
An Implicit Numerical Method for the Riemann–Liouville Distributed-Order Space Fractional Diffusion Equation


Abstract
1. Introduction
2. Preliminaries
- 1.
- ;
- 2.
- ;
- 3.
- for any positive integer N.
3. Numerical Methods
3.1. The Discretisation of Integral Intervals
3.2. The ADIM
4. The Stability and Convergence of the ADIM
| Algorithm 1: Framework of the ADIM for the RLDO-SFDE. |
| Input: Mesh generation |
| The total number of time steps N, the total number of spatial nodes (x-direction) and (y-direction); |
| The partitions of integral intervals and ; |
Output: Numerical solutions
|
| for do |
| for do |
| Compute by the system (27). |
| end for |
| for do |
| Compute by the system (28). |
| end for |
| Obtain numerical solutions . |
| end for |
4.1. Stability
4.2. Convergence
5. Improved Algorithms
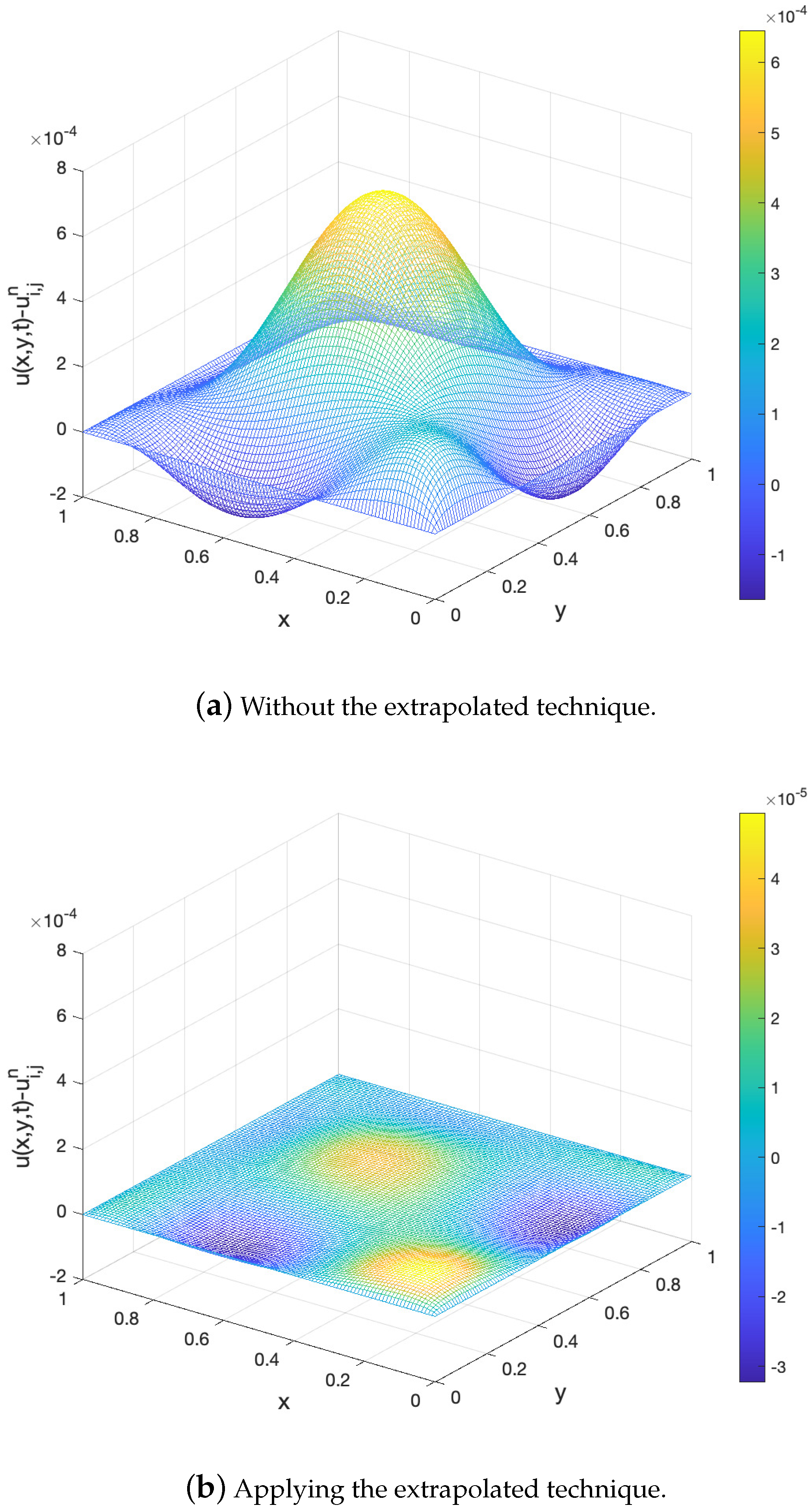
5.1. An Extrapolated Technique
- Employ the ADIM that contains a left-shifted Grünwald–Letnikov approximation to obtain the numerical solutions on the coarse grid .
- Solve Equation (3) by the implicit Euler method on the fine grid ; then, the numerical solutions can be obtained.
- The new extrapolated solutions can be written as:
5.2. A Fast Algorithm for the ADIM
| Algorithm 2: Framework of the fast Bi-CGSTAB iterative method. |
| Input: The eigenvalue vector of the corresponding circulant matrix; |
| The numerical solution at the previous time level ; |
| The right-hand-side vector b; |
Output: Numerical solutions
|
| fordo |
| ; ; |
| ; |
| Compute the product of the circulant matrix C and the vector using Equations (34) and (35); |
| ; ; |
| ; |
| Compute the product of the circulant matrix C and the vector using Equations (34) and (35); |
| ; ; |
| if is accurate enough, then quit; |
| ; |
| end for |
| Obtain numerical solutions . |
6. Numerical Example
7. Conclusions
- The distributed-order operator allows for simulating anomalous diffusion processes exhibiting varying memory effects.
- The ADIM is unconditionally stable and convergent with an accuracy of .
- An extrapolated scheme maintains the higher-order accuracy of the implicit numerical method.
- The fast Bi-CGSTAB method shows excellent performance in reducing computational costs.
- This research may offer more insights into the application of fractional calculus and numerical techniques for solving fractional systems.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Chen, T.; Wang, D. Combined application of blockchain technology in fractional calculus model of supply chain financial system. Chaos Solitons Fractals 2020, 131, 109461. [Google Scholar] [CrossRef]
- Liu, Z.; Xia, T.; Wang, T. Dynamic analysis of fractional-order six-order discrete chaotic mapping and its application in information security. Optik 2023, 272, 170356. [Google Scholar] [CrossRef]
- Peng, W.; Chen, L.; Tianhu, H.E. A modified fractional-order thermo-viscoelastic model and its application to a polymer micro-rod heated by a moving heat source. Appl. Math. Mech. 2022, 43, 507–522. [Google Scholar] [CrossRef]
- Yang, Q.; Chen, D.; Zhao, T.; Chen, Y. Fractional Calculus in Image Processing: A Review. Fract. Calc. Appl. Anal. 2016, 19, 1222–1249. [Google Scholar] [CrossRef]
- Guo, L.; Zhao, X.L.; Gu, X.M.; Zhao, Y.L.; Zheng, Y.B.; Huang, T.Z. Three-dimensional fractional total variation regularized tensor optimized model for image deblurring. Appl. Math. Comput. 2021, 404, 126224. [Google Scholar] [CrossRef]
- Sabermahani, S.; Ordokhani, Y.; Rahimkhani, P. Application of generalized Lucas wavelet method for solving nonlinear fractal-fractional optimal control problems. Chaos Solitons Fractals 2023, 170, 113348. [Google Scholar] [CrossRef]
- Liu, X.; Gan, H.; Luo, Y.; Chen, Y.; Gao, L. Digital-Twin-Based Real-Time Optimization for a Fractional Order Controller for Industrial Robots. Fractal Fract. 2023, 7, 167. [Google Scholar] [CrossRef]
- Kamran; Irfan, M.; Alotaibi, F.M.; Haque, S.; Mlaiki, N.; Shah, K. RBF-Based Local Meshless Method for Fractional Diffusion Equations. Fractal Fract. 2023, 7, 143. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, F.; Turner, I.W.; Anh, V.V.; Feng, L. A finite volume method for the two-dimensional time and space variable-order fractional Bloch-Torrey equation with variable coefficients on irregular domains. Comput. Math. Appl. 2021, 98, 81–98. [Google Scholar] [CrossRef]
- Ding, W.; Patnaik, S.; Sidhardh, S.; Semperlotti, F. Applications of distributed-order fractional operators: A review. Entropy 2021, 23, 110. [Google Scholar] [CrossRef] [PubMed]
- Jia, J.; Wang, H. A fast finite difference method for distributed-order space-fractional partial differential equations on convex domains. Comput. Math. Appl. 2018, 75, 2031–2043. [Google Scholar] [CrossRef]
- Zhang, A.; Ganji, R.M.; Jafari, H.; Ncube, M.N.; Agamalieva, L.; Taylor, T. Numerical Solution of Distributed-Order Integro-Differential Equations. Fractals 2022, 30, 2240123. [Google Scholar] [CrossRef]
- Caputo, M. Elasticitá e Dissipazione; Zanichelli: Bologna, Italy, 1969. [Google Scholar]
- Caputo, M. Mean fractional-order-derivatives differential equations and filters. Annali dell’Universitá Di Ferrara 1995, 41, 73–84. [Google Scholar] [CrossRef]
- Li, Z.; Fujishiro, K.; Li, G. Uniqueness in the inversion of distributed orders in ultraslow diffusion equations. J. Comput. Appl. Math. 2020, 369, 112564. [Google Scholar] [CrossRef]
- Ye, H.; Liu, F.; Anh, V. Compact difference scheme for distributed-order time-fractional diffusion-wave equation on bounded domains. J. Comput. Phys. 2015, 298, 652–660. [Google Scholar] [CrossRef]
- Lorenzo, C.F.; Hartley, T.T. Variable order and distributed order fractional operators. Nonlinear Dyn. 2002, 29, 57–98. [Google Scholar] [CrossRef]
- Caputo, M. Diffusion with space memory modelled with distributed order space fractional differential equations. Ann. Geophys. 2003, 46, 223–234. [Google Scholar] [CrossRef]
- Pourbabaee, M.; Saadatmandi, A. A novel Legendre operational matrix for distributed order fractional differential equations. Appl. Math. Comput. 2019, 361, 215–231. [Google Scholar] [CrossRef]
- Abdelkawy, M.A.; Babatin, M.M.; Lopes, A.M. Highly accurate technique for solving distributed-order time-fractional-sub-diffusion equations of fourth order. Comput. Appl. Math. 2020, 39, 1–22. [Google Scholar] [CrossRef]
- Abbaszadeh, M.; Dehghan, M. Numerical investigation of reproducing kernel particle Galerkin method for solving fractional modified distributed-order anomalous sub-diffusion equation with error estimation. Appl. Math. Comput. 2021, 392, 125718. [Google Scholar] [CrossRef]
- Chou, L.K.; Lei, S.L. Finite volume approximation with ADI scheme and low-rank solver for high dimensional spatial distributed-order fractional diffusion equations. Comput. Math. Appl. 2021, 89, 116–126. [Google Scholar] [CrossRef]
- Bu, W.; Ji, L.; Tang, Y.; Zhou, J. Space-time finite element method for the distributed-order time fractional reaction diffusion equations. Appl. Numer. Math. 2020, 152, 446–465. [Google Scholar] [CrossRef]
- Meerschaert, M.M.; Scheffler, H.P.; Tadjeran, C. Finite difference methods for two-dimensional fractional dispersion equation. J. Comput. Phys. 2006, 211, 249–261. [Google Scholar] [CrossRef]
- Peaceman, D.W.; Rachford, H.H., Jr. The Numerical Solution of Parabolic and Elliptic Differential Equations. J. Soc. Ind. Appl. Math. 1955, 3, 28–41. [Google Scholar] [CrossRef]
- Yu, Q.; Liu, F.; Turner, I.; Burrage, K. A computationally effective alternating direction method for the space and time fractional Bloch–Torrey equation in 3-D. Appl. Math. Comput. 2012, 219, 4082–4095. [Google Scholar] [CrossRef]
- Chen, R.; Liu, F.; Anh, V. A fractional alternating-direction implicit method for a multi-term time–space fractional Bloch–Torrey equations in three dimensions. Comput. Math. Appl. 2019, 78, 1261–1273. [Google Scholar] [CrossRef]
- Liu, F.; Zhuang, P.; Liu, Q. Numerical Methods of Fractional Partial Differential Equations and Applications; Science Press: Beijing, China, 2015. [Google Scholar]
- Zlatev, Z.; Dimov, I.; Faragó, I.; Georgiev, K.; Havasi, Á.; Ostromsky, T. Application of Richardson extrapolation for multi-dimensional advection equations. Comput. Math. Appl. 2014, 67, 2279–2293. [Google Scholar] [CrossRef]
- Wang, Y.M. A Crank-Nicolson-type compact difference method and its extrapolation for time fractional Cattaneo convection-diffusion equations with smooth solutions. Numer. Algorithms 2019, 81, 489–527. [Google Scholar] [CrossRef]
- Wang, H.; Wang, K. An O(Nlog2N) alternating-direction finite difference method for two-dimensional fractional diffusion equations. J. Comput. Phys. 2011, 230, 7830–7839. [Google Scholar] [CrossRef]
- Fu, H.; Ng, M.K.; Wang, H. A divide-and-conquer fast finite difference method for space–time fractional partial differential equation. Comput. Math. Appl. 2017, 73, 1233–1242. [Google Scholar] [CrossRef]
- Sun, L.Y.; Fang, Z.W.; Lei, S.L.; Sun, H.W.; Zhang, J.L. A fast algorithm for two-dimensional distributed-order time-space fractional diffusion equations. Appl. Math. Comput. 2022, 425, 127095. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J. Numerical analysis for distributed-order differential equations. J. Comput. Appl. Math. 2009, 225, 96–104. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J. Analysis of Fractional Differential Equations. J. Math. Anal. Appl. 2002, 265, 229–248. [Google Scholar] [CrossRef]
- Liu, F.; Zhuang, P.; Anh, V.; Turner, I.; Burrage, K. Stability and convergence of the difference methods for the space–time fractional advection–diffusion equation. Appl. Math. Comput. 2007, 191, 12–20. [Google Scholar] [CrossRef]
- Liu, L.; Feng, L.; Xu, Q.; Zheng, L.; Liu, F. Flow and heat transfer of generalized Maxwell fluid over a moving plate with distributed order time fractional constitutive models. Int. Commun. Heat Mass Transf. 2020, 116, 104679. [Google Scholar] [CrossRef]
- Burden, R.L.; Faires, J.D.; Burden, A.M. Numerical Analysis; PWS Publishing Company: Boston, MA, USA, 1985. [Google Scholar]
- Van der Vorst, H.A. Bi-CGSTAB: A Fast and Smoothly Converging Variant of Bi-CG for the Solution of Nonsymmetric Linear Systems. SIAM J. Sci. Stat. Comput. 1992, 13, 631–644. [Google Scholar] [CrossRef]
- Davis, P. Circulant Matrices; Wiley-Intersciences: New York, NY, USA, 1979. [Google Scholar]
- Gray, R.M. Toeplitz and Circulant Matrices: A Review. Found. Trends Commun. Inf. Theory 2006, 2, 155–239. [Google Scholar] [CrossRef]
- Wang, H.; Basu, T.S. A Fast Finite Difference Method for Two-Dimensional Space-Fractional Diffusion Equations. SIAM J. Sci. Comput. 2012, 34, A2444–A2458. [Google Scholar] [CrossRef]
- Youssri, Y.H.; Atta, A.G. Spectral Collocation Approach via Normalized Shifted Jacobi Polynomials for the Nonlinear Lane-Emden Equation with Fractal-Fractional Derivative. Fractal Fract. 2023, 7, 133. [Google Scholar] [CrossRef]


{kind=link}
| Without Extrapolated Technique | Extrapolated Technique | |||
|---|---|---|---|---|
| Error | Order | Error | Order | |
| 1/50 | 1.2000 | - | 1.3159 | - |
| 1/100 | 6.4413 | 0.90 | 4.9333 | 1.42 |
| 1/200 | 3.3766 | 0.93 | 1.5396 | 1.68 |
| 1/400 | 1.7308 | 0.96 | 4.3243 | 1.83 |
| Gauss | Fast Bi-CGSTAB | |||
|---|---|---|---|---|
| Error | Order | Error | Order | |
| 100 | 8.7548 | - | 8.7548 | - |
| 200 | 4.5894 | 0.93 | 4.5901 | 0.93 |
| 400 | 2.3524 | 0.96 | 2.3523 | 0.96 |
| 600 | 1.5817 | 0.98 | 1.5814 | 0.98 |
| Gauss | Bi-CGSTAB | Fast Bi-CGSTAB | |
|---|---|---|---|
| CPU Time | CPU Time | CPU Time | |
| 25 | 0.73 s | 0.75 s | 0.31 s |
| 50 | 2.65 s | 3.03 s | 1.53 s |
| 100 | 11.99 s | 13.84 s | 9.58 s |
| 200 | 89.15 s | 5 min 14 s | 82.63 s |
| 400 | 14 min 54 s | 32 min 39 s | 10 min 52 s |
| 600 | 1 h 6 min 4 s | 3 h 7 min 15 s | 1 h 1 min 12 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Shen, M.; Chen, H. An Implicit Numerical Method for the Riemann–Liouville Distributed-Order Space Fractional Diffusion Equation. Fractal Fract. 2023, 7, 382. https://doi.org/10.3390/fractalfract7050382
Zhang M, Shen M, Chen H. An Implicit Numerical Method for the Riemann–Liouville Distributed-Order Space Fractional Diffusion Equation. Fractal and Fractional. 2023; 7(5):382. https://doi.org/10.3390/fractalfract7050382
Chicago/Turabian StyleZhang, Mengchen, Ming Shen, and Hui Chen. 2023. "An Implicit Numerical Method for the Riemann–Liouville Distributed-Order Space Fractional Diffusion Equation" Fractal and Fractional 7, no. 5: 382. https://doi.org/10.3390/fractalfract7050382
APA StyleZhang, M., Shen, M., & Chen, H. (2023). An Implicit Numerical Method for the Riemann–Liouville Distributed-Order Space Fractional Diffusion Equation. Fractal and Fractional, 7(5), 382. https://doi.org/10.3390/fractalfract7050382