1. Introduction
Spacecraft are the main carriers of space exploration missions, which have become complex and large-scale in recent years [
1,
2]. The spacecraft’s capacity and launch cost limit the spacecraft weight, such that large spacecraft always use lightweight materials to reduce the overall mass of the spacecraft. In general, large spacecraft with lightweight materials have strong flexibility.
In the modeling process of flexible spacecraft, the commonly used methods include the lumped parameter method, the distributed parameter method, and the finite element method. The lumped parameter method regards the spacecraft structure as a rigid body system composed of several springs and rigid bodies [
3]. Moreover, the flexible appendages of the spacecraft structure are expressed by adjusting the stiffness of the spring. Then, the spacecraft dynamical model can be established according to the multi-rigid-body dynamics. Some researchers have studied the modeling and dynamics of spacecraft with flexible appendages. Liu et al. [
4] studied the dynamic characteristics of the dual solar panel flexible spacecraft and discussed the rigid–flexible coupling effect between the attitude motion, structural deformation, and thermal load. Gasbarri et al. [
5] used the finite element method to study the modeling of multibody flexible spacecraft and the spacecraft dynamics in the form of the attitude coupling of complex spacecraft.
In the space environment, the spacecraft should be able to adjust its attitude to meet the stated mission. Attitude control of the spacecrafts is one of the most important aspects [
6]. The design of the attitude control indirectly determines the normal operation of a spacecraft in orbit. For example, a spacecraft equipped with flexible solar panels is a typical rigid–flexible coupling system [
7]. During the attitude adjustment of the spacecraft, the flexible solar panels vibrate and affect the spacecraft. If this rigid–flexible combination is not properly controlled, the normal operation of the spacecraft could be affected. Compared with rigid spacecraft, flexible spacecraft are more complicated to control because of the vibration of the flexible structure and the coupling between the central rigid bodies. Thus, the influence of the flexible appendages in spacecraft attitude control should be considered.
The spacecraft attitude control algorithm mainly uses relatively common algorithms, such as the PD control [
8,
9,
10]. The impact analysis of the external interference and flexible structure vibration is not comprehensive. With the increasing complexity of the spacecraft structure, it is difficult for the conventional PD control to meet the control requirements of the spacecraft. Without considering the influence of the flexible appendages’ vibration on the attitude of the spacecraft, the attitude control design could affect the operating state of the spacecraft and even lead to the instability of the spacecraft.
Fractional calculus is a generalization of the traditional integer calculus [
11,
12,
13]. To improve the control performance of the PD control, fractional calculus has been introduced into the traditional PD control. Safikhani et al. designed a non-overshooting fractional-order PD for special case of fractional-order plants [
14]. Saleem et al. proposed an intelligently optimized fractional-order PD controller of a rotary inverted pendulum [
15]. Celik provided a new fractional-order PD cascade controller for the advanced load frequency control of a power system [
16]. These references show the superiority of the fractional-order PD controller, which encourages the study of fractional-order PD attitude control for spacecraft with flexible appendages.
Motivated by the above discussion, this paper focuses on the design of a fractional-order PD controller for spacecraft with flexible appendages. Based on the lumped parameter method, the dynamical model of spacecraft with flexible appendages is discussed, as well as the transfer function of the attitude angle and external moment. Then, the fractional-order PD controller is designed according to the given gain crossover frequency and phase margin. In addition, the effectiveness of the obtained results is verified by a numerical simulation.
The rest of this paper is organized as follows: in
Section 2, some preliminaries are introduced, including the fractional derivative and fractional-order PD controller; then, the attitude control modeling of spacecraft with flexible appendages is proposed in
Section 3; a fractional-order PD controller and its design steps are given in
Section 4; an example is provided to verify the obtained results in
Section 5; finally, the conclusions are listed in
Section 6.
3. Attitude Control Modeling of Spacecraft with Flexible Appendages
In this section, a lumped parameter model of spacecraft with flexible appendages is proposed. Then, the corresponding attitude control model is constructed.
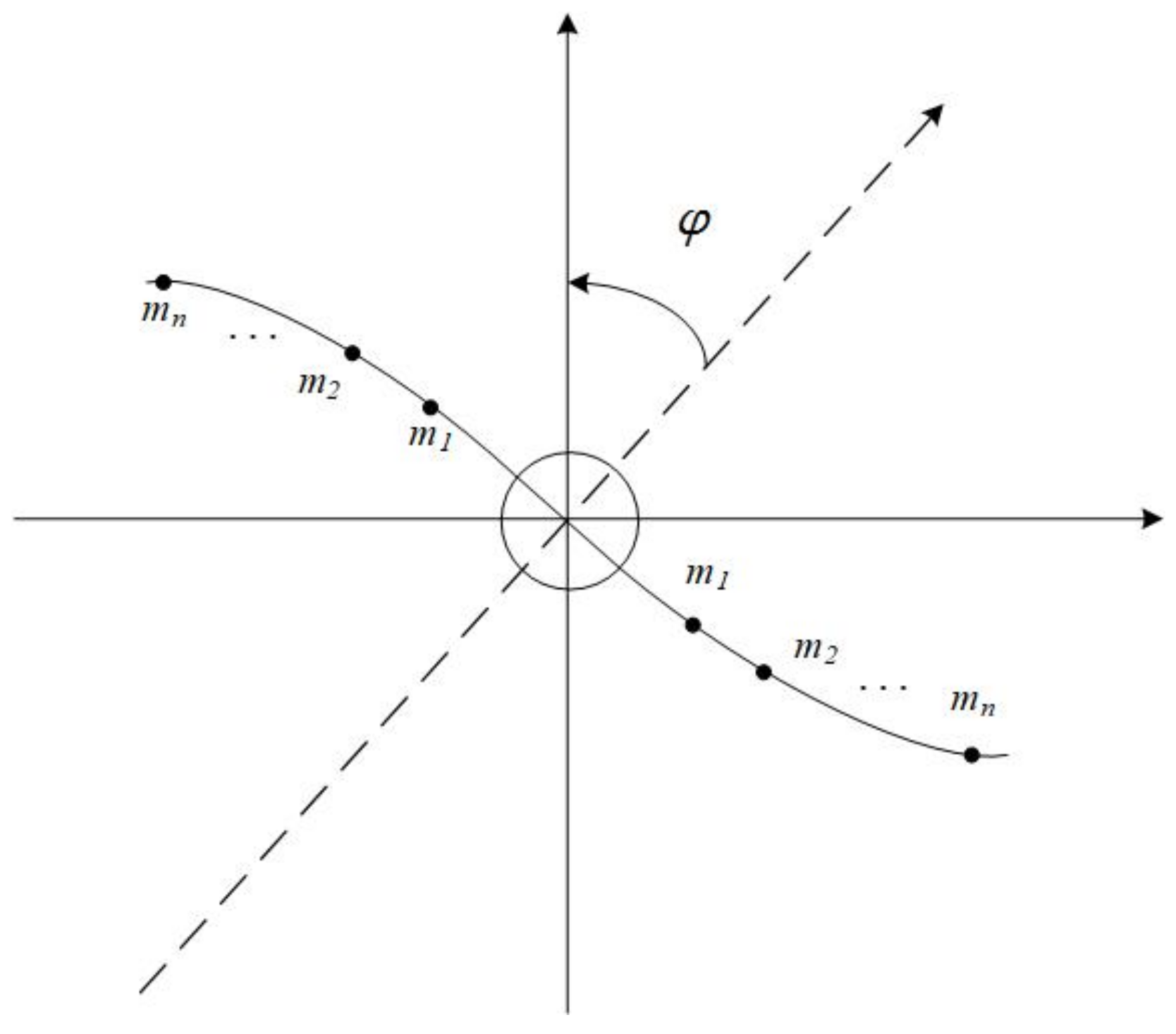
Figure 1 is the lumped parameter model of a spacecraft with flexible appendages, which assumes that one side of the flexible appendages has
n mass points
satisfying
where
is the attitude angle of the spacecraft, and
,
, and
are the velocity, position, and the elastic deformation of the mass point
, respectively.
According to the angular momentum theorem, we have
where
H is the angular momentum of the centroid of the spacecraft system,
T is the external moment, and
I is the moment of inertia of the spacecraft system satisfying
.
In addition, spacecraft with flexible appendages have a motion equation. For example, large-size solar panels always have flexibility due to the special material of metal–silicide composites. Given the bending rigidity
and structure distribution, the motion equation of the spacecraft system can be obtained as
where
,
,
is the mass matrix of the flexible appendages, and
is always symmetric and denotes the stiffness matrix of the flexible appendages. In addition, the flexible appendages are assumed to be undamped.
Equations (
13) and (
14) imply
Equivalently, we obtain
where
Q is also a real symmetric matrix satisfying
Because
Q and
C are both real symmetric invertible matrices, there exists a matrix
K, which is able to diagonalize
Q and
C, i.e.,
Substituting an alternative,
, Equations (
13) and (
17) can be respectively rewritten as
where
. Then, the Laplace transforms of Equations (
18) and (
19) are obtained;
Obviously, the transfer function of the attitude angle
and external moment
T is given as
where
and
are both polynomial functions of
s.
According to the fractional-order PD controller (
11), the open-loop
and closed-loop
transfer functions of the controlled system are proposed, respectively,
The attitude control model of spacecraft with flexible appendages is given as the above Equations (
23) and (
24). How to design the control parameters
,
, and
of the fractional-order PD controller (
11) is discussed in the next section.
4. Fractional-Order PD Controller Design
In this section, a design method for the fractional-order PD controller for the attitude control of spacecraft with flexible appendages is presented. As we know, the gain crossover frequency and phase margin are the two main indices for a controlled system. The gain crossover frequency is the frequency at which the amplitude frequency curve intersects the 0dB. When the crossing frequency is higher, the response speed becomes faster. The phase margin is the maximum phase allowed to increase through the frequency point. The ideal value of the phase margin is from
to
. To achieve the desired control performance, the gain crossover frequency
and phase margin
should be set in advance, whose definitions are described by
Then, according the the open-loop (
23) and closed-loop (
24) transfer functions of the controlled system, we have
Due to Equation (
22),
and
are rewritten, respectively, as
Substituting Equation (
27) into Equation (
26), we have
where
Equivalently, Equation (
28) gives
which obtains the solutions of
and
:
Based on Equation (
31), the proportion coefficient
and differentiation coefficient
both depend on the fractional order
given the gain crossover frequency
and phase margin
. Then, the fractional order
should be determined. The use of the fractional order
instead of the integer order leads to better results, since the fractional order has an extra degree of freedom. Thus, an additional error evaluation method is given. To obtain better control performance, an error evaluation method is always used to minimize the control error. The common error evaluation methods include the maximum absolute error (MAE), integral absolute error (IAE), integral time-weighted absolute error (ITAE), integral squared error (ISE), and the integral time-weighted squared error (ITSE), and the corresponding objective functions are listed as follows:
where
is the control error. In this paper, the ITAE is utilized to calculate the optimal fractional order
. Then, combining Equation (
31), all the control parameters
,
, and
can be determined. The detailed design steps are given as follows.
The design method of the fractional-order PD controller for the attitude control of spacecraft with flexible appendages has three steps.
According to Equations (
12)–(
22), we calculate the open loop
in Equation (
23) and
in Equation (
27). Then, we obtain the parameters
,
, …,
and
,
, …,
.
Given the gain crossover frequency
and the phase margin
, we determine the expressions of
and
based on Equation (
31). We substitute Equation (
31) into Equation (
24) and obtain the closed-loop transfer function with only one independent variable
.
We select the ITAE in Equation (
32) and calculate the optimal
, which can obtain the minimum of the ITAE objective function. We determine
and
according to Equation (
31).
5. Numerical Simulation
In this section, a numerical example is given to demonstrate the effectiveness of the proposed fractional-order PD attitude control method of spacecraft with flexible appendages.
We assumed that the flexible appendages had two mass points, i.e.,
in Equation (
12). The two mass points were both
kg. The length of the flexible appendages on one side was
m, and the positions of the two mass points
,
were
m and
m, respectively. The bending rigidity was selected as
N·m
, and the moment of inertia of the spacecraft system was
I = 50 kg·m
. Obviously, Equation (
13) became
and the mass matrix
M of the flexible appendages was
The bending equations in
and
were listed, respectively, as
Combined with the initial value conditions, we obtained
Then, the stiffness matrix of the flexible appendages was calculated as
Thus, the motion equation of the spacecraft system (
14) became
The equivalent Equation (
16) was obtained, and the corresponding parameters were
In this case, the parameter
B in Equation (
18) was determined as
According to Equation (
22), the transfer function of the attitude angle and external moment was given as
Equivalently, the polynomial functions
and
were obtained as
According to the steps of the proposed fractional-order PD controller, we chose the gain crossover frequency
and phase margin
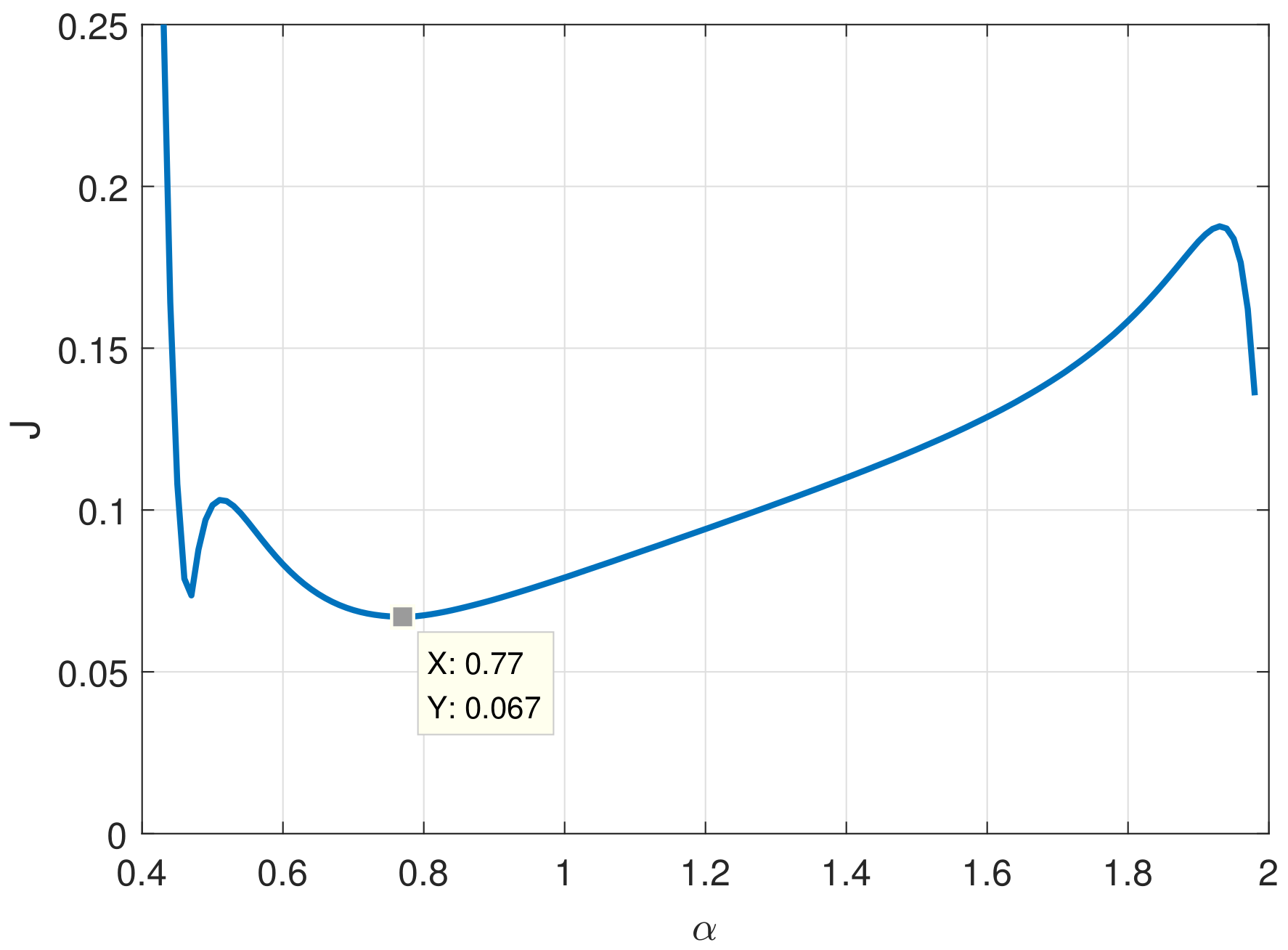
. We selected the ITAE in Equation (
32) and calculated the optimal
; the relationship between the ITAE and order
is shown in
Figure 2. The minimum of the ITAE objective function was 0.067 with the optimal order
. Based on Equation (
31), the optimal control parameters were obtained as
To compare the control performance, the traditional integer-order PD controller was used as a reference. The fractional-order PD control process was numerically simulated by the FOTF Toolbox in MATLAB Simulink. From Equation (
31), the corresponding parameters of the integer-order PD controller were
and
with
. The Bode diagrams under fractional-order and integer-order PD controllers are both shown in
Figure 3 and
Figure 4. Obviously in
Figure 3 and
Figure 4, the proposed PD controller satisfied the given gain crossover frequency
Hz and phase margin
rad.
To check the stability of the closed-loop system under the fractional-order PD controller, the corresponding root locus is shown in
Figure 5. Obviously, the whole root locus was located in the lefthalf plane, which ensures the stability of the controlled system. In addition, the Nyquist diagram under the fractional-order PD controller is given in
Figure 6. The Nyquist curve did not circle the critical point
, which benefits the dynamics analysis of the closed control loop.
Moreover, the step responses under the fractional-order and integer-order PD controllers are given in
Figure 7. According to
Figure 7, the control performance under the fractional-order PD controller had higher error precision, smaller overshoot, and a faster response time, which verified the effectiveness of the proposed fractional-order PD attitude control for spacecraft with flexible appendages.
6. Conclusions
In this paper, a fractional-order PD attitude control method for spacecraft with flexible appendages was proposed. Firstly, a lumped parameter model of spacecraft with flexible appendages was obtained based on the angular momentum theorem and motion equation. Then, the transfer function of the attitude angle and external moment was determined according to the lumped parameter model. The design steps of the fractional-order PD control were listed. With the given gain crossover frequency and phase margin, the relationships of the control parameters were obtained. In addition, the optimal control parameters were calculated by choosing the minimum of the ITAE objective function. Finally, a numerical example was given to illustrate the effectiveness of the obtained control method. The numerical results showed that the fractional-order PD had higher error precision, a smaller overshoot, and a faster response time, which would improve the attitude control performance of spacecrafts with flexible appendages.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}