
Teleoperation of Highly Automated Vehicles in Public Transport: User-Centered Design of a Human-Machine Interface for Remote-Operation and Its Expert Usability Evaluation



Abstract
:1. Introduction
1.1. Automated Driving and Public Transport
1.2. Teleoperation
1.3. Psychological Background
1.3.1. Monitoring
1.3.2. Intervening
1.4. Study Objectives
- Features: The remote-operation workstation must provide necessary features to monitor the automation, provide disturbance information and support remote-operator with resolving the disturbance.
- Information: The remote-operation workstation must provide necessary information to monitor the automation, provide disturbance information and support them with resolving the disturbance.
- Situation Awareness: The remote-operation workstation must provide a high level of situation awareness to the remote-operator.
- Usability: The remote-operation workstation must have good usability.
- User Acceptance: The remote-operation workstation must have a high user acceptance.
- Attention: The remote-operation workstation must direct the user’s attention to information that is currently relevant.
- Capacity: The remote-operation workstation must not overwhelm the user’s mental and physical capacities.
2. Materials and Methods
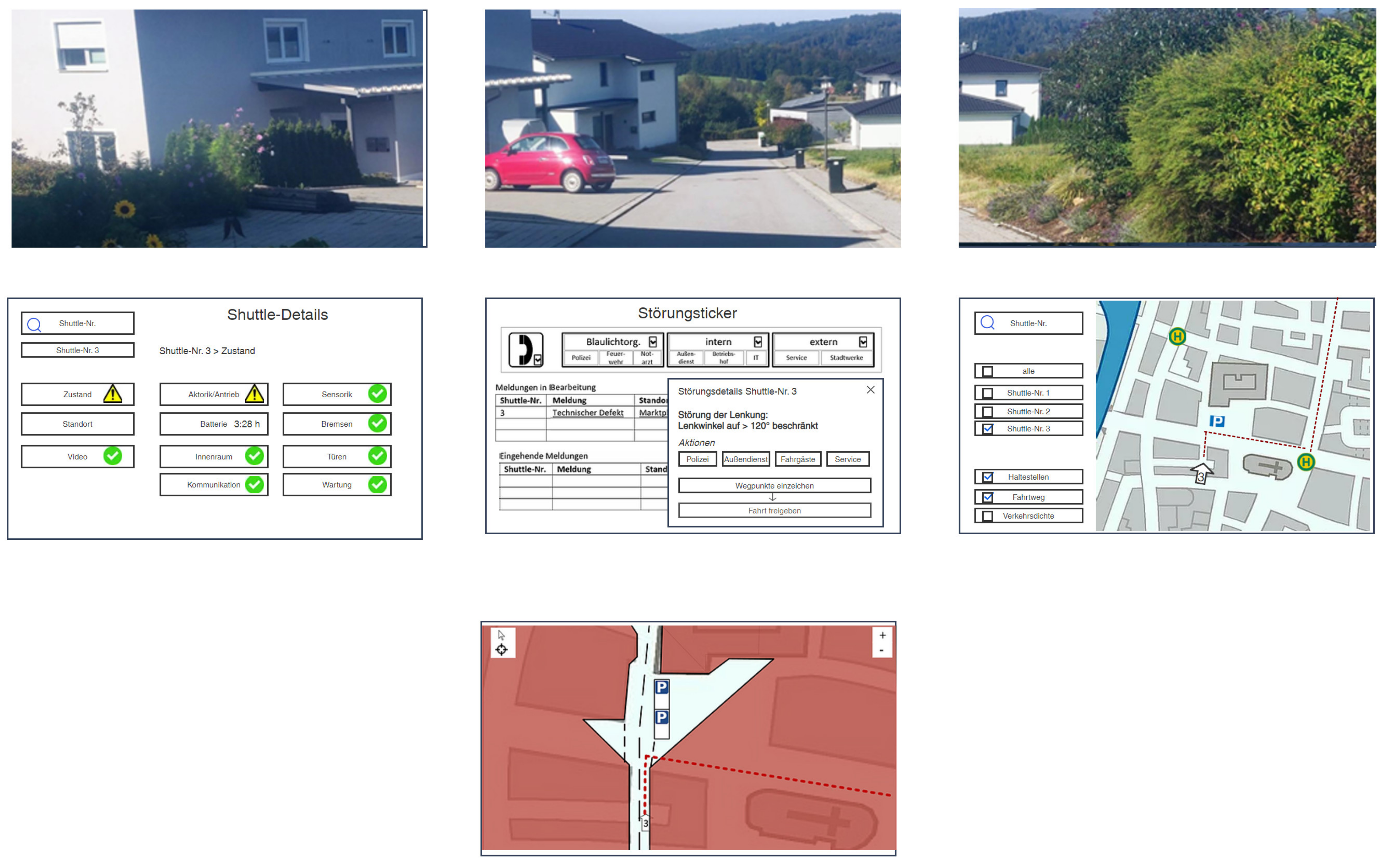
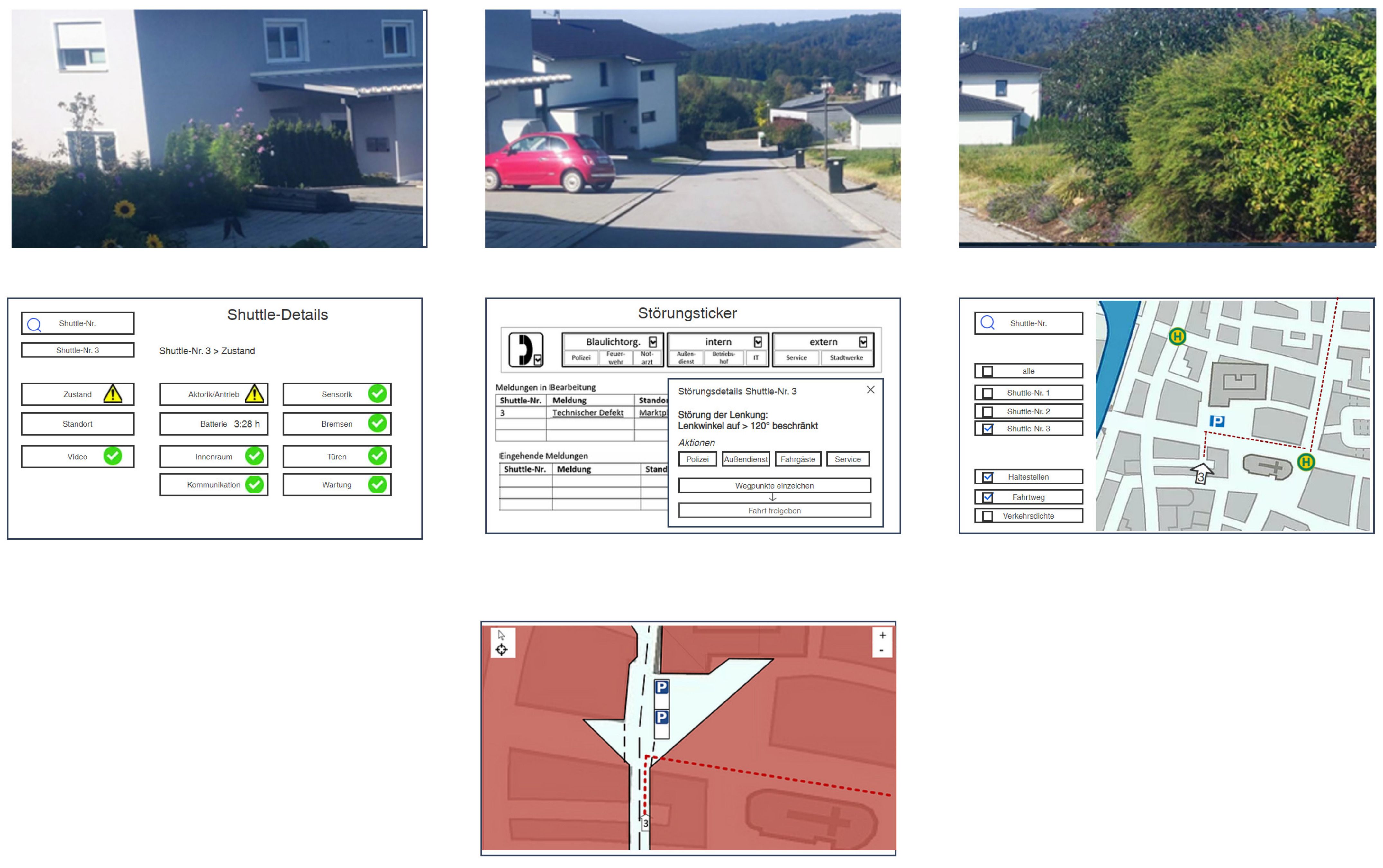
2.1. Prototype
2.1.1. “Video Screens”
2.1.2. “Details Screen”
2.1.3. “Disturbances Screen”
2.1.4. “Map Screen”
2.1.5. “Touchscreen”
2.2. Scenarios
2.3. Participants
2.4. Study Design
2.5. Dependent Variables
2.5.1. Questionnaires
2.5.2. Structured Interview
2.6. Procedure
2.7. Data Analysis
3. Results
3.1. Criterion 1: Features
3.2. Criterion 2: Information Parameters
3.3. Criterion 3: Situation Awareness
3.4. Criterion 4: Usability
3.5. Criterion 5: User Acceptance
3.6. Criterion 6: Attention
3.7. Criterion 7: Capacity
3.8. Additional Improvement Suggestions
4. Discussion
4.1. Interpretation of Results
4.2. Refinement of the Prototype
4.3. Transfer of the Prototype
4.3.1. Transfer to Other Scenarios
4.3.2. Transfer to Other Vehicle Types
4.4. Limitations
5. Outlook
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- IHS. Autonomous Cars: Not If but When; IHS Automotive: Northville, MI, USA, 2014. [Google Scholar]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three Decades of Driver Assistance Systems: Review and Future Perspectives. IEEE Intell. Transport. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Bhavsar, P.; Das, P.; Paugh, M.; Dey, K.; Chowdhury, M. Risk Analysis of Autonomous Vehicles in Mixed Traffic Streams. Transp. Res. Rec. 2017, 2625, 51–61. [Google Scholar] [CrossRef] [Green Version]
- Gnatzig, S.; Chucholowski, F.; Tang, T.; Lienkamp, M. A system design for teleoperated road vehicles. In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics, Reykjavík, Iceland, 29–31 July 2013; pp. 231–238. [Google Scholar] [CrossRef] [Green Version]
- Chucholowski, F.; Gnatzig, S.; Tang, T.; Hosseini, A.; Lienkamp, M. Teleoperiertes Fahren-Aktuelle Entwicklungen. In Proceedings of the 6. Tagung Fahrerassistenz, Munich, Germany, 28–29 November 2013. [Google Scholar]
- Society of Automotive Engineers. SAE J 3016-2018. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Neumeier, S.; Wintersberger, P.; Frison, A.K.; Becher, A.; Facchi, C.; Riener, A. Teleoperation: The Holy Grail to solve problems of automated driving? Sure, but latency matters. In Proceedings of the 11th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications, Utrecht, The Netherlands, 21–25 September 2019; pp. 186–197. [Google Scholar] [CrossRef]
- Sheridan, T.B. Teleoperation, telerobotics and telepresence: A progress report. Control Eng. Pract. 1995, 3, 205–214. [Google Scholar] [CrossRef]
- Gnatzig, S.; Schuller, F.; Lienkamp, M. Human-machine interaction as key technology for driverless driving—A trajectory-based shared autonomy control approach. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 913–918. [Google Scholar] [CrossRef]
- Litman, T.A. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2020. [Google Scholar]
- Schoitsch, E. Autonomous Vehicles and Automated Driving Status, Perspectives and Societal Impact. In Proceedings of the 24th annual IDIMT conference, Poděbrady, Czech Republic, 7–9 September 2016; pp. 405–423. [Google Scholar]
- Milakis, D.; Snelder, M.; van Arem, B.; van Wee, B.; Homem De Almeida Correia, G. Development and transport implications of automated vehicles in the Netherlands: Scenarios for 2030 and 2050. Eur. J. Transp. Infrastruct. Res. 2017, 17, 1. [Google Scholar] [CrossRef]
- Lutin, J. Not If, but When: Autonomous Driving and the Future of Transit. JPT 2018, 21, 92–103. [Google Scholar] [CrossRef]
- Sherry, L.; Shortle, J.; Donohue, G.; Berlin, B.; West, J. Autonomous Systems Design, Testing, and Deployment: Lessons Learned from The Deployment of an Autonomous Shuttle Bus. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 8–10 September 2020. [Google Scholar] [CrossRef]
- Rehrl, K.; Zankl, C. Digibus©: Results from the first self-driving shuttle trial on a public road in Austria. Eur. Transp. Res. Rev. 2018, 10. [Google Scholar] [CrossRef]
- Backhaus, R. Automatic Shuttle Buses—From the Test Track to Scheduled Services. ATZ Electron. Worldw. 2020, 15, 34–39. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Shaheen, S. Automated Vehicles, On-Demand Mobility, and Environmental Impacts. Curr. Sustain. Renew. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef] [Green Version]
- Fagnant, D.J.; Kockelman, K.M. The travel and environmental implications of shared autonomous vehicles, using agent-based model scenarios. Transp. Res. Part C Emerging Technol. 2014, 40, 1–13. [Google Scholar] [CrossRef]
- Hyland, M.; Mahmassani, H.S. Operational benefits and challenges of shared-ride automated mobility-on-demand services. Transp. Res. Part A Policy Pract. 2020, 134, 251–270. [Google Scholar] [CrossRef]
- Fong, T.; Thorpe, C. Vehicle Teleoperation Interfaces. Auton. Robots 2001, 11, 9–18. [Google Scholar] [CrossRef]
- Kay, J.S. STRIPE: Remote driving using limited image data. In Proceedings of the Conference on Human Factors in Computing Systems, Denver, CO, USA, 7–11 May 1995; pp. 107–108. [Google Scholar]
- Kim, J.S.; Ryu, J.H. Shared teleoperation of a vehicle with a virtual driving interface. In Proceedings of the International Conference on Control, Automation and Systems, Gwangju, Korea, 20–23 October 2013; pp. 851–857, ISBN 9788993215052. [Google Scholar]
- Chen, T.L.T. Methods for Improving the Control of Teleoperated Vehicles. PhD Thesis, Technische Universität, Munich, Fermany, 2015. [Google Scholar]
- Sheridan, T.B. Telerobotics, Automation, and Human Supervisory Control; MIT Press: Cambridge, MA, USA, 1992; ISBN 0262193167. [Google Scholar]
- Thomson, D.R.; Besner, D.; Smilek, D. A resource-control account of sustained attention: Evidence from mind-wandering and vigilance paradigms. Perspect. Psychol. Sci. 2015, 10, 82–96. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D.; Goh, J.; Helleberg, J.; Horrey, W.J.; Talleur, D.A. Attentional Models of Multitask Pilot Performance Using Advanced Display Technology. Human Factors: J. Hum. Factors Ergon. Soc. 2003, 45, 360–380. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D. Noticing Events in the Visual Workplace: The SEEV and NSEEV Models. In The Cambridge Handbook of Applied Perception Research; Hoffman, R.R., Hancock, P.A., Scerbo, M.W., Parasuraman, R., Szalma, J.L., Eds.; Cambridge University Press: New York, NY, USA, 2015; pp. 749–768. [Google Scholar]
- Senders, J.W. The Human Operator as a Monitor and Controller of Multidegree of Freedom Systems. IEEE Trans. Hum. Factors Electron. 1964, HFE-5, 2–5. [Google Scholar] [CrossRef]
- Sanders, A.F.; Houtmans, M. Perceptual processing modes in the functional visual field. Acta Psychol. 1985, 58, 251–261. [Google Scholar] [CrossRef]
- Boot, W.R.; Kramer, A.F.; Becic, E. Capturing Attention in the Laboratory and the Real World. In Attention: From Theory to Practice; Kramer, A.F., Wiegmann, D.A., Kirlik, A., Eds.; Oxford University Press: Oxford, NY, USA, 2007; pp. 27–44. ISBN 9780195305722. [Google Scholar]
- Taylor, R.M.; Selcon, S.J.; Swinden, A.D. Measurement of Situational Awareness and Performance: A Unitary SART Index Predicts Performance on a Simulated ATC Task. In Human Factors in Aviation Operations, Proceedings of the 21st Conference of the European Association for Aviation Psychology (EAAP), Dublin, Ireland, March 1994; Fuller, R., Johnston, R., McDonald, N., Eds.; Ashgate Publishing: Aldershot, UK, 1995. [Google Scholar]
- Merat, N.; Seppelt, B.; Louw, T.; Engström, J.; Lee, J.D.; Johansson, E.; Green, C.A.; Katazaki, S.; Monk, C.; Itoh, M.; et al. The “Out-of-the-Loop” concept in automated driving: Proposed definition, measures and implications. Cognit. Technol. Work 2019, 21, 87–98. [Google Scholar] [CrossRef] [Green Version]
- Chellali, R.; Baizid, K. What maps and what displays for remote situation awareness and ROV localization? Lect. Notes Comput. Sci. 2011, 6772 LNCS, 364–372. [Google Scholar] [CrossRef]
- Neumeier, S.; Walelgne, E.A.; Bajpai, V.; Ott, J.; Facchi, C. Measuring the feasibility of teleoperated driving in mobile networks. In Proceedings of the 3rd Network Traffic Measurement and Analysis Conference, Paris, France, 19–21 June 2019; pp. 113–120. [Google Scholar] [CrossRef] [Green Version]
- Minsky, M. Telepresence. Available online: https://web.media.mit.edu/~minsky/papers/Telepresence.html (accessed on 4 May 2021.).
- International Organization for Standardization. ISO Standard No. 9421-11:2018. Ergonomics of Human-System Interaction—Part 11: Usability: Definitions and Concepts. Available online: https://www.iso.org/obp/ui/#iso:std:iso:9241:-11:ed-2:v1:en (accessed on 4 May 2021).
- van der Laan, J. Acceptance of Advanced Transportation Telematics. Transp. Res. 1997, 5, 1–10. [Google Scholar]
- RealLab Hamburg. Autonomes Fahren. Available online: https://reallab-hamburg.de/projekte/autonomes-fahren/ (accessed on 25 March 2021).
- Weimer, J. U-Shift—A Novel on-the-Road Modular Vehicle Concept. Available online: https://verkehrsforschung.dlr.de/public/documents/2019/DLR_U-Shift_Presentation-EN_V1.6_0.pdf (accessed on 4 May 2021).
- German Aerospace Center. DLR Robotic Vehicles Will Support Deliveries in Difficult Areas for the World Food Programme. Available online: https://www.dlr.de/content/en/articles/news/2020/04/20201021_remote-controlled-access-in-crisis-regions.html (accessed on 4 May 2021).
- International Organization for Standardization. ISO Standard No. 9421-210:2019. Ergonomics of Human-System Interaction—Part 210: Human-Centered Design for Interactive Systems. Available online: https://www.iso.org/standard/77520.html (accessed on 4 May 2021).
- Kettwich, C.; Dreßler, A. Requirements of Future Control Centers in Public Transport. In Proceedings of the 12th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (Virtual Event), Washington, DC, USA, 21–22 September 2020; pp. 69–73. [Google Scholar] [CrossRef]
- Franke, T.; Attig, C.; Wessel, D. A Personal Resource for Technology Interaction: Development and Validation of the Affinity for Technology Interaction (ATI) Scale. Int. J. Hum. Comput. Interact. 2019, 35, 456–467. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In Human Mental Workload; Hancock, P.A., Meshkati, N., Eds.; Elsevier: Amsterdam, The Netherlands, 1988. [Google Scholar]
- Hart, S.G. NASA-Task Load Index (NASA-TLX); 20 Years Later. In Proceedings of the Human Factors and Ergonomics Society 50th Annual Meeting, San Francisco, CA, USA, 16–20 October 2006; pp. 904–908. [Google Scholar]
- Lewis, J.R. Psychometric Evaluation of the PSSUQ Using Data from Five Years of Usability Studies. Int. J. Hum. Comput. Interact. 2002, 14, 463–488. [Google Scholar] [CrossRef]
- Taylor, R.M. Situation awareness rating technique (SART): The development of a tool for aircrew systems design. Situational Awareness in Aerospace Operations; Routledge: London, UK, 1990. [Google Scholar]
- Mayring, P. Qualitative Inhaltsanalyse. Grundlagen und Techniken, 7th ed.; Deutscher Studien Verlag: Weinheim, Germany, 2000. [Google Scholar]
- Georg, J.M.; Feiler, J.; DIermeyer, F.; Lienkamp, M. Teleoperated Driving, a Key Technology for Automated Driving? Comparison of Actual Test Drives with a Head Mounted Display and Conventional Monitors. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 3403–3408. [Google Scholar] [CrossRef]
- Kiwibot. Launch a Robot Delivery Service in Days with a One Stop Solution. Available online: https://www.kiwibot.com/ (accessed on 31 January 2021).
- Postmates. Postmates Unveils Latest Addition To Its Fleet: Meet Serve—The Autonomous Delivery Rover. Cision PR Newswire. Available online: https://www.prnewswire.com/news-releases/postmates-unveils-latest-addition-to-its-fleet-meet-serve---the-autonomous-delivery-rover-300764897.html (accessed on 4 May 2021).

{kind=link}
| Screen | Elements Level 1 | Elements Level 2 |
|---|---|---|
| “Video screens” | Video images | - |
| “Details screen” | State | Actuators |
| Sensorics | ||
| Battery | ||
| … | ||
| Position | Street name | |
| Schedule | ||
| Video | Available cameras | |
| “Disturbances screen” | Communication bar | Available communication partners |
| Disturbances ticker | Notifications in progress | |
| Incoming notifications | ||
| “Map screen” | Map | - |
| Layers | Stops | |
| Trajectories | ||
| Traffic density | ||
| … | ||
| “Touchscreen” | Map | - |
| Construct | Memp | SDemp | 95% CI [LL, UL] 1 | Mcrit | V2 | p (est.) 3 | |
|---|---|---|---|---|---|---|---|
| SEEV: Resolving Disturbances | |||||||
| Scenario A | 3.80 | 1.16 | [3.06, 4.53] | 3.00 | 56.00 | <0.05 | |
| Scenario B | 3.92 | 1.38 | [3.04, 4.79] | 3.00 | 63.00 | <0.05 | |
| Scenario C | 4.67 | 0.44 | [4.38, 4.95] | 3.00 | 78.00 | <0.001 | |
| Usefulness Rating of Features | |||||||
| “Map screen” | |||||||
| Selection of shuttles | 4.83 | 0.39 | [4.59, 5.08] | 3.00 | 78.00 | <0.001 | |
| Adjustment of map | 4.92 | 0.29 | [4.73, 5.10] | 3.00 | 78.00 | <0.001 | |
| Display of following stops | 5.00 | 0.00 | [5.00, 5.00] | 3.00 | 78.00 | <0.001 | |
| Display of driving path | 4.58 | 0.90 | [4.01, 5.16] | 3.00 | 76.00 | <0.01 | |
| Display of traffic density | 3.75 | 0.62 | [3.36, 4.14] | 3.00 | 36.00 | <0.01 | |
| Overall | 4.64 | 0.22 | [4.50, 4.78] | 3.00 | 78.00 | <0.01 | |
| “Disturbances screen” | |||||||
| Communication bar | 4.50 | 1.00 | [3.86, 5.14] | 3.00 | 64.50 | <0.01 | |
| Display of incoming disturbances | 4.92 | 0.29 | [4.73, 5.10] | 3.00 | 78.00 | <0.001 | |
| Display of disturbances currently processed | 4.58 | 0.67 | [4.16, 5.01] | 3.00 | 66.00 | <0.01 | |
| Pop-up-window to overcome disturbance | 4.67 | 0.49 | [4.35, 4.98] | 3.00 | 78.00 | <0.001 | |
| Pop-up-window to check assumptions | 4.17 | 0.94 | [3.57, 4.76] | 3.00 | 36.00 | <0.01 | |
| Overall | 4.61 | 0.46 | [4.32, 4.90] | 3.00 | 78.00 | <0.01 | |
| “Video screens” | |||||||
| Overall | 4.75 | 0.62 | [4.36, 5.14] | 3.00 | 66.00 | <0.001 | |
| “Details screen” | |||||||
| Display of state | 4.33 | 1.07 | [3.65, 5.02] | 3.00 | 53.50 | <0.01 | |
| Display of position | 4.25 | 0.62 | [3.86, 4.64] | 3.00 | 66.00 | <0.01 | |
| Display of next stops | 3.92 | 0.51 | [3.59, 4.24] | 3.00 | 55.00 | <0.01 | |
| Display of estimated times of departure | 4.25 | 0.45 | [3.96, 4.54] | 3.00 | 78.00 | <0.001 | |
| Display of actual times of departure | 4.33 | 0.49 | [4.02, 4.65] | 3.00 | 78.00 | <0.001 | |
| Selection of cameras | 4.50 | 1.00 | [3.86, 5.14] | 3.00 | 64.50 | <0.01 | |
| Overall | 4.30 | 0.45 | [4.01, 4.58] | 3.00 | 78.00 | <0.01 | |
| “Touchscreen” | |||||||
| Overall | 4.58 | 0.67 | [4.16, 5.01] | 3.00 | 66.00 | <0.01 | |
| Features overall | 4.57 | 0.26 | [4.41, 4.73] | 3.00 | 78.00 | <0.01 | |
| Feature Liked | N | Typical Utterance |
|---|---|---|
| Overall Design | ||
| Division of Screens | 4 | “I like how the information is distributed across several monitors.” |
| Clarity | 2 | “I liked the interface very much, it is very clear and logically structured.” |
| Display of Relevant Information | 2 | “I was not disturbed by unnecessary notifications.” |
| “Disturbances Screen” | ||
| Steps to Overcome Disturbance | 4 | “The process is logical, practicable, and pretty clear.” |
| Communication Link | 2 | “You can directly get in touch with other people.” |
| Presentation of Disturbances | 2 | “Whenever something was not in order, the details about it were presented with an exclamation mark.” |
| “Disturbances Screen” | 2 | “I appreciate that the central screen is reserved for incoming disturbance notifications.” |
| Distribution of Tasks for Processing Disturbances | 2 | “Accepting a task makes clear who is responsible for what.” |
| “Touchscreen” | ||
| Waypoints | 2 | “Setting waypoints is useful to get the shuttle away from the road.” |
| “Video Screens” | ||
| Video Images | 5 | “The video images are very helpful.“ |
| Feature Missed | N | MImportance | Typical Utterance |
|---|---|---|---|
| “Details Screen” | |||
| Relevant Information about Disturbances | 2 | 4.50 | “It would be better to focus on important things” |
| Less Screens | 2 | 4.50 | “There should not be more than five monitors” |
| “Disturbances Screen” | |||
| Prioritization of Disturbances (Using Color-Coding) | 3 | 5.00 | “Priority should be given to passenger emergency calls.” |
| Visual Highlighting of Incoming Notifications | 3 | 4.67 | “Incoming notifications should be visually highlighted” |
| Auditory Highlighting of Incoming Notifications | 2 | 4.50 | “I want to hear a sound when a notification comes in” |
| “Map Screen” | |||
| Clear (Colorful) Display of Trajectory | 2 | 4.50 | “Highlight the trajectory by making it bold or using colors. The dashed lines are not clear” |
| “Video Screens” | |||
| Moving Cameras | 3 | 4.00 | “Being able to control the cameras, for example move them or zoom in, would be a meaningful improvement” |
| Less Screens | 2 | 4.00 | “One monitor is enough” |
| Camera Showing Vehicle from Outside | 2 | 3.50 | “Having a bird-view outside camera would help avoiding the blind spot” |
| Information Parameter Missed | N | MImportance | Typical Utterance |
|---|---|---|---|
| “Details Screen” | |||
| Occupancy | 4 | 4.25 | “I want to know how many passengers are in the vehicle.” |
| “Map Screen” | |||
| Exact Position with Street Names and House Numbers | 2 | 5.00 | “The exact position with street names house numbers should be shown in the map” |
| Information on Infrastructure and Other Additional Layers | 2 | 3.00 | “Elements from the infrastructure, such as cameras on stops, should be visible on the map” |
| Construct | Memp | SDemp | 95% CI [LL, UL] 1 | Mcrit | V2 | p (est.) 3 |
|---|---|---|---|---|---|---|
| SART Overall | ||||||
| Scenario A | 3.18 | 0.48 | [2.87, 3.48] | 3.00 | 54.50 | 0.24 |
| Scenario B | 3.05 | 0.33 | [2.84, 3.26] | 3.00 | 40.50 | 0.53 |
| Scenario C | 2.98 | 0.37 | [2.74, 3.22] | 3.00 | 37.50 | 0.93 |
| Projection of Future (SEEV) | ||||||
| Scenario A | 3.88 | 1.03 | [3.22, 4.53] | 3.00 | 58.50 | <0.05 |
| Scenario B | 3.21 | 1.23 | [2.42, 3.99] | 3.00 | 33.50 | 0.28 |
| Scenario C | 4.17 | 0.58 | [3.80, 4.53] | 3.00 | 78.00 | <0.01 |
| Construct | Memp | SDemp | 95% CI [LL, UL] 1 | Mcrit | V2 | p (est.) 3 |
|---|---|---|---|---|---|---|
| PSSUQ Overall | 5.51 | 1.17 | [4.77, 6.26] | 4.00 | 63.00 | <0.01 |
| System Usefulness | 5.74 | 1.14 | [5.02, 6.46] | 4.00 | 66.00 | <0.01 |
| Information Quality | 5.40 | 1.10 | [4.70, 6.11] | 4.00 | 73.00 | <0.01 |
| Interface Quality | 5.25 | 1.70 | [4.17, 6.33] | 4.00 | 57.00 | <0.05 |
| Construct | Memp | SDemp | 95% CI [LL, UL] 1 | Mcrit | V2 | p (est.) 3 |
|---|---|---|---|---|---|---|
| VDL Overall | ||||||
| Pre-test | 3.93 | 0.71 | [3.48, 4.37] | 3.00 | 54.00 | <0.01 |
| Post-test | 4.02 | 0.84 | [3.49, 4.55] | 3.00 | 74.00 | <0.01 |
| Construct | Memp | SDemp | 95% CI [LL, UL] 1 | Mcrit | V2 | p (est.) 3 | |
|---|---|---|---|---|---|---|---|
| SEEV Overall | |||||||
| Scenario A | 3.75 | 0.94 | [3.15, 4.35] | 3.00 | 67.00 | <0.05 | |
| Scenario B | 3.51 | 1.26 | [2.71, 4.31] | 3.00 | 57.50 | 0.08 | |
| Scenario C | 4.34 | 0.43 | [4.07, 4.62] | 3.00 | 78.00 | <0.01 | |
| SEEV Presentation of Information | |||||||
| Scenario A | 3.67 | 0.96 | [3.06, 4.27] | 3.00 | 55.00 | <0.05 | |
| Scenario B | 3.46 | 1.35 | [2.60, 4.32] | 3.00 | 55.00 | 0.11 | |
| Scenario C | 4.27 | 0.62 | [3.88, 4.66] | 3.00 | 66.00 | <0.01 | |
| SART | |||||||
| Scenario A | Att.4 Demand | 2.36 | 0.64 | [1.95, 2.77] | 132.00 | <0.001 5 | |
| Att. Supply | 3.88 | 0.62 | [3.48, 4.27] | ||||
| Scenario B | Att. Demand | 2.03 | 0.89 | [1.46, 2.60] | 138.00 | <0.001 | |
| Att. Supply | 3.98 | 0.76 | [3.50, 4.46] | ||||
| Scenario C | Att. Demand | 1.64 | 0.76 | [1.16, 2.12] | 138.00 | <0.001 | |
| Att. Supply | 3.60 | 0.58 | [3.24, 3.97] | ||||
| Construct | Memp | SDemp | 95% CI [LL, UL] 1 | Mcrit | V2 | p (est.) 3 |
|---|---|---|---|---|---|---|
| NASA-TLX | ||||||
| Scenario A | 5.63 | 4.56 | [2.70, 8.55] | 11.00 | 5.00 | <0.01 |
| Scenario B | 6.04 | 4.76 | [3.01, 9.07] | 11.00 | 6.00 | <0.01 |
| Scenario C | 3.47 | 2.75 | [1.72, 5.22] | 11.00 | 0.00 | <0.01 |
| Improvements Suggested | N |
|---|---|
| Design | |
| Only Relevant Information/Clear Presentation | 3 |
| Prioritize/Highlight Particularly Important Information | 2 |
| Less Monitors/All Video Images on one Monitor | 2 |
| Monitor for Overview | 2 |
| “Disturbances Screen” | |
| Only one Click for Accepting and Editing Disturbance Notification | 3 |
| Categorizing Incoming Disturbance/Delay Notifications | 3 |
| Highlighting/Prioritizing Incoming Disturbance Notifications | 3 |
| Improving Check of Prerequisites for Clearance (Making Them Faster/Customizable/Immediately After Each Step in Disturbance Resolution Process) | 3 |
| Documenting Prerequisite Checks for Clearance/Disturbances | 2 |
| “Touchscreen” | |
| Marking Bypasses | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kettwich, C.; Schrank, A.; Oehl, M. Teleoperation of Highly Automated Vehicles in Public Transport: User-Centered Design of a Human-Machine Interface for Remote-Operation and Its Expert Usability Evaluation. Multimodal Technol. Interact. 2021, 5, 26. https://doi.org/10.3390/mti5050026
Kettwich C, Schrank A, Oehl M. Teleoperation of Highly Automated Vehicles in Public Transport: User-Centered Design of a Human-Machine Interface for Remote-Operation and Its Expert Usability Evaluation. Multimodal Technologies and Interaction. 2021; 5(5):26. https://doi.org/10.3390/mti5050026
Chicago/Turabian StyleKettwich, Carmen, Andreas Schrank, and Michael Oehl. 2021. "Teleoperation of Highly Automated Vehicles in Public Transport: User-Centered Design of a Human-Machine Interface for Remote-Operation and Its Expert Usability Evaluation" Multimodal Technologies and Interaction 5, no. 5: 26. https://doi.org/10.3390/mti5050026
APA StyleKettwich, C., Schrank, A., & Oehl, M. (2021). Teleoperation of Highly Automated Vehicles in Public Transport: User-Centered Design of a Human-Machine Interface for Remote-Operation and Its Expert Usability Evaluation. Multimodal Technologies and Interaction, 5(5), 26. https://doi.org/10.3390/mti5050026