
Shape Memory Alloys Patches to Mimic Rolling, Sliding, and Spinning Movements of the Knee




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Analysis of SMA Actuation Characteristics through Force and Torque Measurement
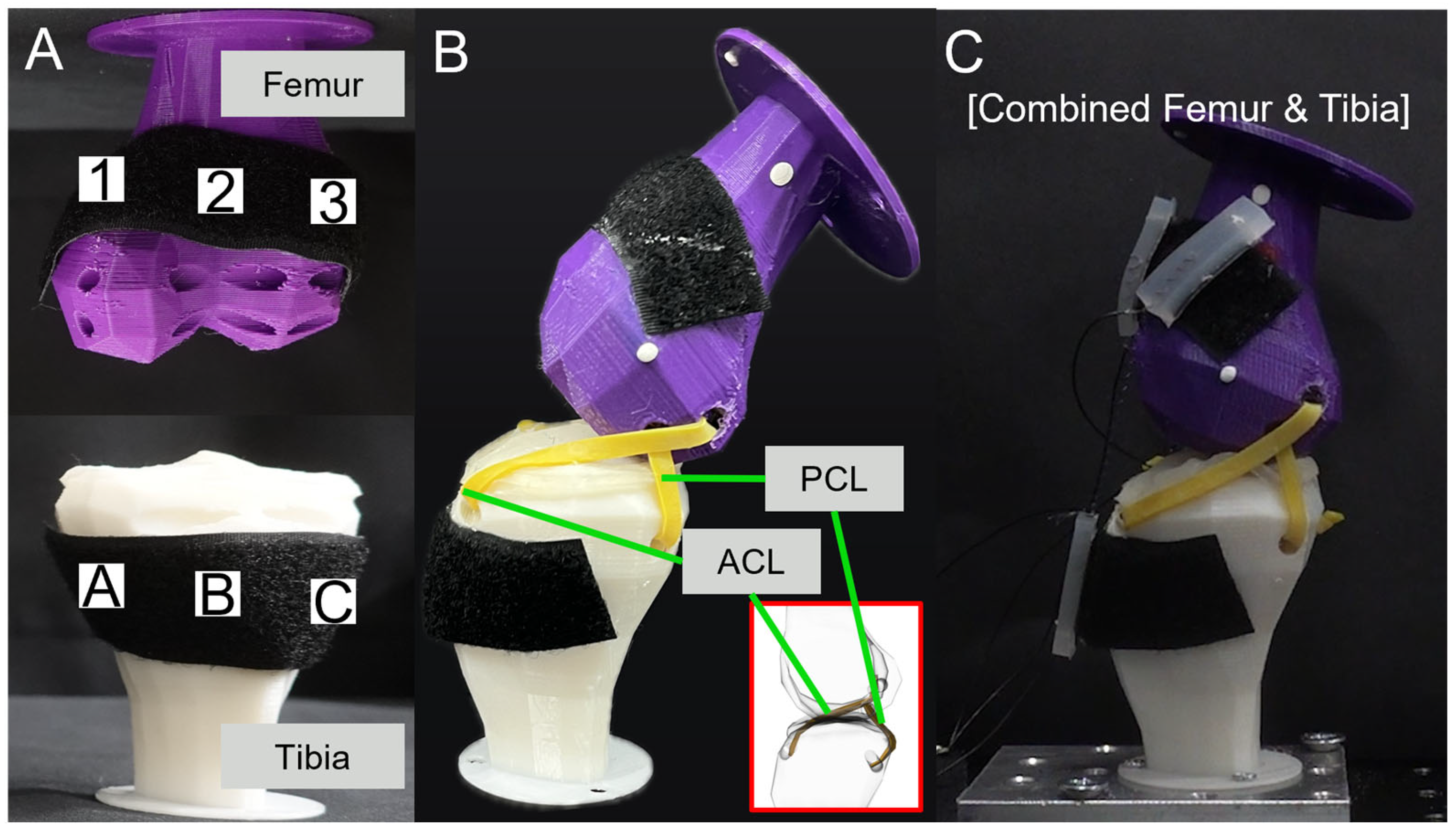
2.2. Fabrication Method for Artificial Bones and Patches to Mimic Knee Movements
2.3. Analysis of Knee Movement in Artificial Bones Depending on the Attachment Position of SMA Patches
3. Results
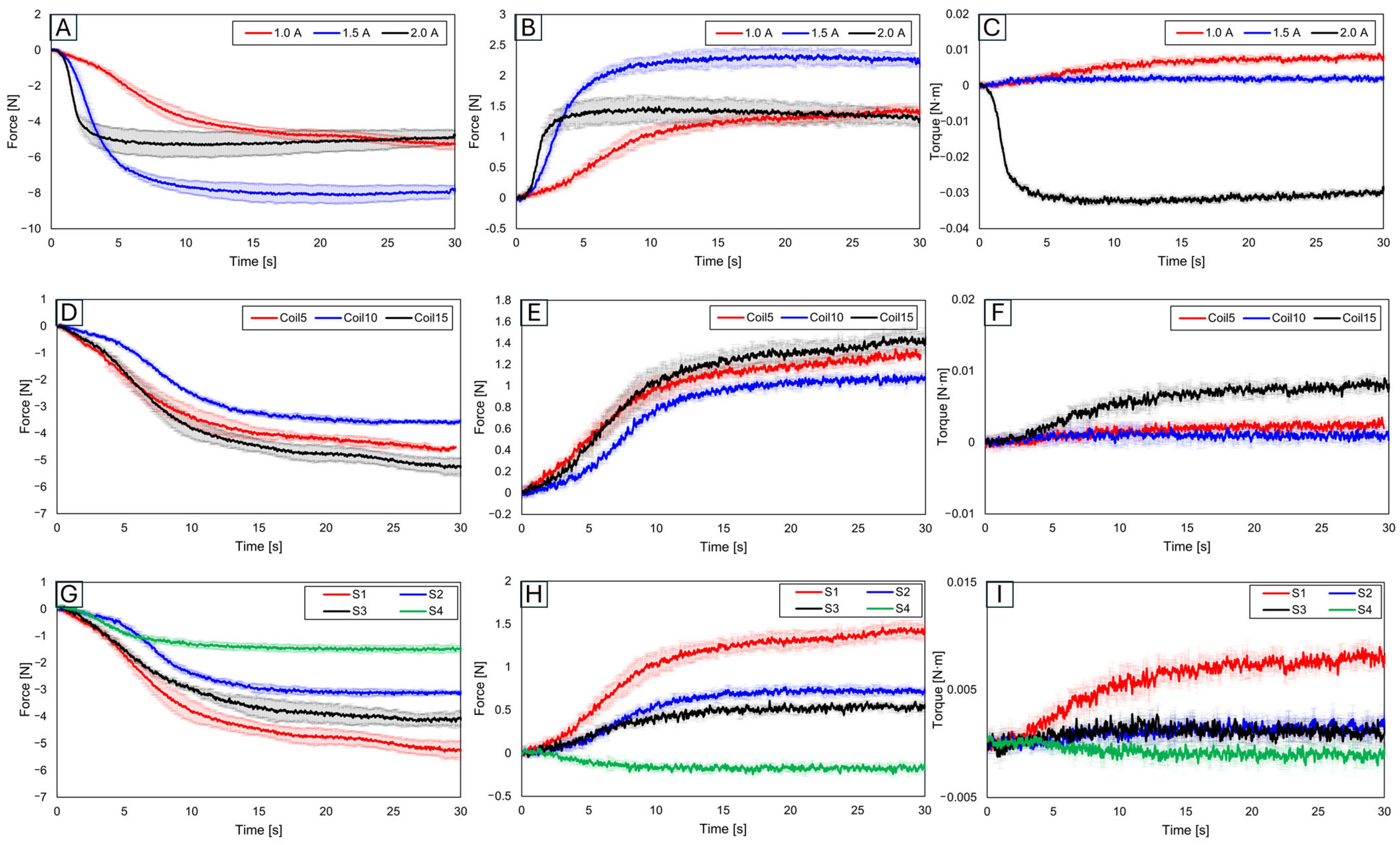
3.1. Force and Torque Values According to Characteristics of SMA
3.1.1. Force and Trajectory Depending on Applied Current
3.1.2. Force and Trajectory Depending on the Number of Coils
3.1.3. Force and Trajectory Depending on the Locations of the Slot
3.2. Mimicking Knee Movement with Attached SMA
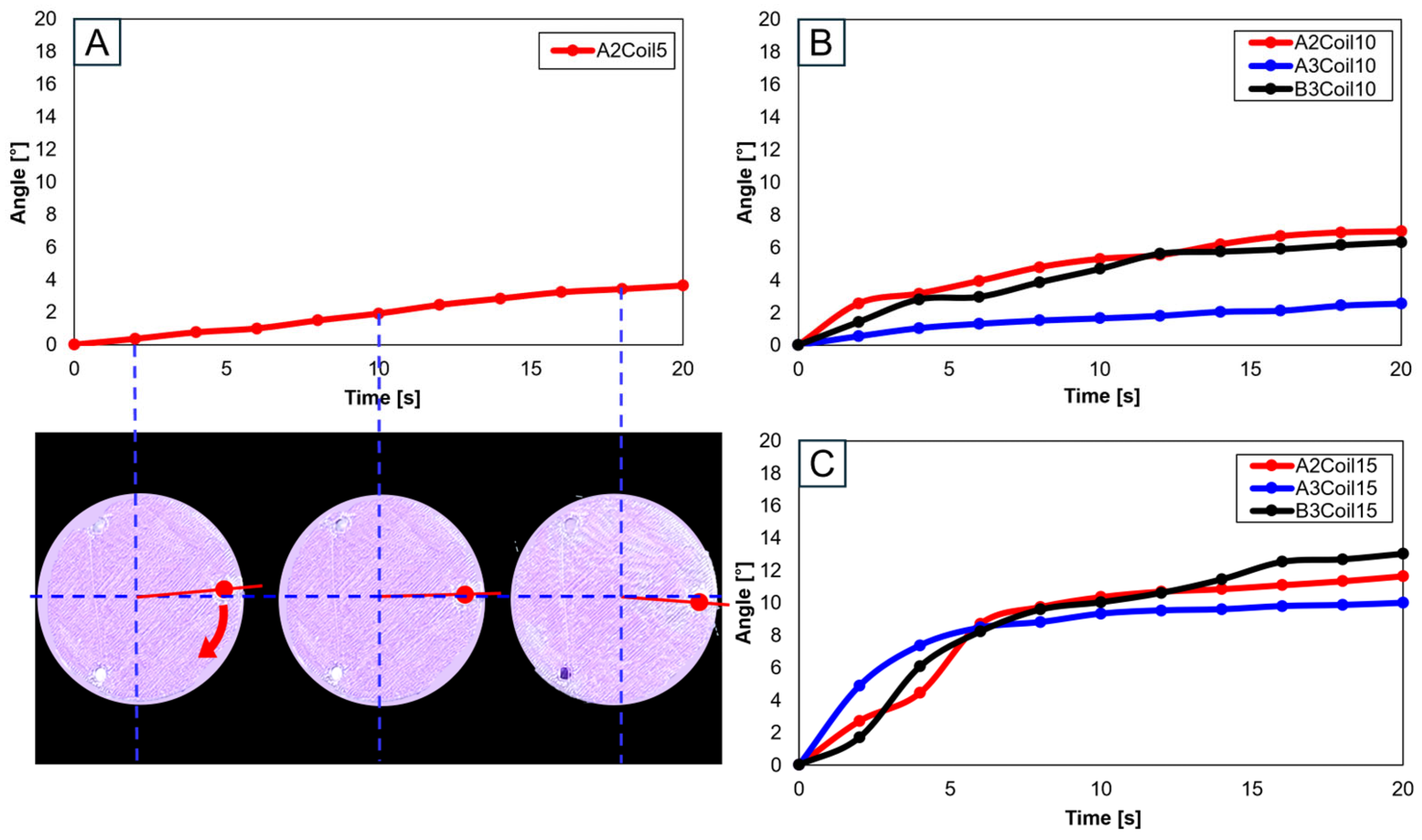
3.2.1. Variation in Knee Movement with Applied Current
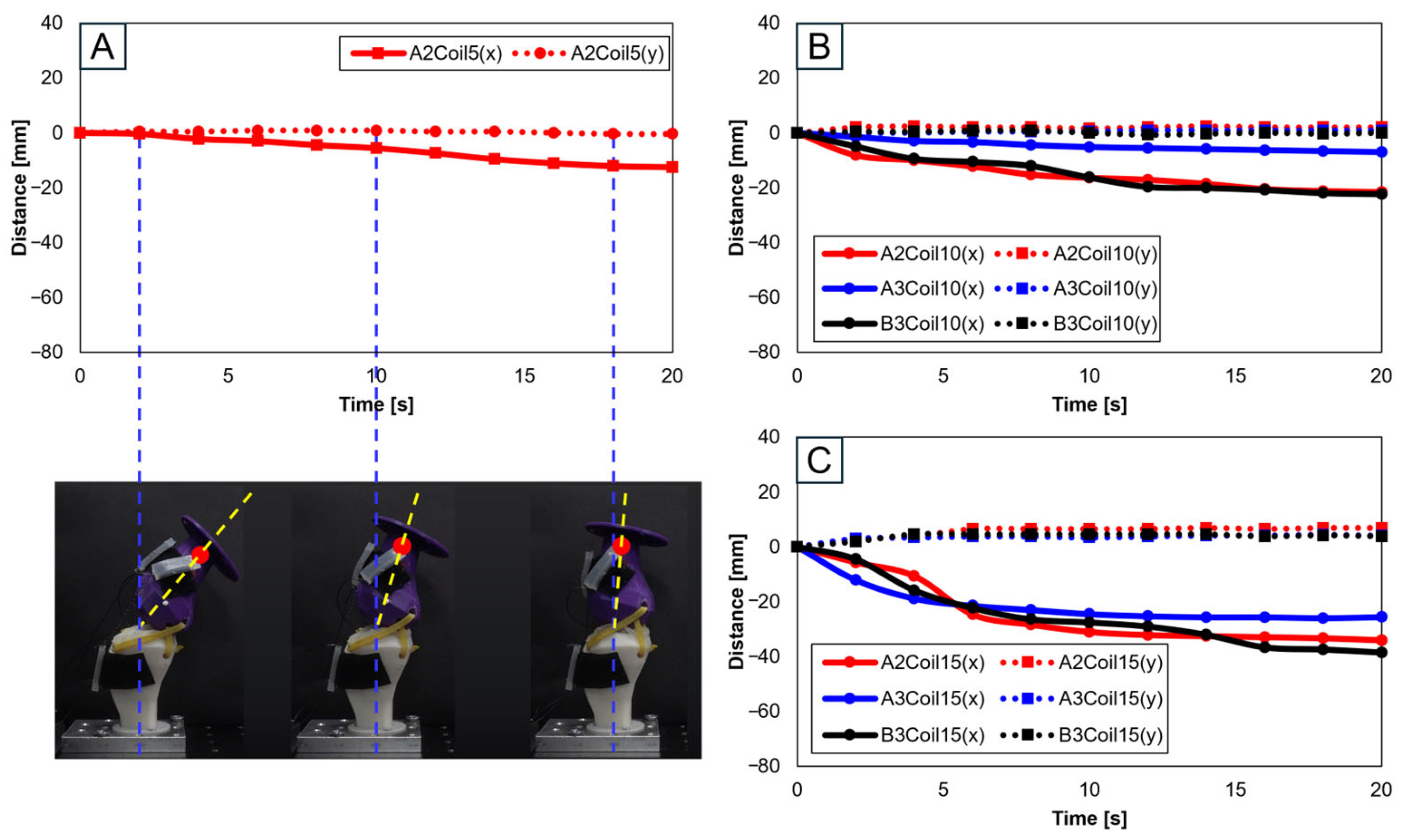
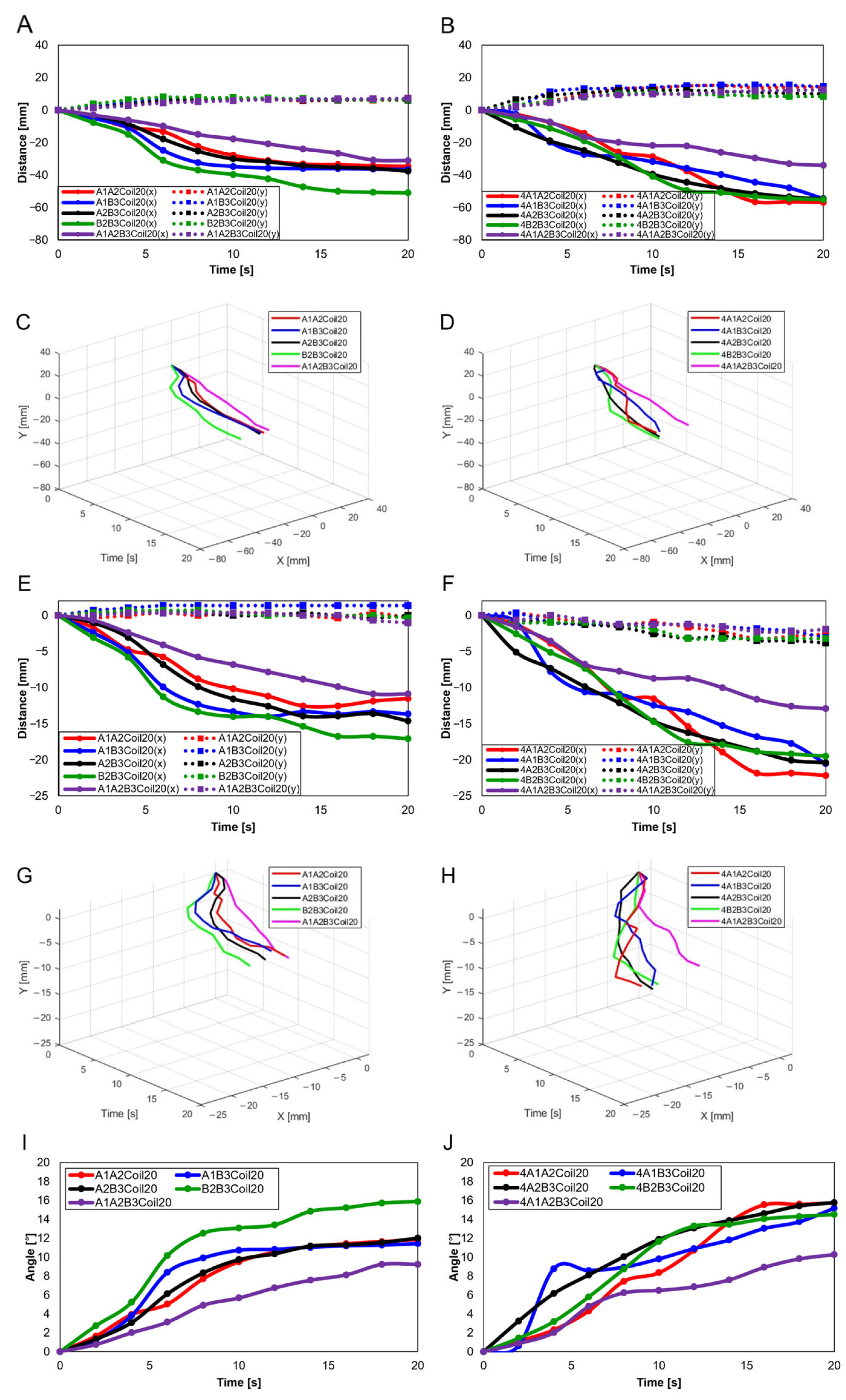
3.2.2. Trajectories of Sagittal Plane, Trajectory M
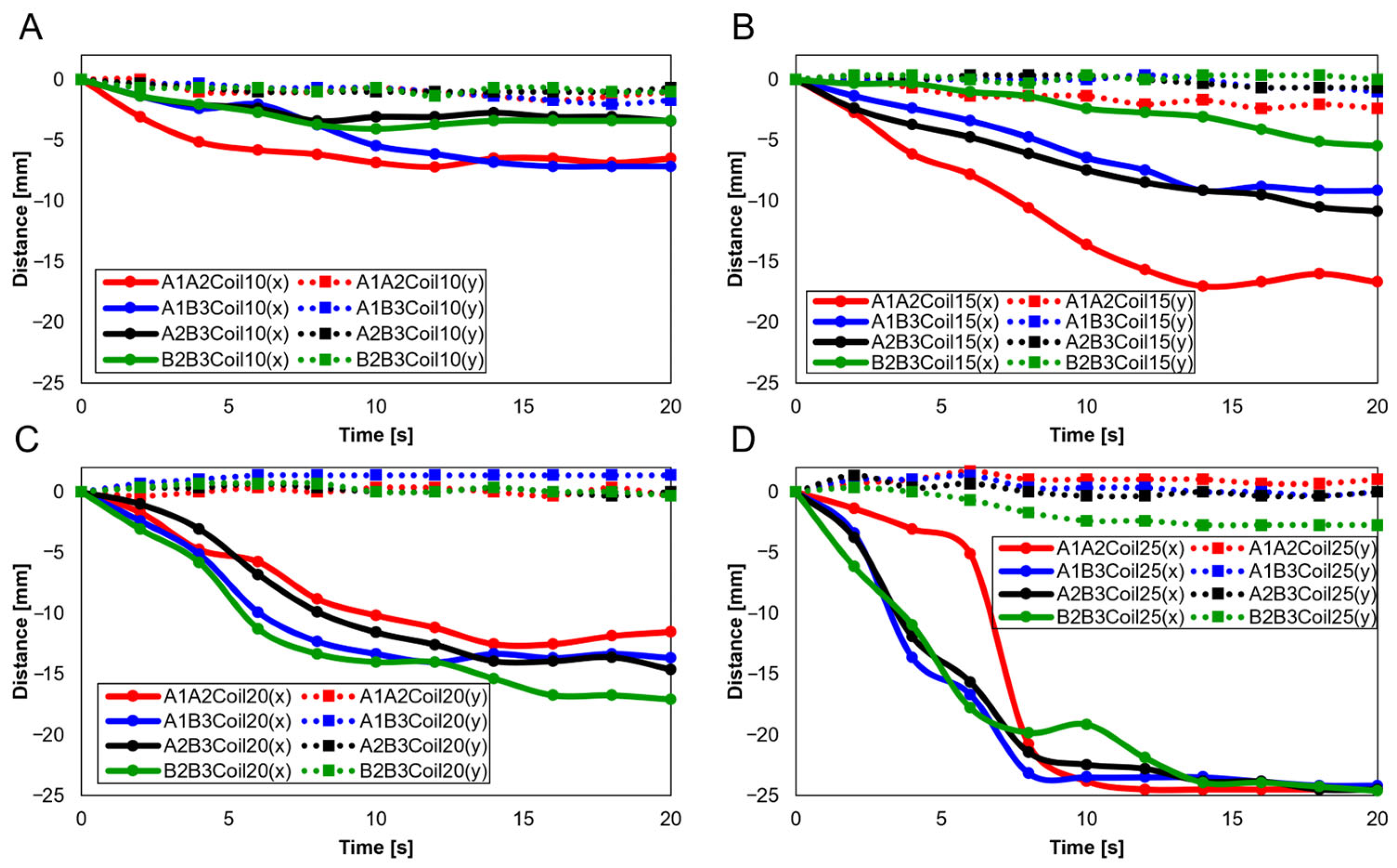
3.2.3. Trajectories of Sagittal plane, Trajectory E
3.2.4. Trajectories of Transverse Plane
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- KDCA. Available online: https://health.kdca.go.kr (accessed on 14 February 2024).
- Perruccio, A.V.; Young, J.J.; Wilfong, J.M.; Power, J.D.; Canizares, M.; Badley, E.M. Osteoarthritis year in review 2023: Epidemiology & therapy. Osteoarthr. Cartil. 2023, 32, 159–165. [Google Scholar]
- Wang, X.; Perry, T.A.; Arden, N.; Chen, L.; Parsons, C.M.; Cooper, C.; Gates, L.; Hunter, D.J. Occupational risk in knee osteoarthritis: A systematic review and meta-analysis of observational studies. Arthritis Care Res. 2020, 72, 1213–1223. [Google Scholar] [CrossRef] [PubMed]
- Hayes, B.; Kittelson, A.; Loyd, B.; Wellsandt, E.; Flug, J.; Stevens-Lapsley, J. Assessing radiographic knee osteoarthritis: An online training tutorial for the Kellgren-Lawrence Grading Scale. MedEdPORTAL 2016, 12, 10503. [Google Scholar] [CrossRef] [PubMed]
- Riddle, D.L.; Jiranek, W.A. Knee osteoarthritis radiographic progression and associations with pain and function prior to knee arthroplasty: A multicenter comparative cohort study. Osteoarthr. Cartil. 2015, 23, 391–396. [Google Scholar] [CrossRef] [PubMed]
- Ajuied, A.; Wong, F.; Smith, C.; Norris, M.; Earnshaw, P.; Back, D.; Davies, A. Anterior cruciate ligament injury and radiologic progression of knee osteoarthritis: A systematic review and meta-analysis. Am. J. Sports Med. 2014, 42, 2242–2252. [Google Scholar] [CrossRef] [PubMed]
- Kohn, M.D.; Sassoon, A.A.; Fernando, N.D. Classifications in brief: Kellgren-Lawrence classification of osteoarthritis. Clin. Orthop. Relat. Res. 2016, 474, 1886–1893. [Google Scholar] [CrossRef] [PubMed]
- Kang, M.; Seo, S.; Lee, H.; Han, M.-W. Knee Measurement System with Osteoarthritis Levels Using Artificial Cartilage and Skeletons. Biomimetics 2024, 9, 166. [Google Scholar] [CrossRef] [PubMed]
- Verjans, M.; Asseln, M.; Radermacher, K. Rapid prototyping of replica knee implants for in vitro testing. Curr. Dir. Biomed. Eng. 2016, 2, 553–556. [Google Scholar] [CrossRef][Green Version]
- Zhou, F.; Xue, F.; Zhang, S. The application of 3D printing patient specific instrumentation model in total knee arthroplasty. Saudi J. Biol. Sci. 2020, 27, 1217–1221. [Google Scholar] [CrossRef]
- Hiranaka, T.; Suda, Y.; Saitoh, A.; Tanaka, A.; Arimoto, A.; Koide, M.; Fujishiro, T.; Okamoto, K. Current concept of kinematic alignment total knee arthroplasty and its derivatives. Bone Jt. Open 2022, 3, 390–397. [Google Scholar] [CrossRef]
- Maag, C.; Metcalfe, A.; Cracaoanu, I.; Wise, C.; Auger, D.D. The development of simulator testing for total knee replacements. Biosurface Biotribology 2021, 7, 70–82. [Google Scholar] [CrossRef]
- Bates, N.A.; Nesbitt, R.J.; Shearn, J.T.; Myer, G.D.; Hewett, T.E. A novel methodology for the simulation of athletic tasks on cadaveric knee joints with respect to in vivo kinematics. Ann. Biomed. Eng. 2015, 43, 2456–2466. [Google Scholar] [CrossRef]
- Moissenet, F.; Cheze, L.; Dumas, R. A 3D lower limb musculoskeletal model for simultaneous estimation of musculo-tendon, joint contact, ligament and bone forces during gait. J. Biomech. 2014, 47, 50–58. [Google Scholar] [CrossRef]
- Shirazi, R.; Shirazi-Adl, A. Computational biomechanics of articular cartilage of human knee joint: Effect of osteochondral defects. J. Biomech. 2009, 42, 2458–2465. [Google Scholar] [CrossRef]
- Marra, M.A.; Vanheule, V.; Fluit, R.; Koopman, B.H.; Rasmussen, J.; Verdonschot, N.; Andersen, M.S. A subject-specific musculoskeletal modeling framework to predict in vivo mechanics of total knee arthroplasty. J. Biomech. Eng. 2015, 137, 020904. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, J.; O’Connor, J.; Pandit, H.; Dodd, C.; Murray, D. Unicompartmental Arthroplasty with the Oxford Knee; Goodfellow Publishers Limited: Oxford, UK, 2015. [Google Scholar]
- Trad, Z.; Barkaoui, A.; Chafra, M. A three dimensional finite element analysis of mechanical stresses in the human knee joint: Problem of cartilage destruction. J. Biomim. Biomater. Biomed. Eng. 2017, 32, 29–39. [Google Scholar] [CrossRef]
- Abid, M.; Mezghani, N.; Mitiche, A. Knee joint biomechanical gait data classification for knee pathology assessment: A literature review. Appl. Bionics Biomech. 2019, 2019, 7472039. [Google Scholar] [CrossRef] [PubMed]
- Affatato, S. Biomechanics of the knee. In Surgical Techniques in Total Knee Arthroplasty and Alternative Procedures; Elsevier: Amsterdam, The Netherlands, 2015; pp. 17–35. [Google Scholar]
- Mesfar, W.; Shirazi-Adl, A. Biomechanics of the knee joint in flexion under various quadriceps forces. Knee 2005, 12, 424–434. [Google Scholar] [CrossRef] [PubMed]
- Hijikata, H.; Tanifuji, O.; Mochizuki, T.; Sato, T.; Watanabe, S.; Katsumi, R.; Hokari, S.; Kawashima, H. The morphology of the femoral posterior condyle affects the external rotation of the femur. J. Exp. Orthop. 2023, 10, 122. [Google Scholar] [CrossRef]
- Karade, V.; Ravi, B. Analysis on anatomical references to assess the coronal alignment of tibial and femoral cuts in mega prosthetic knee replacement. J. Orthop. Traumatol. 2014, 15, 87–93. [Google Scholar] [CrossRef][Green Version]
- Liu, R.; Zheng, H.; Hliboký, M.; Endo, H.; Zhang, S.; Baba, Y.; Sawada, H. Anatomically-Inspired Robotic Finger with SMA Tendon Actuation for Enhanced Biomimetic Functionality. Biomimetics 2024, 9, 151. [Google Scholar] [CrossRef] [PubMed]
- Cortez, R.; Sandoval-Chileño, M.A.; Lozada-Castillo, N.; Luviano-Juárez, A. Snake Robot with Motion Based on Shape Memory Alloy Spring-Shaped Actuators. Biomimetics 2024, 9, 180. [Google Scholar] [CrossRef] [PubMed]
- Villoslada, A.; Flores, A.; Copaci, D.; Blanco, D.; Moreno, L. High-displacement flexible shape memory alloy actuator for soft wearable robots. Robot. Auton. Syst. 2015, 73, 91–101. [Google Scholar] [CrossRef]
- Hu, K.; Rabenorosoa, K.; Ouisse, M. A review of SMA-based actuators for bidirectional rotational motion: Application to origami robots. Front. Robot. AI 2021, 8, 678486. [Google Scholar] [CrossRef] [PubMed]
- Buehler, W.J.; Gilfrich, J.V.; Wiley, R. Effect of low-temperature phase changes on the mechanical properties of alloys near composition TiNi. J. Appl. Phys. 1963, 34, 1475–1477. [Google Scholar] [CrossRef]
- Choi, K.; Park, S.J.; Won, M.; Park, C.H. Soft fabric muscle based on thin diameter SMA springs. Smart Mater. Struct. 2022, 31, 055020. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Kim, D.-R.; Ahn, S.-H. Curved shape memory alloy-based soft actuators and application to soft gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Han, M.-W.; Quan, Y.-J.; Ahn, S.-H. Comparison of mold designs for SMA-based twisting soft actuator. Sens. Actuators A Phys. 2016, 237, 96–106. [Google Scholar] [CrossRef]
- Mosley, M.; Mavroidis, C.; Pfeiffer, C. Design and dynamics of a shape memory alloy wire bundle actuator. In Proceedings of the ANS, 8th Topical Meeting on Robotics and Remote Systems, Pittsburgh, PA, USA, 25–29 April 1999; pp. 1–14. [Google Scholar]
- Park, S.J.; Kim, U.; Park, C.H. A novel fabric muscle based on shape memory alloy springs. Soft Robot. 2020, 7, 321–331. [Google Scholar] [CrossRef]
- Riccio, A.; Napolitano, C.; Sellitto, A.; Acanfora, V.; Zarrelli, M. Development of a combined micro-macro mechanics analytical approach to design shape memory alloy spring-based actuators and its experimental validation. Sensors 2021, 21, 5506. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, P.; Zhu, H.; Xia, K.; Ren, T.; Shen, Y.; Li, Y. A variable stiffness soft robotic manipulator based on antagonistic design of supercoiled polymer artificial muscles and shape memory alloys. Sens. Actuators A Phys. 2024, 366, 114999. [Google Scholar] [CrossRef]
- Kang, M.; Han, Y.-J.; Han, M.-W. A Shape Memory Alloy-Based Soft Actuator Mimicking an Elephant’s Trunk. Polymers 2023, 15, 1126. [Google Scholar] [CrossRef]
- Golchin, M.N.; Hadi, A.; Tarvirdizadeh, B. Development of a new soft robotic module using compressed air and shape memory alloys. In Proceedings of the 2021 9th RSI International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 19 November 2021; pp. 517–522. [Google Scholar]
- Acharya, S.R.; Hutapea, P. An experimental study on the mechanics and control of SMA-actuated bioinspired needle. Bioinspiration Biomim. 2023, 18, 066008. [Google Scholar] [CrossRef]
- Hwang, J.; Wang, W.D. Shape Memory Alloy-Based Soft Amphibious Robot Capable of Seal-Inspired Locomotion. Adv. Mater. Technol. 2022, 7, 2101153. [Google Scholar] [CrossRef]
- Soomro, A.M.; Memon, F.H.; Lee, J.-W.; Ahmed, F.; Kim, K.H.; Kim, Y.S.; Choi, K.H. Fully 3D printed multi-material soft bio-inspired frog for underwater synchronous swimming. Int. J. Mech. Sci. 2021, 210, 106725. [Google Scholar] [CrossRef]
- Leal, P.B.; Cabral-Seanez, M.; Baliga, V.B.; Altshuler, D.L.; Hartl, D.J. Phase transformation-driven artificial muscle mimics the multifunctionality of avian wing muscle. J. R. Soc. Interface 2021, 18, 20201042. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.S.; Lee, H.S.; Cho, Y.; Heo, J.K.; Quan, Y.J.; Lee, S.W.; Pahk, H.J.; Ahn, S.H. Surface Nanopatterned Shape Memory Alloy (SMA)-Based Photosensitive Artificial Muscle. Adv. Opt. Mater. 2022, 10, 2102024. [Google Scholar] [CrossRef]
- Park, S.J.; Park, C.H. Suit-type wearable robot powered by shape-memory-alloy-based fabric muscle. Sci. Rep. 2019, 9, 9157. [Google Scholar] [CrossRef]
- Lee, S.-M.; Jung, W.-K.; Park, J.; Ahn, S.-H. Development of a 4D hand gripping aid using a knitted shape memory alloy and evaluation of finger-bending angles in elderly women. Fash. Text. 2022, 9, 1–16. [Google Scholar] [CrossRef]
- Hyeon, K.; Jeong, J.; Chung, C.; Cho, M.; Hussain, S.; Kyung, K.-U. Design of a Wearable Mechanism With Shape Memory Alloy (SMA)-Based Artificial Muscle for Assisting With Shoulder Abduction. IEEE Robot. Autom. Lett. 2022, 7, 10635–10642. [Google Scholar] [CrossRef]
- Sun, Z.; Zi, B.; Li, Y. Design and modeling for hybrid driven knee orthosis with SMA actuator. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021; pp. 127–132. [Google Scholar]
- Lee, S.-J.; Kim, J.-Y.; Sim, Y.-J. Effects of accelerated rehabilitation exercise on quadriceps femoris and postural stability after anterior versus posterior cruciate ligament reconstruction. J. Exerc. Rehabil. 2023, 19, 293. [Google Scholar] [CrossRef]
- Niu, Y.; Jia, G.; Chen, Y.; Teng, Y.; Xiang, D.; Liang, X.; Yi, Z.; Zhan, H.; Xia, Y. Application of MRI-related indicators of posterior cruciate ligament in the diagnosis of anterior cruciate ligament injury: An update. Chin. J. Trauma 2023, 8, 570–576. [Google Scholar]
- Ji, R.; Liu, X.; Liu, Y.; Yan, B.; Yang, J.; Lee, W.Y.-W.; Wang, L.; Tao, C.; Kuai, S.; Fan, Y. Kinematic difference and asymmetries during level walking in adolescent patients with different types of mild scoliosis. BioMedical Eng. OnLine 2024, 23, 22. [Google Scholar] [CrossRef] [PubMed]
- Shuman, S.L.; Rivera, R.R.J.; Ahmad, F.; Orías, A.A.E.; Hoy, J.F.; Simcock, X. Ulnar Bowing and Distal Radioulnar Joint Anatomy: A Three-Dimensional, In Situ Clinical Assessment. J. Hand Surg. Glob. Online 2024, 1–6. [Google Scholar] [CrossRef]
- Gaffney, B.M.; Thomsen, P.B.; Leijendekkers, R.; Christiansen, C.L.; Stoneback, J.W. Lumbopelvic Movement Coordination during Walking Improves with Transfemoral Bone Anchored Limbs: Implications for Low Back Pain. Gait Posture 2024, 109, 318–326. [Google Scholar] [CrossRef]
- Roberts, R.M.; Alves Rosa, J.; Curtis, S.; Smith-Collins, A.P.; Kidd, M.; Andronikou, S. Can 3-dimensional cranial ultrasound be used to successfully reconstruct a 2-dimensional image without compromising on image quality in a neonatal population? Pediatr. Radiol. 2024, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Koh, J.-S. Design of shape memory alloy coil spring actuator for improving performance in cyclic actuation. Materials 2018, 11, 2324. [Google Scholar] [CrossRef] [PubMed]
- Kumar, D.; Daudpoto, J.; Chowdhry, B.S. Challenges for practical applications of shape memory alloy actuators. Mater. Res. Express 2020, 7, 073001. [Google Scholar] [CrossRef]
- Holschuh, B.; Newman, D. Low spring index, large displacement shape memory alloy (sma) coil actuators for use in macro-and micro-systems. In Proceedings of the Reliability, Packaging, Testing, and Characterization of MOEMS/MEMS, Nanodevices, and Nanomaterials XIII, San Francisco, CA, USA, 3–4 February 2014; pp. 23–33. [Google Scholar]
- An, S.-M.; Ryu, J.; Cho, M.; Cho, K.-J. Engineering design framework for a shape memory alloy coil spring actuator using a static two-state model. Smart Mater. Struct. 2012, 21, 055009. [Google Scholar] [CrossRef]
- Dhakal, B.; Nicholson, D.; Saleeb, A.; Padula, S.; Vaidyanathan, R. Three-dimensional deformation response of a NiTi shape memory helical-coil actuator during thermomechanical cycling: Experimentally validated numerical model. Smart Mater. Struct. 2016, 25, 095056. [Google Scholar] [CrossRef]
- Sheng, J.; Desai, J.P. Design, modeling and characterization of a novel meso-scale SMA-actuated torsion actuator. Smart Mater. Struct. 2015, 24, 105005. [Google Scholar] [CrossRef] [PubMed]
- Shim, J.-E.; Quan, Y.-J.; Wang, W.; Rodrigue, H.; Song, S.-H.; Ahn, S.-H. A smart soft actuator using a single shape memory alloy for twisting actuation. Smart Mater. Struct. 2015, 24, 125033. [Google Scholar] [CrossRef]





















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, S.; Kang, M.; Han, M.-W. Shape Memory Alloys Patches to Mimic Rolling, Sliding, and Spinning Movements of the Knee. Biomimetics 2024, 9, 255. https://doi.org/10.3390/biomimetics9050255
Seo S, Kang M, Han M-W. Shape Memory Alloys Patches to Mimic Rolling, Sliding, and Spinning Movements of the Knee. Biomimetics. 2024; 9(5):255. https://doi.org/10.3390/biomimetics9050255
Chicago/Turabian StyleSeo, Suyeon, Minchae Kang, and Min-Woo Han. 2024. "Shape Memory Alloys Patches to Mimic Rolling, Sliding, and Spinning Movements of the Knee" Biomimetics 9, no. 5: 255. https://doi.org/10.3390/biomimetics9050255
APA StyleSeo, S., Kang, M., & Han, M.-W. (2024). Shape Memory Alloys Patches to Mimic Rolling, Sliding, and Spinning Movements of the Knee. Biomimetics, 9(5), 255. https://doi.org/10.3390/biomimetics9050255