
Optimization and Design of a Flexible Droop Nose Leading Edge Morphing Wing Based on a Novel Black Widow Optimization (B.W.O.) Algorithm—Part II

 ,
,  , and
, and
Abstract
1. Introduction
2. Methodology
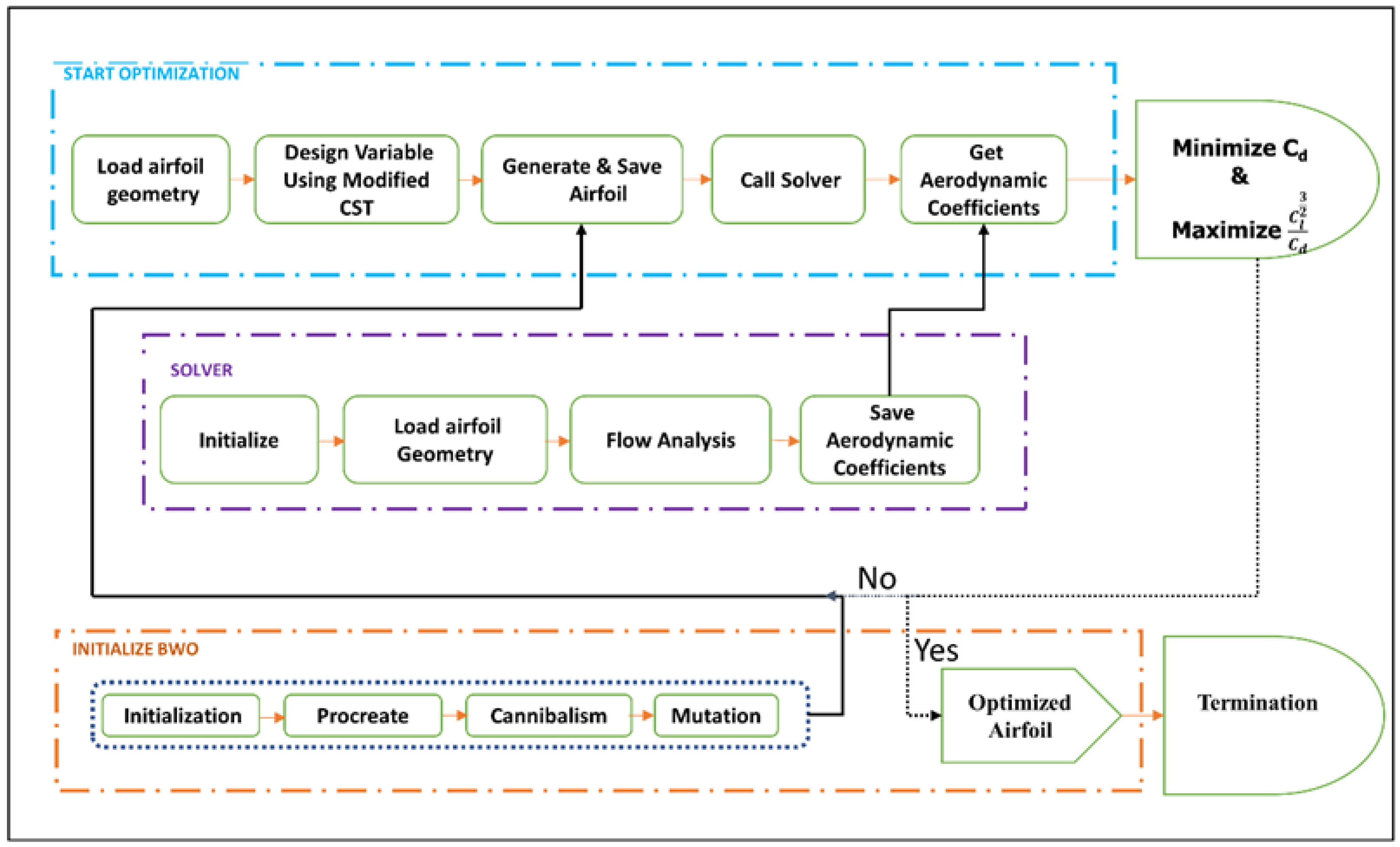
2.1. Aerodynamic Design Optimization
2.2. Numerical Approach
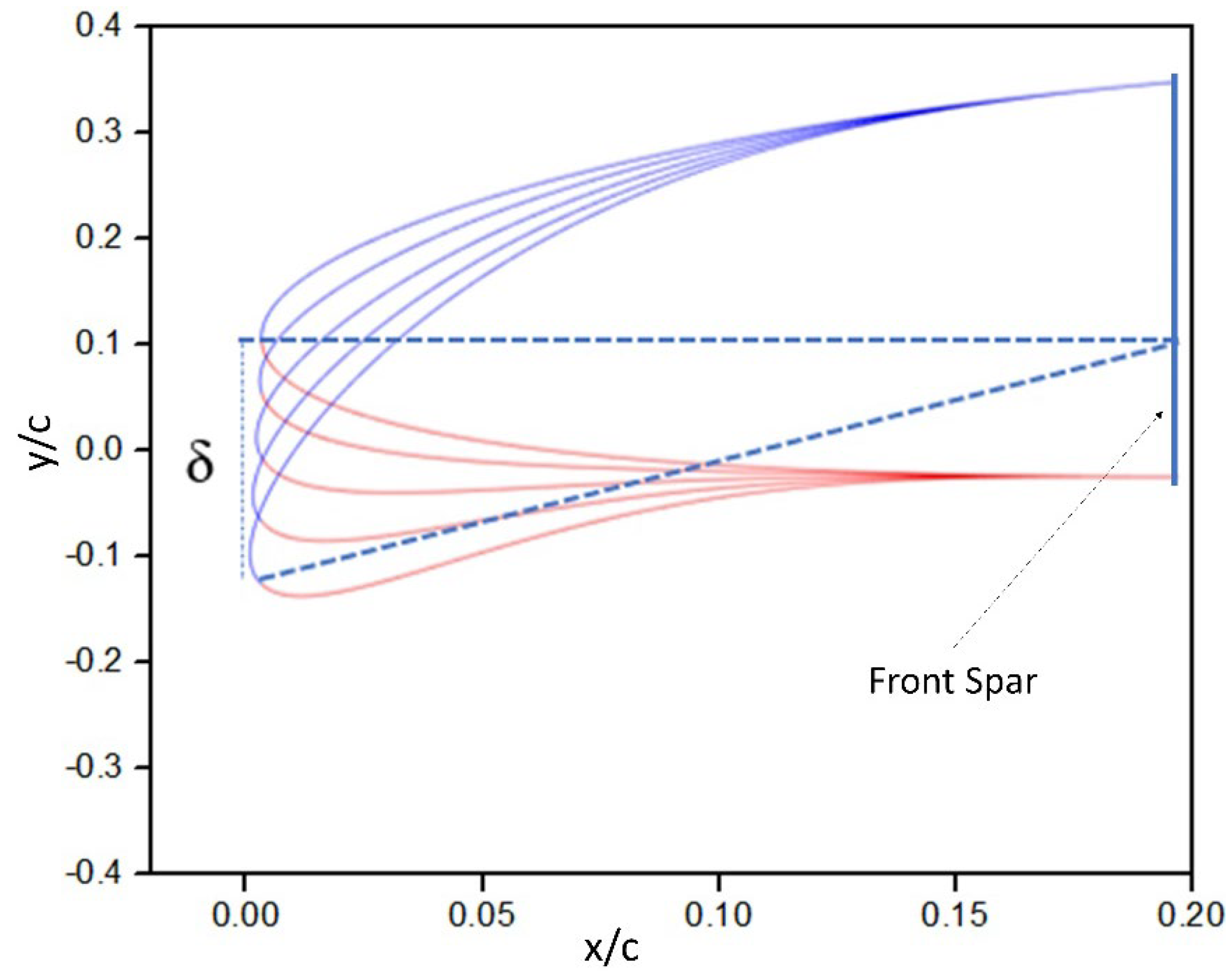
2.2.1. Morphing Model and Method
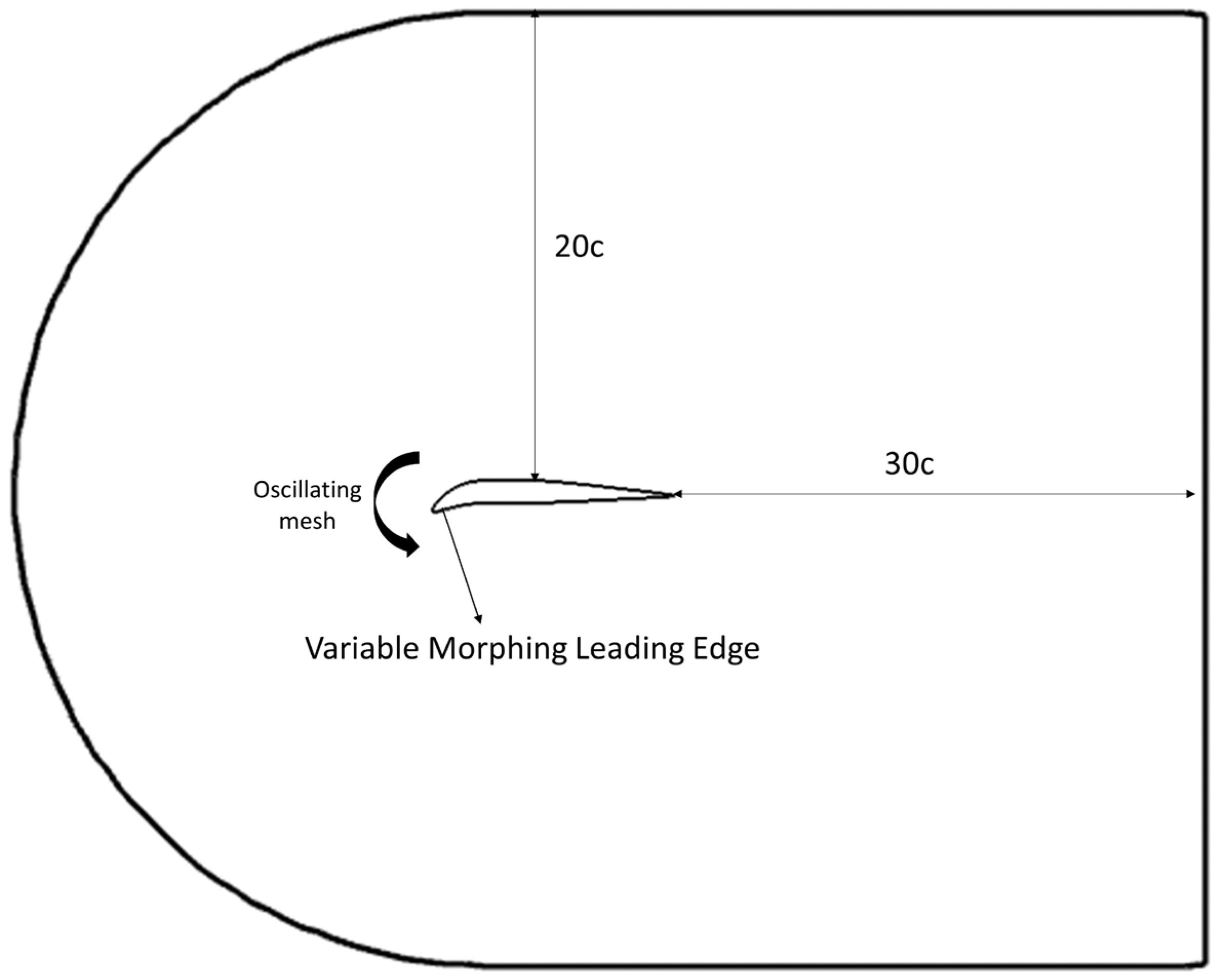
2.2.2. Computational Domain and Method
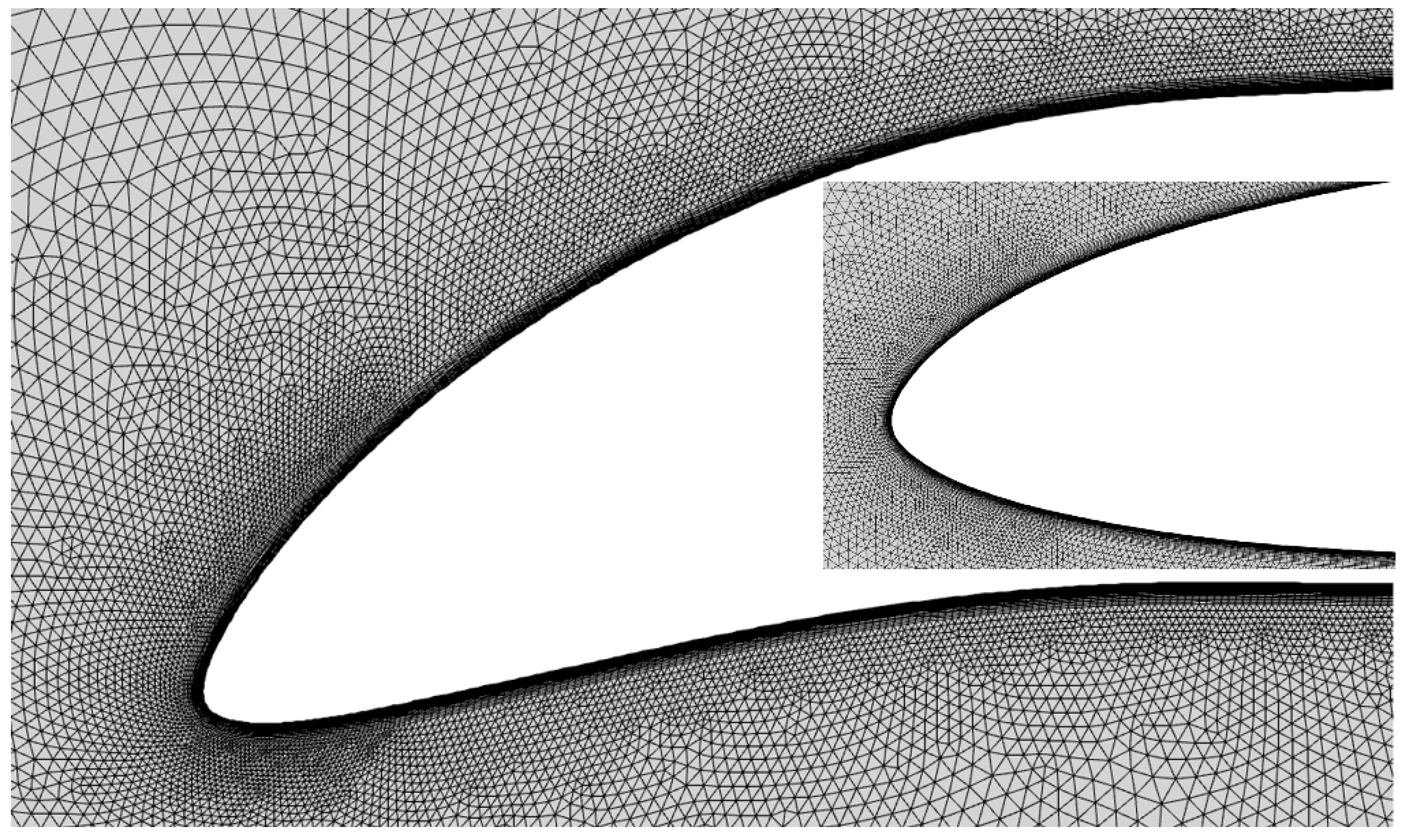
2.2.3. Dynamic Mesh Technique
3. Results and Discussion
3.1. Optimization Results
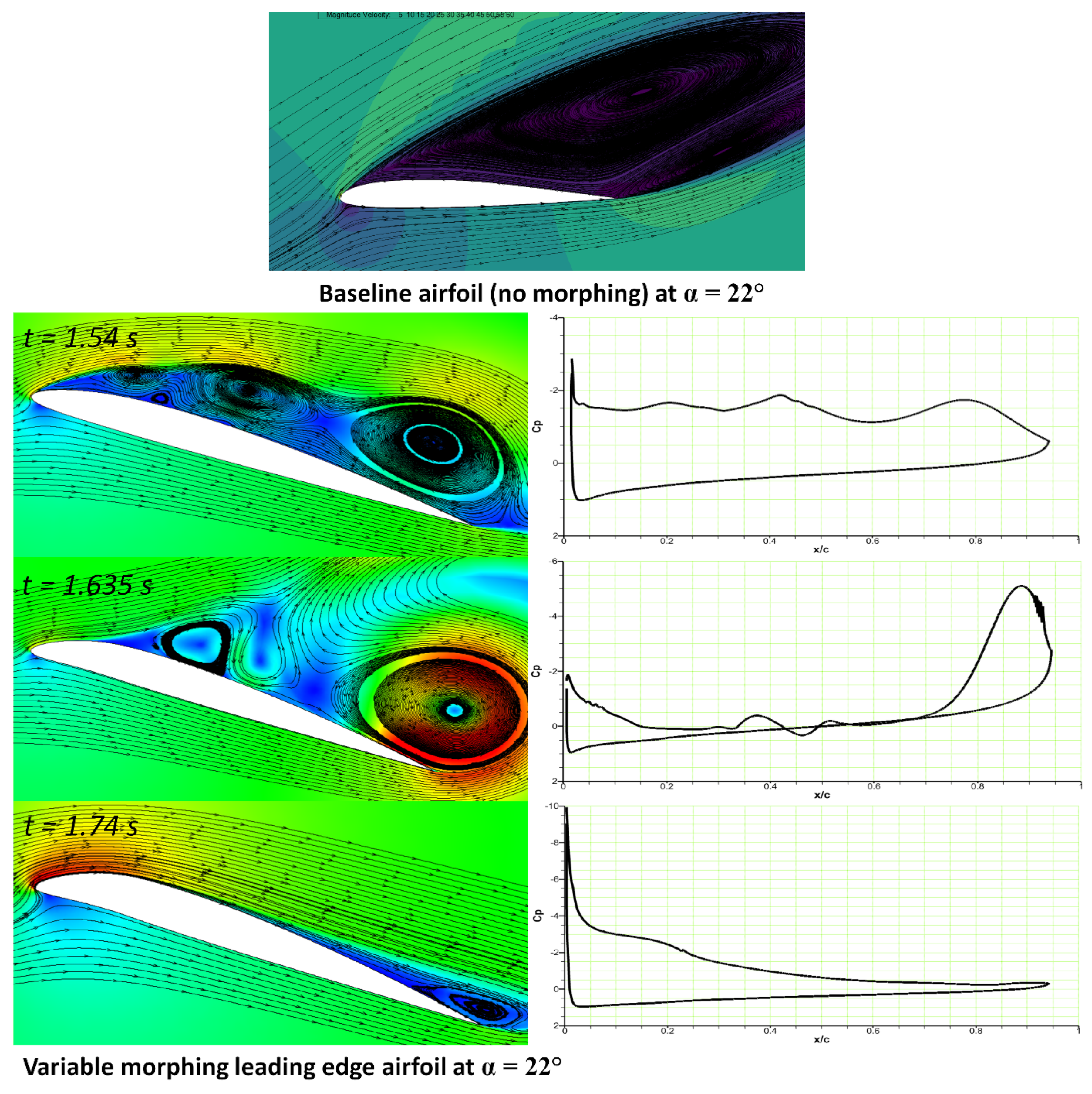
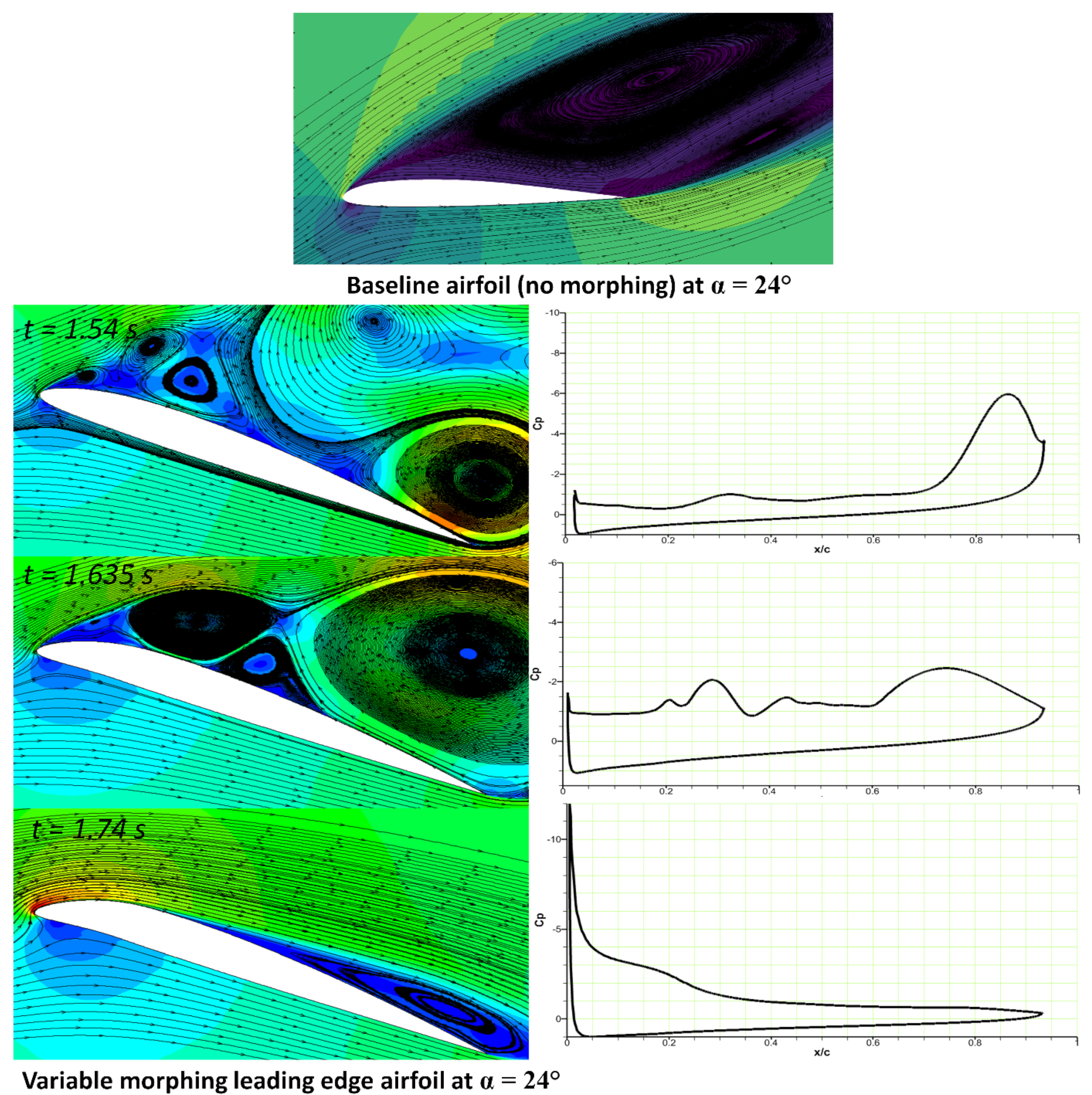
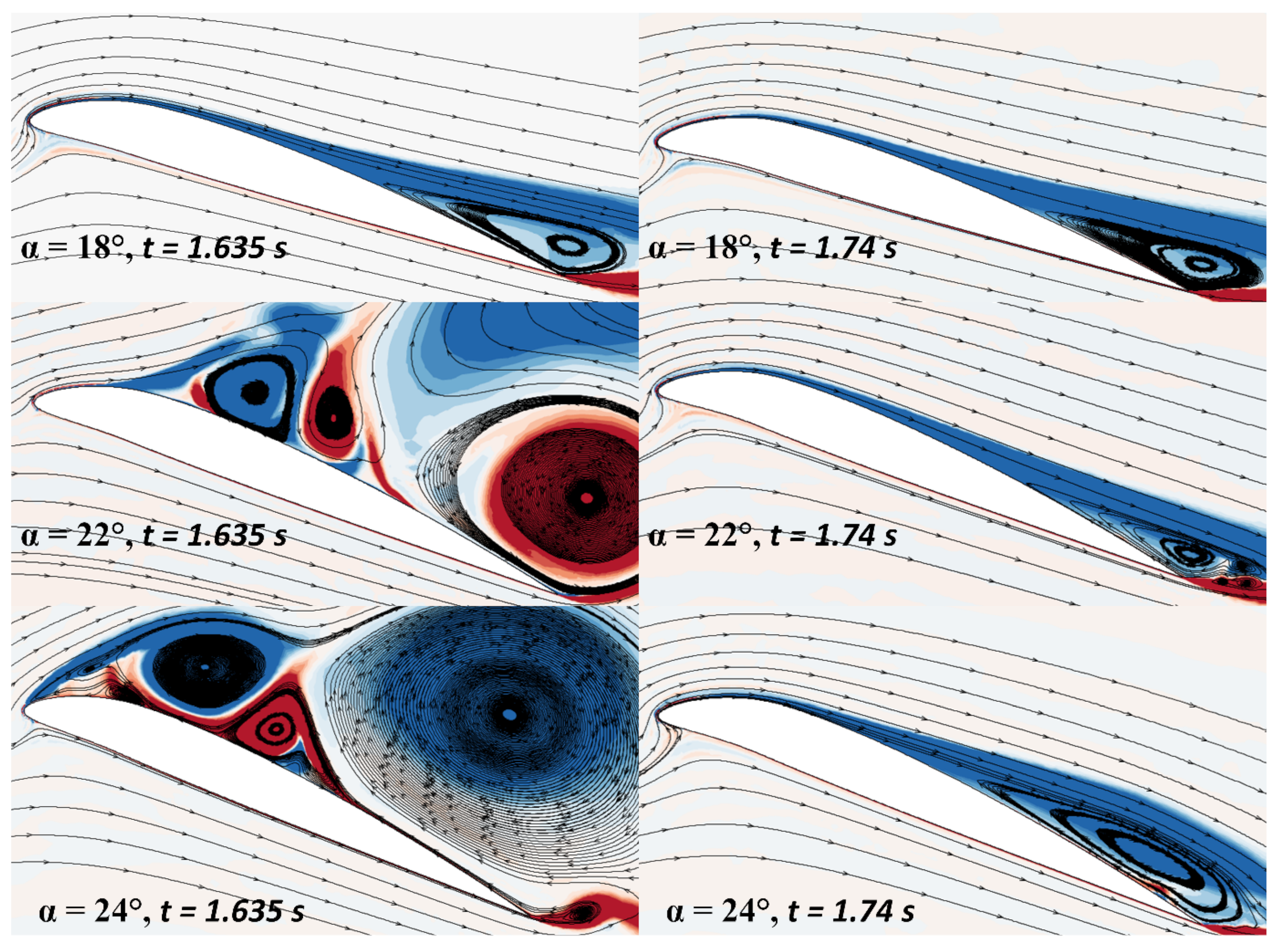
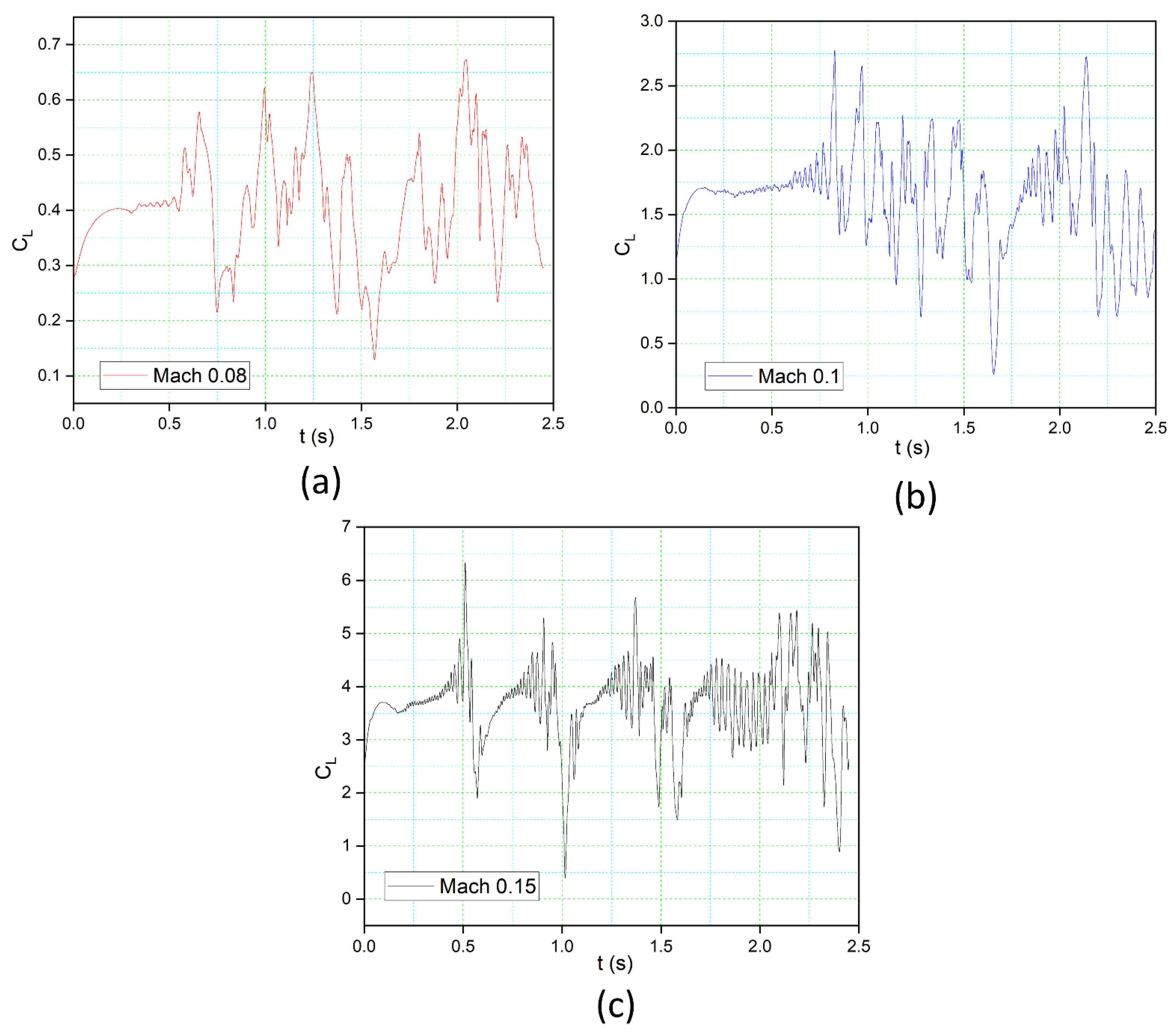
3.2. Unsteady Aerodynamic Results
Effects of Deflection on Morphing Leading Edge Aerodynamic
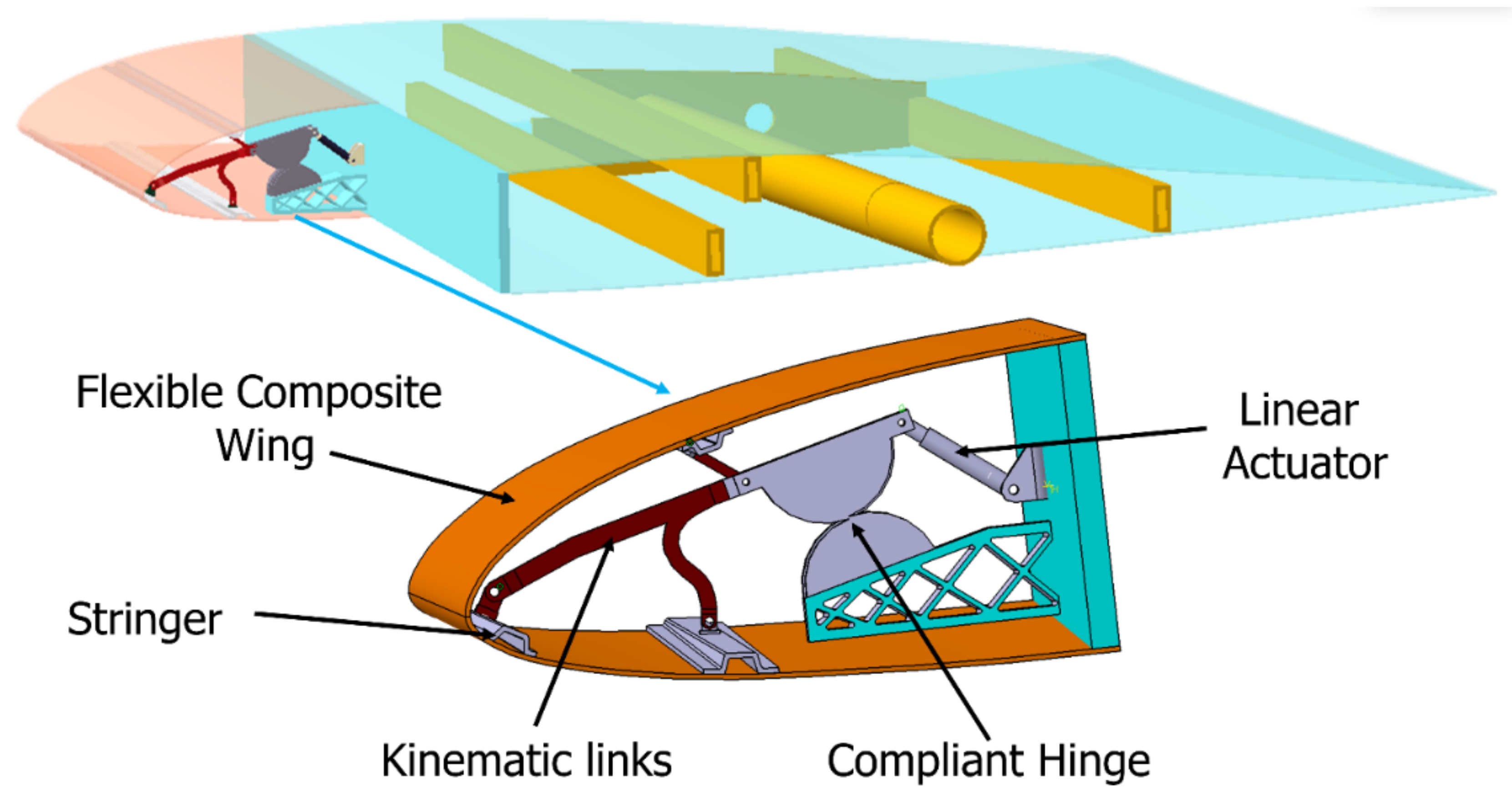
3.3. Preliminary Morphing Leading Edge Design
3.3.1. Key Material Properties
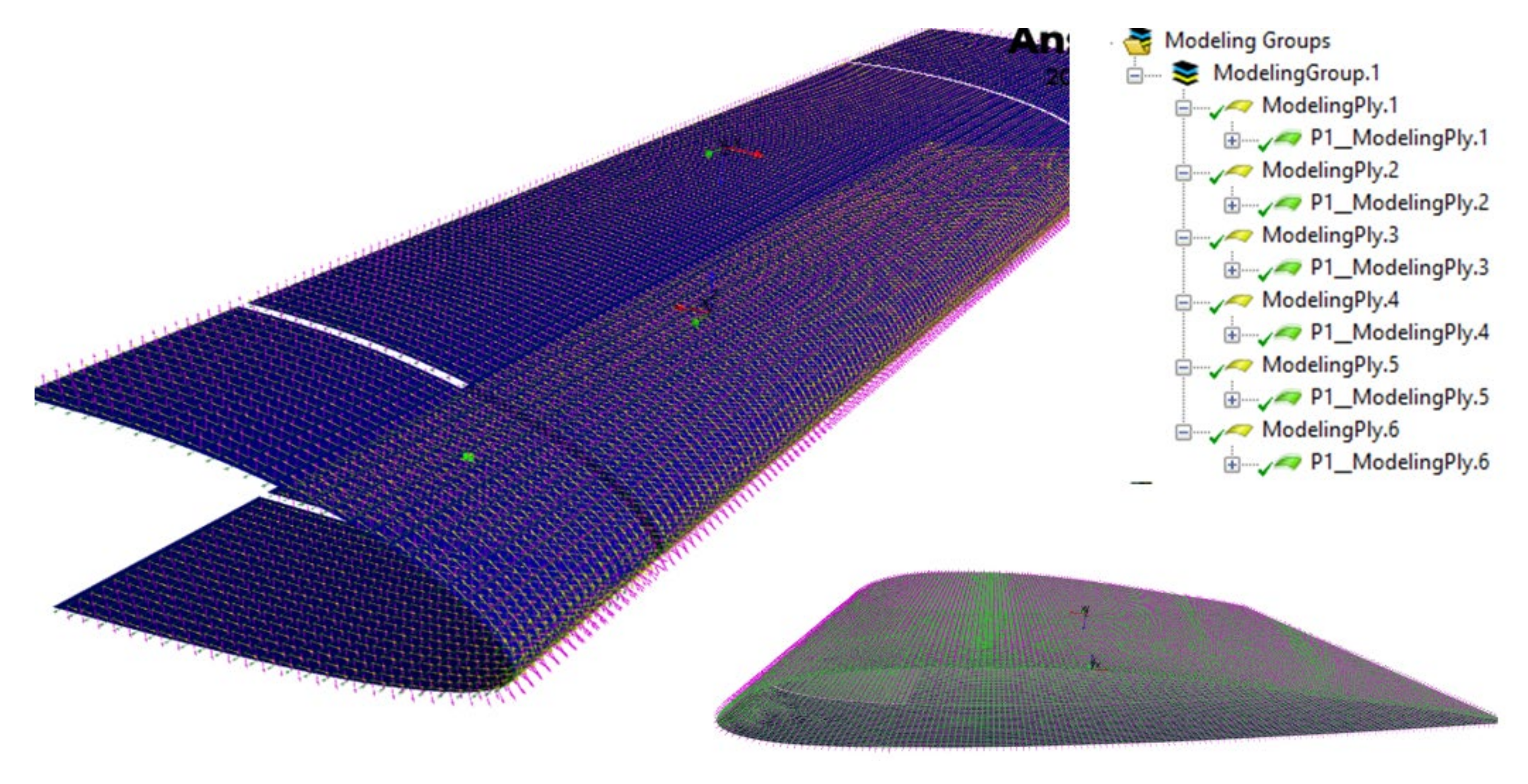
3.3.2. Composite Material Modeling
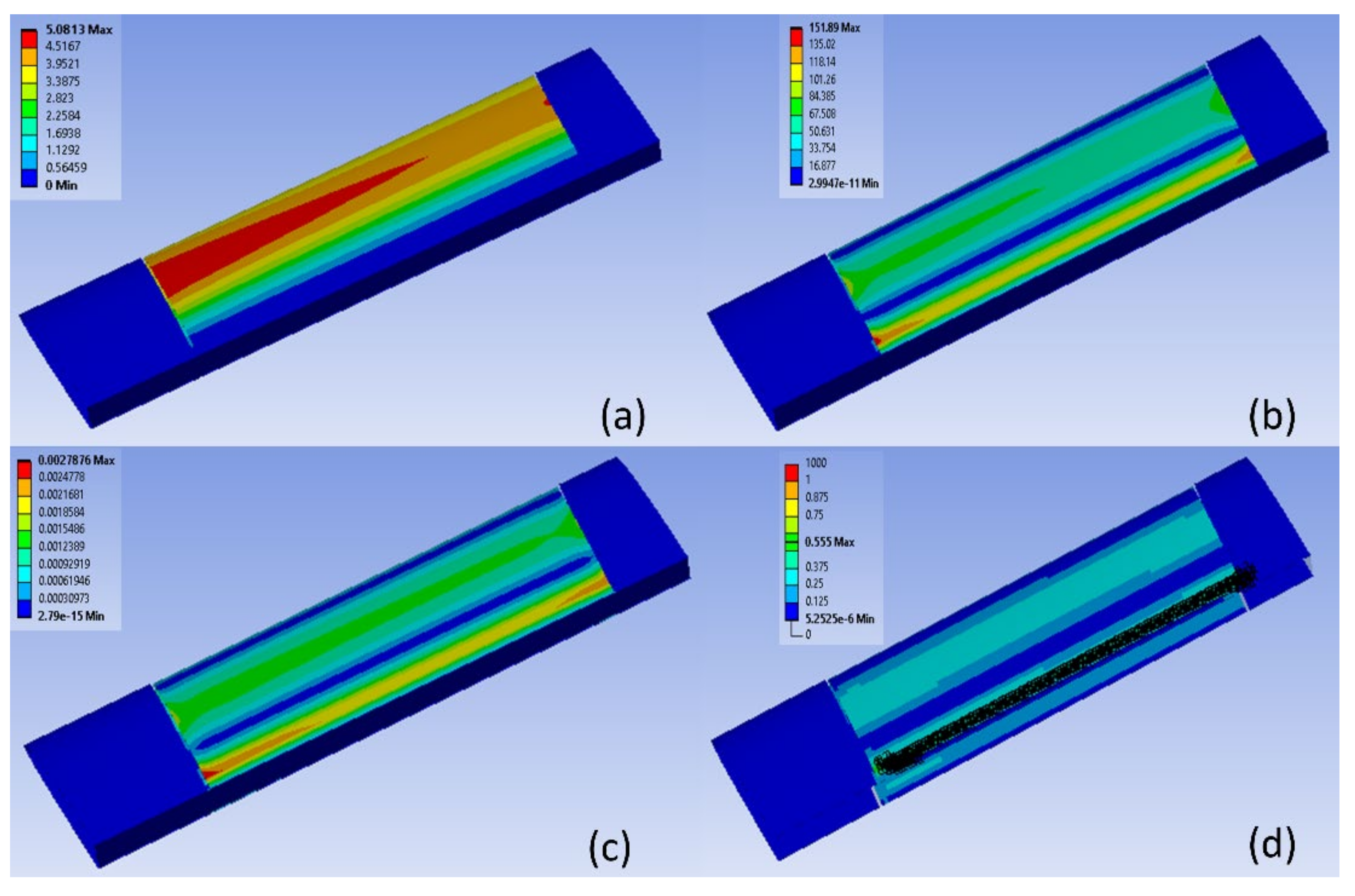
3.3.3. Static Structural Analysis
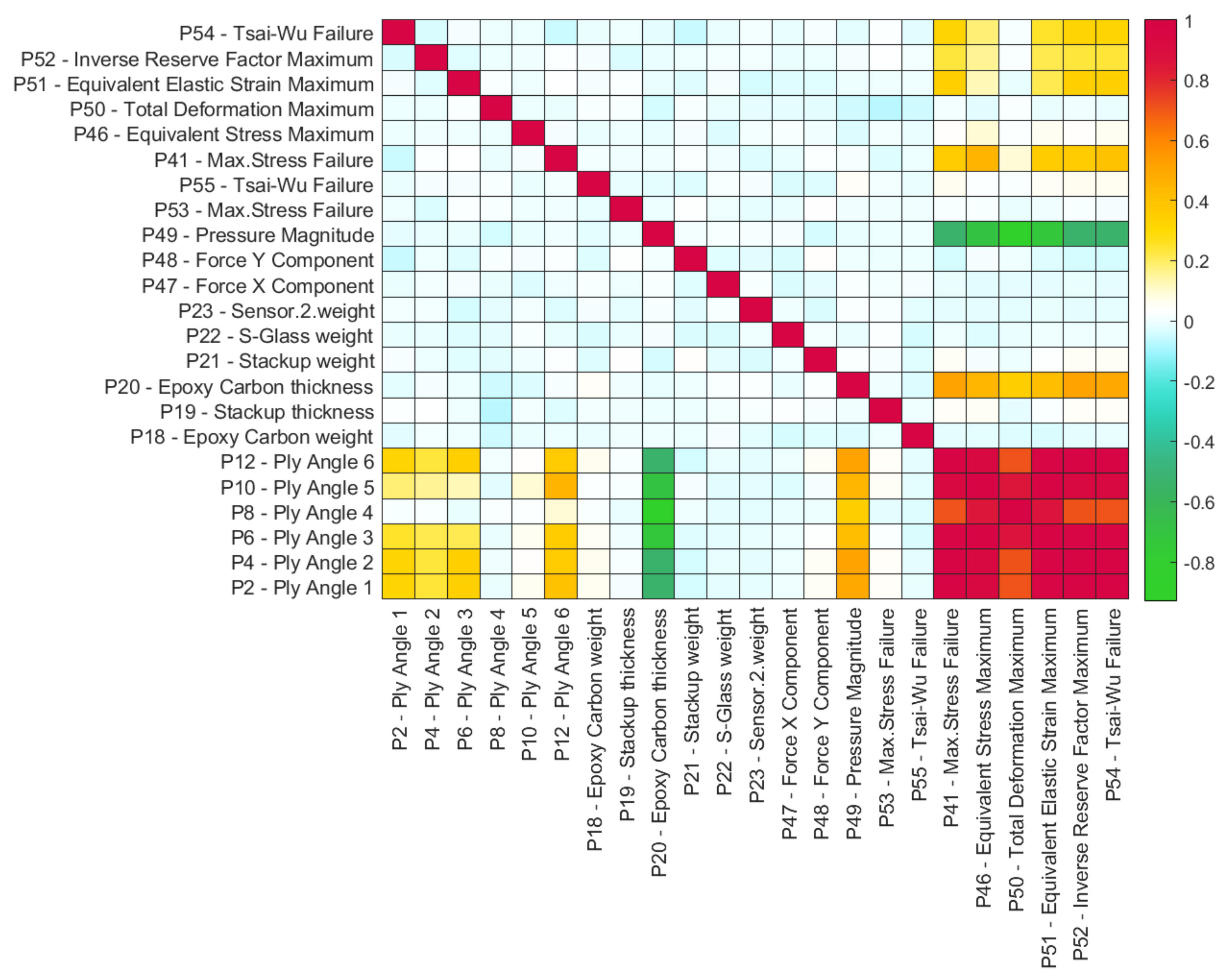
3.3.4. Preliminary Optimization Approach
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A



References
- Overton, J. Fact Sheet|The Growth in Greenhouse Gas Emissions from Commercial Aviation, Part 1 of a Series on Airlines and Climate Change; Environmental and Energy Study Institute: Washington, DC, USA, 2019. [Google Scholar]
- Botez, R. Morphing wing, UAV and aircraft multidisciplinary studies at the Laboratory of Applied Research in Active Controls, Avionics and AeroServoElasticity LARCASE. Aerosp. Lab 2018, 14, 1–11. [Google Scholar]
- Hamy, A.; Murrieta-Mendoza, A.; Botez, R. Flight trajectory optimization to reduce fuel burn and polluting emissions using a performance database and ant colony optimization algorithm. In Proceedings of the AEGATS ‘16 Advanced Aircraft Efficiency in a Global Air Transport System, Paris, France, 12–14 April 2016. [Google Scholar]
- Ameduri, S.; Concilio, A. Morphing wings review: Aims, challenges, and current open issues of a technology. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 0954406220944423. [Google Scholar] [CrossRef]
- Botez, R.M.; Molaret, P.; Laurendeau, E. Laminar flow control on a research wing project presentation covering a three year period. In Proceedings of the Canadian Aeronautics and Space Institute Annual General Meeting, Toronto, ON, Canada, 25–26 April 2007. [Google Scholar]
- Peter, F.; Lammering, T.; Risse, K.; Franz, K.; Stumpf, E. Economic assessment of morphing leading edge systems in conceptual aircraft design. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013; p. 145. [Google Scholar]
- Li, D.; Zhao, S.; Da Ronch, A.; Xiang, J.; Drofelnik, J.; Li, Y.; Zhang, L.; Wu, Y.; Kintscher, M.; Monner, H.P. A review of modelling and analysis of morphing wings. Prog. Aerosp. Sci. 2018, 100, 46–62. [Google Scholar] [CrossRef]
- Kintscher, M.; Wiedemann, M.; Monner, H.P.; Heintze, O.; Kühn, T. Design of a smart leading edge device for low speed wind tunnel tests in the European project SADE. Int. J. Struct. Integr. 2011, 2, 383–405. [Google Scholar] [CrossRef]
- Carossa, G.M.; Ricci, S.; De Gaspari, A.; Liauzun, C.; Dumont, A.; Steinbuch, M. Adaptive Trailing Edge: Specifications, Aerodynamics, and Exploitation. In Smart Intelligent Aircraft Structures (SARISTU); Springer: Berlin/Heidelberg, Germany, 2016; pp. 143–158. [Google Scholar]
- Botez, R.M. Overview of Morphing Aircraft and Unmanned Aerial Systems Methodologies and Results–Application on the Cessna Citation X, CRJ-700, UAS-S4 and UAS-S45. In Proceedings of the AIAA SCITECH 2022 Forum, San Deigo, CA, USA, 3–7 January 2022; p. 1038. [Google Scholar]
- Noviello, M.C.; Dimino, I.; Amoroso, F.; Pecora, R. Aeroelastic Assessments and Functional Hazard Analysis of a Regional Aircraft Equipped with Morphing Winglets. Aerospace 2019, 6, 104. [Google Scholar] [CrossRef]
- Concilio, A.; Dimino, I.; Pecora, R. SARISTU: Adaptive Trailing Edge Device (ATED) design process review. Chin. J. Aeronaut. 2021, 34, 187–210. [Google Scholar] [CrossRef]
- Liauzun, C.; Le Bihan, D.; David, J.-M.; Joly, D.; Paluch, B. Study of morphing winglet concepts aimed at improving load control and the aeroelastic behavior of civil transport aircraft. Aerosp. Lab 2018, 14, 1–15. [Google Scholar]
- Carrier, G.; Atinault, O.; Dequand, S.; Hantrais-Gervois, J.; Liauzun, C.; Paluch, B.; Rodde, A.; Toussaint, C. Investigation of a strut-braced wing configuration for future commercial transport. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Smith, J.W. Variable-Camber Systems Integration and Operational Performance of the AFTI/F-111 Mission Adaptive Wing; National Aeronautics and Space Administration—NASA, Office of Management: Washington, DC, USA, 1992; Volume 4370.
- De Gaspari, A.; Moens, F. Aerodynamic shape design and validation of an advanced high-lift device for a regional aircraft with morphing droop nose. Int. J. Aerosp. Eng. 2019, 2019, 7982168. [Google Scholar] [CrossRef]
- Moens, F. Augmented aircraft performance with the use of morphing technology for a turboprop regional aircraft wing. Biomimetics 2019, 4, 64. [Google Scholar] [CrossRef]
- Arena, M.; Concilio, A.; Pecora, R. Aero-servo-elastic design of a morphing wing trailing edge system for enhanced cruise performance. Aerosp. Sci. Technol. 2019, 86, 215–235. [Google Scholar] [CrossRef]
- Bashir, M.; Longtin-Martel, S.; Botez, R.M.; Wong, T. Aerodynamic Design Optimization of a Morphing Leading Edge and Trailing Edge Airfoil—Application on the UAS-S45. Appl. Sci. 2021, 11, 1664. [Google Scholar] [CrossRef]
- Sugar Gabor, O.; Simon, A.; Koreanschi, A.; Botez, R. Application of a morphing wing technology on hydra technologies unmanned aerial system UAS-S4. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2014; p. V001T001A037. [Google Scholar]
- Sugar Gabor, O.; Simon, A.; Koreanschi, A.; Botez, R.M. Aerodynamic performance improvement of the UAS-S4 Éhecatl morphing airfoil using novel optimization techniques. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 1164–1180. [Google Scholar] [CrossRef]
- Bashir, M.; Longtin Martel, S.; Botez, R.M.; Wong, T. Aerodynamic Design and Performance Optimization of Camber Adaptive Winglet for the UAS-S45. In Proceedings of the AIAA SCITECH 2022 Forum, San Deigo, CA, USA, 3–7 January 2022; p. 1041. [Google Scholar]
- Monner, H.; Kintscher, M.; Lorkowski, T.; Storm, S. Design of a smart droop nose as leading edge high lift system for transportation aircrafts. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 17th AIAA/ASME/AHS Adaptive Structures Conference 11th AIAA No, Palm Springs, CA, USA, 4–7 May 2009; p. 2128. [Google Scholar]
- Pecora, R. Morphing wing flaps for large civil aircraft: Evolution of a smart technology across the Clean Sky program. Chin. J. Aeronaut. 2021, 34, 13–28. [Google Scholar] [CrossRef]
- Dimino, I.; Pecora, R.; Arena, M. Aircraft morphing systems: Elasticity of selected components and modelling issues. In Proceedings of the Active and Passive Smart Structures and Integrated Systems IX, Online, 27 April–8 May 2020; p. 113760M. [Google Scholar]
- Botez, R.; Koreanschi, A.; Gabor, O.; Tondji, Y.; Guezguez, M.; Kammegne, J.; Grigorie, L.; Sandu, D.; Mebarki, Y.; Mamou, M. Numerical and experimental transition results evaluation for a morphing wing and aileron system. Aeronaut. J. 2018, 122, 747–784. [Google Scholar] [CrossRef]
- Communier, D.; Botez, R.M.; Wong, T. Design and validation of a new morphing camber system by testing in the price—Païdoussis subsonic wind tunnel. Aerospace 2020, 7, 23. [Google Scholar] [CrossRef]
- Elelwi, M.; Kuitche, M.; Botez, R.; Dao, T. Comparison and analyses of a variable span-morphing of the tapered wing with a varying sweep angle. Aeronaut. J. 2020, 124, 1146–1169. [Google Scholar] [CrossRef]
- Khan, S.; Grigorie, T.; Botez, R.; Mamou, M.; Mébarki, Y. Novel morphing wing actuator control-based Particle Swarm Optimisation. Aeronaut. J. 2020, 124, 55–75. [Google Scholar] [CrossRef]
- Communier, D.; Botez, R.; Wong, T. Experimental validation of a new morphing trailing edge system using Price–Païdoussis wind tunnel tests. Chin. J. Aeronaut. 2019, 32, 1353–1366. [Google Scholar] [CrossRef]
- Gamboa, P.; Vale, J.; Lau, F.; Suleman, A. Optimization of a morphing wing based on coupled aerodynamic and structural constraints. AIAA J. 2009, 47, 2087–2104. [Google Scholar] [CrossRef]
- Tianyuan, H.; Xiongqing, Y. Aerodynamic/stealthy/structural multidisciplinary design optimization of unmanned combat air vehicle. Chinese J. Aeronaut. 2009, 22, 380–386. [Google Scholar] [CrossRef]
- Koreanschi, A.; Sugar Gabor, O.; Acotto, J.; Botez, R.M.; Mamou, M.; Mebarki, Y. A genetic algorithm optimization method for a morphing wing tip demonstrator validated using infra red experimental data. In Proceedings of the 34th AIAA applied aerodynamics conference, Washington, DC, USA, 13–17 June 2016; p. 4037. [Google Scholar]
- Koreanschi, A.; Sugar-Gabor, O.; Botez, R.M. Drag optimisation of a wing equipped with a morphing upper surface. Aeronaut. J. 2016, 120, 473. [Google Scholar] [CrossRef]
- Grigorie, T.L.; Botez, R.M.; Popov, A.V.; Mamou, M.; Mébarki, Y. A hybrid fuzzy logic proportional-integral-derivative and conventional on-off controller for morphing wing actuation using shape memory alloy Part 1: Morphing system mechanisms and controller architecture design. Aeronaut. J. 2012, 116, 433–449. [Google Scholar] [CrossRef]
- Popov, A.V.; Grigorie, T.L.; Botez, R.M.; Mébarki, Y.; Mamou, M. Modeling and testing of a morphing wing in open-loop architecture. J. Aircr. 2010, 47, 917–923. [Google Scholar] [CrossRef]
- Skinner, S.N.; Zare-Behtash, H. State-of-the-art in aerodynamic shape optimisation methods. Appl. Soft Comput. 2018, 62, 933–962. [Google Scholar] [CrossRef]
- Hicken, J.E. Efficient Algorithms for Future Aircraft Design: Contributions to Aerodynamic Shape Optimization; University of Toronto: Toronto, ON, Canada, 2009. [Google Scholar]
- Nonut, A.; Kanokmedhakul, Y.; Bureerat, S.; Kumar, S.; Tejani, G.G.; Artrit, P.; Yıldız, A.R.; Pholdee, N. A small fixed-wing UAV system identification using metaheuristics. Cogent Eng. 2022, 9, 2114196. [Google Scholar] [CrossRef]
- Champasak, P.; Panagant, N.; Pholdee, N.; Vio, G.A.; Bureerat, S.; Yildiz, B.S.; Yıldız, A.R. Aircraft conceptual design using metaheuristic-based reliability optimisation. Aerosp. Sci. Technol. 2022, 129, 107803. [Google Scholar] [CrossRef]
- Koreanschi, A.; Sugar Gabor, O.; Acotto, J.; Brianchon, G.; Portier, G.; Botez, R.M.; Mamou, M.; Mebarki, Y. Optimization and Design of an aircraft’s morphing wing-tip demonstrator for drag reduction at low speed, Part I–Aerodynamic optimization using genetic, bee colony and gradient descent algorithms. Chin. J. Aeronaut. 2017, 30, 149–163. [Google Scholar] [CrossRef]
- Tian, X.; Li, J. A novel improved fruit fly optimization algorithm for aerodynamic shape design optimization. Knowl. -Based Syst. 2019, 179, 77–91. [Google Scholar] [CrossRef]
- Shmilovich, A.; Yadlin, Y. Flow control techniques for transport aircraft. AIAA J. 2011, 49, 489–502. [Google Scholar] [CrossRef]
- Stanewsky, E. Adaptive wing and flow control technology. Prog. Aerosp. Sci. 2001, 37, 583–667. [Google Scholar] [CrossRef]
- Sankar, L.N.; Sahin, M.; Gopal, N. Dynamic Stall Characteristics of Drooped Leading Edge Airfoils; NASA Report, Document ID: 20010004630; National Aeronautics and Space Administration—NASA: Washington, DC, USA, 2000.
- Sahin, M.; Sankar, L.N.; Chandrasekhara, M.; Tung, C. Dynamic stall alleviation using a deformable leading edge concept—A numerical study. J. Aircr. 2003, 40, 77–85. [Google Scholar] [CrossRef]
- Martin, P.; McAlister, K.; Chandrasekhara, M.; Geissler, W. Dynamic Stall Measurements and Computations for a VR-12 Airfoil with a Variable Droop Leading Edge; National Aeronautics and Space Administration—NASA: Washington, DC, USA, 2003.
- Perry, M.; Mueller, T. Leading-and trailing-Edge flaps on a low Reynolds number airfoil. J. Aircr. 1987, 24, 653–659. [Google Scholar] [CrossRef]
- Lee, B.-S.; Ye, K.; Joo, W.; Lee, D.-H. Passive control of dynamic stall via nose droop with Gurney flap. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 10–13 January 2005; p. 1364. [Google Scholar]
- Chandrasekhara, M.; Martin, P.B.; Tung, C. Compressible dynamic stall control using a variable droop leading edge airfoil. J. Aircr. 2004, 41, 862–869. [Google Scholar] [CrossRef]
- Bashir, M.; Longtin-Martel, S.; Botez, R.M.; Wong, T. Optimization and Design of a Flexible Droop-Nose Leading-Edge Morphing Wing Based on a Novel Black Widow Optimization Algorithm—Part I. Designs 2022, 6, 10. [Google Scholar] [CrossRef]
- Winyangkul, S.; Wansaseub, K.; Sleesongsom, S.; Panagant, N.; Kumar, S.; Bureerat, S.; Pholdee, N. Ground Structures-Based Topology Optimization of a Morphing Wing Using a Metaheuristic Algorithm. Metals 2021, 11, 1311. [Google Scholar] [CrossRef]
- Thill, C.; Etches, J.; Bond, I.; Potter, K.; Weaver, P. Morphing skins. Aeronaut. J. 2008, 112, 117–139. [Google Scholar] [CrossRef]
- Murugan, S.; Friswell, M. Morphing wing flexible skins with curvilinear fiber composites. Compos. Struct. 2013, 99, 69–75. [Google Scholar] [CrossRef]
- Chillara, V.; Dapino, M. Review of morphing laminated composites. Appl. Mech. Rev. 2020, 72, 010801. [Google Scholar] [CrossRef]
- Cantwell, W.J.; Morton, J. The impact resistance of composite materials—A review. Composites 1991, 22, 347–362. [Google Scholar] [CrossRef]
- Wilcox, R.R.; Muska, J. Comparing correlation coefficients. Commun. Stat.-Simul. Comput. 2002, 31, 49–59. [Google Scholar] [CrossRef]
- Gideon, R.A. The correlation coefficients. J. Mod. Appl. Stat. Methods 2007, 6, 16. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Black Widow Optimization Algorithm | Genetic Algorithm | Particle Swarm Optimization | |||
|---|---|---|---|---|---|
| Spider Size | 40 | Population Size | 40 | Swarm Size | 40 |
| Generations | 50 | Generations | 50 | Iterations | 50 |
| Reproduction rate | 0.6 | Crossover | 0.7 | Cognitive factor (C1) | 1.2 |
| Cannibalism rate | 0.44 | Mutation | 0.3 | Social factor (C2) | 1.2 |
| Mutation rate | 0.4 | ||||
| Material Properties | Carbon/Epoxy | S-Glass/Epoxy |
|---|---|---|
| 59,160 | 50,000 | |
| 59,160 | 8000 | |
| 7500 | 8000 | |
| 17,500 | 5000 | |
| 2700 | 3846.1 | |
| 0.004 | 0.3 | |
| 0.3 | 0.4 |
| Thickness | |
| P20 | Material thickness (ply thickness) |
| P19 | Material thickness (Stack thickness) |
| Geometry | |
| P2 | Ply Angle 1 |
| P4 | Ply Angle 2 |
| P6 | Ply Angle 3 |
| P8 | Ply Angle 4 |
| P10 | Ply Angle 5 |
| P12 | Ply Angle 6 |
| P18 | Epoxy Carbon Weight |
| P19 | Stack Thickness |
| P21 | Stackup Weight |
| Loads | |
| P47 | Force X Component |
| P48 | Force Y Component |
| P49 | Pressure Magnitude |
| Failure criteria | |
| P53 | Max. Stress Failure |
| P55 | Tsai-Wu Failure |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bashir, M.; Longtin-Martel, S.; Zonzini, N.; Botez, R.M.; Ceruti, A.; Wong, T. Optimization and Design of a Flexible Droop Nose Leading Edge Morphing Wing Based on a Novel Black Widow Optimization (B.W.O.) Algorithm—Part II. Designs 2022, 6, 102. https://doi.org/10.3390/designs6060102
Bashir M, Longtin-Martel S, Zonzini N, Botez RM, Ceruti A, Wong T. Optimization and Design of a Flexible Droop Nose Leading Edge Morphing Wing Based on a Novel Black Widow Optimization (B.W.O.) Algorithm—Part II. Designs. 2022; 6(6):102. https://doi.org/10.3390/designs6060102
Chicago/Turabian StyleBashir, Musavir, Simon Longtin-Martel, Nicola Zonzini, Ruxandra Mihaela Botez, Alessandro Ceruti, and Tony Wong. 2022. "Optimization and Design of a Flexible Droop Nose Leading Edge Morphing Wing Based on a Novel Black Widow Optimization (B.W.O.) Algorithm—Part II" Designs 6, no. 6: 102. https://doi.org/10.3390/designs6060102
APA StyleBashir, M., Longtin-Martel, S., Zonzini, N., Botez, R. M., Ceruti, A., & Wong, T. (2022). Optimization and Design of a Flexible Droop Nose Leading Edge Morphing Wing Based on a Novel Black Widow Optimization (B.W.O.) Algorithm—Part II. Designs, 6(6), 102. https://doi.org/10.3390/designs6060102