1. Introduction
From the middle of the last century, the theory of fractional calculus and its applications have attracted much attention and stimulated scholars’ interest. Currently, fractional calculus has been applied to different science and engineering fields to describe memory phenomena, intermediate processes, hereditary properties, and complex phenomena [
1,
2,
3,
4,
5,
6,
7,
8,
9]. In particular, fractional calculus has been applied to the mathematical modelling of viscoelastic materials. For some viscoelastic materials, the stress–strain relation can be more accurately described by introducing fractional derivatives [
3,
4,
5,
10,
11,
12].
Scott-Blair [
10] introduced the fractional derivative to characterize a viscoelastic body whose mechanical properties are intermediate between a pure elastic solid (Hooke model) and a pure viscous fluid (Newton model). Such a fractional element was called a spring-pot in [
12] or the Scott-Blair model in [
3]. If an oscillator connects with such viscoelastic material, then the resistance term may be built up resorting to the fractional derivative, called a fractional oscillator. In [
13], relaxation, creep, dissipation, and hysteresis resulting from a six-parameter fractional constitutive model were considered.
Fractional oscillation was considered by Bagley and Torvik [
14], Beyer and Kempfle [
15], and others [
16,
17,
18,
19,
20]. In [
14], a fractional equation describing the in-plane oscillations of a rigid plate immersed in a Newtonian fluid was established. In [
15], the uniqueness and causality for the solution of the fractional oscillation equation were explored with the help of the Fourier transformation and frequency domain analysis. Achar et al. [
16] studied the fractional oscillation equation in the form of the fractional integral. We notice that the fractional oscillation equation considered in [
16] is a two-term-equation without the second order derivative. In [
17], oscillator equations derived from the relaxation kernel and the creep kernel were considered based on the fractional calculus Kelvin–Voight model, Maxwell model, and standard linear solid model, respectively. In [
17,
18,
19], the Bromwich’s integral formula of inverse Laplace transform and the residue theorem were used for the solutions of fractional oscillation equations. In [
20], three classes of fractional oscillators with the Weyl fractional derivative were investigated. In [
21], the stability of the linear fractional oscillator with the Caputo fractional derivative was explored based on the stability switch. For detailed discussions of fractional oscillator systems and their applications, readers may refer to the recent monograph [
9]. In [
22], the viscous inertia described by the fractional derivative was reported. In [
23,
24], nonlinear oscillators were considered for their dynamical behaviour, resonance phenomena, bifurcation, and chaos. In [
25], vibration theory with variable-order fractional forces was proposed.
Next, we recall the definitions of the involved fractional integral and derivative. For additional details, we refer the readers to [
1,
2,
3,
4,
5,
6]. Let
satisfy
for
and be piecewise continuous on
and integrable on any finite subinterval of
. Then, the Riemann–Liouville fractional integral of
of order
is defined as the convolution
where
is Euler’s gamma function. The Riemann–Liouville fractional derivative of order
(
) is defined as a composition of the
mth derivative and
-order integral,
Exchanging the order of the derivative and integral in Equation (
2) leads to the definition of the Caputo fractional derivative. The Riemann–Liouville fractional derivative has weaker requirements for the function
than the Caputo fractional derivative. In this paper, the Riemann–Liouville fractional derivative is used to model the fractional oscillation. We use the Laplace transform
Then, the Laplace transform of the Riemann–Liouville fractional derivative is
In this paper, by using two different methods of inversion Laplace transform, we consider the impulse response of the fractional oscillation equation
where
satisfies
,
is the Dirac-
function, and
when
. We note that in [
11,
14], the cases of
and
were introduced, respectively.
Applying the Laplace transform to Equation (
4) leads to
Solving the transform function, we have
For the integer-order case
, using the Laplace transform table, we can obtain the response in three subcases, i.e., overdamping, criticaldamping, and underdamping:
We note that the three subcases correspond to the Laplace transform having two real simple poles, one real second-order pole, and a pair of complex conjugate simple poles, respectively, in the s-plane.
For the integer-order cases
and
, making use of the Laplace transform table, the responses are obtained as the periodic oscillations
Starting from Equation (
5), we use two different methods of inverse Laplace transform to give two different forms of the response. One is in a series form constituted with positive powers of
t and converges rapidly for small
t, while another is the sum of a harmonic damped oscillation and a decayed function in the form of an infinite integral, where the infinite integral converges rapidly for a large
t and is appropriately evaluated by using the Gauss–Laguerre quadrature formula. The text is organized as follows. In the next section, we present the response rapidly convergent for a small
t. In
Section 3, we derive the response rapidly convergent for a large
t.
Section 4 presents our conclusions.
2. Solution Rapidly Convergent for Small t
We decompose the right hand side of Equation (
5) to a series of negative powers of
s and then use the inversion method term by term. We will apply the expansion formula of power series twice, and such expansions work for such large
as specified below. The present method is based on that of the Green’s function for fractional differential equations [
4].
First, we can rewrite
in the form
and expand the right hand side as
Sufficient conditions for the above expansion to hold are
Furthermore, we rewrite Equation (
10) as
By using the formula
expanding the right hand side of Equation (
12) yields the series of negative powers of
s,
where the expansion holds for
s satisfying the conditions
Now, taking the inverse Laplace transform to Equation (
14) term by term, we obtain the response in the series form constituted with positive powers of
t,
By setting
, Equation (
16) has the form
Here, the series converges rapidly for a small
t, and the response has the asymptotic behaviour
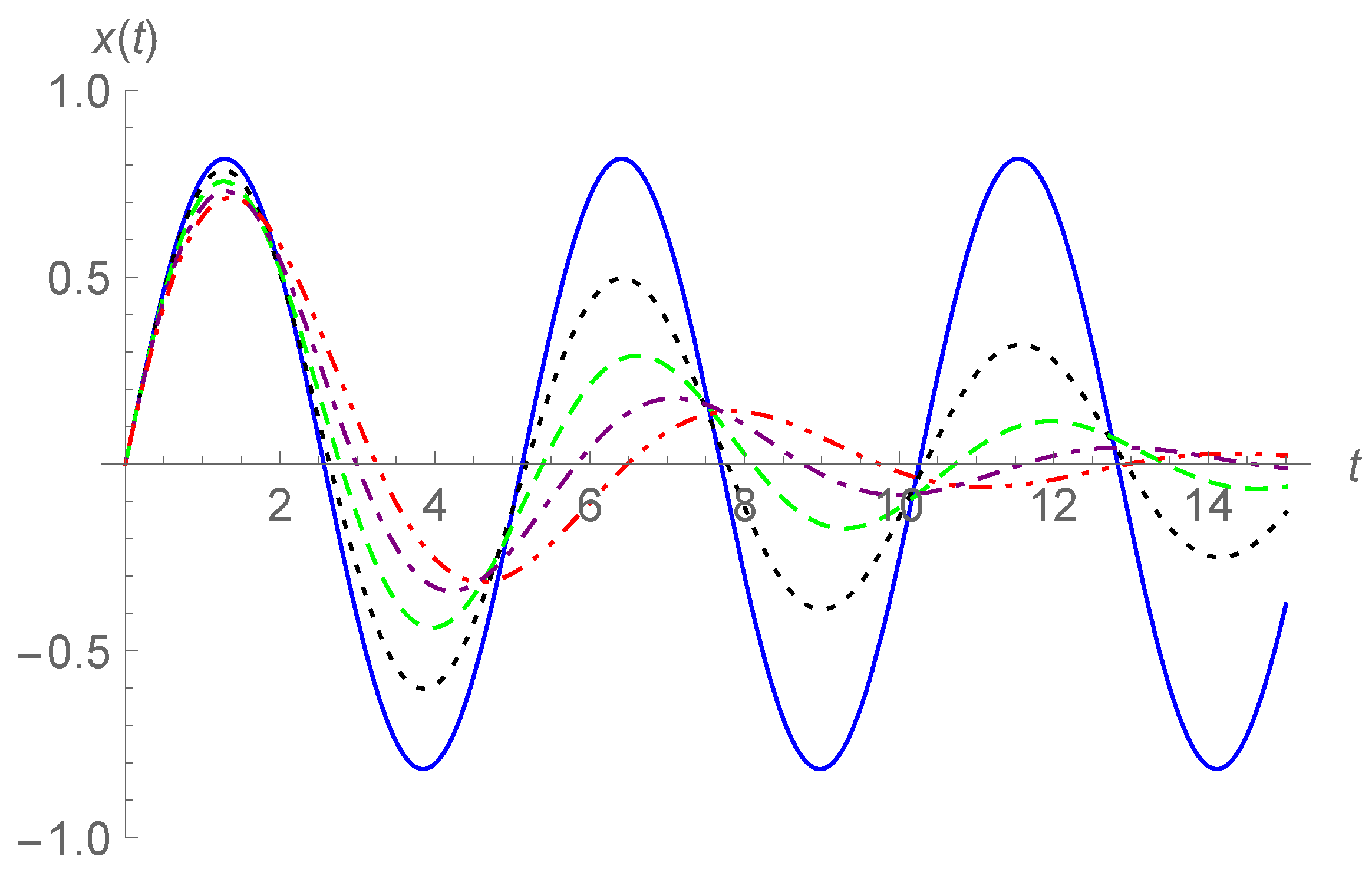
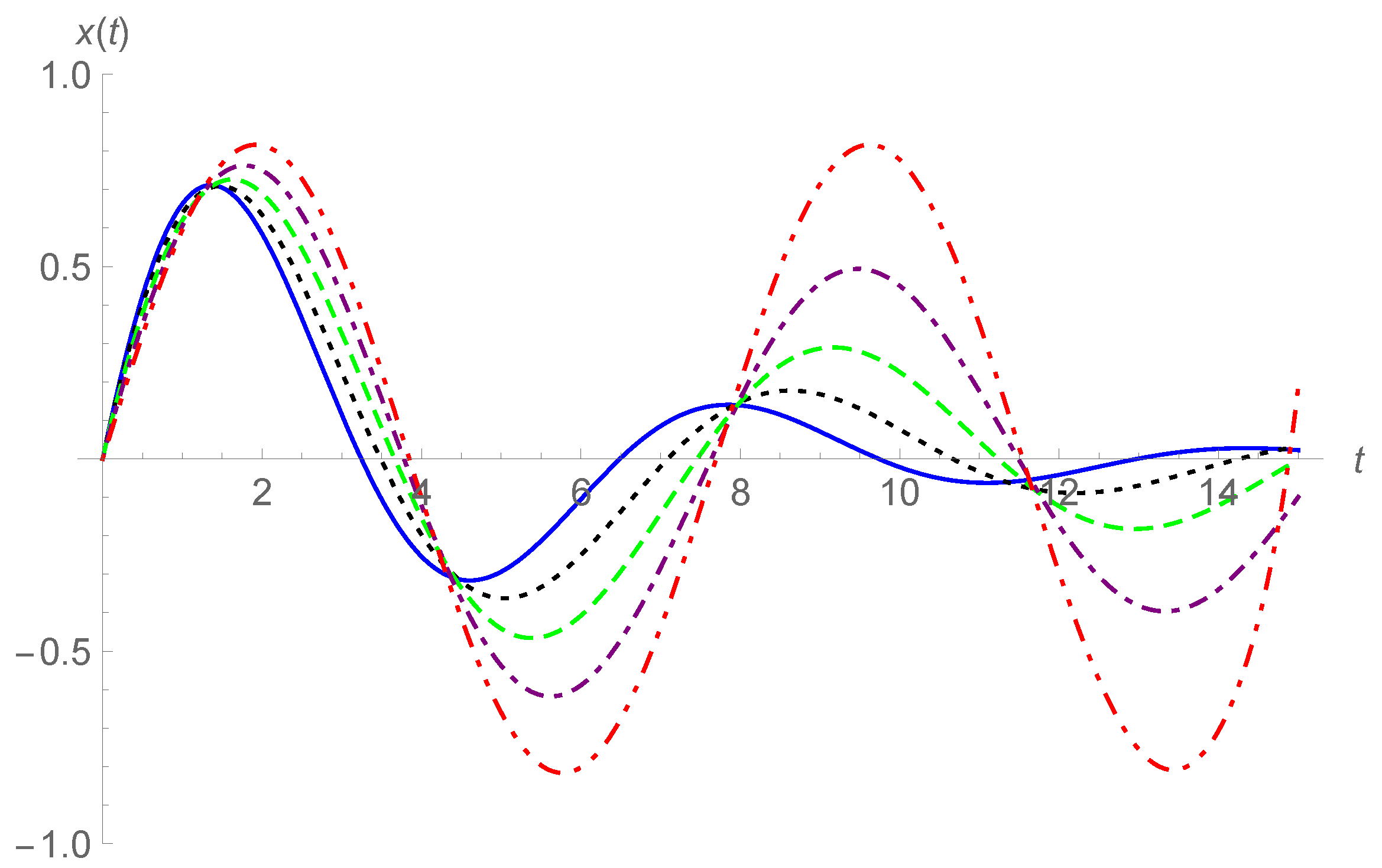
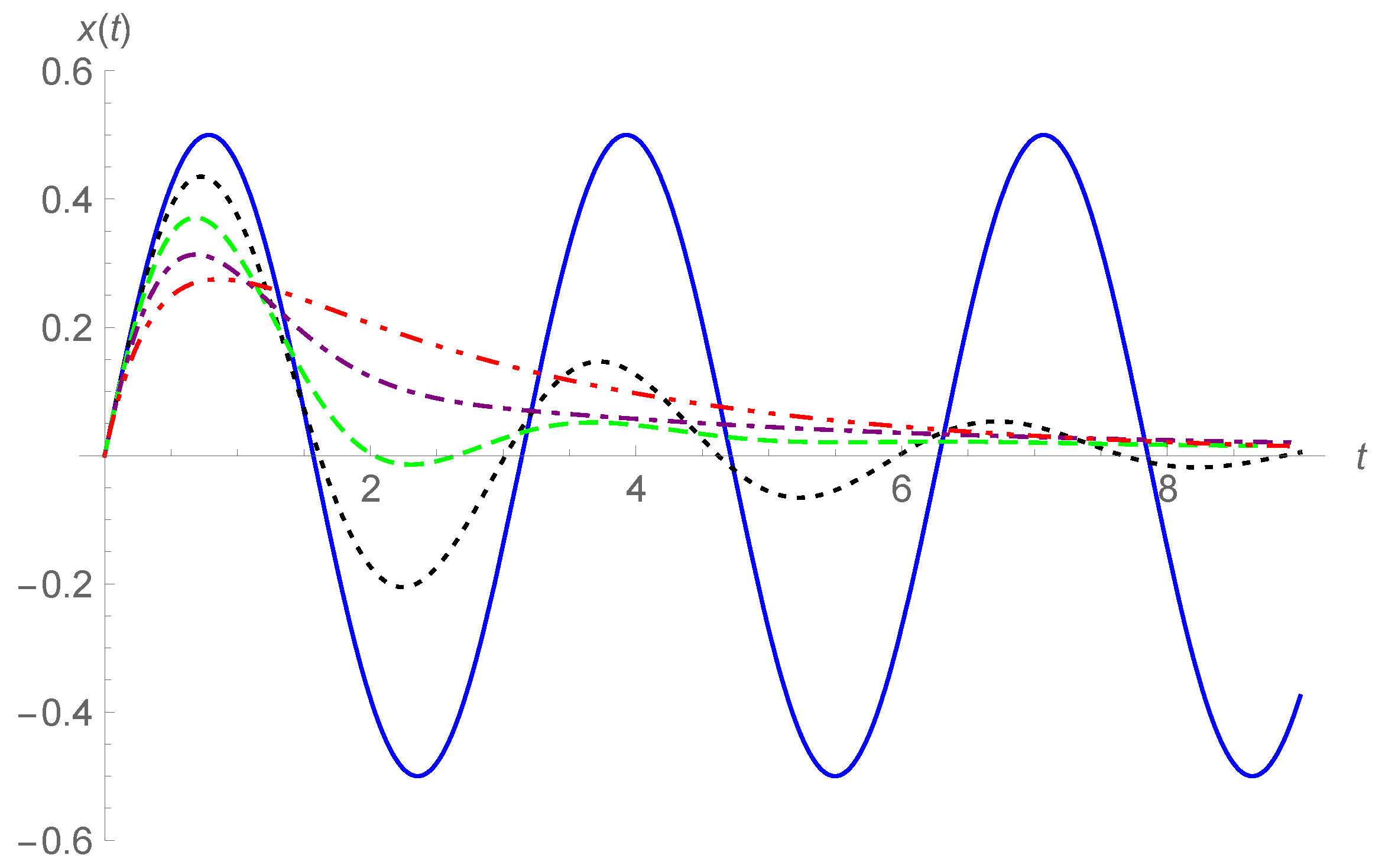
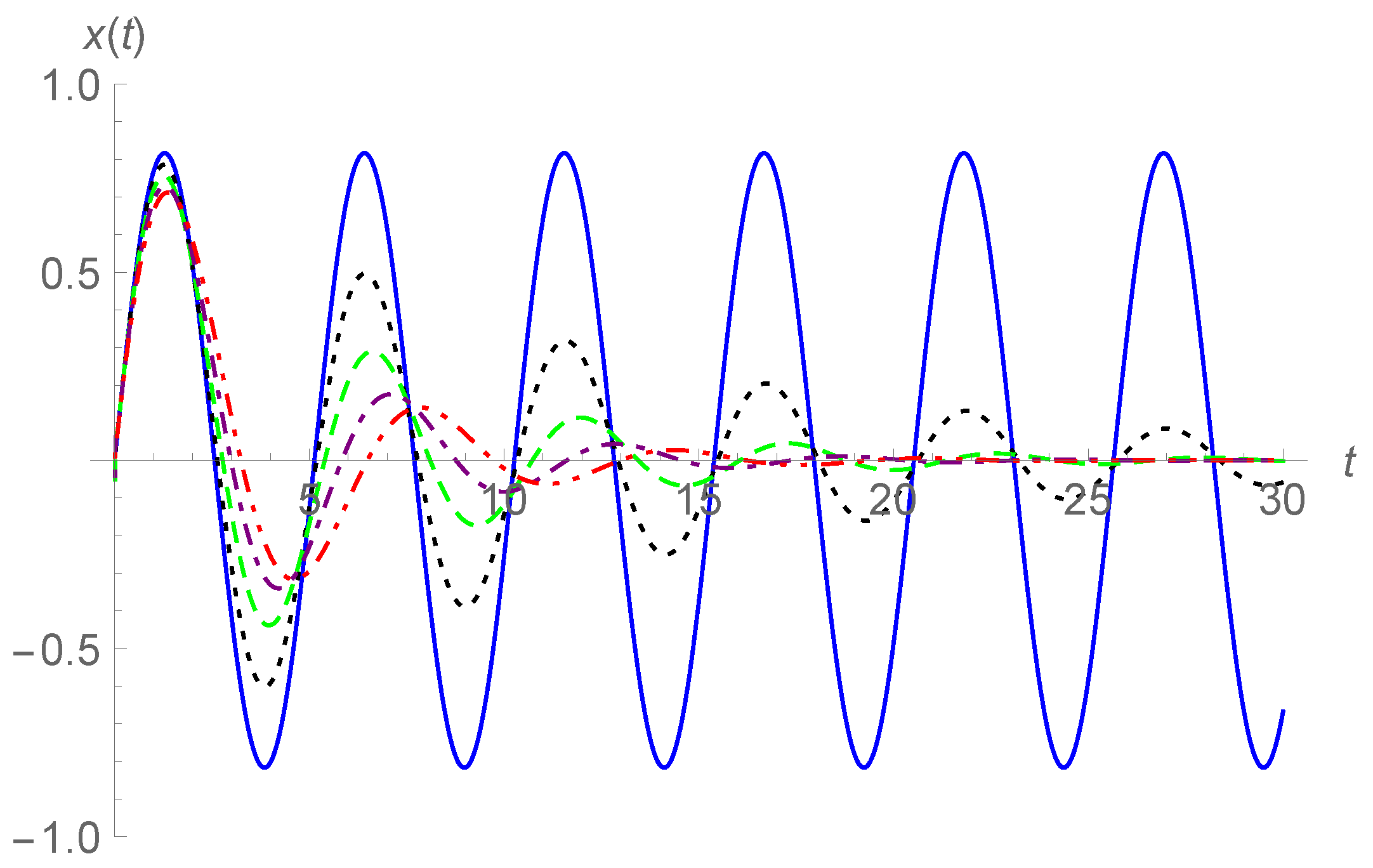
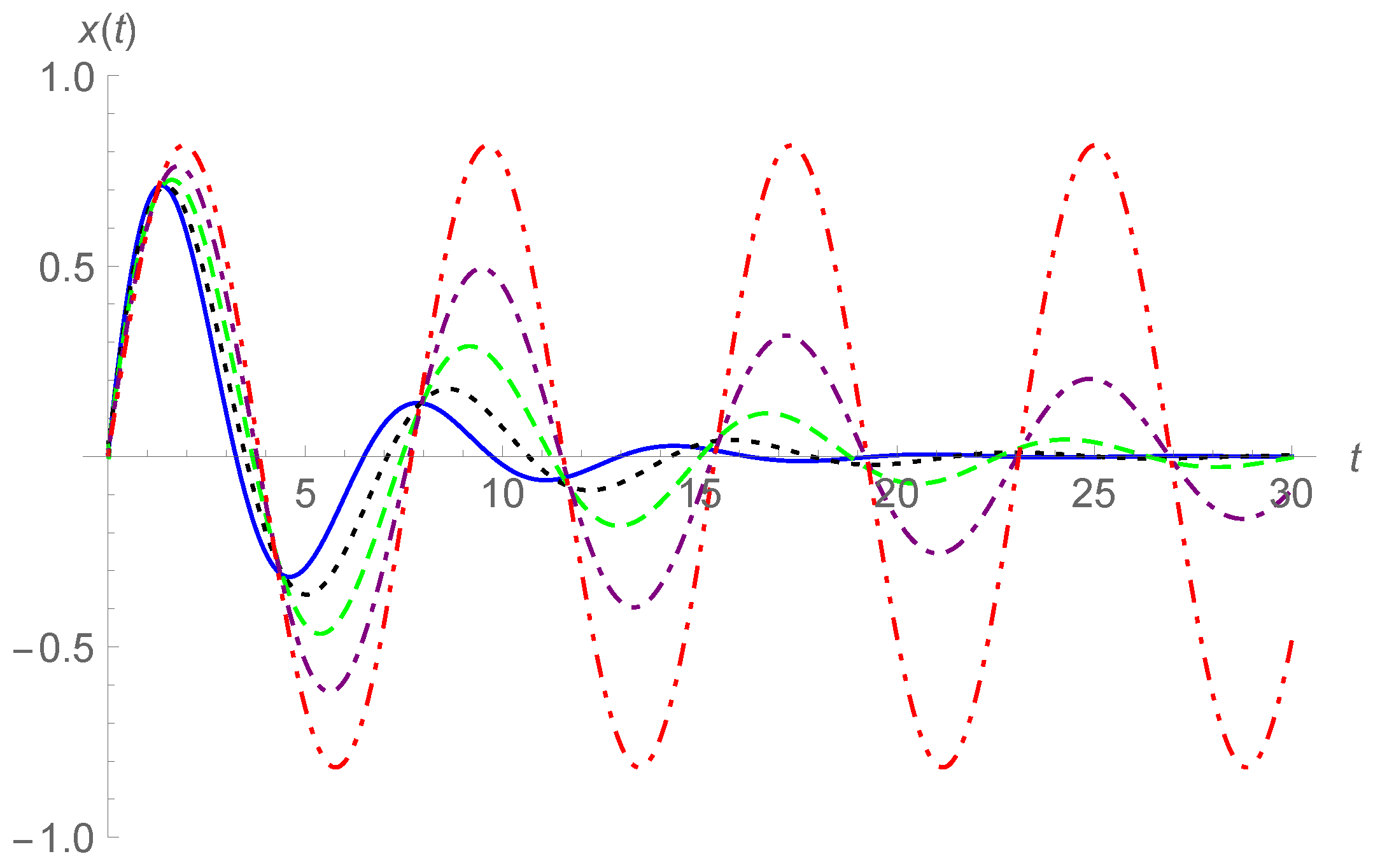
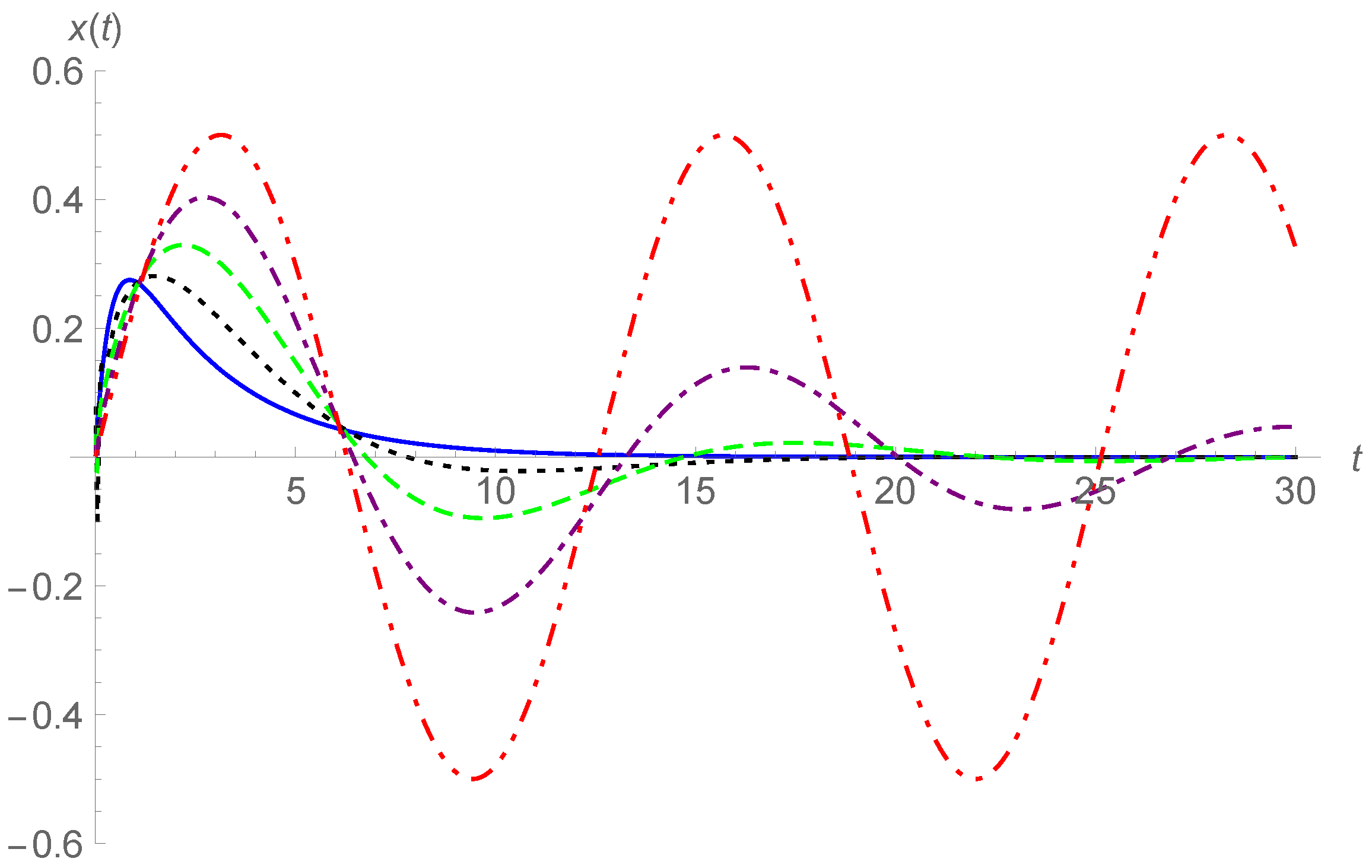
By taking
and the sum of
through
in Equation (
17), the curves of
are plotted in
Figure 1 and
Figure 2 for
and different values of
, and in
Figure 3 for
and
, and 1. In
Figure 1 and
Figure 2, the ranges of
t are limited in
, and in
Figure 3, the range is
. For extended ranges of
t, divergent curves may be observed. In addition, we did not plot curves of
and
since in this case, convergence of the series slows down, especially for the case of
approaching 2.
We notice that the formula for the Mittag–Leffler function
where the two-parameter Mittag–Leffler function is defined as
Thus, the response (
16) may be expressed as
The Integer-Order Cases
When
, the response in Equation (
17) can be expressed by using the Kummer hypergeometric function
Here, we obtain the united series expressions for the three subcases, overdamping, criticaldamping, and underdamping, by exploiting the Kummer hypergeometric function. In
Figure 4, the sum of the first 81 terms in Equation (
22) is used to generate the curves of
, where
c = 3, 2, and 1 correspond to overdamping, criticaldamping, and underdamping, respectively.
For the case
, upon using the binomial theorem, Equation (
17) becomes
which is consistent with Equation (
7).
For the case
, Equation (
16) is convergent under the condition
, and upon using the series expansion (
13), it is reduced to the periodic oscillation as in Equation (8):
3. Solution Rapidly Convergent for Large t
We pursue the inverse Laplace transform of Equation (
5) by using the complex inversion integral formula, alias Bromwich’s integral formula,
In the above formula, Br denotes the Bromwich path, namely the straight line from to , where is chosen so that all the singularities of the integrand lie to the left of the line.
For the non-integer case, the original point
is a branch point of the integrand. We make a branch cut along the negative real axis and consider the problem on the principal Riemann surface. In addition, for the non-integer case, the Laplace transform
always has a pair of conjugated simple poles with a negative real part, i.e., the characteristic equation
has a pair of conjugated complex roots only if
[
18,
19]. We denote the conjugated complex roots by
, where
and
.
Due to the residue theorem and Jordan’s lemma, we can rewrite the right hand side of Equation (
25) as the sum of residues plus a Hankel contour integral, i.e.,
where
where Ha denotes the Hankel path, a loop which starts from
along the lower side of the negative real axis, encircles the origin counterclockwise, and ends at
along the upper side of the negative real axis.
Calculating the residues in Equation (
27), we obtain
Considering the relation
, we have
where
denotes the real part. Utilizing the relation
we rewrite Equation (
28) as
Substituting
, using the equality
, and then extracting the real part, we obtain
where
Obviously, in the fractional case,
represents a harmonic damped oscillation. We note that for the case of
and
,
must be replaced by the expressions in (
6).
For
, the Hankel path integral may be divided into three parts:
where the integral paths are explained as follows: in the first integral, the path is from
to
∞ along the upper side of the negative real axis; in the second integral, the path is from
to 0 along the lower side of the negative real axis; and in the third integral, the path is the small circle counterclockwise:
Considering the two terms in brackets are conjugated we have
where
denotes the imaginary part. Calculating the imaginary part leads to
where
The infinite integral in Equation (
37) converges rapidly for a large
t due to the negative exponential function
in the integrand. It is easy to conclude from Equations (
37) and (
38) that when
,
is positive and decreases monotonically and approaches to zero as
, and when
,
is negative and increases monotonically and approaches to zero as
. When
,
is completely monotone, i.e.,
for all
. When
,
is completely monotone.
We notice that the infinite integral in Equation (
37) is in the Laplace pattern, and
has the asymptotic expression
Thus, the asymptotic behaviour of
is obtained upon using the Watson lemma
Hence, the response
is a superposition of a damped oscillation dying out in a negative exponent rate and a monotonic restoration decaying in a negative power rate,
The derivatives of have almost the same formations. Therefore, considering that the negative exponent function is an infinitesimal of higher order than the negative power function as , it is deduced that the response has the same asymptotic behaviour as , and evolves from initially probably oscillating to decreasing monotonically and approaching zero for the case , while increasing monotonically and approaching zero for the case .
Although the infinite integral in Equation (
37) can be directly computed by using MATLAB or MATHEMATICA, we prefer to introduce a sort of quadrature formula. In Equation (
37), the infinite integral in the Laplace pattern is appropriate for numerical calculation by using the Gauss–Laguerre quadrature formula. In fact, introducing the new integration variable
, Equation (
37) can be rewritten in the form
Thus, applying the Gauss–Laguerre quadrature formula, we have
where
is the
j-th zero of the Laguerre polynomial
, and the weight
is given by
Finally, the solution
can be calculated as the approximate analytical expression
The Integer-Order Cases
For the integer-order case
, 2, or 3;
; and there is only the contribution from residues,
, for the solution
. Now, we specialize
in Equation (
30). If
, we have
Substituting them into Equations (
31) and (32), we find that
and
. Thus, from Equation (
30), we obtain the underdamping result of the case
as in Equation (
6). If
then
and
. It follows from Equations (
31) and (32) that
and
. From Equation (
30), the response in Equation (
7) is revealed. If
, then
and
. It follows from Equations (
31) and (32) that
and
. From Equation (
30), the response degenerates to that in Equation (8).
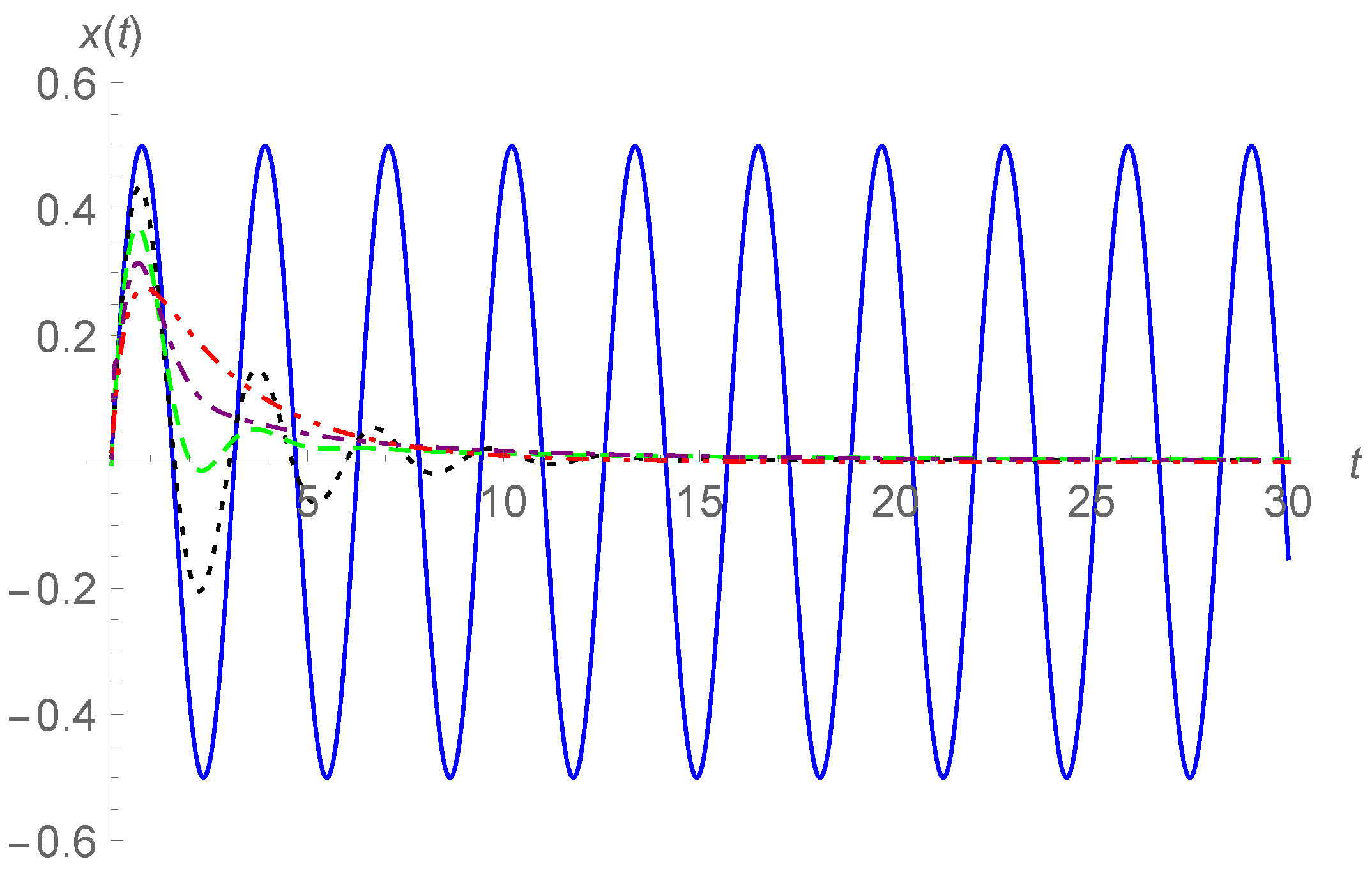
By taking
and
in Equation (
45), the curves of
are plotted in
Figure 5 and
Figure 6 for
and in
Figure 7 and
Figure 8 for
. Here, larger ranges of
t are shown than in
Figure 1,
Figure 2 and
Figure 3. In
Figure 5 and
Figure 6, the responses are the underdamping case for
, while in
Figure 7 and
Figure 8, the responses are the overdamping case for
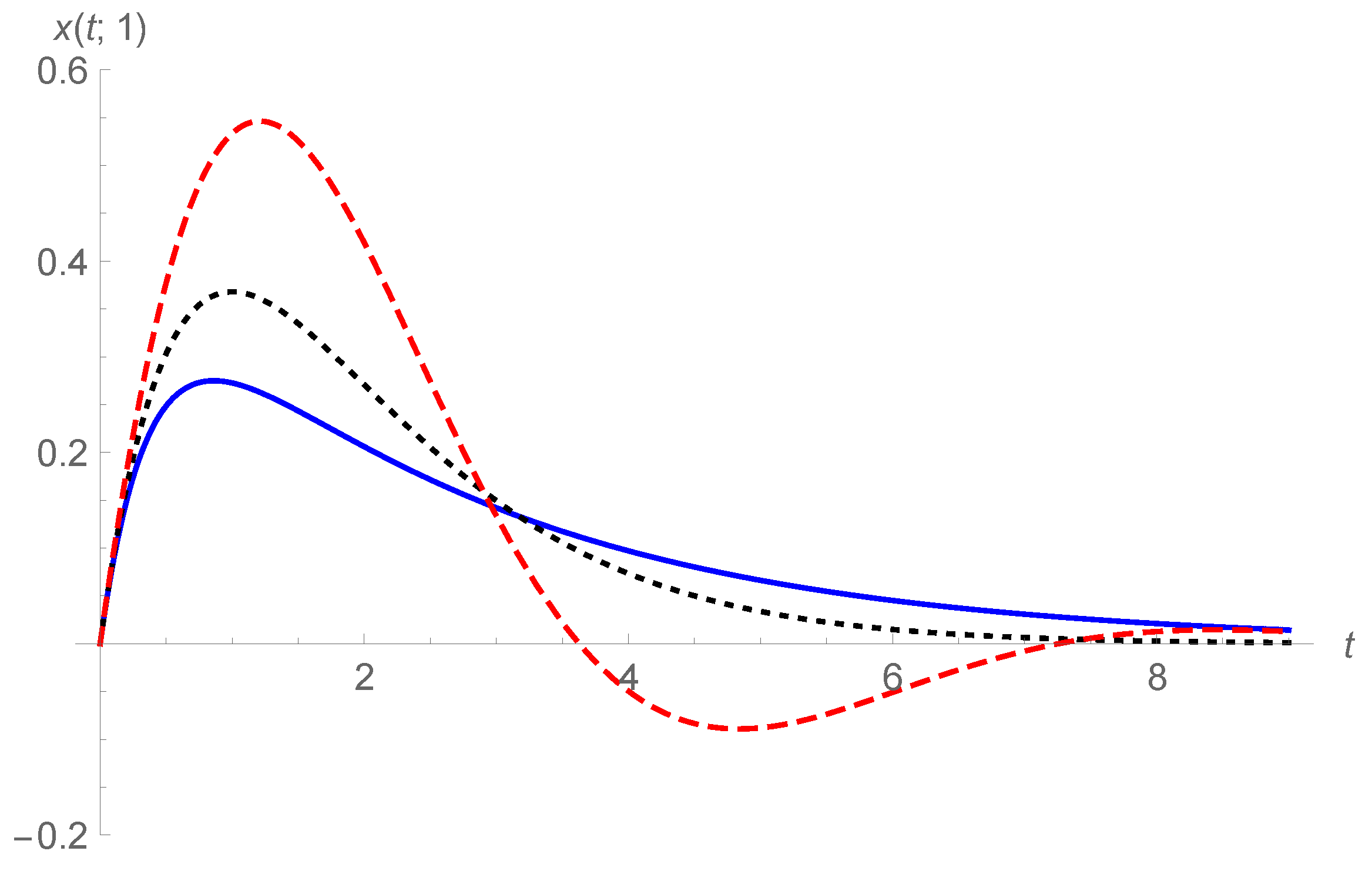
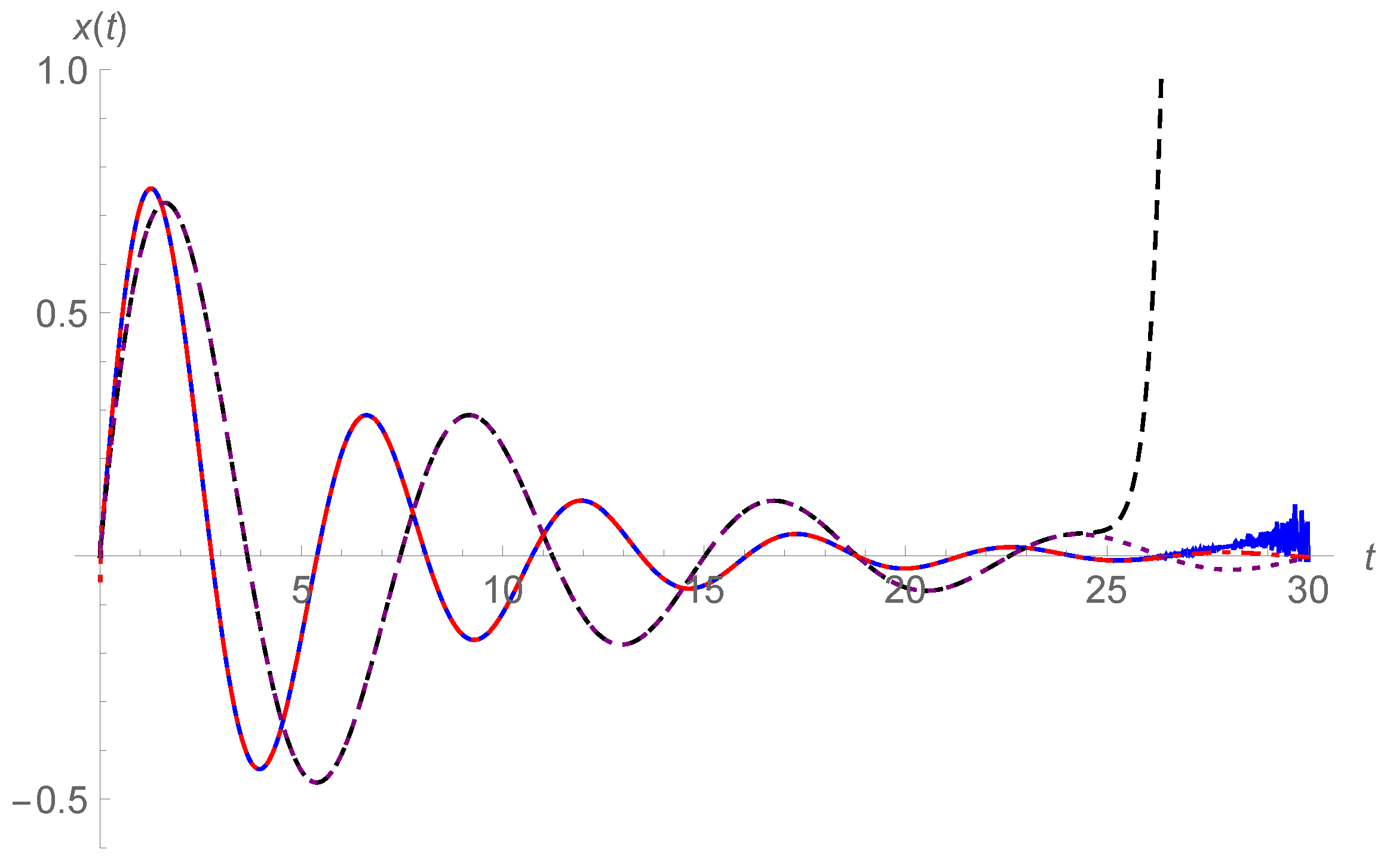
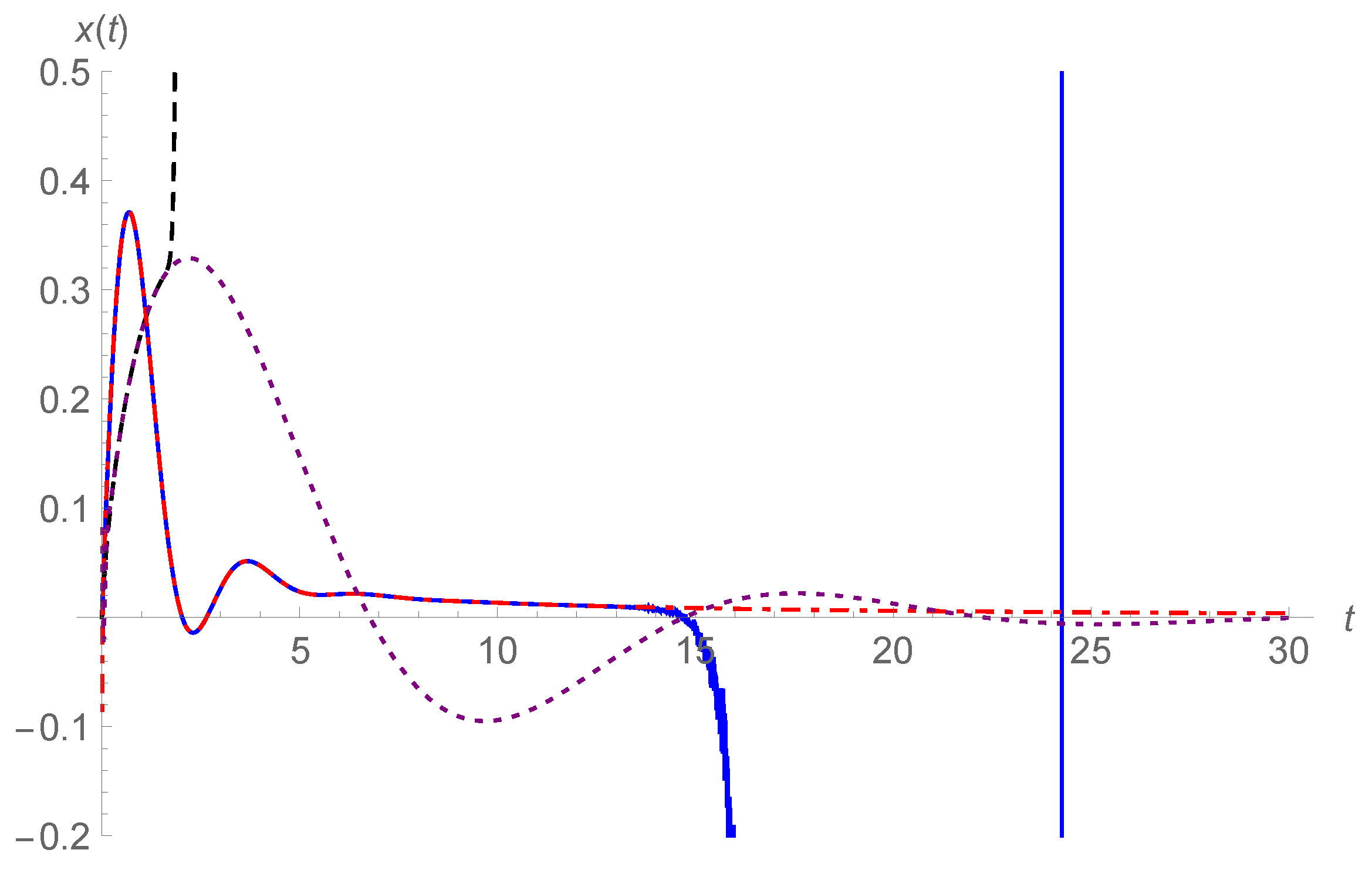
. Finally, in order to compare intuitionally the two analytical forms in Equations (
17) and (
45), we plot their corresponding response curves together. We take
,
and 1.5, and the curves of
are plotted in
Figure 9 for
, while in
Figure 10 for
. The series in Equation (
17) is approximated by the sum of the first 81 terms, while in Equation (
45), we take
. The analytical form in Equation (
45) gives effective results on the whole displayed interval
in
Figure 9 and
Figure 10 by red dotted-dashed lines and purple dotted lines, while the analytical form in Equation (
17) outputs effective curves for
in
Figure 9, and for even smaller intervals in
Figure 10.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}