
Demand Response Optimal Dispatch and Control of TCL and PEV Agents with Renewable Energies



Abstract
:1. Introduction
| Acronyms | Full Name |
| DR | Demand response |
| TCL | Thermostatically controlled load |
| TCL | Plug-in electric vehicle |
| SAA | Sample average approximation |
| TOU | Time-of-use |
| SoC | State-of-charge |
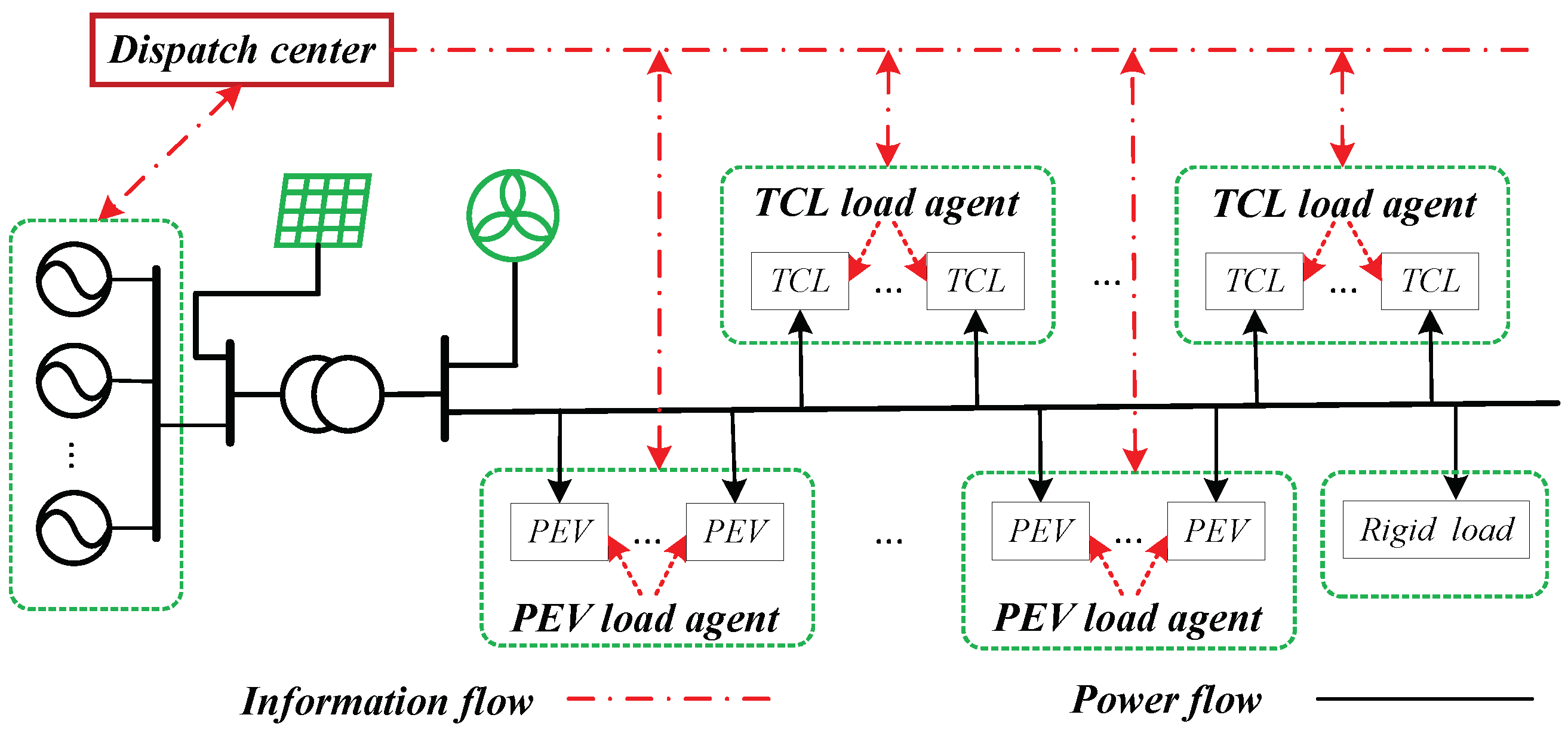
2. Problem Formulation
3. Chance-Constrained Look-Ahead Optimization
4. Demand Response Control of Load Agents
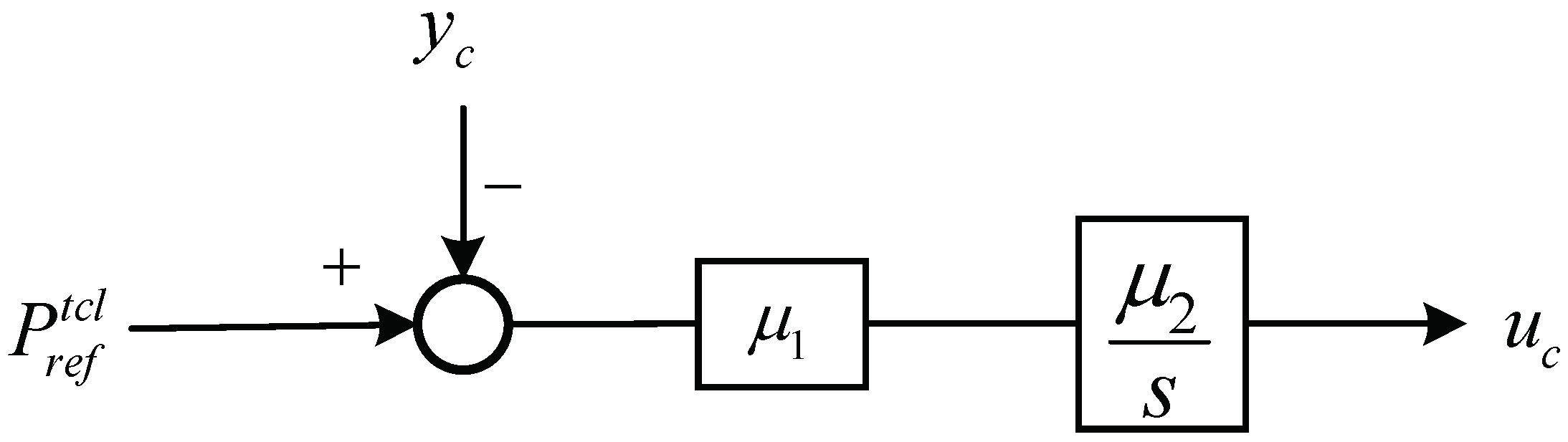
4.1. Aggregated TCL Model and Feedback Control
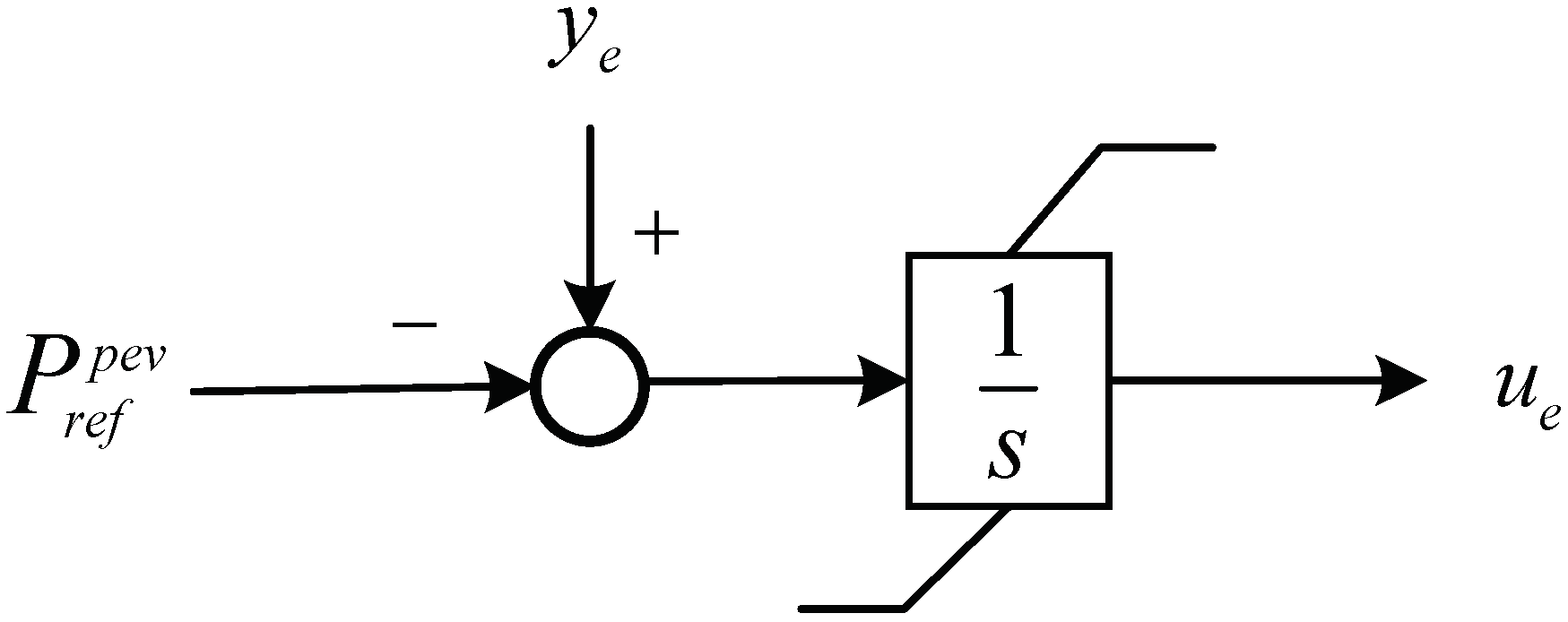
4.2. Aggregated PEV Model and Feedback Control
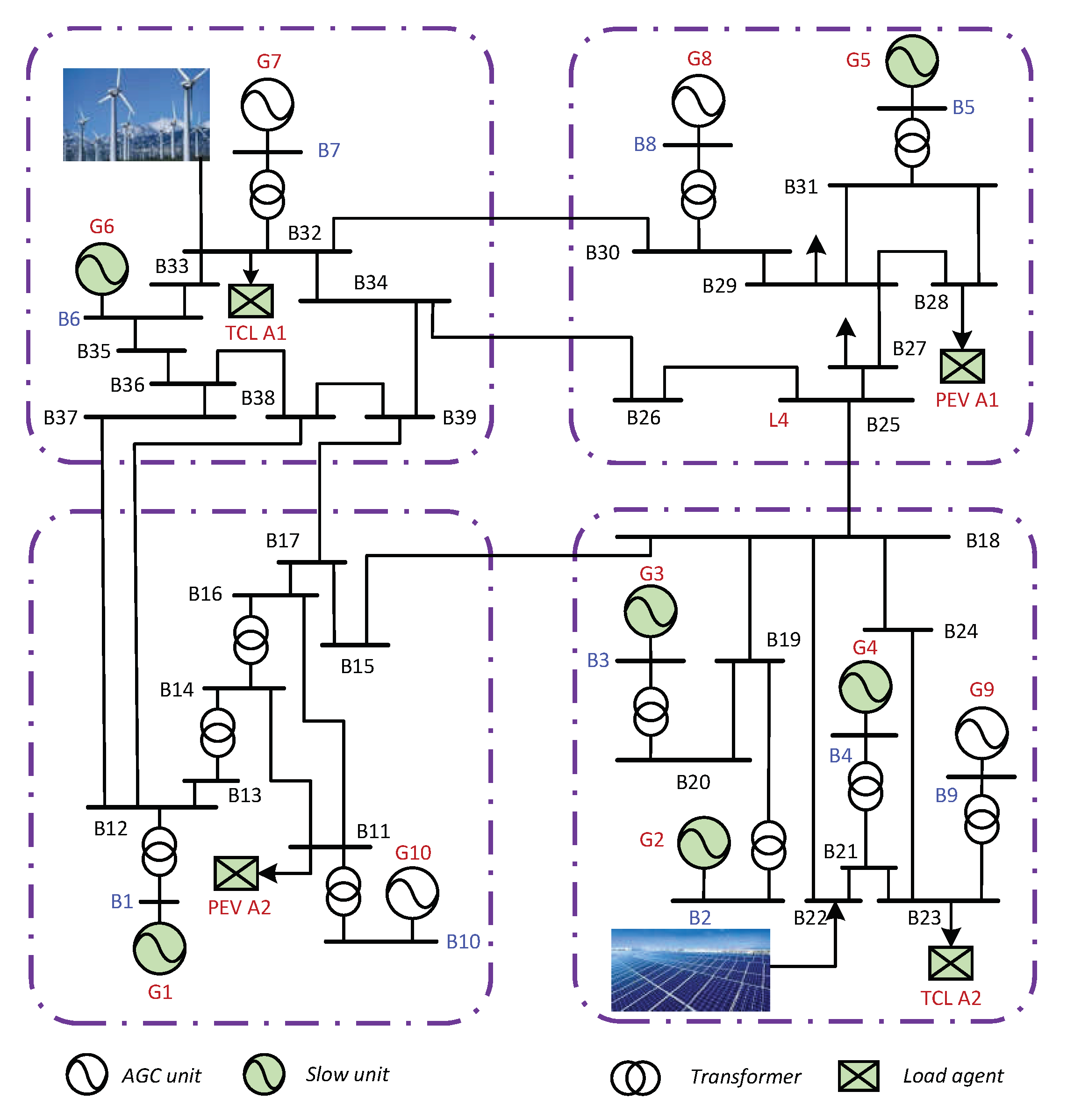
5. Case Study
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, J.; Cao, J.; Yong, T. Multi-level dispatch control architecture for power systems with demand-side resources. IET Gener. Transm. Distrib. 2015, 9, 2799–2810. [Google Scholar] [CrossRef]
- Bukhsh, W.; Zhang, C.; Pinson, P. An integrated multiperiod OPF model with demand response and renewable generation uncertainty. IEEE Trans. Smart Grid 2016, 7, 1495–1503. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Cao, J.; Guerrero, J.M.; Yong, T.; Yu, J. Improving frequency stability based on distributed control of multiple load aggregators. IEEE Trans. Smart Grid 2017, 8, 1553–1567. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Wen, G.; Cao, J.; Yu, X. Model predictive power dispatch and control with price-elastic load in energy internet. IEEE Trans. Ind. Inform. 2019, 15, 1775–1787. [Google Scholar] [CrossRef]
- Chen, Z. Wind power in modern power systems. J. Mod. Power Syst. Clean Energy 2013, 1, 2–13. [Google Scholar] [CrossRef] [Green Version]
- Yin, J.; Zhao, D. Economic dispatch coordinated with information granule chance constraint goal programming under the manifold uncertainties. IET Renew. Power Gener. 2019, 13, 1329–1337. [Google Scholar] [CrossRef]
- Gu, Y.; Xie, L. Stochastic look-ahead economic dispatch with variable generation resources. IEEE Trans. Power Syst. 2017, 32, 17–29. [Google Scholar] [CrossRef]
- Javadi, M.; Amraee, T.; Capitanescu, F. Look ahead dynamic security-constrained economic dispatch considering frequency stability and smart loads. Int. J. Electr. Power Energy Syst. 2019, 108, 2019. [Google Scholar] [CrossRef]
- Wu, W.; Chen, J.; Zhang, B.; Sun, H. A robust wind power optimization method for look-ahead power dispatch. IEEE Trans. Sustain. Energy 2014, 5, 507–515. [Google Scholar] [CrossRef]
- Xiong, P.; Jirutitijaroen, P.; Singh, C. A distributionally robust optimization model for unit commitment considering uncertain wind power generation. IEEE Trans. Power Syst. 2017, 32, 39–49. [Google Scholar] [CrossRef]
- Ebrahimi, M.R.; Amjady, N. Adaptive robust optimization framework for day-ahead microgrid scheduling. Int. J. Electr. Power Energy Syst. 2019, 107, 2019. [Google Scholar] [CrossRef]
- Gangammanavar, H.; Sen, S.; Zavala, V.M. Stochastic optimization of sub-hourly economic dispatch with wind energy. IEEE Trans. Power Syst. 2016, 31, 949–959. [Google Scholar] [CrossRef]
- Wang, S.; Gangammanavar, H.; Eksioglu, S.D.; Mason, S.J. Stochastic optimization for energy management in power systems with multiple microgrids. IEEE Trans. Smart Grid 2019, 10, 1068–1079. [Google Scholar] [CrossRef]
- Yao, L.; Wang, X.; Li, Y.; Duan, C.; Wu, X. Distributionally robust chance-constrained AC-OPF for integrating wind energy through multi-terminal VSC-HVDC. IEEE Trans. Sustain. Energy 2020, 11, 1414–1426. [Google Scholar] [CrossRef]
- Shahidehpour, M.; Qi, F.; Wen, F.; Shao, C.; Li, Z. A chance-constrained decentralized operation of multi-area integrated electricity-natural gas systems with variable wind and solar energy. IEEE Trans. Sustain. Energy 2020, 11, 2230–2240. [Google Scholar]
- Hu, J.; Cao, J.; Yong, T.; Guerrero, J.M.; Chen, M.Z.Q.; Li, Y. Demand response load following of source and load systems. IEEE Trans. Control. Syst. Technol. 2017, 25, 1586–1598. [Google Scholar] [CrossRef] [Green Version]
- Bhattarai, B.P.; Levesque, M.; Bakjensen, B.; Pillai, J.R.; Maier, M.; Tipper, D.; Myers, K.S. Design and cosimulation of hierarchical architecture for demand response control and coordination. IEEE Trans. Ind. Inform. 2017, 13, 1806–1816. [Google Scholar] [CrossRef]
- Bruninx, K.; Dvorkin, Y.; Delarue, E.; Dhaeseleer, W.; Kirschen, D.S. Valuing demand response controllability via chance constrained programming. IEEE Trans. Sustain. Energy 2018, 9, 178–187. [Google Scholar] [CrossRef] [Green Version]
- Kong, X.; Yong, C.; Wang, C.; Chen, Y.; Yu, L. Optimal strategy of active distribution network considering source-network-load. IET Gener. Transm. Distrib. 2019, 13, 5586–5596. [Google Scholar] [CrossRef]
- Leithon, J.; Lim, T.J.; Sun, S. Online demand response strategies for non-deferrable loads with renewable energy. IEEE Trans. Smart Grid 2018, 9, 5227–5235. [Google Scholar] [CrossRef]
- Michael, D.; Florian, P.; Antonello, M. Hierarchical distributed robust optimization for demand response services. IEEE Trans. Smart Grid 2018, 9, 6018–6029. [Google Scholar]
- Vrettos, E.; Andersson, G. Scheduling and provision of secondary frequency reserves by aggregations of commercial buildings. IEEE Trans. Sustain. Energy 2016, 7, 850–864. [Google Scholar] [CrossRef]
- Herre, L.; Mathieu, J.L.; Soder, L. Impact of market timing on the profit of a risk-averse load aggregator. IEEE Trans. Power Syst. 2020, 35, 3970–3980. [Google Scholar] [CrossRef]
- Lakshmanan, V.; Marinelli, M.; Hu, J.; Bindner, H.W. Provision of secondary frequency control via demand response activation on thermostatically controlled loads: Solutions and experiences from Denmark. Appl. Energy 2016, 173, 470–480. [Google Scholar] [CrossRef] [Green Version]
- Totu, L.C.; Wisniewski, R.; Leth, J. Demand response of a TCL population using switching-rate actuation. IEEE Trans. Control. Syst. Technol. 2017, 25, 1537–1551. [Google Scholar] [CrossRef]
- Mahdavi, N.; Braslavsky, J.H. Modelling and control of ensembles of variable-speed air conditioning loads for demand response. IEEE Trans. Smart Grid 2020, 11, 4249–4260. [Google Scholar] [CrossRef]
- Hassan, A.; Mieth, R.; Deka, D.; Dvorkin, Y. Stochastic and distributionally robust load ensemble control. IEEE Trans. Power Syst. 2020, 35, 4678–4688. [Google Scholar] [CrossRef]
- Wu, X.; Hu, X.; Moura, S.; Yin, X.; Pickert, V. Stochastic control of smart home energy management with plug-in electric vehicle battery energy storage and photovoltaic array. J. Power Sources 2016, 333, 203–212. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Hu, X.; Teng, Y.; Qian, S.; Cheng, R. Optimal integration of a hybrid solar-battery power source into smart home nanogrid with plug-in electric vehicle. J. Power Sources 2017, 363, 277–283. [Google Scholar] [CrossRef] [Green Version]
- Koltsaklis, N.; Panapakidis, I.P.; Pozo, D.; Christoforidis, G.C. A prosumer model based on smart home energy management and forecasting techniques. Energies 2021, 14, 1724. [Google Scholar] [CrossRef]
- Zhang, G.; Tan, S.T.; Wang, G.G. Real-time smart charging of electric vehicles for demand charge reduction at non-residential sites. IEEE Trans. Smart Grid 2018, 9, 4027–4037. [Google Scholar] [CrossRef]
- Chen, Y.; Chang, J.M. Fair demand response with electric vehicles for the cloud based energy management service. IEEE Trans. Smart Grid 2018, 9, 458–468. [Google Scholar] [CrossRef]
- Hafez, O.; Bhattacharya, K. Integrating EV charging stations as smart loads for demand response provisions in distribution systems. IEEE Trans. Smart Grid 2018, 9, 1096–1106. [Google Scholar] [CrossRef]
- Zhang, Y.; Shen, S.; Mathieu, J.L. Distributionally robust chance-constrained optimal power flow with uncertain renewables and uncertain reserves provided by loads. IEEE Trans. Power Syst. 2017, 32, 1378–1388. [Google Scholar] [CrossRef]
- Fang, X.; Hodge, B.; Du, E.; Kang, C.; Li, F. Introducing uncertainty components in locational marginal prices for pricing wind power and load uncertainties. IEEE Trans. Power Syst. 2019, 34, 2013–2024. [Google Scholar] [CrossRef]
- Vrakopoulou, M.; Li, B.; Mathieu, J.L. Chance constrained reserve scheduling using uncertain controllable loads part I: Formulation and scenario-based analysis. IEEE Trans. Smart Grid 2019, 10, 1608–1617. [Google Scholar] [CrossRef]
- Wang, B.; Dehghanian, P.; Zhao, D. Chance-constrained energy management system for power grids with high proliferation of renewables and electric vehicles. IEEE Trans. Smart Grid 2020, 11, 2324–2336. [Google Scholar] [CrossRef]
- Wang, J.; Shi, Y.; Zhou, Y. Intelligent demand response for industrial energy management considering thermostatically controlled loads and EVs. IEEE Trans. Ind. Inform. 2019, 15, 3432–3442. [Google Scholar] [CrossRef] [Green Version]
- Kleywegt, A.J.; Shapiro, A.; Homemdemello, T. The sample average approximation method for stochastic discrete optimization. SIAM J. Optim. 2002, 12, 479–502. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Wang, X.; Huang, T.; Yang, C. Hybrid intelligence assisted sample average approximation method for chance constrained dynamic optimization. IEEE Trans. Ind. Inform. 2021, 17, 6409–6418. [Google Scholar] [CrossRef]
- Samadi, P.; Mohsenian-Rad, H.; Schober, R.; Wong, V.W.S. Advanced demand side management for the future smart grid using mechanism design. IEEE Trans. Smart Grid 2012, 3, 1170–1180. [Google Scholar] [CrossRef]
- Rahbari-Asr, N.; Ojha, U.; Zhang, Z.; Chow, M.-Y. Incremental welfare consensus algorithm for cooperative distributed generation/demand response in smart grid. IEEE Trans. Smart Grid 2014, 5, 2836–2845. [Google Scholar] [CrossRef]
- Hu, J.; Cao, J.; Chen, M.Z.Q.; Yu, J.; Yao, J.; Yang, S.; Yong, T. Load following of multiple heterogeneous TCL aggregators by centralized control. IEEE Trans. Power Syst. 2017, 32, 3157–3167. [Google Scholar] [CrossRef]
- Bashash, S.; Fathy, H.K. Modeling and control of aggregate air conditioning loads for robust renewable power management. IEEE Trans. Control. Syst. Technol. 2013, 21, 1318–1327. [Google Scholar] [CrossRef]
- Bashash, S.; Fathy, H.K. Transport-based load modeling and sliding mode control of plug-in electric vehicles for robust renewable power tracking. IEEE Trans. Smart Grid 2012, 3, 526–534. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generation Unit Parameters (MW) | ||||||
|---|---|---|---|---|---|---|
| G | ||||||
| G1 | 0.0451 | 2.8213 | 15 | 20 | 25 | 200 |
| G2 | 0.0365 | 2.2421 | 22 | 24 | 20 | 180 |
| G3 | 0.0274 | 3.1518 | 20 | 25 | 30 | 200 |
| G4 | 0.0518 | 2.8523 | 18 | 12 | 30 | 150 |
| G5 | 0.0818 | 4.1533 | 20 | 16 | 20 | 200 |
| G6 | 0.0353 | 2.3472 | 15 | 15 | 20 | 160 |
| Demand Agent Parameters (MW) | ||||||
| L | ||||||
| TCL A1 | 0.2116 | 21.1621 | 4 | 6 | 10 | 50 |
| TCL A2 | 0.2452 | 19.6168 | 5 | 9 | 15 | 40 |
| PEV A1 | 0.2021 | 18.1892 | 8 | 6 | 10 | 45 |
| PEV A2 | 0.2456 | 24.2234 | 5 | 7 | 12 | 50 |
| Ag. | R | C | ||||||
|---|---|---|---|---|---|---|---|---|
| A1 | 11780 | 0.52 | 5.12 | 8.82 | 19.63 | 2.92 | 23.15 | 1 |
| A2 | 9730 | 0.49 | 5.44 | 9.89 | 16.56 | 2.71 | 22.45 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Cao, J. Demand Response Optimal Dispatch and Control of TCL and PEV Agents with Renewable Energies. Fractal Fract. 2021, 5, 140. https://doi.org/10.3390/fractalfract5040140
Hu J, Cao J. Demand Response Optimal Dispatch and Control of TCL and PEV Agents with Renewable Energies. Fractal and Fractional. 2021; 5(4):140. https://doi.org/10.3390/fractalfract5040140
Chicago/Turabian StyleHu, Jianqiang, and Jinde Cao. 2021. "Demand Response Optimal Dispatch and Control of TCL and PEV Agents with Renewable Energies" Fractal and Fractional 5, no. 4: 140. https://doi.org/10.3390/fractalfract5040140
APA StyleHu, J., & Cao, J. (2021). Demand Response Optimal Dispatch and Control of TCL and PEV Agents with Renewable Energies. Fractal and Fractional, 5(4), 140. https://doi.org/10.3390/fractalfract5040140