1. Introduction
In recent decades, fractional calculus has been followed with a lot of interest due to its ability as a mathematical tool to describe the memory and hereditary properties of various materials and processes [
1,
2,
3,
4,
5,
6,
7,
8]. The application areas relevant to fractional calculus are very extensive, including the viscoelastic constitutive relationship [
4,
7,
9,
10], anomalous diffusion [
2,
4], vibration and relaxation [
2,
4,
7,
8,
11], control theory [
2,
5], stochastic process [
12], etc. Let us recall the definitions in fractional calculus related to this paper.
Let
be piecewise continuous on
and integrable on any finite subinterval of
. Then, the Riemann–Liouville fractional integral of
of order
is defined as
for
, and
for
, where
is the gamma function. Let
be a positive real number,
,
. Then, the Riemann–Liouville and Caputo fractional derivatives of
of order
are defined as
respectively.
Theoretical analyses and experimental simulations indicated that the stress–strain relationship of a viscoelastic body can be better characterized by using fractional constitutive equations, such as the Scott–Blair model [
4,
9], the Kelvin–Voigt, Maxwell and Zener models [
10,
13,
14,
15] and others [
16,
17,
18]. Thus, dynamics involving a viscoelastic medium with a fractional stress–strain relationship lead to fractional vibration equations or fractional oscillator equations. Different types of fractional vibration equations were presented and analyzed, such as in [
7,
8,
19,
20,
21,
22,
23,
24,
25,
26]. We mention the more general forms known as the multi-term fractional Bessel equations [
27] and the multi-term fractional quasi-Bessel equations [
28], where the existence theory of solutions was constructed in the class of fractional series solutions.
We consider the fractional vibration equation in the form
where the zero initial values
are equipped with, when
is the integer 0, 1 or 2,
denotes the integer-order derivative
, otherwise
denotes the Riemann–Liouville or Caputo fractional derivative operator. The impulsive response to the Dirac delta driving function
is expressed by the inverse Laplace transform as
We note that under the zero initial conditions
, the Riemann–Liouville and Caputo fractional derivatives of order
are consistent [
2]. Otherwise for nonzero initial values, which the fractional derivative must be indicated. The impulsive response is also known as the Green’s function or the fundamental solution [
2,
23], from which the solution of Equation (
1) with nonzero initial values can be expressed through integration and convolution.
By the complex path-integral formula of the inverse Laplace transform, Equation (
2) has the form
where Br denotes the Bromwich path, i.e., a straight line on the
s plane from
to
such that the singularities of the integrand sit on its left side. For a further calculation by the residue theorem, we need to find out the zeros of the characteristic equation
where, when
is not integers, the one-valued branch
is taken and the zeros are limited on the principal Riemann surface
. Notice that the characteristic Equation (
4) can be directly written out from Equation (
1) like an integer-order case. We note that the characteristic equation in this paper is introduced through the inverse Laplace transform and is different from the characteristic equation Dubovski and Slepoi [
27,
28] introduced to determine the parameter in a series solution. Moreover, we note that the homogeneous fractional vibration equation belongs to the types investigated in [
27,
28], where the method of series solutions was proposed.
In [
21], Naber considered Equation (
4) in the case of
and proved that for any specified
,
and
, Equation (
4) has a pair of conjugated complex roots with a negative real part on the principal Riemann surface
. In [
22], Wang and Du investigated the case
and proved that the conclusion is still true.
It is known that when
, the roots of Equation (
4) have three different forms clarified by the three cases of the discriminant
:
,
and
, which correspond to the over damping, critical damping and under damping for the classical vibration equation
. How the three cases of the discriminant
affect the couple conjugated complex roots in the circumstance of
, and further on the solution of the fractional vibration equation, has not been reported to our knowledge.
In particular, for the case of , when approaches 1, how the couple conjugated complex roots approach the two different real roots of the case is not an apparent status. This is the motivation for this work.
In this paper, we consider the roots of the characteristic Equation (
4) and the impulsive response of the fractional vibration Equation (
1) in the three cases of the discriminant
, where the range of the order
covers the integers 0, 1 and 2, and also the noninteger cases
and
, simultaneously. The text is organized as follows. In
Section 2, we prove that for any
,
and
, the characteristic Equation (
4) has exactly a pair of conjugated simple complex roots with a negative real part on the principal Riemann surface. For the three cases of the discriminant
, the variations of the argument and modulus of the roots according to
are clarified. In
Section 3, the trajectories of the roots
on the upper-half complex plane are analyzed and simulated for the three cases of the discriminant
. In
Section 4, a particular discussion for the case of
is conducted, where the trajectories of the roots
are further clarified according to the change rates of the argument
, real part
and imaginary part
of the root
at
. In
Section 5, for the three cases of the discriminant
, the residue contribution and Hankel integral contribution to the solution of the fractional vibration equation resulted from the inverse Laplace transform are studied.
Section 6 summarizes our conclusions.
2. Argument and Modulus of Roots of the Characteristic Equation
The considered characteristic Equation (
4) with three parameters, two coefficients
b,
c and one power exponent
is a transcendental equation when
is not integers. First, we list results for cases of
being integers. If
or
, then Equation (
4) has a pair of conjugated pure imaginary roots,
or
Here, the values of
are appended in parentheses to emphasize the dependence of the roots on
, and by putting a bar, we denote the conjugate. If
, then the roots of Equation (
4) have the following three forms clarified by the discriminant,
The absolute values of the imaginary parts in Equations (
5), (
6) and (
9) have the following relationship.
Proposition 1. The imaginary part in Equation (9) satisfies the property: Proof. If
, then we have
and further
, from which it follows that
Thus, the inequations in (
10) hold. If
, then we have
Thus, the inequality
is obtained. In addition, it is apparent that
The proof is completed. □
We pay particular attention to the case of
, and for this case, by the residue theorem, Equation (
3) can be expressed as
For the case of
, calculating the residues at the two simple poles
in Equation (
7), we obtain
For the case of
, calculating the residue at the second-order pole
in Equation (
8) leads to
For the case of
, calculating the residues at the two conjugated simple poles
and
in Equation (
9) yields
For the noninteger case
,
is multivalued. Here, we take the one-valued branch
and look for roots of Equation (
4) on the principal Riemann surface
. Because
s satisfies Equation (
4) if and only if its conjugate
satisfies Equation (
4), we only need to discuss the problem on the half complex plane
Let the exponential form of root be
, where
and
. Substituting it into Equation (
4) leads to
. Separating the real part and the imaginary part, we have the two equations
From the two equations, we determine the argument
and modulus
r of root on the upper-half complex plane for any specified
,
and
. It follows from Equation (
15) that
. From Equation (
16),
and
cannot belong to the interval
. Thus, the argument of the root
s is confined to the interval
, and the root, if any, has a negative real part.
From Equation (
16), we have
where the denominator is positive. In order to guarantee
, we must require
Thus, we can express the modulus as
By inserting Equation (
18) into Equation (
15) and applying trigonometric formulas, we derive the equation only involves
free from
r as
and further reduce to
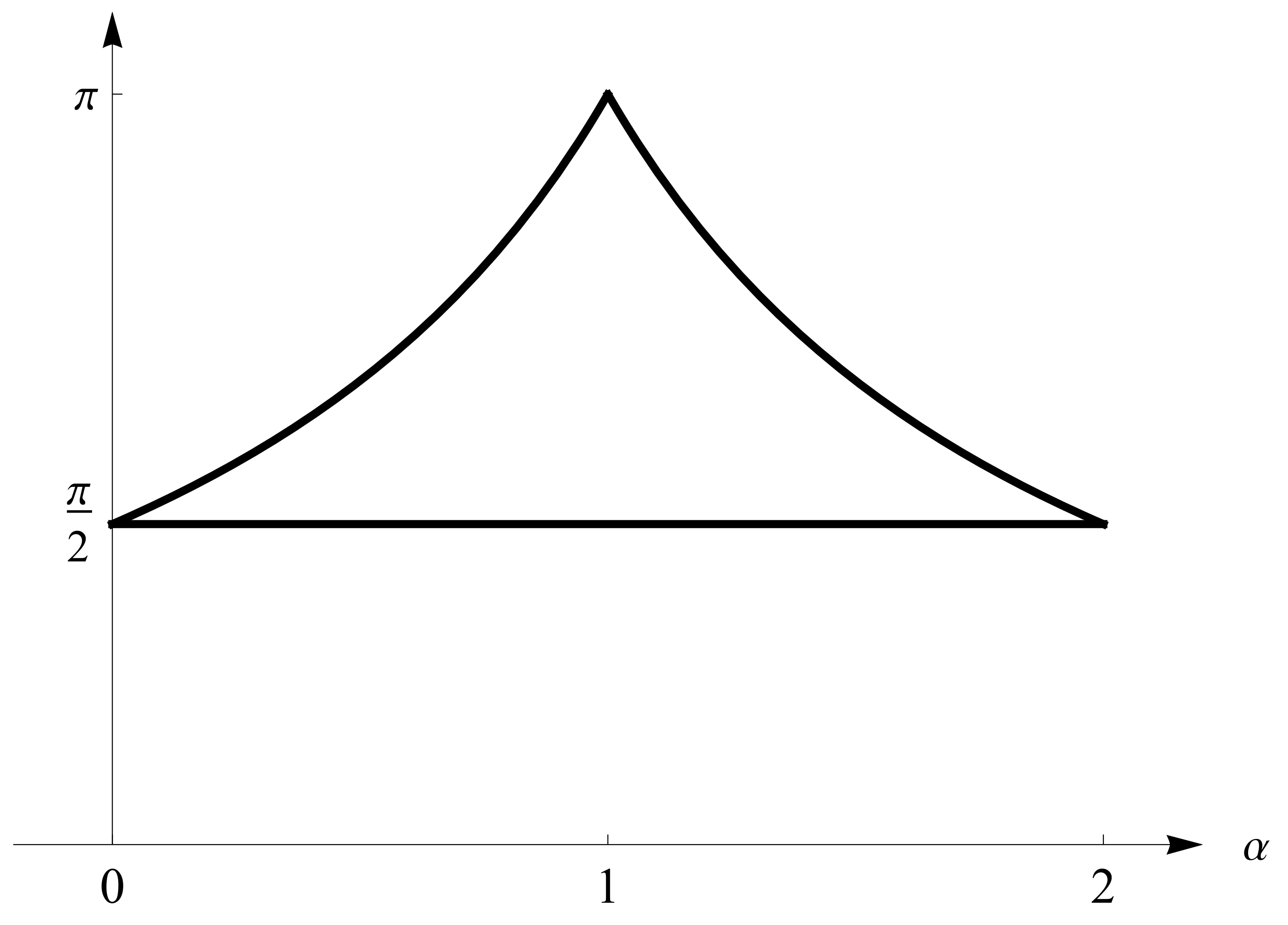
Here, the requirement
is necessary, which implies the limitation for the argument
The limitations for the argument in Equations (
17) and (
20) can be combined together as
This range of limiting the argument of root is shown in
Figure 1.
Rewrite Equation (
19) into the following form and define the left-hand side as the function
,
Our aim is to show the argument
of the root can be uniquely determined by Equation (
22) for any specified
,
and
. In
Figure 2, surface
for
is shown on the domain
,
, where the vertical coordinates are limited in
.
For fixed
and
b, the function
satisfies the following limits,
as shown in
Figure 2. Furthermore, the partial derivative with respect to
is
where
can be estimated as
Because , so we have
Thus, by the theorem of implicit function, for any
and
, Equation (
22) uniquely determines an implicit function of the argument of the root vs.
,
which has the continuous derivative
. With the argument, the modulus of the root is determined from (
18) as
We summarize the above deduction as follows, taking into account the conjugated part in the lower semi-complex plane.
Proposition 2. For any , and , Equation (4) has exactly a pair of conjugated simple complex roots with a negative real part on the principal Riemann surface as and , where satisfies the Equation (21) and is determined by Equation (22), and is determined by Equation (23). The graphs of the implicit function
determined by Equation (
22) are shown in
Figure 3 for
and for
, 2, 4, 8 and 16. The outermost thin red dash curve is the boundary of
,
which corresponds to the limit
. The six curves arrayed outside-in from the outermost in
Figure 3 are just the six level intersections of the surface in
Figure 2 by the planes with the vertical coordinates 0, 0.25, 0.5, 1, 2 and 4.
In
Figure 3, dash line and dot-dash line are for the case of
, solid line is for the case of
and dot line and dot-dot-dash line are for the case of
. As
, the curve of
approaches the boundary (
24). We note that the left- and right-hand derivatives of the boundary (
24) at
are
The function
in Equation (
23) is composed through the implicit function
. We note that the argument and the modulus of the root in the upper-half plane,
and
, can be extended to define the closed interval
by using the results of the integer cases in (
5)–(
9). That is, for
and 2, we have
while for
we have
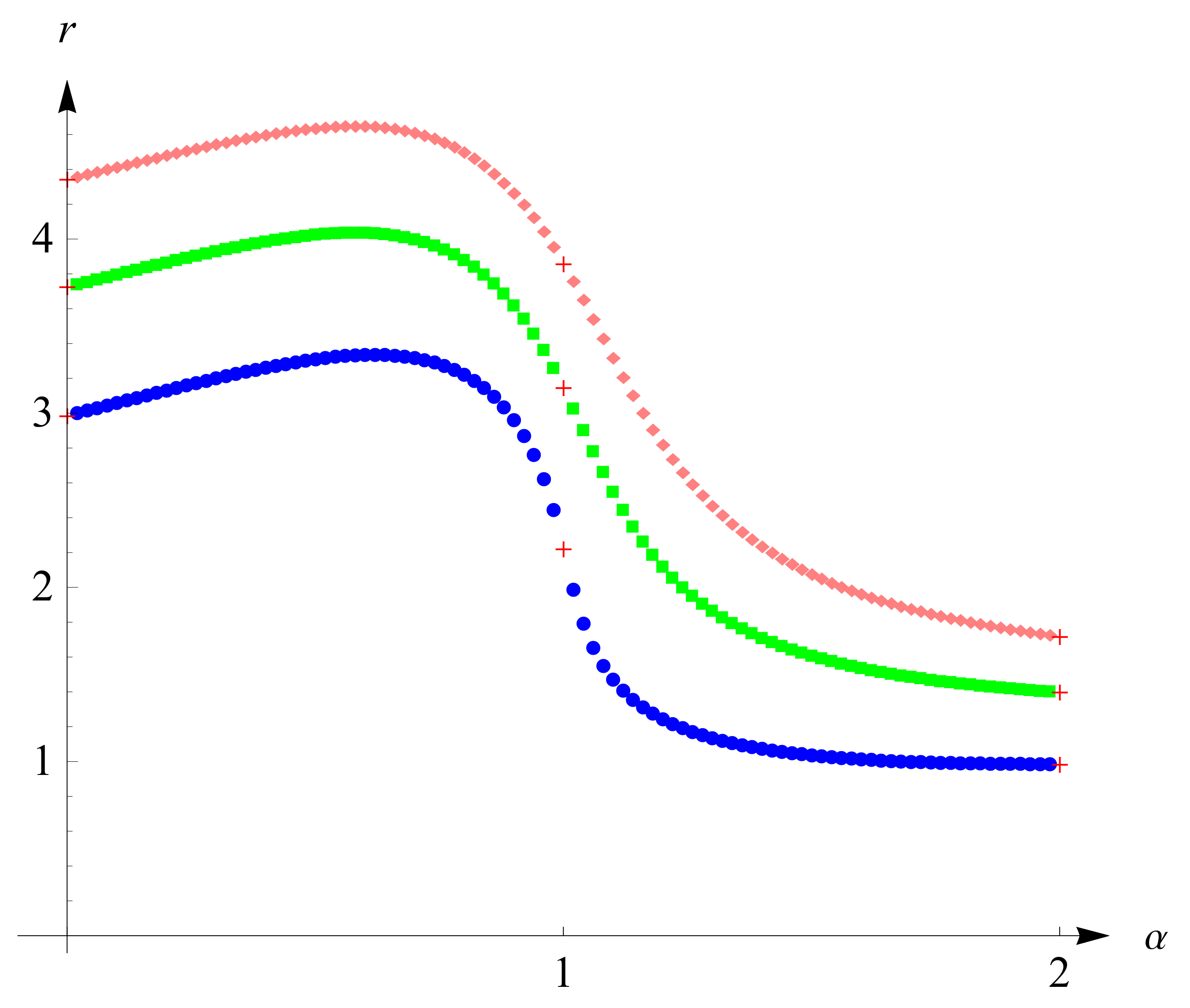
It is worth noting that for the case , , the moduli of roots are double-valued with .
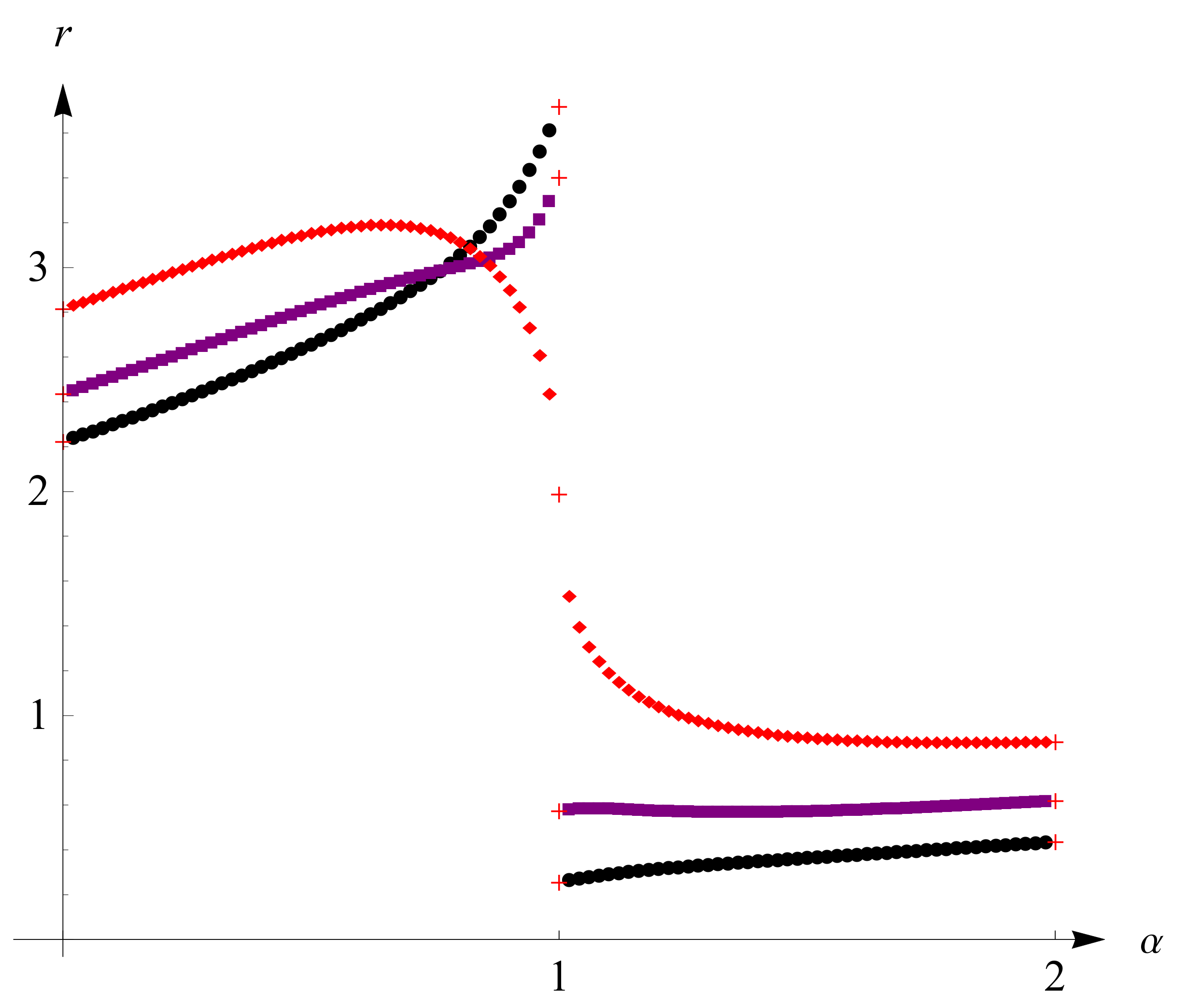
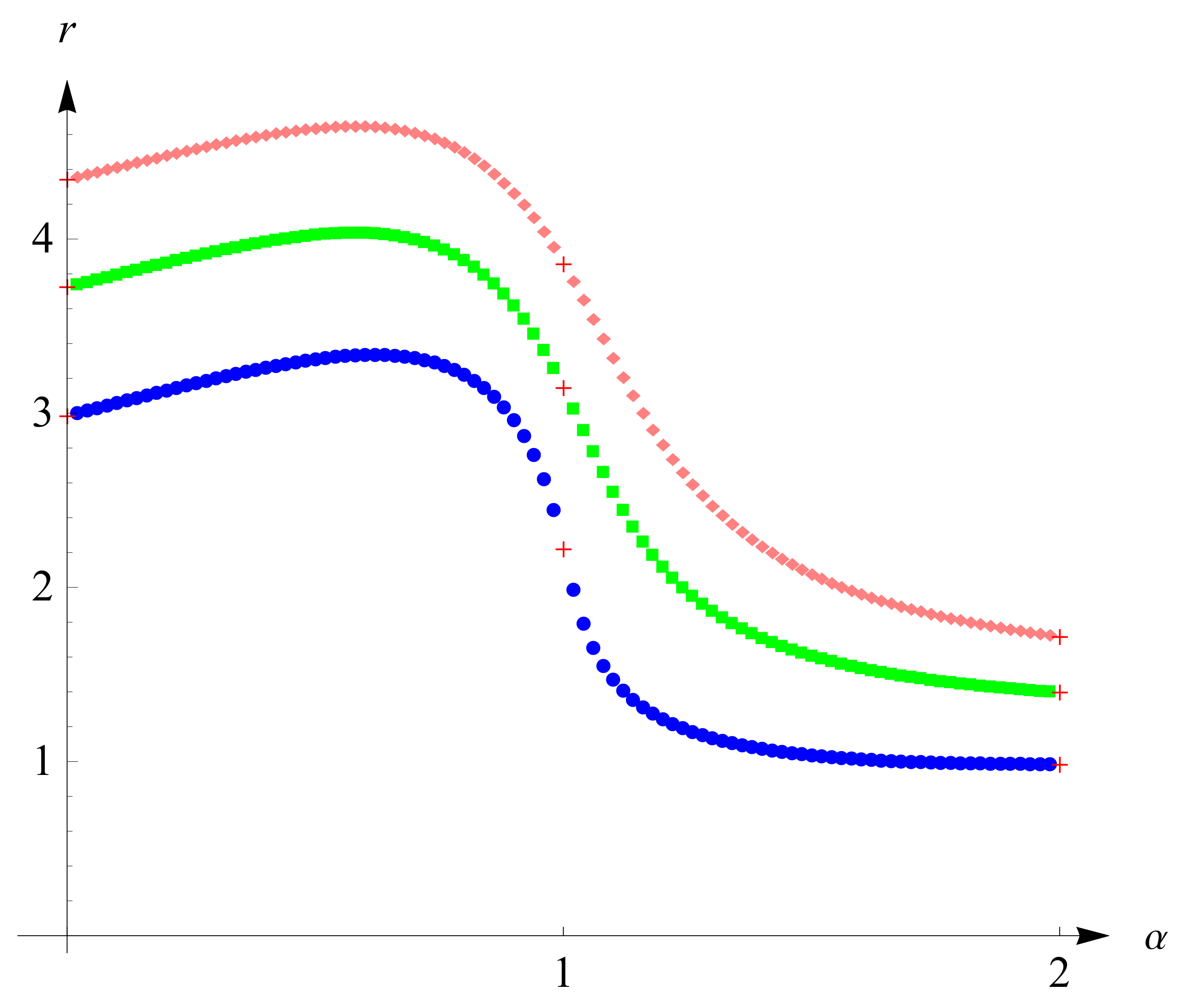
We depict the function
on the discrete values of
with the step size 0.02:
The data plots are shown in
Figure 4 for the cases of
and
and in
Figure 5 for the case of
, where data for the integer cases,
, 1 and 2, are depicted by red ‘+’. We note that the circular dot line and square dot line in
Figure 4 belong to the case
, and jump discontinuities are shown at
.
For the two implicit functions
and
, the derivatives can be given as follows. First, from (
22) follows the partial derivative,
where
By the formula of derivative of implicit function, we obtain
and furthermore, from Equation (
23), we derive
Note that in Equations (
30) and (
31),
denotes the implicit function
. The two derivatives will be used in the next section.
Proposition 3. Suppose , then is a root of equation if and only if is a root of equation Proof. If
is a root of equation
, then
, which is equivalent to its conjugate
. Then, multiplied by
on the two sides, the equation becomes
This means
is a root of Equation (
32). The reverse is also true. The proof is completed. □
From
Figure 3, the curve of
is not symmetrical about the straight line
in general. However, from Proposition 3, a sufficient condition for symmetry can be given as follows.
Proposition 4. Suppose the argument of the root of equation on the upper-half complex plane is , where , then the function satisfies the equality , i.e., the curve of vs. α is symmetrical about the straight line .
3. Root Trajectories in Three Cases
In this section, we consider the variation of the root with respect to in three cases clarified by the discriminant . Our discussion concentrates upon the upper-half complex plane and is based on the fact that the argument of the root, , is continuous on the interval . Special attention is paid to the variation of the root near .
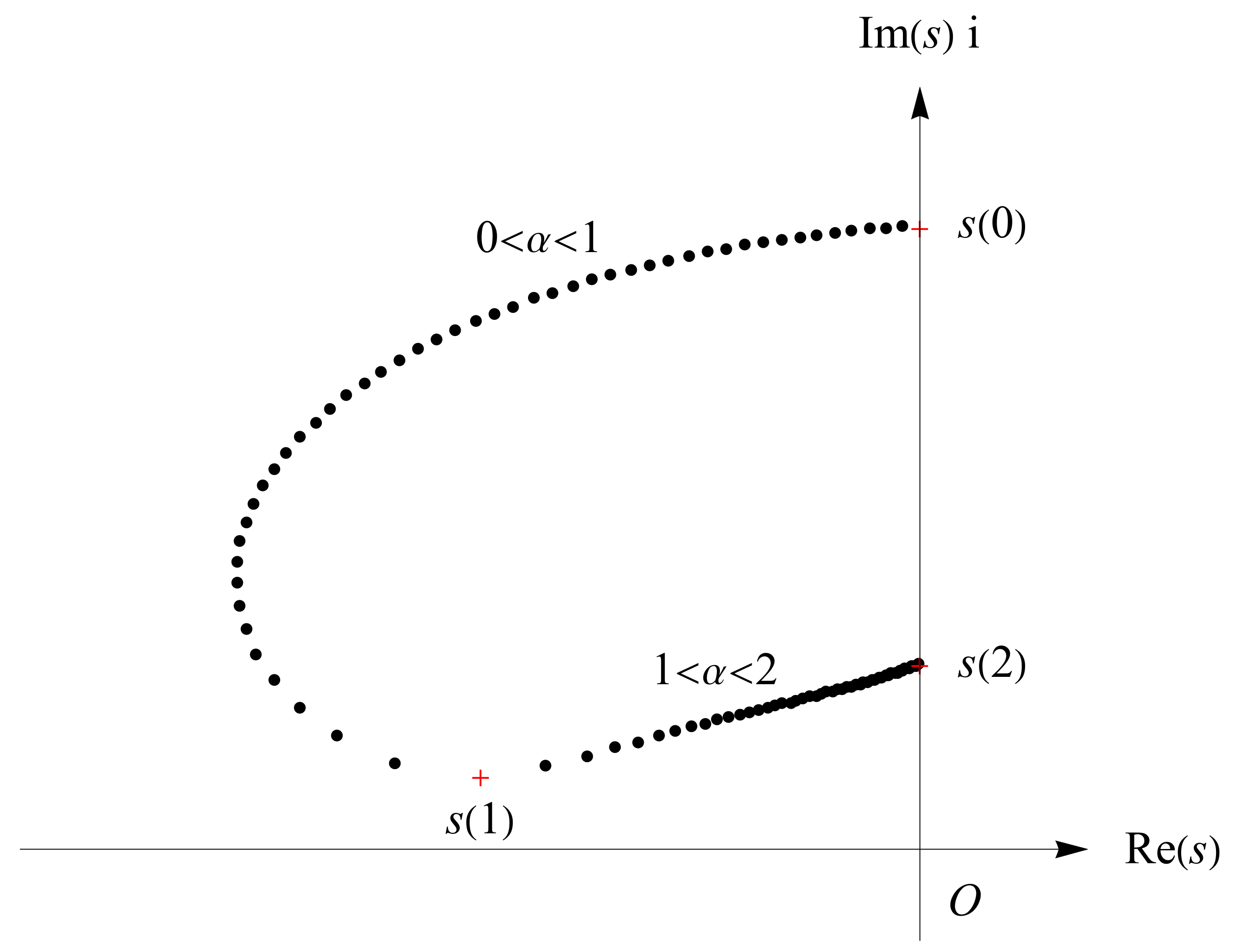
Case 1.
In this case, the limit of the argument of the root is
which is the peak value of
. For the modulus in Equation (
23), by L’Hospital rule
Due to that
is the maximum value of
, so
and
. Thus, from Equations (
33) and (
34), we have
The two limits should equal the absolute values of the two unequal real roots of the case
in Equation (
7), i.e., the following equations hold,
Thus,
has a downward jump when
increasingly passes through 1, as shown in
Figure 4. Substituting the two limits into Equations (
33) and (
34), we obtain
The limit case of
is consistent with the boundary in Equation (
25). Therefore, for the root
, we have the following result.
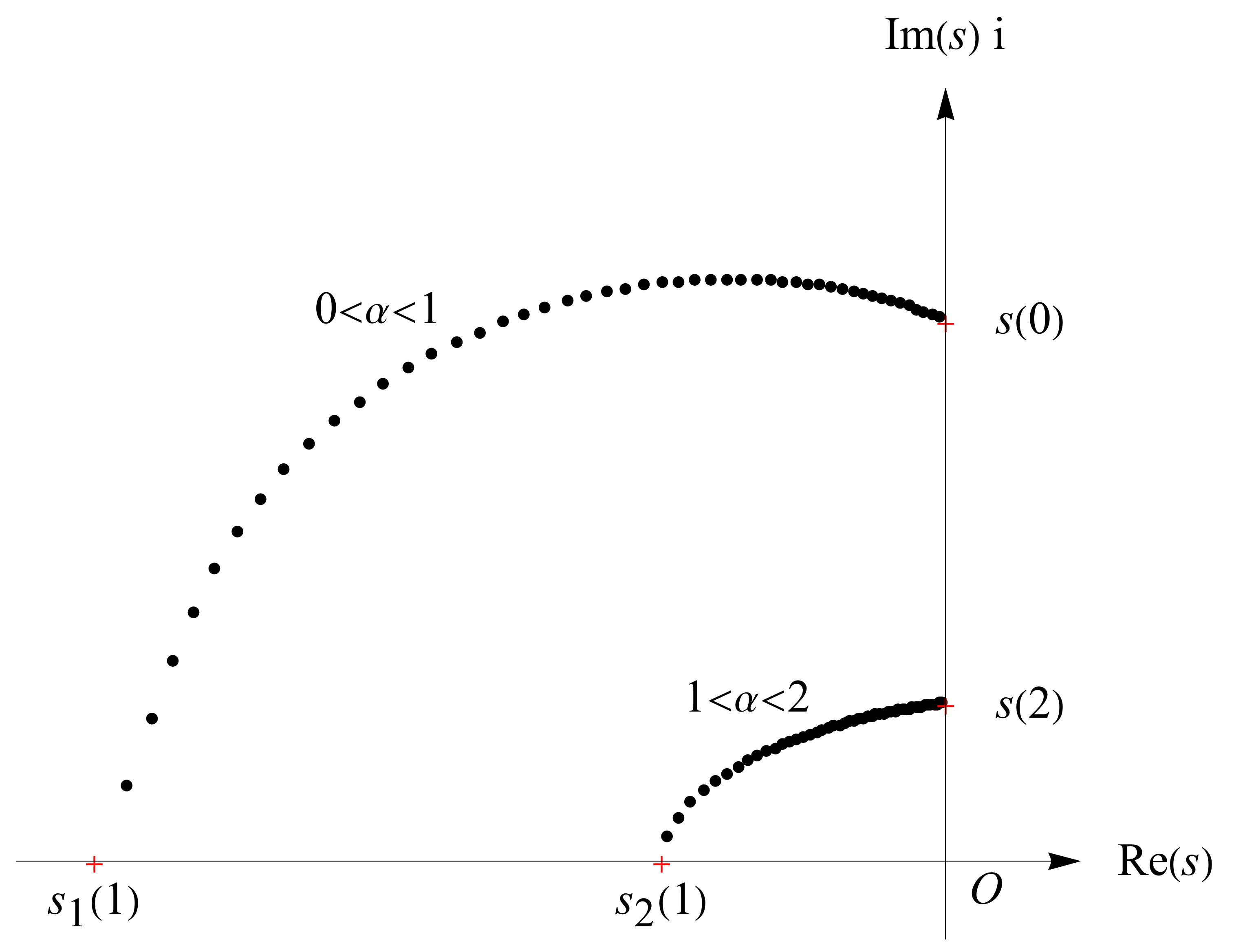
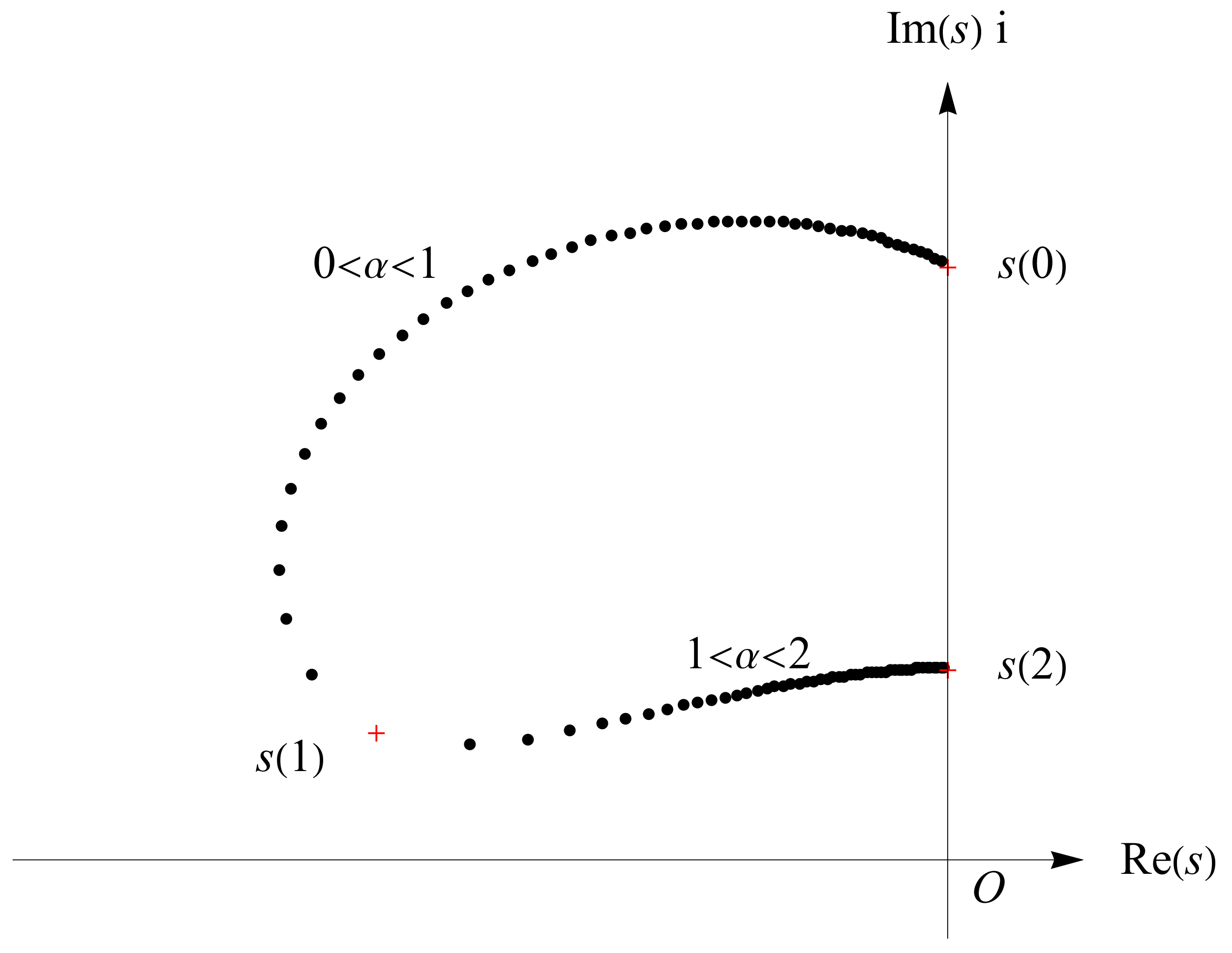
Proposition 5. If , then in the upper-half complex plane, the root as a function of α is discontinuous at , and Taking
,
and
as the values in Equation (
29), the trajectory of roots
in the upper-half complex plane is shown in
Figure 6, where
,
,
and
, indicated in red crosses, are the roots for the integer cases
, 2 and 1 in the upper-half complex plane.
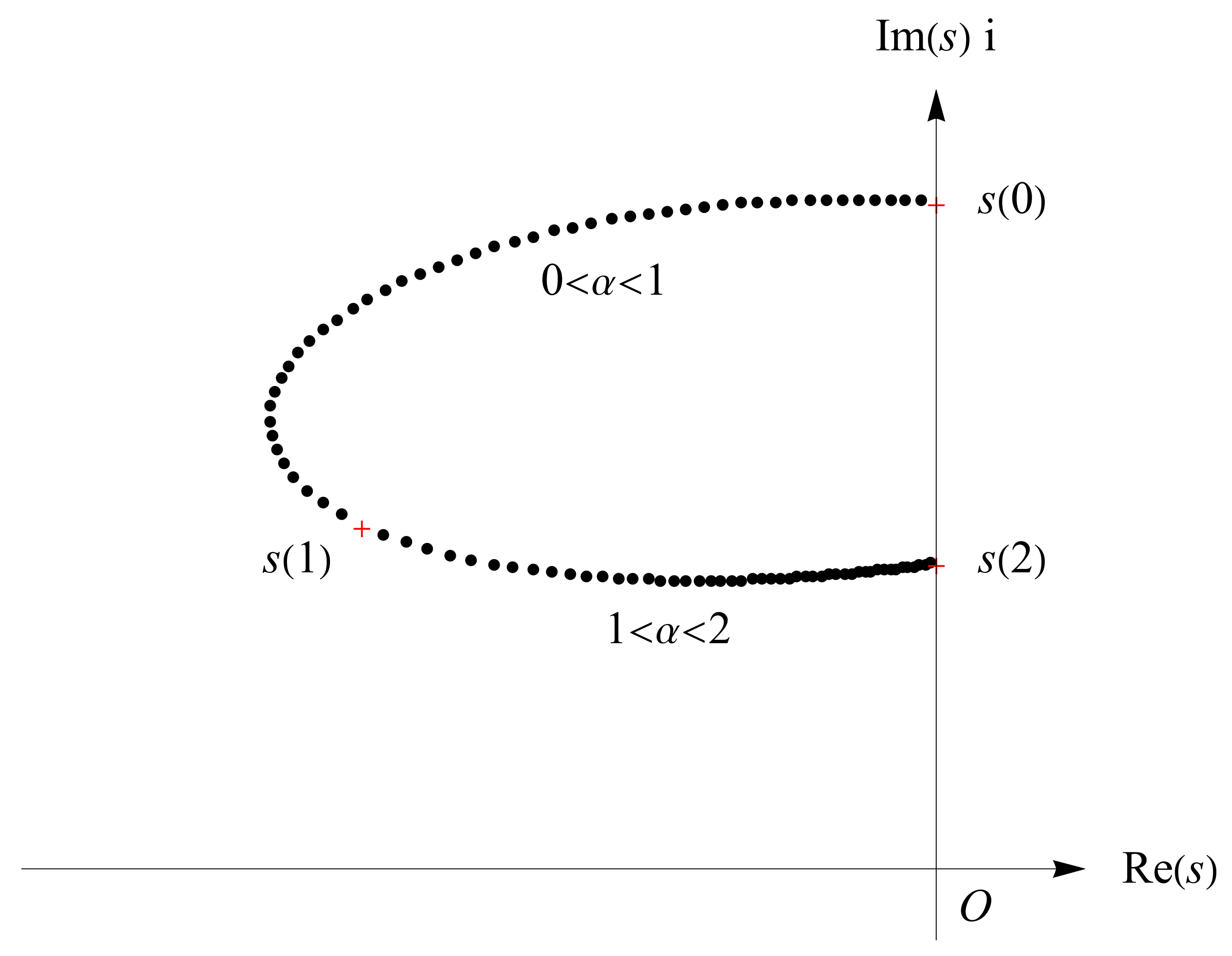
Case 2.
For the critical case, the argument of the root satisfies the limit
As a limiting case of
, from Equations (
35) and (
36), we have
Therefore, the root is continuous at , but non-differentiable at .
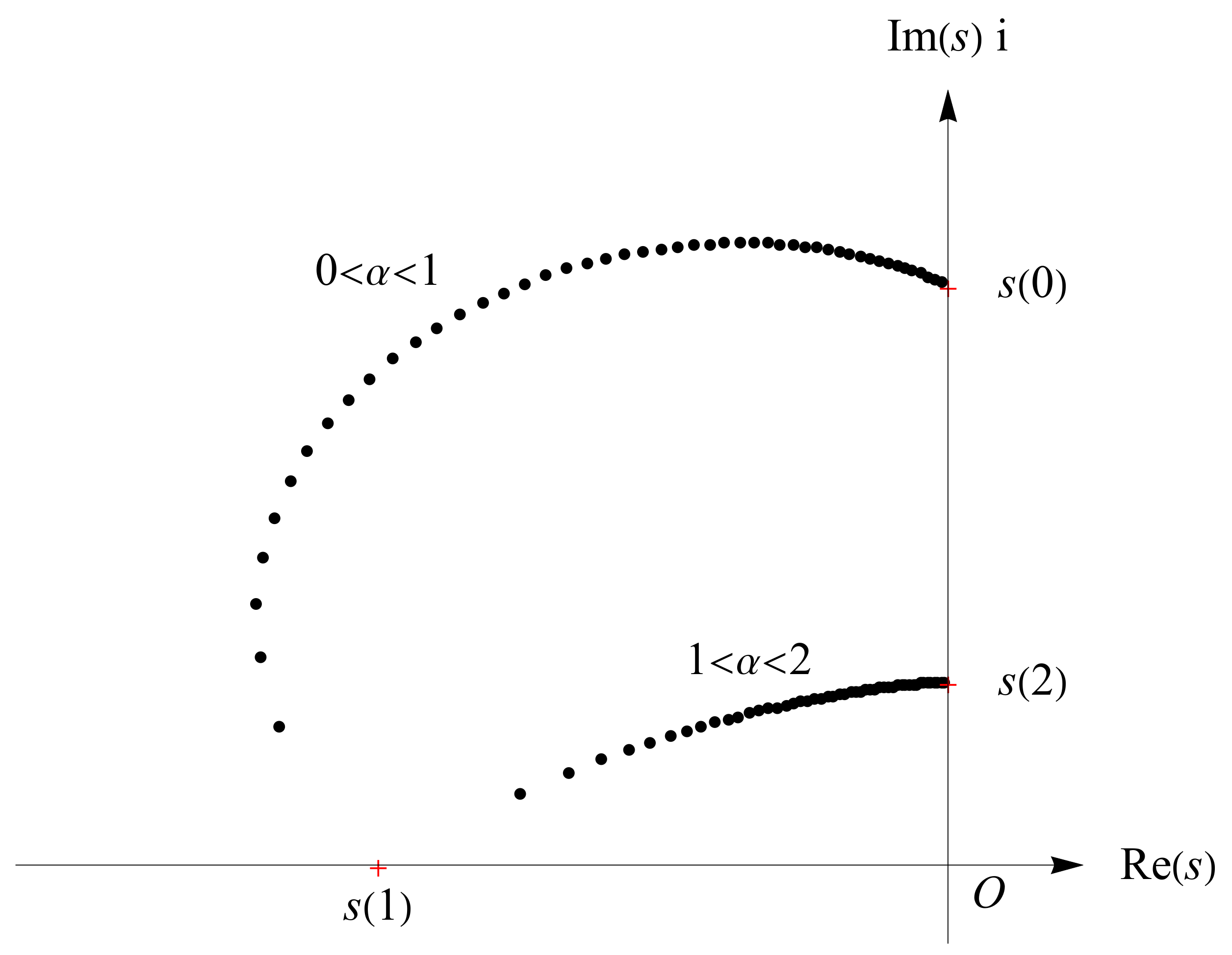
Taking
,
and
as the values in Equation (
29), the trajectory of roots
in the upper-half complex plane is shown in
Figure 7, where
,
and
, indicated in red crosses, are the roots for the integer cases
, 2 and 1 in the upper-half complex plane.
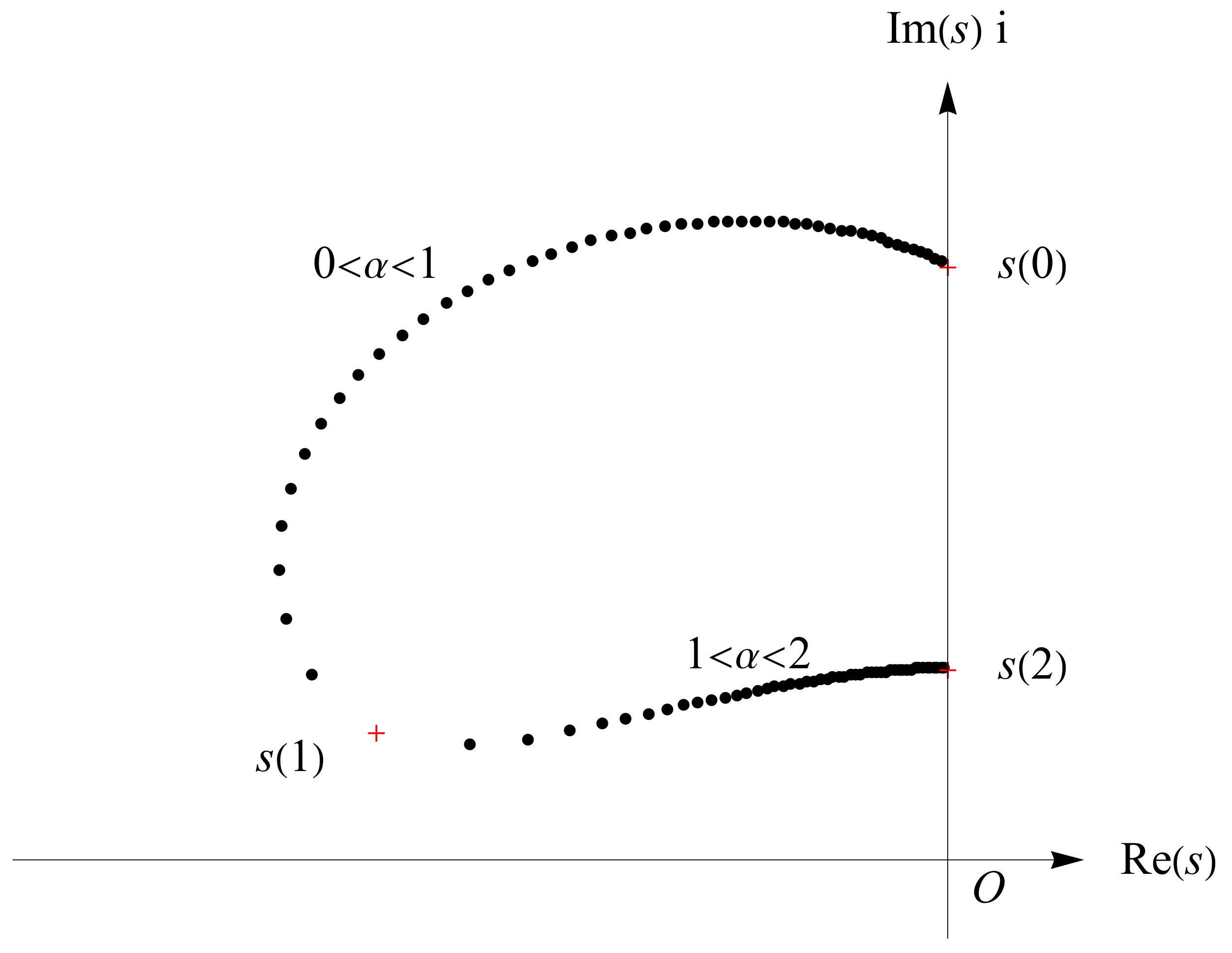
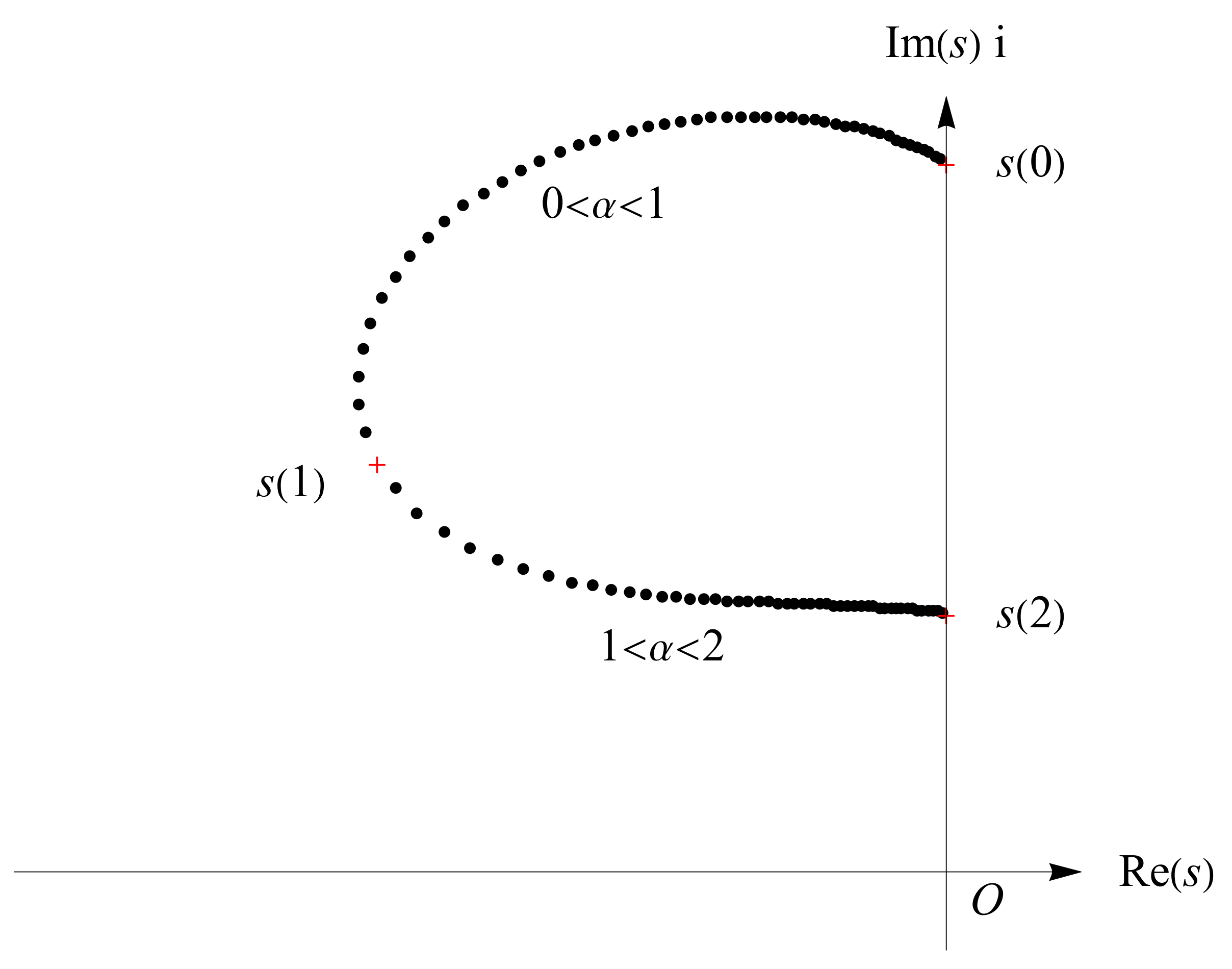
Case 3.
In this case, from Equation (
28), the argument and modulus of the root in the upper-half complex plane have the limits
and
The root
is continuous at
, and also differentiable, which will be further discussed in the next section.
Taking
,
and
as the values in Equation (
29), where
, the trajectory of roots
is shown in
Figure 8, where
,
and
, indicated in red crosses, are the roots for the integer cases
, 2 and 1 in the upper-half complex plane. As a comparison, we take
and
satisfying
, and the trajectory of roots
is shown in
Figure 9, where
,
and
are indicated in red crosses and are the roots for the integer cases
, 2 and 1 in the upper-half complex plane. Note that for comparison purposes, scale ranges of the horizontal and vertical axes in
Figure 6,
Figure 7,
Figure 8 and
Figure 9 are consistent.
From the trajectories of roots, has a faster change rate as approaches 1. For the cases of , the imaginary part of the root can become arbitrarily small as approaches 1. For the case of , the smaller the value , the larger the imaginary part of the root .
4. Further Discussion for the Case of
From the last section, we know that the root trajectory has better behavior at in the case of than other cases. We confine to the case and further clarify the variation of roots according to the change rates of the argument , real part and imaginary part of roots at . The discussion is confined to the upper-half complex plane.
From Equations (
28) and (
30), we derive that
and further, from Equations (
28), (
31) and (
39), we obtain
It is apparent that
is always true. That is, the modulus of root,
, decreases invariably at
. From Equation (
39), if
, then
, and if
, then
, while if
, then
.
Now, consider the real part and the imaginary part of the root
and its derivative
Substituting Equations (
28), (
39) and (
40) into Equation (
41), we acquire the derivative of the real part at
as a function of
b and
c,
Proposition 6. The equation uniquely determines a continuous and monotonically increasing implicit function defined on the interval such that and . The curve of the implicit function divides the domain in the plane into two regions, and above the curve and below the curve .
Proof. For any fixed
, the limits hold
Further, the partial derivative is calculated from (
43) as
Thus, the equation uniquely determines a continuous implicit function defined on such that .
Calculating the partial derivative with respect to
b, we have
It follows from the equation
that
Replacing
in Equation (
44) by using Equation (
45), we obtain
Hence, the derivative of the implicit function
is
Therefore, the implicit function
is monotonically increasing. Finally, by letting
in Equation (
45), we obtain
. Thus, the curve
of the implicit function
divides the domain
in the
plane into two regions. The signs of
are deduced from the equation
The proof is completed. □
For the derivative of the imaginary part at
, from Equations (
28), (
39), (
40) and (
42), we have
Proposition 7. The equation uniquely determines a continuous and monotonically increasing implicit function defined on the interval such that and , . The curve of the implicit function divides the domain in the plane into two regions, and above the curve and below the curve .
Proof. In the domain
, if
, then
from Equation (
46). Now, we look into the function
in the region
For any fixed
b, the limits hold
Calculating the partial derivatives, we have
where the equation
is used. Now, we estimate the second partial derivative as follows,
Moreover, from the inequality
, we deduce that
Therefore, the equation
uniquely determines a continuous and monotonically increasing implicit function
defined on the interval
such that
, and from Equation (
46), we know that
and
. Thus, the curve
of the implicit function
divides the domain
in the
plane into two regions. The signs of
are deduced from the equation
The proof is completed. □
From the above analyses, the curves
,
and
subdivide the domain
in the
plane into four disjoint regions, as shown in
Figure 10. The region IV is narrow and is magnified in
Figure 11. The characteristics of the four regions in the domain
are listed in
Table 1.
In region I, we take a sample
,
and depict the trajectory of roots
in
Figure 12. In
Figure 8,
,
, and in
Figure 9,
,
, which are all in region II. In region III, we take a sample
,
, and the trajectory of roots is shown in
Figure 13. In region IV, we take
,
and display the trajectory of roots in
Figure 14.
Note that region IV is in the immediate vicinity of the critical case . This means that only when is close enough to the real axis, its imaginary part may satisfy .
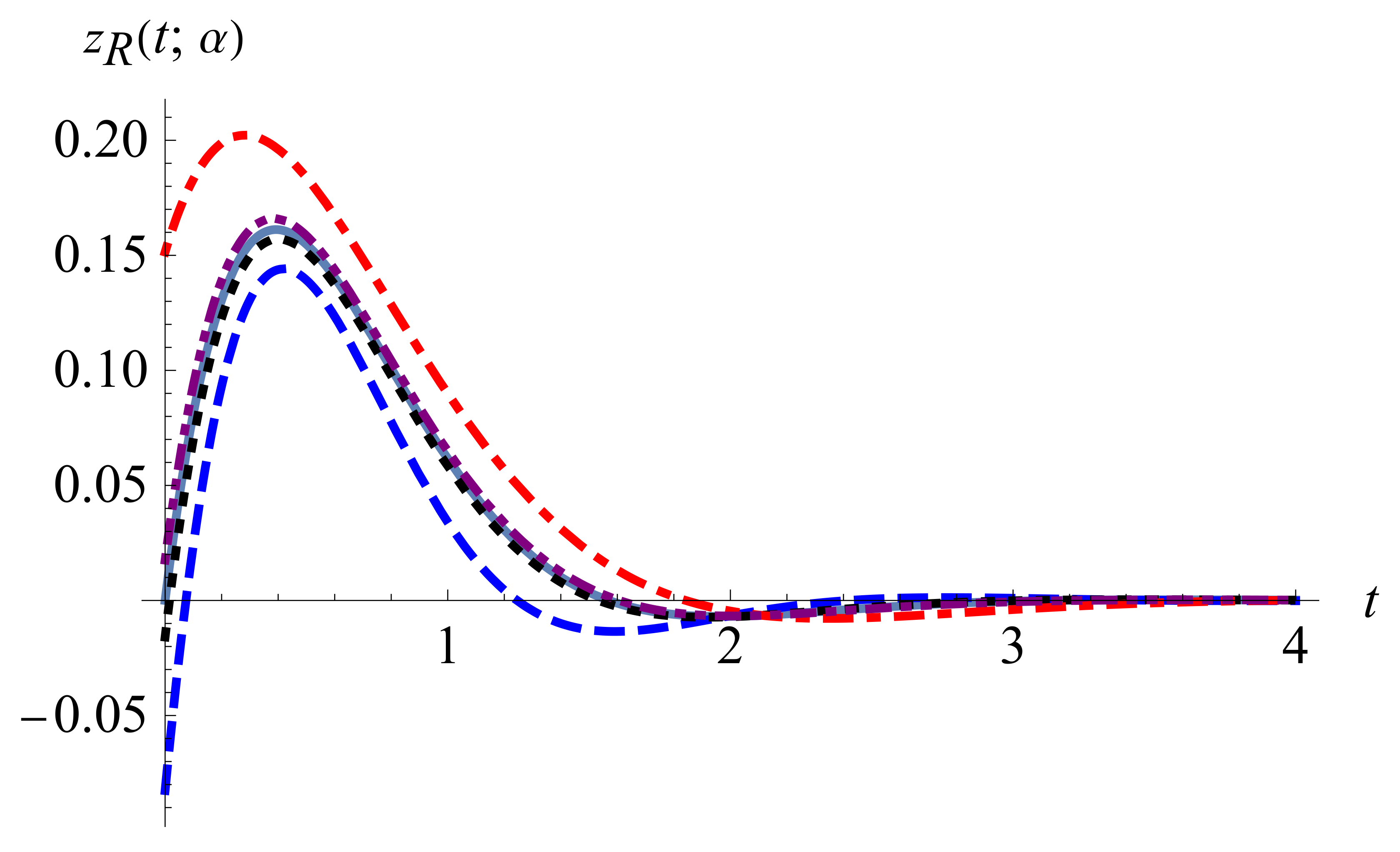
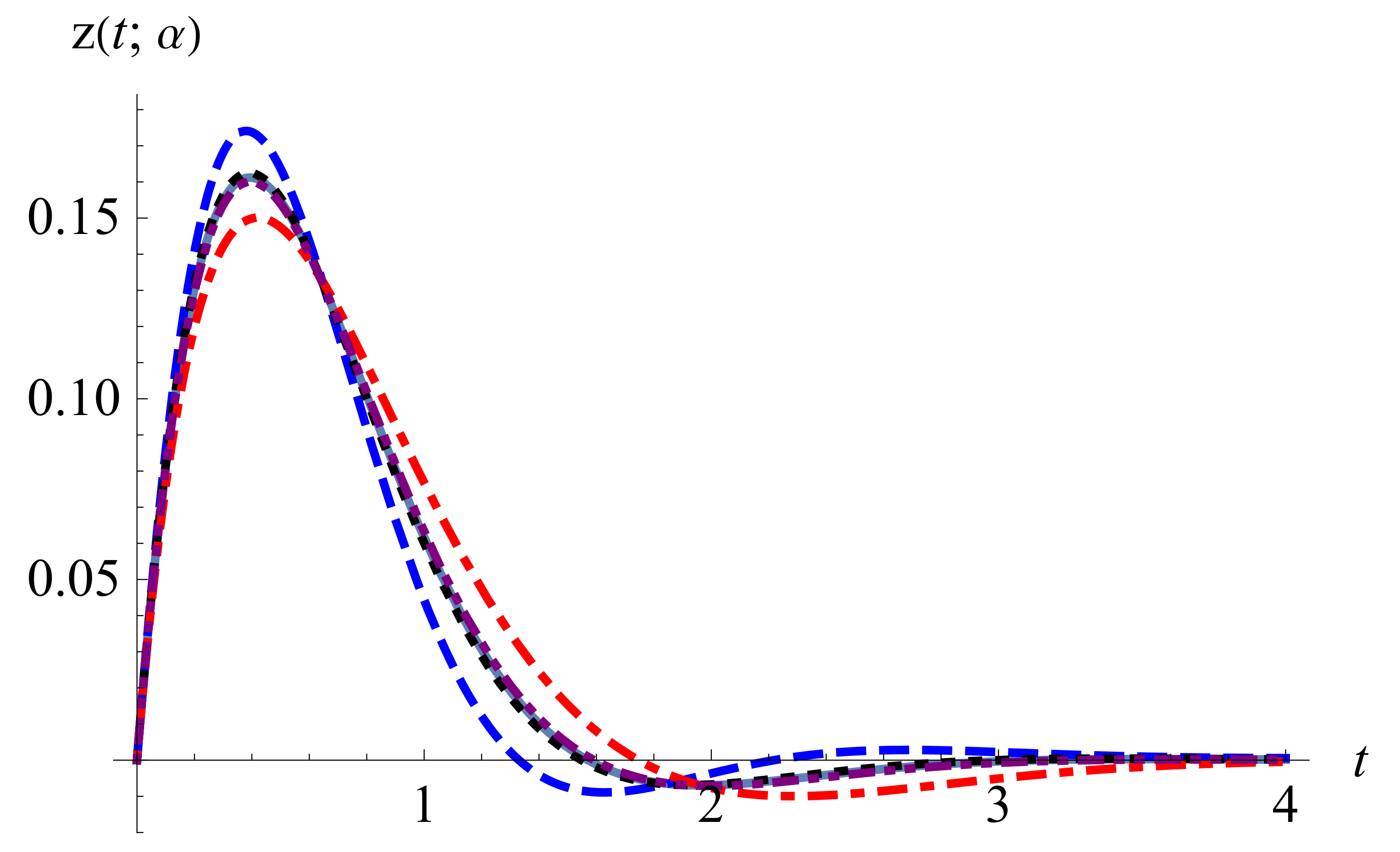
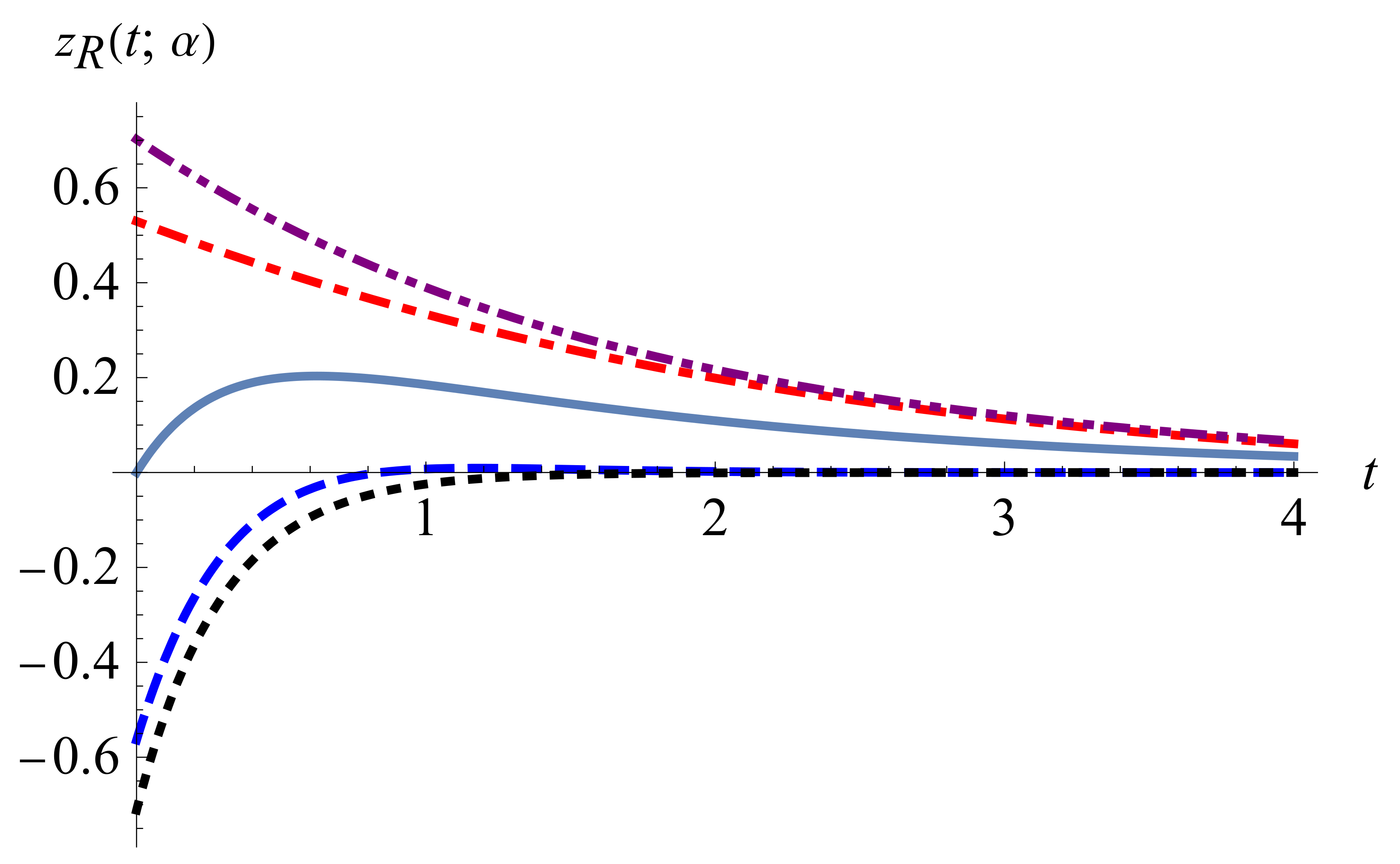
5. The Residue Contribution and Hankel Integral Contribution to the Impulsive Response
Consider the noninteger case
, and denote the couple of conjugated complex roots of the characteristic Equation (
4) on the principal Riemann surface as
and
, where
and
. By the residue theorem, the solution in Equation (
3) can be decomposed into two components: the residue contribution and the Hankel integral contribution,
where
We note that the Hankel path, Ha, is a loop starting from
and going along the lower side of the negative real axis to the origin
O, encircling the origin counterclockwise with the radius approaching 0 and passing through the upper side of the negative real axis and ending at
. Calculating the residues in Equation (
48), we obtain the residue contribution
where
The Hankel integral in Equation (
49) is reduced to the following real infinite integral
where
It seems that the residue contribution
approaches
in Equations (
12)–(
14) and the Hankel integral contribution
approaches 0 as
However, the facts are not so and depend on the sign of the discriminant
. If
, then from Equations (
37) and (
50), the left-hand limit of the residue contribution
at
is
while from Equations (
38) and (
50), the right-hand limit of
at
is
The two limits produce a jump, neither equals
in Equations (
12) and they satisfy the relationship
. In fact, the Hankel integral contribution
does not vanish as
but fills up the jump such that
as
. This can be seen from
Figure 15 and
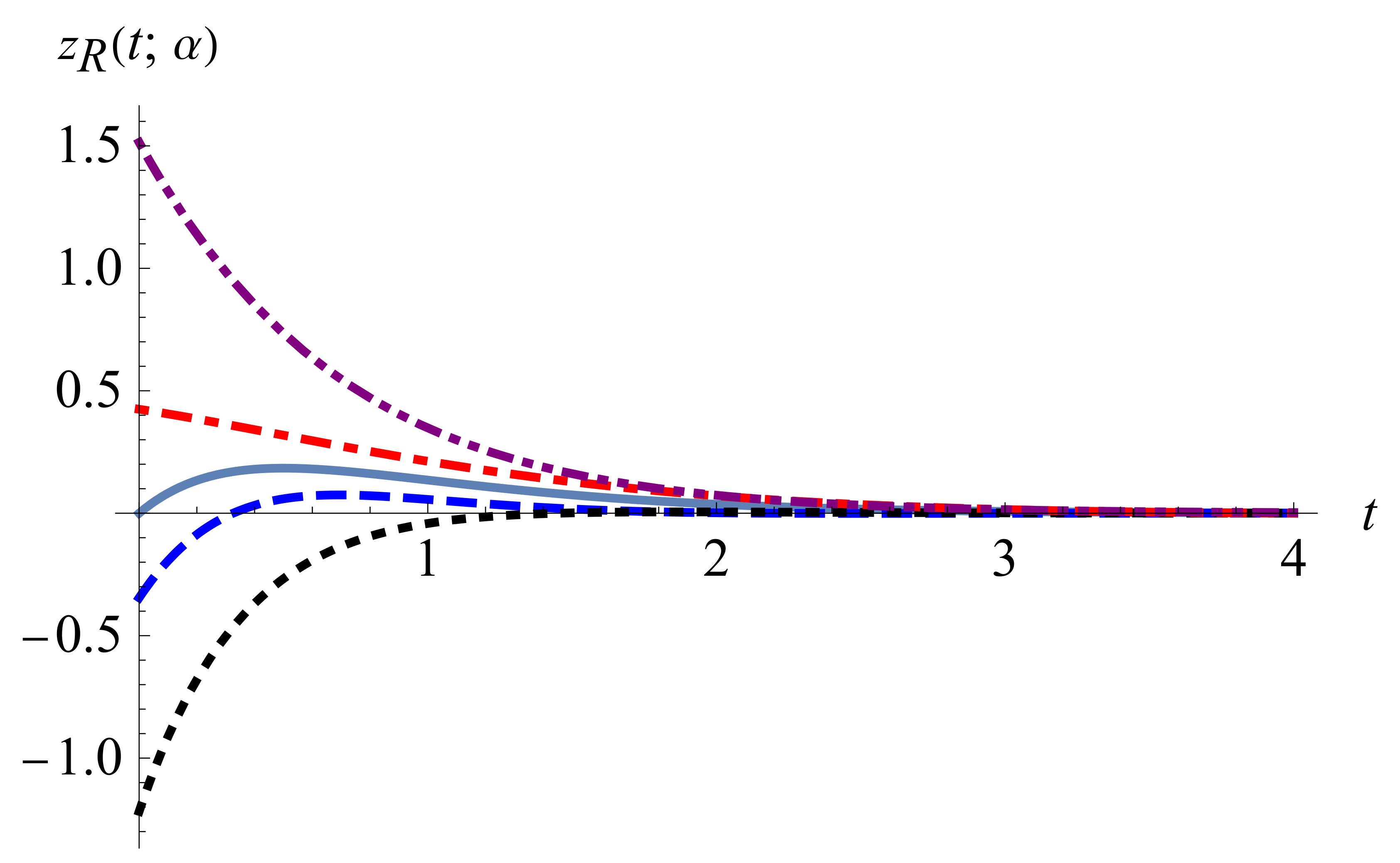
Figure 16. If
, then the variations of
and
are similar to the former case, see
Figure 17 and
Figure 18.
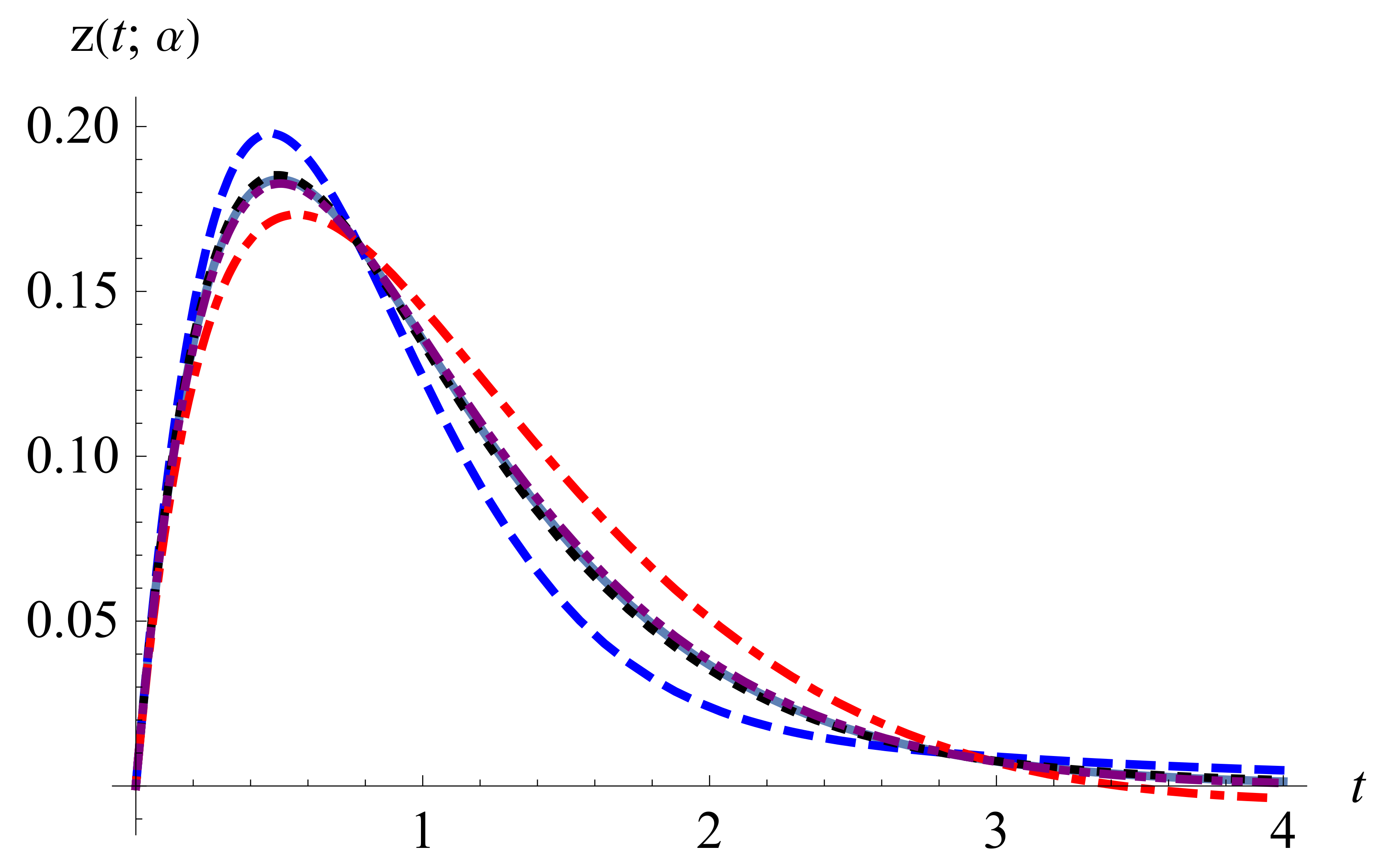
Nevertheless, if
, then the variations of the residue contribution
and the Hankel integral contribution
are different from the former two situations. From Equations (
9), (
28) and (
50), we derive that
in Equation (
14) as
Moreover, from
Figure 19 and
Figure 20, we can see that the residue contribution
approaches
and the Hankel integral contribution
approaches 0 as
.
6. Conclusions
We consider the roots of the characteristic Equation (
4) of the fractional vibration Equation (
1) on the principal Riemann surface for the three cases of the discriminant
:
,
and
, and with the range of
covering the interval
. Particular attention is paid to the varying of the roots
as a function of the order
near
on the upper-half complex plane. We find that the root trajectories of the characteristic equation with
varying have different behaviors in the three cases of the discriminant. The residue contribution and Hankel integral contribution serve as two solution components of the impulsive response of the fractional vibration equation. It is found that the changing pattern of the solution components as
depends on the sign of the discriminant
.
In
Section 2, we prove that for any
,
and
, the characteristic Equation (
4) has a pair of conjugated simple complex roots with a negative real part. For the three cases of the discriminant
, the variations of the argument and modulus of the roots according to
are clarified. For the integer-order cases,
, 1 and 2, the inverse Laplace transform gives the known analytic results. In
Section 3, the trajectories of the roots
on the upper-half complex plane are analyzed and simulated for the three cases of the discriminant
. For the case of
, the root
as a function of
is discontinuous at
, and the left and right limits equal the two different real roots of the case
as in Equations (
37) and (
38). For the case of
, the root
is continuous at
but non-differentiable at
. For the case of
, the root
is continuous and also differentiable at
. In
Section 4, the particular analyses for the case of
are conducted. The trajectories of the roots
are further clarified in the domain
on the
plane according to the change rates of the argument
, real part
and imaginary part
of the root
at
. For this purpose, the domain
is subdivided into four disjoint regions to clarify the trajectories of the roots.
In
Section 5, the residue contribution and Hankel integral contribution to the impulsive response of the fractional vibration equation are considered. For the cases of
, the left and right limits of the residue contribution
at
produce a jump and neither equals
. The Hankel integral contribution
does not vanish as
but fills up the jump such that
as
. Nevertheless, for the case of
, the variations of
and
are different from the cases
, and we derive that the residue contribution
approaches
as
and so the Hankel integral contribution
approaches 0 as
.
For the two solution components in Equations (
50) and (
51), the residue contribution represents a damping oscillation, while the Hankel integral contribution provides a monotonic recovering. Moreover, asymptotic behaviors can be obtained conveniently from the solution components [
23]. In the residue contribution (
50), the real part
and imaginary part
of the root
describe the decaying rate of the amplitude and the oscillation frequency, respectively. These results could be helpful for revealing the relationship between the model parameters
b,
c and
and the oscillation properties. Finally, we indicate that there are few reports on the root trajectories of an equation with a fractional power.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}