
Asymptotic Synchronization of Fractional-Order Complex Dynamical Networks with Different Structures and Parameter Uncertainties

Abstract
:1. Introduction
2. Preliminaries
Model Description
3. Main Results
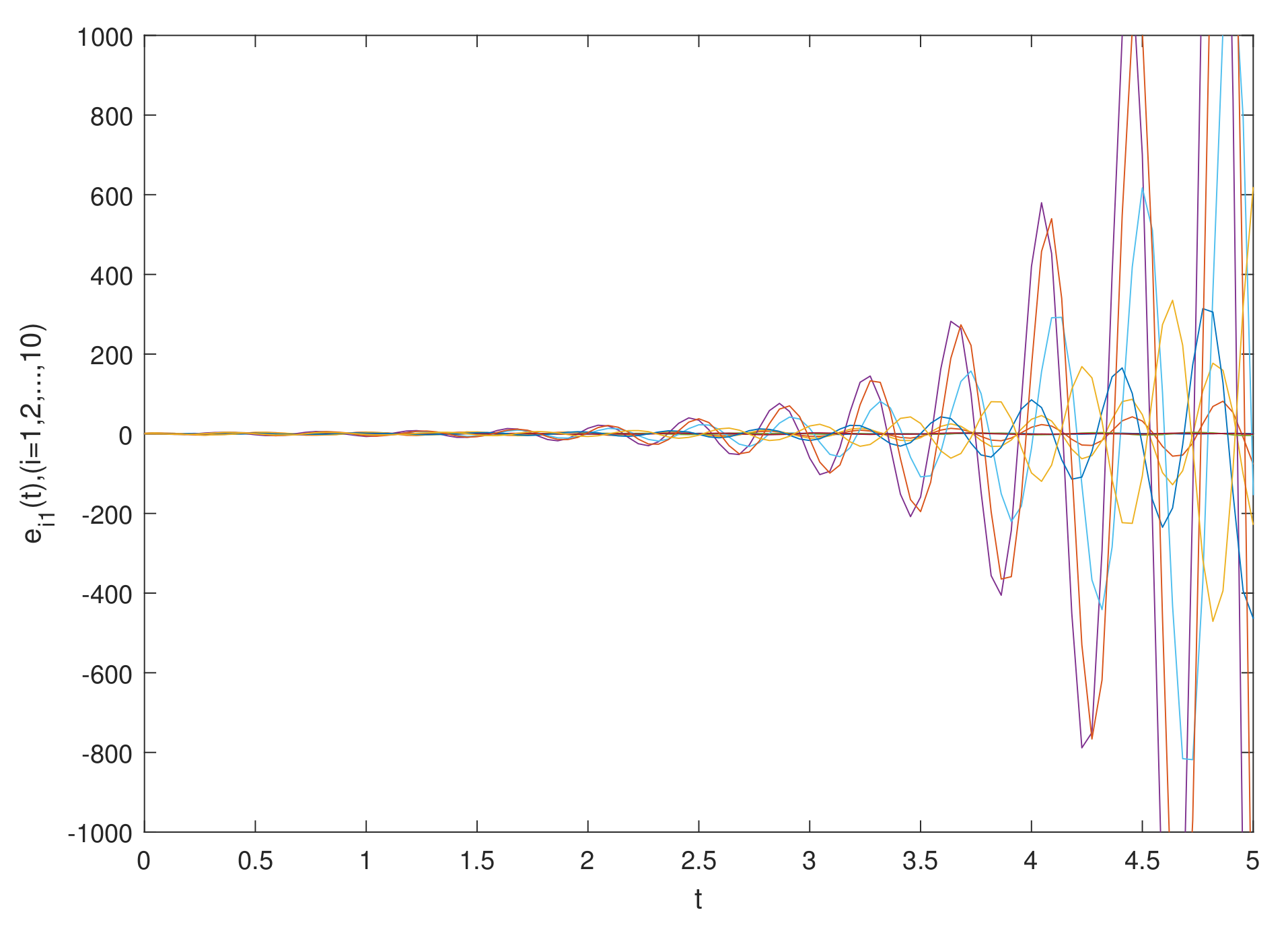
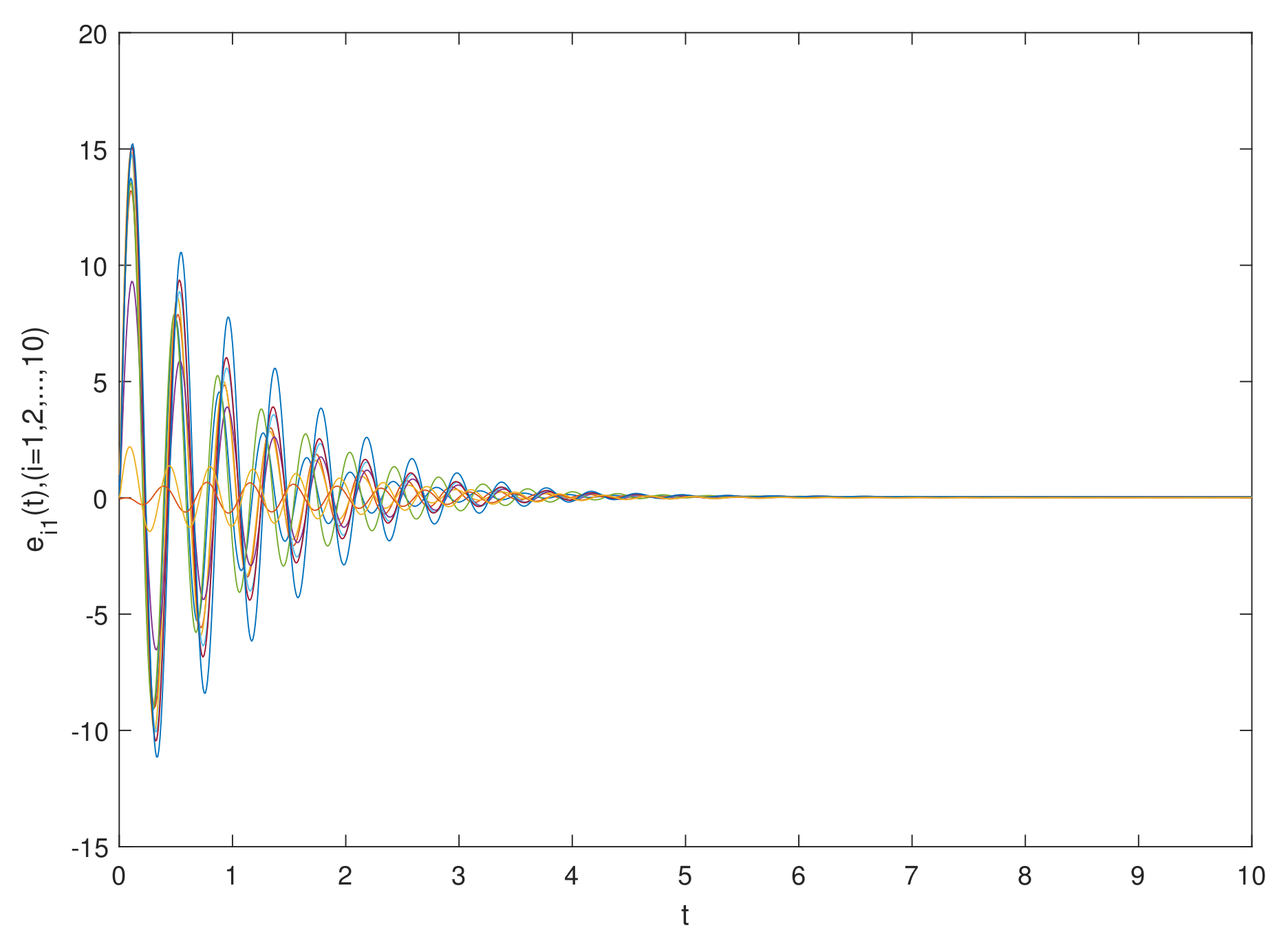
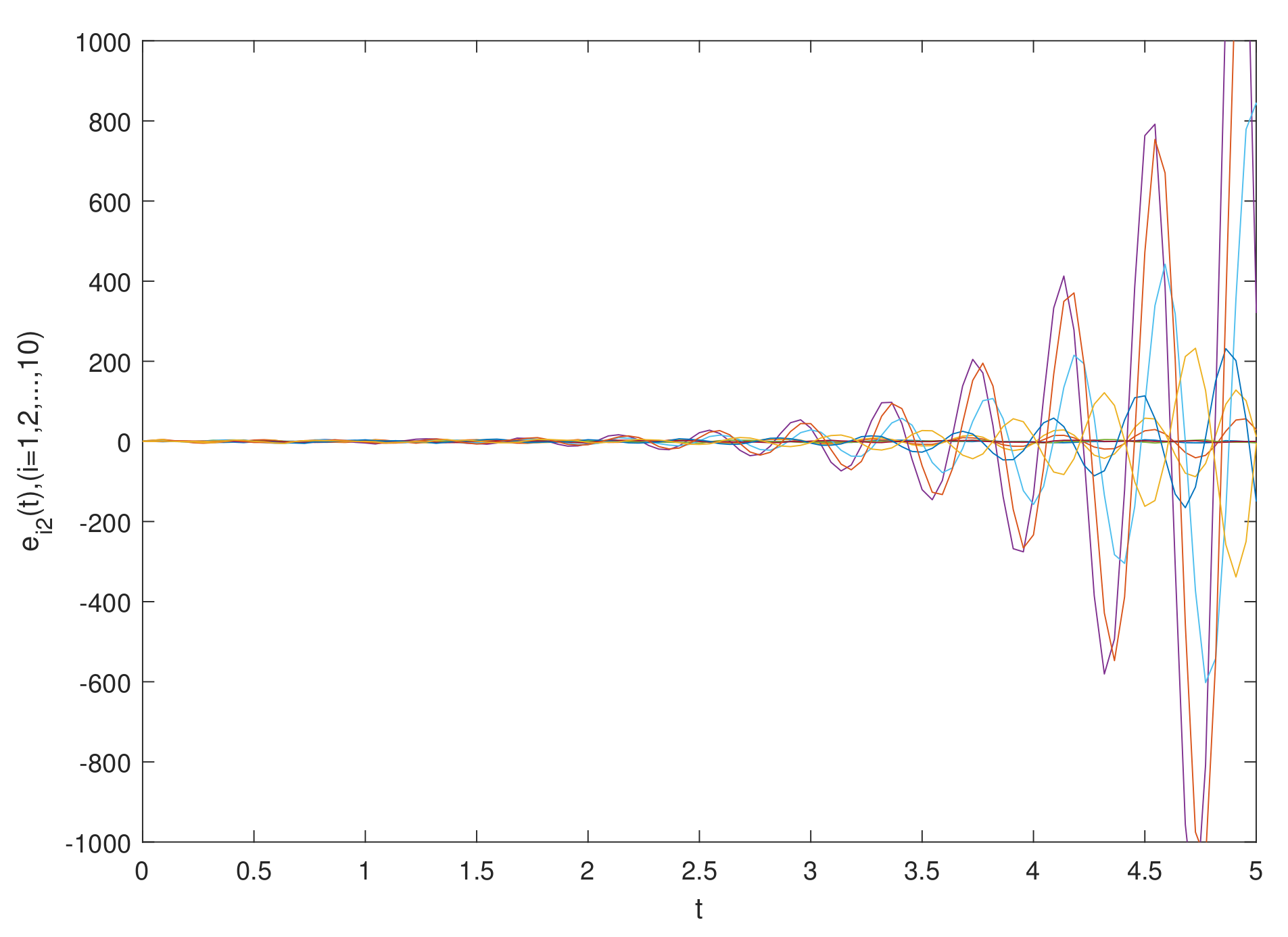
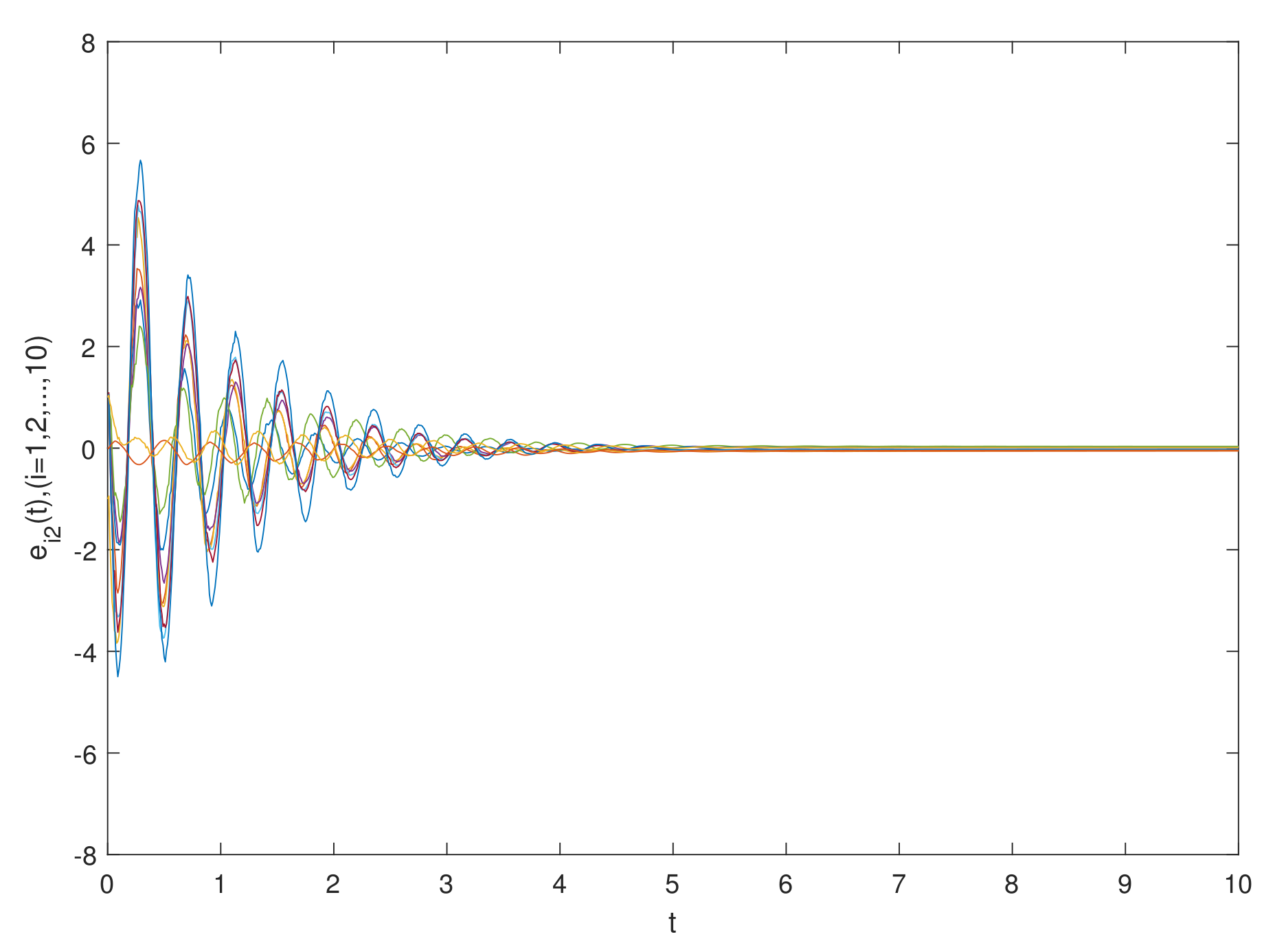
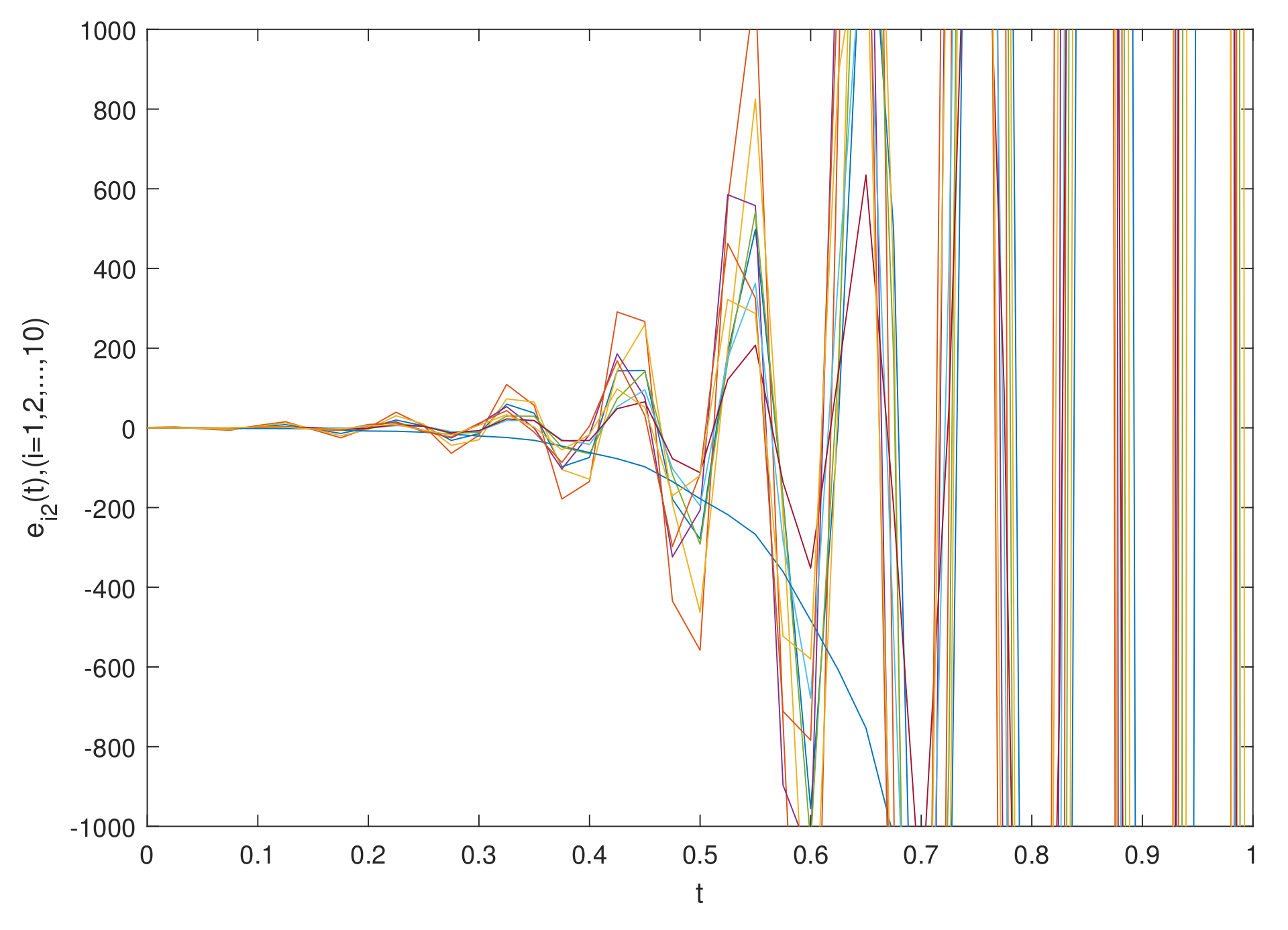
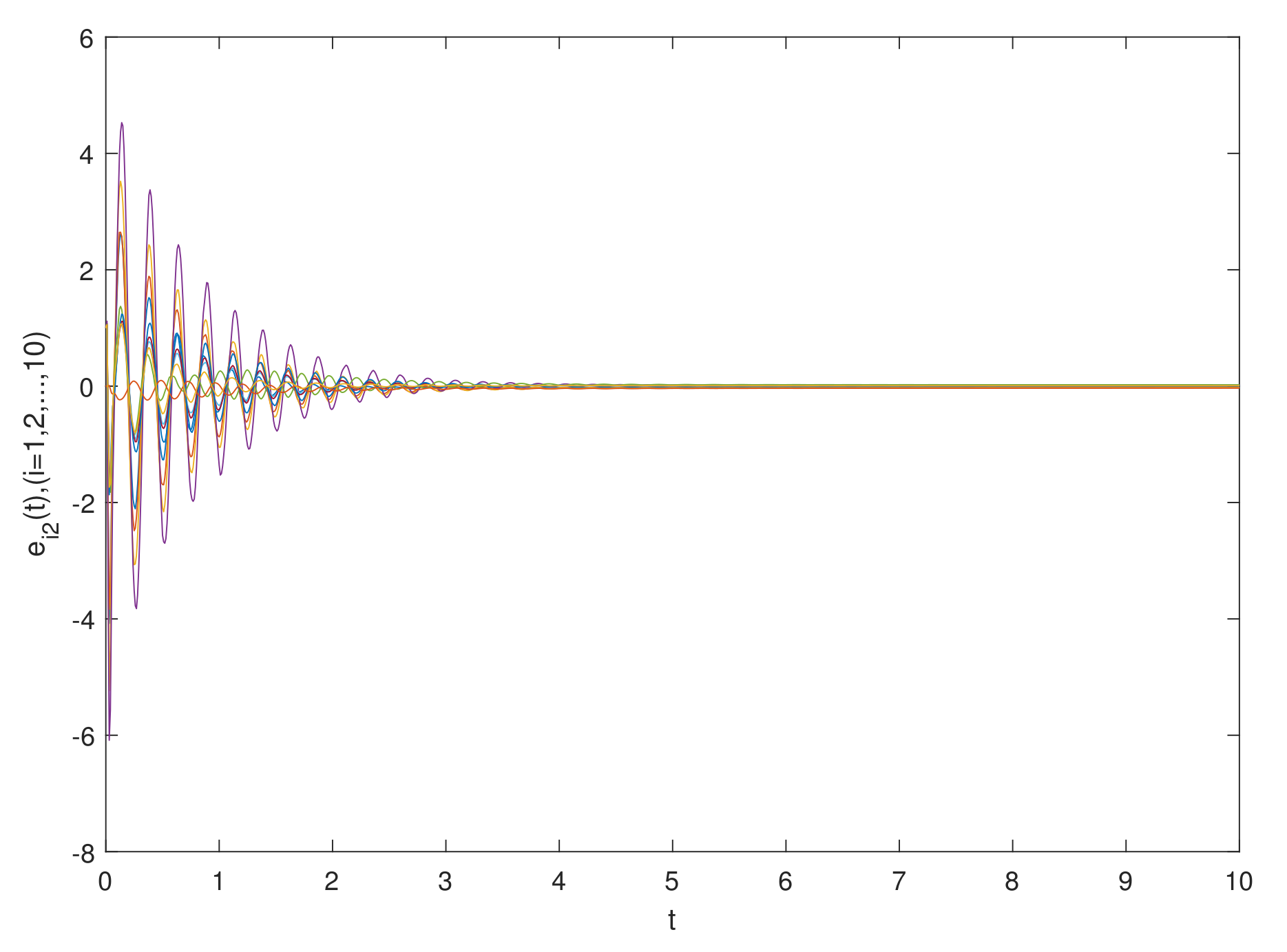
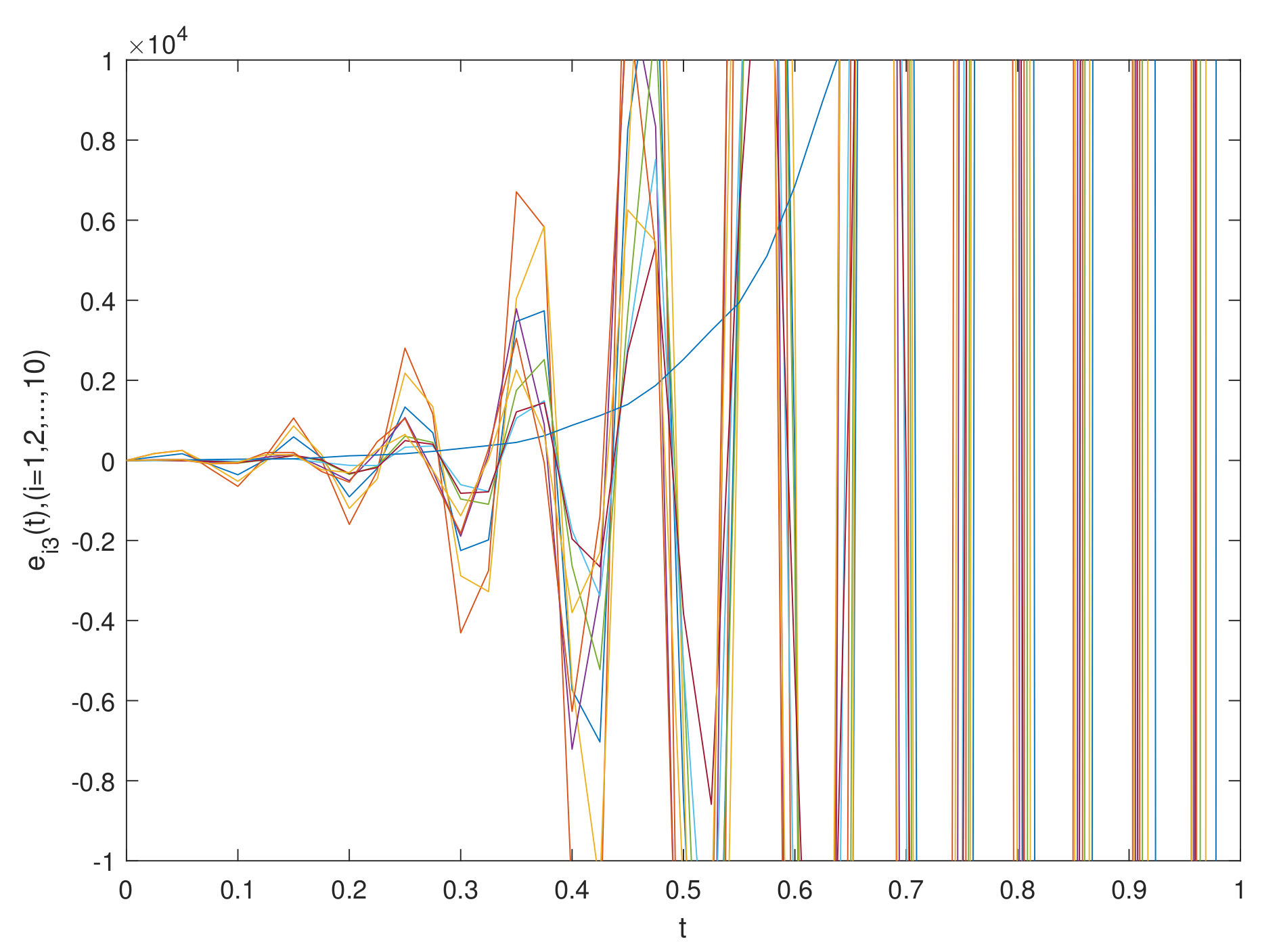
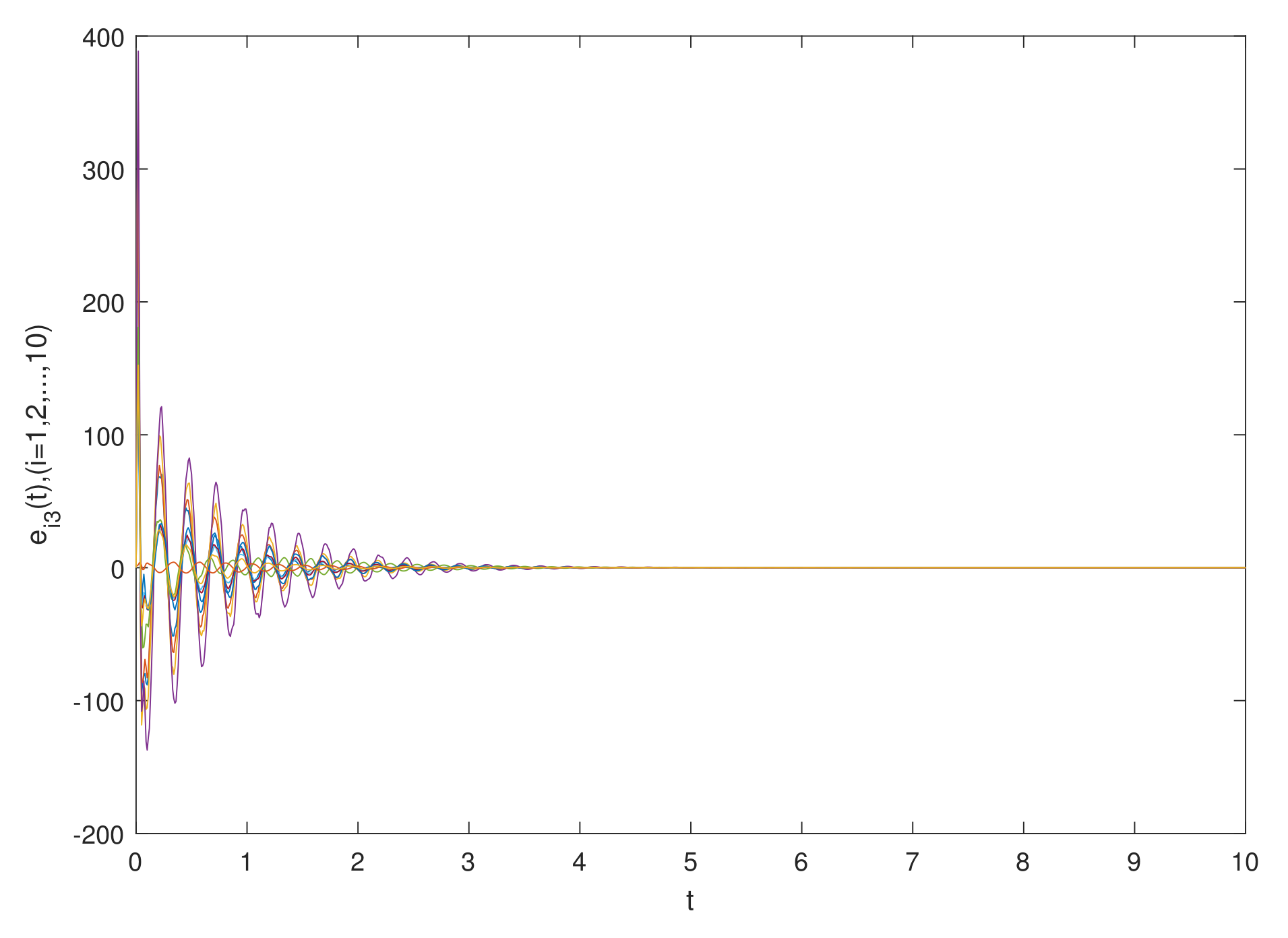
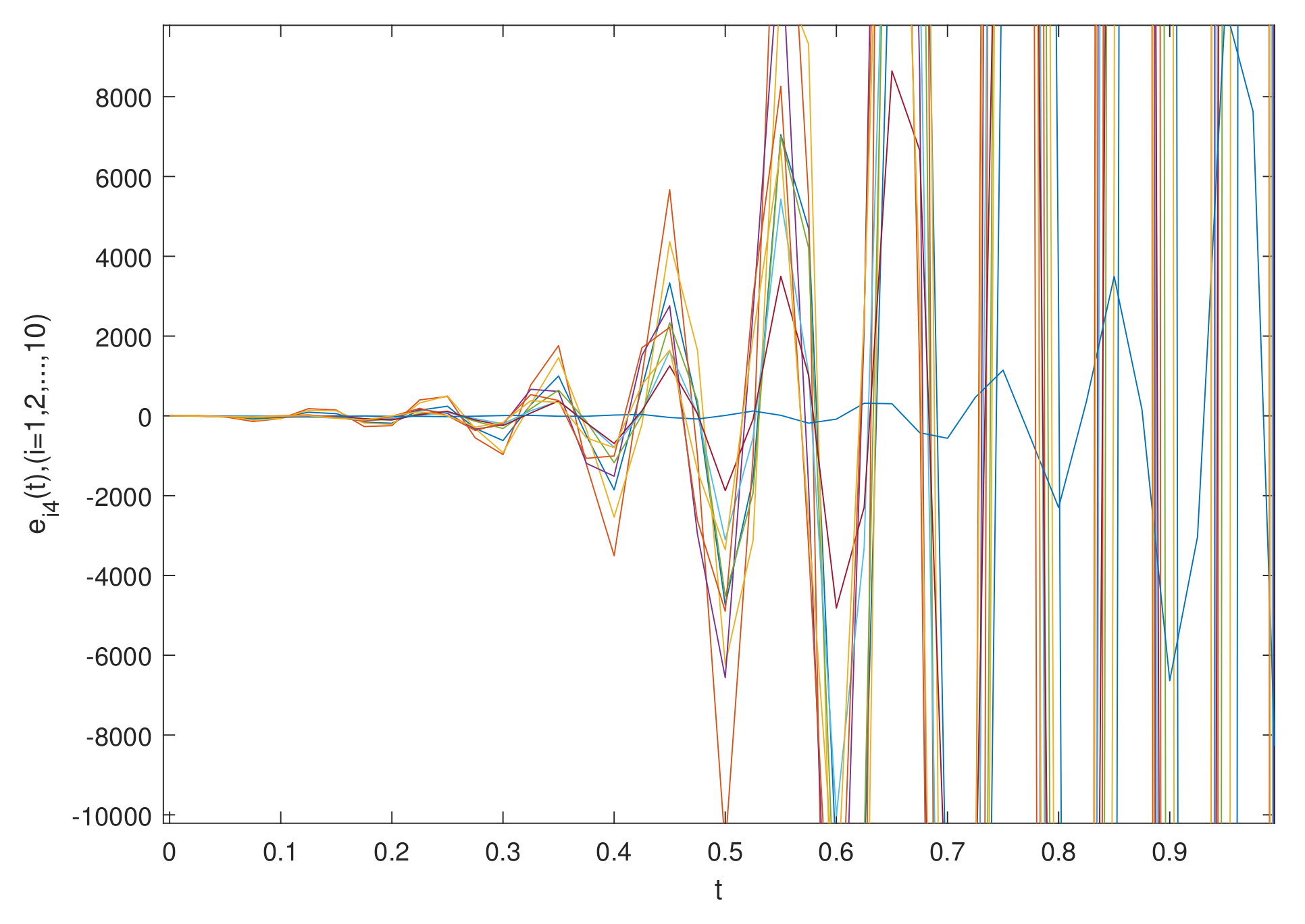
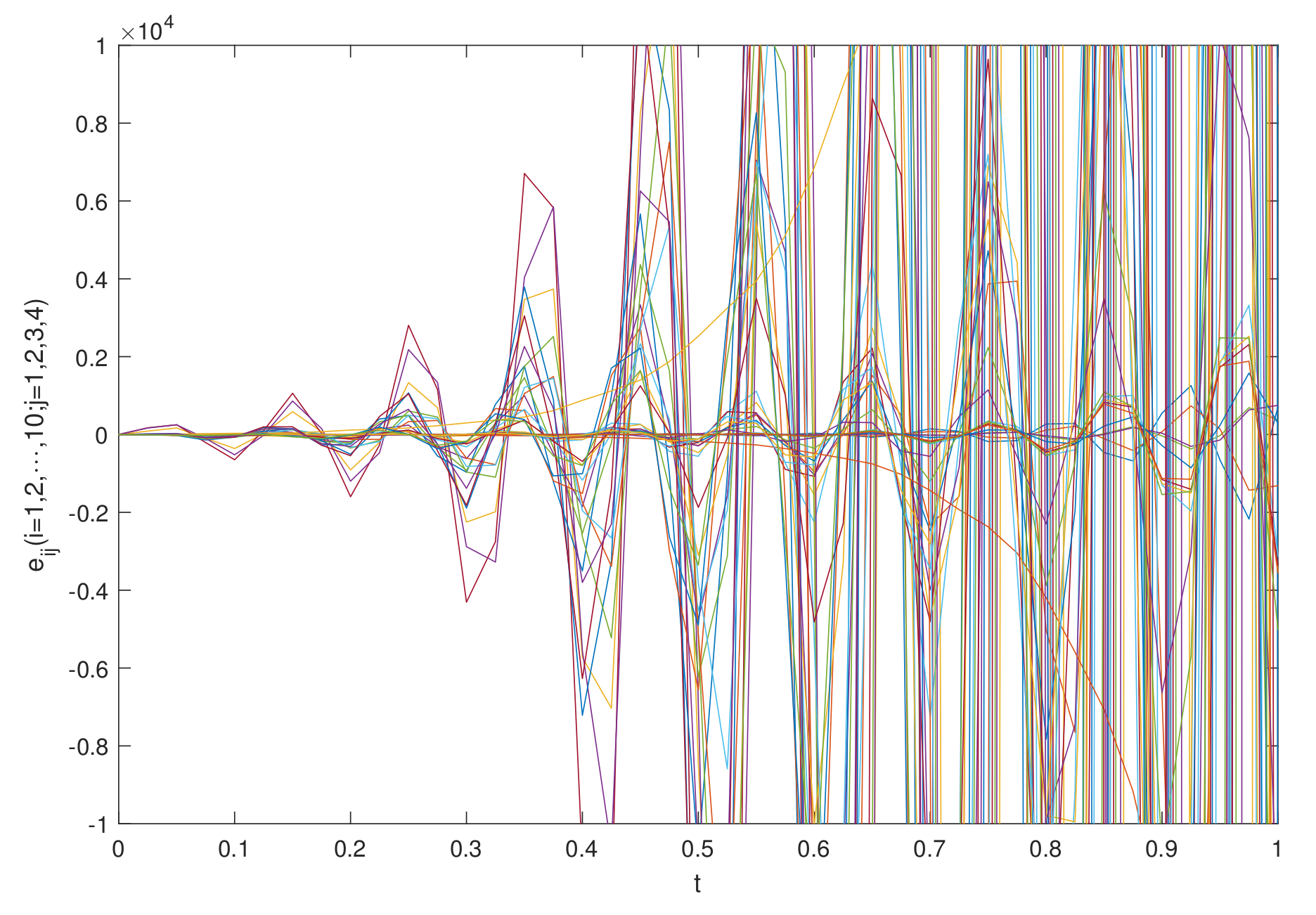
4. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Hackensack, NJ, USA, 2000. [Google Scholar]
- Bagley, R.L. On the Fractional Calculus Model of Viscoelastic Behavior. J. Rheol. 1998, 30, 133–155. [Google Scholar] [CrossRef]
- Ge, Z.M.; Jhuang, W.R. Chaos, control and synchronization of a fractional order rotational mechanical system with a centrifugal governor. Chaos Solitons Fractals 2007, 33, 270–289. [Google Scholar] [CrossRef]
- Huang, L.L.; He, S.J. Stability of fractional state space system and its application to fractional order chaotic system. Acta Phys. Sin. Chin. Ed. 2011, 60, 119419573. [Google Scholar] [CrossRef]
- Hudson, J.L.; Kube, M.; Adomaitis, R.A.; Kevrekidis, I.G.; Lapedes, A.S.; Farber, R.M. Nonlinear signal processing and system identification: Applications to time series from electrochemical reactions. Chem. Eng. Sci. 1990, 45, 2075–2081. [Google Scholar] [CrossRef]
- Argenti, F.; De Angeli, A.; Del Re, E.; Genesio, R.; Pagni, P.; Tesi, A. Secure communications based on discrete time chaotic systems. Kybernetika 1997, 1, 41–50. [Google Scholar]
- Gerhards, M.; Schlerf, M.; Rascher, U.; Udelhoven, T.; Juszczak, R.; Alberti, G.; Miglietta, F.; Inoue, Y. Analysis of Airborne Optical and Thermal Imagery for Detection of Water Stress Symptoms. Remote Sens. 2018, 10, 1139. [Google Scholar] [CrossRef]
- Lei, Y.; Zheng, W. Research on robot automation and control problems. World Inverters 2015, 3, 86–88. [Google Scholar]
- Boccaletti, S.; Latora, V.; Moreno, Y.; Chavez, M.; Hwang, D.U. Complex networks: Structure and dynamics. Phys. Rep. 2006, 424, 175–308. [Google Scholar] [CrossRef]
- Wang, Z.; Shu, H.; Liu, Y.; Ho, D.W.; Liu, X. Robust stability analysis of generalized neural networks with discrete and distributed time delays. Chaos Solitons Fractals 2006, 30, 886–896. [Google Scholar] [CrossRef]
- Barabâsi, A.L.; Jeong, H.; Néda, Z.; Ravasz, E.; Schubert, A.; Vicsek, T. Evolution of the social network of scientific collaborations. Phys. Astatistical Mech. Its Appl. 2002, 311, 590–614. [Google Scholar] [CrossRef]
- Melián, C.J.; Bascompte, J.; Jordano, P.; Krivan, V. Diversity in a complex ecological network with two interaction types. Oikos 2010, 118, 122–130. [Google Scholar] [CrossRef]
- Zio, E.; Golea, L.R.; Mrs, C. Identifying groups of critical edges in a realistic electrical network by multi-objective genetic algorithms. Reliab. Eng. Syst. Saf. 2012, 99, 172–177. [Google Scholar] [CrossRef]
- Ma, T.; Zhang, J. Hybrid synchronization of coupled fractional-order complex networks. Neurocomputing 2015, 157, 166–172. [Google Scholar] [CrossRef]
- Li, H.L.; Cao, J.; Hu, C.; Zhang, L.; Wang, Z. Global synchronization between two fractional-order complex networks with non-delayed and delayed coupling via hybrid impulsive control. Neurocomputing 2019, 356, 31–39. [Google Scholar] [CrossRef]
- Yang, L.X.; Jiang, J. Adaptive synchronization of drive-response fractional-order complex dynamical networks with uncertain parameters. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1496–1506. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, R.; Liu, C.; Duan, J. Projective synchronization via adaptive pinning control for fractional-order complex network with time-varying coupling strength. Int. J. Mod. Phys. C 2019, 30, 268–968. [Google Scholar] [CrossRef]
- Li, H.L.; Cao, J.; Jiang, H.; Alsaedi, A. Graph theory based finite-time synchronization of fractional-order complex dynamical networks. J. Frankl. Inst. 2018, 355, 5771–5789. [Google Scholar] [CrossRef]
- Wu, H.; Wang, L.; Niu, P.; Wang, Y. Global projective synchronization in finite time of nonidentical fractional-order neural networks based on sliding mode control strategy. Neurocomputing 2017, 235, 264–273. [Google Scholar] [CrossRef]
- Lin, D.U.; Yong, Y.; Lei, Y. Synchronization in a fractional-order dynamic network with uncertain parameters using an adaptive control strategy. Appl. Math. Mech. 2018, 39, 353–364. [Google Scholar]
- Shen, Y.; Li, C. LMI-based finite-time boundedness analysis of neural networks with parametric uncertainties. Neurocomputing 2008, 71, 502–507. [Google Scholar] [CrossRef]
- Wong, W.K.; Li, H.; Leung, S. Robust synchronization of fractional-order complex dynamical networks with parametric uncertainties. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4877–4890. [Google Scholar] [CrossRef]
- Li, H.J. State Estimation for Fractional-Order Complex Dynamical Networks with Linear Fractional Parametric Uncertainty. Abstr. Appl. Anal. 2013, 2013, 151–164. [Google Scholar] [CrossRef]
- Samli, R.; Yucel, E. Global robust stability analysis of uncertain neural networks with time varying delays. Neurocomputing 2015, 167, 371–377. [Google Scholar] [CrossRef]
- Ding, Z.; Shen, Y. Projective synchronization of nonidentical fractional-order neural networks based on sliding mode controller. Neural Netw. 2016, 76, 97–105. [Google Scholar] [CrossRef]
- Hu, T.; Zhang, X.; Zhong, S. Global asymptotic synchronization of nonidentical fractional-order neural networks. Neurocomputing 2018, 313, 39–46. [Google Scholar] [CrossRef]
- Suntonsinsoungvon, E.; Udpin, S. Exponential stability of discrete-time uncertain neural networks with multiple time-varying leakage delays. Math. Comput. Simul. 2020, 171, 233–245. [Google Scholar] [CrossRef]
- Aadhithiyan, S.; Raja, R.; Kou, B.; Selvam, G.; Niezabitowski, M.; Lim, C.P.; Cao, J. Asymptotic synchronization of fractional order non-identical complex dynamical networks with Parameter Uncertainties. Math. Methods Appl. Sci. 2022, 2022, 1–19. [Google Scholar] [CrossRef]
- Wei, J.; Pan, G. Design of a Sliding Mode Controller for Synchronization of Fractional-Order Chaotic Systems with Different Structures. J. Shanghai Jiaotong Univ. 2016, 50, 849–853, 860. [Google Scholar]
- Zeng, H.B.; He, Y.; Wu, M.; Xiao, H.Q. Improved Conditions for Passivity of Neural Networks With a Time-Varying Delay. IEEE Trans. Cybern. 2014, 44, 785–792. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Li, T.; Liu, D. Asymptotic Synchronization of Fractional-Order Complex Dynamical Networks with Different Structures and Parameter Uncertainties. Fractal Fract. 2022, 6, 441. https://doi.org/10.3390/fractalfract6080441
He X, Li T, Liu D. Asymptotic Synchronization of Fractional-Order Complex Dynamical Networks with Different Structures and Parameter Uncertainties. Fractal and Fractional. 2022; 6(8):441. https://doi.org/10.3390/fractalfract6080441
Chicago/Turabian StyleHe, Xiliang, Tianzeng Li, and Dehui Liu. 2022. "Asymptotic Synchronization of Fractional-Order Complex Dynamical Networks with Different Structures and Parameter Uncertainties" Fractal and Fractional 6, no. 8: 441. https://doi.org/10.3390/fractalfract6080441
APA StyleHe, X., Li, T., & Liu, D. (2022). Asymptotic Synchronization of Fractional-Order Complex Dynamical Networks with Different Structures and Parameter Uncertainties. Fractal and Fractional, 6(8), 441. https://doi.org/10.3390/fractalfract6080441