
A Multi-Ray Channel Modelling Approach to Enhance UAV Communications in Networked Airspace





Abstract
1. Introduction
- A novel multi-ray channel model is proposed to capture the complexities of airspace networks accurately. This model applies to G2A and A2A communications and is utilized for channel characterization and performance analysis of these communication links.
- A method for determining the power received at the target UAV is presented. It integrates the reflective properties of UAV surfaces into the multi-ray channel model.
- This paper explores how key factors—like altitude, the number of UAVs, and spatial separation—affect the power the target UAV receives, offering essential insights into the dynamics of airspace networks.
- A thorough review of current research on networks of aerial vehicles in multipath settings is performed, accompanied by essential critique and commentary as needed.
2. Literature Review
2.1. Analytical and Simulation-Based Studies
2.2. Measurement-Based Studies
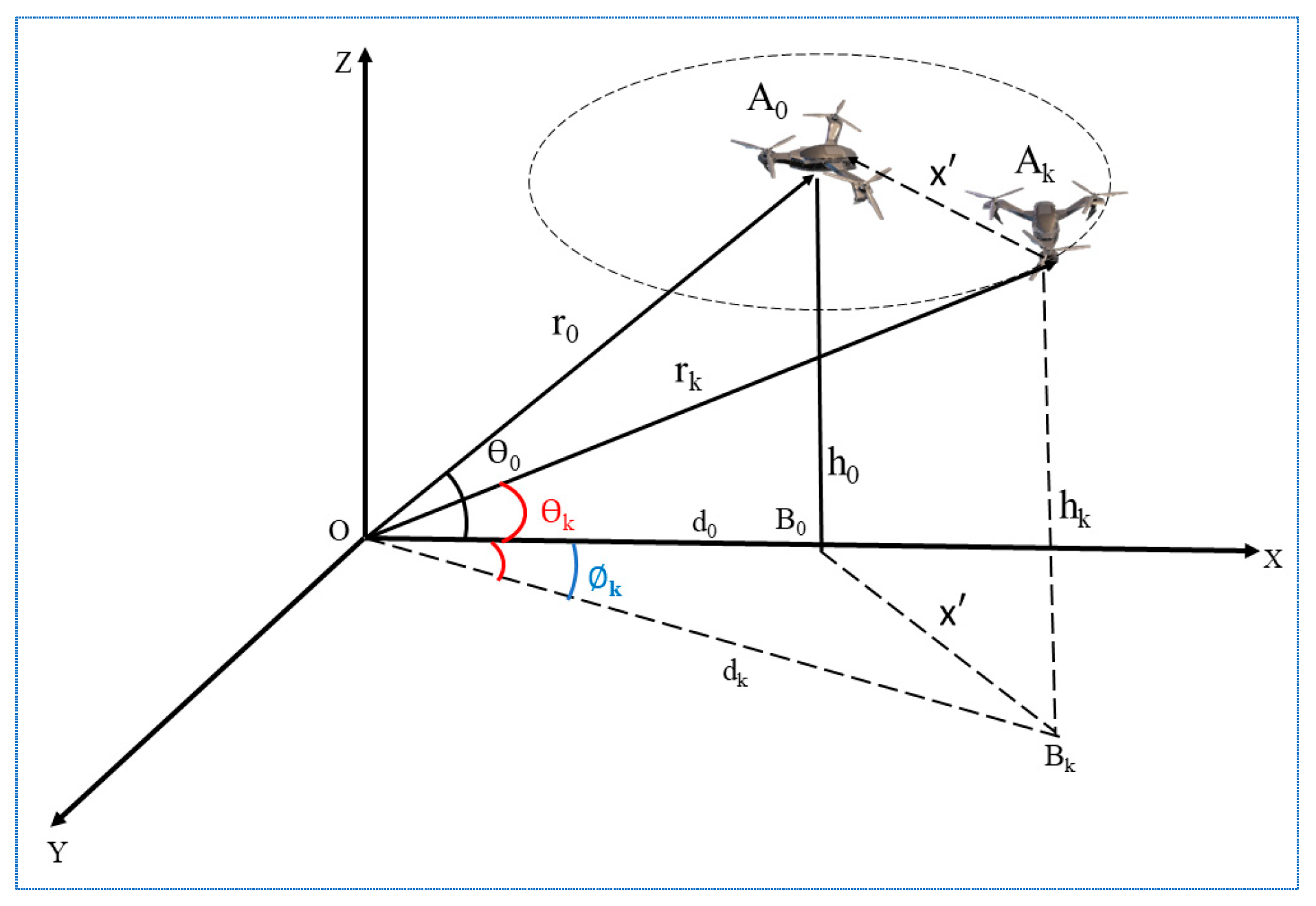
3. The Multi-Ray Channel Model
3.1. Problem Description and Assumptions
3.1.1. Problem Description
3.1.2. Assumptions
3.2. Description of the Multi-Ray Channel Model
3.2.1. Aerial Distance Between Intended UAV→GS
3.2.2. Distance Variations: Scatterer vs. Intended UAVs
3.2.3. Radio Wave Transmission
3.2.4. Time Delay Calculation
3.2.5. Path Difference Calculation
3.2.6. Power Equation for Multipath Reflected Rays
4. Model Development, Experiments, and Results
4.1. Impact Analysis of Various Factors on Received Power
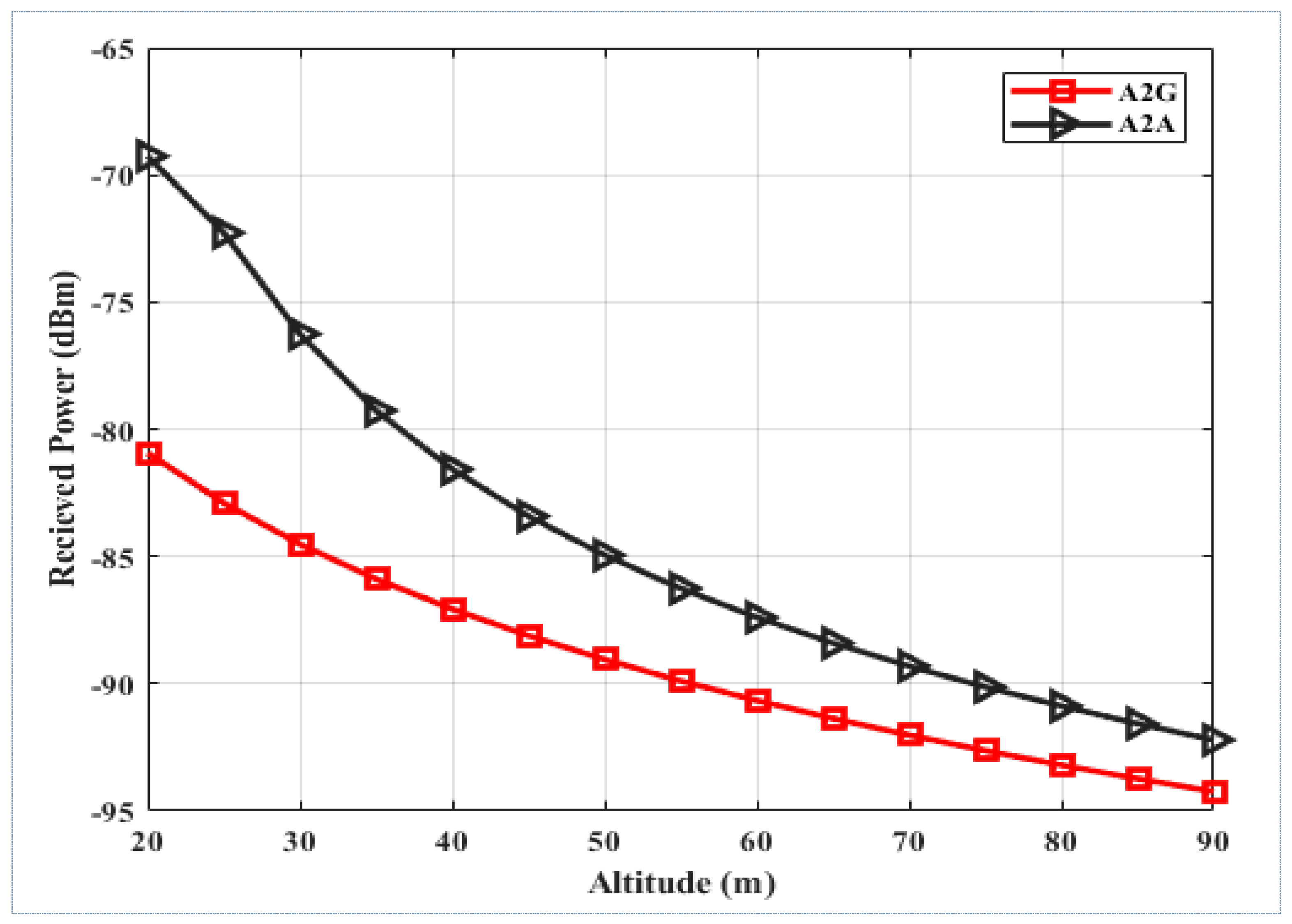
4.1.1. Altitude of the Receiver
4.1.2. Horizontal Flight of the Receiver
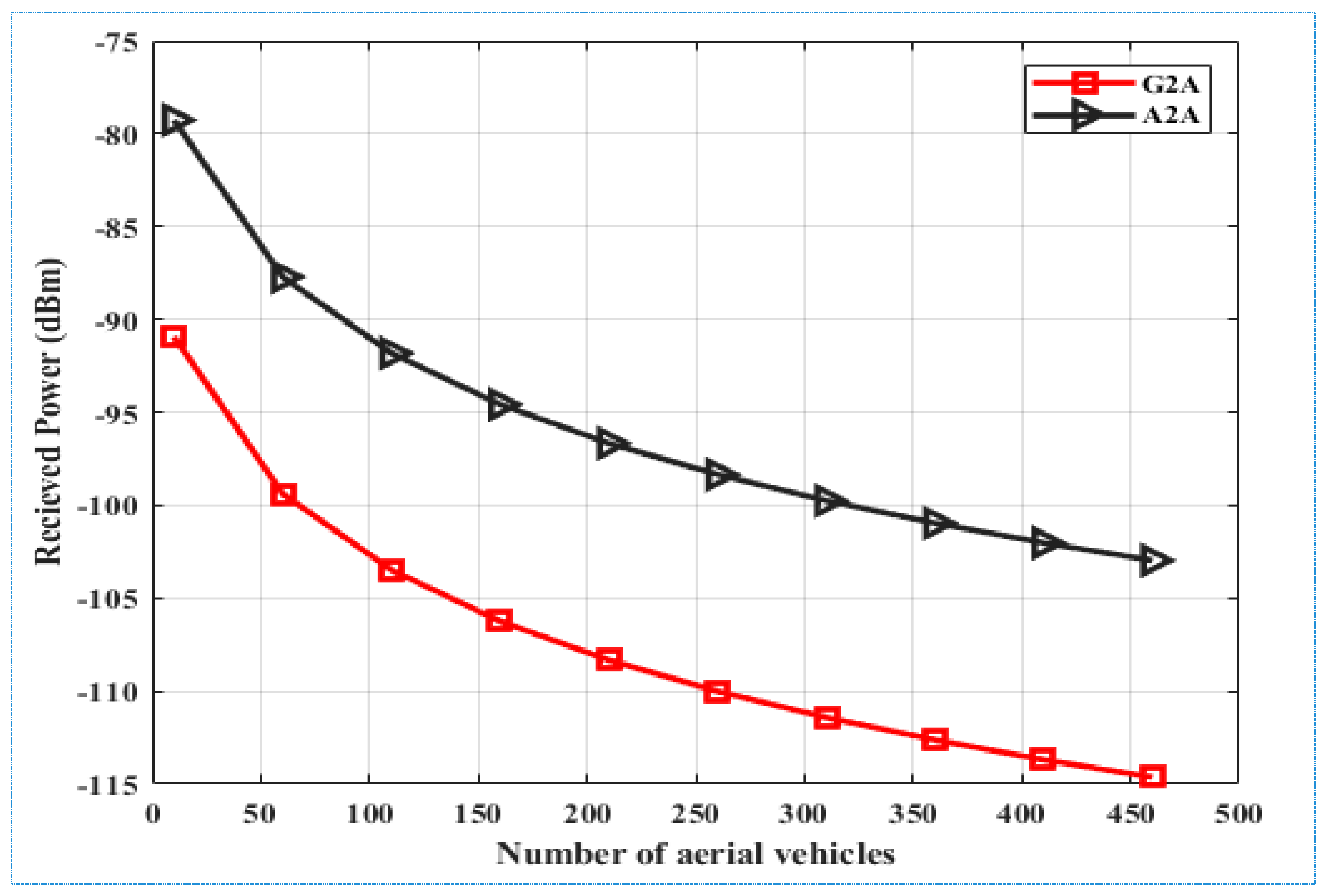
4.1.3. Increase in Number of Flying Vehicles
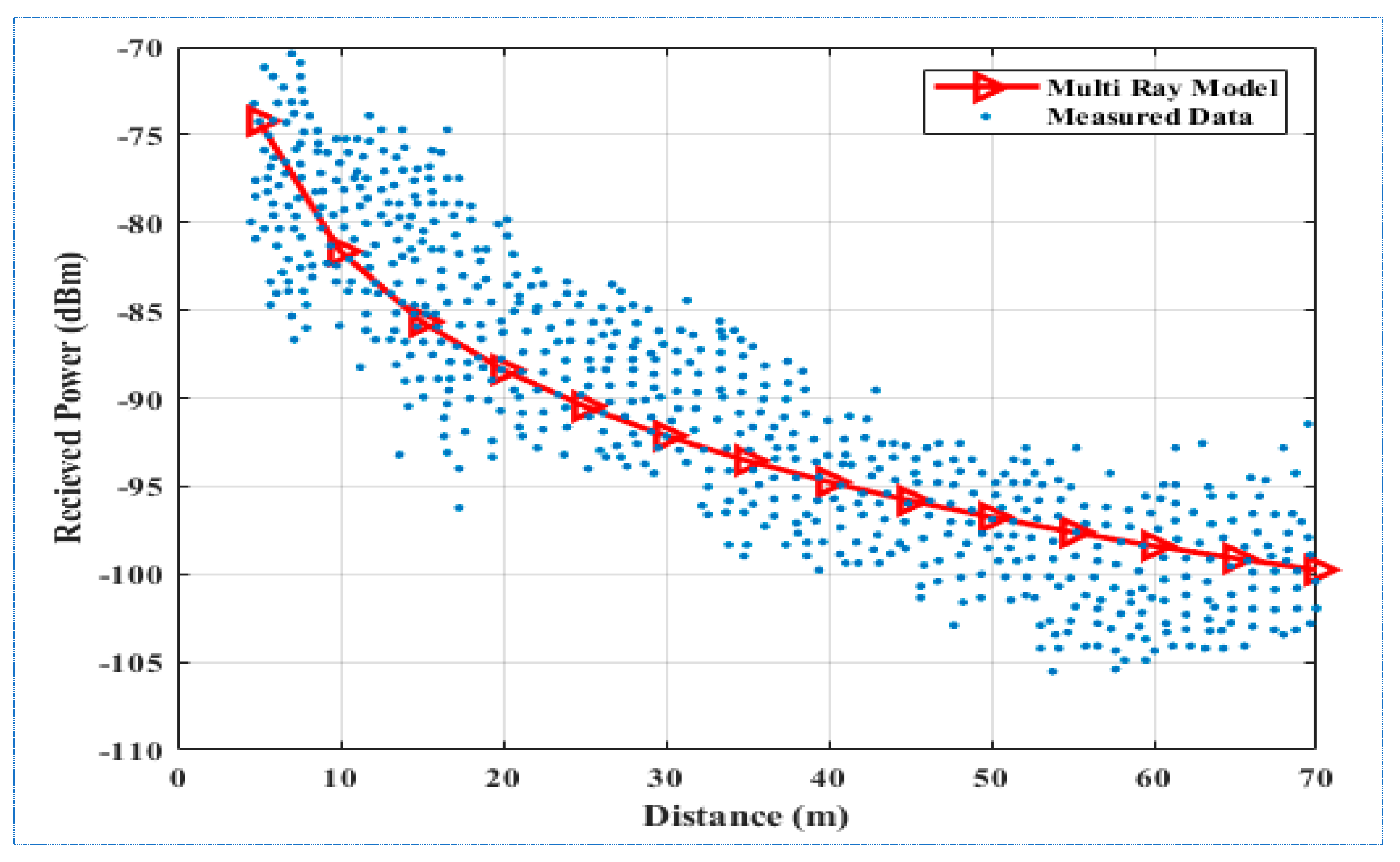
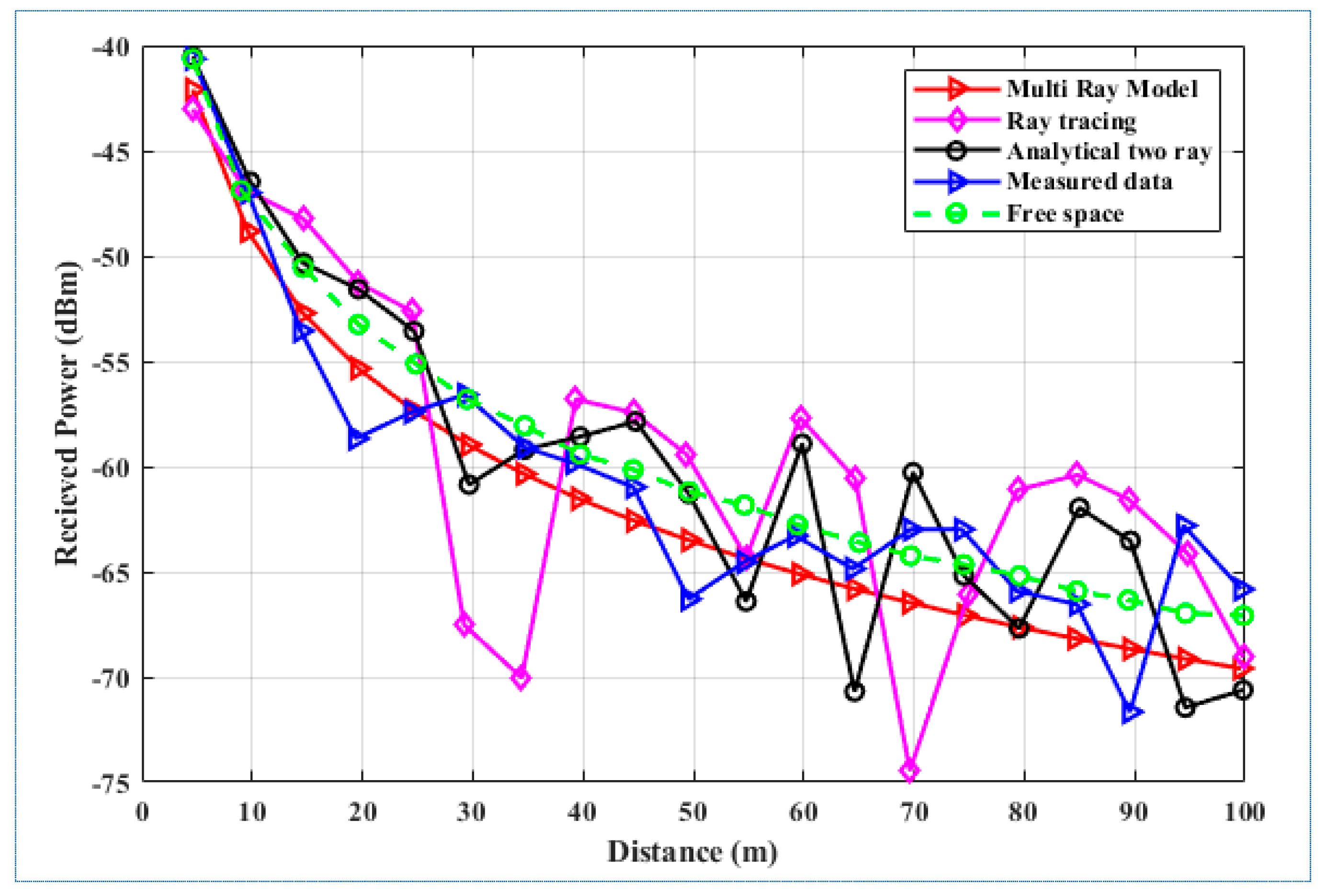
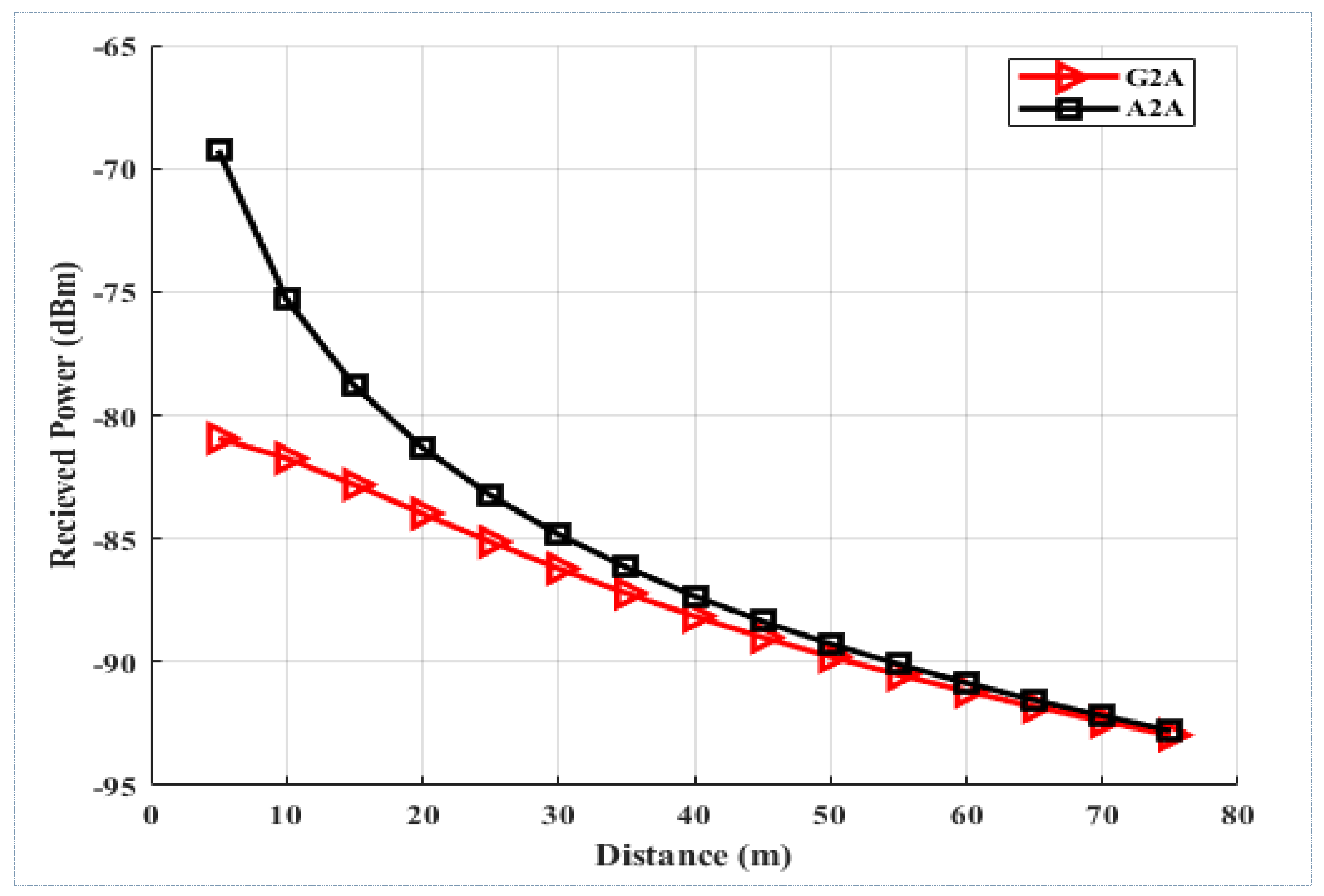
4.1.4. Increase in Propagation Distance
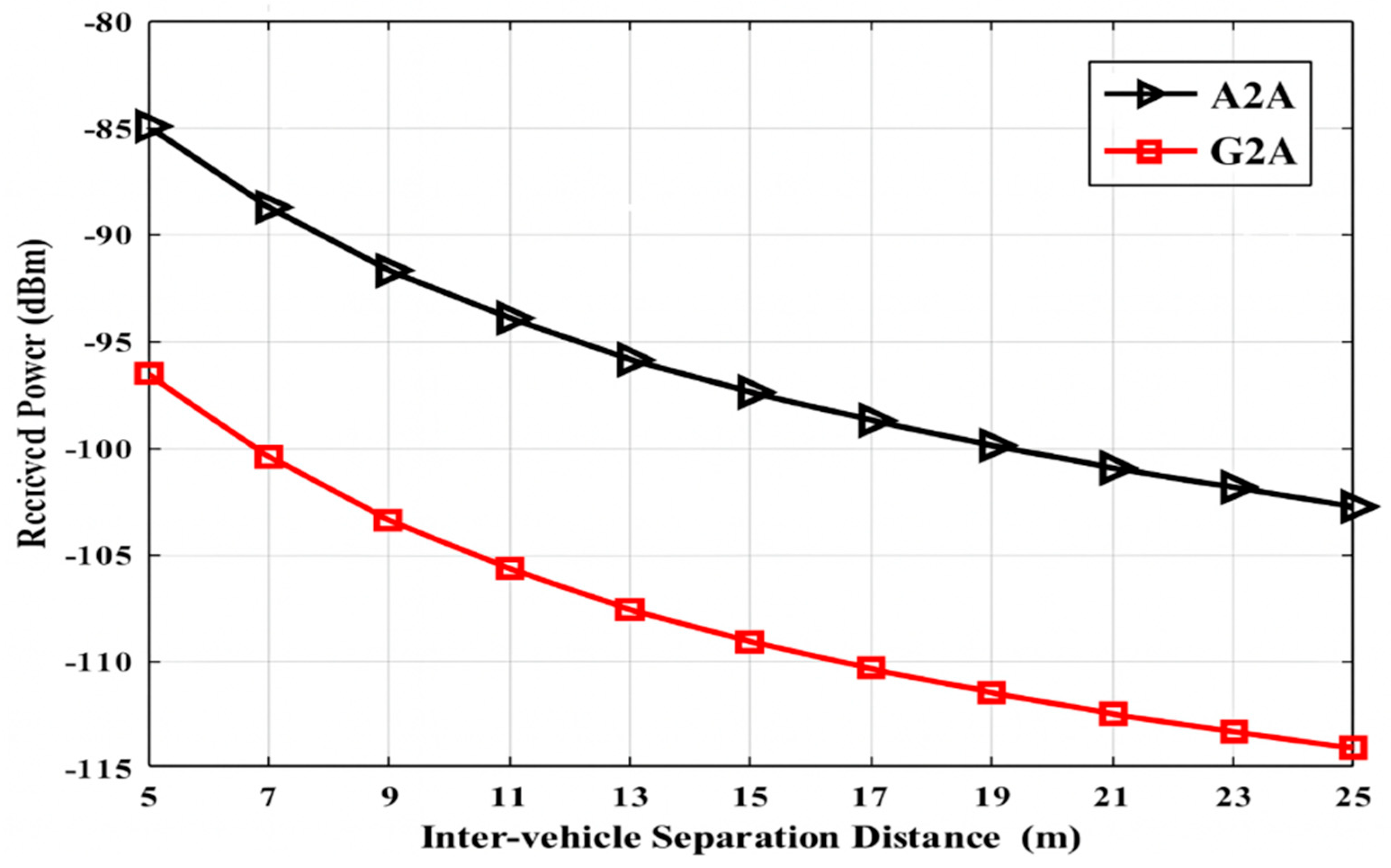
4.1.5. Increase in Inter-Vehicle Separation Distance
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jung, S.; Kim, H. Analysis of amazon prime air UAV delivery service. J. Knowl. Inf. Technol. Syst. 2017, 12, 253–266. [Google Scholar]
- Ling, A.H.M.; Sia, J.K.-M.; Ho, J.M. Investigating consumers’ intention to use drone food delivery services: Do personality traits matter? Asia Pac. J. Mark. Logist. 2024, 36, 3025–3042. [Google Scholar] [CrossRef]
- De Schrijver, S. Commercial use of drones: Commercial drones facing legal turbulence: Towards a new legal framework in the EU. US-China Rev. 2019, 16, 338. [Google Scholar] [CrossRef]
- Shenoy, K.K. From innovation to integration of drones in business ecosystem: Commercial and civilian drone opportunities and regulatory challenges. Int. J. Intellect. Prop. Manag. 2024, 14, 309–324. [Google Scholar] [CrossRef]
- Tasouji, Y. Lifting Off: Commercial Drone Services and Regulations in Canada. Master’s Thesis, Simon Fraser University, Burnaby, BC, Canada, 2023. [Google Scholar]
- ITU-R M.2160; Framework and Overall Objectives of the Future Development of IMT for 2030 and Beyond. International Telecommunication Union–Radiocommunication Sector (ITU-R): Geneva, Switzerland, 2023.
- Yan, C.; Fu, L.; Zhang, J.; Wang, J. A comprehensive survey on UAV communication channel modeling. IEEE Access. 2019, 7, 107769–107792. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.-S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surveys Tuts. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Zhang, Y.; Wen, J.; Yang, G.; He, Z.; Luo, X. Air-to-air path loss prediction based on Machine Learning methods in urban environments. Wirel. Commun. Mob. Comput. 2018, 2018, 8489326. [Google Scholar] [CrossRef]
- Colpaert, A.; Vinogradov, E.; Pollin, S. Aerial coverage analysis of cellular systems at LTE and mmWave frequencies using 3D city models. Sensors 2018, 18, 4311. [Google Scholar] [CrossRef]
- Greenberg, E.; Levy, P. Channel characteristics of UAV to ground links over multipath urban environments. In Proceedings of the 2017 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel Aviv, Israel, 13–15 November 2017; pp. 1–4. [Google Scholar]
- Zhu, L.; He, D.; Guan, K.; Ai, B.; Zhong, Z.; Li, D. Channel characterization and simulation for unmanned aerial vehicle communication. In Proceedings of the IEEE International Symposium on Antennas and Propagation and USNCURSI Radio Science Meeting, Atlanta, GA, USA, 7–12 July 2019; pp. 2135–2136. [Google Scholar]
- Athanasiadou, G.E.; Tsoulos, G.V. Path loss characteristics for UAV-to-ground wireless channels. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 5 April 2019; pp. 1–4. [Google Scholar]
- Chu, X.; Briso, C.; He, D.; Yin, X.; Dou, J. Channel modeling for low-altitude UAV in suburban environments based on ray tracer. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018. [Google Scholar]
- Zhao, D.; Huang, C.; Wang, C.X.; Li, J. Scenario Classification and Channel Modeling for MIMO Communications in Suburban Road Scenarios. In Proceedings of the 2024 18th European Conference on Antennas and Propagation (EuCAP), Glasgow, UK, 17–22 March 2024; pp. 1–5. [Google Scholar]
- Cui, Z.; Guan, K.; He, D.; Ai, B.; Zhong, Z. Propagation modeling for UAV air-to-ground channel over the simple mountain terrain. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Jawhly, T.; Tiwari, R.C. Loss exponent modeling for the hilly forested region in the VHF band III. Radio Sci. 2021, 56, e2020RS007201. [Google Scholar] [CrossRef]
- Andersen, J.B.; Rappaport, T.S.; Yoshida, S. Propagation measurements and models for wireless communications channels. IEEE Commun. Mag. 1995, 33, 42–49. [Google Scholar] [CrossRef]
- Cui, Z.; Guan, K.; Briso, C.; He, D.; Ai, B.; Zhong, Z. Probabilistic two-ray model for air-to-air channel in built-up areas. arXiv 2019, arXiv:1906.10909. [Google Scholar]
- Ranchagoda, N.H.; Sithamparanathan, K.; Ding, M.; Al-Hourani, A.; Gomez, K. Elevation-angle based two-ray path loss model for air-to-ground wireless channels. Veh. Commun. 2021, 32, 100393. [Google Scholar] [CrossRef]
- Faruque, S. A three ray propagation model for PCS and micro-cellular services. In Proceedings of the MILCOM’95, San Diego, CA, USA, 5–8 November 1995; pp. 1239–1243. [Google Scholar]
- He, R.; Zhong, Z.; Ai, B.; Ding, J.; Guan, K. Analysis of the relation between Fresnel zone and path loss exponent based on two-ray model. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 208–211. [Google Scholar]
- Matolak, D.W. Air-ground channels & models: Comprehensive review and considerations for unmanned aircraft systems. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–17. [Google Scholar]
- Gürses, A.; Sichitiu, M.L. Air-to-Ground Channel Modeling for UAVs in Rural Areas. In Proceedings of the 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), Washington, DC, USA, 7–10 October 2024; pp. 1–6. [Google Scholar]
- Matolak, D.W.; Sun, R. Air-ground channel characterization for unmanned aircraft systems: The hilly suburban environment. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5. [Google Scholar]
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706. [Google Scholar] [CrossRef]
- Zöchmann, E.; Guan, K.; Rupp, M. Two-ray models in mmWave communications. In Proceedings of the 2017 IEEE 18th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Sapporo, Japan, 3–6 July 2017; pp. 1–5. [Google Scholar]
- Dabiri, M.T.; Safi, H.; Parsaeefard, S.; Saad, W. Analytical channel models for millimeter wave UAV networks under hovering fluctuations. IEEE Trans. Wirel. Commun. 2020, 19, 2868–2883. [Google Scholar] [CrossRef]
- Djimantoro, M.I.; Suhardjanto, G. The advantage by using low-altitude UAV for sustainable urban development control. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Qingdao, China, 26–29 June 2017; p. 012014. [Google Scholar]
- Parsons, J.D.; Parsons, P.J.D. The Mobile Radio Propagation Channel; Wiley: New York, NY, USA, 2000; Volume 2. [Google Scholar]
- Macharia, R.; Lang’at, K.; Kihato, P. Interference management upon collaborative beamforming in a wireless sensor network monitoring system featuring multiple unmanned aerial vehicles. In Proceedings of the 2021 IEEE AFRICON, Arusha, Tanzania, 13–15 September 2021; pp. 1–6. [Google Scholar]
- Mirza, M.-Y.; Khan, N. Correction to: G2a communication channel modeling and characterization using confocal prolates. Wirel. Pers. Commun. 2020, 115, 11. [Google Scholar] [CrossRef]
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in public safety communications: Energy efficiency perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Hadi, H.J.; Cao, Y.; Nisa, K.U.; Jamil, A.M.; Ni, Q. A comprehensive survey on security, privacy issues and emerging defence technologies for UAVs. J. Netw. Comput. Appl. 2023, 213, 103607. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, Texas, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar]
- Ahmad, A.; Cheema, A.A.; Finlay, D. A survey of radio propagation channel modelling for low altitude flying base stations. Comput. Netw. 2020, 171, 107122. [Google Scholar] [CrossRef]
- Kim, E.; Kim, J.; Kim, J.-H.; Lee, H. HiMAQ: Hierarchical multi-agent Q-learning-based throughput and fairness improvement for UAV-Aided IoT networks. J. Netw. Comput. Appl. 2024, 223, 103813. [Google Scholar] [CrossRef]
- Tuna, G.; Nefzi, B.; Conte, G. Unmanned aerial vehicle-aided communications system for disaster recovery. J. Netw. Comput. Appl. 2014, 41, 27–36. [Google Scholar] [CrossRef]
- Cui, Z.; Briso, C.; Guan, K.; Matolak, D.W.; Calvo-Ramírez, C.; Ai, B.; Zhong, Z. Low-altitude UAV air-ground propagation channel measurement and analysis in a suburban environment at 3.9 GHz. IET Microw. Antennas Propag. 2019, 13, 1503–1508. [Google Scholar] [CrossRef]
- Zhu, Q.; Jiang, S.; Wang, C.-X.; Hua, B.; Mao, K.; Chen, X.; Zhong, W. Effects of digital map on the RT-based channel model for UAV mmWave communications. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 1648–1653. [Google Scholar]
- Zhu, Q.; Yao, M.; Bai, F.; Chen, X.; Zhong, W.; Hua, B.; Ye, X. A general altitude-dependent path loss model for UAV-to-ground millimeter-wave communications. Front. Inf. Technol. Electron. Eng. 2021, 22, 767–776. [Google Scholar] [CrossRef]
- Pang, M.; Zhu, Q.; Lin, Z.; Bai, F.; Tian, Y.; Li, Z.; Chen, X. Machine learning based altitude-dependent empirical LoS probability model for air-to-ground communications. Front. Inf. Technol. Electron. Eng. 2022, 23, 1378–1389. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Alsamhi, S.H.; Hawbani, A. Multi-UAV and SAR collaboration model for disaster management in B5G networks. Internet Technol. Lett. 2024, 7, e310. [Google Scholar] [CrossRef]
- Mohammed, I.; Collings, I.B.; Hanly, S.V. Line of sight probability prediction for UAV communication. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, Canada, 14–18 June 2021; pp. 1–6. [Google Scholar]
- Vásárhelyi, G.; Virágh, C.; Somorjai, G.; Nepusz, T.; Eiben, A.E.; Vicsek, T. Optimized flocking of autonomous drones in confined environments. Sci. Robot. 2018, 3, eaat3536. [Google Scholar] [CrossRef]
- Pang, M.; Zhu, Q.; Bai, F.; Li, Z.; Li, H.; Mao, K.; Tian, Y. Height-Dependent LoS Probability Model for A2G MmWave Communications Under Built-Up Scenarios. In Proceedings of the International Conference in Communications, Signal Processing, and Systems, Chengdu, China, 26–28 February 2021; pp. 1209–1217. [Google Scholar]
- Lee, S.; Kim, T.; Kim, M.; Kim, D. Simultaneous control algorithm for mobile manipulator using MMPPE. In Proceedings of the 2021 International Conference on Electronics, Information, and Communication (ICEIC), Jeju, Republic of Korea, 31 January–3 February 2021; pp. 1–3. [Google Scholar]
- Rasmussen, S.J.; Mitchell, J.W.; Chandler, P.R.; Schumacher, C.J.; Smith, A.L. Introduction to the MultiUAV2 simulation and its application to cooperative control research. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 4490–4501. [Google Scholar]
- Wu, W.; Huang, Z.; Shan, F.; Bian, Y.; Lu, K.; Li, Z.; Wang, J. CoUAV: A cooperative UAV fleet control and monitoring platform. arXiv 2019, arXiv:190404046. [Google Scholar]
- Sciancalepore, S.; Alhazbi, S.; di Pietro, R. Receivers location privacy in avionic crowdsourced networks: Issues and countermeasures. J. Netw. Comput. Appl. 2021, 174, 102892. [Google Scholar] [CrossRef]
- Asaamoning, G.; Mendes, P.; Rosário, D.; Cerqueira, E. Drone swarms as networked control systems by integration of networking and computing. Sensors 2021, 21, 2642. [Google Scholar] [CrossRef]
- Medeiros, I.; Boukerche, A.; Cerqueira, E. Swarm-based and energy-aware unmanned aerial vehicle system for video delivery of mobile objects. IEEE Trans. Veh. Technol. 2021, 71, 766–779. [Google Scholar] [CrossRef]
- Greenberg, E.; Klodzh, E. Over-the-City UAVs Swarm Communications Channel Model. In Proceedings of the 2019 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel-Aviv, Israel, 4–9 November 2019; pp. 1–5. [Google Scholar]
- Khan, M.R.; Mahapatra, S.; Das, B. UWB Saleh–Valenzuela model for underwater acoustic sensor network. Int. J. Inf. Technol. 2020, 12, 1073–1083. [Google Scholar] [CrossRef]
- Cai, X.; Izydorczyk, T.; Rodríguez-Piñeiro, J.; Kovács, I.Z.; Wigard, J.; Tavares, F.M.; Mogensen, P.E. Empirical low-altitude air-to-ground spatial channel characterization for cellular networks connectivity. IEEE J. Sel. Areas Commun. 2021, 39, 2975–2991. [Google Scholar] [CrossRef]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.-L.; Bergstrom, M.; Euler, S.; Wang, Y.-P.E. The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef]
- Khawaja, W.; Ozdemir, O.; Guvenc, I. UAV air-to-ground channel characterization for mmWave systems. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Lyu, Y.; Wang, W.; Sun, Y.; Rashdan, I. Measurement-based fading characteristics analysis and modeling of UAV to vehicles channel. Veh. Commun. 2024, 45, 100707. [Google Scholar] [CrossRef]
- Alobaidy, H.A.; Singh, M.J.; Behjati, M.; Nordin, R.; Abdullah, N.F. Wireless Transmissions, Propagation and Channel Modelling for IoT Technologies: Applications and Challenges. IEEE Access 2022, 10, 24095–24131. [Google Scholar] [CrossRef]
- Wang, C.-X.; Huang, J.; Wang, H.; Gao, X.; You, X.; Hao, Y. 6G Wireless Channel Measurements and Models: Trends and Challenges. IEEE Veh. Technol. Mag. 2020, 15, 22–32. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, L.; Zhao, G.; Zhou, S. Channel model in the urban environment for unmanned aerial vehicle communications. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018; pp. 1–5. [Google Scholar]
- Matolak, D.W.; Sun, R. Air-ground channel characterization for unmanned aircraft systems: The near-urban environment. In Proceedings of the 2015 IEEE Military Communications Conference (MILCOM 2015), Tampa, FL, USA, 26–28 October 2015; pp. 1656–1660. [Google Scholar]
- Bianco, T.; Palmieri, N.; Ganazhapa, A.F. Channel analysis in a realistic path loss model for drones support in wireless communications. In Proceedings of the SPIE 11758, Unmanned Systems Technology XXIII, 117580J, Online Only, 8 June 2021. [Google Scholar]
- Vinogradov, E.; Sallouha, H.; De Bast, S.; Azari, M.M.; Pollin, S. Tutorial on UAV: A blue-sky view on wireless communication. arXiv 2019, arXiv:1901.02306. [Google Scholar]
- Zhang, R.; Guo, Q.; Zhai, D.; Zhou, D.; Du, X.; Guizani, M. Channel Measurement and Resource Allocation Scheme for Dual-Band Airborne Access Networks. IEEE Access 2019, 7, 80870–80883. [Google Scholar] [CrossRef]
- Qiu, Z.; Chu, X.; Calvo-Ramirez, C.; Briso, C.; Yin, X. Low altitude UAV air-to-ground channel measurement and modeling in Semiurban environments. Wirel. Commun. Mob. Comput. 2017, 2017, 1587412. [Google Scholar] [CrossRef]
- Shi, Y.; Enami, R.; Wensowitch, J.; Camp, J. Measurement-based characterization of LOS and NLOS drone-to-ground channels. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Cui, Z.; Briso-Rodríguez, C.; Guan, K.; Calvo-Ramírez, C.; Ai, B.; Zhong, Z. Measurement-based modeling and analysis of UAV air-ground channels at 1 and 4 GHz. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1804–1808. [Google Scholar] [CrossRef]
- Khawaja, W.; Ozdemir, O.; Erden, F.; Guvenc, I.; Matolak, D.W. Ultra-wideband air-to-ground propagation channel characterization in an open area. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4533–4555. [Google Scholar] [CrossRef] [PubMed]
- Cui, Z.; Briso-Rodriguez, C.; Guan, K.; Zhong, Z.; Quitin, F. Multifrequency air-to-ground channel measurements and analysis for uav communication systems. IEEE Access 2020, 8, 110565–110574. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, Z.; Wang, C.-X.; Zhang, J.; Dang, J.; Wu, L.; Zhang, H. A novel 3D UAV channel model for A2G communication environments using AoD and AoA estimation algorithms. IEEE Trans. Commun. 2020, 68, 7232–7246. [Google Scholar] [CrossRef]
- Fuschini, F.; Barbiroli, M.; Vitucci, E.M.; Semkin, V.; Oestges, C.; Strano, B.; Degli-Esposti, V. An UAV-based experimental setup for propagation characterization in urban environment. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, R.; Li, B.; Tang, X.; Wang, D. Angular spread analysis and modeling of UAV air-to-ground channels at 3.5 GHz. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–5. [Google Scholar]
- Bithas, P.S.; Nikolaidis, V.; Kanatas, A.G.; Karagiannidis, G.K. UAV-to-ground communications: Channel modeling and UAV selection. IEEE Trans. Commun. 2020, 68, 5135–5144. [Google Scholar] [CrossRef]
- Rodríguez-Piñeiro, J.; Domínguez-Bolaño, T.; Cai, X.; Huang, Z.; Yin, X. Air-to-ground channel characterization for low-height UAVs in realistic network deployments. IEEE Trans. Antennas Propag. 2020, 69, 992–1006. [Google Scholar] [CrossRef]
- Supramongkonset, J.; Duangsuwan, S.; Maw, M.M.; Promwong, S. Empirical Path Loss Channel Characterization Based on Air-to-Air Ground Reflection Channel Modeling for UAV-Enabled Wireless Communications. Wirel. Commun. Mob. Comput. 2021, 2021, 5589487. [Google Scholar] [CrossRef]
- Jeong, H.; Suk, J.; Kim, S.; Lee, Y.-G.; Cho, T.; Jeong, J. Aerodynamic Modeling and Verification of Quadrotor UAV Using Wind-Tunnel Test. Int. J. Aeronaut. Space Sci. 2024, 25, 809–835. [Google Scholar] [CrossRef]
- Jeong, K.; Yu, C.; Lee, D.; Kim, S. A Computational Model for Simulating the Performance of UAS-Based Construction Safety Inspection through a System Approach. Drones 2023, 7, 696. [Google Scholar] [CrossRef]
- Haris, M. Study of RCS Simulation Tools and Functional Enhancement of Physical Optics Facet (Pofacets c 4.2) Software Package for RCS Computations. 2021. Available online: https://www.scribd.com/document/528947269/Muhammad-Haris-MEE173017 (accessed on 23 June 2025).
- Jeong, W.H.; Choi, H.R.; Kim, K.S. Empirical path-loss modeling and a RF detection scheme for various drones. Wirel. Commun. Mob. Comput. 2018, 2018, 6795931. [Google Scholar] [CrossRef]
- Khawaja, W.; Ozdemir, O.; Erden, F.; Ozturk, E.; Guvenc, I. Multiple ray received power modelling for mmWave indoor and outdoor scenarios. IET Microw. Antennas Propagation 2020, 14, 1825–1836. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Scenario | Frequency | Tx-Rx Separation | Simulated Parameter | Tx Power | Bandwidth | Limitation |
|---|---|---|---|---|---|---|---|
| Greenberg et al. [11], 2017 | Urban | 2.4 GHz | - | Received power Delay spread | - | - | Limited number of reflected rays. Only a single UAV is considered. |
| Zhu et al. [12], 2019 | Urban | 2.2 GHz | 5 km | Path loss | 40 dB | 20 MHz | Received power is not investigated. |
| Chu et al. [14], 2018 | Sub-Urban | 4.2 GHz 1.2 GHz | 0–100 m | Received power RMS Delay K factor | 15 dBm | 100 MHz | The scattering phenomenon is ignored. |
| Cui et al. [16], 2019 | Mountain Terrain | 2.4 GHz | 100 m | Path loss | - | - | LoS condition only. Assumed the path length of the reflected and LoS components is the same. |
| Ranchagoda, et al. [20], 2021 | Urban | 700 MHz | 1 km | Received power | 0 dBm | - | Only a single reflected ray is considered. |
| Mirza et al. [32], 2020 | Urban | 2.4 GHz | - | Received power | - | - | Not valid for multi-altitude G2A multipaths geometry. |
| Pang, M et al. [46], 2021 | Built up | 28 GHz | 0–1000 m | Los Probability | - | 500 MHz | Received power is not estimated. Only LoS link. |
| Greenberg et al. [53], 2019 | Urban | 2.4 GHz | 1 km | Path loss | - | - | Same Tx and Rx height. |
| Lin et al. [56], 2018 | Rural | 700 MHz | - | Path gain Los probability | - | 10 MHz | No close-in expression. |
| Khawaja et al. [57], 2017 | Urban Suburban Rural Oversea | 28 GHz 60 GHz | 2 km | Received power RMS-DS | 30 dBm | - | No close in expression. |
| References | Scenario | Frequency | Bandwidth | Tx Power | Tx Height | Rx Height | Measured Parameters | Limitation |
|---|---|---|---|---|---|---|---|---|
| Yang et al. [61], 2018 | Urban | 2.4 GHz | 20 MHz | 15 dBm | 5–80 m | 1 m | Pathloss RMS delay spread | Channel impulse response is recorded in a LoS situation only. |
| Matolak et al. [62], 2015 | Near Urban | 970 MHz and 5 GHz | 5 MHz | 10 Watts | 20 m | 1.4 m | Path loss RMS-DS | Altitude was not assessed. |
| R. Zhang et al. [65], 2019 | Rural Urban Sub-urban | 5060 MHz | 20 MHz | 46 dBm | 50 to 950 m | - | Pathloss Data rate | Limited to high altitudes and large-scale fading. Not for a small UAV. |
| Qiu et al. [66], 2017 | Open suburban | 2.4 GHz | - | 3 dB | 0–100 m | 1.5 m | Received Power Pathloss Small Scale Fading | Limited to open areas and low altitudes. |
| Y. Shi et al. [67], 2018 | Los Treebased NLoS | 900 MHz, 1800 MHz, 5 GHz | 20 MHz | - | 10 to 30 m | 1 m | Path loss | The environment consists only of trees. No other obstacles like building, etc. |
| Cui et al. [68], 2019 | Open field | 1 GHz 4 GHz | - | 30 dBm | 0–24 m | 25 m | Pathloss Correlation | Measurements are performed only for low altitudes. |
| Cui et al. [70], 2020 | Semi urban | 1,4, 12, 24 GHz | - | 30 dBm | 25 m | 0–24 m | Path loss | Low altitude of Tx and Rx. |
| Wang et al. [73], 2019 | RMa and LoS | 3.5 Hz | 10 dBm | 500 to 300 m | 1.5 m | - | Analyzed Multipath Components | Received power is not investigated. |
| Rodríguez et al. [75], 2020 | Sub urban | 2.5 GHz | 15.36 MHz | 40 dBm | 15 m | 25–105 m | Received RMS-DS, K-factor | The number of MPCs was limited to a fixed value. |
| Khwaja et al. [69] | Open field area | 3.1 GHz 4.8 GHz | 1.7 GHz | - | 1.5 m | 10, 20, 30 m | Pathloss RMS-DS | - |
| Supramongkonset et al. [76], 2021 | Rubber, Glass, and Soil Floor | 2.4 GHz, 868 MHz | - | 20 dBm | 1 m | 1–10 m | Path loss | A single reflected ray was considered. |
| Parameter | Settings |
|---|---|
| The number of scatterer UAVs | 200 |
| The number of intended UAVs | 1 |
| The transmitter height for A2A | 20 m |
| The transmitter height for G2A | 1.7 m |
| Safe separation distance between UAVs | 3 m |
| Carrier frequency | 2.4 GHz |
| Transmit power | −22.14 dBm |
| Tx Antenna gain | 3.9 dBi |
| Rx Antenna gain | 3 dBi |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, F.; Mirza, M.Y.M.; Hussain, I.; Arshid, K. A Multi-Ray Channel Modelling Approach to Enhance UAV Communications in Networked Airspace. Inventions 2025, 10, 51. https://doi.org/10.3390/inventions10040051
Ahmad F, Mirza MYM, Hussain I, Arshid K. A Multi-Ray Channel Modelling Approach to Enhance UAV Communications in Networked Airspace. Inventions. 2025; 10(4):51. https://doi.org/10.3390/inventions10040051
Chicago/Turabian StyleAhmad, Fawad, Muhammad Yasir Masood Mirza, Iftikhar Hussain, and Kaleem Arshid. 2025. "A Multi-Ray Channel Modelling Approach to Enhance UAV Communications in Networked Airspace" Inventions 10, no. 4: 51. https://doi.org/10.3390/inventions10040051
APA StyleAhmad, F., Mirza, M. Y. M., Hussain, I., & Arshid, K. (2025). A Multi-Ray Channel Modelling Approach to Enhance UAV Communications in Networked Airspace. Inventions, 10(4), 51. https://doi.org/10.3390/inventions10040051