A nanogrid is often controlled using a distributed control technique that uses DC bus signaling (DBS), which involves droop control. Each distributed energy resource has a threshold voltage to operate at, in which the power electronics interface injects no current, according to the DC bus signaling concept. Based on V vs. I curves for each component, which is effectively DC bus signaling, a supervisory controller of the nanogrid may control power flow and manage energy in the system. In this paper, supervisory control is employed to adjust the threshold voltage of the SC converter in accordance with the DC bus voltage.
2.1. Power Control and Current Sharing of DERs
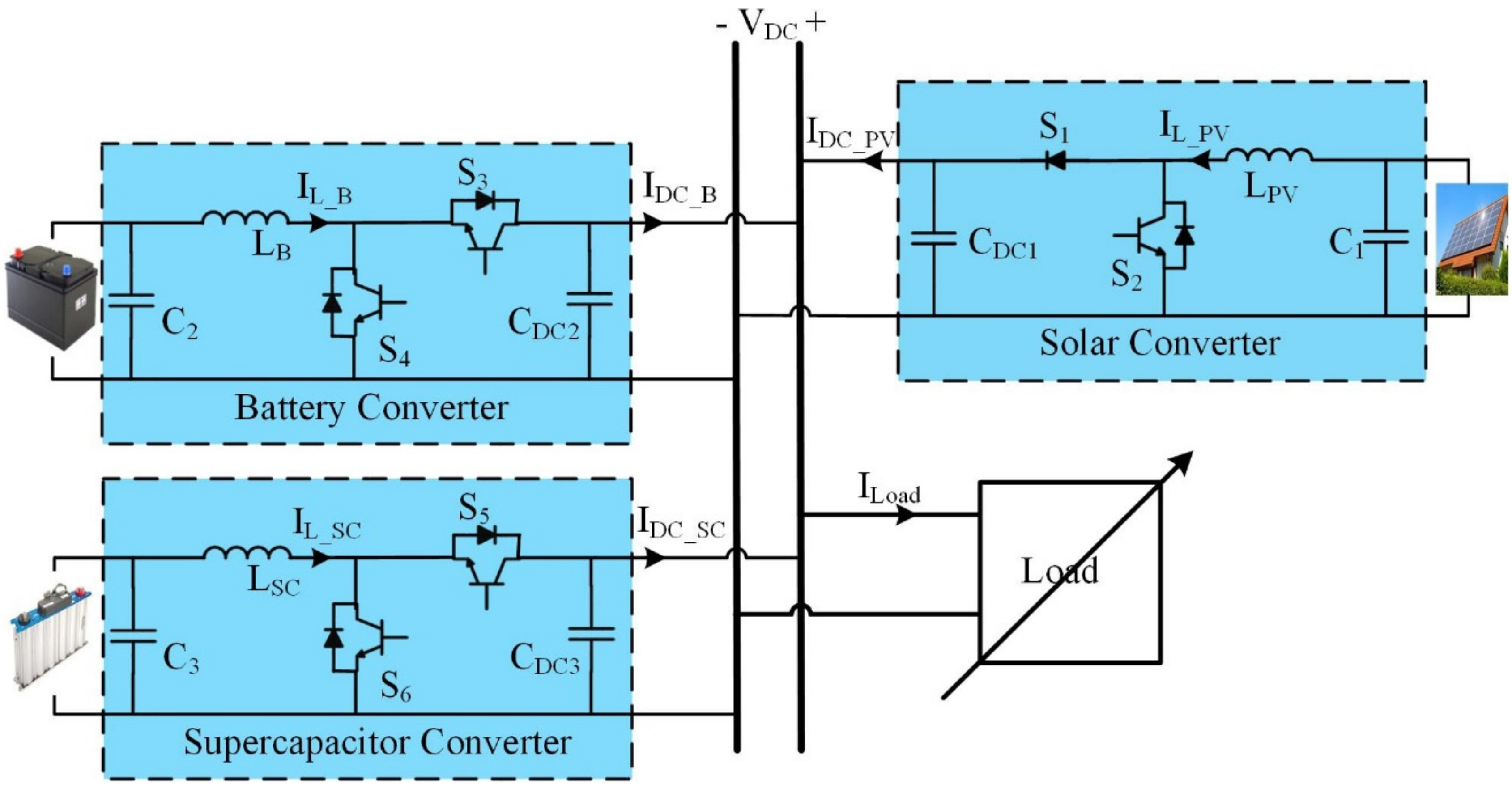
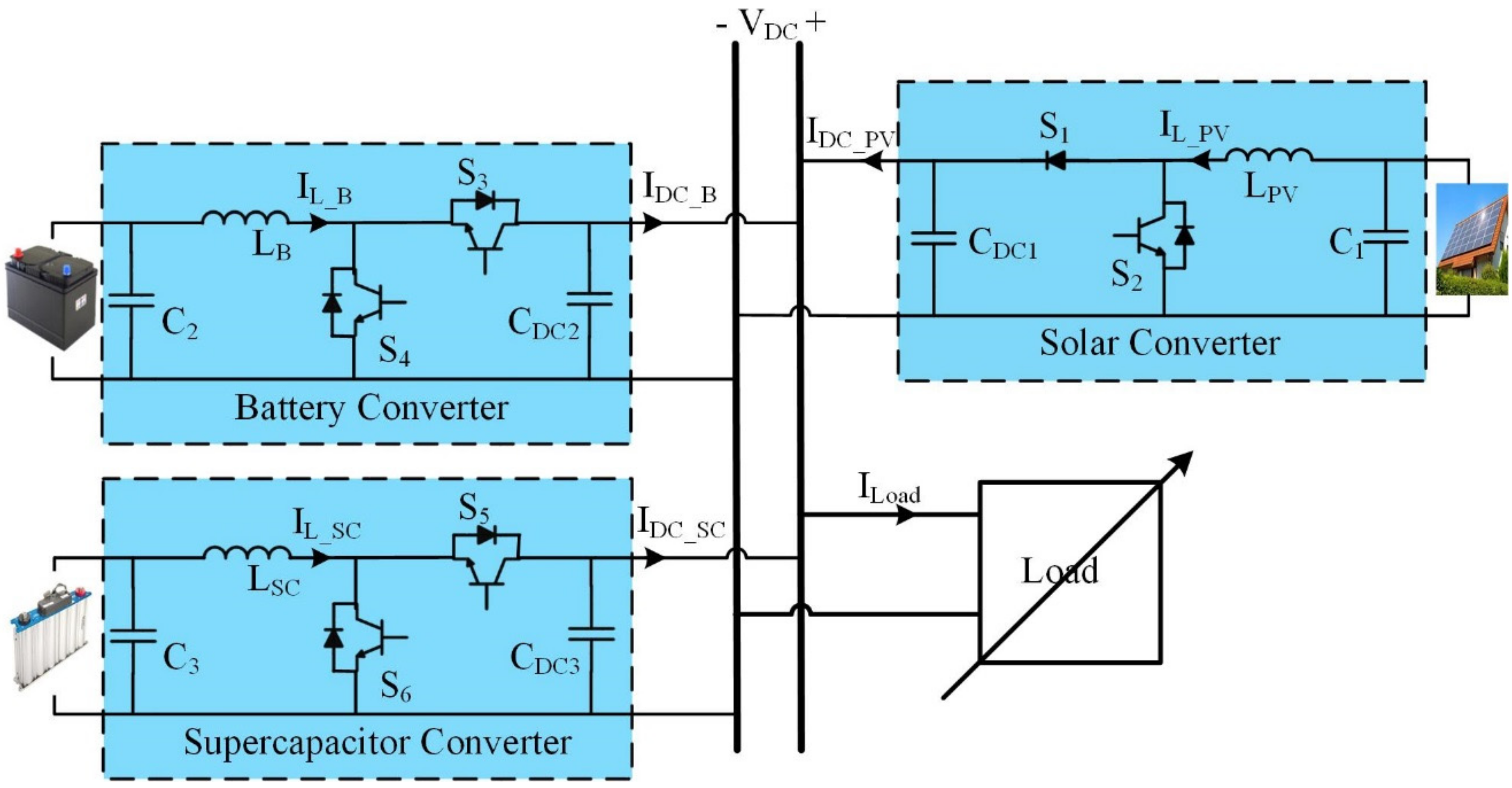
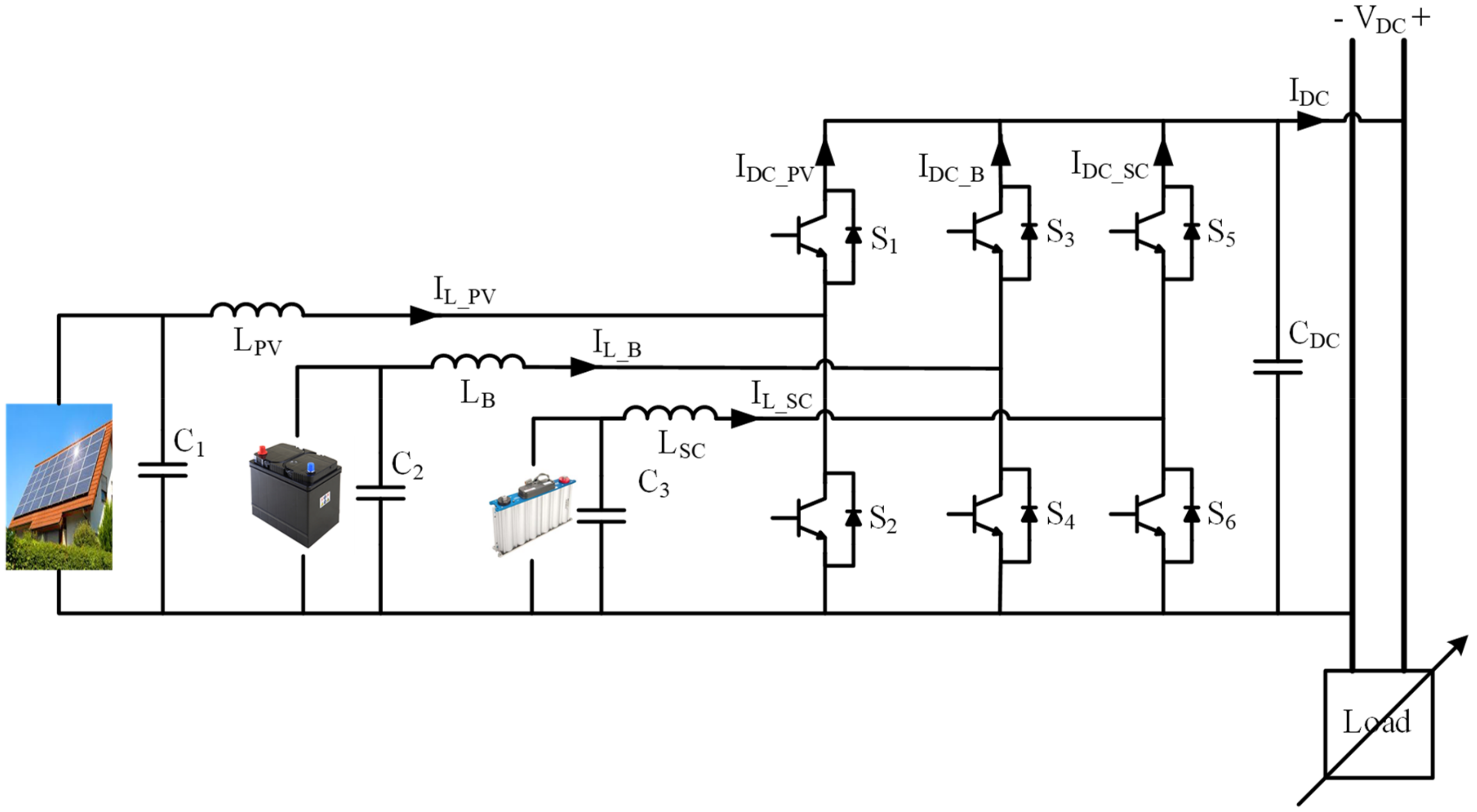
As indicated in
Figure 1, the DC nanogrid studied in this research comprises an RES, battery, SC storage units, and a variable load. The RES uses a unidirectional boost converter, while the storage units need a bidirectional boost converter, commonly a class C DC-DC converter. The battery and SC may be managed as a single HESS, in which case they should be co-located or located separately, as recommended in this study, which is suited for distributed energy storage units. With a hierarchical structure based on DBS and droop control, the single-bus DC nanogrid is controlled and decentralized. On the other hand, this report does not mention energy management communication methods. DBS coordinates the functioning of DERs in a decentralized manner by using the DC bus voltage as the communication channel. The current injected by each DER in the nanogrid with droop control is determined by its threshold voltage (
VNL), where the injected current is zero, and its droop slope factor
Rd, as indicated by (1). The latter affects how the injected current changes when the grid voltage changes.
where:
DBS is the nanogrid’s primary control level in the hierarchical structure. The nominal voltage of the DC nanogrid studied in this work is
1 pu. It was designed to work with a
±5% voltage regulation, resulting in an operational DC bus voltage of
0.95 pu to
1.05 pu. The threshold voltage for RESs is often
VNL_PV = 1.05 pu, greater than the threshold voltage for the energy storage unit or HESS,
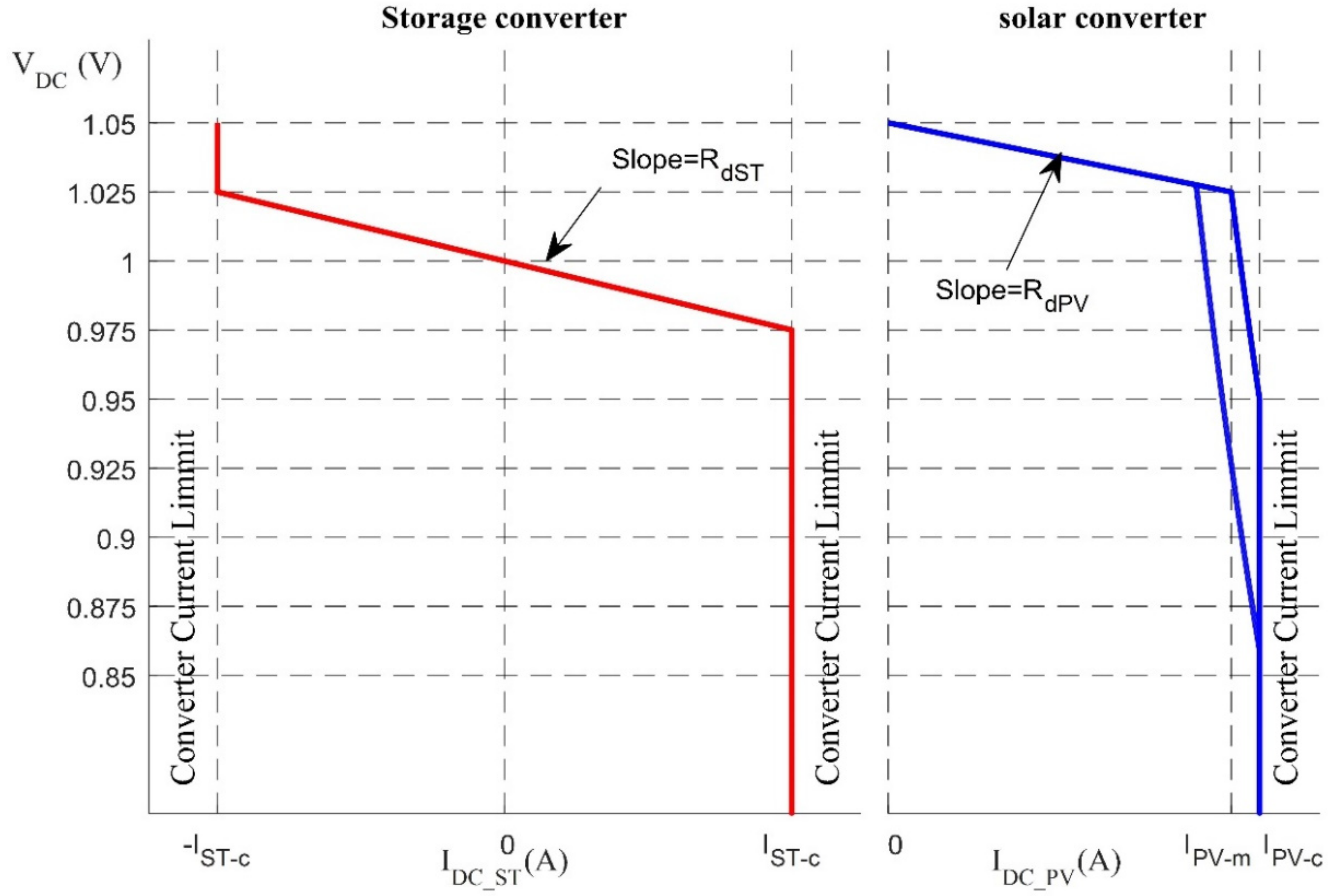
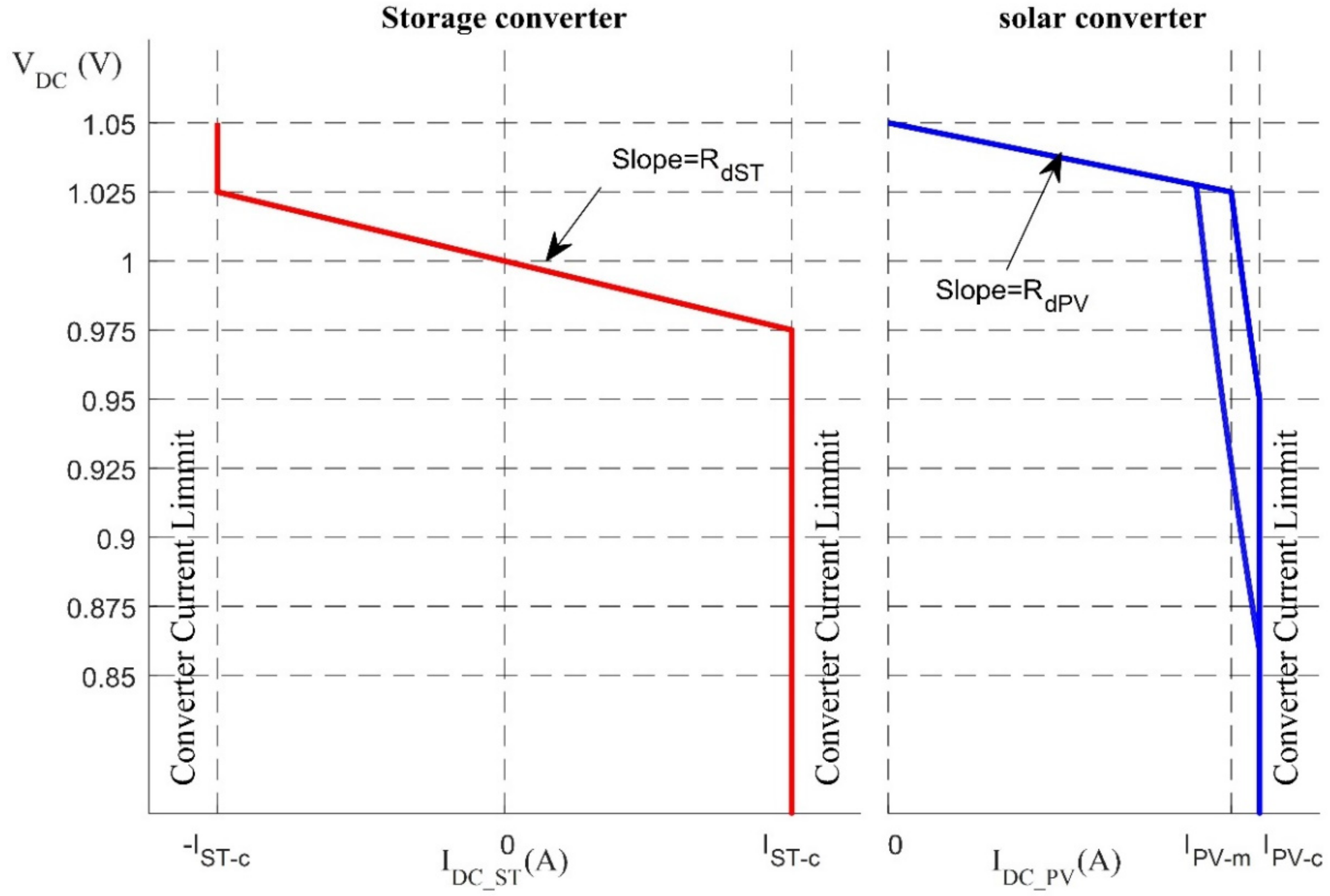
VNL_ST = 1 pu. The DBS model provides RESs the greatest priority to feed the loads if they are available and generate electricity. The solar converter runs in three states, as indicated in
Figure 2, by the blue curve: droop, constant power, and constant current limited with unidirectional power flow. The solar converter runs with droop factor RdPV when the DC bus voltage is between
1.05 pu and
1.025 pu. As a result, at
VDC = 1.025 pu, the solar produces the maximum power and begins to function at maximum power point tracking (MPPT) with the rated solar irradiance. When the PV’s maximum power is less than the rated power owing to decreasing solar irradiance, the solar converter should begin to function at MPPT before the DC bus voltage goes below
1.025 pu, which may be accomplished by “reprogramming” the solar converter’s V-I curve, as illustrated in
Figure 2. The solar converter, for example, should start operating at MPPT with a DC bus voltage of
1.029 pu with a maximum power of
90% of the rated power. The solar converter switches to a constant current-limited mode when the DC bus voltage falls below
0.95 pu for rated solar irradiation [
2].
2.2. Power Control and Current Sharing of HESS
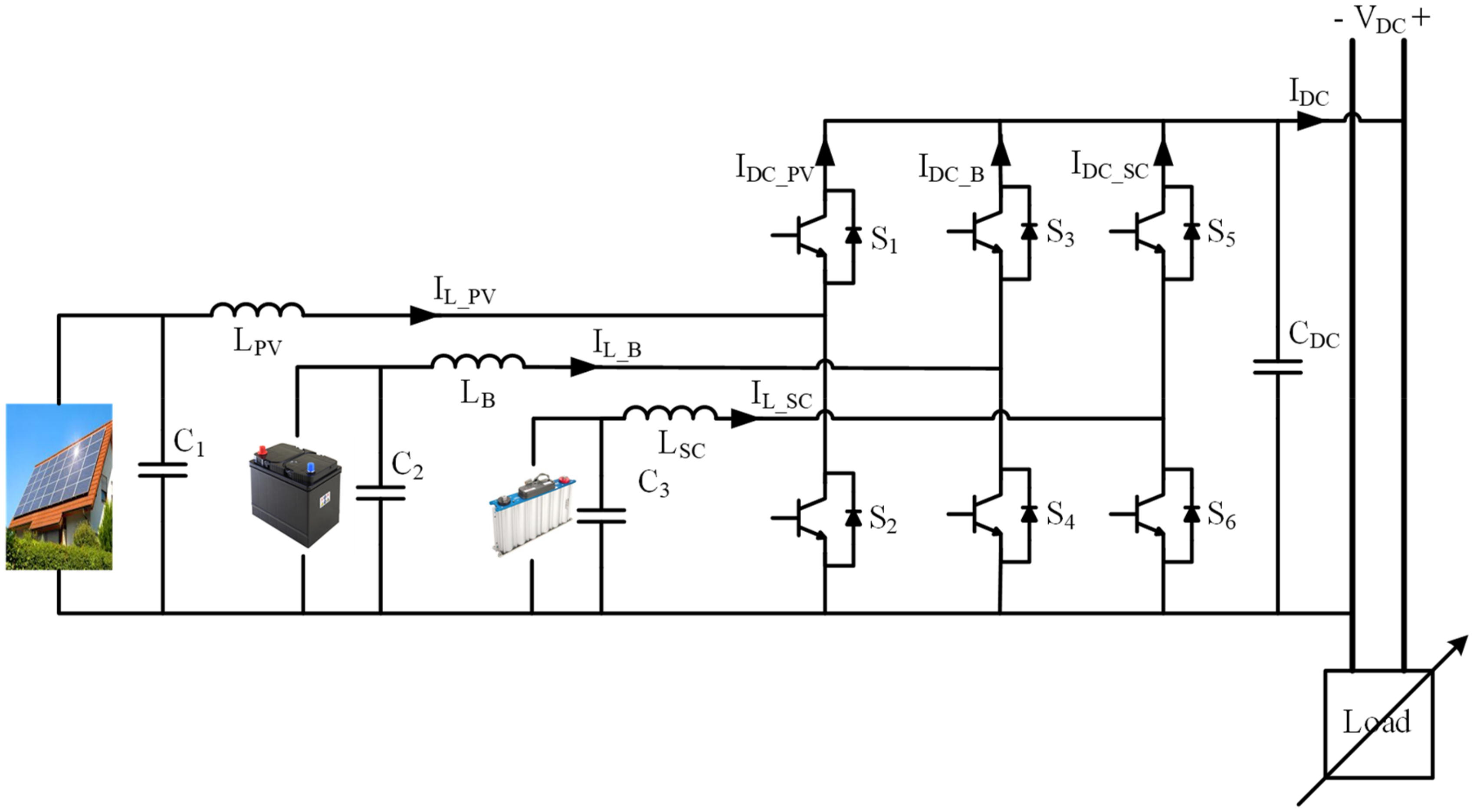
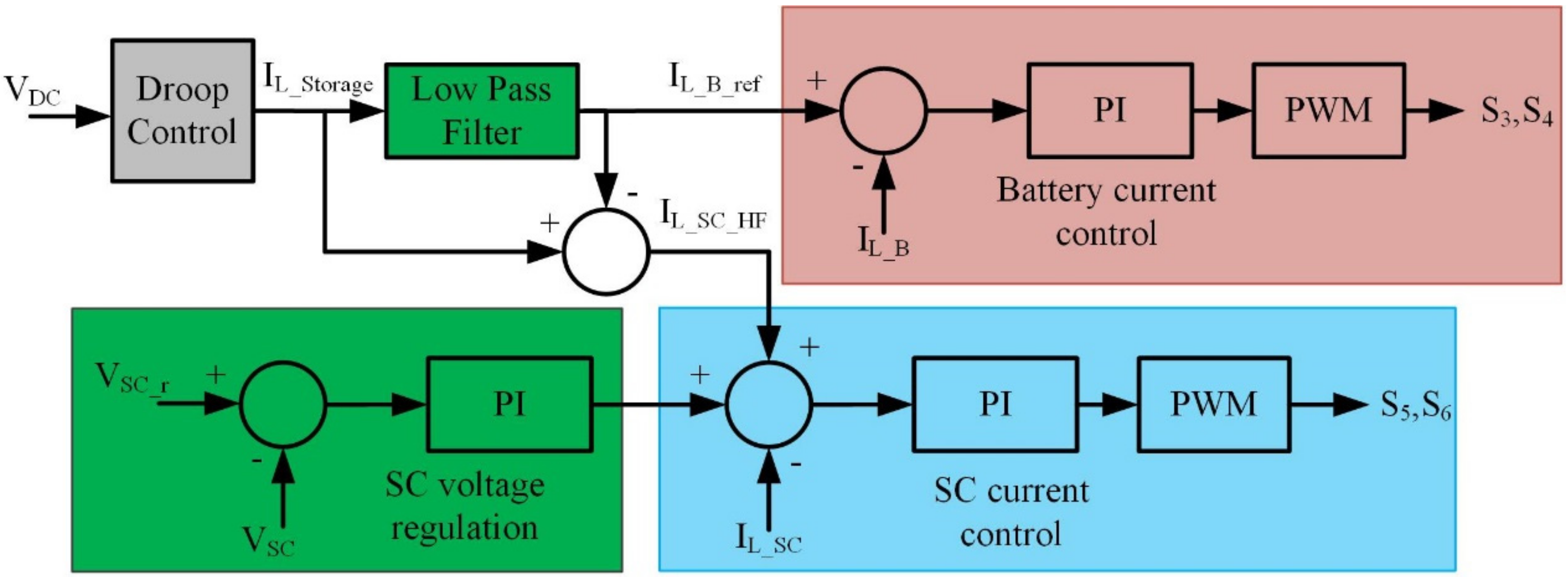
The battery and SC are co-located and operated as a HESS traditionally, as illustrated in
Figure 3, to achieve a specific I vs. V curve or droop characteristic. The supercapacitor operates in conjunction to and parallel with the battery to provide rapid bursts of power that minimize the high-frequency component of the transient battery response, resulting in a smooth transition for the battery. In this technique, the battery inductor current is divided by LPF into low-frequency and high-frequency components, creating the battery inductor reference current and the supercapacitor inductor reference current. The DC bus voltage is detected in a DC nanogrid with droop control, and an outer voltage loop proportional (P) control, which corresponds to the droop action, generates a reference current to be established by the battery and the SC converters. A high-pass filter (HPF) or a low-pass filter (LPF) separates the reference current’s slow and rapid changing components. The inner battery current control loop uses the slow ones as a reference, while the inner SC current control loop uses the fast ones. The outer voltage loop’s bandwidth is approximately
10% of the inner current loops. It is quite good at keeping quickly-changing currents out of the battery. A voltage loop is included in the SC’s control scheme to maintain the SC’s voltage within a desirable range, often
50% to
100% of its rated value. The SC has a state-of-charge with an equal energy capacity to provide and absorb power before exceeding the limit voltage values by setting the reference voltage at
79% of the rated value. Its bandwidth is generally
10% of the HESS’s voltage (droop) loop. Splitting the entire current (
IL_Storage) given by HESS into average components, such as the battery reference current, the transient power components, and the SC reference current, improves the battery’s performance but not the DC bus voltage dynamics. Furthermore, HESS’s entire current (
IL_Storage) is generated via a common voltage loop, which involves communication between the battery and SC converters. This is not acceptable for usage in nanogrids with decentralized DERs that employ droop control and DC bus signaling.
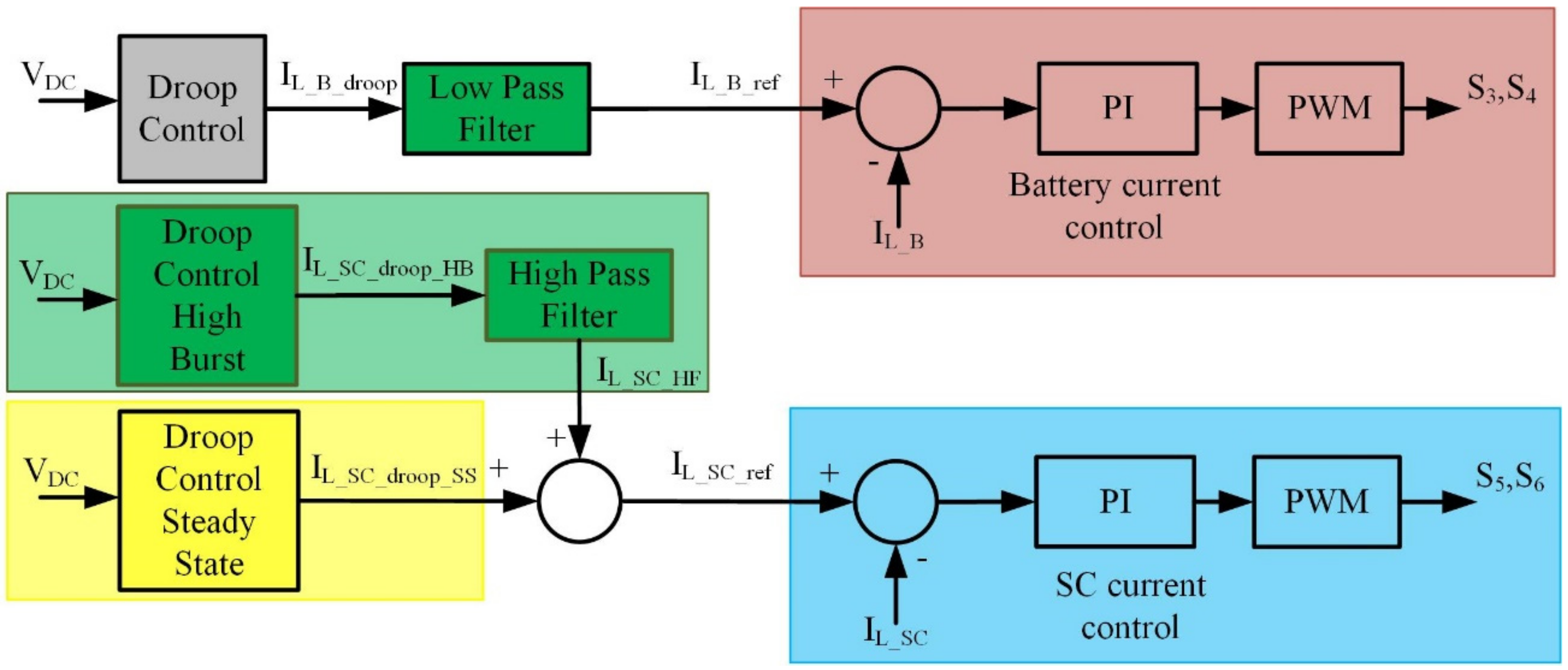
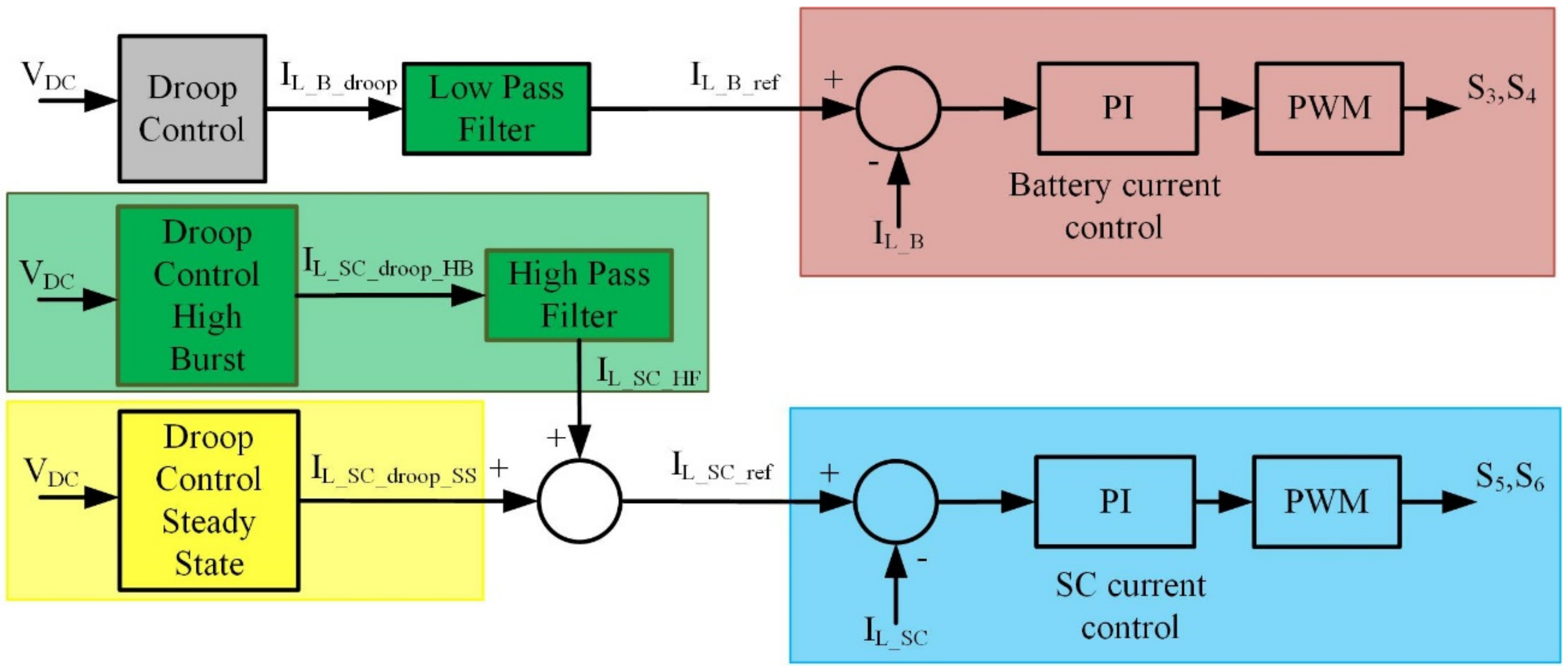
The SC interface is regulated separately from the battery interface in the proposed way depicted in
Figure 4, allowing it to offer extra service to the DC nanogrid. This is accomplished using two I vs. V curves for the SC; The first is to provide brief bursts of power to improve the dynamic response of the DC bus voltage and, as a result, to avoid fast-changing currents in the battery. The second is to utilize the energy stored in the supercapacitor as an extra distributed energy resource in the nanogrid, and to help with the dribbling, but not steady-state, voltage control of the DC nanogrid. In the first I vs. V curve, choosing a droop factor for the SC interface substantially lower than the battery’s, results in a larger gain for the SC interface’s outer DC bus voltage loop. Consequently, a given DC bus voltage variance will offer a significantly larger current reference, enhancing dynamic voltage control. Remember that the first I vs. V curve is built to deliver/absorb intense bursts of power. However, the length of the power bursts should be restricted due to its low energy density, which may be completed by adding a HPF with a sufficient time constant in the input of its inner current loop. However, assuming that the SC interface will prevent fast variations in the DC bus voltage and, as a result, sharp variations in the battery interface’s reference current, there is no need for an LPF in the input of the inner current loop of the battery interface. The authors present a detailed design of the first I vs. V curve and the HPF [
2]. The method was verified using simulation and experimental results. This paper focuses on designing the second I vs. V curve based on the supervisory control.
The second suggested component for the supercapacitor reference current also helps with power management in the DC nanogrid for an extended period, compared to high-burst power and for a short time compared to the battery. The voltage control of the DC bus should be enhanced/improved by this current component. The long-term current is calculated using a droop control loop using a standard droop constant RdSC2, similar to that used in battery units. Because the DC bus voltage indicates the availability of power in the DC nanogrid, a high voltage level indicates a light load or surplus generation, and it increases the likelihood of a positive power burst, in which case the supercapacitor will be charged to store a large amount of energy. When the DC bus voltage is low, which indicates a high load or a power shortage, there is a greater probability of a negative power burst, in which case the supercapacitor will be discharged, resulting in low energy stored. The dribbling current is calculated using a droop control loop using a standard droop constant RdSC2, similar to that used in battery units. Because the DC bus voltage indicates the availability of power in the DC nanogrid, a high voltage level indicates a light load or surplus generation, which increases the likelihood of a positive power burst, in which case the supercapacitor will be charged to store a large amount of energy. When the DC bus voltage is low, which indicates a high load or a power shortage, there is a greater probability of a negative power burst, in which case the supercapacitor will be discharged, resulting in low energy stored. The change of the operating voltage of the supercapacitor between 50% and 100% of its rated voltage based on the information from the DC bus voltage gives 75% of its stored energy to deal with the maximum sudden change for both positive and negative changes. When the DC bus voltage is about 1.025 pu, the supercapacitor voltage is set to 100% of its maximum voltage, indicating that the DC bus has more available power and is projected to have the most significant positive load change. When the DC bus voltage is 0.975 pu, the supercapacitor voltage is set to 50% of its maximum voltage since the DC bus has less available power and is projected to have the most negative load change. As the DC bus voltage fluctuates from 1.025 pu to 0.975 pu, the supercapacitor voltage varies from 100% to 50% of its maximum voltage. However, the suggested method would add a second control loop, which would make the control system slightly more complicated than the primary one while not adding to the electrical system’s complexity.
The supercapacitor charging and discharging control is a droop control based on the DC bus, which has a lower influence on the DC bus voltage regulation. Varying the threshold voltage of the supercapacitor (VNL_SC) as a function of the supercapacitor voltage controls the supercapacitor voltage. This reduces the risk of overcharging the supercapacitor, giving it a better chance of feeding power to the DC nanogrid. Furthermore, with a low supercapacitor voltage, the supercapacitor does not discharge and has a better chance of being charged again. The supercapacitor’s threshold voltage fluctuates as a function of the supercapacitor voltage. The suggested logic changes the threshold voltage charges or discharges the supercapacitor to a voltage level (VSC) where the supercapacitor’s steady-state current is zero. In other words, the DC bus voltage in the steady state equals the supercapacitor’s threshold voltage at that voltage (VSC). The threshold voltage level is based on the DC bus voltage to cope with the most significant sudden change in the load current and the power availability in the nanogrid. This implies that the supercapacitor threshold voltage is adjusted to maintain the capacity to handle intense bursts of power.
The most significant high burst of power (PHSC max) that a supercapacitor can provide for a given voltage level (VSC) and duration (Δt) is equal to:
where
ΔE is:
Substituting
ΔE from (4) into (3) gives:
For a lossless converter, the supercapacitor’s maximum high burst power is equal to the converter’s output power.
After that, for (
RdSC1) of the high burst of power, using the droop Equation in (1) to substitute
IDC_SC_h:
Solve for (
VNL_SC) by equating Equations (5) and (7).
For a maximum high burst of power
PHEC_max, the discharging time (
Δt) is:
Considering the burst of power when the DC bus voltage changed from
VDC_max to
VDC_min:
Then, by substituting (10) in (9) and substituting (
Δt) in (8), one finds
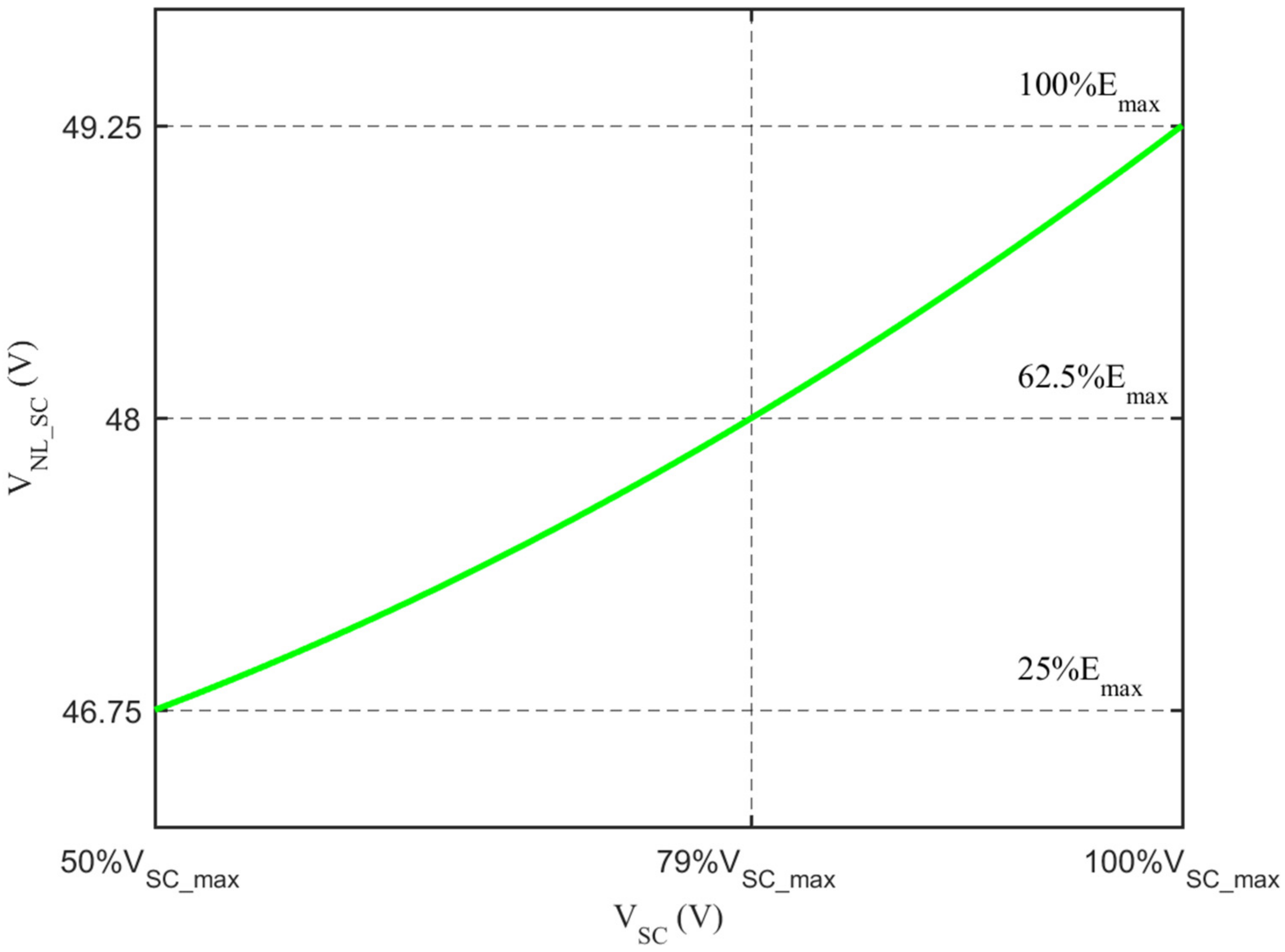
VNL_SC as:
That leads to:
where
KN is constantly given by:
where (
VDC_max) and (
VDC_min) are the maximum and minimum DC bus voltages for the storage unit to operate in droop mode, respectively, and are equivalent to 1.025 pu and 0.975 pu from the I vs. V curve in
Figure 2. The battery and SC operate with the converter current limiting when the DC bus voltage is more than 1.025 pu and less than 0.975 pu, resulting in no change in the injected current. While (
VSC_max) is the supercapacitor’s rated voltage, (
VSC_min) is the supercapacitor’s minimum voltage, which is equal to 50% of (
VSC_max).
Figure 5 displays the (
VNL_SC) at various supercapacitor voltage levels.
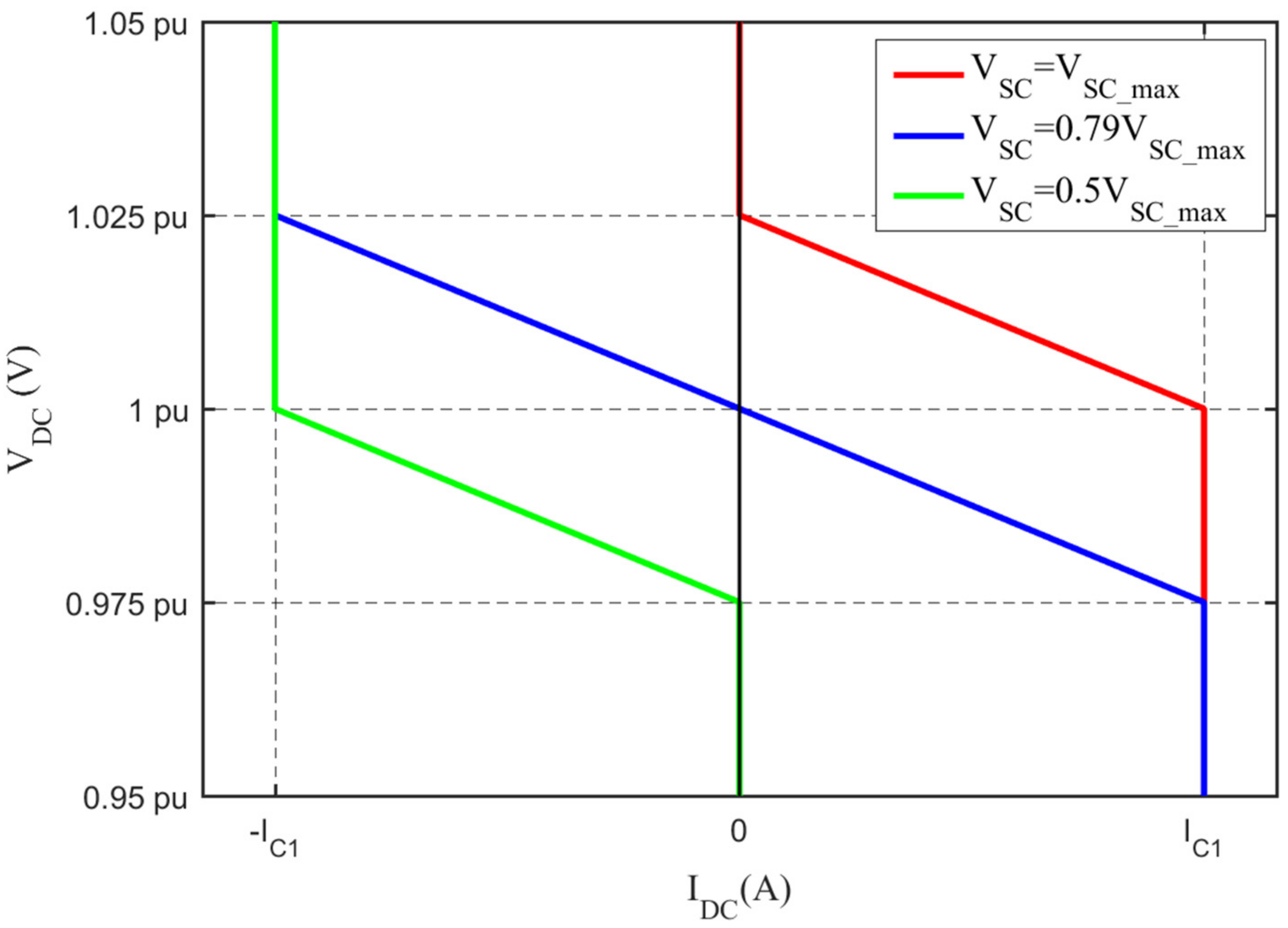
Figure 6 shows the dribbling supercapacitor I vs. V curve at supercapacitor voltages of 100%, 79%, and 50% of
VSC_max. The supercapacitor has a
VNL_SC = VNL_B = 1 pu at
VSC~79 % of
VSC_max (blue curve), and the supercapacitor contributes the same amount of power as the battery. When the supercapacitor has a voltage of 50% of
VSC_max, the threshold voltage is
VNL_SC = 0.975 pu (green curve).
Figure 2 shows that at 0.975 pu, the battery operates at the maximum discharging current and does not have a positive pulse current. Furthermore, when the threshold voltage is
VNL_SC = 1.025 pu, the supercapacitor stores the most energy (red curve).
Figure 2 shows that at 1.025 pu, the battery operates at the maximum charging current and does not have a negative pulse current.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}