
Seahorse-Tail-Inspired Soft Pneumatic Actuator: Development and Experimental Characterization




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- The design and fabrication of an actuator pneumatically powered and inspired by the Hippocampus reidi;
- The methodology to achieve an integration between skeleton and epithelial tissue, as for several biological structures in nature;
- A complete characterization of the designed SPA.
2. Mechanical Design of the Bio-Inspired Actuator
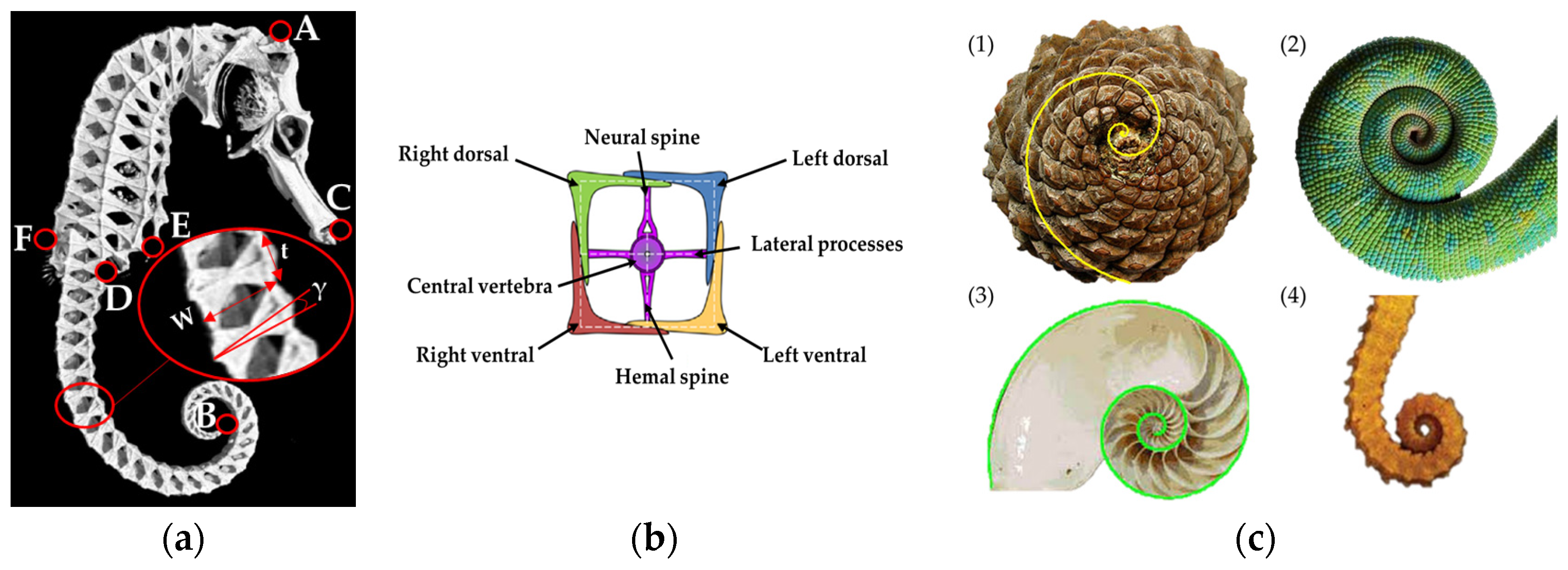
2.1. The Studied Species: Hippocampus reidi
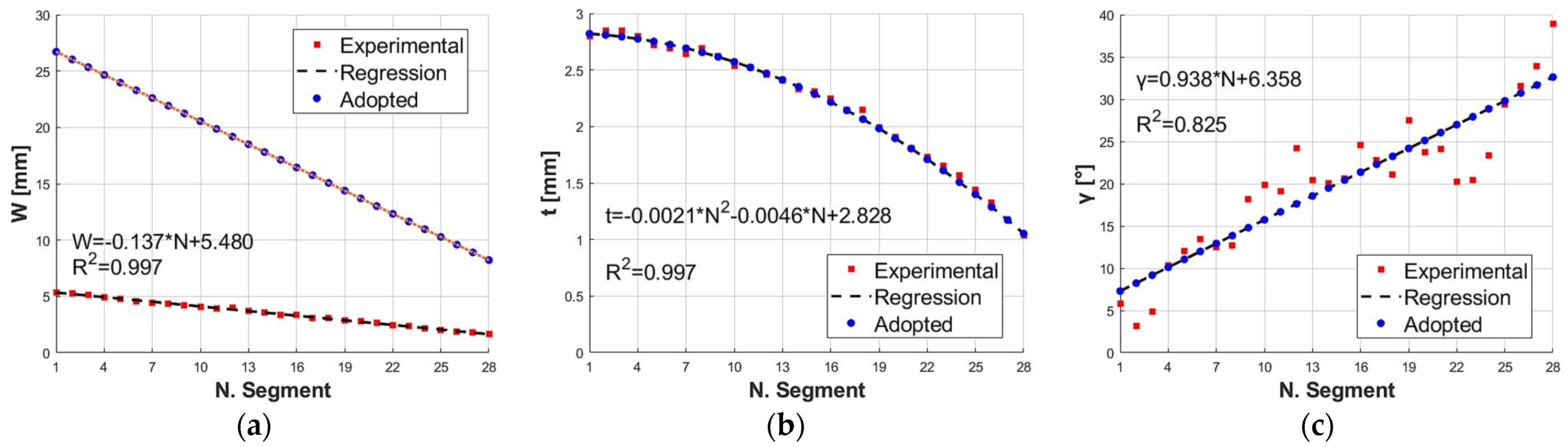
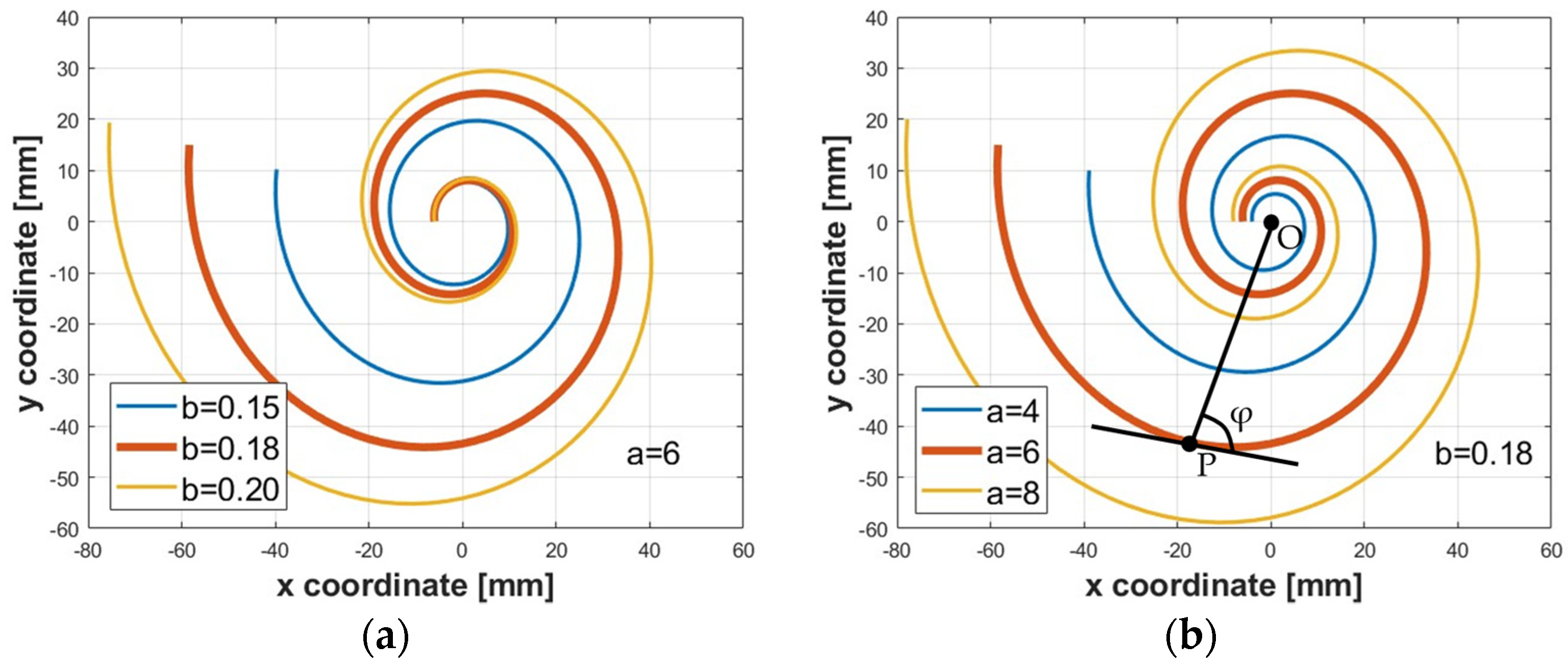
2.2. Characteristic Dimensions of the Actuator
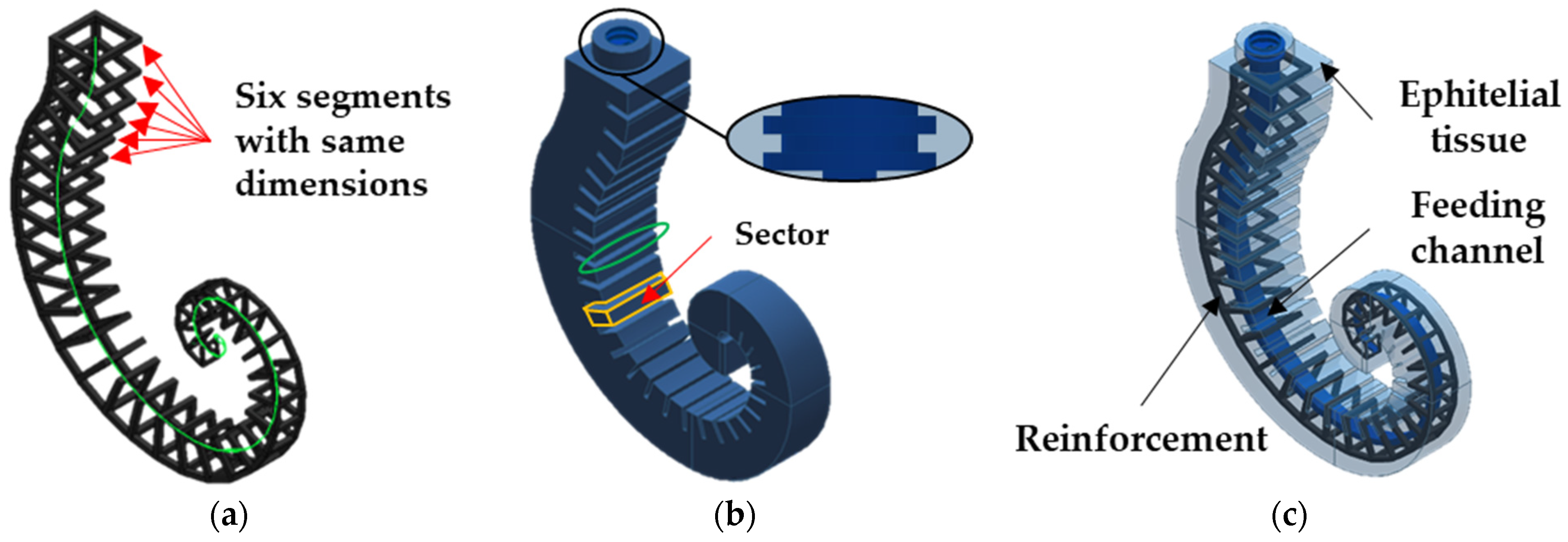
2.3. CAD Model of the SPA
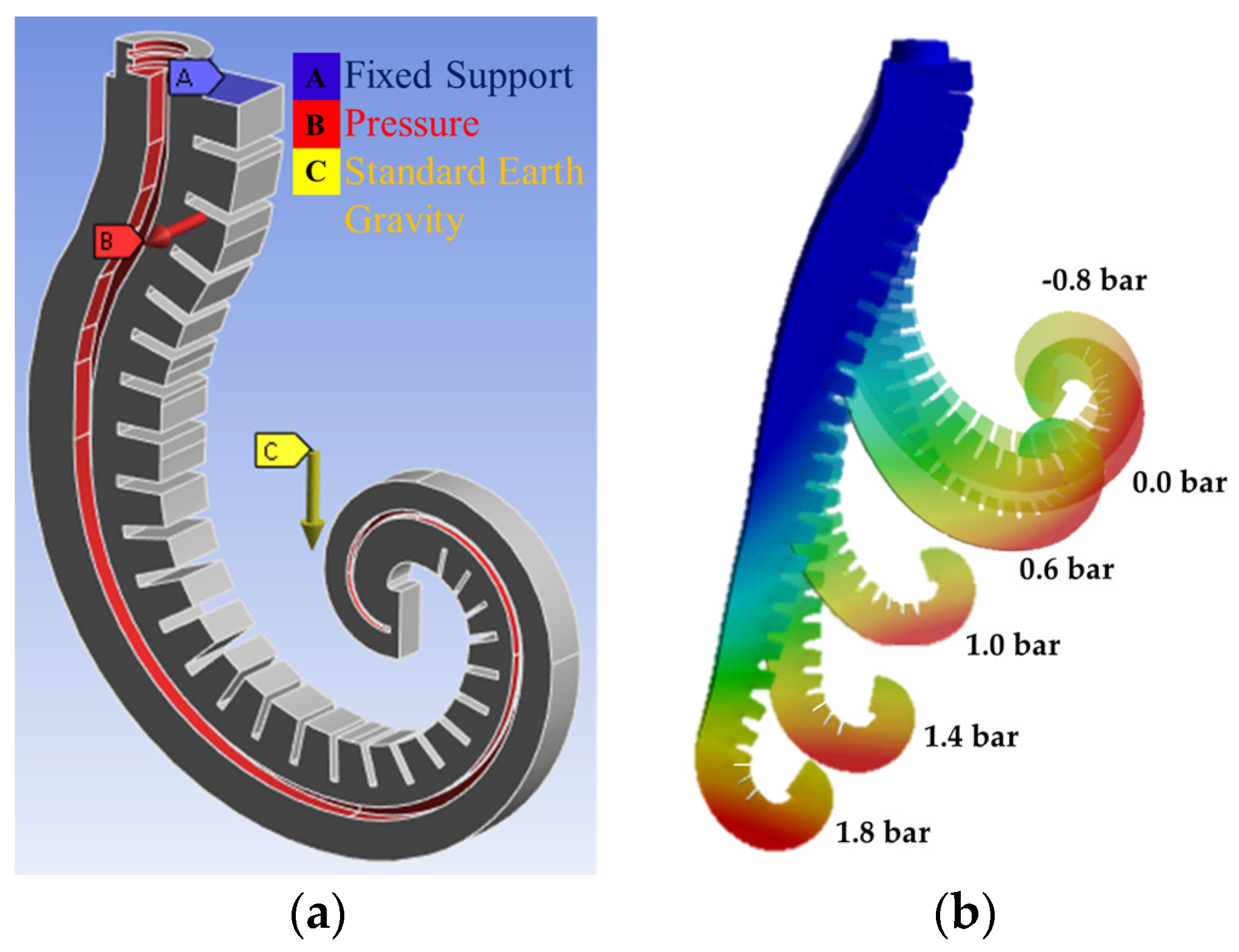
2.4. The Numerical Model
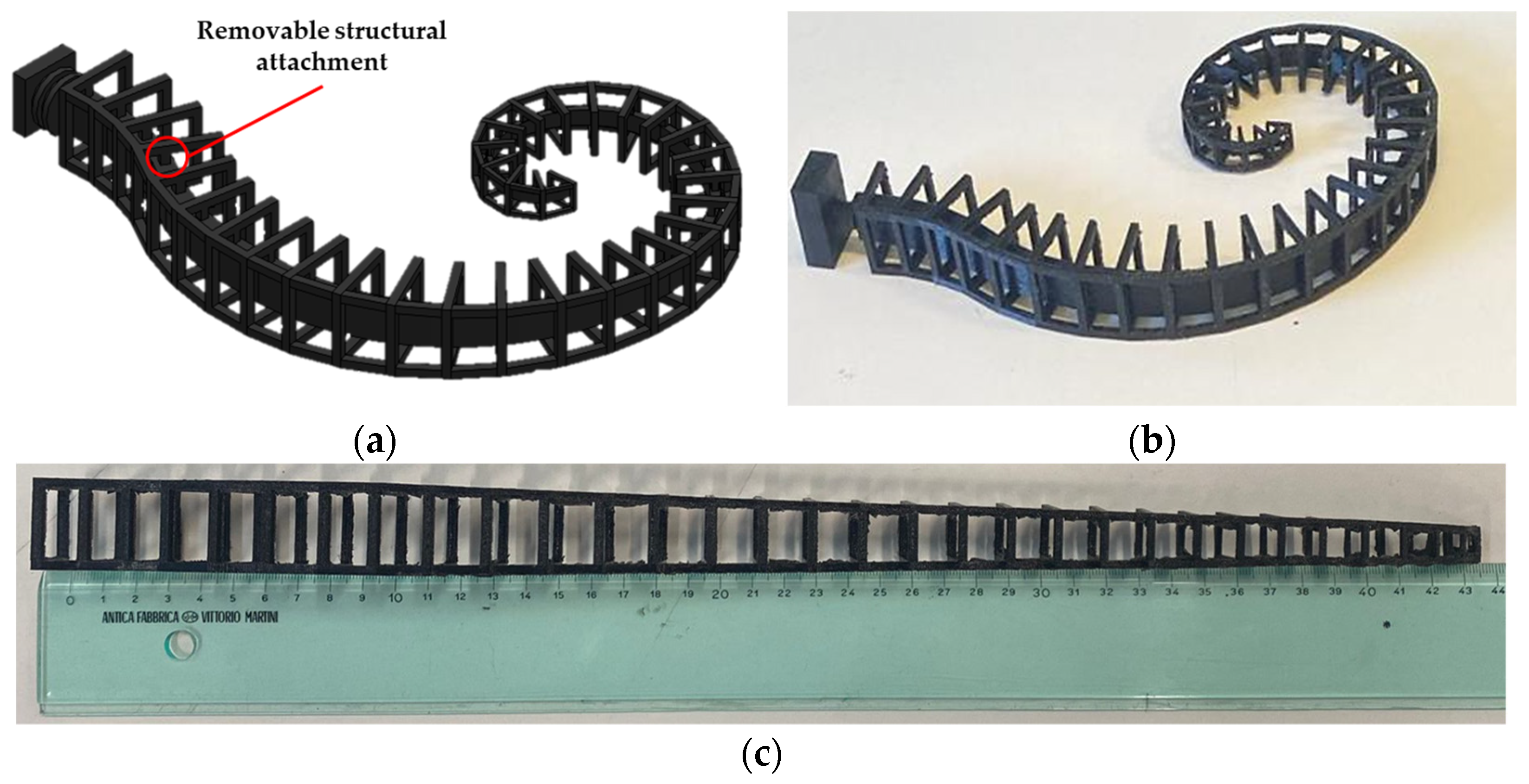
3. The Prototype
- -
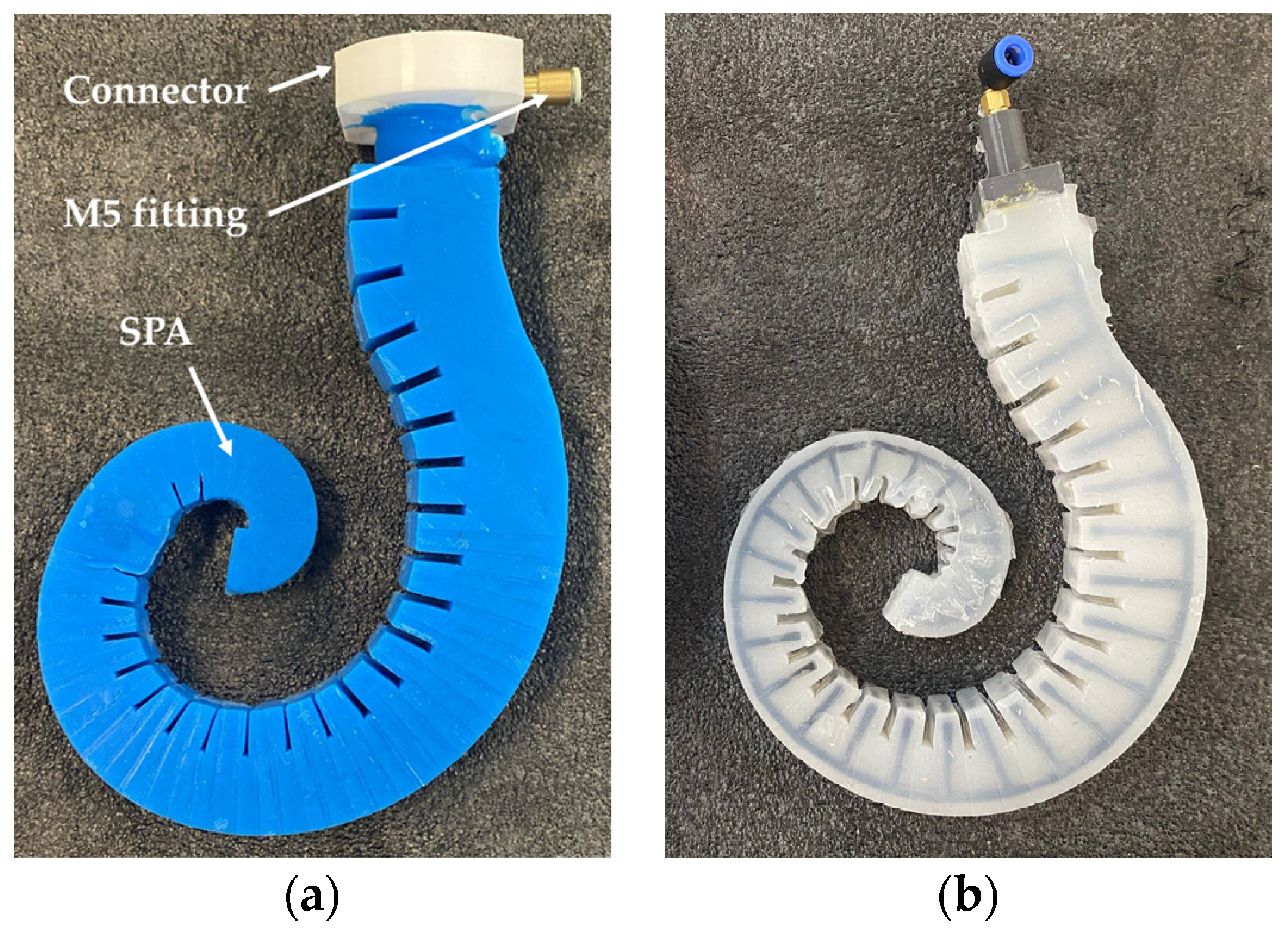
- stage I: for the realization of the lowest half of the actuator. The reinforcement and core are suspended in the lower mold by attachments mounted in the intermediate mold, as shown in Figure 8a. In the same figure, the yellow surface represents the area to be filled by silicone rubber. The latter, the blue-colored volume in Figure 8b, is poured from above into the lower mold up to the interface surface between the two molds. In Figure 8b, there are also details about the connection between the reinforcement and intermediate mold (red line) and the reinforcement–core connections that ensure the proper distance between them (yellow circle). Figure 8c shows the experimental end of the first stage;
- -
- stage II: for the realization of the remaining half of the actuator. After 3 h at 20 °C, the intermediate mold must be removed. The attachments between the reinforcement and core must be cut. This operation allows the remaining part of the reinforcement and the core to be surrounded by silicone rubber, and the core can be removed in the final stage to obtain the feeding channel. It was no longer necessary to keep the reinforcement and core raised, as the solid silicone rubber on the bottom acts as a support. Hence, the upper mold replaces the intermediate one. Figure 8d shows the mounting of the overall set of molds with the pneumatic fitting used to feed the silicone by an injection process with a double-acting cylinder.
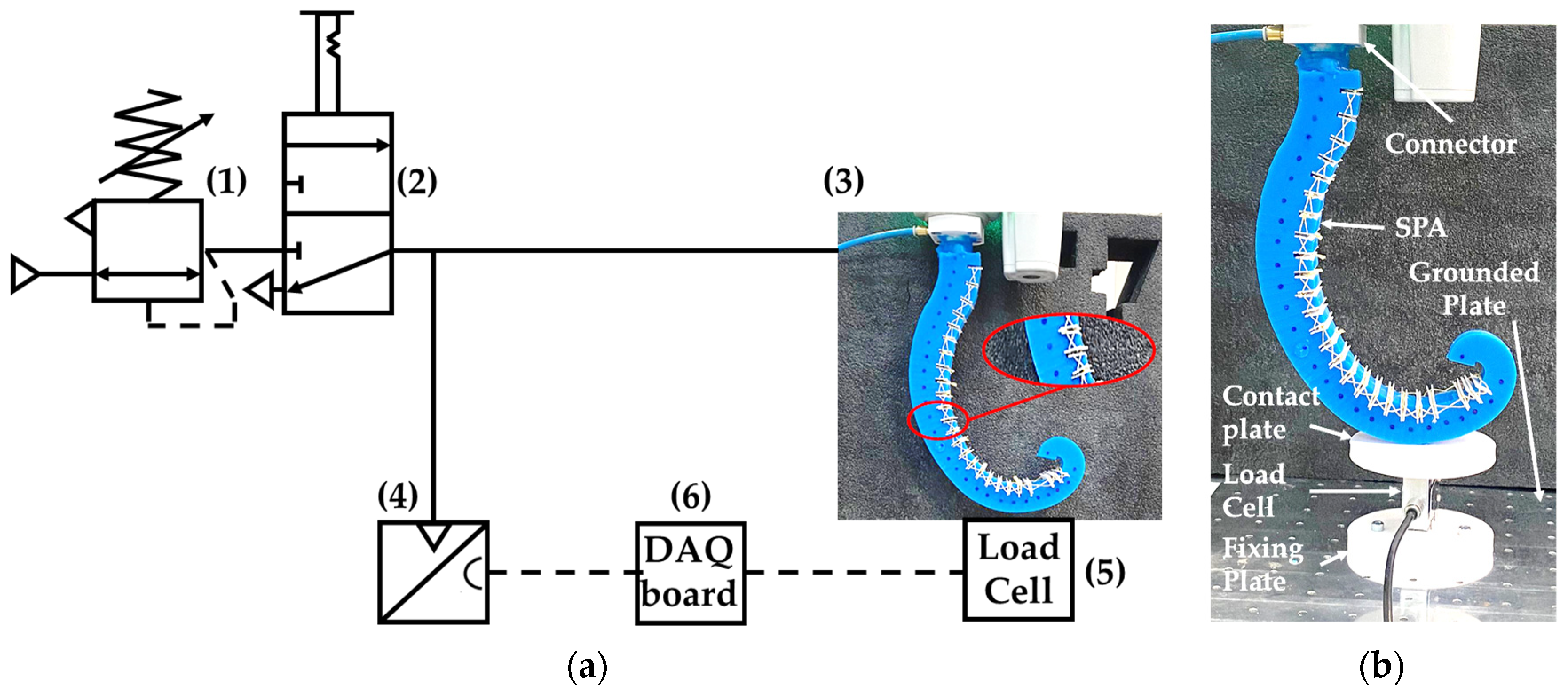
4. Experimental Characterization
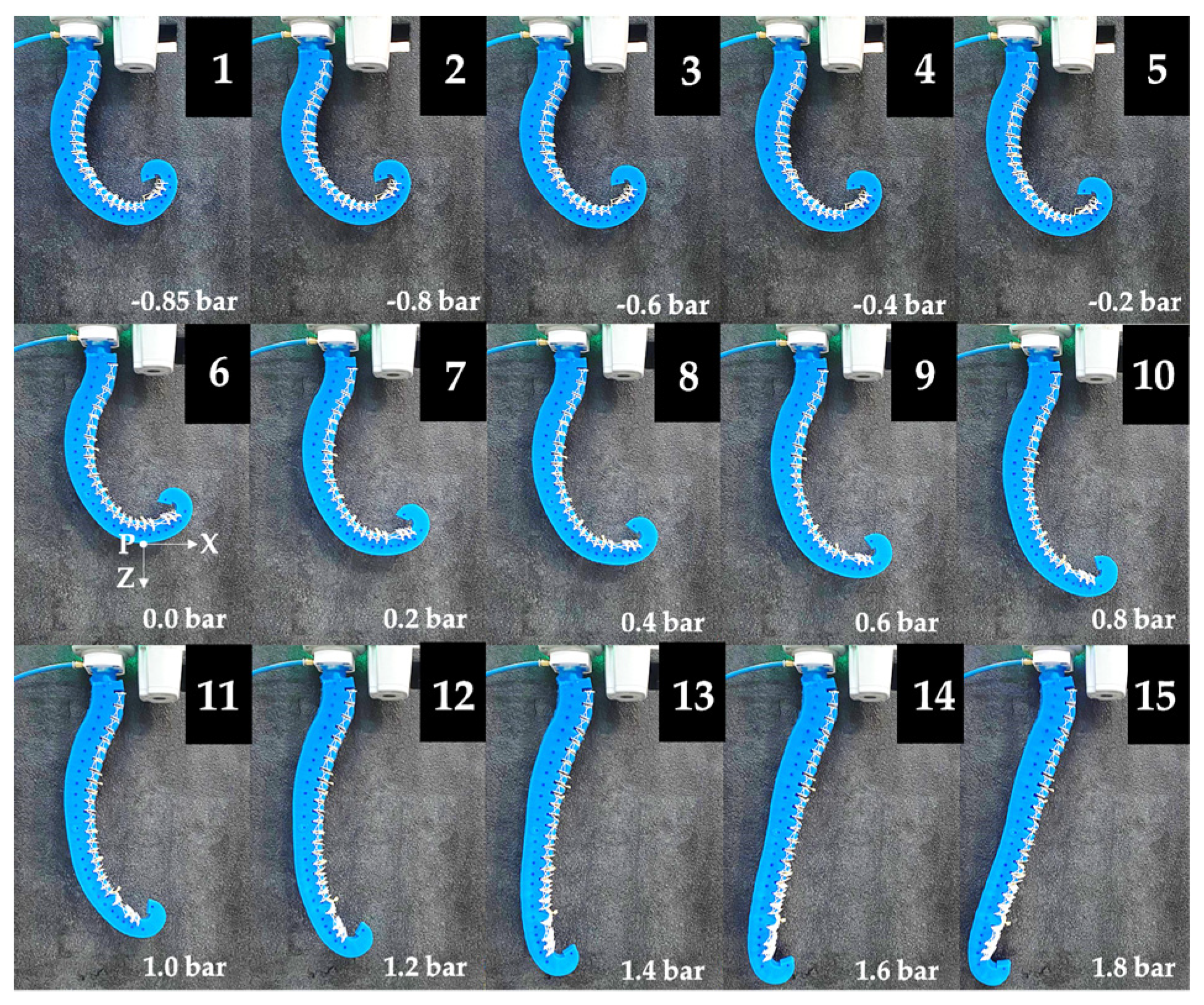
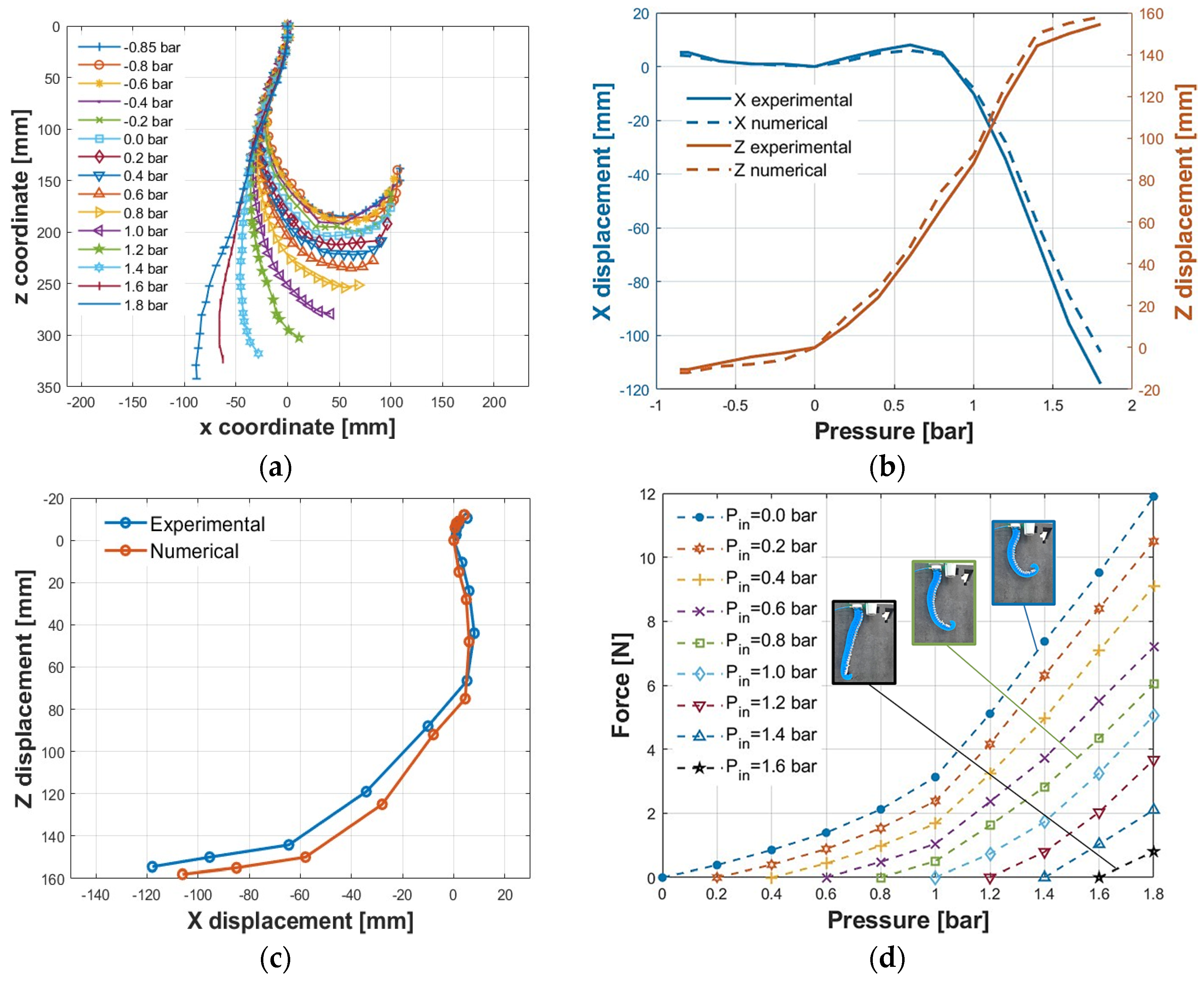
4.1. Isotonic Tests with an External Null Load
4.2. Isometric Tests
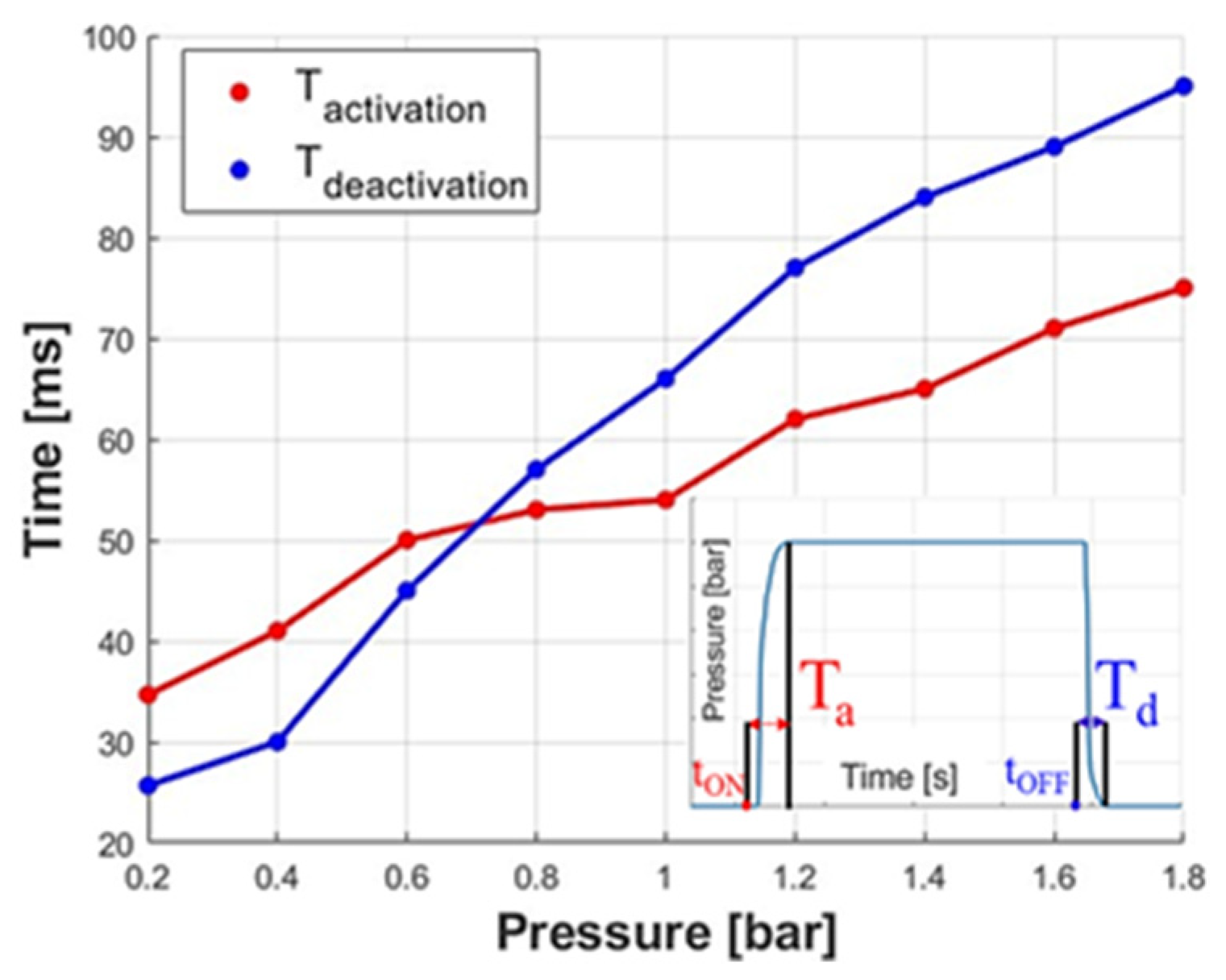
4.3. Activation/Deactivation Times
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Hepp, J.; Badri-Spröwitz, A. A Novel Spider-Inspired Rotary-Rolling Diaphragm Actuator with Linear Torque Characteristic and High Mechanical Efficiency. Soft Robot. 2022, 9, 364–375. [Google Scholar] [CrossRef]
- Pena-Francesch, A.; Jung, H.; Demirel, M.C.; Sitti, M. Biosynthetic self-healing materials for soft machines. Nat. Mater. 2020, 19, 1230–1235. [Google Scholar] [CrossRef] [PubMed]
- Ratwani, C.R.; Kamali, A.R.; Abdelkader, A.M. Self-healing by Diels-Alder cycloaddition in advanced functional polymers: A review. Prog. Mater. Sci. 2023, 131, 101001. [Google Scholar] [CrossRef]
- Antonelli, M.G.; Beomonte Zobel, P.; D’Ambrogio, W.; Durante, F. Design Methodology for a Novel Bending Pneumatic Soft Actuator for Kinematically Mirroring the Shape of Objects. Actuators 2020, 9, 113. [Google Scholar] [CrossRef]
- Antonelli, M.G.; D’Ambrogio, W.; Durante, F. Development of a pneumatic soft actuator as a hand finger for a collaborative robot. In Proceedings of the 2nd International Conference on Mechatronics Systems and Control Engineering, Amsterdam, The Netherlands, 21–23 February 2018; pp. 67–71. [Google Scholar]
- Manti, M.; Hassan, T.; Passetti, G.; D‘Elia, N.; Laschi, C.; Cianchetti, M. A Bioinspired Soft Robotic Gripper for Adaptable and Effective Grasping. Soft Robot. 2015, 2, 107–116. [Google Scholar] [CrossRef]
- Curkovic, P.; Cubric, G. Fused Deposition Modelling for 3D Printing of Soft Anthropomorphic Actuators. Int. J. Simul. Model. 2021, 20, 303–314. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, J.; Zhang, S.; Zhang, P.; Dong, G.; Wu, J.; Zhang, J. Transporting Dispersed Cylindrical Granules: An Intelligent Strategy Inspired by an Elephant Trunk. Adv. Intell. Syst. 2023, 5, 2300182. [Google Scholar] [CrossRef]
- Leanza, S.; Lu-Yang, J.; Kaczmarski, B.; Wu, S.; Kuhl, E.; Zhao, R.R. Elephant Trunk Inspired Multimodal Deformations and Movements of Soft Robotic Arms. Adv. Funct. Mater. 2024, 2400396. [Google Scholar] [CrossRef]
- Hammond, M.; Cichella, V.; Lamuta, C. Bioinspired Soft Robotics: State of the Art, Challenges, and Future Directions. Curr. Robot. Rep. 2023, 4, 65–80. [Google Scholar] [CrossRef]
- Marechal, L.; Balland, P.; Lindenroth, L.; Petrou, F.; Kontovounisios, C.; Bello, F. Toward a Common Framework and Database of Materials for Soft Robotics. Soft Robot. 2021, 8, 284–297. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed]
- Lalegani Dezaki, M.; Bodaghi, M.; Serjouei, A.; Afazov, S.; Zolfagharian, A. Soft Pneumatic Actuators with Controllable Stiffness by Bio-Inspired Lattice Chambers and Fused Deposition Modeling 3D Printing. Adv. Eng. Mater. 2023, 25, 2200797. [Google Scholar] [CrossRef]
- Porter, M.M.; Ravikumar, N. 3D-printing a f‘amily’ of biomimetic models to explain armored grasping in syngnathid fishes. Bioinspir. Biomim. 2017, 12, 066007. [Google Scholar] [CrossRef] [PubMed]
- Porter, M.M.; Ravikumar, N.; Barthelat, F.; Martini, R. 3D-printing and mechanics of bio-inspired articulated and multi-material structures. J. Mech. Behav. Biomed. Mater. 2017, 73, 114–126. [Google Scholar] [CrossRef] [PubMed]
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, B.; Follador, M.; Dario, P. Soft Robot Arm Inspired by the Octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Fras, J.; Noh, Y.; Macias, M.; Wurdemann, H.; Althoefer, K. Bio-Inspired Octopus Robot Based on Novel Soft Fluidic Actuator. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1583–1588. [Google Scholar]
- Renda, F.; Giorgio-Serchi, F.; Boyer, F.; Laschi, C. Modelling cephalopod-inspired pulsed-jet locomotion for underwater soft robots. Bioinspir. Biomim. 2015, 10, 055005. [Google Scholar] [CrossRef] [PubMed]
- Teejo Mathew, A.; Armanini, C.; Samra Ali Alshehhi, A.A.; Ben Hmida, I.M.; Renda, F. Multifunctional Underwater Soft Robots: A Simulation Essay. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1261, 012008. [Google Scholar] [CrossRef]
- Jayaram, K.; Full, R.J. Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot. Biol. Sci. 2015, 113, 950–957. [Google Scholar] [CrossRef] [PubMed]
- Ataka, A.; Abrar, T.; Putzu, F.; Godaba, H.; Althoefer, K. Observer-based Control of Inflatable Robot with Variable Stiffness. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 8646–8652. [Google Scholar]
- Li, Y.; Li, Y.; Ren, T.; Xia, J.; Liu, H.; Wu, C.; Lin, S.; Chen, Y. An Untethered Soft Robotic Dog Standing and Fast Trotting with Jointless and Resilient Soft Legs. Biomimetics 2023, 8, 596. [Google Scholar] [CrossRef]
- Bernth, J.E.; Arezzo, A.; Liu, H. A Novel Robotic Meshworm With Segment-Bending Anchoring for Colonoscopy. IEEE Robot. Autom. Lett. 2017, 2, 1718–1724. [Google Scholar] [CrossRef]
- Das, R.; Babu, S.P.M.; Visentin, F.; Palagi, S.; Mazzolai, B. An earthworm-like modular soft robot for locomotion in multi-terrain environments. Sci. Rep. 2023, 13, 1571. [Google Scholar] [CrossRef] [PubMed]
- Alcaide, J.O.; Pearson, L.; Rentschler, M.E. Design, modeling and control of a SMA-actuated biomimetic robot with novel functional skin. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4338–4345. [Google Scholar]
- Yu, B.; Yang, J.; Du, R.; Zhong, Y. A Versatile Pneumatic Actuator Based on Scissor Mechanisms: Design, Modeling, and Experiments. IEEE Robot. Autom. Lett. 2021, 6, 1288–1295. [Google Scholar] [CrossRef]
- Zhong, Y.; Yu, B.; Yu, H. Design and Study of Scissor-Mechanism-Based Pneumatic Actuator With a Characteristic of Bidirectional Contraction. IEEE/ASME Trans. Mechatron. 2022, 27, 2080–2088. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1. [Google Scholar] [CrossRef] [PubMed]
- Antonelli, M.G.; Beomonte Zobel, P.; D’Ambrogio, W.; Durante, F.; Raparelli, T. An Analytical Formula For Designing Mckibben Pneumatic Muscles. Int. J. Mech. Eng. Technol. 2018, 9, 320–337. [Google Scholar]
- Lalegani Dezaki, M.; Sales, R.; Zolfagharian, A.; Yazdani Nezhad, H.; Bodaghi, M. Soft pneumatic actuators with integrated resistive sensors enabled by multi-material 3D printing. Int. J. Adv. Manuf. Technol. 2023, 128, 4207–4221. [Google Scholar] [CrossRef]
- Ferrentino, P.; Roels, E.; Brancart, J.; Terryn, S.; Van Assche, G.; Vanderborght, B. Finite Element Analysis-Based Soft Robotic Modeling: Simulating a Soft Actuator in SOFA. IEEE Robot. Autom. Mag. 2023, 2–12. [Google Scholar] [CrossRef]
- Antonelli, M.G.; D’Ambrogio, W. Soft Pneumatic Helical Actuator for Collaborative Robotics. In Advances in Italian Mechanism Science, Proceedings of the International Conference of IFToMM Italy, Naples, Italy, 7–9 September 2022; Springer International Publishing: Cham, Switzerland, 2022; Volume 122, pp. 702–709. [Google Scholar] [CrossRef]
- Liu, C.H.; Chen, L.J.; Chi, J.C.; Wu, J.Y. Topology Optimization Design and Experiment of a Soft Pneumatic Bending Actuator for Grasping Applications. IEEE Robot. Autom. Lett. 2022, 7, 2086–2093. [Google Scholar] [CrossRef]
- Schwarz Junior, R.; Novelino, A.C.; Franco, P.; De, A.; Ribeiro, S.; Andrade Martins, M.; Soeth, M.; Cardoso, O.R.; Spach, H.L. Ecological and growth patterns of the longsnout seahorse Hippocampus reidi inferred by mark-recapture techniques in a tropical estuary. Biota Neotrop. 2021, 21. [Google Scholar] [CrossRef]
- Alves Valentin, G.; Pinto, L.M.; César Gurgel Lourenço, R. Population structure of the seahorse Hippocampus reidi (Syngnathiformes: Syngnathidae) in a Brazilian semi-arid estuary. Neotrop. Ichthyol. 2023, 21. [Google Scholar] [CrossRef]
- Hale, M.E. Functional morphology of ventral tail bending and prehensile abilities of the seahorse, Hippocampus kuda. J. Morphol. 1996, 227, 51–65. [Google Scholar] [CrossRef]
- Praet, T.; Adriaens, D.; Cauter, S.V.; Masschaele, B.; Beule, M.D.; Verhegghe, B. Inspiration from nature: Dynamic modelling of the musculoskeletal structure of the seahorse tail. Int. J. Numer. Meth. Biomed. Engng. 2012, 28, 1028–1042. [Google Scholar] [CrossRef]
- Porter, M.M.; Adriaens, D.; Mckittrick, J. Why the seahorse tail is square. Science 2015, 349. [Google Scholar] [CrossRef] [PubMed]
- Porter, M.M.; Novitskaya, E.; Castro-Ceseña, A.B.; Meyers, M.A.; Mckittrick, J. Highly deformable bones: Unusual deformation mechanisms of seahorse armor. Acta Biomater. 2013, 9, 6763–6770. [Google Scholar] [CrossRef] [PubMed]
- Cauter, S.; Adriaens, D.; Srikanth, K.; Srikanth, S.; Praet, T.; Masschaele, B.; Beule, M.; Verhegghe, B. Design From Nature: Kinematic Modeling of the Seahorse Tail. In Proceedings of the ASME 2011 Summer Bioengineering Conference, SBC, Farmington, PA, USA, 22–25 June 2011; pp. 385–386. [Google Scholar]
- Zhang, J.; Hu, Y.; Li, Y.; Ma, K.; Wei, Y.; Yang, J.; Wu, Z.; Rajabi, H.; Peng, H.; Wu, J. Versatile Like a Seahorse Tail: A Bio-Inspired Programmable Continuum Robot For Conformal Grasping. Adv. Intell. Syst. 2022, 4, 2200263. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, J.; Huang, J.; Wu, Q.; Zhao, Y.; Yang, J.; Rajabi, H.; Wu, Z.; Peng, H.; Wu, J. In Situ Reconfigurable Continuum Robot with Varying Curvature Enabled by Programmable Tensegrity Building Blocks. Adv. Intell. Syst. 2023, 5, 2300048. [Google Scholar] [CrossRef]
- Wang, Z.; Freris, N.M. Bioinspired Soft Spiral Robots for Versatile Grasping and Manipulation. arXiv 2023, arXiv:2303.09861. [Google Scholar]
- Li, L.; Jin, T.; Tian, Y.; Yang, F.; Xi, F. Design and Analysis of a Square-Shaped Continuum Robot With Better Grasping Ability. IEEE Access 2019, 7, 57151–57162. [Google Scholar] [CrossRef]
- Antonelli, M.G.; Beomonte Zobel, P.; Manes, C.; Mattei, E.; Stampone, N. Emotional Intelligence for the Decision-Making Process of Trajectories in Collaborative Robotics. Machines 2024, 12, 113. [Google Scholar] [CrossRef]
- Mészáros, A.; Sárosi, J. Increasing the Force Exertion of a Soft Actuator Using Externally Attachable Inter-Chamber Plates. Actuators 2023, 12, 222. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonelli, M.G.; Beomonte Zobel, P.; Sarwar, M.A.; Stampone, N. Seahorse-Tail-Inspired Soft Pneumatic Actuator: Development and Experimental Characterization. Biomimetics 2024, 9, 264. https://doi.org/10.3390/biomimetics9050264
Antonelli MG, Beomonte Zobel P, Sarwar MA, Stampone N. Seahorse-Tail-Inspired Soft Pneumatic Actuator: Development and Experimental Characterization. Biomimetics. 2024; 9(5):264. https://doi.org/10.3390/biomimetics9050264
Chicago/Turabian StyleAntonelli, Michele Gabrio, Pierluigi Beomonte Zobel, Muhammad Aziz Sarwar, and Nicola Stampone. 2024. "Seahorse-Tail-Inspired Soft Pneumatic Actuator: Development and Experimental Characterization" Biomimetics 9, no. 5: 264. https://doi.org/10.3390/biomimetics9050264
APA StyleAntonelli, M. G., Beomonte Zobel, P., Sarwar, M. A., & Stampone, N. (2024). Seahorse-Tail-Inspired Soft Pneumatic Actuator: Development and Experimental Characterization. Biomimetics, 9(5), 264. https://doi.org/10.3390/biomimetics9050264