], Hilger proposed the concept of time scale, which is desired to unify continuous and discrete analysis. Since then, the oscillation of dynamic equations on time scales has been given much attention by many authors, and a lot of valuable oscillation criteria have been established for various dynamic equations on time scales. The main approaches for studying oscillation for dynamic equations on time scales in most research are still the Riccati transformation and the integral average technique together with the theory of time scale, and the research contents are roughly divided into two directions. One is that the orders of a dynamic equation were from a lower order [
15,
16,
17] to higher order [
18,
19,
20,
21,
22]. The other is that the forms of dynamic equations appear different, for example, superlinear and sublinear dynamic equations [
16], functional dynamic equations [
18,
19], and dynamic equations with a neutral term [
20,
23].
Delay dynamics is a theory that studies the delay effect in dynamical systems. The application of delayed dynamics is very extensive. For example, studying the delayed effects of signal transmission between neurons in neuroscience can help us better understand the function of the nervous system and disease control. Studying the delayed effects in the food chain in ecology can help us better protect the stability of ecosystems. In the current research on the oscillation of delay dynamic equations on time scales, most of the existing results are related to linear, half-linear, and quasi-linear delay dynamic equations, while little research is related to super-linear delay dynamic equations due to the complexity of the analysis process. In [
24], Grace et al. researched a class of delay second-order dynamic equations on time scales with a super-linear neutral term, and based on some certain inequalities, Riccati functions, and the
integral technique, they established some new oscillation criteria, including Kamenev and Philos-type oscillation criteria for the equation. In this research, we notice that very few authors have paid attention to delay dynamic equations on time scales involving local fractional derivative with a super-linear neutral term so far in the literature.
Motivated by the above analysis, in this paper, we research the oscillation of a class of nonlinear third-order delay dynamic equations on time scales involving a local fractional derivative with a super-linear neutral term denoted as follows:
and another class of nonlinear third-order delay dynamic equations involving a local fractional derivative with a super-linear neutral term and a damping term as follows:
where
is an arbitrary time scale,
is the local fractional operator of
order,
w is the unknown function,
are the ratios of two positive odd integers satisfying
, and
,
,
. Assume
are increasing delay functions, and
,
.
The delay dynamic equations denoted by (1) and (2) have a wide range of applications in the fields of dynamics and thermodynamics in physics research. They can fully consider the historical changes of the research object and the impact of the current state on future state changes. By studying its qualitative properties such as oscillation and stability, they can more deeply and accurately grasp and control the current state of the physics research object.
Definition 1. A function is regressive provided , where , . The set of rd-continuous functions is denoted by , and the set of all regressive and rd-continuous functions is denoted by , while .
For more details on the theory of time scales, we refer the readers to [25,26]. Definition 2 ([
27])
. For , , the local fractional derivative of θ order for a function is defined by satisfyingwhere is a neighborhood of x. Remark 1. The local fractional derivative defined on an arbitrary time scale in Definition 2 unifies the continuous and discrete case; that is, if or , then becomes the fractional derivative on the set of real numbers and the set of integers, respectively. The latter can be denoted by the fractional difference operator .
According to Definition 2, if
x is right-scattered, then one has
, while
if
x is right-dense. So,
. By use of this relationship, (1) and (2) can be diverted to the following equations:
and
where
, and
.
Define
, and
. In the following analysis, we always assume
m is nondecreasing, and
Set
. Then, (4) and (5) can be converted into the following forms
The rest of this paper is organized as follows. In
Section 1, we present some new oscillation results for Equation (
1) (or its equivalent form Equation (
3)). Then, in
Section 2, we extend the deduction process and establish some new oscillation criteria to Equation (
2) (or its equivalent form Equation (
4)). Some examples are presented in
Section 3 for applying the established oscillation criteria. At last, we give some concluding comments. Throughout the paper,
.
2. Oscillation Results for Equation (1)
In this section, as Equation (
1) is equivalent to (3), we only need to research the oscillation of Equation (
3). First, we give some lemmas.
Lemma 1. Assume Equation (3) has an eventually positive solution , satisfying on , where and . Ifthen it holds that . There exists such that on .
. We suppose an arbitrary such that on , where , and c is an arbitrary positive constant. If it further satisfies thatthen either on or , where is sufficiently large. Proof. : As
is positive on
, one has
, and
So,
is strictly decreasing on
, which implies the sign of
does not change eventually. Here, we conclude
on
for some sufficiently
. If not, we can find
satisfying
. So,
is strictly decreasing on
, and
By (8), one can deduce that
. So, we can find
such that
on
, and
By (9), we can obtain
, which is a contradiction. So,
on
. The proof is complete.
: By
, one has
. So
According to , as on , one can conclude the sign of does not change eventually. Thus, we can find satisfying either or for .
If
, then
is strictly decreasing. Since
, we deduce that
and
. Here, we conclude
. If not, we can find
satisfying
for
, and
where the first equality of (5) is used in the last inequality. So,
From (3) and (6), one has
After taking the
integral on both sides of (13), from
x to
∞, one can deduce that
which implies
Replacing
x with
in (14), taking the
integral on both sides of (14) yields
which is followed by
Replacing
x with
in (15), taking the
integral on both sides of (15) yields
Due to (10), one has
which is a contradiction. So, it holds that
and
. We have finished the proof. □
Lemma 2. If is an eventually positive solution of Equation (3) satisfyingthen it holds thatand Proof. According to Lemma 1, there exists
such that
and decreasing on
,
and increasing on
. So, one has
and
Furthermore,
From above, the desired results can be obtained. □
Theorem 1. Under the conditions of (8)–(10), if, for an arbitrary , it holds thatwhere η is one known nonnegative function,and c is an arbitrary positive constant, then the solution of Equation (3) is oscillatory or satisfies . Proof. Suppose
is a non-oscillatory solution of Equation (
3). We may assume
on
without loss of generality, where
. According to Lemma 1, we can find a sufficiently large
such that
is positive and decreasing on
, and either
or
.
It is enough to consider the case . In this case, is increasing on . Then, there exists a positive constant such that on .
On the other hand,
Combining with (18) and the second equality of (5), one can deduce that for some sufficiently large
, it holds that
By the use of (3) and (6), combined with
, one can deduce that
Now, we construct a Riccati function with definition
Then,
according to Lemma 1
, and
where
and
are used in the last step.
By (17) in Lemma 2, one has
So, we can deduce that
Replacing
x with
t in (21), taking the
integral on both sides of (21) yields
So,
which contradicts (19). We have finished the proof. □
Theorem 2. Under the conditions of (8)–(10), furthermore, suppose for an arbitrary and , it holds that , where c is an arbitrary constant, and is defined as in Theorem 1. Ifthen the solution of Equation (3) is oscillatory or satisfies . Proof. Suppose
is a non-oscillatory solution of Equation (
3). Similar to the first two paragraphs in Theorem 1, all that is left is to consider the case
, and one can further obtain that
where
is sufficiently large.
By taking the
integral on both sides of (23), one can deduce that
which implies
Furthermore,
which is followed by
Moreover,
On the other hand, by (18) in Lemma 2, one has
Equations (26) and (27) lead to a contradiction with (22). So, the proof is complete. □
Next we establish the Kamenev and Philos-type oscillation criteria for Equation (
3). To this end, define
, and
satisfying
Theorem 3. Under the conditions of (8)–(10), if, for an arbitrary , it holds thatwhere are defined as in Theorem 1; then, the solution of Equation (3) is oscillatory or satisfies . Proof. Suppose
is a non-oscillatory solution of Equation (
3). Similar to Theorem 1, all that is left is to consider the case
.
Let
be defined as in Theorem 1. Due to (21), one has
So, one has
where the deduction (28) is used. Then,
Moreover,
which leads to a contradiction with (29). By taking
, we have finished the proof. □
In Theorem 3, if we select , or , then we can obtain the following corollary.
Corollary 1. Under the conditions of (8)–(10), if, for an arbitrary , either of the following two conditions holds:
.then the solution of Equation (3) is oscillatory or satisfies . 3. Oscillation Results for Equation (2)
In this section, we research the oscillation of Equation (
2) and extend the main results established in the last section for Equations (
3) and (
4), as Equation (
2) is equivalent to (4). For the sake of convenience, define
.
For
, the exponential function is denoted by
. According to ([
25], Theorems 5.1 and 5.2), it holds that
for
, and
For
, one has
, and one has the following observation
Furthermore, we have the following two lemmas.
Lemma 3. Assume Equation (4) has an eventually positive solution satisfying on , where , and . If , andthen . There exists such that on .
. If, furthermore,where is defined as in Lemma 1 satisfying , then either on or , where is sufficiently large. Lemma 4. If , and is an eventually positive solution to Equation (4) satisfyingthen it holds thatand The proofs of Lemmas 3 and 4 are similar to those of Lemmas 1 and 2. So, we omitted them here.
Theorem 4. Under the conditions of (33)–(35), if , and for an arbitrary , it holds thatwhere are defined as in Theorem 1, then the solution of Equation (4) is oscillatory or satisfies . Proof. Suppose
is a non-oscillatory solution of Equation (
3), and assume
on
without loss of generality. Furthermore, there exists
such that
is positive and decreasing on
, and either
or
.
If
, there exists
such that
on
, and similar to Theorem 1,
. Furthermore, one can deduce that
Let
Following a similar process to that of Theorem 1, one can obtain that
Moreover,
which is a contradiction of (38). Then, the proof is complete. □
Similar to Theorems 2 and 3, we can obtain the following two theorems.
Theorem 5. Assume . Under the conditions of (8)–(10), furthermore, suppose for an arbitrary and , it holds that , where c is an arbitrary constant, and is defined as in Theorem 1. Ifthen the solution of Equation (4) is oscillatory or satisfies . Theorem 6. Under the conditions of (33)–(35), if , and for an arbitrary , it holds thatwhere is defined as in Theorem 3, then the solution of Equation (4) is oscillatory or satisfies . Remark 2. We will make a comparison between our results and the existing results. Firstly, the critically used Riccati transformation function denoted by in the last two sections is designed to be adapted to certain delay dynamic equations of fractional order, which is different from [15,16,17,18,19,20,21,22,23]. As a result, the oscillation criteria established above are essentially different from those existing results. Secondly, for the research into the oscillation of super-linear dynamic equations, in [24], the authors considered a non-fractional second-order delay dynamic equation on time scales with a super-linear term as follows:We note that the third-order dynamic equations with a super-linear term denoted by Equations (1)–(4) are different from above. In the establishment of Kamenev and Philos-type oscillation criteria in [24], a critic inequality is unsuitably used (see (4.13)–(4.14) in [24]), which leads to the invalidity of part of the oscillation results. In fact, after changing the form of the Riccati functions suitably, corresponding Kamenev and Philos-type oscillation criteria can also be obtained. Moreover, it is worthy of note that these provided results are not only an extension of those in [24] from a second-order case to a third-order case, as the proof processes for the third-order case here are essentially different from those for the second-order case in [24]. And the oscillation criteria described in the theorems above are new results in the literature to the best of our knowledge. 4. Applications
As applications for the oscillation criteria established above, we will propose some examples. For the examples with , we also give the numerical computation results demonstrated in graphics under the given initial value condition. Comparison of the oscillatory behavior between the equation without the damping term and the equation with the damping term are also given in the first two examples.
First, we consider the following nonlinear third-order delay differential equation involving a local fractional derivative with a super-linear neutral term:
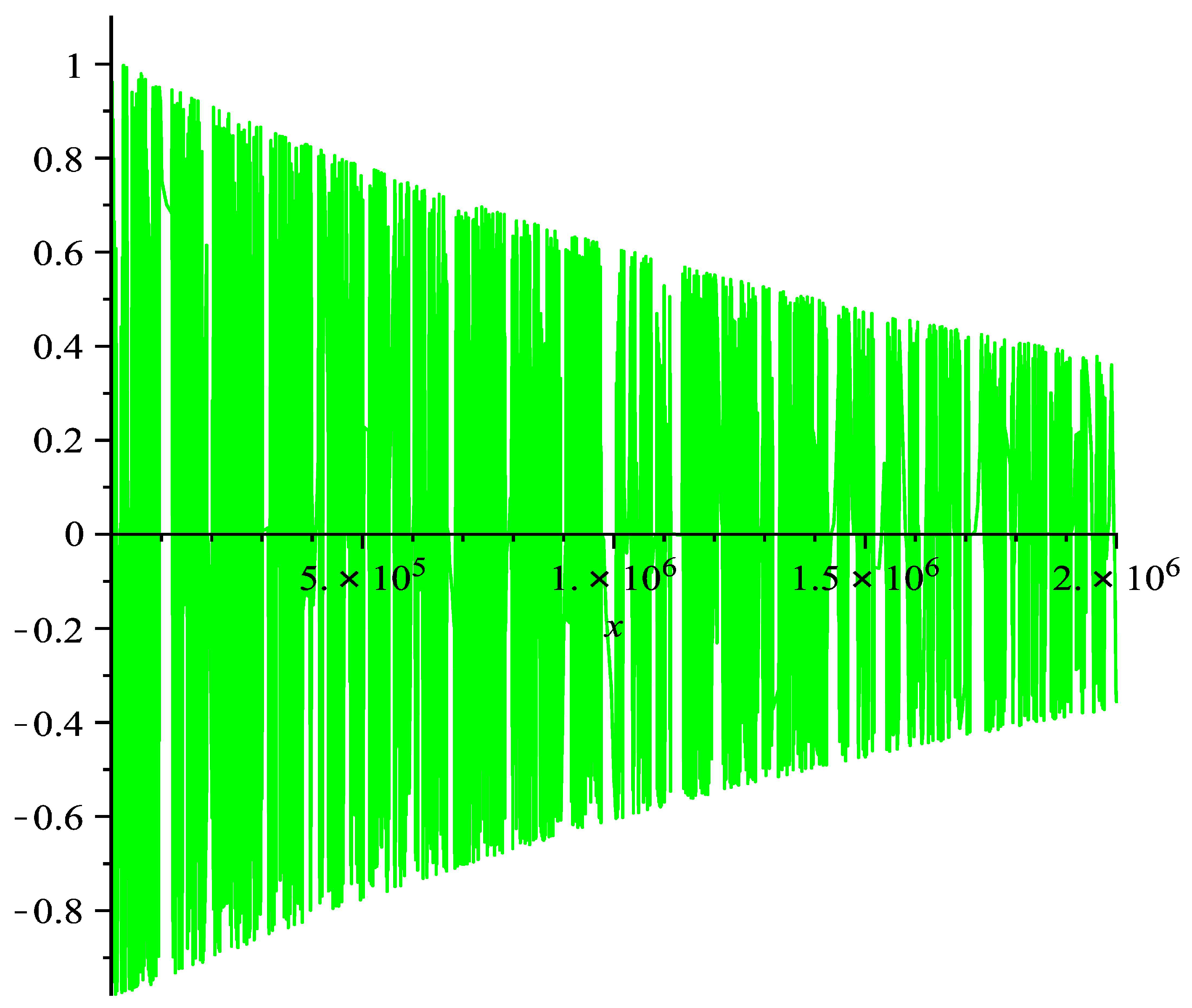
Example 1. Compared with (1) and (3), one has Then, one can see (8) and (9) hold from the following analysis:andFurthermore, as , one can find a sufficiently large such that . Then, one haswhich shows that (10) is satisfied. Moreover, as , according to the definition of in Theorem 1, one haswhere are constants related to . Then, we can find a sufficiently large satisfying and on . Select , and then, one hasIf is selected as sufficiently large, then one can see the above integral tends to infinity when x tends to infinity. So, (19) is also satisfied in the case of . Due to Theorem 1, one can deduce that the solution of Equation (43) is oscillatory or satisfies . Now, we consider the numerical computation of (43). Denote the step by h, and . denotes the numerical solution of the unknown function at the point . .
For the general form of (43), one can consider (1) or its equivalent form (3). For the sake of a graphical demonstration, we perform a numerical computation by use of the simple forward Euler method, and one can obtain the following numerical scheme:
As is known, the local truncating error of the scheme is . In order to fulfill the numerical computation, we select the node variable i such that is equivalent to some . So, one has , which implies . For the convenience of computing, one can set , , and for all .
Selecting
and the initial value condition
, we obtain the numerical computation results, which are demonstrated in
Figure 1.
From
Figure 1, one can see that the solution of Equation (
43) is oscillatory if
x is large enough.
Next, we consider the following nonlinear third-order delay differential equation involving a local fractional derivative with a super-linear neutral term and a damping term.
Example 2. Compared with (2) and (4), one has Then, , and . Considering , one has Obviously, , which implies (33) and (34) hold. Aswhere are constants related to , then we can find a sufficiently large such that and on . For the sake of verifying (35), one can see thatwhich tends to infinity when x tends to infinity. So (35) is satisfied. On the other hand, in order to verify (41), one haswhich tends to infinity when x tends to infinity. So, (41) holds. Due to Theorem 5, one can conclude that the solution of Equation (44) is oscillatory or satisfies . Similar to the numerical computation in Example 1, one can select the Euler method to construct a numerical scheme for (44), and the numerical computation results with the initial value condition
are demonstrated in
Figure 2.
Comparing
Figure 1 and
Figure 2, one can see that the damping term can lead to an impact on the oscillatory behavior of the solutions.
Example 3. Next, we consider the following nonlinear third-order delay difference equation involving a local fractional difference with a super-linear neutral term:where is the fractional difference operator of order on . Compared with (1) and (3), one has Then, for (8) and (9), one hasand Furthermore, as , we can find a sufficiently large such that . Then, it holds thatSo (8)–(10) are satisfied. Moreover, asone can deduce that , where are constants related to . Therefore, there exists such that and on . Selecting , one haswhich tends to infinity when x tends to infinity as long as is sufficiently large. So, (19) satisfies in the case . It follows from Theorem 1 that the solution of Equation (45) is oscillatory or satisfies . Example 4. Now, we research the oscillation of the following nonlinear third-order delay local fractional difference equation with a super-linear neutral term:where , is the fractional difference operator of order on . Due to (1) and (3), one has Then, one can easily deduce that (8) and (9) hold. Similar to Example 3, there exists a sufficiently large such that on . So, (10) holds by the following observations:Furthermore, letting , one hasSo,Therefore, there exists such that and on . Under the selection , it holds thatSo, (31) is also satisfied with . Due to Corollary 1, it can be seen that the solution of Equation (46) is oscillatory or satisfies . 

{kind=link}
{kind=link}