1. Introduction
Large-scale civil infrastructures such as bridges and wind turbines are subjected to various external loads such as earthquakes, wind, traffic, and other environmental excitation during service life, resulting in rapid aging and structural deterioration [
1,
2]. In recent decades, Structural Health Monitoring (SHM) has attained significant interest to the infrastructure owners, structural engineers, and decision-makers as it provides powerful tools for the diagnosis and prognosis of as-is structural conditions [
3]. Vibration-based modal identification methods utilize acceleration measurements to detect the physical and modal parameters that can be used for the identification and localization of damage [
4,
5]. However, there are several implementation challenges for these modal identification methods in different large-scale real-life structures such as bridges and wind turbines, depending on their overall dimensions, support conditions, measurement noise, number of available sensors, and operational loads [
6,
7]. This paper evaluates the performance of vibration-based SHM techniques in two full-scale structures subjected to these challenges.
Large-span bridges [
8,
9] and offshore wind turbines [
10,
11,
12] caught worldwide attention recently. Bridges play a vital role in transportation infrastructure, which affects the economic growth and prosperity of a nation. A recent American infrastructure report card (2021) indicated that one-third of America’s infrastructure is at risk of significant deterioration, with about 240,000 bridges being at least 50 years old [
13]. Similar to bridges, wind turbines are essential civil infrastructure for developing renewable wind energy, which has continuous resources with net-zero environmental impact [
14,
15]. However, the structural maintenance and rehabilitation of wind turbines are expensive; for example, the cost of repairing and constructing a blade varies between
$30,000–200,000 USD [
16]. Therefore, the SHM of wind turbines and bridges remains an essential consideration to various infrastructure owners, consulting firms, and government agencies worldwide. These condition-based health assessments enable them to develop a timely and optimum maintenance schedule, which is economical compared to replacing expensive structures [
17].
Different failures can happen in blades, towers, and foundations of wind turbines. However, failure and damage to the blades are more common [
18,
19]. Due to limited accessibility and remote installation, very little research has been conducted to evaluate full-scale wind turbine systems [
20]. Several numerical studies [
21,
22] and small-scale laboratory experiments [
16,
23] were conducted to diagnose wind turbines at both system and component levels. For instance, eight accelerometers were put on the tower of a wind turbine to assess its behavior during the construction and service life of the turbine [
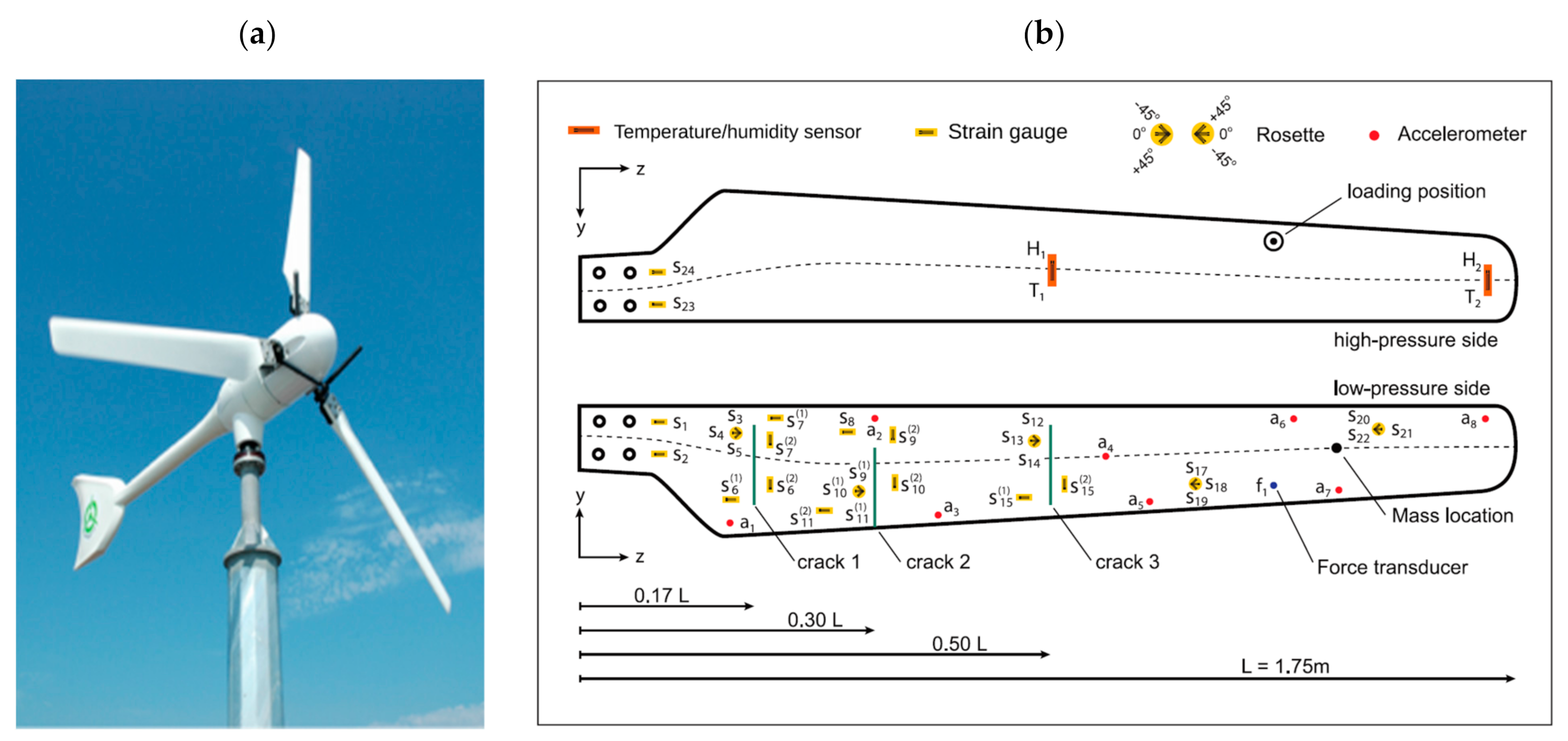
24]. Ou et al. (2021) monitored a laboratory-scale blade using accelerometers, temperature sensors, humidity sensors, and strain gauges under different operating conditions and external excitations.
Similar to wind turbines, the performance of bridges can be affected by external dynamic loads such as wind, earthquakes, and traffic loads. Moreover, environmental conditions, including temperature, humidity, and corrosive situations, can cause significant damage and cracks in different elements of bridges during their service life [
25]. Bridge damage includes cracks in concrete elements, displacement and vibration that is more than the acceptable range, connections failure, welds failure, corrosion in foundations and piles, and even failure of elements such as piers. On the other hand, as bridges are more slender than other civil structures, they experience a higher range of vibration due to ambient and man-made excitations, making them more susceptible to damage [
26]. A lot of research focused on vibration-based bridge health monitoring methods to assess the safety of these structures [
27,
28]. However, optimal sensor placement, limited availability of sensors, inaccessibility, and measurement noise pose several challenges in this field, which has caught significant attention in recent years [
29,
30]. This emphasizes the need for an increasing number of real-life validations of the infrastructure monitoring technology and damage detection techniques.
Structural damage results in changes in the modal properties of the structure, such as natural frequencies, damping ratios, and mode shapes [
31,
32]. Although modal identification techniques rely on measurements, such as strain, displacement and acceleration, monitoring and obtaining these measurements from full-scale structures still poses significant challenges [
33]. Moreover, the measured data are often noisy, which affects the accuracy of modal identification [
34]. There has been significant development of various modal identification methods that can resolve the SHM challenges of bridge and wind turbines using time-domain (TD), frequency-domain (FD), and time–frequency domain (TFD) methods [
35]. The TD and FD techniques can be applied for stationary and linear signals; however, complex excitations are non-stationary in nature [
36]. Hence, the TFD methods have been developed as a new field in SHM [
37,
38]. Moreover, TFD methods are more robust and faster than other TD methods, such as Stochastic Subspace Identification (SSI) [
39]. For example, SSI requires model order selection and stabilization diagrams, which require significant user intervention [
39].
There are several TFD methods, such as Wavelet Transform [
40], Empirical Wavelet Transform, Hilbert Huang Transform [
41], Empirical Mode Decomposition (EMD) [
42,
43], and Time-Varying Filtering Empirical Mode Decomposition (TVF-EMD) [
44]. Unlike Wavelet Transform methods, EMD is one of the popular SHM techniques as it is free of any basis function and undertakes decomposition based on a local characteristic of the data of a single-channel measurement. Mixed multicomponent signals can be decomposed by the EMD method into Intrinsic Mode Functions (IMFs). TVF-EMD is one of the variants of EMD, which is free of mode-mixing [
45]. Blind Source Separation (BSS) [
46] and Second-Order Blind Identification (SOBI) [
47,
48], which are TD methods, can recover individual modal response components from the measurements. Unlike other modal identification methods such as SSI, SOBI or TVF-EMD does not require user-intensive steps, including stabilization diagrams and model order selection. Both SOBI and TVF-EMD methods have been used in the literature to assess laboratory-scale models of buildings, bridges, and a few small-scale full-scale structures [
47,
49]. However, more studies are necessary for the identification of closely-spaced frequencies of a wide range of large structures. Therefore, in this paper, both of these output-only modal identification methods (i.e., TVF-EMD and SOBI) have been implemented into two full-scale structures, including a bridge and wind turbine, with a broad range of frequency characteristics.
There are several technical challenges to monitoring full-scale structures, which makes the procedure expensive and time-consuming. Due to accessibility issues and harsh environments, the physical instrumentation of these structures remains unsafe and costly. For example, monitoring wind turbines needs reliable wireless sensors for freezing temperatures and special data acquisition systems [
19,
33]. Some non-destructive techniques, such as infrared thermography, were introduced for SHM to overcome accessing problems [
50]. However, these methods are not reliable for monitoring all structures, especially in harsh environments, as they are dependent on environmental conditions such as low temperatures [
19]. On the other hand, to monitor full-scale structures requires using numerous and various equipment for a long period of time to obtain comprehensive data. For example, Queensferry bridge was monitored using nearly 2000 different types of sensors for 3 years [
51]. Moreover, five long-span, cable-supported bridges in Hong Kong, including Tsing Ma, Kap Shui Mun, Ting Kau, Western Corridor, and Stonecutters, were monitored by ~1700 sensors for each bridge. Therefore, another challenge in monitoring these huge structures is designing a complicated SHM system, a detailed sensing network, and an instrumentation strategy to acquire and collect the required data continuously [
33]. Hence, a lot of research has been undertaken on the placement of sensors to optimize the measurement and monitoring strategy to estimate the valuable and critical dynamic properties of the structures [
6,
29].
The development of monitoring systems and sensors causes an tremendous increase in measuring data [
19]. Although collecting more and more data is beneficial for comprehensive condition-based health assessments and confident decision-making, it results in the “big data” problem in SHM. The big data problem can be defined by three aspects, including volume, velocity, and variety. Regarding the volume characteristic, the most significant technical challenges remain the collection, transmission, and analysis of the data. Therefore, a new field of research regarding the value of information and information analysis in Civil Engineering has been developed. These studies aim to develop approaches for reliable and low-cost sensor placement and health monitoring of the structures [
52,
53,
54]. In addition, the big data problem refers to the complexity (velocity and variety aspects) of datasets, which needs a new generation of data-processing equipment for coding, analyzing, visualizing, and filtering the data. Moreover, a considerable level of noise inevitably will exist in field measurements due to environmental conditions that affect the accuracy of SHM. Hence, high-accuracy filtering systems and equipment with a low-level of error are necessary [
19]. Several researchers focus more on noise effects and lots of filters to minimize the effects of noise [
55,
56].
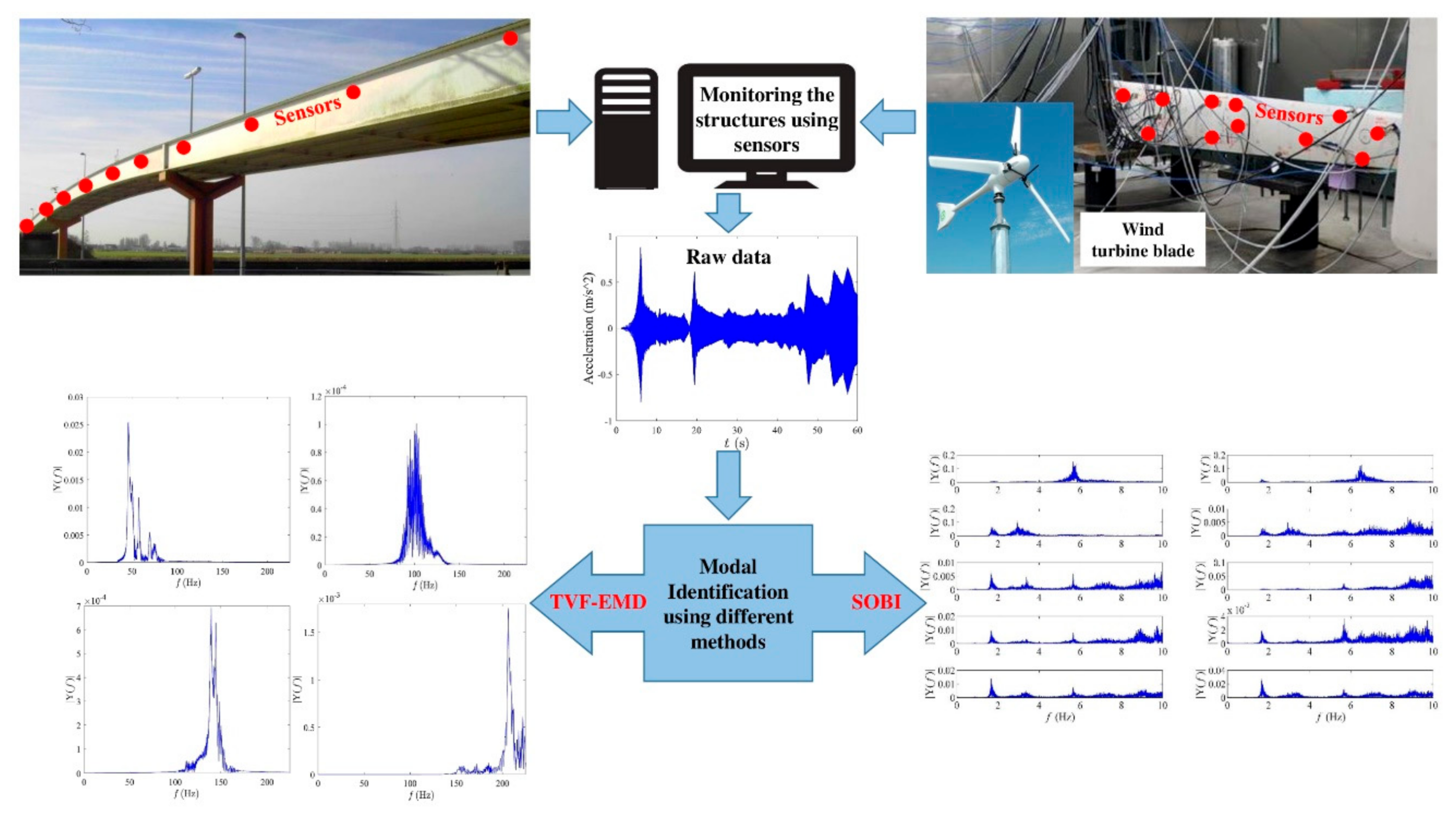
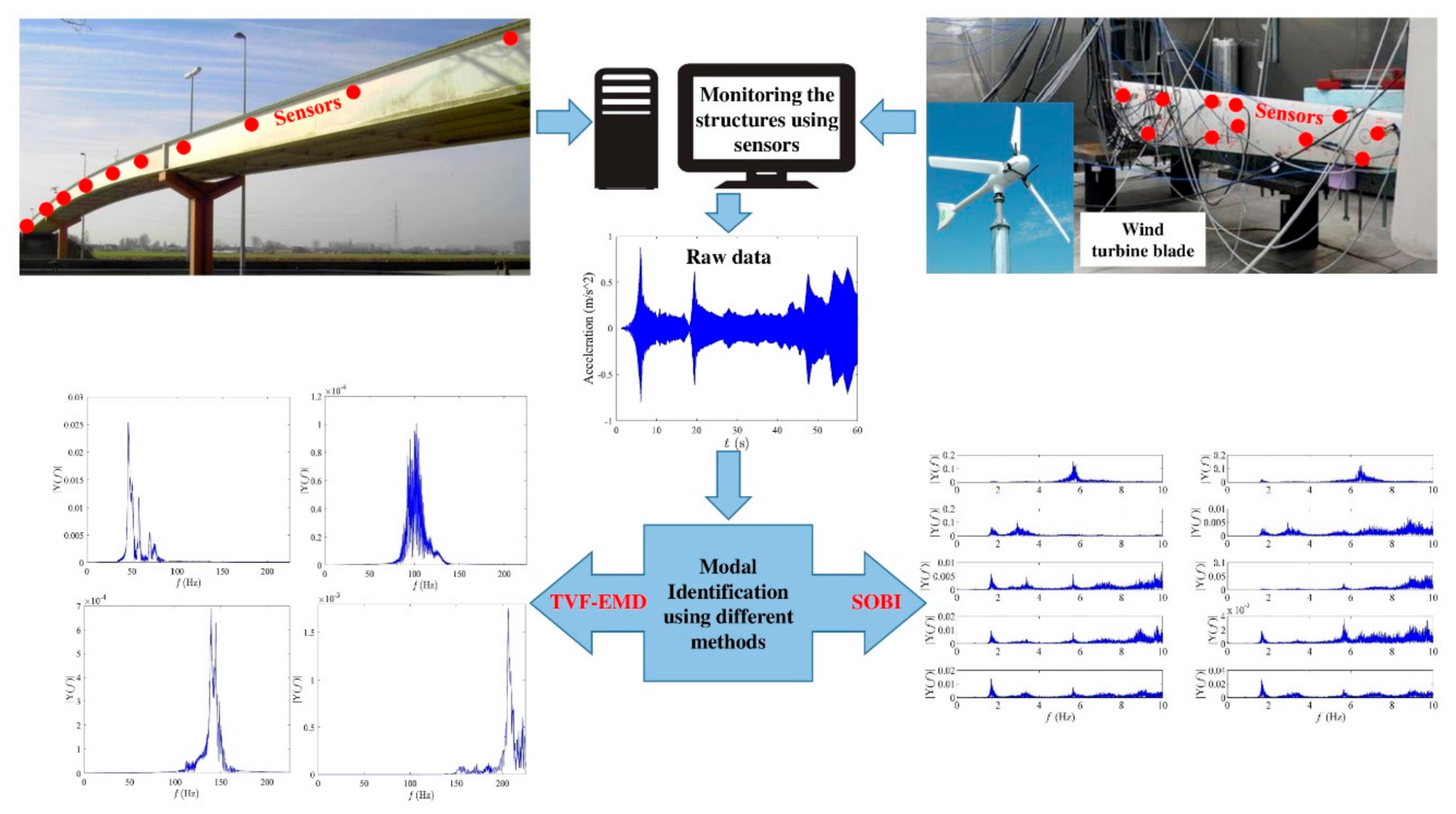
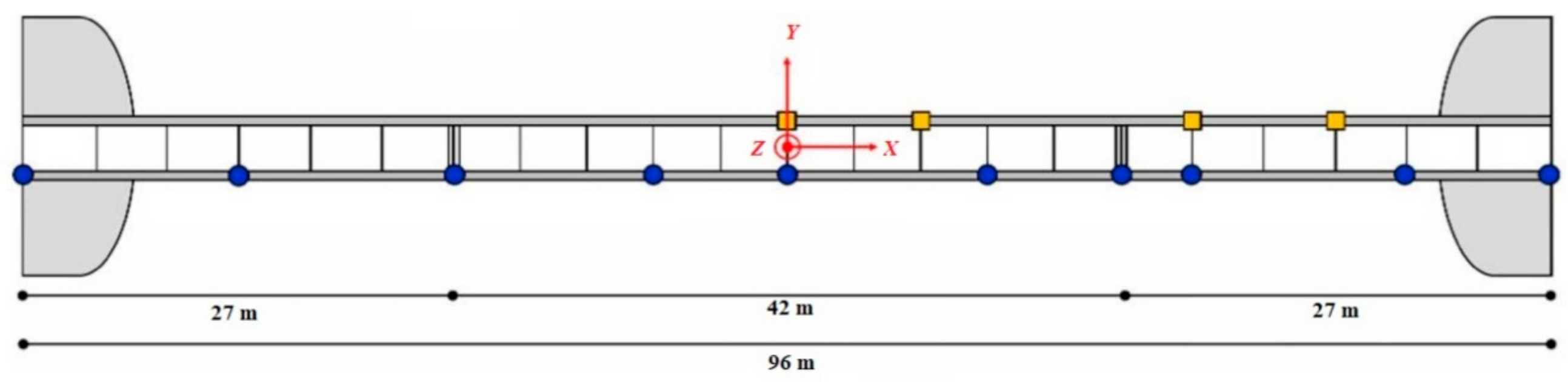
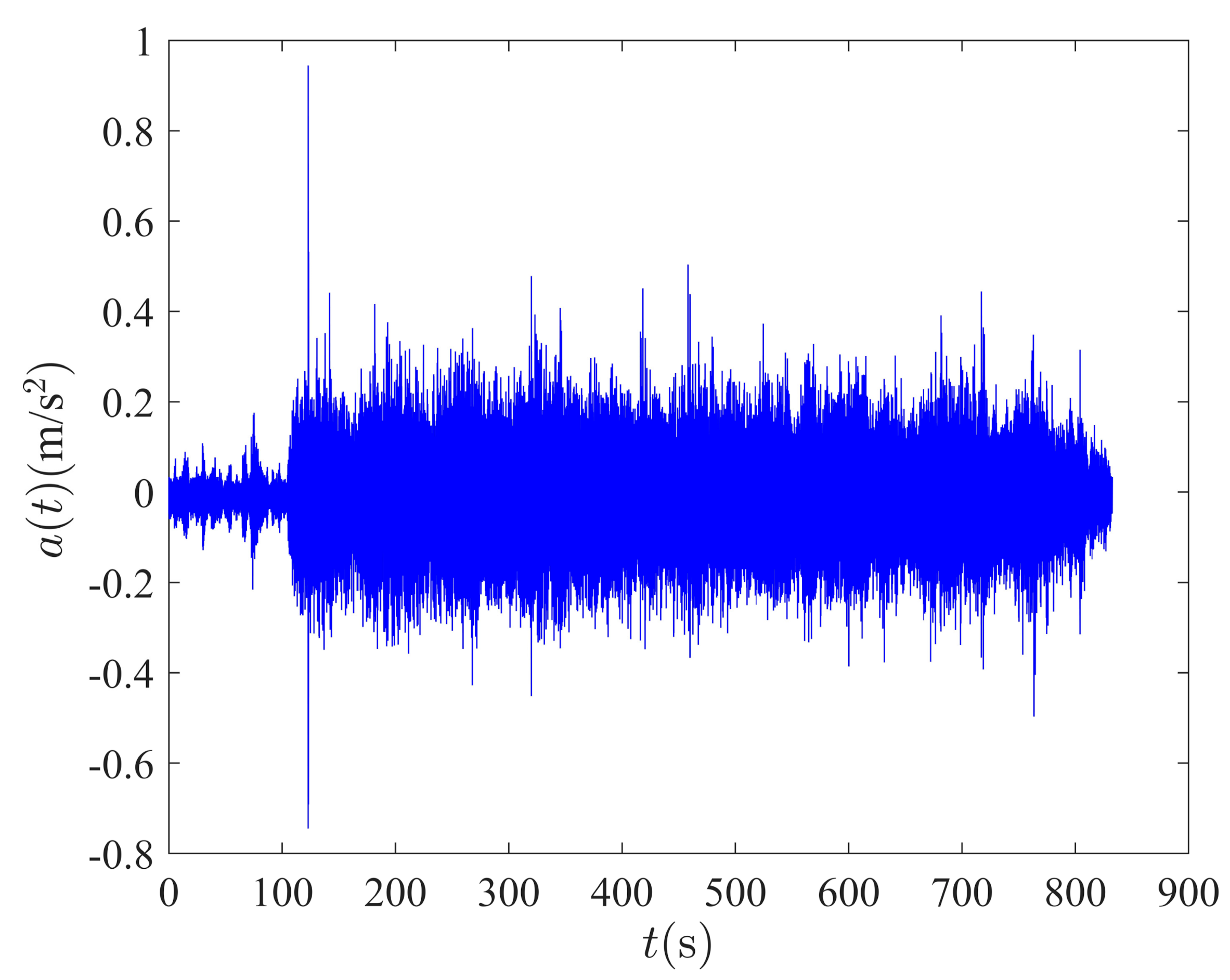
There are limited full-scale studies to demonstrate the performance of TVF-EMD and SOBI and compare their relative merits in real-life applications. Considering the abovementioned challenges of blind modal identification, this paper explores two full-scale structures, including a footbridge [
57] and a wind turbine blade [
58], as two valuable case studies to validate and compare the accuracy of a TD and TFD method. Therefore, this paper results in a better understanding of the performance and accuracy of these modal identification methods using two full-scale case studies. The paper is organized as follows. The modal identification methods are discussed in
Section 2, and the case study structures are explained in
Section 3. The results of the structural condition assessments are presented in
Section 4, followed by key conclusions in
Section 5.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}