1. Introduction
“Maximum operating speed of vehicles” and “Safety level” are two parameters whose values have increased over time due to a concomitant reduced amount of road pavement. With such conditions, the rising number of circulating vehicles has caused more frequent road pavement deteriorations than expected from scheduled maintenance. Road pavements are generally manufactured products made of heavy materials whose construction requires high costs because of heavy vehicles, skilled workers, required storage, and material movement [
1].
These aspects are also complicit in a significant increase in pollution caused by emissions during the transportation and production phase. Therefore, the objective that industries and universities have pursued is adopting new materials that bring advantages from an energetic and operational/qualitative point of view (mechanical properties, maintenance), aiming to make road pavements a means of energy accumulation. Ultimately, the subject of roadway infrastructures does not refer exclusively to the artifact itself [
2].
In the present day, SRE (Smart Road Environment) is the most widespread design concept; it refers to a context where the mere road pavement and physical infrastructure do not represent the main elements that allow vehicle operation [
3]. However, efficient and safe vehicle operation results from a series of processes related to technological devices able to communicate with each other. Such a significant change is mainly due to the improvement of technological devices that vehicles are equipped with, and to the progress achieved in the last decade with the most crucial innovation of the automotive sector or somewhat autonomous vehicles. Forecasting that since 2050 a quantity corresponding to 70% of the global population will live in cities [
4], people in these communities will be exposed to a high number of circulating vehicles and therefore roadway infrastructures need to be upgraded with innovative devices and materials that guarantee efficient traffic management. With the installation of devices known as Intelligent Transport Systems (ITSs), the so-called “Smart Mobility” will then be implemented. Moreover, the benefits offered by such devices have already been acknowledged, considering that in countries where ITSs were introduced first (USA, Europe and Japan) and as reported by the European Commission, their application achieved 15–20% of travel time reduction and 12% less energy waste, and above all emissions decreased by 10%. In comparison, there was a 10–15% reduction in accidents and a 5–10% network capacity increase in safety and roadway capacity [
4]. Roadway infrastructure and automotive sector industries are continually evolving: let us consider, for example, that electric propulsion in autonomous and non-autonomous vehicles, which would prove to be the most suitable for the SRE, has been questioned by the advent of HFCVs (hydrogen fuel cell vehicles) with a particular focus on the eco-friendly production process of hydrogen fuel, and whose vehicles would grant a maximum driving span of about 300 miles with a refill of 4–7 min [
5]. The real main challenge remains the cooperation between local administrations and governments, considering that such a gradual change can only occur with appropriate legislation; this is anyway an excellent opportunity to enhance cooperation between the public and private sector [
6]. The following chapters analyze several aspects regarding the multidisciplinary concept of the Smart Road and its main characteristics, applications and features, listing the pros and cons. Eventually, the correlation between Smart Roads and the global spread of autonomous vehicles will be introduced.
2. Background
The worldwide diffusion of autonomous vehicles is currently attracting much attention concerning the environmental emergency, the need for clean energy, and electric vehicles’ spread. Although still on an experimental basis, the so-called “solar roadways” have already been implemented; these road pavements consist of modular photovoltaic panels capable of bearing vehicle loads, supplying electricity thanks to sun rays, and to reproducing horizontal signs through LED lights, without the need for maintenance and guaranteeing considerable flexibility in the case of construction sites or deviations. Instead, plastic was considered an innovative material for road pavements as a mechanical and operational aspect. Its application would occur through prefabricated panels, reduce construction times, recycling material, and more excellent atmospheric agents’ resistance. Despite scheduled maintenance interventions, compromises in road pavements efficiency is due to the impossibility of public administrations’ monitoring of all deterioration cases; therefore, it is not possible to intervene promptly when not aware of the problem. Hence, it was decided to take advantage of the high communication level by creating a reporting app involving users reporting damages [
4]. In
Table 1, it is possible to note the mentioned innovative applications for roadways.
Innovations that are affecting civil engineering transportation infrastructure and the automotive sector are multiple, and this is the reason why the “smart road” concept has different characteristics and applications linked to the context that is used for: monitoring, information, autonomous vehicle facilitation. Therefore, a general definition of “smart road” can be given stating that such infrastructure is a combination of roads equipped with digital devices [
5] and innovative materials that allow rapid exchange of data, both with vehicles and with service managers, to guarantee total efficiency (quality of infrastructure and service, vehicle safety). Sometimes, it is immediate and easy to think that the smart road is a concept that refers to pavements or platforms that support vehicle loads.
However, considering several devices that are not all physically connected, it is possible to assert an effective smart ecosystem or environment characterized not only by the platform or pavement. Hence, such an environment, defined as SRE (Smart Road Environment), is composed mainly of the following systems [
6]:
Real time monitoring;
Analysis and accounting of users behavior;
Journey planner;
Intelligent road lights and signals;
Parking and loading areas;
Sensors;
ITS (Intelligent Transport Systems).
With the analysis of these details, it is possible to note what SRE’s primary capabilities are concerning management and monitoring to achieve efficient decision-making in damages or accidents. These performances are achieved not only thanks to the previously mentioned elements but also through VICS (Vehicle Information and Communication Systems) installed in vehicles [
6].
3. General Technical Features
With the implementation of Smart Roads in cities, a situation equivalent to a “neural network” would eventually be created. All points of the different branches would be connected and monitored continuously. With this type of asset, the benefits would mainly involve maintenance activities by promptly identifying deterioration and traffic management by monitoring which areas are most subject to congestion phenomena.
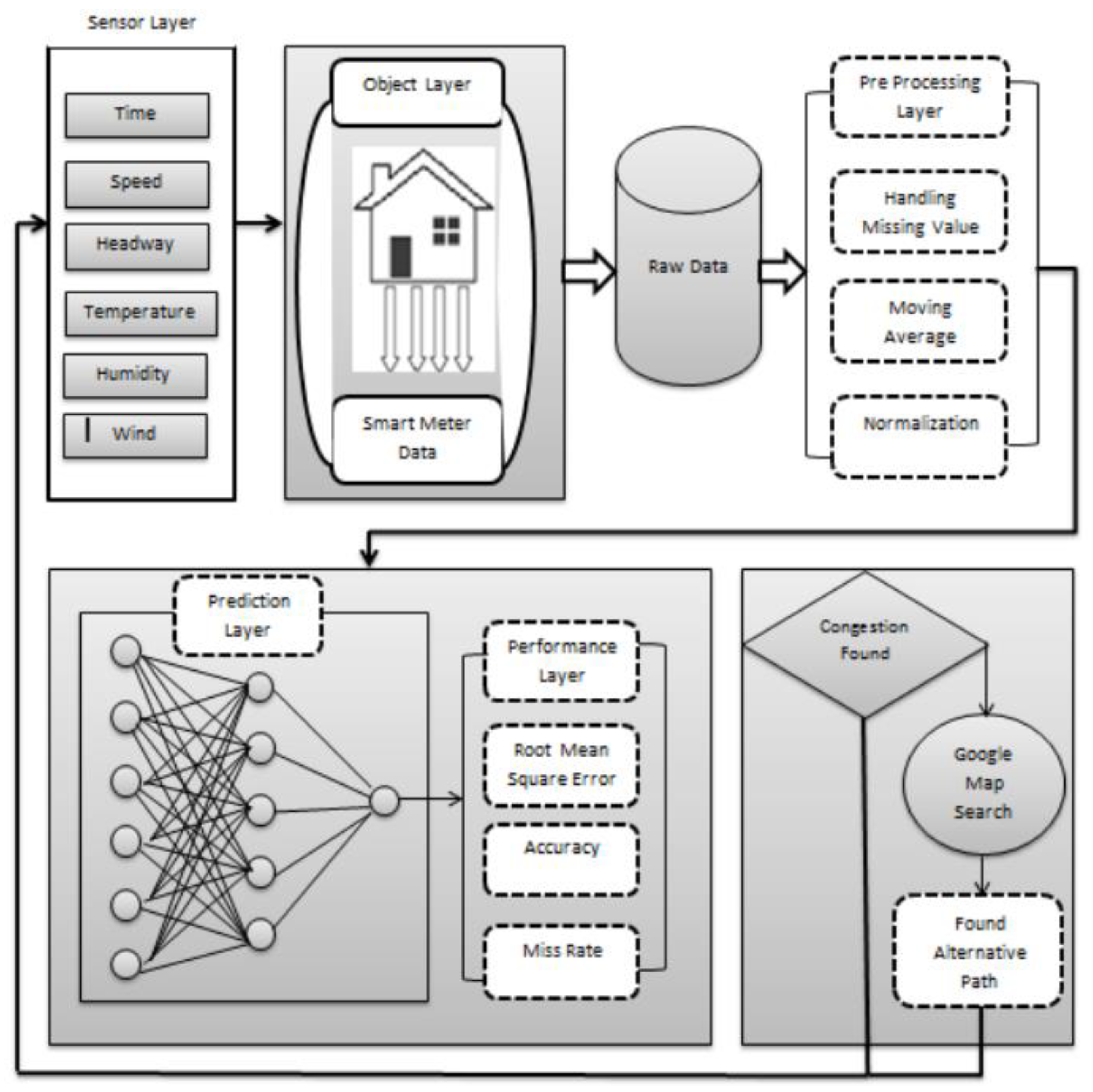
This latter issue could be managed through a dedicated approach aimed at prevention, thanks to the high quantity and quality of the “neural network” data used to develop algorithm studies to predict potentially congested areas. A machine learning case applied to traffic control is one of the MSR2C-ABPNN models (
Figure 1), where an artificial neural network has been implemented through a backpropagation algorithm.
Figure 1 summarizes the process of the MSR2C-ABPNN system for sensory layers, which contains inputs to allow the prediction and identification of an area potentially subjected to congestion. If this is identified, a communication is broadcast to the vehicles, and an alternative route is then proposed. When a congested area is identified again, the procedure is repeated.
The algorithm adopted for this procedure is of a backpropagation kind. The process is divided into two sublevels, one to detect occupancy and the other that evaluates the performance level of predictions to evaluate the error’s magnitude. The procedure was carried out in two phases: the prediction phase algorithm served to evaluate occupancy, while the performance layer was subsequently used to evaluate the prediction. A similar traffic management approach would bring cities closer to being smart cities, since the study mentioned above could help to manage the traffic signal timer automatically, making it more valid than previous models such as Pushpi and Dilip Kumar, 2018 or Tamimi and Zahoor, 2010 [
7].
Nowadays, in a period where renewable energy research is the fundamental theme of any innovation, the concept of roads as a means of energy source is significant. The most common idea for this is associated with using solar panels; however, there are other techniques such as “battery-roads” (
Figure 2). The application of solar panels is characterized by an artifact composed of three layers. The most exposed layer has the function of bearing the capacity of vehicle load. In the middle layer, solar panels and electronic devices are located, and in the deepest layer, all instruments and devices allow energy provision and transfer.
Despite several advantages in energy cost savings for operational aspects, constructing this road is quite expensive. For example, if a solar road with a given surface would cost between 7 to 10 thousand dollars, the same road would cost just 250 dollars if done in common asphalt. The second application consists of catching kinetic energy from car wheels through devices characterized by a certain roughness, installed on road pavements. This system could provide 100,000 kW of electricity per year, equivalent to burning 19 tons of oil [
8].
What ensures the high technological level of smart roads is the presence of various sensor types that cooperate all together, and that must be protected from the upper layer of the artifact to guarantee a good performance, which in conclusion are mainly used to monitor the road itself. One of the protection techniques is the Distributed Acoustic Sensing (DAS), which allows a non-intrusive way to turn optic fibers into vibration sensors. This technology can evaluate acoustic signals, identifying the event type and damage level [
9].
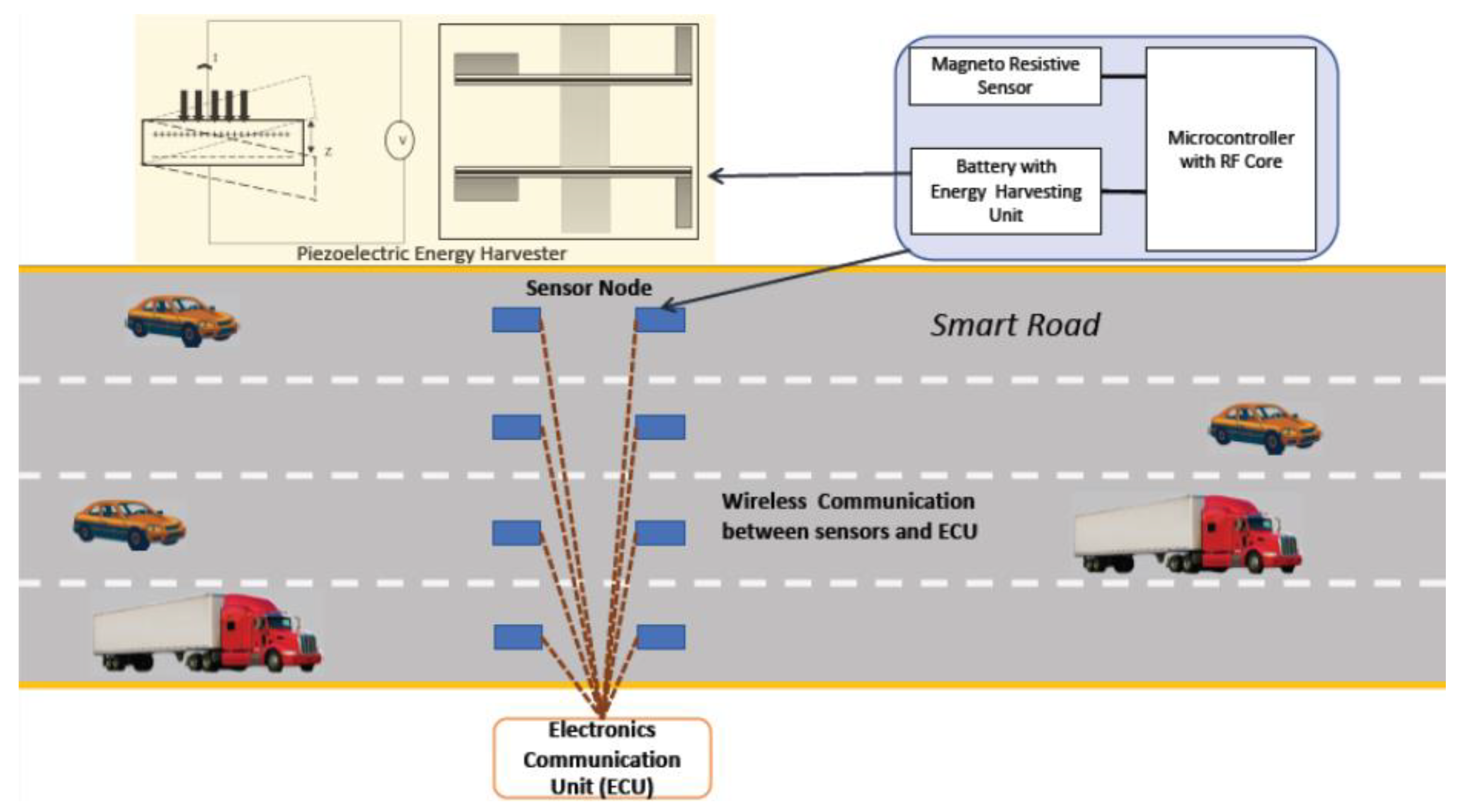
Induced vibrations from dynamic vehicle loads mainly cause damage to the road infrastructure. This problem cannot be entirely avoided. However, these vibrations can provide some advantages instead. Vibrations are produced by vehicle pressure and are caused by vehicles’ kinetic energy in motion, proportionately. As previously stated, the smart road concept is related to energy sources. Ultimately, vibrations represent an energy transfer, and considering that induced vibrations from vehicles are characterized by a frequency of 4–80 Hz, they could be a positive element in smart roads with energy harvesting systems installed to generate electricity. The conversion of mechanical energy (vibrations) into electrical energy exploits the induced mechanical stress and the piezoelectric effect.
This type of energy harvesting system is composed of two phases. In the first phase, vehicle vibration is converted into mechanical energy. In the second phase, electrical power is obtained from mechanical energy in a piezoelectric way. Still, such a part can also be carried out through electromagnetic or electrostatic methods. Several projects about vibration-sourced harvesters characterized, for example, by two lead zirconate titanate bimorphs, were designed to capture vibrations while amplifying stresses to obtain more power silicone rubbers. This type of artifact was thought to exploit both high- and low-intensity vibrations, and with such a design, it is possible to achieve a maximum power of 57 mW, enough to activate and operate wireless devices and sensors on smart roads [
10], therefore it is possible to observe an application scheme in
Figure 3.
Exploiting vibrations induced by vehicles on pavements as a damage signal or a source of energy can eventually be useful. Still, it is necessary to keep in mind that vibrations are among the leading causes of road deterioration, so the use of piezoelectric-based harvesting systems is questionable.
Speaking of piezoelectric materials, another aspect that needs to be mentioned is the vehicle wandering phenomena, which consists of a wheel randomness path that depends on trailer alignment, driving habit, and atmospheric agents like wind action on vehicle trajectory. This phenomenon is mainly affected by the thickness of the pavement: it is estimated to be more dangerous for thinner pavements, so its role within the pavement lifecycle is essential. Some studies showed that vehicle wandering affects the rutting life of asphalt concrete pavements more than fatigue cracking [
11]. Database information on a smart road cannot exclude infrastructure and pavement health monitoring.
The detection of how vibrations propagate represents a helpful factor in understanding deterioration signals. Usually, the monitoring of platforms and interventions requires a long time, and the involved processes like damage detection and identification cannot be carried out simultaneously. Hence, several studies currently aim to find optimal solutions to solve these issues.
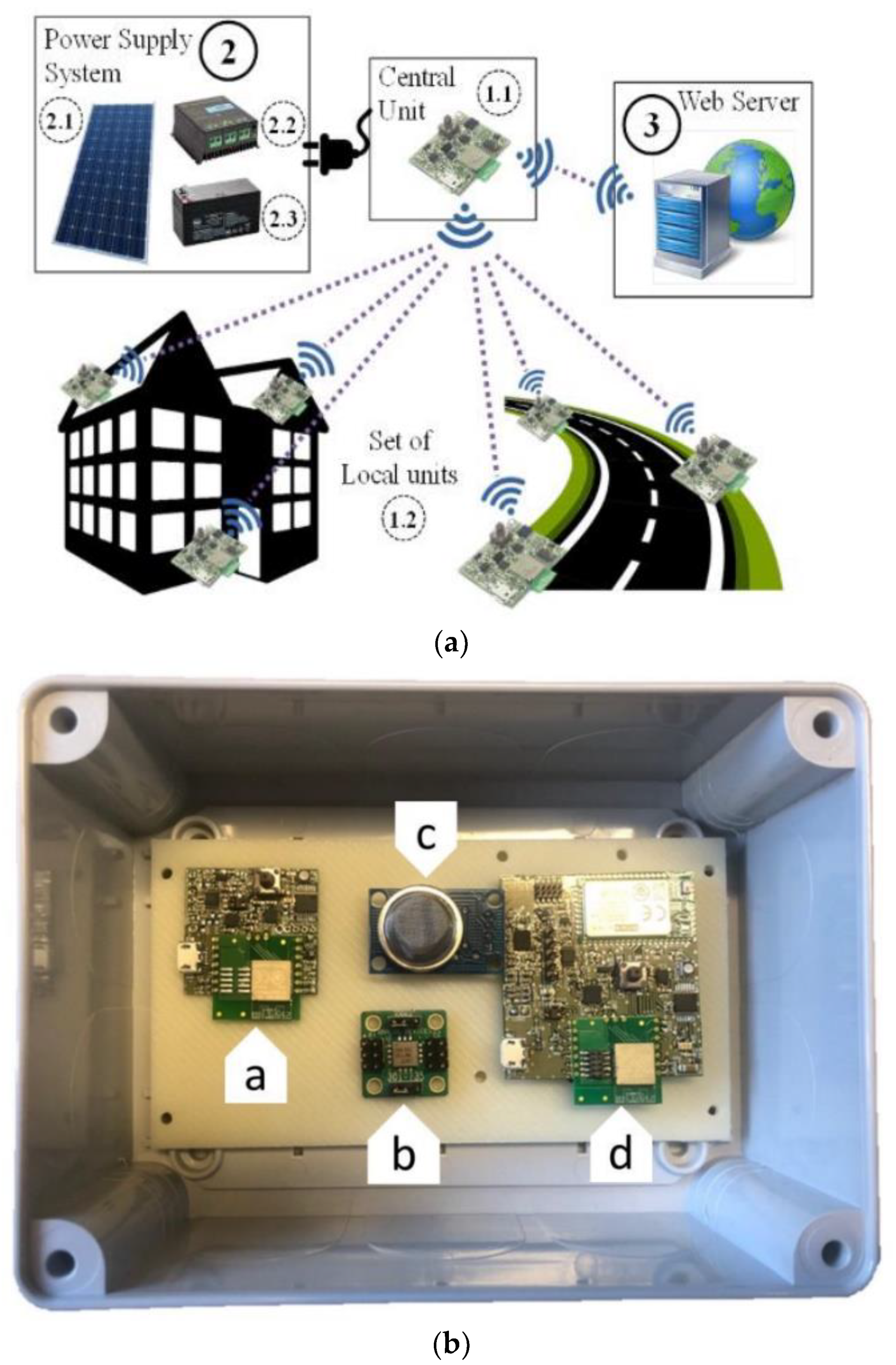
For instance, in the SICURVIA research project, a wirelessly connected platform was implemented as a multifunctional tool for supervision or diagnostics (
Figure 4), but that mainly allowed the detection of damage and helped locate them at the same time. This platform works through algorithms exploiting vibro-acoustic signals detected by accelerometers and microphones installed on it. Finally, simulations showed that such a platform could provide an escape route from a traffic management perspective in case of an emergency [
12].
Despite the limits coming from the large quantity of data that must be managed, an additional case study of a park in Reggio Calabria (Italy) highlights the importance that similar devices have in an SRE, not only for vehicle circulation but also for infrastructure monitoring [
13], considering that this kind of survey could guarantee relevant cost and time savings compared to test-based and destructive methods.
4. Smart Roads and Autonomous Vehicles
The spread of autonomous vehicles is one of the leading innovations in automotive and civil engineering in recent times, and such vehicles are expected to bring several benefits in terms of emissions, operational performance, and safety. The only vehicles currently available on the market are classified as level 3 of SAE, meaning that they are characterized by ADS (Automated Driving Systems), which allow autonomous maneuvers only in specific contexts, requiring human interaction anywhere else. Some of the factors that are slowing down the autonomous vehicle spread are often related to legislative aspects, but the main problem is probably the infrastructural quality level of many countries worldwide. Several tests for upper automation level vehicles have been carried out, showing that autonomous vehicles’ correct and safe operation can be achieved with intelligent systems installed within the environment where these vehicles operate. The last aspect shows how the implementation of innovative infrastructures like smart roads must be supported because it is fundamental for autonomous vehicles to establish the so-called V2I (Vehicle to Infrastructure), V2X (Vehicle to Everything), and V2V (Vehicle to Vehicle) communications. In contrast, the last type depends on single-vehicle equipment. The other two kinds are connected to the presence of smart devices on roads. To achieve such communications, roads can be equipped, for instance, with RSU (Road Side Units) devices able to communicate with vehicles and collect data to be exchanged, providing a valid quantity of parameters useful to evaluate and implement road interventions. Data collected by RSU devices (
Figure 5) can be transferred to other vehicles to help them operate in similar contexts. This service would transform an ordinary road into a smart road, establishing a connected vehicle system called CAVs (Connected Autonomous Vehicles) [
14]. Smart road implementation would allow some fundamental applications for CAVs, like vehicle location tracking in the absence of GPS signal or the detection of vibrations to predict maneuver directions, obtained with the installation of magnetometers and accelerometers [
15].
It is possible to assert that between several of the elements mentioned above, the SRE mainly affects two of them: V2I communication (so also I2V) and CAVs, where smart roads have a crucial role for their implementation.V2I communication works with a DSRC (Dedicated Short Range Communication) frequency system that allows data interchange between vehicles and infrastructure devices, which is significantly useful when drivers have to be informed about crucial real-time information like accidents or traffic congestion. Consequently, traffic management facilitation will be necessary, considering that collected SPat (Signal Phase and Timing) data systems will be better organized [
16]. The way V2I operates in smart road contexts allows us to identify three types of communication: first, one type for periodic or warning messages, such as speed limit notifications or traffic light signals and all data or information that belong to road facilities, indicated as V2RF (Vehicle To Road Facility); then, the two other types will be V2BS (Vehicle To Base Station) and V2R (Vehicle To RSU). It is essential to understand that V2I and CAVs are connected and that each of the communications mentioned above is fundamental for the operation of CAVs, with V2BS being characterized by cellular networks and representing the link between base stations and CAVs. It is mainly used for traffic information like accidents, providing overall supervision of traffic networks. In conclusion, V2R is the principal communication type for CAVs where the information exchange between vehicles and RSU (cooperating with V2R) produces a high quantity of data [
17] facilitating vehicle operation regarding environmental detection. Such a system can be enormously improved thanks to the 5G network’s advent, mainly bringing benefits to the most vulnerable users of roadways, i.e., cyclists and pedestrians. In a typical scenario where a pedestrian or cyclist decides to cross the road, proper devices positioned at the roadway borders would send an alert signal to vehicles. However, the most significant contribution from the 5G network to the SRE is the improved transmission of videos between vehicles and the infrastructure to give drivers better vision in low visibility [
18]. Safety and travel quality are not the sole SRE goals because one of the primary intentions is to reduce the time drivers spend inside vehicles, which is, on average, six weeks in a year. This goal can be achieved primarily through the use of CAVs. With CAVs operating in an SRE context, positive impacts occur in energy saving and space allocation; this is why they could participate in TOD (Transit Oriented Development) programs [
19]. A critical aspect has been treated before when describing V2R communications, and it showed that devices have to collect a high amount of data. The quantity of data generated by a single CAV is about 40 TB in eight hours [
17], but a study carried out by Intel states that they can reach 4000 TB daily. This massive amount of data is generated from the operation of CAV vehicle equipment (Lidar, radar, and sensors) [
20], with the primary operations being: high-speed internet providing, 3D maps updating, real-time broadcasting, and data uploading by sensors [
17]. Therefore, computing platforms have to be upgraded to guarantee correct management and provision. These tasks can be done with several applications, two of them being particularly worthy of interest: VMBS system and Equinox.
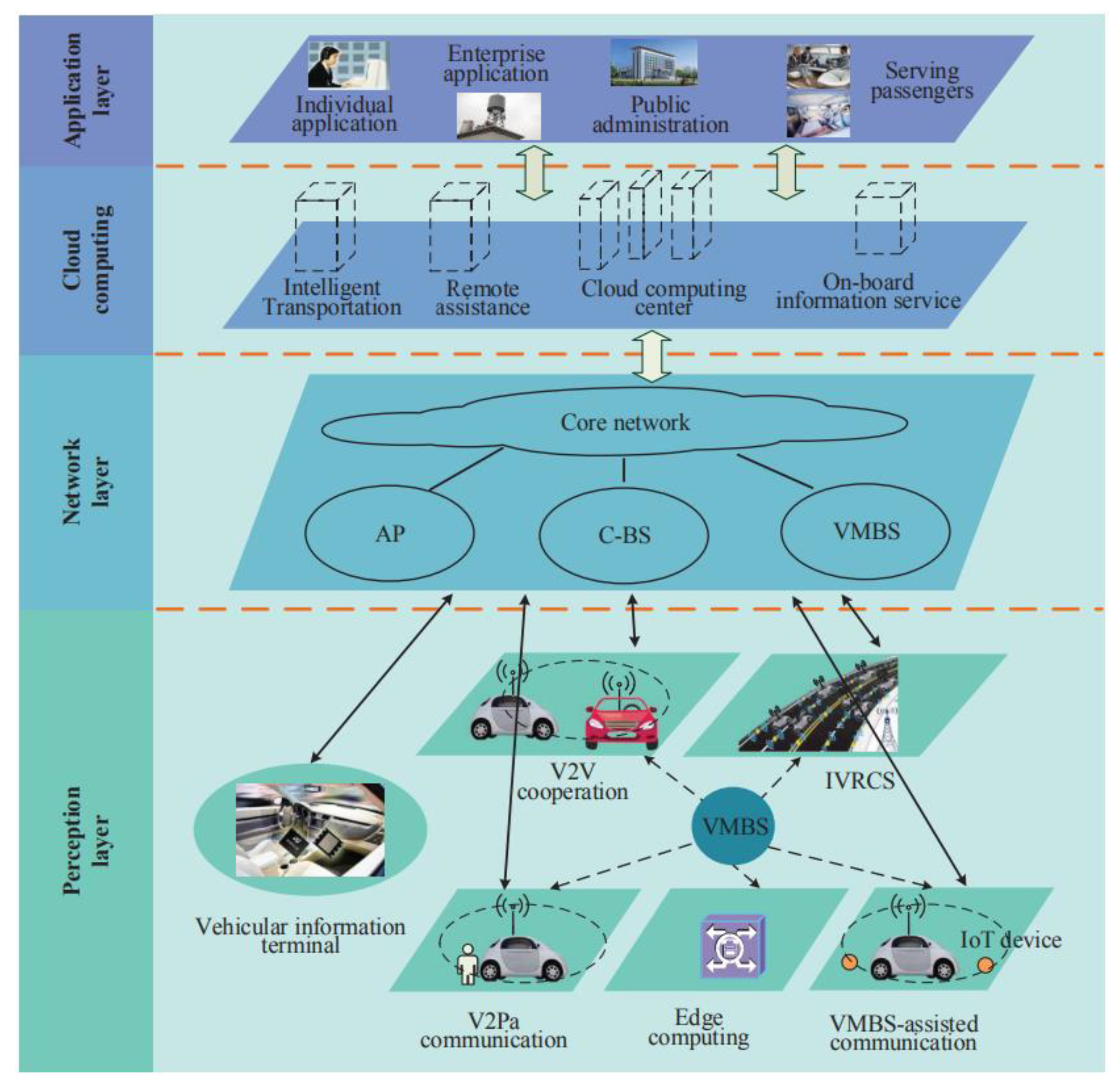
The first acronym stands for Vehicular Mobile Base Station. It allows the union between computing and communication for CAVs being installed on such vehicles; the main features of VMBS have facilitated supervision, low power transmission, and network flexibility. The fundamental characteristics of VMBS network architecture (
Figure 6), due to the presence of VMBS devices on vehicles, are V2V cooperation, improved environmental and context detection in addition to the one guaranteed by sensors based just on visual distance systems, data processes and computing speed up thanks to VMBS capability to operate as an edge computing device. Therefore, considering all these aspects, the efficient real-time connection would benefit CAVs antennas signal poorness, dynamic caching, data latency reduction, and increased transmission due to robust MIMO (Multiple Input Multiple Output) technology achievements and resource sharing [
17].
Equinox is a roadside computing edge platform composed of three layers, functional to communication, data, and computation (
Figure 7). The first one allows vehicle communication through DSRC, LTE (Long-Term Evolution), or Wi-Fi, then the data layer accumulates vehicle-generated data cooperating with RSU. Finally, the last layer is equipped with GPU, edge TPU (Tensor Process Unit), an FPGA (Field Programmable Gate Array) accelerator, and the EQUINOX platform’s goal heterogeneous computing platform are to facilitate CAV processing. The communication layer has a crucial role because for the SRE environment where V2I is the main feature for CAVs, and it is fundamental to provide an efficient and continuous communication coverage when vehicles drive at high speeds like 120 km/h and then reduced. Therefore, the EQUINOX communication layer matches DSRC, Wi-Fi, and LTE communication to implement a complementary features device [
20].
5. Discussion
It is nowadays well recognized that any progress within civil engineering cannot just focus on isolated communities’ livability without considering aspects like cost reduction and environmental impacts; it is also straightforward that innovations like Smart Roads are not exclusively related to the transport sector. Summarizing what we discussed so far in the previous chapters, Smart Roads are expected to be used for four aspects:
Innovation (facilitation of autonomous vehicles operations);
User service quality (traffic monitoring, communication, safety);
Infrastructure monitoring (damages detection);
Energy source (solar panels, piezoelectric materials).
These artifacts’ principal advantages are interoperability and centralization, i.e., the main concepts that characterize any industrial, production, construction, or projection (BIM) process. However, the main obstacle slowing down the Smart Road spread is the cost of materials and construction, and for this reason, several tests are continuously carried out to obtain cost-effective solutions.
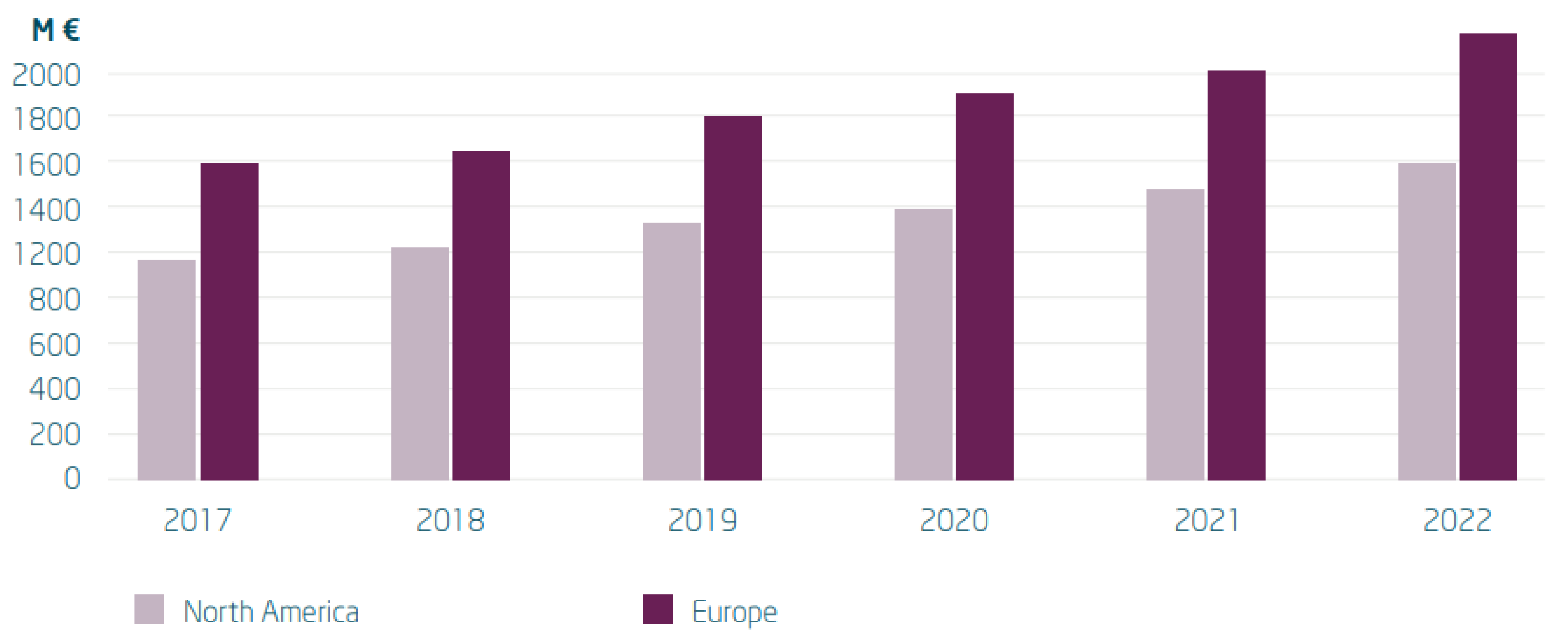
Finally, having considered several elements and devices that characterize the SRE, it is possible to state that road conversions can occur gradually with the installation of smart devices such as ITS or RSU [
21]. ITS devices are still spreading globally with positive expectations on the market for future years (
Figure 8). It is possible this way to begin with a new approach that considers data and information sharing between users and administrators, aimed to improve safety and facilitate the management process, keeping the use of current construction materials that are still economically convenient (like asphalt).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}