1. Introduction
Chaos, as a universal motion form of topological dynamical systems, is one of the core contents of the research for dynamical systems. At present, fruitful results of chaos theory have been obtained in autonomous discrete dynamical systems. However, many complex systems in real life, such as medicine, biology, and physics, are difficult to describe by autonomous systems. Therefore, it is necessary to use other models (for example, non-autonomous discrete systems). Since 1996, chaos of non-autonomous discrete dynamical systems (for convenience, we abbreviate it to NDDS) has began to be studied [
1]. In recent years, the discussion about the chaotic properties in NDDS has been active. Si [
2] gives some sufficient conditions for NDDS to have asymptotically stable sets. Lan and Peris [
3] showed the relation between the weak stability of an NDDS and its induced set-valued system. Li, Zhao, and Wang [
4] studied stronger forms of sensitivity and transitivity for NDDS by using the Furstenberg family. Meanwhile, under the condition
, a necessary and sufficient condition for
g to be
-mixing is established in [
5]. Vasisht and Das [
6] discussed the difference between
-sensitivity and some other stronger forms of sensitivity by some examples. Salman and Das [
7] proved that on a compact metric space, every finitely generated NDDS which is topologically transitive and has a dense set of periodic points is thickly syndetically sensitive. Vasisht and Das [
8] proved that if the rate of convergence at which
converges to
f is “sufficiently fast”, then various forms of sensitivity for the autonomous system
and the NDDS
coincide. For the chaoticity of other maps in NDDS, see [
9,
10,
11,
12] and other literature.
This paper further studies the chaotic properties in the sense of sensitivity. The basic definitions of chaos are given in
Section 2. In
Section 3, under the conditions of that,
are feebly open and uniformly converge to
,
for any
, and
. This paper proves that
is
-sensitive if and only if
is
-sensitive where,
is the supremum metric (see
Section 3),
-sensitive denotes one of the four properties: accessible, infinitely sensitive,
m-sensitive, and
m-cofinitely sensitive.
3. The Relation of Chaoticity between and Its Limit Map
Let
be the set of all continuous self-maps on
. For any
, the supremum metric (see [
4]) is defined by
This section will give equivalence of chaotic properties between
and
.
Lemma 1 ([
5]).
Let be an NDDS on a nontrivial compact metric space and . If for any , then for any , any integer and any integer one has Theorem 1. If are a feebly open mapping sequence which uniformly converges to f, for any , and , then is accessible if and only if is accessible.
Proof. Suppose that is accessible. Given , let are two nonempty open subsets in H. Because for any , by Lemma 1, for the above , for any and any integer . Moreover, because , then there is an integer such that for any . Combine with the arbitrariness of , one can get that . Because are feebly open, the interiors of and are nonempty sets. Let , be the interiors of and , respectively.
Because
is accessible, for the above
, there are
and
such that
for some
. Then, there exist
,
satisfying
,
. Thus,
. Noting that
for
, by triangle inequality, one has that
Hence, is accessible.
Now, suppose that is accessible. For a given , let be nonempty and open. Because , by Lemma 1, there is an integer such that for the above , , for any integer . Because are feebly open, then the interiors of and are nonempty sets. Let , be the interiors of and , respectively.
Because
is accessible for the above
, there are
and
such that
for some
. Then, there exist
,
satisfying
,
. Noted that
, by triangle inequality,
Hence, is accessible. □
Theorem 2. If is a feebly open mapping sequence which uniformly converges to f, for any , and , then is infinitely sensitive if and only if is infinitely sensitive.
Proof. Suppose that
is infinitely sensitive with
as an infinitely sensitive constant. Let
,
is a nonempty open set. Because
, by Lemma 1, there is an integer
such that
for any integer
,
and the above
. Taking an integer
satisfying
. Then, there is an integer
such that
for any integer
and
. Because
is feebly open (
), then the interior of
is nonempty. Let
be the interior of
. Because
is infinitely sensitive with infinitely sensitive constant
, then there is a
such that
. Because
and because
for any integer
. By triangle inequality,
Taking the upper limit of both sides of the inequality, one has that
Therefore, is infinitely sensitive.
Conversely, let be infinitely sensitive with as an infinitely sensitive constant. Let , be a nonempty open set. Because , by Lemma 1, there is an integer such that
for any integer , , and the above . Taking an integer satisfying . Then, there is an integer such that
for any integer
and . Because is feebly open (), the interior of is nonempty. Let be the interior of . Because is infinitely sensitive with as a sensitive constant, then there is a such that . So, there exist such that .
Noted that
for any integer
, then
for any integer
. By triangle inequality, one has that
Taking the upper limit of both sides of the inequality, one has that , . Consequently, is infinitely sensitive. □
Theorem 3. If is a feebly open mapping sequence which uniformly converges to f, for any , and , then is m-sensitive if and only if is m-sensitive.
Proof. Suppose that
is
m-sensitive with
m-sensitive constant
. Let
and a open set
. Because
, by Lemma 1, there is an integer
such that
for any integer
,
, and the above
. Taking
with
. Then, there is an integer
such that
for any integer
and
. Because
is feebly open for all
, the interior of
is nonempty. Let
be the interior of
. Because
is
m-sensitive with
m-sensitive constant
, there are
m points
and a
such that
Because
, there are
satisfying
and
And because
for any
. By triangle inequality,
This implies is m-sensitive.
Conversely, let
and
be an open set. Because
, by Lemma 1, there is an integer
such that
for any integer
, and the above
. Taking
with
. Then, there is an integer
such that
for any integer
and
. Because
is feebly open for all
, the interior of
is nonempty. Let
be the interior of
. Because
is
m-sensitive with
as a sensitive constant, there are
m points
and
such that
for any integer
. Because
, then there are
satisfying
. And because
for any
, then
for any
. By triangle inequality, one has that
Hence, is m-sensitive with as an m-sensitive constant. □
Theorem 4. If is a feebly open mapping sequence which uniformly converge to f, for any , and , then is m-cofinitely sensitive if and only if is m-cofinitely sensitive.
Proof. This proof is similar to that of Theorem 1, and hence is omitted. □
Example 1. Let H be the compact interval [0,1] and be defined by for any and In fact, for any nonempty open subset V of H, int . Then is feeble open. It is easy to know that, for any (without loss of generality, ), the following conclusions are held.
If
or
or
, one can get that
If
, one has
If
, one has
If
, one has
Taking
). Then, for any
,
. This implies that the map
is sensitive-dependent on initial condition. The computer simulation with explanation of chaotic behavior is provided in
Figure 1. The red dots and the green dots represent the trajectories of initial value
and
iterate for 3000 times, respectively. It can be seen that, after iteration, the orbit of
(or
) is ergodic and disorder (see red dots or green dots). And with little difference between initial values
and
, there is a big gap between the iterative values after 1995 times (see
,
). This means that
h is sensitive-dependent on initial condition.
Then, it can be proved that the system is infinitely sensitive, m-sensitive, and m-cofinitely sensitive.
Now, let and . Then the family consists of feebly open mappings converging uniformly to h. Obviously, is also infinitely sensitive, m-sensitive, and m-cofinitely sensitive. Thus, the system is conform to the assumption of Theorems 1–4.
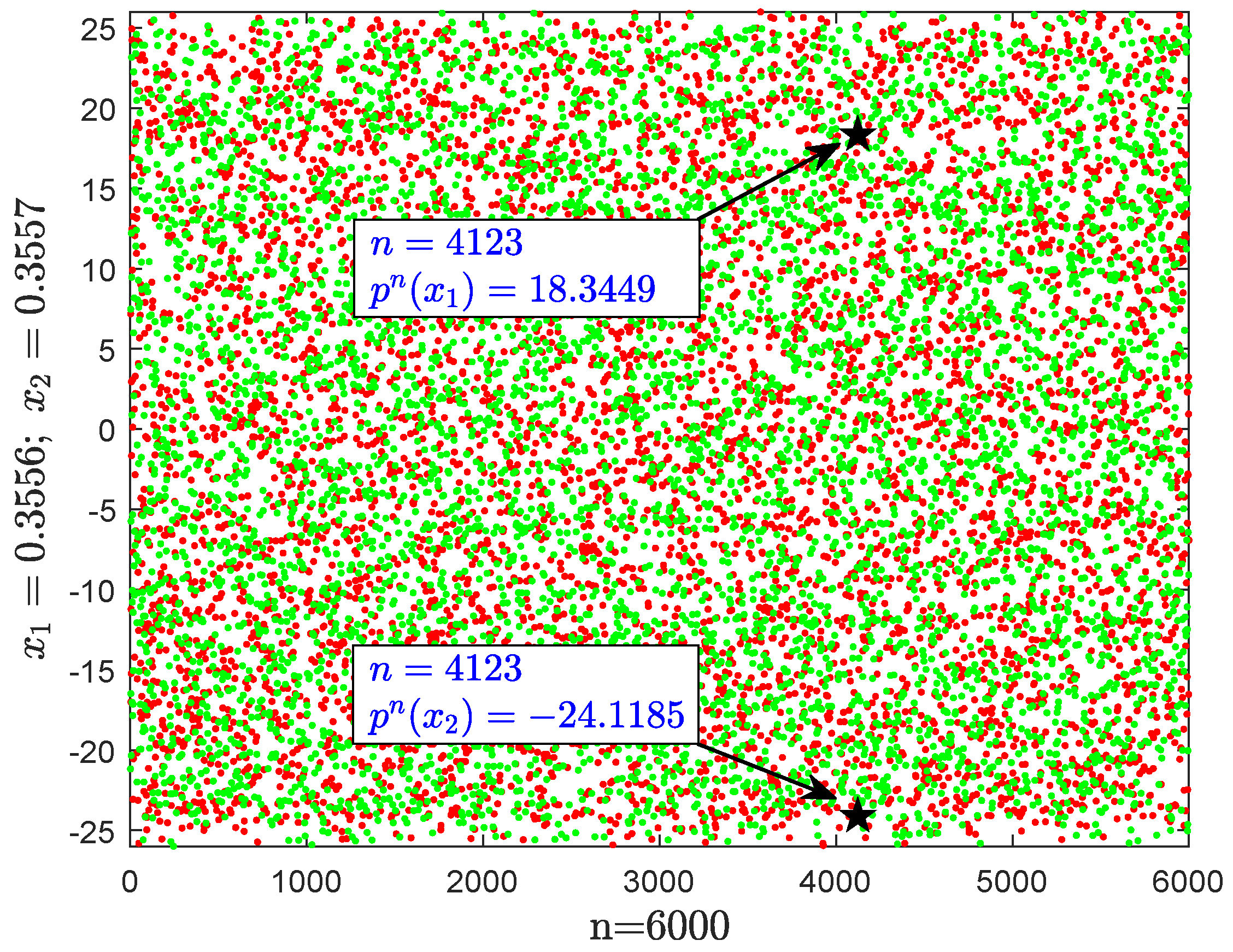
Example 2. Definingwhere, is the sawtooth function defined by One can prove that the map
satisfies the definitions of chaos in
Section 2. The computer simulation with explanation of chaotic behavior is provided in
Figure 2. The red dots and the green dots represent the trajectories of initial value
and
iterate for 6000 times, respectively. And with little difference between initial values
and
, there is a big gap between the iterative values after 4123 times (see
,
).
Now, let . Then are feebly open mappings which uniformly converge to p. Similar to Example 1, is infinitely sensitive, m-sensitive, and m-cofinitely sensitive.
Remark 1. The above discussion tells us that under some conditions, studying the effect of a series of disturbances on the system can be simplified to studying the effect of a single map (i.e., the limit map) on the system.



{kind=link}
{kind=link}

