
Guaranteed Cost Leaderless Consensus Protocol Design for Fractional-Order Uncertain Multi-Agent Systems with State and Input Delays


 ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
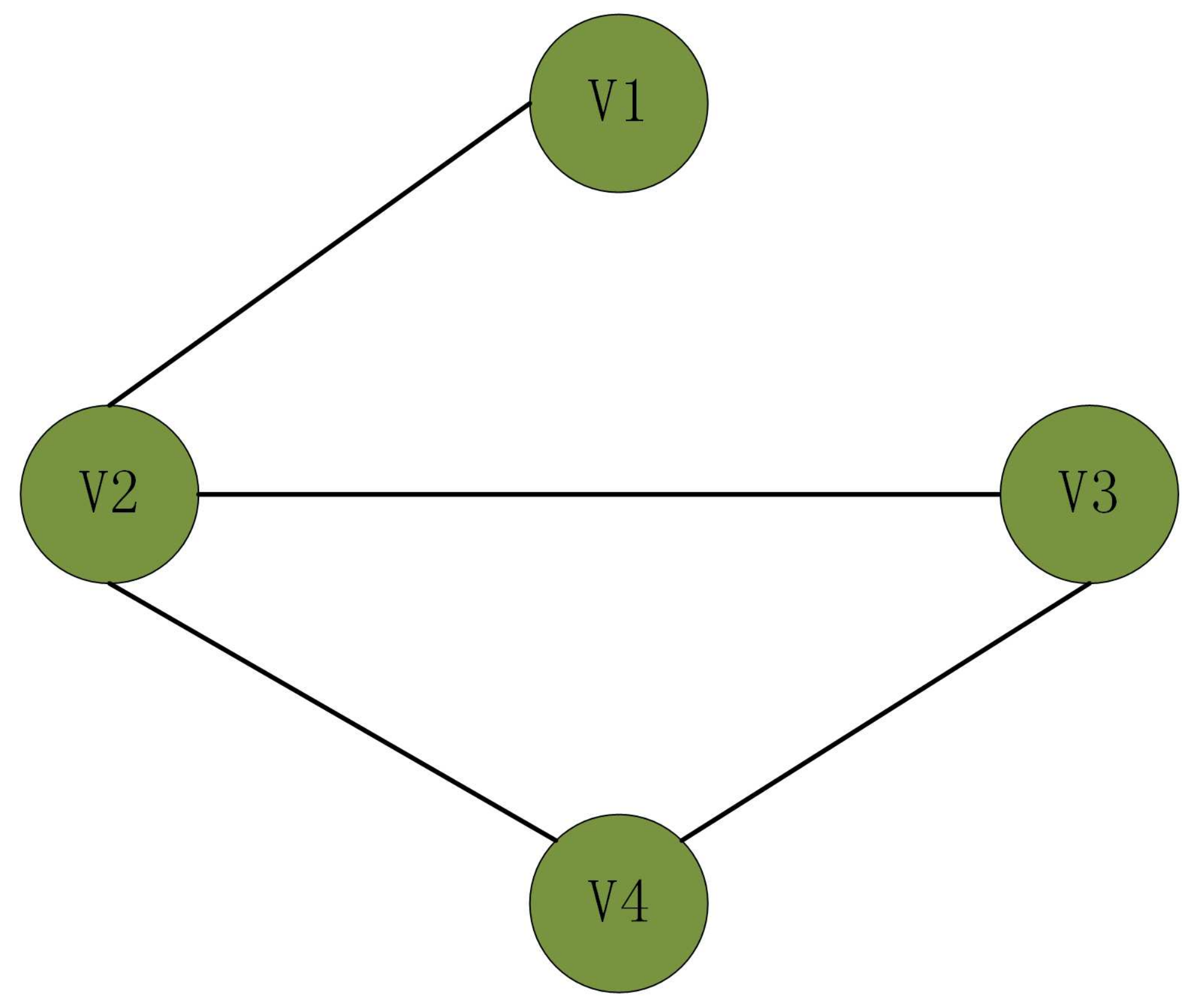
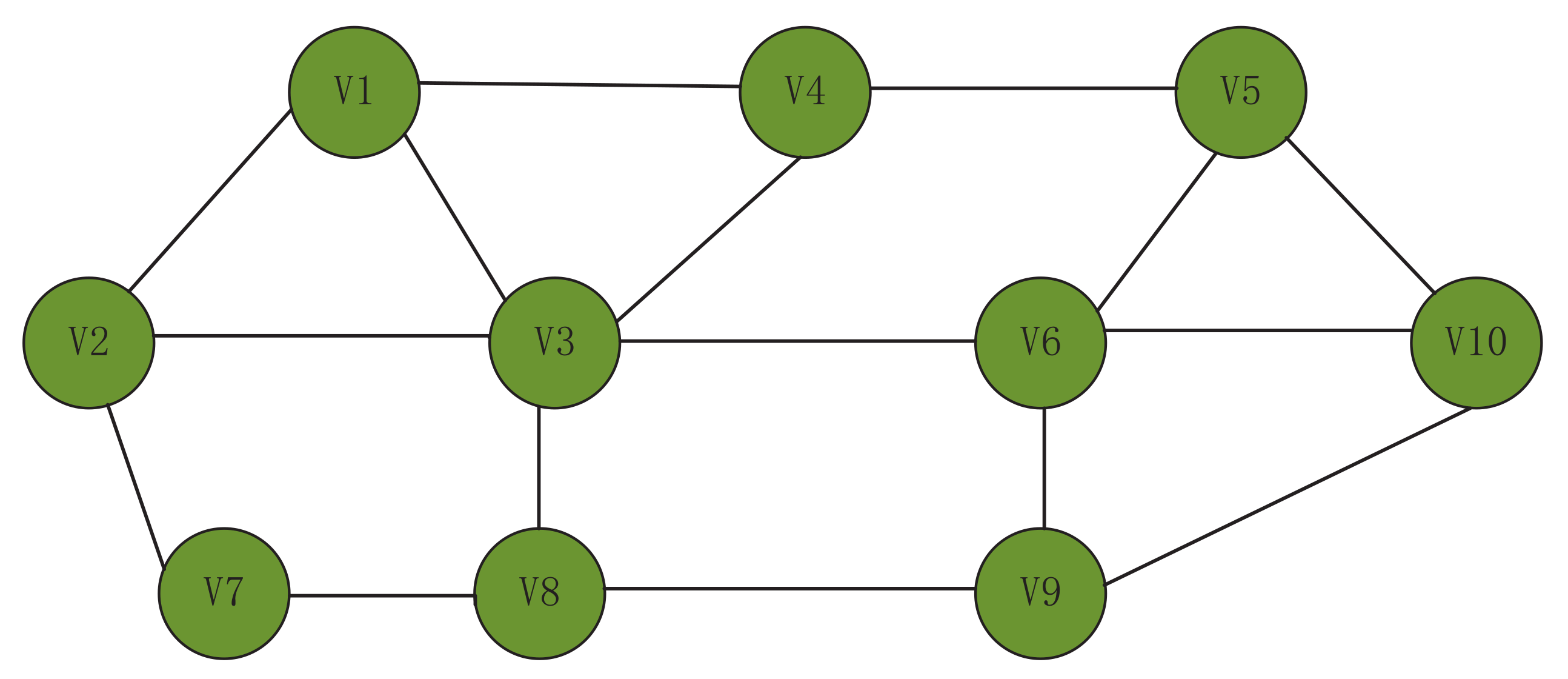
2.1. Graph Theory
2.2. Useful Lemmas
2.3. Problem Statement
3. Main Results
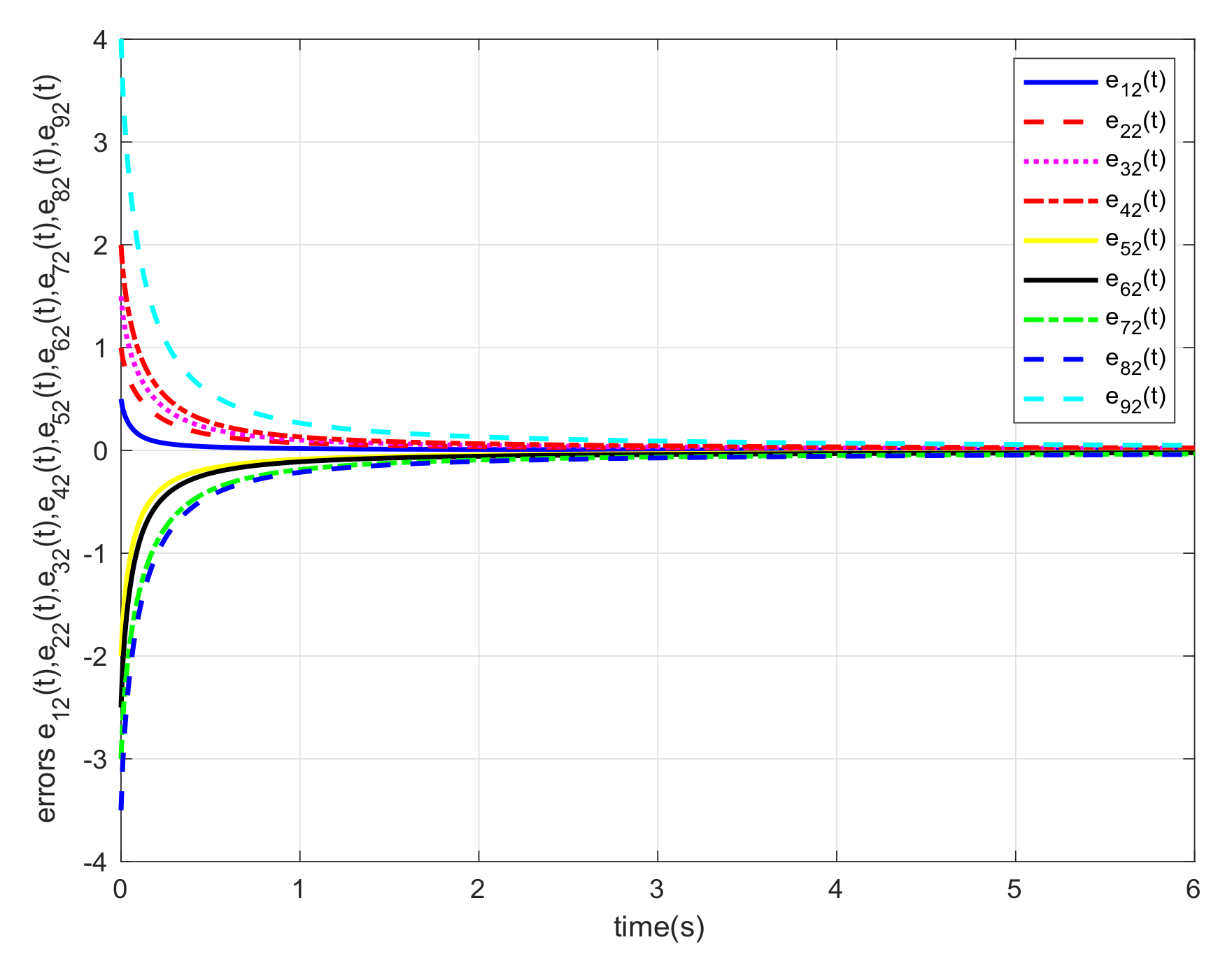
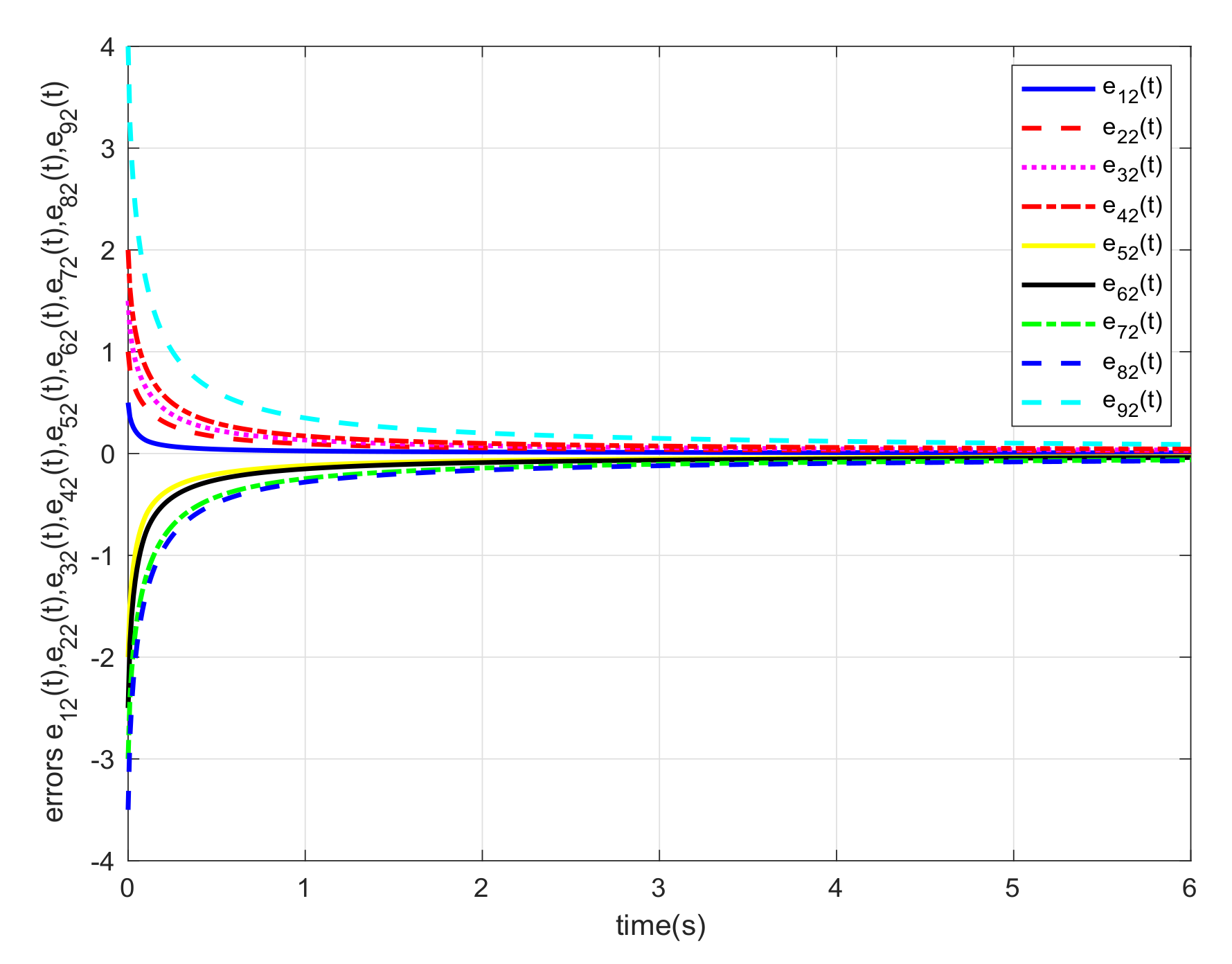
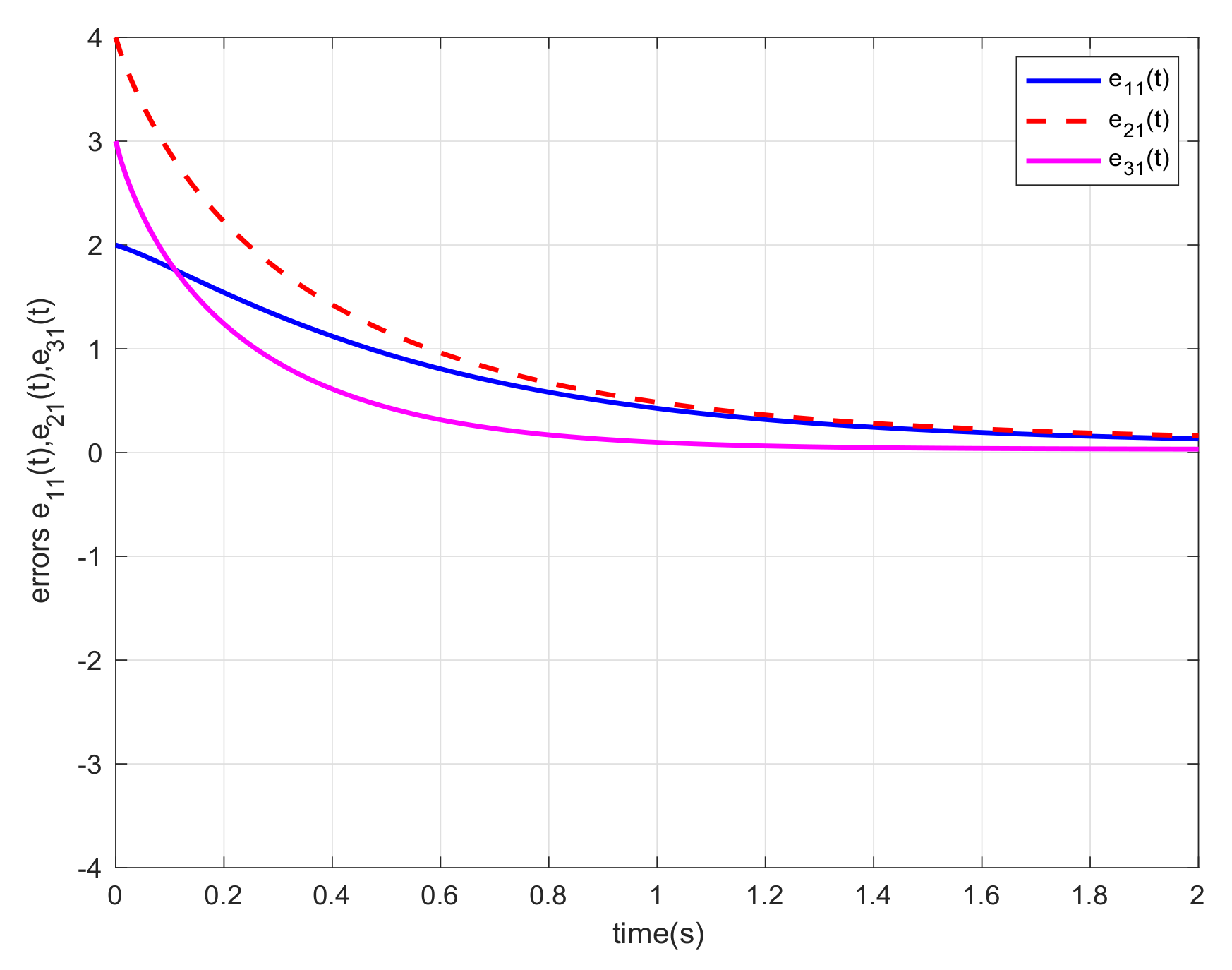
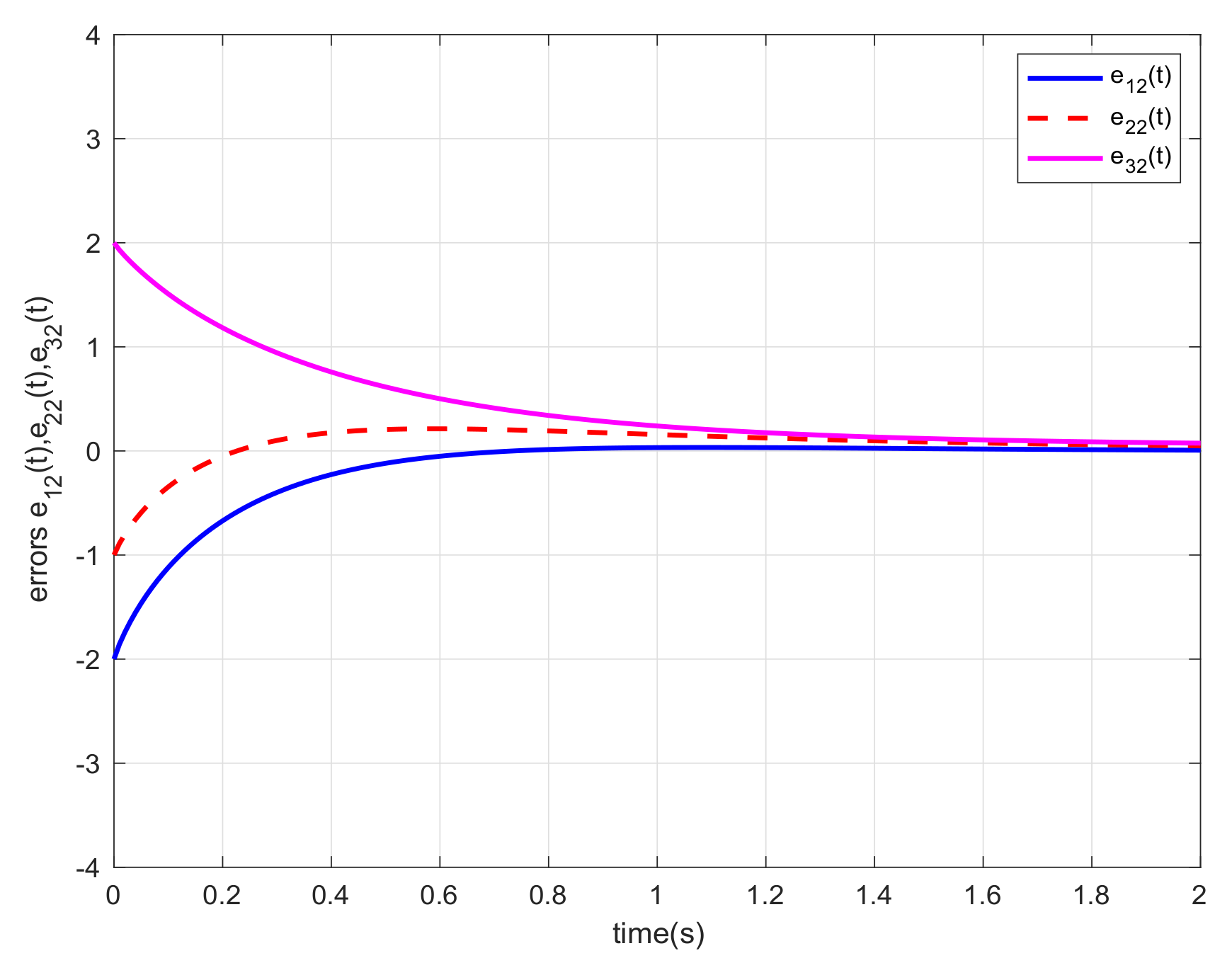
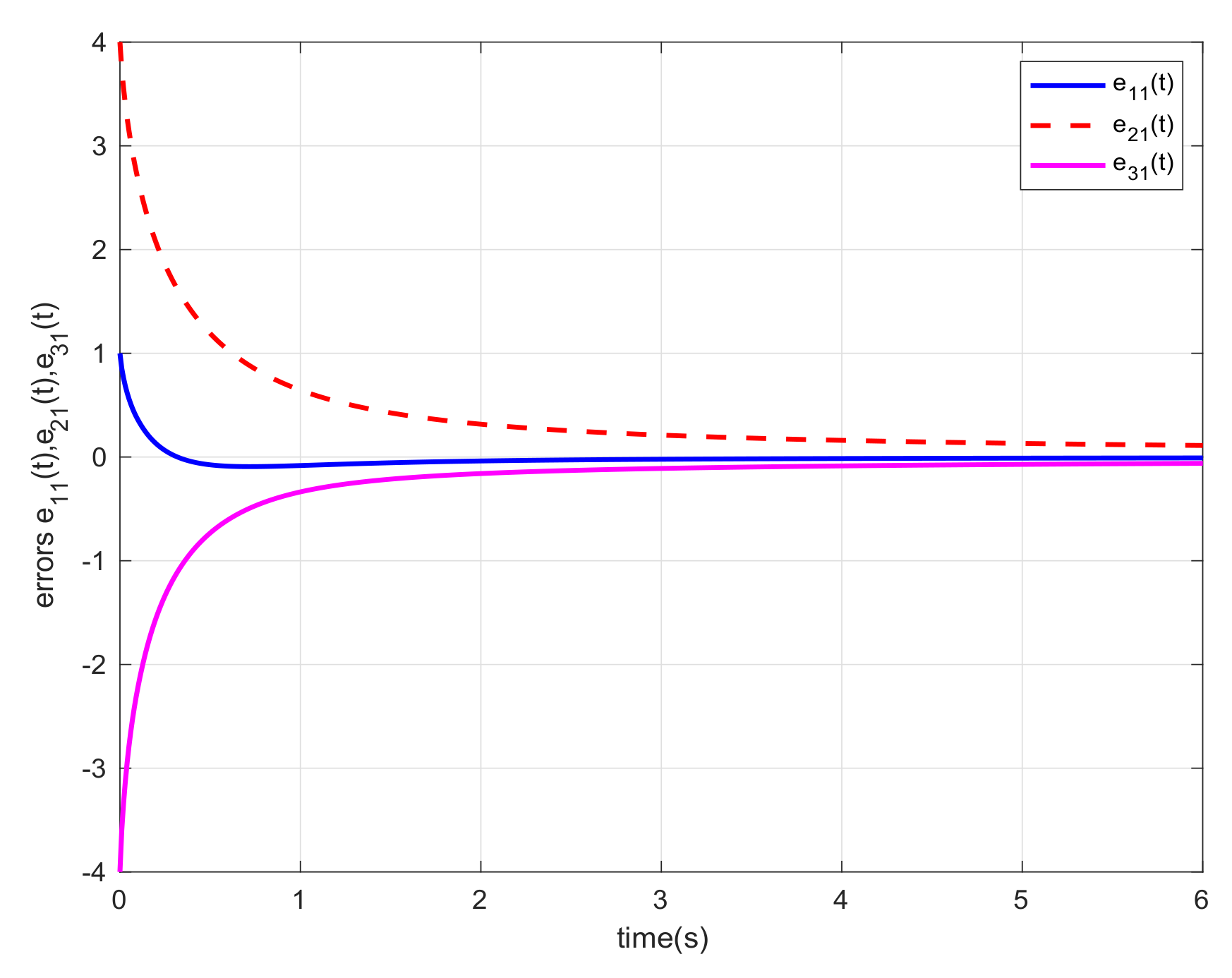
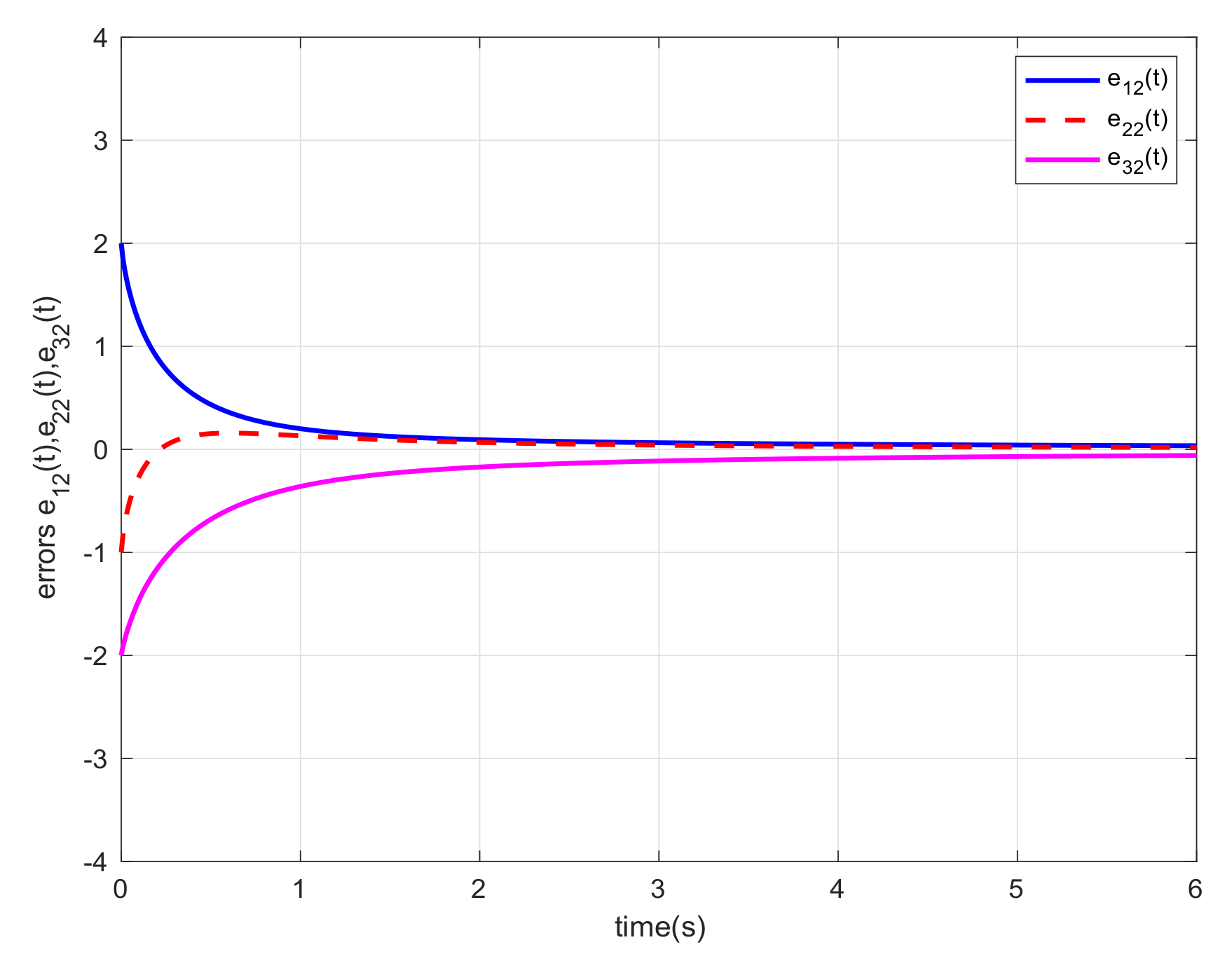
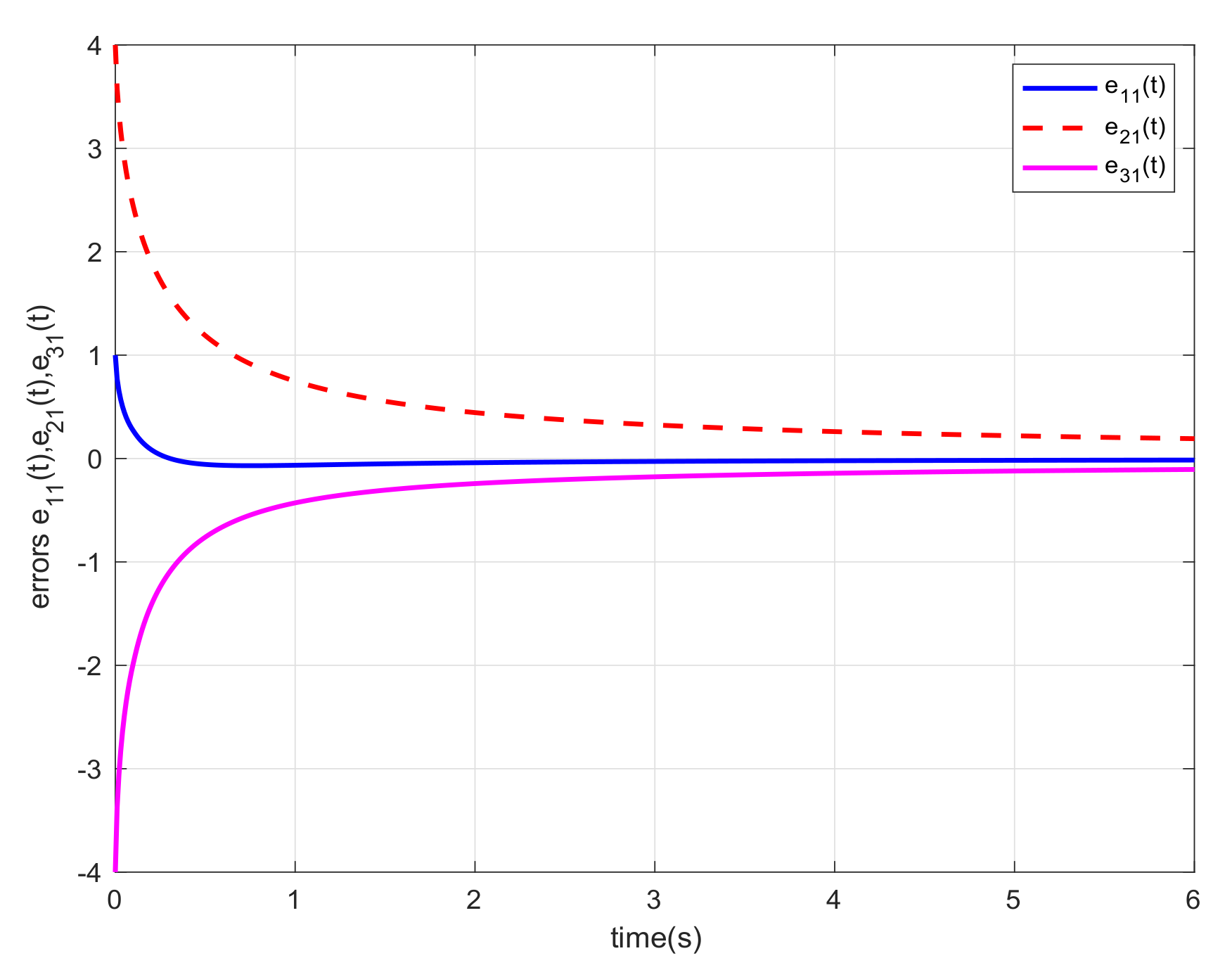
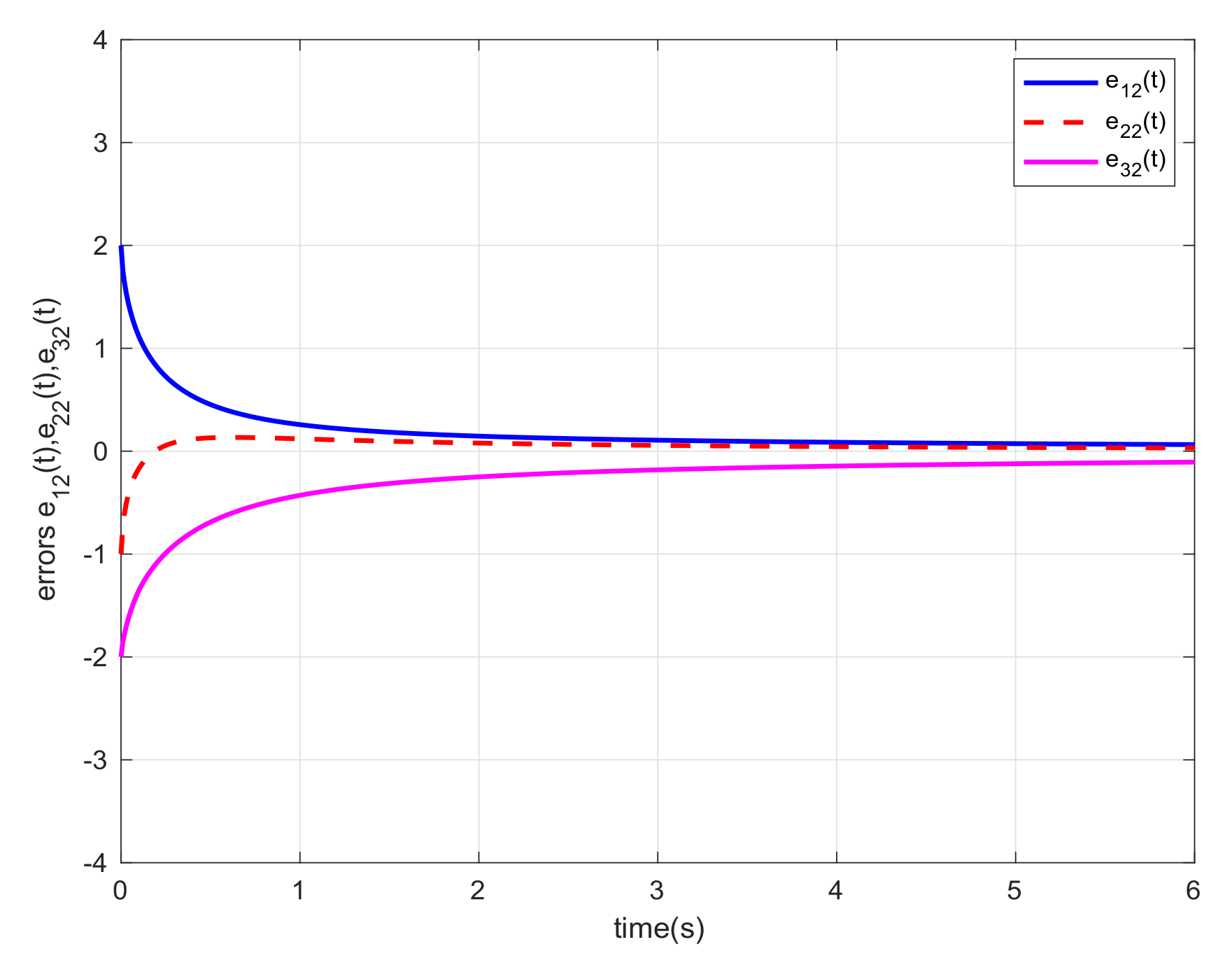
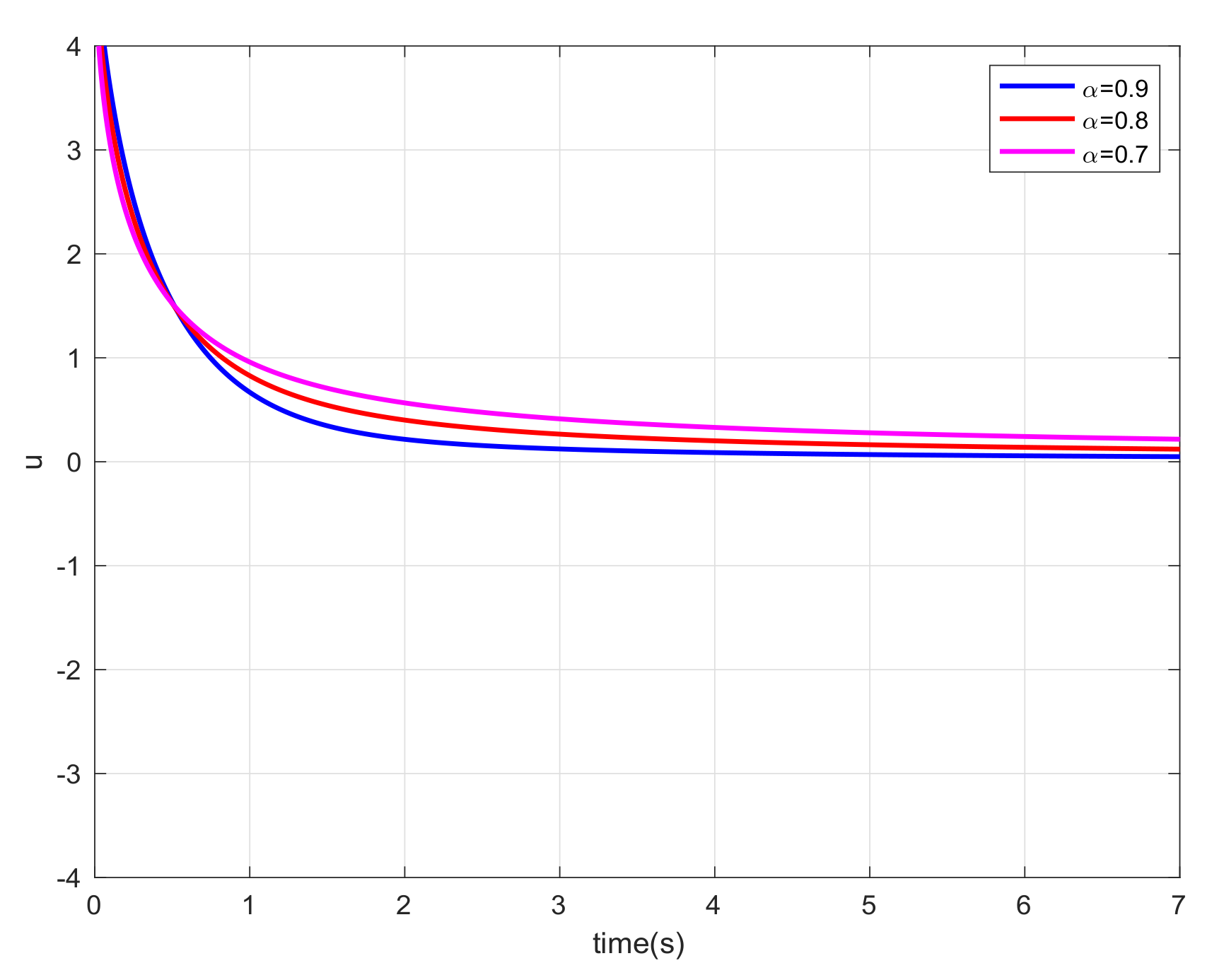
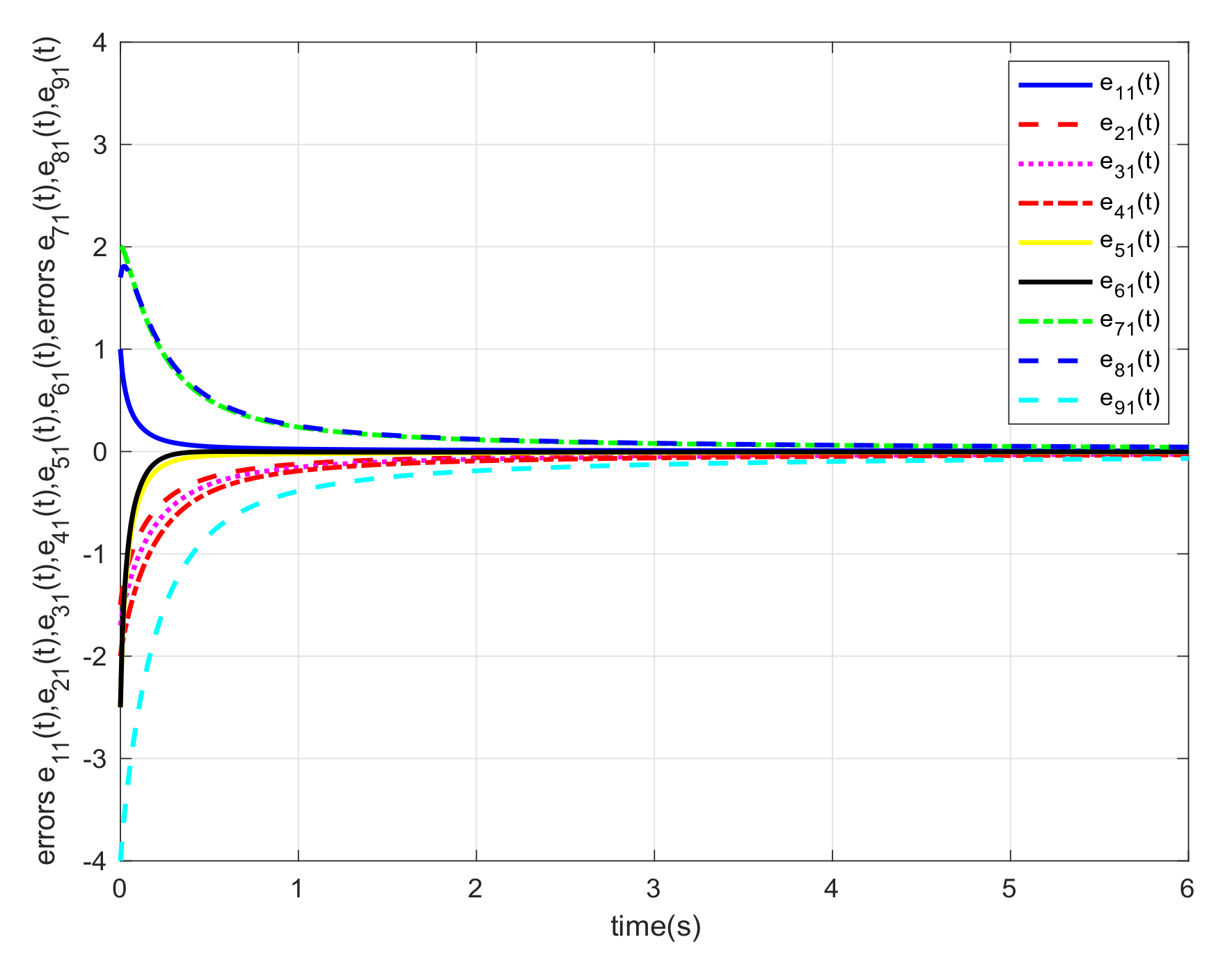
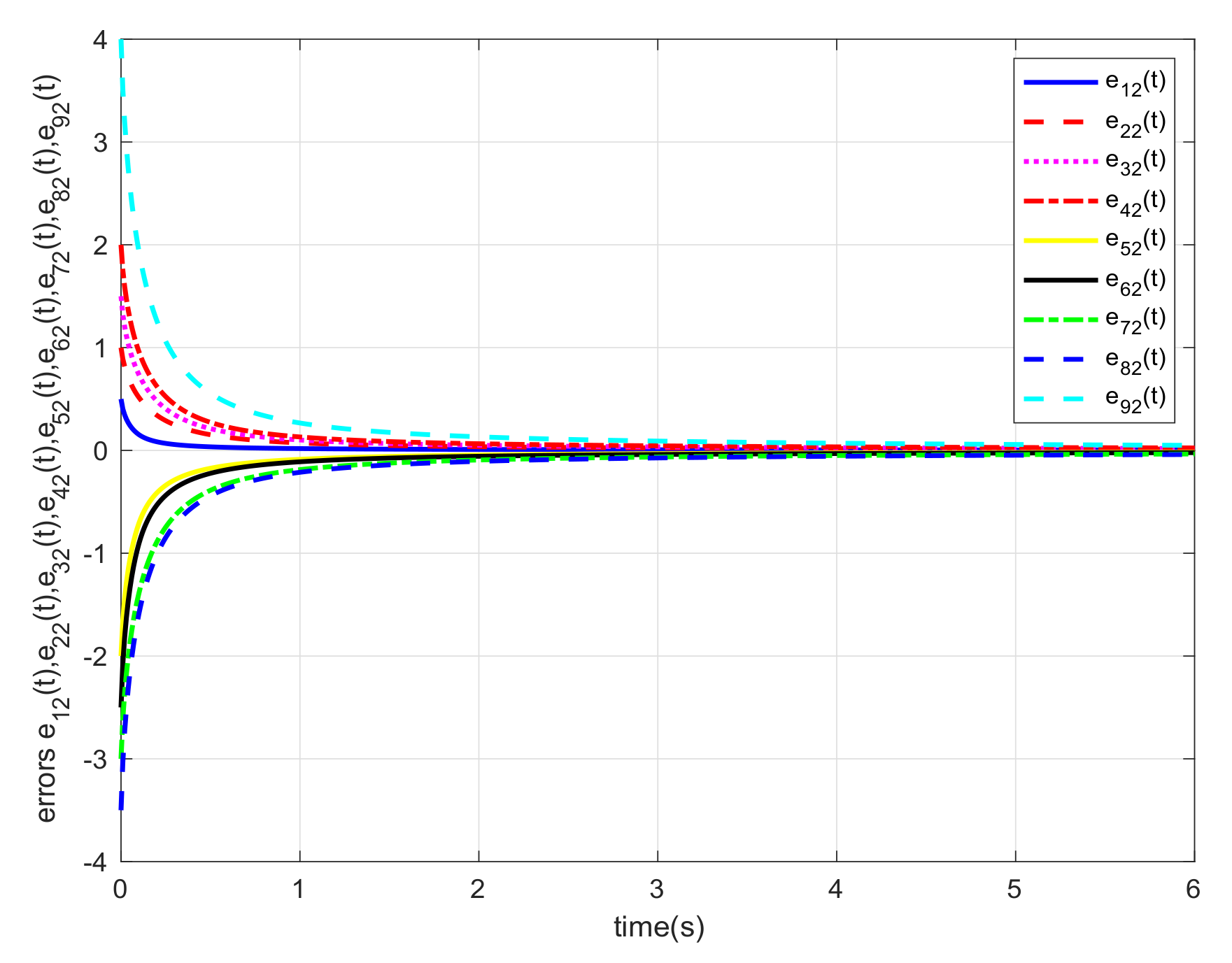
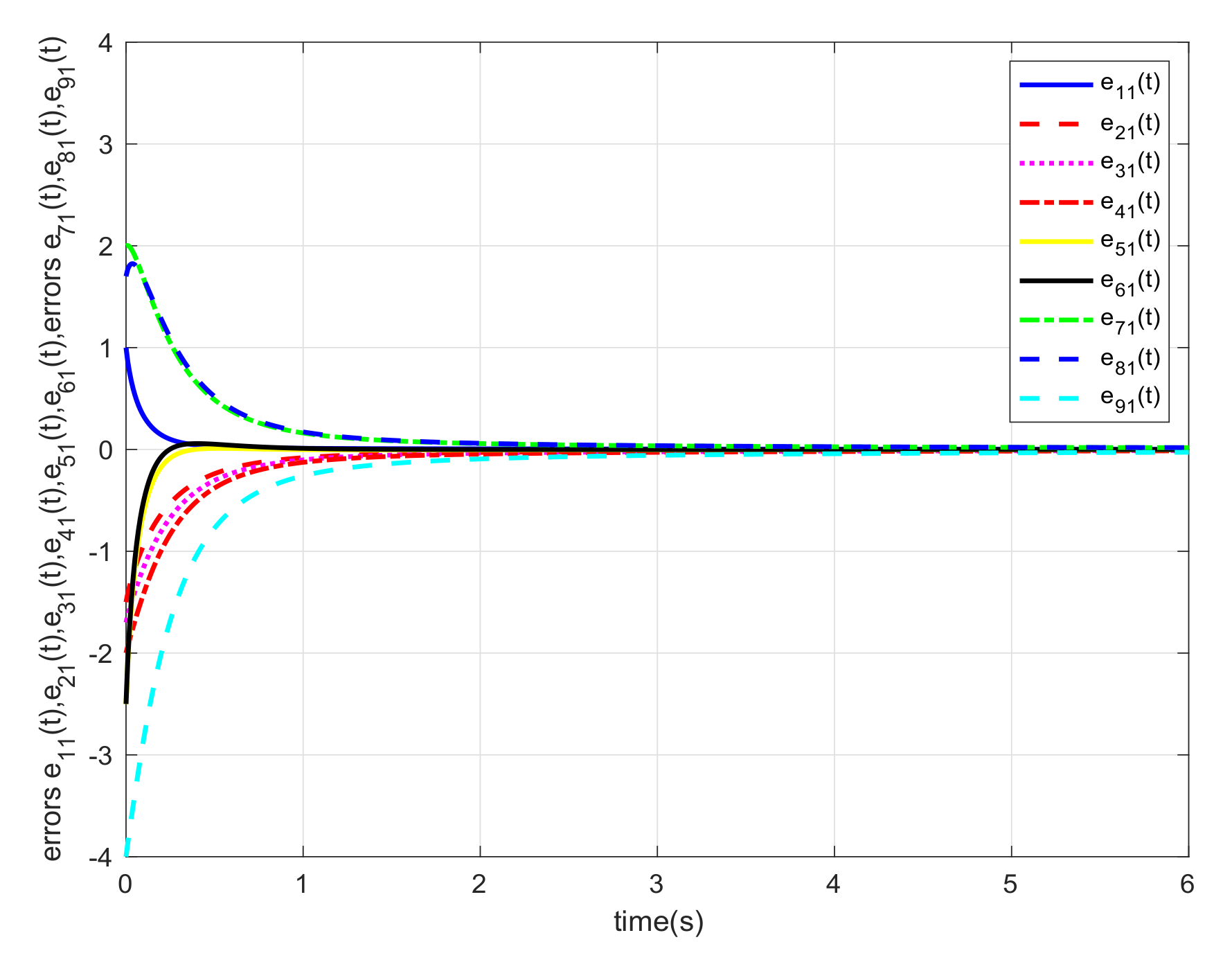
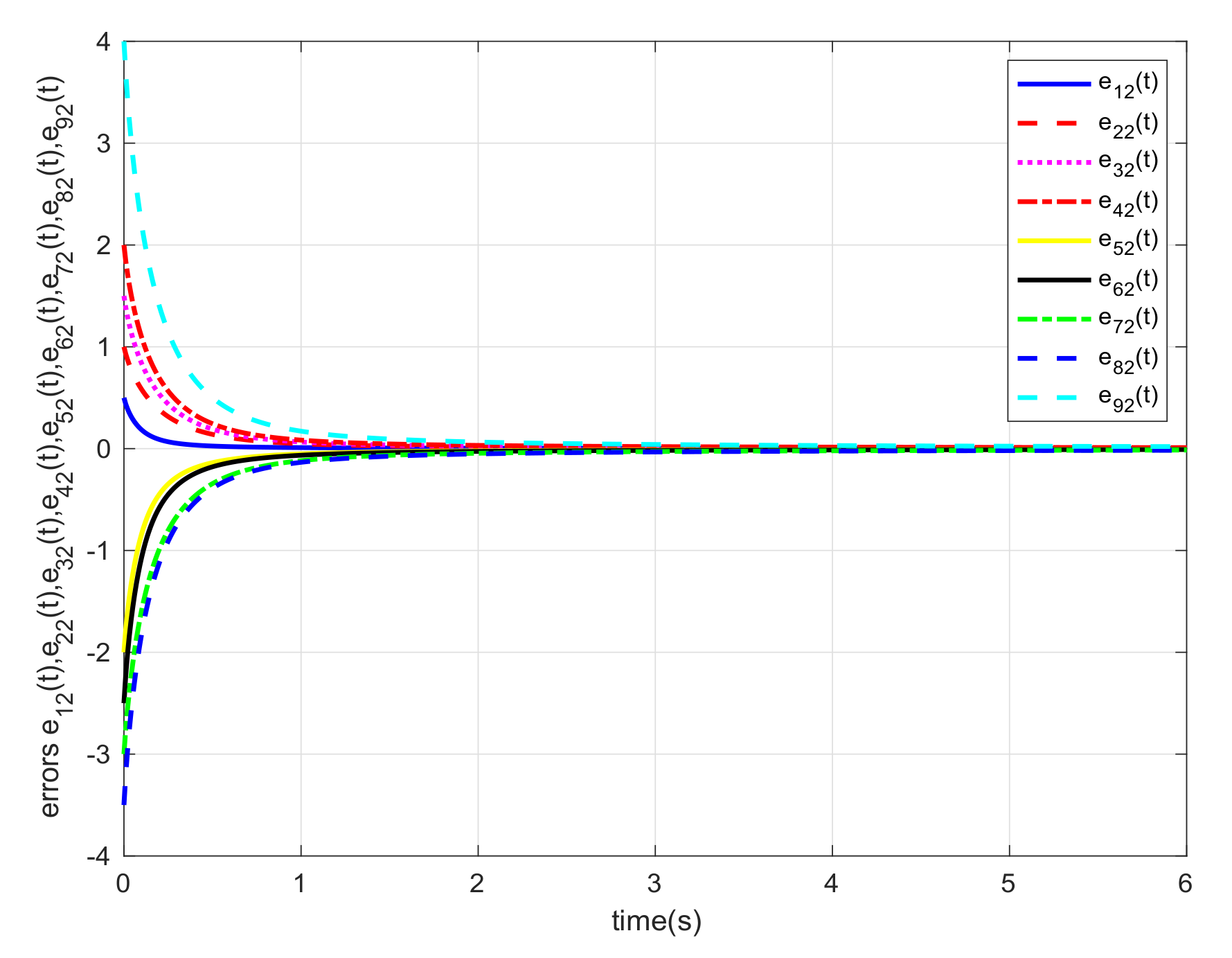
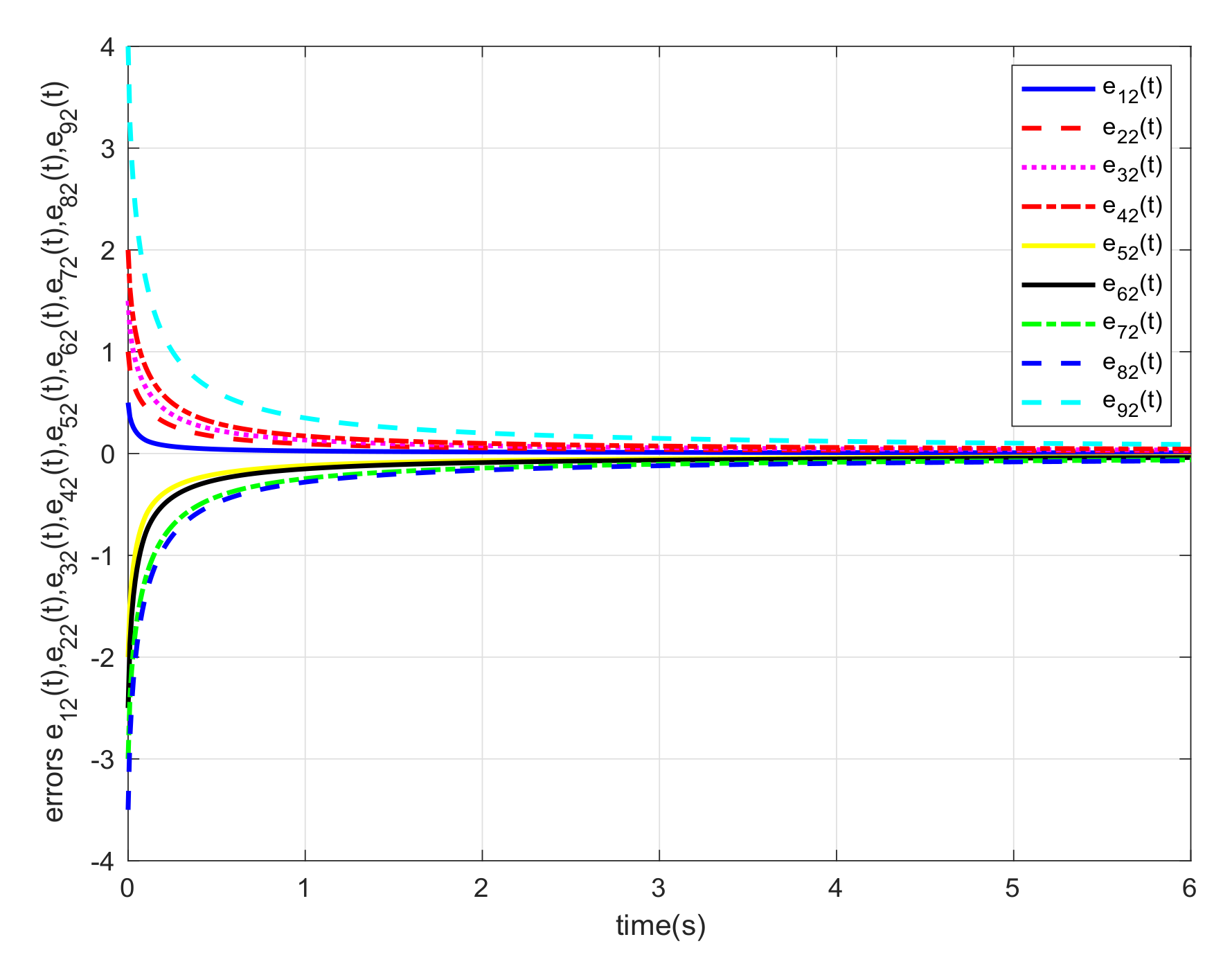
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statementt
Data Availability Statement
Conflicts of Interest
References
- Yu, W.; Chen, G.; Wang, Z.; Yang, W. Distributed consensus filtering in sensor networks. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 39, 1568–1577. [Google Scholar]
- Carpenter, J.R. A preliminary investigation of decentralized control far satellite formations. In Proceedings of the 2000 IEEE Aerospace Conference. Proceedings (Cat. No. 00TH8484), Big Sky, MT, USA, 25 March 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 7, pp. 63–74. [Google Scholar]
- McLain, T.W.; Chandler, P.R.; Rasmussen, S.; Pachter, M. Cooperative control of UAV rendezvous. In Proceedings of the 2001 American Control Conference, (Cat. No. 01CH37148), Arlington, VA, USA, 25–27 June 2001; IEEE: Piscataway, NJ, USA, 2001; Volume 3, pp. 2309–2314. [Google Scholar]
- Hong, Y.; Hu, J.; Gao, L. Tracking control for multi-agent consensus with an active leader and variable topology. Automatica 2006, 42, 1177–1182. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Gao, H.; Zhang, W.; Kurths, J. Leader-following consensus of a class of stochastic delayed multi-agent systems with partial mixed impulses. Automatica 2015, 53, 346–354. [Google Scholar] [CrossRef]
- Kim, H.; Shim, H.; Seo, J.H. Output consensus of heterogeneous uncertain linear multi-agent systems. IEEE Trans. Autom. Control 2010, 56, 200–206. [Google Scholar] [CrossRef]
- Zhu, W.; Jiang, Z.P.; Feng, G. Event-based consensus of multi-agent systems with general linear models. Automatica 2014, 50, 552–558. [Google Scholar] [CrossRef]
- Zheng, Y.; Ma, J.; Wang, L. Consensus of hybrid multi-agent systems. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1359–1365. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.y.; Zhu, X.l.; Cao, K.c. Distributed coordination of fractional order multi-agent systems with communication delays. Fract. Calc. Appl. Anal. 2014, 17, 23–37. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Wang, H.; Wang, W. Distributed coordinated tracking of multiple autonomous underwater vehicles. Nonlinear Dyn. 2014, 78, 1261–1276. [Google Scholar] [CrossRef]
- Chen, L.; Yin, H.; Huang, T.; Yuan, L.; Zheng, S.; Yin, L. Chaos in fractional-order discrete neural networks with application to image encryption. Neural Netw. 2020, 125, 174–184. [Google Scholar] [CrossRef]
- Yang, R.; Liu, S.; Tan, Y.Y.; Zhang, Y.J.; Jiang, W. Consensus analysis of fractional-order nonlinear multi-agent systems with distributed and input delays. Neurocomputing 2019, 329, 46–52. [Google Scholar] [CrossRef]
- Shi, M.; Yu, Y.; Xu, Q. Delay-dependent consensus condition for a class of fractional-order linear multi-agent systems with input time-delay. Int. J. Syst. Sci. 2019, 50, 669–678. [Google Scholar] [CrossRef]
- Ren, G.; Yu, Y.; Xu, C.; Hai, X. Consensus of fractional multi-agent systems by distributed event-triggered strategy. Nonlinear Dyn. 2019, 95, 541–555. [Google Scholar] [CrossRef]
- Hu, T.; He, Z.; Zhang, X.; Zhong, S. Leader-following consensus of fractional-order multi-agent systems based on event-triggered control. Nonlinear Dyn. 2020, 99, 2219–2232. [Google Scholar] [CrossRef]
- Gong, P.; Wang, K. Output feedback consensus control for fractional-order nonlinear multi-agent systems with directed topologies. J. Frankl. Inst. 2020, 357, 1473–1493. [Google Scholar] [CrossRef]
- Gong, P.; Wang, K.; Lan, W. Fully distributed robust consensus control of multi-agent systems with heterogeneous unknown fractional-order dynamics. Int. J. Syst. Sci. 2019, 50, 1902–1919. [Google Scholar] [CrossRef]
- Hu, W.; Wen, G.; Rahmani, A.; Bai, J.; Yu, Y. Leader-following consensus of heterogenous fractional-order multi-agent systems under input delays. Asian J. Control 2020, 22, 2217–2228. [Google Scholar] [CrossRef]
- Ren, G.; Yu, Y. Consensus of fractional multi-agent systems using distributed adaptive protocols. Asian J. Control 2017, 19, 2076–2084. [Google Scholar] [CrossRef]
- Wyrwas, M.; Mozyrska, D.; Girejko, E. Fractional discrete-time consensus models for single-and double-summator dynamics. Int. J. Syst. Sci. 2018, 49, 1212–1225. [Google Scholar] [CrossRef]
- Yaghoubi, Z.; Talebi, H.A. Consensus tracking for nonlinear fractional-order multi-agent systems using adaptive sliding mode controller. Mechatron. Syst. Control (Former Control Intell. Syst.) 2019, 47, 194–200. [Google Scholar] [CrossRef]
- Wei, Z.; Bo, C. Leader-following consensus of fractional-order multi-agent systems with nonlinear models. Appl. Math. Mech. 2015, 36, 555–562. [Google Scholar]
- Luo, Y.; Xiao, X.; Cao, J.; Li, A. Event-triggered guaranteed cost consensus for uncertain nonlinear multi-agent systems with time delay. Neurocomputing 2020, 394, 13–26. [Google Scholar] [CrossRef]
- Wang, Z.; Fan, Z.; Liu, G. Guaranteed performance consensus problems for nonlinear multi-agent systems with directed topologies. Int. J. Control 2019, 92, 2952–2962. [Google Scholar] [CrossRef]
- Wang, Z.; Xi, J.; Yao, Z.; Liu, G. Guaranteed cost consensus for multi-agent systems with fixed topologies. Asian J. Control 2015, 17, 729–735. [Google Scholar] [CrossRef]
- Wang, Z.; Xi, J.; Yu, Z.; Liu, G. Guaranteed cost consensus for multi-agent systems with time delays. J. Frankl. Inst. 2015, 352, 3612–3627. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Sun, C.; Yu, Y. Fixed-time consensus of multi-agent systems with input delay and uncertain disturbances via event-triggered control. Inf. Sci. 2019, 480, 261–272. [Google Scholar] [CrossRef]
- Xie, L. Output feedback H∞ control of systems with parameter uncertainty. Int. J. Control 1996, 63, 741–750. [Google Scholar] [CrossRef]
- Liang, S.; Wu, R.; Chen, L. Comparison principles and stability of nonlinear fractional-order cellular neural networks with multiple time delays. Neurocomputing 2015, 168, 618–625. [Google Scholar] [CrossRef]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Chen, L.; Li, T.; Wu, R.; Lopes, A.M.; Machado, J.T.; Wu, K. Output-feedback guaranteed-cost control of fractional-order uncertain linear delayed systems. Comput. Appl. Math. 2020, 39, 210. [Google Scholar] [CrossRef]
- Shen, B.; Wang, Z.; Tan, H. Guaranteed cost control for uncertain nonlinear systems with mixed time-delays: The discrete-time case. Eur. J. Control 2018, 40, 62–67. [Google Scholar] [CrossRef]
- Xi, J.; Fan, Z.; Liu, H.; Zheng, T. Guaranteed-cost consensus for multiagent networks with Lipschitz nonlinear dynamics and switching topologies. Int. J. Robust Nonlinear Control 2018, 28, 2841–2852. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Chen, J. Razumikhin-type stability theorems for functional fractional-order differential systems and applications. Appl. Math. Comput. 2015, 254, 63–69. [Google Scholar] [CrossRef]
- Chen, Y.; Wen, G.; Peng, Z.; Huang, T.; Yu, Y. Necessary and sufficient conditions for group consensus of fractional multiagent systems under fixed and switching topologies via pinning control. IEEE Trans. Cybern. 2019, 51, 28–39. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.; Chen, B.; Yang, J. Consensus of fractional-order multi-agent systems with input time delay. Fract. Calc. Appl. Anal. 2017, 20, 52. [Google Scholar] [CrossRef]
- Wang, X.; Li, X.; Huang, N.; O’Regan, D. Asymptotical consensus of fractional-order multi-agent systems with current and delay states. Appl. Math. Mech. 2019, 40, 1677–1694. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Xia, Q.; Chai, Y.; Chen, L.; Lopes, A.M.; Chen, Y. Guaranteed Cost Leaderless Consensus Protocol Design for Fractional-Order Uncertain Multi-Agent Systems with State and Input Delays. Fractal Fract. 2021, 5, 141. https://doi.org/10.3390/fractalfract5040141
Tian Y, Xia Q, Chai Y, Chen L, Lopes AM, Chen Y. Guaranteed Cost Leaderless Consensus Protocol Design for Fractional-Order Uncertain Multi-Agent Systems with State and Input Delays. Fractal and Fractional. 2021; 5(4):141. https://doi.org/10.3390/fractalfract5040141
Chicago/Turabian StyleTian, Yingming, Qin Xia, Yi Chai, Liping Chen, António M. Lopes, and YangQuan Chen. 2021. "Guaranteed Cost Leaderless Consensus Protocol Design for Fractional-Order Uncertain Multi-Agent Systems with State and Input Delays" Fractal and Fractional 5, no. 4: 141. https://doi.org/10.3390/fractalfract5040141
APA StyleTian, Y., Xia, Q., Chai, Y., Chen, L., Lopes, A. M., & Chen, Y. (2021). Guaranteed Cost Leaderless Consensus Protocol Design for Fractional-Order Uncertain Multi-Agent Systems with State and Input Delays. Fractal and Fractional, 5(4), 141. https://doi.org/10.3390/fractalfract5040141