
Serval Optimization Algorithm: A New Bio-Inspired Approach for Solving Optimization Problems


Abstract
1. Introduction
- SOA is a nature-inspired approach that simulates natural serval behaviors.
- The essential inspiration of SOA is the serval strategy when hunting in three stages: selection, attack, and chase.
- The mathematical model of SOA is presented in two phases: exploration and exploitation.
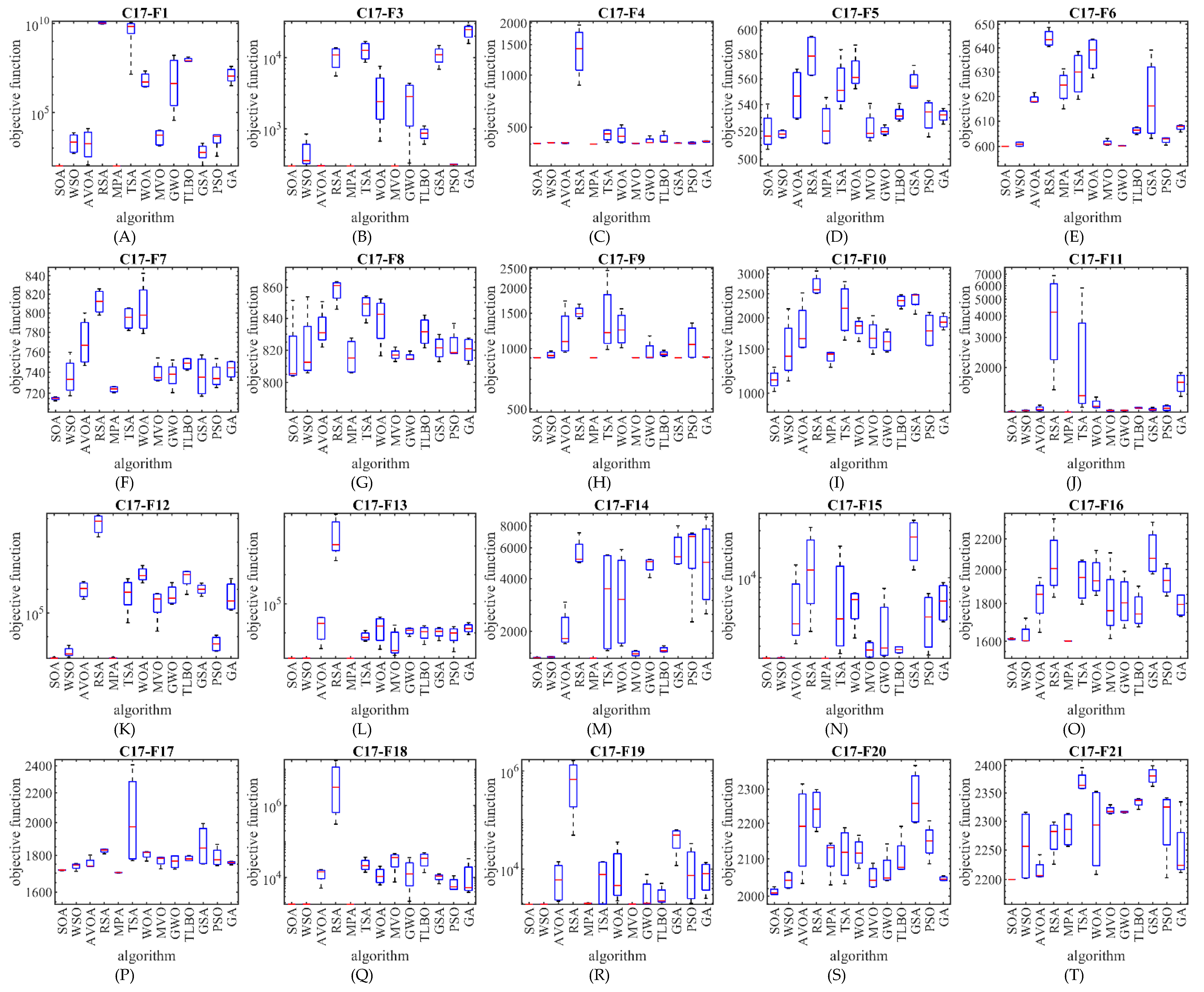
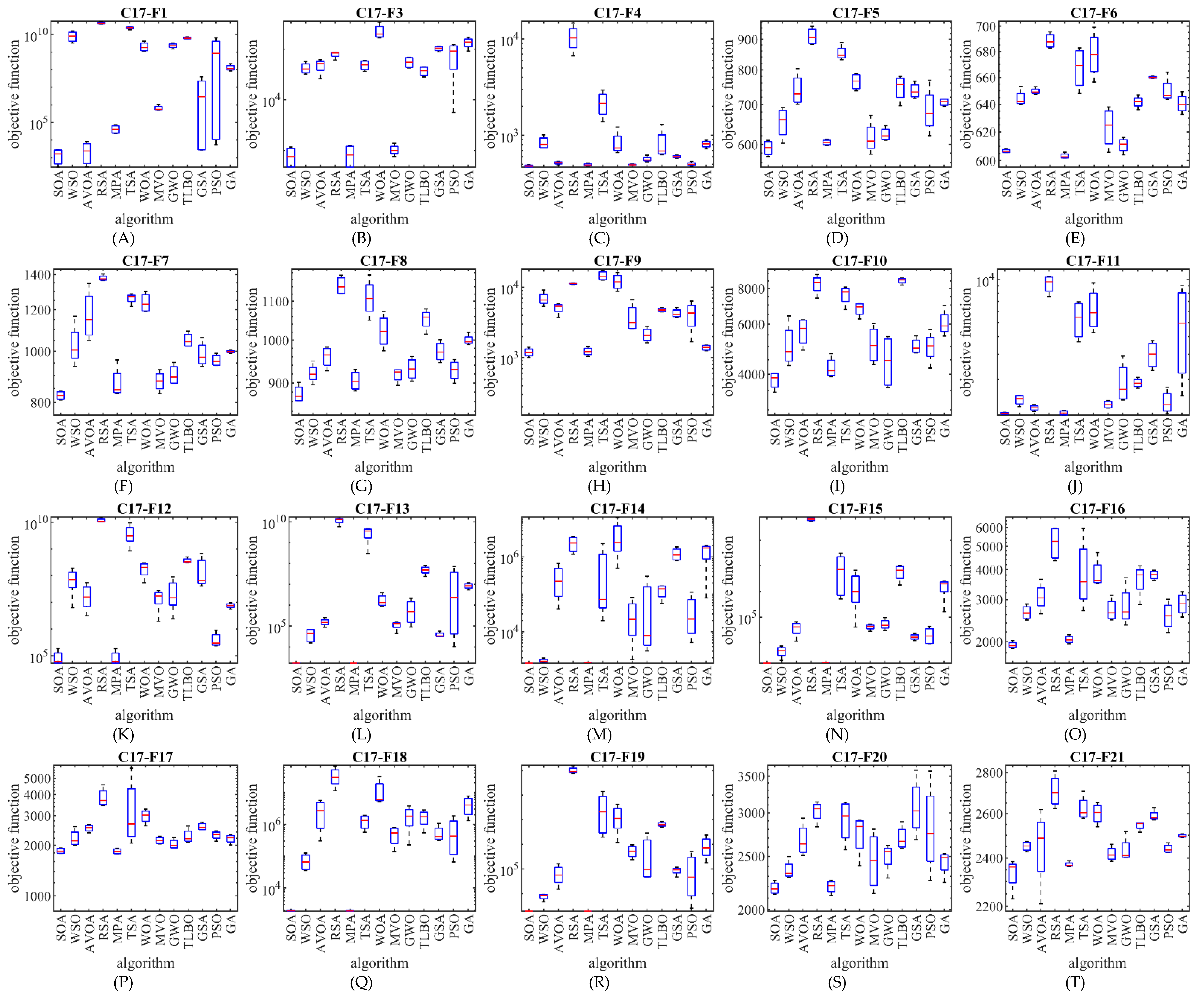
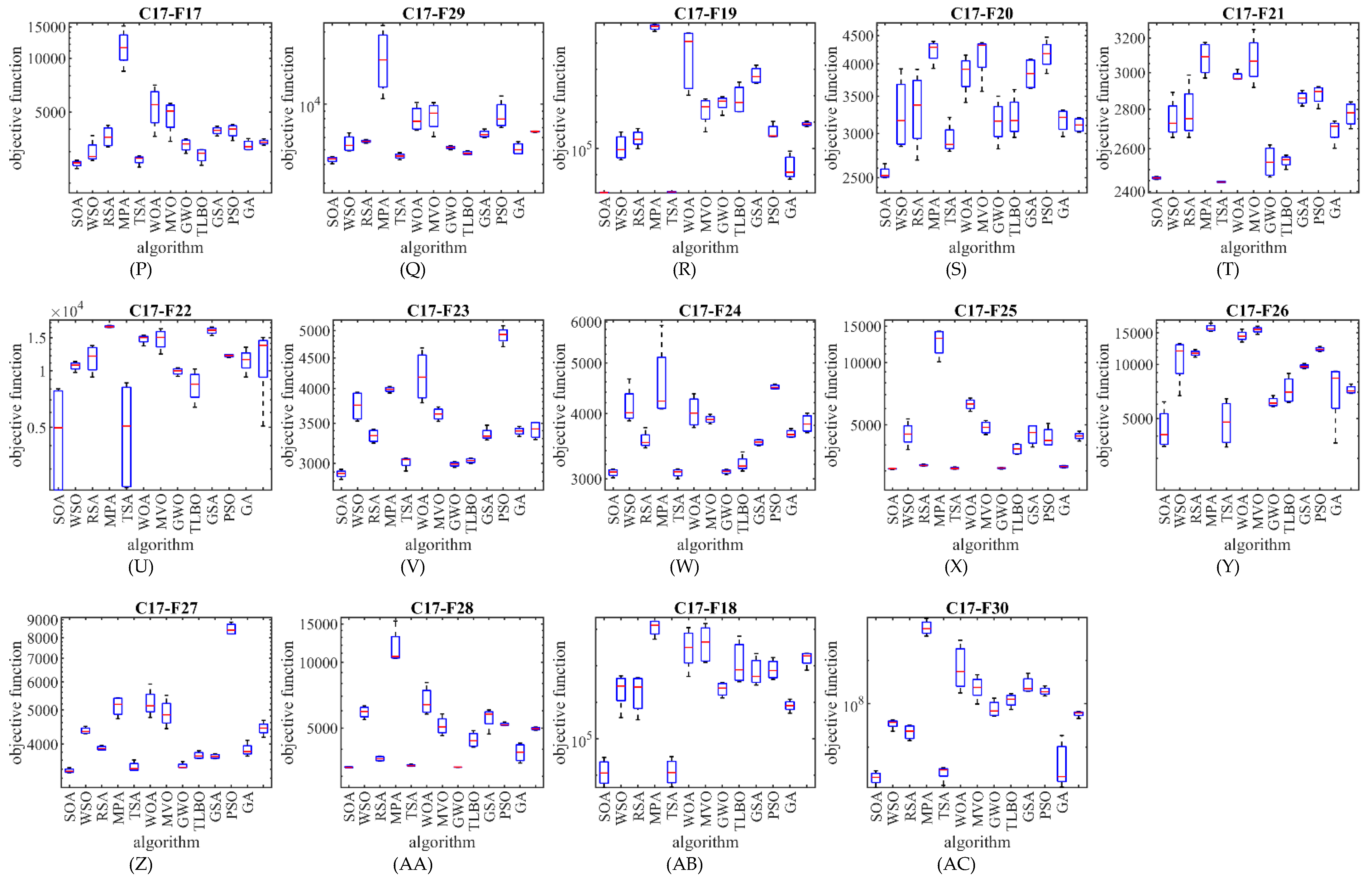
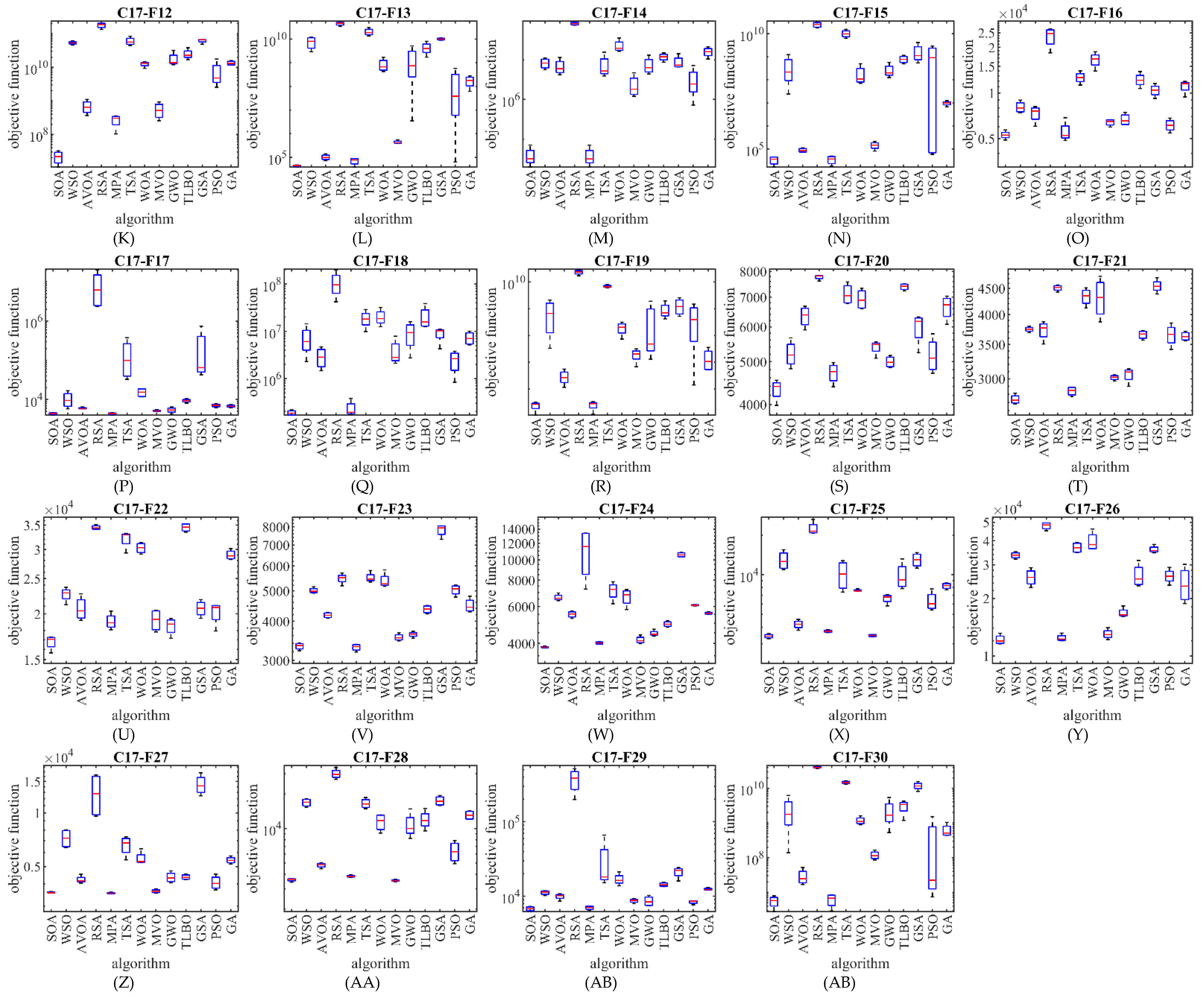
- SOA capability is benchmarked in optimizing the CEC 2017 and CEC 2019 test suites.
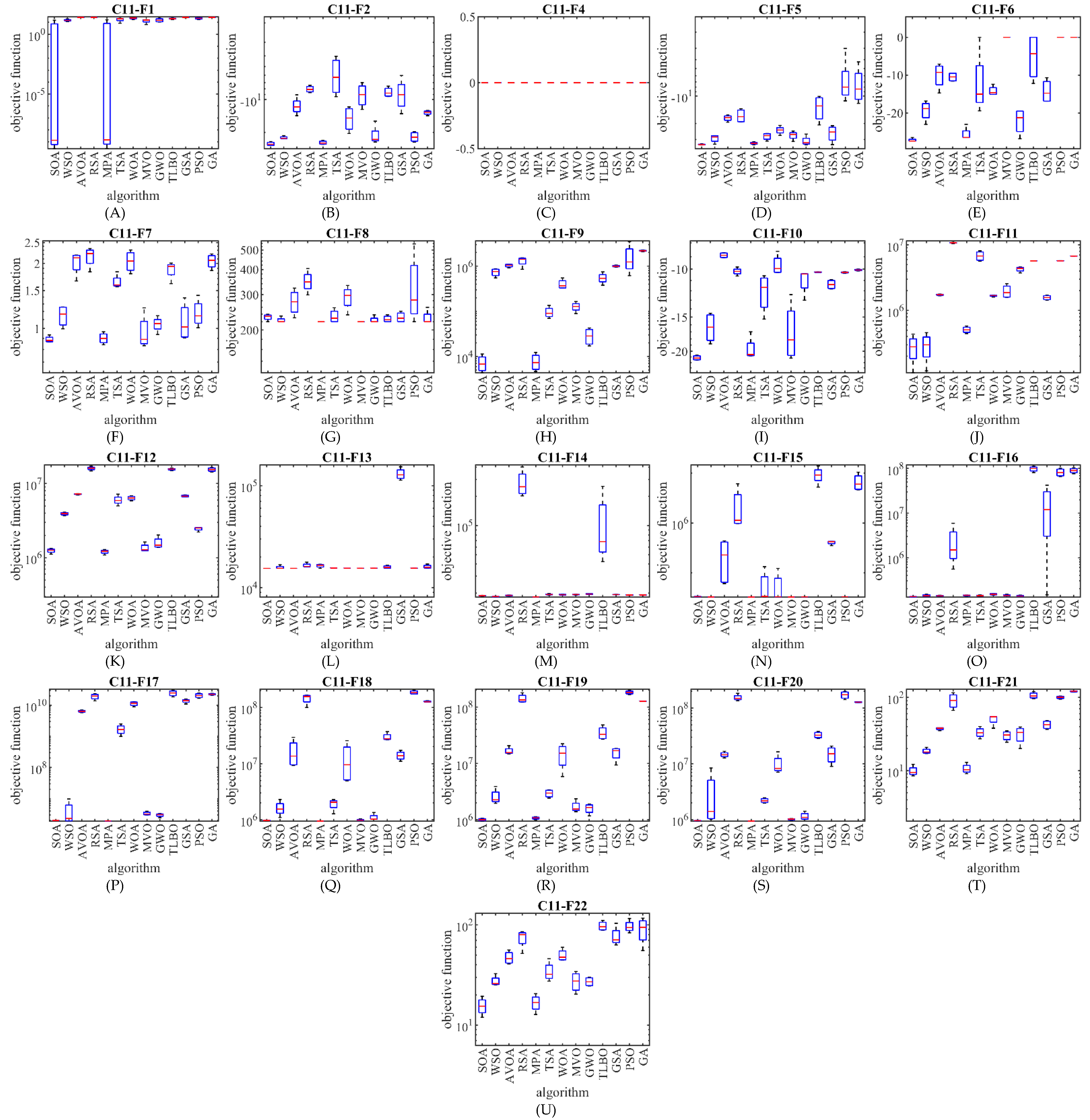
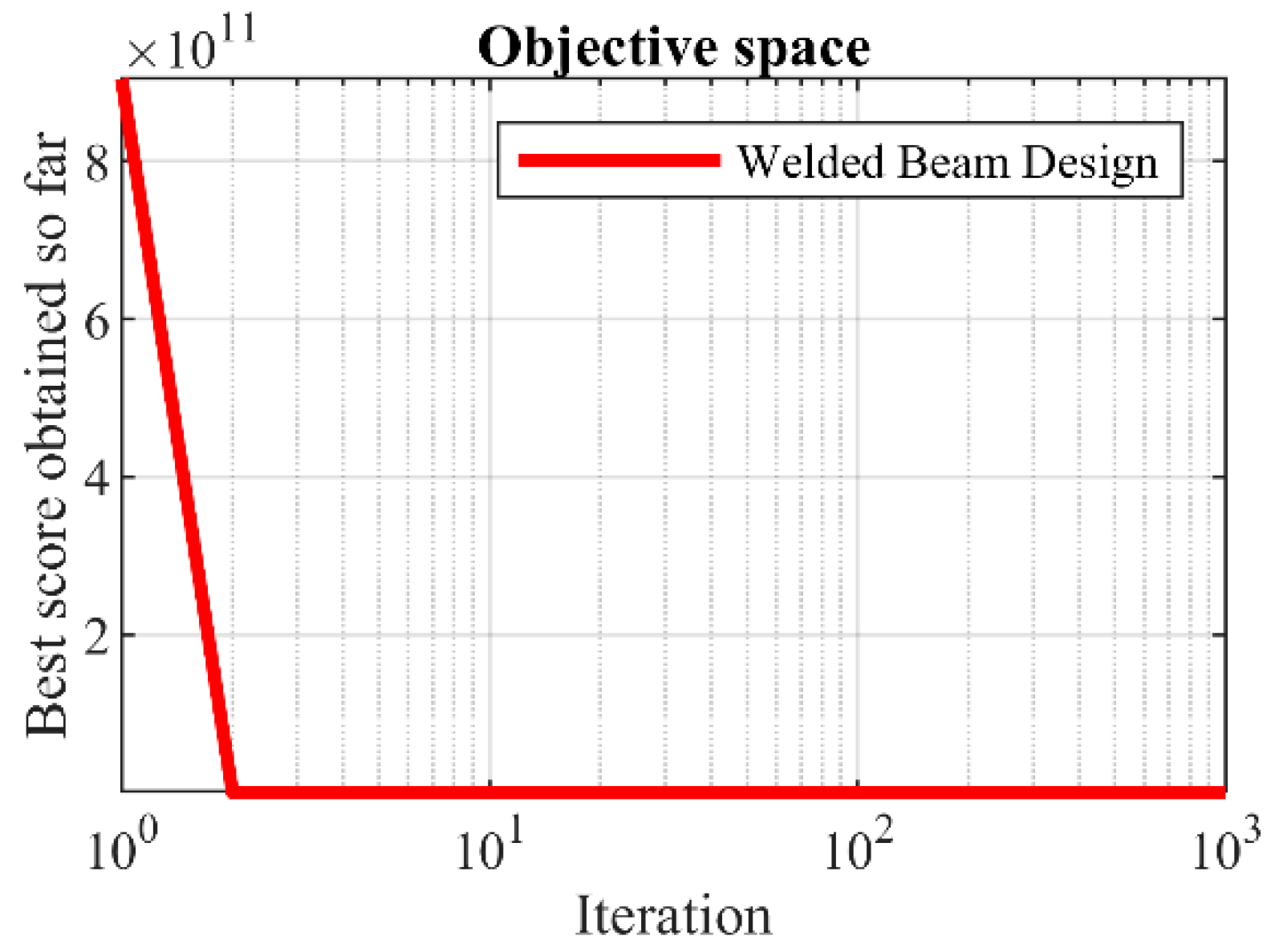
- The performance of SOA in handling real-world applications is evaluated on the CEC 2011 test suite and four engineering design challenges.
- The performance of the proposed SOA approach is challenged in comparison with twelve well-known metaheuristic algorithms.
2. Literature Review
3. Serval Optimization Algorithm
3.1. Inspiration of SOA
3.2. Algorithm Initialization
3.3. Mathematical Modelling of SOA
3.3.1. Phase 1: Prey Selection and Attacking (Exploration)
3.3.2. Phase 2: Chase Process (Exploitation)
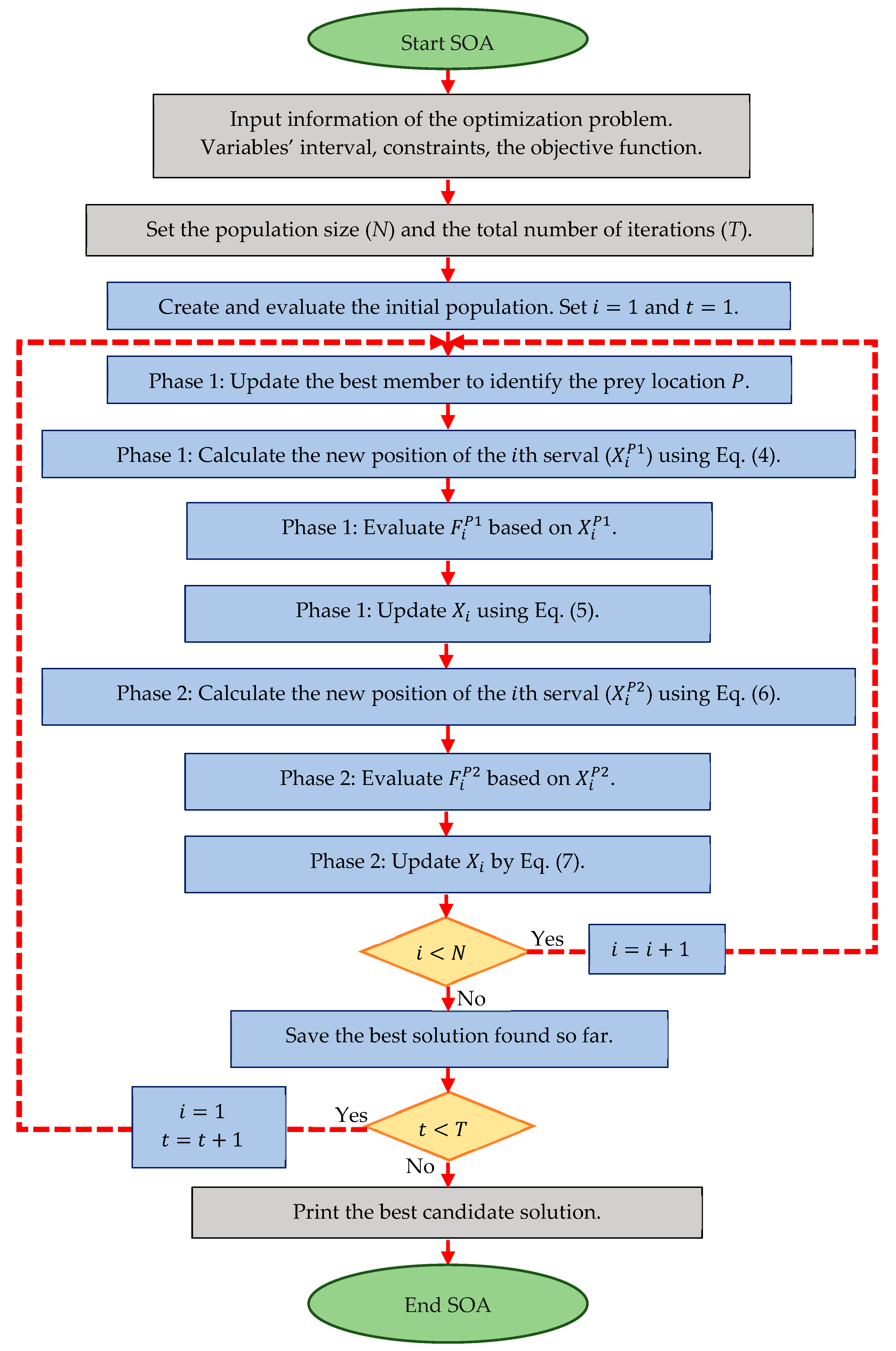
3.4. Repetition Process, Pseudocode, and Flowchart of SOA
| Algorithm 1 Pseudocode of the SOA. |
| Start SOA. |
| 1. Input problem information: variables, the objective function, and constraints. |
| 2. Set the population size (N) and the total number of iterations (T) |
| 3. Generate the initial population matrix at random. |
| 4. Evaluate the objective function. |
| 5. For t = 1 to N |
| 6. For i = 1 to N |
| 7. Phase 1: Prey selection and attacking (exploration) |
| 8. Update the best member of population as prey location. |
| 9. Calculate the new position of the ith SOA member based on attack simulation using Equation (4). |
| 10. Update the ith SOA member using Equation (5). |
| 11. Phase 2: Chase process (exploitation) |
| 12. Calculate new position of the ith SOA member based on simulation the chase using Equation (6). |
| 13. Update the ith SOA member using Equation (7). |
| 14. end |
| 15. Save the best candidate solution so far. |
| 16. end. |
| 17. Output the best quasi-optimal solution obtained with the SOA. |
| End SOA. |
3.5. Computational Complexity of SOA
4. Simulation Studies and Results
4.1. Evaluation the CEC 2017 Test Suite
4.2. Evaluation the CEC 2019 Test Suite
4.3. Statistical Analysis
5. SOA for Real-World Applications
5.1. Evaluation the CEC 2011 Test Suite
5.2. The SOA Testing on Engineering Optimization Problems
5.2.1. Pressure Vessel Design Problem
5.2.2. Speed Reducer Design Problem
5.2.3. Welded Beam Design
5.2.4. Tension/Compression Spring Design
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, S.; Zhang, T.; Ma, S.; Chen, M. Dandelion Optimizer: A nature-inspired metaheuristic algorithm for engineering applications. Eng. Appl. Artif. Intell. 2022, 114, 105075. [Google Scholar] [CrossRef]
- Jahani, E.; Chizari, M. Tackling global optimization problems with a novel algorithm-Mouth Brooding Fish algorithm. Appl. Soft Comput. 2018, 62, 987–1002. [Google Scholar] [CrossRef]
- Sergeyev, Y.D.; Kvasov, D.; Mukhametzhanov, M. On the efficiency of nature-inspired metaheuristics in expensive global optimization with limited budget. Sci. Rep. 2018, 8, 1–9. [Google Scholar] [CrossRef]
- Liberti, L.; Kucherenko, S. Comparison of deterministic and stochastic approaches to global optimization. Int. Trans. Oper. Res. 2005, 12, 263–285. [Google Scholar] [CrossRef]
- Koc, I.; Atay, Y.; Babaoglu, I. Discrete tree seed algorithm for urban land readjustment. Eng. Appl. Artif. Intell. 2022, 112, 104783. [Google Scholar] [CrossRef]
- Renard, P.; Alcolea, A.; Ginsbourger, D. Stochastic versus deterministic approaches. Environ. Model. Find. Simplicity Complex. 2013, 8, 133–149. [Google Scholar]
- Dehghani, M.; Trojovská, E.; Trojovský, P. A new human-based metaheuristic algorithm for solving optimization problems on the base of simulation of driving training process. Sci. Rep. 2022, 12, 9924. [Google Scholar] [CrossRef] [PubMed]
- Zeidabadi, F.-A.; Dehghani, M.; Trojovský, P.; Hubálovský, Š.; Leiva, V.; Dhiman, G. Archery Algorithm: A Novel Stochastic Optimization Algorithm for Solving Optimization Problems. Comput. Mater. Contin. 2022, 72, 399–416. [Google Scholar] [CrossRef]
- De Armas, J.; Lalla-Ruiz, E.; Tilahun, S.L.; Voß, S. Similarity in metaheuristics: A gentle step towards a comparison methodology. Nat. Comput. 2022, 21, 265–287. [Google Scholar] [CrossRef]
- Trojovská, E.; Dehghani, M.; Trojovský, P. Zebra Optimization Algorithm: A New Bio-Inspired Optimization Algorithm for Solving Optimization Algorithm. IEEE Access 2022, 10, 49445–49473. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Dehghani, A.; Malik, O.P.; Morales-Menendez, R.; Dhiman, G.; Nouri, N.; Ehsanifar, A.; Guerrero, J.M.; Ramirez-Mendoza, R.A. Binary spring search algorithm for solving various optimization problems. Appl. Sci. 2021, 11, 1286. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization, Proceedings of ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Perth, WA, Australia, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Karaboga, D.; Basturk, B. Artificial Bee Colony (ABC) Optimization Algorithm for Solving Constrained Optimization Problems; International fuzzy systems association world congress; Springer: Berlin/Heidelberg, Germany, 2007; pp. 789–798. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Trojovská, E.; Trojovský, P. Coati Optimization Algorithm: A new bio-inspired metaheuristic algorithm for solving optimization problems. Knowl. Based Syst. 2022, 259, 110011. [Google Scholar] [CrossRef]
- Abualigah, L.; Abd Elaziz, M.; Sumari, P.; Geem, Z.W.; Gandomi, A.H. Reptile Search Algorithm (RSA): A nature-inspired meta-heuristic optimizer. Expert Syst. Appl. 2022, 191, 116158. [Google Scholar] [CrossRef]
- Braik, M.; Hammouri, A.; Atwan, J.; Al-Betar, M.A.; Awadallah, M.A. White Shark Optimizer: A novel bio-inspired meta-heuristic algorithm for global optimization problems. Knowl. Based Syst. 2022, 243, 108457. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Hussain, K.; Mabrouk, M.S.; Al-Atabany, W. Honey Badger Algorithm: New metaheuristic algorithm for solving optimization problems. Math. Comput. Simul. 2022, 192, 84–110. [Google Scholar] [CrossRef]
- Chopra, N.; Ansari, M.M. Golden Jackal Optimization: A Novel Nature-Inspired Optimizer for Engineering Applications. Expert Syst. Appl. 2022, 198, 116924. [Google Scholar] [CrossRef]
- Abdollahzadeh, B.; Gharehchopogh, F.S.; Mirjalili, S. African vultures optimization algorithm: A new nature-inspired metaheuristic algorithm for global optimization problems. Comput. Ind. Eng. 2021, 158, 107408. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Kaur, S.; Awasthi, L.K.; Sangal, A.L.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Holland, J.H. Genetic Algorithms and Machine Learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Dhiman, G.; Malik, O.; Morales-Menendez, R.; Ramirez-Mendoza, R.A.; Dehghani, A.; Guerrero, J.M.; Parra-Arroyo, L. A spring search algorithm applied to engineering optimization problems. Appl. Sci. 2020, 10, 6173. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Dehghani, M.; Samet, H. Momentum search algorithm: A new meta-heuristic optimization algorithm inspired by momentum conservation law. SN Appl. Sci. 2020, 2, 1–15. [Google Scholar] [CrossRef]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm–A novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110, 151–166. [Google Scholar] [CrossRef]
- Hatamlou, A. Black hole: A new heuristic optimization approach for data clustering. Inf. Sci. 2013, 222, 175–184. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl. Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Cuevas, E.; Oliva, D.; Zaldivar, D.; Pérez-Cisneros, M.; Sossa, H. Circle detection using electro-magnetism optimization. Inf. Sci. 2012, 182, 40–55. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2021, 51, 1531–1551. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras, A. A novel meta-heuristic optimization algorithm: Thermal exchange optimization. Adv. Eng. Softw. 2017, 110, 69–84. [Google Scholar] [CrossRef]
- Pereira, J.L.J.; Francisco, M.B.; Diniz, C.A.; Oliver, G.A.; Cunha Jr, S.S.; Gomes, G.F. Lichtenberg algorithm: A novel hybrid physics-based meta-heuristic for global optimization. Expert Syst. Appl. 2021, 170, 114522. [Google Scholar] [CrossRef]
- Dehghani, M.; Mardaneh, M.; Guerrero, J.M.; Malik, O.; Kumar, V. Football game based optimization: An application to solve energy commitment problem. Int. J. Intell. Eng. Syst. 2020, 13, 514–523. [Google Scholar] [CrossRef]
- Moghdani, R.; Salimifard, K. Volleyball premier league algorithm. Appl. Soft Comput. 2018, 64, 161–185. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Givi, H.; Guerrero, J.M.; Dhiman, G. Darts game optimizer: A new optimization technique based on darts game. Int. J. Intell. Eng. Syst. 2020, 13, 286–294. [Google Scholar] [CrossRef]
- Zeidabadi, F.A.; Dehghani, M. POA: Puzzle Optimization Algorithm. Int. J. Intell. Eng. Syst. 2022, 15, 273–281. [Google Scholar]
- Dehghani, M.; Montazeri, Z.; Saremi, S.; Dehghani, A.; Malik, O.P.; Al-Haddad, K.; Guerrero, J.M. HOGO: Hide objects game optimization. Int. J. Intell. Eng. Syst. 2020, 13, 216–225. [Google Scholar] [CrossRef]
- Kaveh, A.; Zolghadr, A. A novel Meta-Heuristic algorithm: Tug of war optimization. Int. J. Optim. Civ. Eng. 2016, 6, 469–492. [Google Scholar]
- Rao, R.V.; Savsani, V.J.; Vakharia, D. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput. Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Dehghani, M.; Trojovský, P. Teamwork Optimization Algorithm: A New Optimization Approach for Function Minimization/Maximization. Sensors 2021, 21, 4567. [Google Scholar] [CrossRef]
- Dehghani, M.; Mardaneh, M.; Guerrero, J.M.; Malik, O.P.; Ramirez-Mendoza, R.A.; Matas, J.; Vasquez, J.C.; Parra-Arroyo, L. A new “Doctor and Patient” optimization algorithm: An application to energy commitment problem. Appl. Sci. 2020, 10, 5791. [Google Scholar] [CrossRef]
- Braik, M.; Ryalat, M.H.; Al-Zoubi, H. A novel meta-heuristic algorithm for solving numerical optimization problems: Ali Baba and the forty thieves. Neural Comput. Appl. 2022, 34, 409–455. [Google Scholar] [CrossRef]
- Al-Betar, M.A.; Alyasseri, Z.A.A.; Awadallah, M.A.; Abu Doush, I. Coronavirus herd immunity optimizer (CHIO). Neural Comput. Appl. 2021, 33, 5011–5042. [Google Scholar] [CrossRef]
- Ayyarao, T.L.; RamaKrishna, N.; Elavarasam, R.M.; Polumahanthi, N.; Rambabu, M.; Saini, G.; Khan, B.; Alatas, B. War Strategy Optimization Algorithm: A New Effective Metaheuristic Algorithm for Global Optimization. IEEE Access 2022, 10, 25073–25105. [Google Scholar] [CrossRef]
- Mohamed, A.W.; Hadi, A.A.; Mohamed, A.K. Gaining-sharing knowledge based algorithm for solving optimization problems: A novel nature-inspired algorithm. Int. J. Mach. Learn. Cybern. 2020, 11, 1501–1529. [Google Scholar] [CrossRef]
- Smithers, R.H. The serval Felis serval Schreber, 1776. South Afr. J. Wildl. Res. 24-Mon. Delayed Open Access 1978, 8, 29–37. [Google Scholar]
- Awad, N.; Ali, M.; Liang, J.; Qu, B.; Suganthan, P.; Definitions, P. Evaluation criteria for the CEC 2017 special session and competition on single objective real-parameter numerical optimization. Technol. Rep. 2016, 5–8, 3126–3133. [Google Scholar]
- Price, K.V.; Awad, N.H.; Ali, M.Z.; Suganthan, P.N. Problem Definitions and Evaluation Criteria for the 100-Digit Challenge Special Session and Competition on Single Objective Numerical Optimization; Nanyang Technological University: Singapore, Singapore, 2018. [Google Scholar]
- Wilcoxon, F. Individual comparisons by ranking methods. In Breakthroughs in Statistics; Springer: Berlin/Heidelberg, Germany, 1992; pp. 196–202. [Google Scholar]
- Das, S.; Suganthan, P.N. Problem definitions and evaluation criteria for CEC 2011 competition on testing evolutionary algorithms on real world optimization problems. Jadavpur Univ. Nanyang Technol. Univ. Kolkata 2010, 6, 341–359. [Google Scholar]
- Kannan, B.; Kramer, S.N. An augmented Lagrange multiplier based method for mixed integer discrete continuous optimization and its applications to mechanical design. J. Mech. Des. 1994, 116, 405–411. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Yang, X.-S. Benchmark problems in structural optimization. In Computational Optimization, Methods and Algorithms; Springer: Berlin/Heidelberg, Germany, 2011; pp. 259–281. [Google Scholar]
- Mezura-Montes, E.; Coello, C.A.C. Useful Infeasible Solutions in Engineering Optimization with Evolutionary Algorithms; Mexican international conference on artificial intelligence; Springer: Berlin/Heidelberg, Germany, 2005; pp. 652–662. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter | Value |
|---|---|---|
| GA | ||
| Type | Real coded | |
| Selection | Roulette wheel (Proportionate) | |
| Crossover | Whole arithmetic (, ) | |
| Mutation | Gaussian () | |
| PSO | ||
| Topology | Fully connected | |
| Cognitive and social constant | ||
| Inertia weight | Linear reduction from 0.9 to 0.1 | |
| Velocity limit | 10% of dimension range | |
| GSA | ||
| Alpha, , , | 20, 100, 2, 1 | |
| TLBO | ||
| teaching factor | ||
| random number | rand is a random number between . | |
| GWO | ||
| Convergence parameter (a) | a: Linear reduction from 2 to 0. | |
| MVO | ||
| wormhole existence probability (WEP) | and . | |
| Exploitation accuracy over the iterations (p) | . | |
| WOA | ||
| Convergence parameter (a) | a: Linear reduction from 2 to 0. | |
| r is a random vector in | ||
| l is a random number from | ||
| TSA | ||
| 1, 4 | ||
| random numbers lie in the interval | ||
| MPA | ||
| Constant number | ||
| Random vector | is a vector of uniform random numbers in | |
| Fish Aggregating Devices (FADs) | ||
| Binary vector | or 1 | |
| RSA | ||
| Sensitive parameter | ||
| Sensitive parameter | ||
| Evolutionary Sense (ES) | ES: randomly decreasing values between 2 and −2 | |
| AVOA | ||
| 0.8, 0.2 | ||
| 2.5 | ||
| 0.6, 0.4, 0.6 | ||
| WSO | ||
| 0.07, 0.75 | ||
| 4.125, 6.25, 100, 0.0005 |
| SOA | WSO | AVOA | RSA | MPA | TSA | WOA | MVO | GWO | TLBO | GSA | PSO | GA | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C17-F1 | mean | 100.827 | 3072.047 | 4092.864 | 1.09 × 1010 | 100 | 6.28 × 109 | 8734,850 | 5565.472 | 43,130,985 | 92,363,844 | 789.6176 | 3796.408 | 16,141,320 |
| best | 100.5137 | 501.1341 | 116.6581 | 9.41 × 109 | 100 | 14,208,120 | 2734,095 | 1329.943 | 36,727.39 | 75,427,798 | 100.0205 | 352.658 | 3,264,472 | |
| worst | 100.9824 | 7395.231 | 12,699.46 | 1.3 × 1010 | 100 | 1.15 × 1010 | 21,710,549 | 10,084.16 | 1.64 × 108 | 1.31 × 108 | 1902.646 | 5631.975 | 38,820,667 | |
| std | 0.214676 | 3233.023 | 5877.613 | 1.61 × 109 | 5.28 × 10−6 | 4.84× 109 | 8,902,280 | 4689.867 | 80,613,752 | 26,120,139 | 779.9287 | 2493.307 | 15,706,283 | |
| median | 100.9061 | 2195.912 | 1777.667 | 1.06 × 1010 | 100 | 6.82× 109 | 5,247,378 | 5423.893 | 4,281,710 | 81,580,648 | 577.9017 | 4600.499 | 11,240,071 | |
| rank | 2 | 4 | 6 | 13 | 1 | 12 | 8 | 7 | 10 | 11 | 3 | 5 | 9 | |
| C17-F3 | mean | 300 | 464.5135 | 302.0192 | 10,267.95 | 300 | 12,685.25 | 3260.516 | 300.0635 | 2593.578 | 858.8106 | 10,918.38 | 315.5806 | 23,430.61 |
| best | 300 | 300.1927 | 300 | 5527.263 | 300 | 8573.571 | 669.5847 | 300.0286 | 329.8934 | 607.0993 | 6863.28 | 313.0498 | 15,808.63 | |
| worst | 300 | 844.4021 | 304.319 | 13,744.58 | 300 | 16,868.14 | 7558.956 | 300.1108 | 4362.243 | 1095.099 | 14,847.31 | 319.4459 | 28,582.79 | |
| std | 1.89 × 10−13 | 254.8057 | 2.342749 | 3757.315 | 4.04 × 10−11 | 3775.747 | 2994.478 | 0.038787 | 1853.797 | 199.5407 | 3293.007 | 2.79139 | 5569.145 | |
| median | 300 | 356.7296 | 301.8789 | 10,899.98 | 300 | 12,649.64 | 2406.762 | 300.0573 | 2841.088 | 866.5219 | 10,981.47 | 314.9134 | 24,665.52 | |
| rank | 1 | 6 | 4 | 10 | 2 | 12 | 9 | 3 | 8 | 7 | 11 | 5 | 13 | |
| C17-F4 | mean | 403.0484 | 407.2957 | 405.0707 | 1414.847 | 400 | 452.2675 | 452.3776 | 403.3356 | 417.5088 | 429.1642 | 404.8591 | 405.1688 | 413.6139 |
| best | 402.5089 | 406.6334 | 401.3246 | 874.8043 | 400 | 408.4697 | 407.1862 | 400.7995 | 407.7759 | 410.0639 | 403.8009 | 400.3294 | 408.6659 | |
| worst | 403.9619 | 407.9785 | 406.9653 | 1943.823 | 400 | 484.0319 | 516.3257 | 405.041 | 446.4927 | 474.1362 | 406.4845 | 411.3318 | 417.5843 | |
| std | 0.64045 | 0.610881 | 2.657606 | 456.3131 | 2.19 × 10−7 | 35.3625 | 51.19739 | 1.911616 | 19.32268 | 30.32581 | 1.230735 | 5.510745 | 4.388246 | |
| median | 402.8615 | 407.2854 | 405.9964 | 1420.38 | 400 | 458.2842 | 442.9992 | 403.751 | 407.8834 | 416.2283 | 404.5755 | 404.5069 | 414.1026 | |
| rank | 2 | 7 | 5 | 13 | 1 | 11 | 12 | 3 | 9 | 10 | 4 | 6 | 8 | |
| C17-F5 | mean | 520.0481 | 517.9215 | 547.3819 | 578.3821 | 524.1491 | 555.48 | 565.3388 | 522.6386 | 520.2654 | 532.6729 | 557.956 | 531.8387 | 531.6347 |
| best | 506.9647 | 514.9671 | 528.8537 | 562.5519 | 510.9445 | 536.7252 | 552.0922 | 512.9368 | 516.9173 | 527.4993 | 552.7326 | 515.9198 | 525.2321 | |
| worst | 540.3655 | 520.8979 | 567.6569 | 594.5714 | 545.3806 | 583.5143 | 587.2286 | 540.7974 | 524.6775 | 540.5986 | 570.6416 | 542.783 | 537.0252 | |
| std | 14.40665 | 2.916079 | 20.38514 | 17.75947 | 16.24505 | 19.95166 | 15.19038 | 12.38441 | 3.301751 | 5.610836 | 8.573295 | 12.1854 | 4.905863 | |
| median | 516.4311 | 517.9106 | 546.5084 | 578.2025 | 520.1356 | 550.8402 | 561.0172 | 518.4101 | 519.7334 | 531.2967 | 554.225 | 534.326 | 532.1407 | |
| rank | 2 | 1 | 9 | 13 | 5 | 10 | 12 | 4 | 3 | 8 | 11 | 7 | 6 | |
| C17-F6 | mean | 600.0008 | 600.8465 | 618.7414 | 644.0479 | 623.8526 | 629.3204 | 637.3912 | 601.3458 | 600.1938 | 606.3029 | 618.6179 | 602.4556 | 607.4921 |
| best | 600.0001 | 600.0026 | 617.6546 | 640.5716 | 614.9259 | 618.7987 | 627.5706 | 600.5279 | 600.1227 | 604.6819 | 603.1557 | 600.4931 | 605.6483 | |
| worst | 600.0024 | 601.6626 | 621.5024 | 648.6505 | 631.2704 | 638.4976 | 643.6766 | 603.0893 | 600.3623 | 607.7053 | 639.1099 | 603.3747 | 608.445 | |
| std | 0.001059 | 0.916838 | 1.846013 | 3.630547 | 6.802204 | 9.123253 | 7.55601 | 1.179296 | 0.113824 | 1.335779 | 16.6334 | 1.356157 | 1.252703 | |
| median | 600.0003 | 600.8604 | 617.9043 | 643.4847 | 624.607 | 629.9926 | 639.1589 | 600.8831 | 600.145 | 606.4122 | 616.1031 | 602.9772 | 607.9374 | |
| rank | 1 | 3 | 9 | 13 | 10 | 11 | 12 | 4 | 2 | 6 | 8 | 5 | 7 | |
| C17-F7 | mean | 714.9232 | 735.8553 | 770.0335 | 812.0262 | 723.6362 | 794.4765 | 804.2404 | 738.9214 | 737.1898 | 748.3656 | 736.1961 | 736.6172 | 742.9681 |
| best | 712.7689 | 717.4734 | 746.6222 | 797.7337 | 720.2506 | 781.8441 | 778.6661 | 731.8761 | 720.4588 | 742.0222 | 717.1787 | 725.272 | 732.2879 | |
| worst | 716.4969 | 759.7501 | 800.0727 | 825.7699 | 726.113 | 805.1441 | 842.8269 | 754.0978 | 752.0498 | 753.5933 | 757.0473 | 753.4337 | 750.6899 | |
| std | 1.562194 | 17.9943 | 24.60583 | 13.16748 | 2.810547 | 11.91296 | 28.10275 | 10.33946 | 12.94484 | 5.913658 | 19.72524 | 12.12503 | 8.93704 | |
| median | 715.2135 | 733.0988 | 766.7196 | 812.3006 | 724.0905 | 795.4589 | 797.7343 | 734.8559 | 738.1253 | 748.9235 | 735.2791 | 733.8816 | 744.4474 | |
| rank | 1 | 3 | 10 | 13 | 2 | 11 | 12 | 7 | 6 | 9 | 4 | 5 | 8 | |
| C17-F8 | mean | 816.6276 | 821.1931 | 833.5798 | 858.0199 | 815.9157 | 847.5389 | 838.4987 | 817.1652 | 815.6853 | 831.6274 | 821.3916 | 822.884 | 820.143 |
| best | 803.9798 | 805.9698 | 821.8891 | 845.8319 | 805.9698 | 837.1798 | 816.4064 | 812.9367 | 814.2627 | 821.404 | 812.9345 | 817.9092 | 811.2669 | |
| worst | 851.586 | 853.9211 | 850.7427 | 863.7385 | 827.5538 | 854.4324 | 852.3891 | 821.8906 | 819.3457 | 842.065 | 829.8487 | 836.8133 | 827.5287 | |
| std | 23.31975 | 22.21323 | 12.1958 | 8.256772 | 11.06309 | 7.741079 | 15.84329 | 3.666664 | 2.45444 | 9.1537 | 7.197692 | 9.298061 | 7.809856 | |
| median | 805.4723 | 812.4407 | 830.8436 | 861.2546 | 815.0695 | 849.2718 | 842.5997 | 816.9166 | 814.5663 | 831.5204 | 821.3916 | 818.4067 | 820.8881 | |
| rank | 3 | 6 | 10 | 13 | 2 | 12 | 11 | 4 | 1 | 9 | 7 | 8 | 5 | |
| C17-F9 | mean | 900.3851 | 929.3131 | 1211.93 | 1514.186 | 900 | 1458.039 | 1265.415 | 900.2293 | 965.985 | 941.6624 | 900 | 1084.117 | 905.2287 |
| best | 900.015 | 900.0012 | 958.169 | 1410.468 | 900 | 990.2664 | 1008.524 | 900.0018 | 900.5441 | 913.7529 | 900 | 900.9737 | 901.4811 | |
| worst | 901.011 | 971.5927 | 1724.097 | 1663.035 | 900 | 2444.594 | 1578.136 | 900.9101 | 1155.325 | 980.4159 | 900 | 1338.977 | 907.1148 | |
| std | 0.471982 | 34.89239 | 354.9109 | 107.5417 | 2.05 × 10−8 | 667.1913 | 251.4761 | 0.453875 | 126.2692 | 28.21168 | 0 | 216.6576 | 2.557814 | |
| median | 900.2572 | 922.8293 | 1082.726 | 1491.62 | 900 | 1198.649 | 1237.501 | 900.0026 | 904.0356 | 936.2405 | 900 | 1048.258 | 906.1594 | |
| rank | 4 | 6 | 10 | 13 | 2 | 12 | 11 | 3 | 8 | 7 | 1 | 9 | 5 | |
| C17-F10 | mean | 1136.471 | 1525.5 | 1833.3 | 2692.02 | 1398.269 | 2196.056 | 1831.813 | 1696.621 | 1618.109 | 2333.778 | 2369.988 | 1799.815 | 1931.023 |
| best | 1015.317 | 1118.755 | 1517.483 | 2508.239 | 1269.37 | 1628.727 | 1611.271 | 1431.721 | 1460.399 | 2172.52 | 2069.602 | 1548.165 | 1789.372 | |
| worst | 1269.761 | 2173.755 | 2515.046 | 3078.344 | 1458.036 | 2789.958 | 1998.959 | 2038.82 | 1803.231 | 2471.171 | 2484.022 | 2102.943 | 2091.463 | |
| std | 104.1524 | 455.0288 | 468.3656 | 265.2632 | 87.62248 | 516.1888 | 161.4886 | 255.5049 | 164.4428 | 130.9142 | 200.6485 | 289.059 | 126.6268 | |
| median | 1130.404 | 1404.745 | 1650.336 | 2590.748 | 1432.834 | 2182.769 | 1858.51 | 1657.972 | 1604.402 | 2345.711 | 2463.163 | 1774.075 | 1921.627 | |
| rank | 1 | 3 | 8 | 13 | 2 | 10 | 7 | 5 | 4 | 11 | 12 | 6 | 9 | |
| C17-F11 | mean | 1110.292 | 1124.026 | 1151.953 | 4189.355 | 1101.74 | 2433.766 | 1222.852 | 1122.666 | 1125.431 | 1164.599 | 1141.981 | 1160.628 | 1626.893 |
| best | 1106.88 | 1117.954 | 1118.262 | 1484.117 | 1100.601 | 1175.783 | 1164.024 | 1105.305 | 1113.134 | 1157.099 | 1121.042 | 1117.92 | 1359.157 | |
| worst | 1113.47 | 1133.078 | 1209.026 | 6861.324 | 1103.787 | 5818.316 | 1345.834 | 1135.827 | 1132.354 | 1175.083 | 1173.496 | 1208.451 | 1865.215 | |
| std | 2.815898 | 6.45982 | 39.95022 | 2416.697 | 1.417748 | 2258.972 | 83.82071 | 12.94547 | 8.869157 | 8.65636 | 22.38728 | 42.52562 | 221.4175 | |
| median | 1110.408 | 1122.536 | 1140.263 | 4205.989 | 1101.286 | 1370.483 | 1190.775 | 1124.767 | 1128.117 | 1163.106 | 1136.692 | 1158.07 | 1641.6 | |
| rank | 2 | 4 | 7 | 13 | 1 | 12 | 10 | 3 | 5 | 9 | 6 | 8 | 11 | |
| C17-F12 | mean | 1242.422 | 2343.334 | 1,181,918 | 7.58 × 108 | 1233.441 | 1096,381 | 4,964,945 | 370,327 | 756,766.5 | 3,736,063 | 1,095,779 | 5930.549 | 913,806.8 |
| best | 1207.99 | 1359.837 | 382,250 | 1.68 × 108 | 1200.822 | 38,588.44 | 1,889,170 | 17,106.39 | 235,233.1 | 616,984.9 | 509,541 | 2404.891 | 132,160.6 | |
| worst | 1330.82 | 4297.499 | 2,143,478 | 1.32 × 109 | 1320.289 | 2,832,543 | 10,251,735 | 674,113.1 | 1,939,197 | 5,876,192 | 1,853,207 | 11,438.52 | 2,872,053 | |
| std | 59.08526 | 1323.889 | 823,784.1 | 5.85 × 108 | 58.10221 | 1,238,741 | 3,677,451 | 314,405.5 | 801,178.8 | 2,473,613 | 568,776.2 | 4251.026 | 1,315,343 | |
| median | 1215.439 | 1858 | 1,100,971 | 7.69E × 108 | 1206.327 | 757,195.4 | 3,859,438 | 395,044.3 | 426,317.8 | 4,225,537 | 1,010,183 | 4939.391 | 325,507 | |
| rank | 2 | 3 | 10 | 13 | 1 | 9 | 12 | 5 | 6 | 11 | 8 | 4 | 7 | |
| C17-F13 | mean | 1314.651 | 1329.426 | 19,590.41 | 36,919,805 | 1306.198 | 7713.778 | 17,906.98 | 6218.485 | 11,600.44 | 10,709.37 | 10,719.01 | 9477.394 | 14,731.63 |
| best | 1308.406 | 1314.537 | 2827.835 | 3,065,090 | 1301.331 | 5119.752 | 2690.152 | 1643.858 | 7514.508 | 3941.49 | 5323.606 | 2204.365 | 8697.185 | |
| worst | 1318.079 | 1363.912 | 33,636.44 | 1.23 × 108 | 1310.414 | 11,977.73 | 34,896.49 | 18,348.49 | 14,579.42 | 17,269.75 | 15,137.13 | 16,209.74 | 22,062.2 | |
| std | 4.420181 | 23.19983 | 15,927.29 | 57,222,140 | 4.14073 | 3006.084 | 15,038.52 | 8095.684 | 3088.611 | 5648.28 | 4147.954 | 5798.845 | 5591.951 | |
| median | 1316.06 | 1319.628 | 20,948.69 | 11,023,424 | 1306.523 | 6878.815 | 17,020.65 | 2440.796 | 12,153.91 | 10,813.12 | 11,207.65 | 9747.735 | 14,083.57 | |
| rank | 2 | 3 | 12 | 13 | 1 | 5 | 11 | 4 | 9 | 7 | 8 | 6 | 10 | |
| C17-F14 | mean | 1414.72 | 1423.19 | 2068.49 | 5643.20 | 1404.48 | 3501.69 | 3400.44 | 1493.75 | 4803.04 | 1568.78 | 5878.19 | 5869.60 | 5357.57 |
| best | 1412.45 | 1406.97 | 1699.95 | 4926.75 | 1401.00 | 1.55 × 103 | 1648.11 | 1.4 × 103 | 4050 | 1522.97 | 4842 | 2264 | 2517.23 | |
| worst | 1419.77 | 1435.92 | 2935.30 | 7310.20 | 1406.97 | 5.45 × 103 | 5862.66 | 1551 | 5156 | 1652.01 | 8015.69 | 7283 | 8985.62 | |
| std | 3.390648 | 12.24421 | 582.1813 | 1119.612 | 2.50 | 2.21 × 103 | 2049.513 | 5 | 510.9601 | 59.87624 | 1.49 × 103 | 2.41 × 103 | 2913.649 | |
| median | 1413.33 | 1424.93 | 1819.36 | 5167.92 | 1404.98 | 3.50 × 103 | 3.05 × 103 | 1.49 × 103 | 5002.87 | 1550.06 | 5327.38 | 6965.79 | 4963.72 | |
| rank | 2 | 3 | 6 | 11 | 1 | 8 | 7 | 4 | 9 | 5 | 13 | 12 | 10 | |
| C17-F15 | mean | 1512.83 | 1521.97 | 5583.05 | 14,802.85 | 1500.96 | 7545.17 | 5337.48 | 1861.61 | 3291.73 | 1839.96 | 25,559.97 | 4109.45 | 5985.44 |
| best | 1511.37 | 1511.68 | 2115.43 | 2826.68 | 1500.28 | 1.68 × 103 | 2420.26 | 1.54 × 103 | 1575 | 1690.59 | 11,956 | 1622 | 3545.59 | |
| worst | 1514.98 | 1528.08 | 13,461.88 | 32,524.72 | 1502.00 | 2.09 × 104 | 6967.84 | 2255 | 7770 | 1979.28 | 38,417.80 | 6877 | 8873.14 | |
| std | 1.654731 | 7.536983 | 5293.321 | 12967.07 | 0.79 | 9.04 × 103 | 2099.34 | 3.67 × 102 | 2997.628 | 147.988 | 1.26 × 104 | 2.55 × 103 | 2702.172 | |
| median | 1512.50 | 1524.07 | 3377.44 | 11,930.01 | 1500.79 | 3.80 × 103 | 5.98 × 103 | 1.82 × 103 | 1911.17 | 1844.99 | 25,932.99 | 3968.99 | 5761.51 | |
| rank | 2 | 3 | 9 | 12 | 1 | 11 | 8 | 5 | 6 | 4 | 13 | 7 | 10 | |
| C17-F16 | mean | 1611.84 | 1631.96 | 1825.20 | 2047.53 | 1601.43 | 1939.80 | 1958.00 | 1810.13 | 1816.18 | 1764.56 | 2108.53 | 1936.44 | 1791.70 |
| best | 1607.70 | 1602.02 | 1645.36 | 1835.70 | 1600.83 | 1.80 × 103 | 1845.63 | 1.61 × 103 | 1668 | 1673.94 | 1973 | 1842 | 1728.99 | |
| worst | 1615.65 | 1719.59 | 1950.57 | 2341.89 | 1601.90 | 2.06 × 103 | 2123.07 | 2107 | 1990 | 1899.69 | 2317.95 | 2037 | 1848.57 | |
| std | 3.460903 | 58.42219 | 128.574 | 213.7822 | 0.44 | 1.30 × 102 | 120.1071 | 2.10 × 102 | 140.4967 | 99.39318 | 1.57 × 102 | 87.4 | 64.59923 | |
| median | 1612.00 | 1603.12 | 1852.44 | 2006.27 | 1601.49 | 1.95 × 103 | 1.93 × 103 | 1.76 × 103 | 1803.64 | 1742.32 | 2071.58 | 1933.46 | 1794.62 | |
| rank | 2 | 3 | 8 | 12 | 1 | 10 | 11 | 6 | 7 | 4 | 13 | 9 | 5 | |
| C17-F17 | mean | 1716.703 | 1738.518 | 1754.813 | 1827.274 | 1703.13 | 2030.624 | 1805.698 | 1769.854 | 1764.037 | 1782.169 | 1857.806 | 1788.933 | 1757.909 |
| best | 1713.768 | 1710.808 | 1736.971 | 1809.096 | 1701.435 | 1769.61 | 1767.831 | 1723.549 | 1722.862 | 1769.332 | 1751.548 | 1742.054 | 1746.479 | |
| worst | 1719.172 | 1753.339 | 1802.155 | 1837.197 | 1704.773 | 2407.068 | 1821.411 | 1790.076 | 1797.933 | 1799.261 | 1993.65 | 1864.424 | 1765.935 | |
| std | 2.329847 | 18.92729 | 31.64484 | 12.48988 | 1.416707 | 307.1122 | 25.48385 | 31.13371 | 38.49878 | 15.20238 | 123.4642 | 55.24992 | 8.187043 | |
| median | 1716.937 | 1744.963 | 1740.062 | 1831.402 | 1703.157 | 1972.91 | 1816.775 | 1782.896 | 1767.677 | 1780.042 | 1843.013 | 1774.627 | 1759.61 | |
| rank | 2 | 3 | 4 | 11 | 1 | 13 | 10 | 7 | 6 | 8 | 12 | 9 | 5 | |
| C17-F18 | mean | 1814.405 | 1821.362 | 12,583.12 | 6,109,172 | 1801.274 | 23,279.35 | 12,052.7 | 31,257.28 | 15,733.45 | 32,735.85 | 10,284.31 | 6716.702 | 11,959.11 |
| best | 1810.809 | 1808.227 | 5064.639 | 302,305.5 | 1800.582 | 14,032.49 | 6236.408 | 7496.333 | 2186.154 | 13,630.19 | 6724.069 | 4646.373 | 3903.202 | |
| worst | 1819.123 | 1830.204 | 16,593.21 | 17,734,831 | 1801.954 | 36,612.74 | 20,512.16 | 46,205.61 | 35,629.02 | 48,828.46 | 12,582.88 | 11,176.9 | 33,403.2 | |
| std | 3.560254 | 10.39659 | 5168.715 | 8,077,112 | 0.638221 | 9630.484 | 6341.297 | 16,873.78 | 14,345.79 | 15,253.63 | 2500.631 | 3067.479 | 14,314.21 | |
| median | 1813.843 | 1823.509 | 14,337.31 | 3,199,777 | 1801.279 | 21,236.09 | 10,731.12 | 35,663.58 | 12,559.31 | 34,242.38 | 10,915.15 | 5521.766 | 5265.028 | |
| rank | 2 | 3 | 8 | 13 | 1 | 10 | 7 | 11 | 9 | 12 | 5 | 4 | 6 | |
| C17-F19 | mean | 1900.829 | 1906.001 | 7055.795 | 754,594.9 | 1988.096 | 7862.419 | 11,722.22 | 1924.021 | 3422.268 | 2919.764 | 43,205.63 | 12,423.58 | 8045.107 |
| best | 1900.197 | 1902.859 | 2196.819 | 48,985.81 | 1941.345 | 1936.761 | 2247.991 | 1904.848 | 1931.079 | 2082.118 | 11,768.13 | 1992.972 | 2511.267 | |
| worst | 1901.132 | 1911.477 | 14,063.29 | 1621,173 | 2033.869 | 14,054.72 | 35,401.61 | 1943.471 | 7740.098 | 5097.511 | 62,729.71 | 32,949.66 | 13,550.94 | |
| std | 0.426417 | 4.051826 | 5770.348 | 709,246.5 | 37.97119 | 6845.286 | 15,850.82 | 15.98525 | 2879.051 | 1456.032 | 22,823.33 | 14,370.32 | 5195.004 | |
| median | 1900.994 | 1904.834 | 5981.538 | 674,110.5 | 1988.585 | 7729.098 | 4619.639 | 1923.882 | 2008.947 | 2249.714 | 49,162.35 | 7375.847 | 8059.112 | |
| rank | 1 | 2 | 7 | 13 | 4 | 8 | 10 | 3 | 6 | 5 | 12 | 11 | 9 | |
| C17-F20 | mean | 2011.485 | 2042.536 | 2182.848 | 2239.101 | 2108.71 | 2113.828 | 2117.662 | 2049.031 | 2069.477 | 2103.812 | 2271.99 | 2148.104 | 2046.167 |
| best | 2003.98 | 2020.622 | 2033.57 | 2176.378 | 2029.565 | 2032.586 | 2074.137 | 2023.77 | 2040.489 | 2070.52 | 2201.309 | 2086.369 | 2040.594 | |
| worst | 2024.81 | 2065.244 | 2315.735 | 2298.524 | 2143.217 | 2186.926 | 2165.246 | 2088.018 | 2141.267 | 2190.885 | 2371.812 | 2206.599 | 2054.028 | |
| std | 9.604069 | 23.49206 | 126.9386 | 60.11148 | 53.07689 | 71.16499 | 38.70398 | 30.47418 | 48.05391 | 58.21754 | 82.95245 | 49.2503 | 6.047881 | |
| median | 2008.575 | 2042.138 | 2191.043 | 2240.75 | 2131.029 | 2117.899 | 2115.632 | 2042.168 | 2048.075 | 2076.922 | 2257.419 | 2149.723 | 2045.023 | |
| rank | 1 | 2 | 11 | 12 | 7 | 8 | 9 | 4 | 5 | 6 | 13 | 10 | 3 | |
| C17-F21 | mean | 2200 | 2257.378 | 2214.815 | 2272.021 | 2285.241 | 2370.129 | 2286.841 | 2318.856 | 2316.059 | 2333.48 | 2380.593 | 2298.441 | 2248.355 |
| best | 2200 | 2201.776 | 2204.429 | 2225.704 | 2256.272 | 2357.389 | 2208.473 | 2312.628 | 2314.555 | 2320.683 | 2361.841 | 2202.641 | 2211.672 | |
| worst | 2200 | 2315.502 | 2241.859 | 2298.356 | 2313.686 | 2395.748 | 2352.572 | 2328.8 | 2317.369 | 2339.95 | 2399.185 | 2341.226 | 2334.061 | |
| std | 4.36 × 10−6 | 63.34808 | 18.08569 | 32.13155 | 30.34504 | 17.75696 | 74.57407 | 7.057306 | 1.33189 | 8.678521 | 15.60657 | 64.84178 | 57.45861 | |
| median | 2200 | 2256.116 | 2206.485 | 2282.012 | 2285.503 | 2363.69 | 2293.16 | 2316.999 | 2316.157 | 2336.644 | 2380.674 | 2324.948 | 2223.844 | |
| rank | 1 | 4 | 2 | 5 | 6 | 12 | 7 | 10 | 9 | 11 | 13 | 8 | 3 | |
| C17-F22 | mean | 2293.452 | 2304.053 | 2309.64 | 2961.228 | 2300.478 | 2852.928 | 2310.94 | 2447.659 | 2303.451 | 2323.176 | 2300 | 2590.674 | 2315.89 |
| best | 2249.619 | 2302.865 | 2304.685 | 2736.917 | 2300.289 | 2325.93 | 2306.026 | 2303.655 | 2301.229 | 2317.806 | 2300 | 2301.37 | 2312.981 | |
| worst | 2309.573 | 2306.702 | 2311.968 | 3125.843 | 2300.639 | 4289.031 | 2315.364 | 2876.013 | 2308.429 | 2330.145 | 2300 | 3455.61 | 2322.759 | |
| std | 29.29682 | 1.78132 | 3.347251 | 163.7741 | 0.148633 | 958.3573 | 3.841076 | 285.5712 | 3.34564 | 5.128153 | 4.79 × 10−11 | 576.6258 | 4.631892 | |
| median | 2307.308 | 2303.322 | 2310.953 | 2991.077 | 2300.493 | 2398.375 | 2311.184 | 2305.484 | 2302.074 | 2322.376 | 2300 | 2302.858 | 2313.91 | |
| rank | 1 | 5 | 6 | 13 | 3 | 12 | 7 | 10 | 4 | 9 | 2 | 11 | 8 | |
| C17-F23 | mean | 2610.573 | 2629.183 | 2645.231 | 2708.158 | 2612.224 | 2726.841 | 2653.024 | 2616.866 | 2616.438 | 2639.373 | 2806.265 | 2640.991 | 2667.811 |
| best | 2607.664 | 2617.394 | 2632.674 | 2676.838 | 2606.93 | 2674.586 | 2628.832 | 2605.735 | 2605.898 | 2633.039 | 2736.331 | 2624.248 | 2659.715 | |
| worst | 2612.054 | 2640.741 | 2664.384 | 2751.868 | 2615.963 | 2799.207 | 2684.875 | 2626.638 | 2621.972 | 2644.202 | 2955.197 | 2656.69 | 2674.554 | |
| std | 1.994539 | 10.55426 | 14.9135 | 35.0647 | 4.480225 | 56.75694 | 23.83249 | 9.040098 | 7.270681 | 5.590693 | 102.8952 | 14.70599 | 7.17143 | |
| median | 2611.287 | 2629.299 | 2641.933 | 2701.962 | 2613.002 | 2716.785 | 2649.195 | 2617.545 | 2618.941 | 2640.125 | 2766.766 | 2641.513 | 2668.487 | |
| rank | 1 | 5 | 8 | 11 | 2 | 12 | 9 | 4 | 3 | 6 | 13 | 7 | 10 | |
| C17-F24 | mean | 2500 | 2628.429 | 2777.971 | 2866.473 | 2569.191 | 2809.687 | 2721.283 | 2747.647 | 2747.38 | 2702.715 | 2798.085 | 2766.089 | 2796.904 |
| best | 2500 | 2500.026 | 2749.551 | 2831.736 | 2500 | 2788.515 | 2539.368 | 2741.391 | 2733.965 | 2519.228 | 2667.104 | 2743.202 | 2777.411 | |
| worst | 2500 | 2756.728 | 2810.839 | 2925.445 | 2644.684 | 2842.916 | 2793.127 | 2760.786 | 2763.043 | 2765.55 | 2910.085 | 2813.42 | 2837.744 | |
| std | 0.000138 | 148.1166 | 27.63919 | 40.74193 | 59.26318 | 24.23185 | 121.6661 | 8.946334 | 13.17159 | 122.3327 | 99.80776 | 31.95768 | 28.33329 | |
| median | 2500 | 2628.481 | 2775.747 | 2854.356 | 2566.041 | 2803.659 | 2776.318 | 2744.206 | 2746.256 | 2763.041 | 2807.575 | 2753.866 | 2786.23 | |
| rank | 1 | 3 | 9 | 13 | 2 | 12 | 5 | 7 | 6 | 4 | 11 | 8 | 10 | |
| C17-F25 | mean | 2906.512 | 2922.277 | 2912.059 | 3302.497 | 2897.744 | 3106.26 | 2952.732 | 2944.896 | 2936.407 | 2928.564 | 2921.498 | 2929.4 | 2955.349 |
| best | 2899.622 | 2897.934 | 2899.173 | 3227.936 | 2897.743 | 2996.274 | 2950.071 | 2943.625 | 2913.914 | 2903.231 | 2899.585 | 2899.585 | 2949.724 | |
| worst | 2914.472 | 2946.585 | 2949.468 | 3386.778 | 2897.746 | 3238.662 | 2957.737 | 2946.057 | 2946.069 | 2950.815 | 2943.426 | 2950.481 | 2961.557 | |
| std | 7.989653 | 27.1567 | 24.94164 | 65.75238 | 0.001401 | 109.1914 | 3.436649 | 1.280875 | 15.0943 | 24.7158 | 25.30253 | 22.9263 | 4.8434 | |
| median | 2905.976 | 2922.294 | 2899.797 | 3297.637 | 2897.743 | 3095.053 | 2951.561 | 2944.951 | 2942.823 | 2930.105 | 2921.49 | 2933.766 | 2955.059 | |
| rank | 2 | 5 | 3 | 13 | 1 | 12 | 10 | 9 | 8 | 6 | 4 | 7 | 11 | |
| C17-F26 | mean | 2671.195 | 2913.423 | 2985.864 | 3820.788 | 2675.001 | 3616.499 | 3543.485 | 2894.319 | 3162.049 | 3024.196 | 3934.065 | 2953.575 | 2984.157 |
| best | 2617.932 | 2817.326 | 2800 | 3472.539 | 2600.001 | 3138.702 | 3155.692 | 2801.236 | 2817.027 | 2962.221 | 2800 | 2900 | 2918.692 | |
| worst | 2822.654 | 3035.347 | 3176.148 | 4183.224 | 2900 | 4076.951 | 3938.706 | 2975.736 | 3958.769 | 3149.034 | 4458.174 | 3043.137 | 3058.781 | |
| std | 100.9928 | 90.24848 | 214.6477 | 306.4302 | 149.9997 | 384.0996 | 344.4273 | 71.55693 | 534.9178 | 84.63646 | 768.3315 | 68.48644 | 71.71749 | |
| median | 2622.096 | 2900.509 | 2983.654 | 3813.695 | 2600.001 | 3625.172 | 3539.772 | 2900.152 | 2936.199 | 2992.764 | 4239.043 | 2935.581 | 2979.577 | |
| rank | 1 | 4 | 7 | 12 | 2 | 11 | 10 | 3 | 9 | 8 | 13 | 5 | 6 | |
| C17-F27 | mean | 3089.249 | 3108.049 | 3122.299 | 3241.788 | 3230.617 | 3156.931 | 3131.995 | 3128.978 | 3112.27 | 3107.927 | 3236.309 | 3104.619 | 3158.594 |
| best | 3088.978 | 3097.47 | 3095.743 | 3130.053 | 3089.518 | 3099.004 | 3100.639 | 3089.735 | 3094.181 | 3094.735 | 3223.231 | 3096.887 | 3110.429 | |
| worst | 3089.518 | 3119.426 | 3187.808 | 3448.33 | 3302.844 | 3201.841 | 3212.034 | 3245.764 | 3138.824 | 3143.478 | 3259.486 | 3115.015 | 3195.857 | |
| std | 0.310716 | 9.908994 | 43.79996 | 141.0072 | 97.5953 | 51.24289 | 53.52643 | 77.85813 | 20.82847 | 23.73436 | 16.13351 | 7.657847 | 36.95242 | |
| median | 3089.25 | 3107.651 | 3102.823 | 3194.385 | 3265.053 | 3163.44 | 3107.654 | 3090.206 | 3108.038 | 3096.747 | 3231.259 | 3103.287 | 3164.045 | |
| rank | 1 | 4 | 6 | 13 | 11 | 9 | 8 | 7 | 5 | 3 | 12 | 2 | 10 | |
| C17-F28 | mean | 3100 | 3206.371 | 3298.81 | 3829.484 | 3216.221 | 3436.214 | 3311.827 | 3335.937 | 3320.677 | 3445.166 | 3476.706 | 3368.271 | 3180.566 |
| best | 3100 | 3101.23 | 3172.905 | 3741.083 | 3100 | 3216.368 | 3185.855 | 3164.423 | 3227.504 | 3224.747 | 3462.464 | 3239.91 | 3150.246 | |
| worst | 3100 | 3383.883 | 3411.822 | 3893.295 | 3283.338 | 3554.863 | 3436.561 | 3411.825 | 3433.953 | 3731.813 | 3496.499 | 3446.48 | 3250.807 | |
| std | 7.13 × 10−5 | 125.1841 | 97.91492 | 70.64911 | 81.82053 | 153.671 | 130.6719 | 115.1056 | 103.9361 | 210.5104 | 15.77081 | 89.50779 | 47.68498 | |
| median | 3100 | 3170.186 | 3305.256 | 3841.779 | 3240.773 | 3486.812 | 3312.445 | 3383.749 | 3310.626 | 3412.052 | 3473.932 | 3393.348 | 3160.605 | |
| rank | 1 | 3 | 5 | 13 | 4 | 10 | 6 | 8 | 7 | 11 | 12 | 9 | 2 | |
| C17-F29 | mean | 3138.606 | 3179.875 | 3296.049 | 3393.557 | 3289.561 | 3381.154 | 3360.139 | 3232.25 | 3245.584 | 3197.841 | 3362.024 | 3221.345 | 3231.314 |
| best | 3131.359 | 3164.605 | 3216.476 | 3316.959 | 3206.422 | 3329.678 | 3226.82 | 3135.375 | 3159.205 | 3187.325 | 3241.182 | 3171.9 | 3222.514 | |
| worst | 3148.378 | 3205.527 | 3382.815 | 3465.973 | 3346.892 | 3413.532 | 3430.368 | 3320.002 | 3367.448 | 3209.226 | 3673.067 | 3259.484 | 3241.71 | |
| std | 7.707765 | 18.65754 | 85.63264 | 76.78127 | 60.23812 | 39.15099 | 91.66353 | 86.28562 | 90.14385 | 11.73545 | 208.2333 | 37.86476 | 8.061759 | |
| median | 3137.343 | 3174.685 | 3292.453 | 3395.648 | 3302.466 | 3390.704 | 3391.683 | 3236.811 | 3227.843 | 3197.407 | 3266.924 | 3226.999 | 3230.516 | |
| rank | 1 | 2 | 9 | 13 | 8 | 12 | 10 | 6 | 7 | 3 | 11 | 4 | 5 | |
| C17-F30 | mean | 3396.648 | 7103.166 | 315,325.2 | 3,935,476 | 3593.41 | 228,769.3 | 1854,829 | 18,378.17 | 25,404.81 | 328,679.2 | 837,788.8 | 434,361.7 | 2254,186 |
| best | 3395.218 | 4030.14 | 111,836.1 | 885,863.3 | 3485.918 | 9138.959 | 207,480.4 | 6468.614 | 10,065.88 | 44,946.47 | 644,043.4 | 5474.912 | 282,133.6 | |
| worst | 3397.324 | 15,735.06 | 821,835.5 | 6,216,163 | 3634.301 | 458,333.2 | 5,681,033 | 35,678.41 | 34,710.86 | 821,511 | 1069,950 | 1,705,095 | 4,266,383 | |
| std | 0.972309 | 5757.626 | 338,593.4 | 2,231,806 | 71.81478 | 185,592.7 | 2,567,825 | 12,749.49 | 11,597.43 | 352,907.1 | 176,988.7 | 847,168.3 | 1,783,824 | |
| median | 3397.024 | 4323.731 | 163,814.6 | 4,319,938 | 3626.71 | 223,802.5 | 765,402.1 | 15,682.84 | 28,421.26 | 224,129.6 | 818,581 | 13,438.71 | 2,234,113 | |
| rank | 1 | 3 | 7 | 13 | 2 | 6 | 11 | 4 | 5 | 8 | 10 | 9 | 12 | |
| Sum rank | 46 | 106 | 215 | 356 | 87 | 303 | 272 | 160 | 182 | 218 | 265 | 206 | 223 | |
| Mean rank | 1.586207 | 3.655172 | 7.413793 | 12.27586 | 3 | 10.44828 | 9.37931 | 5.517241 | 6.275862 | 7.517241 | 9.137931 | 7.103448 | 7.689655 | |
| Total rank | 1 | 3 | 7 | 13 | 2 | 12 | 11 | 4 | 5 | 8 | 10 | 6 | 9 | |
| SOA | WSO | AVOA | RSA | MPA | TSA | WOA | MVO | GWO | TLBO | GSA | PSO | GA | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C17-F1 | mean | 1575.134 | 8.63 × 109 | 3318.344 | 4.38 × 1010 | 44,342.91 | 2.31 × 1010 | 2.19 × 109 | 660,553.8 | 2.3 × 109 | 6.17 × 109 | 11,193,471 | 2 × 109 | 1.32 × 108 |
| best | 291.5791 | 3.2 × 109 | 301.9834 | 3.91 × 1010 | 23,422.06 | 1.8 × 1010 | 1.14 × 109 | 489,540.5 | 1.48 × 109 | 5.57 × 109 | 2775.087 | 5373.926 | 84,091,185 | |
| worst | 2723.003 | 1.55 × 1010 | 8149.68 | 5.39 × 1010 | 73,308.85 | 2.69 × 1010 | 4.06 × 109 | 1,043,985 | 3.25 × 109 | 7.22 × 109 | 39,077,336 | 6.32 × 109 | 2.15 × 108 | |
| std | 1312.344 | 5.69 × 109 | 3675.955 | 6.83 × 109 | 23,716.31 | 3.78 × 109 | 1.36 × 109 | 257,939.3 | 7.37 × 108 | 7.68 × 108 | 18,781,636 | 2.98 × 109 | 57,126,045 | |
| median | 1642.976 | 7.91 × 109 | 2410.857 | 4.11 × 1010 | 40,320.37 | 2.38 × 1010 | 1.77 × 109 | 554,344.8 | 2.24 × 109 | 5.95 × 109 | 2,846,886 | 8.4 × 108 | 1.15 × 108 | |
| rank | 1 | 11 | 2 | 13 | 3 | 12 | 8 | 4 | 9 | 10 | 5 | 7 | 6 | |
| C17-F3 | mean | 781.8758 | 42,375.1 | 47,609.78 | 78,405.91 | 834.2454 | 48,537.76 | 225,225.5 | 1031.676 | 55,393.14 | 36,906.86 | 102,114.9 | 77,694.12 | 134,031.2 |
| best | 470.0985 | 31,992.7 | 25,840.42 | 60,713.72 | 466.3567 | 36,205.28 | 165,937.7 | 751.8445 | 42,537.2 | 28,114.76 | 87,911.84 | 5616.74 | 91,331.46 | |
| worst | 1159.523 | 56,799.39 | 61,573.93 | 85,173.33 | 1251.796 | 60,139.23 | 339,833.4 | 1377.855 | 69,178.02 | 44,671.67 | 112,455.1 | 122,259.2 | 171,056.6 | |
| std | 363.8149 | 11,011.05 | 15,321.68 | 11,832.89 | 426.2832 | 11,184.08 | 79,056.19 | 259.0859 | 14,094.56 | 8186.672 | 11,070.13 | 52,140.19 | 33,150.42 | |
| median | 748.9407 | 40,354.16 | 51,512.39 | 83,868.3 | 809.4147 | 48,903.27 | 197,565.4 | 998.5019 | 54,928.67 | 37,420.51 | 104,046.4 | 91,450.26 | 136,868.4 | |
| rank | 1 | 5 | 6 | 10 | 2 | 7 | 13 | 3 | 8 | 4 | 11 | 9 | 12 | |
| C17-F4 | mean | 481.8263 | 841.7389 | 518.3661 | 10,440.38 | 495.7528 | 2158.726 | 841.9903 | 495.544 | 567.0971 | 827.2028 | 603.7402 | 504.0106 | 813.8432 |
| best | 469.5735 | 740.4671 | 494.0059 | 6680.906 | 482.257 | 1388.877 | 664.6617 | 488.5097 | 532.196 | 630.1235 | 582.046 | 478.9838 | 724.672 | |
| worst | 496.1271 | 1012.754 | 537.7292 | 14,606.03 | 517.0849 | 2948.487 | 1220.665 | 504.9644 | 623.5882 | 1298.773 | 628.6736 | 536.8896 | 894.6409 | |
| std | 12.21788 | 127.7259 | 18.14231 | 3289.65 | 15.86538 | 664.9026 | 255.0823 | 7.418566 | 39.35261 | 316.7743 | 20.33317 | 24.07526 | 71.3288 | |
| median | 480.8022 | 806.8675 | 520.8646 | 10237.29 | 491.8346 | 2148.769 | 741.317 | 494.3509 | 556.3021 | 689.9572 | 602.1205 | 500.0845 | 818.03 | |
| rank | 1 | 10 | 5 | 13 | 3 | 12 | 11 | 2 | 6 | 9 | 7 | 4 | 8 | |
| C17-F5 | mean | 591.9605 | 653.5151 | 740.563 | 909.9791 | 604.5444 | 853.4376 | 764.4085 | 616.2858 | 623.7568 | 746.731 | 737.7933 | 685.3203 | 706.2255 |
| best | 572.8715 | 603.0483 | 700.9927 | 881.9704 | 597.5869 | 831.9647 | 737.6831 | 577.9794 | 610.044 | 696.6675 | 716.8998 | 620.4016 | 695.0019 | |
| worst | 609.7335 | 691.464 | 803.4606 | 946.4631 | 612.4978 | 888.9031 | 787.6346 | 671.5395 | 645.0115 | 779.7375 | 765.6516 | 768.6397 | 714.7736 | |
| std | 17.43398 | 39.32124 | 46.32888 | 30.80919 | 6.734852 | 24.70772 | 24.55298 | 39.50365 | 15.98556 | 36.95873 | 21.72216 | 61.70543 | 9.752587 | |
| median | 592.6185 | 659.7741 | 728.8994 | 905.7414 | 604.0464 | 846.4413 | 766.1582 | 607.8121 | 619.9859 | 755.2595 | 734.3109 | 676.12 | 707.5632 | |
| rank | 1 | 5 | 9 | 13 | 2 | 12 | 11 | 3 | 4 | 10 | 8 | 6 | 7 | |
| C17-F6 | mean | 606.6229 | 644.2901 | 649.6843 | 688.3251 | 603.2172 | 667.3338 | 677.7711 | 623.4261 | 610.7615 | 641.7919 | 660.113 | 650.2099 | 640.5046 |
| best | 605.5854 | 639.7766 | 647.5717 | 682.6749 | 601.8096 | 648.0678 | 656.5877 | 605.7405 | 604.005 | 636.0484 | 659.3197 | 643.6113 | 632.6248 | |
| worst | 608.634 | 653.2473 | 652.9881 | 695.4187 | 605.8092 | 682.7658 | 699.2122 | 638.1243 | 616.1276 | 646.9417 | 661.167 | 664.0501 | 649.3386 | |
| std | 1.435549 | 6.086035 | 2.340959 | 5.885883 | 1.859946 | 16.20593 | 17.91275 | 14.59694 | 5.139016 | 4.469085 | 0.814301 | 9.348912 | 7.046186 | |
| median | 606.1361 | 642.0682 | 649.0887 | 687.6034 | 602.6249 | 669.2509 | 677.6422 | 624.9199 | 611.4567 | 642.0888 | 659.9828 | 646.5891 | 640.0274 | |
| rank | 2 | 7 | 8 | 13 | 1 | 11 | 12 | 4 | 3 | 6 | 10 | 9 | 5 | |
| C17-F7 | mean | 824.4019 | 1028.891 | 1173.837 | 1378.659 | 871.1627 | 1261.634 | 1237.611 | 877.7531 | 902.3727 | 1050.815 | 987.1371 | 961.4578 | 998.7671 |
| best | 808.2562 | 937.0001 | 1050.146 | 1364.064 | 830.9612 | 1217.349 | 1191.509 | 830.7576 | 869.2935 | 1023.079 | 936.652 | 940.4088 | 990.4792 | |
| worst | 840.1661 | 1166.637 | 1346.571 | 1403.463 | 963.2763 | 1286.653 | 1300.094 | 923.0444 | 952.51 | 1093.22 | 1062.44 | 991.3926 | 1006.751 | |
| std | 15.87142 | 97.43161 | 130.9887 | 17.50672 | 62.07233 | 30.40281 | 53.17939 | 38.72923 | 40.18853 | 33.72067 | 55.15938 | 24.88631 | 6.666849 | |
| median | 824.5927 | 1005.964 | 1149.315 | 1373.554 | 845.2067 | 1271.267 | 1229.42 | 878.6053 | 893.8436 | 1043.48 | 974.7284 | 957.015 | 998.9192 | |
| rank | 1 | 8 | 10 | 13 | 2 | 12 | 11 | 3 | 4 | 9 | 6 | 5 | 7 | |
| C17-F8 | mean | 876.44 | 921.3526 | 959.7397 | 1143.549 | 905.3425 | 1109.568 | 1022.72 | 918.4966 | 931.9204 | 1052.634 | 972.3755 | 928.3456 | 1000.158 |
| best | 861.6931 | 896.2341 | 927.3542 | 1121.49 | 882.7297 | 1050.063 | 974.1633 | 894.9188 | 904.3727 | 1014.92 | 946.2582 | 899.4956 | 989.1129 | |
| worst | 901.5509 | 949.9888 | 983.0733 | 1172.767 | 930.5994 | 1173.263 | 1072.325 | 929.7411 | 960.3594 | 1079.362 | 1000.98 | 953.2309 | 1019.463 | |
| std | 18.96082 | 22.04258 | 25.26299 | 25.97783 | 22.14314 | 51.04285 | 42.15311 | 16.41749 | 25.40171 | 27.15429 | 24.10391 | 23.49774 | 13.27682 | |
| median | 871.258 | 919.5937 | 964.2657 | 1139.97 | 904.0204 | 1107.473 | 1022.196 | 924.6632 | 931.4748 | 1058.127 | 971.1318 | 930.3279 | 996.027 | |
| rank | 1 | 4 | 7 | 13 | 2 | 12 | 10 | 3 | 6 | 11 | 8 | 5 | 9 | |
| C17-F9 | mean | 1195.591 | 6940.902 | 5082.067 | 11,265.22 | 1229.29 | 14,700.33 | 12,240.59 | 3886.39 | 2149.413 | 4773.832 | 4288.668 | 4170.381 | 1390.886 |
| best | 1005.433 | 5371.93 | 3739.922 | 10,986.11 | 1039.082 | 12,687.95 | 8790.439 | 2585.385 | 1625.875 | 4462.957 | 3715.719 | 1685.736 | 1257.047 | |
| worst | 1413.609 | 9175.404 | 5799.199 | 11,406.53 | 1446.192 | 17,328.07 | 16,223.67 | 6664.175 | 2800.198 | 5128.325 | 5171.329 | 6392.186 | 1505.439 | |
| std | 174.8498 | 1601.414 | 921.6272 | 189.314 | 172.3628 | 2274.191 | 3233.82 | 1919.637 | 510.5671 | 310.8324 | 641.2085 | 1950.664 | 125.7143 | |
| median | 1181.661 | 6608.138 | 5394.574 | 11,334.13 | 1215.943 | 14,392.65 | 11,974.14 | 3148 | 2085.789 | 4752.023 | 4133.811 | 4301.802 | 1400.529 | |
| rank | 1 | 10 | 9 | 11 | 2 | 13 | 12 | 5 | 4 | 8 | 7 | 6 | 3 | |
| C17-F10 | mean | 3816.318 | 5075.775 | 5669.471 | 8287.882 | 4220.886 | 7602.726 | 6780.741 | 5112.877 | 4492.313 | 8516.982 | 5023.915 | 5002.451 | 6061.83 |
| best | 3461.682 | 4293.963 | 4863.102 | 7401.561 | 3924.042 | 6749.686 | 6256.547 | 4322.227 | 3596.22 | 8229.134 | 4753.717 | 4206.05 | 5451.612 | |
| worst | 4025.525 | 6408.048 | 6213.965 | 8953.203 | 4725.856 | 8093.557 | 7076.522 | 6028.47 | 5426.175 | 8698.705 | 5457.712 | 5740.762 | 6971.01 | |
| std | 268.2071 | 933.6489 | 647.4401 | 649.1055 | 362.4291 | 596.9208 | 382.085 | 785.8896 | 962.8636 | 207.2443 | 323.6773 | 627.4781 | 645.3234 | |
| median | 3889.033 | 4800.545 | 5800.408 | 8398.382 | 4116.823 | 7783.83 | 6894.948 | 5050.406 | 4473.429 | 8570.044 | 4942.116 | 5031.496 | 5912.35 | |
| rank | 1 | 6 | 8 | 12 | 2 | 11 | 10 | 7 | 3 | 13 | 5 | 4 | 9 | |
| C17-F11 | mean | 1162.133 | 1448.116 | 1268.696 | 9328.214 | 1171.813 | 5380.791 | 6344.694 | 1341.146 | 1947.539 | 1897.276 | 3021.119 | 1401.099 | 5138.217 |
| best | 1142.585 | 1297.005 | 1196.704 | 7579.907 | 1132.01 | 3668.83 | 4242.53 | 1265.451 | 1440.926 | 1744.854 | 2320.74 | 1164.748 | 1545.325 | |
| worst | 1182.493 | 1551.242 | 1337.29 | 10,508.06 | 1215.997 | 6958.553 | 9436.31 | 1429.885 | 2921.548 | 2074.605 | 3738.218 | 1770.983 | 9100.655 | |
| std | 18.852 | 121.068 | 58.60946 | 1341.609 | 41.78269 | 1638.069 | 2277.368 | 82.79307 | 687.1649 | 140.7209 | 668.1668 | 268.493 | 3518.582 | |
| median | 1161.728 | 1472.108 | 1270.394 | 9612.443 | 1169.622 | 5447.89 | 5849.969 | 1334.624 | 1713.841 | 1884.822 | 3012.758 | 1334.332 | 4953.445 | |
| rank | 1 | 6 | 3 | 13 | 2 | 11 | 12 | 4 | 8 | 7 | 9 | 5 | 10 | |
| C17-F12 | mean | 90,577.25 | 85,200,129 | 22,294,766 | 1.17 × 1010 | 90,003.89 | 4.13 × 109 | 1.9 × 108 | 16,023,229 | 30,541,462 | 3.65 × 108 | 2.13 × 108 | 436,028.7 | 7,615,346 |
| best | 53,334.11 | 6,278,481 | 3,137,139 | 1.04 × 1010 | 53,008.9 | 8.42 × 108 | 54,166,306 | 1969,767 | 2402,615 | 2.99 × 108 | 41,143,265 | 236,773 | 5,611,464 | |
| worst | 186,847.7 | 1.92 × 108 | 54,450,458 | 1.47 × 1010 | 185,636.8 | 9.43 × 109 | 3.02 × 108 | 27,669,712 | 90,151,780 | 4.98 × 108 | 6.8 × 108 | 912,580.8 | 9,655,726 | |
| std | 64,578.16 | 77,647,077 | 22,587,307 | 2.04 × 109 | 64,148.09 | 3.69 × 109 | 1.08 × 108 | 10,686,736 | 40,183,994 | 90,619,476 | 3.12 × 108 | 320,014.9 | 1,658,891 | |
| median | 61,063.6 | 71,256,869 | 15,795,734 | 1.08 × 1010 | 60,684.91 | 3.12 × 109 | 2.03 × 108 | 17,226,719 | 14,805,726 | 3.3 × 108 | 65,228,755 | 297,380.4 | 7,597,098 | |
| rank | 2 | 8 | 6 | 13 | 1 | 12 | 9 | 5 | 7 | 11 | 10 | 3 | 4 | |
| C17-F13 | mean | 1698.702 | 42,943.25 | 159,812.1 | 1.13 × 1010 | 1687.016 | 3.08 × 109 | 1880,155 | 115,014 | 806,958.5 | 50,671,827 | 38,902.02 | 19,073,995 | 8,631,128 |
| best | 1666.692 | 15,453.39 | 88,435.66 | 5.92 × 109 | 1655.899 | 3.01 × 108 | 874,962.7 | 43,649.1 | 90,835.15 | 24,346,775 | 31,538.43 | 10,348.01 | 5,437,187 | |
| worst | 1739.004 | 69,114.37 | 252,818.6 | 1.38 × 1010 | 1727.879 | 4.75 × 109 | 3,971,612 | 152,301.5 | 2,153,200 | 79,648,604 | 56,967.6 | 71,682,069 | 11,994,455 | |
| std | 30.25763 | 29,451.87 | 68,264.23 | 3.62 × 109 | 30.04096 | 1.98 × 109 | 1,425,344 | 48,532.06 | 945,863.6 | 22,741,505 | 12,177.81 | 35,135,804 | 2,736,987 | |
| median | 1694.557 | 43,602.61 | 148,997.1 | 1.27 × 1010 | 1682.144 | 3.64 × 109 | 1,337,022 | 132,052.8 | 491,899.7 | 49,345,965 | 33,551.03 | 2,301,781 | 8,546,436 | |
| rank | 2 | 4 | 6 | 13 | 1 | 12 | 8 | 5 | 7 | 11 | 3 | 10 | 9 | |
| C17-F14 | mean | 1444.401 | 1676.266 | 289,413.4 | 2,344,304 | 1496.974 | 605,895.5 | 4,052,315 | 31,475.33 | 80,820.24 | 125,817.1 | 1220,811 | 40,538.98 | 1389,524 |
| best | 1432.619 | 1509.528 | 40,389.43 | 1,178,223 | 1482.994 | 19,646.14 | 500,090.9 | 1774.484 | 3031.162 | 56,550.37 | 792,133.3 | 5098.106 | 79,752 | |
| worst | 1454.965 | 1968.988 | 670,169.8 | 3,490,954 | 1528.7 | 2,259,238 | 10,915,286 | 81,318.86 | 304,629.3 | 166,885.1 | 1843,312 | 113,632 | 2,018,125 | |
| std | 9.363157 | 205.8048 | 277,873.9 | 1,112,536 | 21.28861 | 1,102,518 | 4,662,123 | 34,996.97 | 149,234.9 | 51,967.8 | 494,689.9 | 49,872.43 | 884,978.4 | |
| median | 1445.009 | 1613.274 | 223,547.2 | 2,354,020 | 1488.101 | 72,349.17 | 2,396,942 | 21,403.99 | 7810.246 | 139,916.5 | 1,123,899 | 21,712.91 | 1,730,110 | |
| rank | 1 | 3 | 8 | 12 | 2 | 9 | 13 | 4 | 6 | 7 | 10 | 5 | 11 | |
| C17-F15 | mean | 1607.963 | 4778.296 | 39,852.03 | 6.38 × 108 | 1689.005 | 11,487,233 | 2179,861 | 42,062.9 | 55,302.7 | 6330,079 | 17,042.7 | 22,342.61 | 1,660,817 |
| best | 1597.136 | 2049.811 | 11,559.75 | 5.5 × 108 | 1662.636 | 510,798.9 | 41,148.44 | 27,984.36 | 29,781.28 | 1782,675 | 12,076.24 | 9161.007 | 162,991.5 | |
| worst | 1620.23 | 7380.576 | 64,784.18 | 7.04 × 108 | 1713.512 | 30,936,722 | 6697,059 | 53,948.33 | 95,876.74 | 10,145,977 | 23,149.44 | 43,566.9 | 2,552,150 | |
| std | 11.79297 | 2216.528 | 22,477.62 | 75,373,693 | 26.43209 | 14,324,358 | 3053,330 | 10,716.84 | 28,402.06 | 3805,854 | 4629.296 | 16,392.76 | 1,046,225 | |
| median | 1607.243 | 4841.398 | 41532.1 | 6.48 × 108 | 1689.935 | 7,250,705 | 990,617.7 | 43,159.45 | 47,776.39 | 6,695,832 | 16,472.57 | 18,321.27 | 1,964,064 | |
| rank | 1 | 3 | 6 | 13 | 2 | 12 | 10 | 7 | 8 | 11 | 4 | 5 | 9 | |
| C17-F16 | mean | 1938.024 | 2652.321 | 3090.893 | 5197.758 | 2043.515 | 3941.647 | 3856.78 | 2718.081 | 2844.053 | 3652.155 | 3800.762 | 2579.706 | 2881.999 |
| best | 1875.092 | 2467.942 | 2618.661 | 4355.175 | 1960.684 | 2696.154 | 3503.463 | 2471.407 | 2350.898 | 2855.694 | 3606.06 | 2182.495 | 2536.668 | |
| worst | 2022.866 | 2873.364 | 3646.496 | 5943.335 | 2140.407 | 5949.276 | 4712.045 | 3124.71 | 3696.224 | 4147.742 | 3977.124 | 3007.692 | 3235.006 | |
| std | 63.16545 | 180.599 | 422.6948 | 848.5357 | 76.10694 | 1411.044 | 573.5086 | 297.6959 | 587.7307 | 555.942 | 165.3951 | 348.332 | 306.3028 | |
| median | 1927.069 | 2633.988 | 3049.207 | 5246.261 | 2036.484 | 3560.579 | 3605.805 | 2638.104 | 2664.545 | 3802.591 | 3809.932 | 2564.319 | 2878.16 | |
| rank | 1 | 4 | 8 | 13 | 2 | 12 | 11 | 5 | 6 | 9 | 10 | 3 | 7 | |
| C17-F17 | mean | 1852.902 | 2208.309 | 2527.865 | 3850.265 | 1842.558 | 3293.211 | 2983.695 | 2140.944 | 2036.312 | 2268.715 | 2581.32 | 2297.254 | 2189.114 |
| best | 1788.722 | 2004.347 | 2371.871 | 3442.105 | 1779.719 | 2060.002 | 2607.115 | 2039.798 | 1924.983 | 2092.269 | 2474.207 | 2111.585 | 2010.935 | |
| worst | 1928.103 | 2579.523 | 2652.707 | 4571.363 | 1922.001 | 5754.239 | 3280.496 | 2263.674 | 2223.179 | 2603.348 | 2743.277 | 2433.751 | 2310.59 | |
| std | 71.09131 | 262.7278 | 122.841 | 511.0619 | 71.75205 | 1677.199 | 286.4468 | 106.3038 | 138.6211 | 232.8375 | 131.3936 | 136.9696 | 131.9916 | |
| median | 1847.391 | 2124.683 | 2543.44 | 3693.796 | 1834.256 | 2679.302 | 3023.584 | 2130.153 | 1998.542 | 2189.622 | 2553.898 | 2321.84 | 2217.466 | |
| rank | 2 | 6 | 9 | 13 | 1 | 12 | 11 | 4 | 3 | 7 | 10 | 8 | 5 | |
| C17-F18 | mean | 1938.93 | 73,105.14 | 2,825,586 | 34,857,872 | 1925.262 | 1277,923 | 12,144,452 | 500,241.1 | 1900,915 | 1,703,500 | 549,137.3 | 690,457.8 | 4,288,985 |
| best | 1893.579 | 35,316.23 | 300,783.8 | 11,269,502 | 1876.939 | 562,332.5 | 5149,402 | 138,664.6 | 227,445.9 | 539,938.8 | 307,806.8 | 65,741.96 | 1,298,945 | |
| worst | 2006.212 | 126,012.8 | 5,637,821 | 68,482,148 | 1993.891 | 1,910,634 | 31,414,794 | 794,063.9 | 3,767,376 | 2,823,794 | 1,069,302 | 1,843,343 | 7,761,510 | |
| std | 55.16086 | 43,259.8 | 2,501,283 | 24,260,902 | 55.11681 | 631,242.3 | 12,853,387 | 306,007.1 | 1,464,392 | 954,837.7 | 351,297.8 | 816,443.5 | 2,854,320 | |
| median | 1927.964 | 65,545.78 | 2,681,870 | 29,839,919 | 1915.11 | 1,319,364 | 6,006,807 | 534,118 | 1,804,419 | 1,725,134 | 409,720.2 | 426,373.2 | 4,047,743 | |
| rank | 2 | 3 | 10 | 13 | 1 | 7 | 12 | 4 | 9 | 8 | 5 | 6 | 11 | |
| C17-F19 | mean | 1950.448 | 7634.682 | 72,080.61 | 1.04 × 109 | 1934.536 | 46,099,123 | 16,697,045 | 566,616.3 | 776,641.6 | 6,505,032 | 87,089.66 | 155,575 | 1,002,429 |
| best | 1944.048 | 4603.741 | 15,265.2 | 7.54 × 108 | 1925.933 | 1968,442 | 1190,037 | 237,497.3 | 45,758.44 | 5,013,834 | 47,176.61 | 2541.803 | 178,602.2 | |
| worst | 1956.475 | 9305.339 | 160,723 | 1.58 × 109 | 1940.446 | 1.4 × 108 | 42,887,049 | 962,525.9 | 2,874,146 | 8,511,539 | 117,244.7 | 526,626 | 2,377,684 | |
| std | 6.70424 | 2126.603 | 63,361.95 | 3.68 × 108 | 6.19493 | 64,769,055 | 18,312,639 | 316,644.1 | 1,398,964 | 1,468,164 | 29,169.63 | 249,691.1 | 964,832.8 | |
| median | 1950.635 | 8314.824 | 56,167.14 | 9.2 × 108 | 1935.883 | 21,268,185 | 11,355,547 | 533,220.9 | 93,330.9 | 6,247,378 | 91,968.68 | 46,566.05 | 726,714.7 | |
| rank | 2 | 3 | 4 | 13 | 1 | 12 | 11 | 7 | 8 | 10 | 5 | 6 | 9 | |
| C17-F20 | mean | 2189.442 | 2360.68 | 2678.297 | 3018.944 | 2202.08 | 2907.819 | 2744.225 | 2463.574 | 2502.458 | 2699.637 | 3079.815 | 2833.366 | 2438.403 |
| best | 2134.196 | 2288.632 | 2510.461 | 2829.558 | 2121.756 | 2570.504 | 2403.758 | 2140.461 | 2283.051 | 2586.227 | 2680.886 | 2259.638 | 2241.364 | |
| worst | 2259.836 | 2498.568 | 2933.844 | 3140.294 | 2261.922 | 3136.657 | 2907.139 | 2802.38 | 2617.604 | 2888.94 | 3587.357 | 3572.419 | 2528.431 | |
| std | 57.14654 | 94.38145 | 186.4711 | 133.7757 | 60.93235 | 261.575 | 235.0817 | 303.3727 | 149.2588 | 136.6338 | 379.9235 | 552.2857 | 132.8408 | |
| median | 2181.868 | 2327.759 | 2634.442 | 3052.963 | 2212.321 | 2962.058 | 2833.001 | 2455.727 | 2554.588 | 2661.69 | 3025.509 | 2750.703 | 2491.908 | |
| rank | 1 | 3 | 7 | 12 | 2 | 11 | 9 | 5 | 6 | 8 | 13 | 10 | 4 | |
| C17-F21 | mean | 2334.267 | 2451.525 | 2451.182 | 2708.062 | 2372.321 | 2623.763 | 2600.99 | 2418.065 | 2435.549 | 2544.532 | 2590.171 | 2440.405 | 2497.362 |
| best | 2229.608 | 2427.241 | 2210.563 | 2624.032 | 2364.018 | 2578.473 | 2539.261 | 2385.897 | 2403.354 | 2514.163 | 2570.64 | 2423.64 | 2490.605 | |
| worst | 2384.456 | 2472.696 | 2619.705 | 2807.897 | 2387.931 | 2707.121 | 2653.493 | 2460.016 | 2517.673 | 2556.921 | 2628.386 | 2466.822 | 2506.684 | |
| std | 70.60764 | 20.94728 | 172.4367 | 79.98545 | 10.64284 | 58.08507 | 49.47883 | 31.62808 | 55.05508 | 20.48386 | 25.92502 | 19.61484 | 6.981597 | |
| median | 2361.502 | 2453.082 | 2487.23 | 2700.16 | 2368.668 | 2604.729 | 2605.603 | 2413.174 | 2410.585 | 2553.522 | 2580.83 | 2435.579 | 2496.079 | |
| rank | 1 | 7 | 6 | 13 | 2 | 12 | 11 | 3 | 4 | 9 | 10 | 5 | 8 | |
| C17-F22 | mean | 2332.529 | 3959.433 | 6059.49 | 8152.075 | 2330.163 | 7394.703 | 7190.862 | 6119.96 | 4511.888 | 8205.841 | 6631.627 | 4407.861 | 2804 |
| best | 2302.568 | 2653.991 | 2403.992 | 7043.939 | 2303.498 | 4181.538 | 3233.91 | 4962.584 | 2908.358 | 3396.988 | 4129.775 | 2417.459 | 2740.193 | |
| worst | 2373.482 | 5235.829 | 7475.833 | 9265.812 | 2405.022 | 9991.897 | 9030.261 | 7463.774 | 6446.611 | 10,454 | 7731.139 | 7039.898 | 2875.878 | |
| std | 35.41728 | 1461.304 | 2441.084 | 954.9404 | 49.93237 | 2954.165 | 2683.669 | 1031.328 | 1696.022 | 3239.01 | 1678.839 | 2265.566 | 62.5268 | |
| median | 2327.034 | 3973.957 | 7179.067 | 8149.275 | 2306.067 | 7702.689 | 8249.638 | 6026.741 | 4346.291 | 9486.189 | 7332.796 | 4087.044 | 2799.965 | |
| rank | 2 | 4 | 7 | 12 | 1 | 11 | 10 | 8 | 6 | 13 | 9 | 5 | 3 | |
| C17-F23 | mean | 2691.435 | 3077.843 | 2949.293 | 3294.999 | 2826.529 | 3,,206.505 | 3089.699 | 2776.37 | 2843.433 | 2903.634 | 3858.628 | 2957.034 | 2950.425 |
| best | 2679.378 | 2941.813 | 2831.233 | 3236.012 | 2780.905 | 3073.12 | 3021.808 | 2743.748 | 2731.346 | 2892.146 | 3741.567 | 2853.239 | 2899.501 | |
| worst | 2704.098 | 3173.198 | 3136.276 | 3380.292 | 2889.29 | 3316.166 | 3188.281 | 2813.701 | 2939.296 | 2918.309 | 3974.499 | 3093.225 | 3010.503 | |
| std | 10.10131 | 100.1635 | 133.6444 | 62.73727 | 46.7791 | 101.8644 | 72.42882 | 36.38104 | 100.4405 | 11.04206 | 123.4437 | 101.7865 | 45.64687 | |
| median | 2691.131 | 3098.181 | 2914.831 | 3281.845 | 2817.96 | 3218.368 | 3074.354 | 2774.014 | 2851.546 | 2902.041 | 3859.223 | 2940.837 | 2945.848 | |
| rank | 1 | 9 | 6 | 12 | 3 | 11 | 10 | 2 | 4 | 5 | 13 | 8 | 7 | |
| C17-F24 | mean | 2896.226 | 3408.484 | 3199.101 | 3463.698 | 2877.119 | 3391.269 | 3316.346 | 2915.695 | 2958.944 | 3090.075 | 3408.418 | 3091.683 | 3257.36 |
| best | 2888.001 | 3305.505 | 3048.832 | 3366.821 | 2870.935 | 3343.024 | 3234.967 | 2877.571 | 2894.125 | 3059.462 | 3368.189 | 3016.899 | 3199.87 | |
| worst | 2902.589 | 3537.417 | 3367.271 | 3632.006 | 2884.633 | 3440.512 | 3459.107 | 2948.554 | 3049.884 | 3125.528 | 3449.345 | 3136.157 | 3339.026 | |
| std | 6.731113 | 96.59341 | 139.9192 | 122.5211 | 5.839244 | 51.92828 | 98.12749 | 34.76358 | 65.36341 | 29.5475 | 35.88437 | 54.9917 | 59.44844 | |
| median | 2897.156 | 3395.506 | 3190.151 | 3427.983 | 2876.453 | 3390.77 | 3285.656 | 2918.328 | 2945.884 | 3087.655 | 3408.07 | 3106.838 | 3245.273 | |
| rank | 2 | 12 | 7 | 13 | 1 | 10 | 9 | 3 | 4 | 5 | 11 | 6 | 8 | |
| C17-F25 | mean | 2912.942 | 3083.84 | 2910.493 | 4702.903 | 2906.992 | 3544.987 | 3087.454 | 2893.786 | 2978.111 | 3041.552 | 3004.331 | 2912.146 | 3085.075 |
| best | 2909.21 | 3059.773 | 2895.096 | 4048.889 | 2890.234 | 3041.758 | 3014.644 | 2883.757 | 2932.571 | 2966.697 | 2991.811 | 2888.122 | 3052.956 | |
| worst | 2917.091 | 3116.934 | 2952.85 | 5574.617 | 2948.672 | 4212.467 | 3186.74 | 2913.858 | 3018.136 | 3093.076 | 3017.914 | 2942.563 | 3105.734 | |
| std | 3.759012 | 26.82682 | 28.25826 | 635.4398 | 27.9838 | 489.9687 | 74.05925 | 13.61994 | 37.24705 | 55.78418 | 10.77907 | 27.8468 | 23.07507 | |
| median | 2912.734 | 3079.325 | 2897.013 | 4594.053 | 2894.53 | 3462.861 | 3074.216 | 2888.764 | 2980.868 | 3053.217 | 3003.8 | 2908.95 | 3090.805 | |
| rank | 5 | 9 | 3 | 13 | 2 | 12 | 11 | 1 | 6 | 8 | 7 | 4 | 10 | |
| C17-F26 | mean | 2893.811 | 7030.026 | 7628.776 | 10,262.03 | 2900.274 | 7838.24 | 8165.049 | 4768.338 | 4910.815 | 5876.503 | 7785.852 | 4194.966 | 4581.948 |
| best | 2807.968 | 5403.73 | 6234.854 | 9352.232 | 2900.076 | 6226.954 | 7340.114 | 4402.959 | 4478.258 | 3765.572 | 6650.013 | 2819.941 | 4133.612 | |
| worst | 2927.204 | 8050.923 | 8445.905 | 11,868.69 | 2900.493 | 9673.83 | 8975.654 | 5108.717 | 5422.342 | 7143.24 | 8377.255 | 6371.495 | 4920.061 | |
| std | 57.33427 | 1138.534 | 973.1733 | 1181.029 | 0.207894 | 1474.61 | 738.9123 | 347.4211 | 482.6334 | 1477.575 | 805.9973 | 1521.981 | 346.2337 | |
| median | 2920.037 | 7332.725 | 7917.173 | 9913.604 | 2900.263 | 7726.088 | 8172.214 | 4780.839 | 4871.329 | 6298.6 | 8058.069 | 3794.215 | 4637.06 | |
| rank | 1 | 8 | 9 | 13 | 2 | 11 | 12 | 5 | 6 | 7 | 10 | 3 | 4 | |
| C17-F27 | mean | 3215.3 | 3427.03 | 3367.647 | 3811.95 | 3329.272 | 3609.212 | 3470.991 | 3235.764 | 3266.848 | 3319.738 | 5117.272 | 3295.73 | 3464.964 |
| best | 3201.255 | 3331.043 | 3273.591 | 3507.857 | 3290.571 | 3282.225 | 3306.319 | 3224.66 | 3223.755 | 3262.373 | 4628.729 | 3245.382 | 3436.138 | |
| worst | 3224.249 | 3639.124 | 3449.777 | 4124.025 | 3421.134 | 3869.463 | 3676.979 | 3250.099 | 3311.729 | 3362.006 | 5473.508 | 3341.919 | 3489.332 | |
| std | 9.925705 | 143.5802 | 92.80698 | 264.1424 | 61.78087 | 259.6228 | 157.9012 | 11.04206 | 38.67463 | 47.4773 | 413.4343 | 40.6175 | 22.19488 | |
| median | 3217.847 | 3368.977 | 3373.61 | 3807.959 | 3302.691 | 3642.581 | 3450.333 | 3234.148 | 3265.954 | 3327.287 | 5183.427 | 3297.81 | 3467.192 | |
| rank | 1 | 8 | 7 | 12 | 6 | 11 | 10 | 2 | 3 | 5 | 13 | 4 | 9 | |
| C17-F28 | mean | 3310.389 | 3608.074 | 3279.513 | 5904.207 | 3265.216 | 5091.362 | 3573.327 | 3237.176 | 3491.163 | 3607.88 | 3556.346 | 3350.173 | 3615.139 |
| best | 3210.894 | 3491.04 | 3245.999 | 5568.396 | 3206.032 | 4122.444 | 3506.162 | 3218.46 | 3382.682 | 3493.443 | 3479.024 | 3251.203 | 3506.504 | |
| worst | 3398.371 | 3834.864 | 3314.364 | 6255.937 | 3373.749 | 6052.284 | 3629.175 | 3255.912 | 3763.179 | 3765.012 | 3718.62 | 3531.804 | 3678.771 | |
| std | 76.84487 | 160.5476 | 27.94958 | 328.4469 | 75.21557 | 889.448 | 63.20233 | 20.24324 | 181.9531 | 126.2162 | 109.5052 | 124.2419 | 75.08981 | |
| median | 3316.146 | 3553.196 | 3278.844 | 5896.247 | 3240.542 | 5095.36 | 3578.986 | 3237.165 | 3409.395 | 3586.532 | 3513.871 | 3308.842 | 3637.641 | |
| rank | 4 | 10 | 3 | 13 | 2 | 12 | 8 | 1 | 6 | 9 | 7 | 5 | 11 | |
| C17-F29 | mean | 3513.911 | 3928.315 | 4412.489 | 5807.492 | 3672.668 | 4787.271 | 5058.604 | 4072.709 | 3994.36 | 4518.153 | 5204.786 | 4232.107 | 4550.496 |
| best | 3438.997 | 3649.853 | 4031.944 | 5122.188 | 3586.227 | 4310.399 | 4512.631 | 4002.885 | 3773.157 | 4421.967 | 4908.07 | 4047.214 | 4380.996 | |
| worst | 3601.815 | 4058.043 | 4644.465 | 6750.722 | 3787.399 | 5070.882 | 5647.867 | 4125.836 | 4324.094 | 4661.445 | 5483.886 | 4365.615 | 4714.488 | |
| std | 75.06742 | 187.7454 | 271.1545 | 799.9387 | 87.08749 | 350.1526 | 515.2403 | 54.79906 | 263.3728 | 108.3907 | 309.7752 | 137.1358 | 146.445 | |
| median | 3507.415 | 4002.683 | 4486.774 | 5678.529 | 3658.523 | 4883.901 | 5036.96 | 4081.058 | 3940.094 | 4494.599 | 5213.594 | 4257.798 | 4553.251 | |
| rank | 1 | 3 | 7 | 13 | 2 | 10 | 11 | 5 | 4 | 8 | 12 | 6 | 9 | |
| C17-F30 | mean | 8305.989 | 137,769.6 | 1,529,425 | 3.03 × 109 | 9157.746 | 6.15 × 108 | 30,762,556 | 3,049,986 | 9,525,378 | 25,150,289 | 2,426,811 | 104,576.7 | 987,308.6 |
| best | 6809.307 | 59,525.81 | 539,075.8 | 2.18 × 109 | 7017.166 | 7,706,794 | 5,608,686 | 1,699,158 | 1,885,661 | 19,520,550 | 2,118,389 | 8897.047 | 568,046.1 | |
| worst | 9524.921 | 183,375.5 | 2,708,640 | 3.35 × 109 | 10,822.16 | 1.23 × 109 | 54,147,488 | 5,439,819 | 14,684,335 | 35,666,572 | 2,919,985 | 321,178.6 | 1,356,063 | |
| std | 1134.907 | 56,915.13 | 907,077.7 | 5.7 × 108 | 1704.62 | 6.99 × 108 | 19,847,912 | 1,654,366 | 6,013,987 | 7,204,436 | 345,090 | 145,516.1 | 362,444.2 | |
| median | 8444.864 | 154,088.4 | 1,434,992 | 3.3 × 109 | 9395.826 | 6.1 × 108 | 31,647,026 | 2,530,484 | 10,765,759 | 22,707,017 | 2,334,435 | 44,115.67 | 1,012,563 | |
| rank | 1 | 4 | 6 | 13 | 2 | 12 | 11 | 8 | 9 | 10 | 7 | 3 | 5 | |
| Sum rank | 44 | 183 | 192 | 366 | 57 | 324 | 307 | 122 | 167 | 248 | 245 | 165 | 219 | |
| Mean rank | 1.517241 | 6.310345 | 6.62069 | 12.62069 | 1.965517 | 11.17241 | 10.58621 | 4.206897 | 5.758621 | 8.551724 | 8.448276 | 5.689655 | 7.551724 | |
| Total rank | 1 | 6 | 7 | 13 | 2 | 12 | 11 | 3 | 5 | 10 | 9 | 4 | 8 | |
| SOA | WSO | AVOA | RSA | MPA | TSA | WOA | MVO | GWO | TLBO | GSA | PSO | GA | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C17-F1 | mean | 151,889.6 | 2.57 × 1010 | 9,830,140 | 9.96 × 1010 | 5,506,826 | 5.41 × 1010 | 7.14 × 109 | 4,797,753 | 9.99 × 109 | 2.21 × 1010 | 1.82 × 1010 | 5.74 × 109 | 8.1 × 109 |
| best | 115,387.6 | 1.88 × 1010 | 1,170,313 | 8.71 × 1010 | 3,290,149 | 3.98 × 1010 | 5.01 × 109 | 3,351,115 | 5.9 × 109 | 1.65 × 1010 | 1.45 × 1010 | 1.44 × 109 | 6.57 × 109 | |
| worst | 247,412.7 | 3.39 × 1010 | 26,012,940 | 1.09 × 1011 | 8,579,338 | 6.44 × 1010 | 1.13 × 1010 | 5,622,433 | 1.44 × 1010 | 3.09 × 1010 | 2.18 × 1010 | 1.05 × 1010 | 9.01 × 109 | |
| std | 63,842.31 | 6.64 × 109 | 11,038,046 | 9.48 × 109 | 2,249,133 | 1.16 × 1010 | 2.83 × 109 | 1,007,788 | 3.47 × 109 | 6.74 × 109 | 2.97 × 109 | 4.87 × 109 | 1.14 × 109 | |
| median | 122,379.1 | 2.51 × 1010 | 6,068,653 | 1.01 × 1011 | 5,078,909 | 5.6 × 1010 | 6.13 × 109 | 5,108,731 | 9.83 × 109 | 2.05 × 1010 | 1.83 × 1010 | 5.54 × 109 | 8.41 × 109 | |
| rank | 1 | 11 | 4 | 13 | 3 | 12 | 6 | 2 | 8 | 10 | 9 | 5 | 7 | |
| C17-F3 | mean | 25,741.16 | 109,166.7 | 155,708.8 | 167,728.7 | 27,077.85 | 109,111 | 239,463.3 | 55,133.09 | 121,422.4 | 98,432.16 | 189,072.7 | 227,319.8 | 289,533.1 |
| best | 17,748.75 | 87,516.26 | 119,637 | 152,152.9 | 18,689.86 | 93,934.99 | 149,929.1 | 35,708.23 | 109,107.7 | 82,388.28 | 170,742.6 | 169,886.5 | 206,512.9 | |
| worst | 31,049.77 | 131,269.6 | 189,453.3 | 182,838.5 | 32,278.65 | 143,029.3 | 381,283.7 | 88,723.05 | 137,403.7 | 10,7613.2 | 213,623.9 | 306,999.1 | 361,157.1 | |
| std | 5842.384 | 17,915.62 | 31,532.21 | 13,624.19 | 6102.045 | 22,781.45 | 99,541.9 | 24,999.8 | 12,061.24 | 11,298.13 | 20,728.75 | 57,433.93 | 67,162.39 | |
| median | 27,083.06 | 108,940.5 | 156,872.5 | 167,961.6 | 28,671.45 | 99,739.83 | 213,320.2 | 48,050.53 | 119,589.1 | 101,863.6 | 185,962.1 | 216,196.8 | 295,231.1 | |
| rank | 1 | 6 | 8 | 9 | 2 | 5 | 12 | 3 | 7 | 4 | 10 | 11 | 13 | |
| C17-F4 | mean | 556.8209 | 4628.003 | 711.7594 | 25,211.16 | 603.1969 | 9115.47 | 1767.649 | 592.487 | 1175.328 | 3505.154 | 3225.817 | 978.3787 | 1594.562 |
| best | 537.4312 | 3095.048 | 692.7891 | 16,625.85 | 544.7605 | 7469.591 | 1392.045 | 533.3314 | 951.1455 | 2035.156 | 2692.306 | 831.7601 | 1584.14 | |
| worst | 600.4123 | 6512.632 | 744.1292 | 30,113.72 | 642.9742 | 11,041.53 | 2186.232 | 633.6151 | 1702.492 | 5193.195 | 3440.077 | 1063.683 | 1605.234 | |
| std | 29.38858 | 1751.262 | 22.72217 | 6158.629 | 43.34086 | 1468.831 | 333.7792 | 48.89051 | 353.3024 | 1632.081 | 357.6048 | 103.4355 | 10.48297 | |
| median | 544.72 | 4452.167 | 705.0597 | 27,052.53 | 612.5264 | 8975.38 | 1746.16 | 601.5007 | 1023.838 | 3396.133 | 3385.444 | 1009.036 | 1594.437 | |
| rank | 1 | 11 | 4 | 13 | 3 | 12 | 8 | 2 | 6 | 10 | 9 | 5 | 7 | |
| C17-F5 | mean | 677.7792 | 825.0179 | 879.2559 | 1166.95 | 721.1215 | 1151.616 | 1032.234 | 716.9972 | 732.7364 | 1062.166 | 824.3543 | 843.4191 | 930.9574 |
| best | 656.4368 | 798.6558 | 847.0349 | 1146.761 | 700.2873 | 1006.991 | 966.5428 | 655.0431 | 654.3651 | 1050.273 | 768.6373 | 757.5923 | 874.5555 | |
| worst | 704.4044 | 854.3394 | 923.0372 | 1180.923 | 741.884 | 1243.544 | 1058.35 | 768.2161 | 842.6329 | 1085.351 | 863.1571 | 935.7099 | 986.5072 | |
| std | 23.359 | 23.67232 | 32.825 | 15.67259 | 16.98195 | 101.2598 | 43.90967 | 46.69174 | 80.43853 | 15.84562 | 44.50277 | 73.25487 | 46.17203 | |
| median | 675.1377 | 823.5383 | 873.4757 | 1170.059 | 721.1573 | 1177.965 | 1052.021 | 722.3649 | 716.9737 | 1056.52 | 832.8113 | 840.1871 | 931.3835 | |
| rank | 1 | 6 | 8 | 13 | 3 | 12 | 10 | 2 | 4 | 11 | 5 | 7 | 9 | |
| C17-F6 | mean | 612.5444 | 650.0934 | 663.6411 | 702.8348 | 636.3891 | 697.6476 | 697.9072 | 641.0802 | 624.8983 | 664.2849 | 661.2626 | 651.6176 | 648.1166 |
| best | 608.3547 | 647.0002 | 658.5488 | 700.4264 | 610.8922 | 689.7925 | 695.4772 | 627.1604 | 621.0722 | 655.5853 | 656.0718 | 644.4713 | 637.0315 | |
| worst | 618.0937 | 652.6056 | 669.415 | 705.9343 | 658.9156 | 705.5216 | 701.5624 | 662.1438 | 634.2509 | 670.3405 | 664.3465 | 656.3579 | 653.6417 | |
| std | 4.065504 | 2.809484 | 5.020008 | 2.578301 | 21.6058 | 6.447668 | 2.764061 | 15.49878 | 6.284174 | 6.536734 | 3.64112 | 5.419492 | 7.510199 | |
| median | 611.8646 | 650.3839 | 663.3002 | 702.4892 | 637.8744 | 697.6381 | 697.2946 | 637.5083 | 622.1351 | 665.6069 | 662.3161 | 652.8207 | 650.8966 | |
| rank | 1 | 6 | 9 | 13 | 3 | 11 | 12 | 4 | 2 | 10 | 8 | 7 | 5 | |
| C17-F7 | mean | 1020.053 | 1634.936 | 1719.618 | 1959.322 | 1061.083 | 1830.724 | 1790.789 | 1104.083 | 1082.367 | 1452.483 | 1449.5 | 1226.391 | 1392.31 |
| best | 984.9752 | 1274.275 | 1644.257 | 1873.413 | 1012.389 | 1488.422 | 1657.407 | 1042.23 | 977.2225 | 1415.913 | 1271.118 | 1090.999 | 1331.588 | |
| worst | 1069.875 | 1936.749 | 1789.939 | 2069.047 | 1096.42 | 2051.525 | 1928.988 | 1216.458 | 1156.252 | 1470.253 | 1586.373 | 1346.737 | 1447.051 | |
| std | 36.24558 | 272.8645 | 61.93246 | 83.88886 | 35.62031 | 252.3578 | 135.164 | 77.13688 | 75.41492 | 24.69756 | 142.0339 | 110.3465 | 48.90072 | |
| median | 1012.68 | 1664.36 | 1722.138 | 1947.414 | 1067.762 | 1891.475 | 1788.38 | 1078.822 | 1097.996 | 1461.884 | 1470.255 | 1233.914 | 1395.3 | |
| rank | 1 | 9 | 10 | 13 | 2 | 12 | 11 | 4 | 3 | 8 | 7 | 5 | 6 | |
| C17-F8 | mean | 992.8944 | 1119.935 | 1143.249 | 1485.684 | 1054.1 | 1501.057 | 1300.005 | 1093.326 | 1037.12 | 1343.492 | 1160.173 | 1090.87 | 1239.259 |
| best | 958.4409 | 1089.39 | 1094.35 | 1452.256 | 984.2098 | 1375.148 | 1199.351 | 1031.358 | 993.6126 | 1294.575 | 1151.218 | 1064.359 | 1164.301 | |
| worst | 1018.161 | 1182.289 | 1193.203 | 1509.275 | 1144.524 | 1561.062 | 1386.4 | 1211.078 | 1054.829 | 1379.624 | 1175.097 | 1135.192 | 1276.922 | |
| std | 25.38413 | 43.54379 | 56.20376 | 23.96556 | 67.8529 | 87.41298 | 78.03448 | 81.14765 | 29.12162 | 38.09022 | 10.62307 | 31.92935 | 53.04527 | |
| median | 997.4879 | 1104.031 | 1142.721 | 1490.603 | 1043.832 | 1534.009 | 1307.133 | 1065.433 | 1050.02 | 1349.885 | 1157.188 | 1081.965 | 1257.907 | |
| rank | 1 | 6 | 7 | 12 | 3 | 13 | 10 | 5 | 2 | 11 | 8 | 4 | 9 | |
| C17-F9 | mean | 3379.968 | 31,574.54 | 13,994.58 | 38,384.66 | 3535.572 | 43,997.3 | 38,999.55 | 12,924.53 | 10,955.82 | 24,490.33 | 11,230.46 | 13,220.99 | 11,936.19 |
| best | 2720.798 | 27,546.88 | 13,334.96 | 36,059.86 | 2795.909 | 34,228.79 | 27,771.85 | 4379.022 | 7695.713 | 17,011.15 | 10,226.78 | 8972.343 | 9776.976 | |
| worst | 4482.205 | 35,368.01 | 14,911.51 | 40,280.9 | 4766.806 | 51,238.8 | 57,115.19 | 20,429.49 | 13,132.49 | 27,535.96 | 12,132.64 | 21,544.05 | 14,035.6 | |
| std | 766.3366 | 4276.902 | 681.8704 | 1998.844 | 858.076 | 7407.689 | 12,869.39 | 8072.639 | 2466.082 | 5024.465 | 792.2221 | 5669.612 | 2264.86 | |
| median | 3158.435 | 31,691.64 | 13,865.93 | 38,598.94 | 3289.786 | 45,260.8 | 35,555.58 | 13,444.81 | 11,497.54 | 26,707.11 | 11,281.22 | 11,183.79 | 11,966.1 | |
| rank | 1 | 10 | 8 | 11 | 2 | 13 | 12 | 6 | 3 | 9 | 4 | 7 | 5 | |
| C17-F10 | mean | 6174.072 | 7403.704 | 8579.601 | 14,818.96 | 6667.021 | 13,370.03 | 12,530.29 | 7041.612 | 7036.968 | 14,639.16 | 8868.741 | 8635.025 | 11,353.66 |
| best | 5757.895 | 6703.828 | 8018.602 | 14,572.31 | 5919.308 | 12,643.44 | 11,659.82 | 6312.651 | 6849.65 | 13,468.42 | 7973.388 | 7336.097 | 10,137.65 | |
| worst | 6627.51 | 7941.478 | 9205.324 | 15,177.46 | 7192.289 | 13,961.87 | 13,907.52 | 7530.854 | 7297.502 | 15,497.98 | 9980.347 | 9821.611 | 11,876.02 | |
| std | 461.6323 | 515.452 | 503.2166 | 286.0404 | 585.7901 | 662.7266 | 1020.996 | 557.1729 | 220.1985 | 848.7871 | 837.357 | 1033.431 | 825.7338 | |
| median | 6155.442 | 7484.756 | 8547.239 | 14,763.03 | 6778.245 | 13,437.41 | 12,276.92 | 7161.472 | 7000.36 | 14,795.11 | 8760.614 | 8691.196 | 11,700.49 | |
| rank | 1 | 5 | 6 | 13 | 2 | 11 | 10 | 4 | 3 | 12 | 8 | 7 | 9 | |
| C17-F11 | mean | 1334.96 | 4491.299 | 1635.402 | 22,214.14 | 1309.933 | 10,609.27 | 3565.628 | 1464.313 | 8372.954 | 5000.771 | 15,005.37 | 1892.931 | 15,726.03 |
| best | 1281.171 | 3159.729 | 1507.538 | 19,751.85 | 1305.562 | 6841.722 | 3031.132 | 1362.16 | 4716.472 | 4243.983 | 14,069.52 | 1462.895 | 11,246.91 | |
| worst | 1372.22 | 6882.562 | 1798.581 | 24,081.65 | 1315.877 | 15,049.35 | 3780.766 | 1592.317 | 12,480.16 | 5708.219 | 17,016.79 | 2863.255 | 19,576.5 | |
| std | 38.83575 | 1664.8 | 134.2452 | 1809.233 | 4.400385 | 4211.171 | 358.468 | 112.5475 | 3546.225 | 655.6899 | 1355.471 | 655.2459 | 3430.853 | |
| median | 1343.224 | 3961.453 | 1617.745 | 22,511.53 | 1309.145 | 10,273 | 3725.307 | 1451.387 | 8147.593 | 5025.441 | 14,467.58 | 1622.787 | 16,040.36 | |
| rank | 2 | 7 | 4 | 13 | 1 | 10 | 6 | 3 | 9 | 8 | 11 | 5 | 12 | |
| C17-F12 | mean | 11,251,731 | 5.27 × 109 | 78,049,621 | 7.57 × 1010 | 12,693,027 | 1.72 × 1010 | 1.61 × 109 | 98,207,747 | 1.57 × 109 | 3.95 × 109 | 2.31 × 109 | 1.16 × 109 | 2.07 × 108 |
| best | 10,038,799 | 1.65 × 109 | 33,060,130 | 5.52 × 1010 | 9,956,212 | 7.73 × 109 | 8.92 × 108 | 63,359,996 | 3.8 × 108 | 2.82 × 109 | 7.6 × 108 | 2.74 × 108 | 96,807,585 | |
| worst | 12,129,544 | 9.38 × 109 | 1.21 × 108 | 1.04 × 1011 | 18,145,198 | 2.85 × 1010 | 2.96 × 109 | 1.62 × 108 | 2.93 × 109 | 5.13 × 109 | 4.15 × 109 | 1.74 × 109 | 3.39 × 108 | |
| std | 1,025,491 | 3.48 × 109 | 46,894,592 | 2.24 × 1010 | 3,729,890 | 8.96 × 109 | 9.5 × 108 | 46,032,952 | 1.37 × 109 | 9.8 × 108 | 1.4 × 109 | 6.93 × 108 | 1.02 × 108 | |
| median | 11,419,290 | 5.02 × 109 | 79,267,889 | 7.19 × 1010 | 11,335,349 | 1.62 × 1010 | 1.3 × 109 | 83,612,325 | 1.48 × 109 | 3.93 × 109 | 2.16 × 109 | 1.32 × 109 | 1.95 × 108 | |
| rank | 1 | 11 | 3 | 13 | 2 | 12 | 8 | 4 | 7 | 10 | 9 | 6 | 5 | |
| C17-F13 | mean | 25,194.61 | 7.45 × 108 | 158,443 | 4.58 × 1010 | 29,207.77 | 1.23 × 1010 | 1.55 × 108 | 169,862.1 | 2.14 × 108 | 6.76 × 108 | 19,712,046 | 2.11 × 108 | 26,307,383 |
| best | 14,947.67 | 39,849,034 | 36,363.7 | 2.32 × 1010 | 14,829.62 | 5.77 × 109 | 72,249,484 | 89,730.53 | 1.19 × 108 | 4.77 × 108 | 33,125.95 | 60217.58 | 6,804,282 | |
| worst | 35,197.79 | 2.32 × 109 | 349,245.4 | 6.59 × 1010 | 49,867.22 | 1.62 × 1010 | 2.35 × 108 | 250,596.3 | 3.63 × 108 | 7.89 × 108 | 66,446,165 | 5.9 × 108 | 43,575,192 | |
| std | 10,557.9 | 1.08 × 109 | 133,793.4 | 1.79 × 1010 | 16,453.73 | 4.55 × 109 | 67,992,278 | 65,749.65 | 1.14 × 108 | 1.41 × 108 | 31,690,714 | 2.77 × 108 | 15,084,746 | |
| median | 25,316.49 | 3.12 × 108 | 124,081.5 | 4.71 × 1010 | 26,067.12 | 1.36 × 1010 | 1.56 × 108 | 169,560.9 | 1.88 × 108 | 7.19 × 108 | 6184,447 | 1.28 × 108 | 27,425,029 | |
| rank | 1 | 11 | 3 | 13 | 2 | 12 | 7 | 4 | 9 | 10 | 5 | 8 | 6 | |
| C17-F14 | mean | 1561.629 | 954,429.1 | 1301,714 | 51,521,240 | 1644.844 | 11,042,571 | 6537,253 | 338,362 | 2,186,341 | 1,214,913 | 16,125,876 | 177,015.6 | 11,328,374 |
| best | 1551.57 | 40,522.92 | 403,134.7 | 15,801,584 | 1610.492 | 744,015.3 | 1234,192 | 193,899.1 | 117,686.7 | 1,015,556 | 3,656,077 | 54,705.12 | 8,041,233 | |
| worst | 1569.011 | 2,245,963 | 3,100,586 | 1.04 × 108 | 1665.859 | 38,689,467 | 18,106,774 | 480,695.4 | 4,353,688 | 1,446,289 | 26,477,284 | 410,064.8 | 15,650,354 | |
| std | 7.48164 | 929,949.3 | 1226,148 | 37,650,671 | 24.55157 | 18,475,034 | 7,877,558 | 121,825.3 | 2,228,784 | 193,566.3 | 10,346,083 | 15,8781.1 | 3165,277 | |
| median | 1562.968 | 765,615.1 | 851,568.7 | 42,984,409 | 1651.514 | 2,368,402 | 3,404,022 | 339,426.6 | 2,136,996 | 1,198,904 | 17,185,072 | 121,646.3 | 10,810,955 | |
| rank | 1 | 5 | 7 | 13 | 2 | 10 | 9 | 4 | 8 | 6 | 12 | 3 | 11 | |
| C17-F15 | mean | 2088.202 | 84,644.13 | 40,352.97 | 4.46 × 109 | 2168.064 | 2.15 × 109 | 45,457,765 | 106,616 | 23,648,137 | 50,130,625 | 2.1 × 108 | 20,135.54 | 13,007,299 |
| best | 2001.116 | 19,632.75 | 24,871.69 | 3.48 × 109 | 2081.998 | 7332003 | 12,695,487 | 61,228.51 | 114,896.2 | 24,391,486 | 20291.99 | 2938.625 | 1,429,335 | |
| worst | 2202.268 | 176,250.9 | 74,394 | 5.28 × 109 | 2262.088 | 6.23 × 109 | 86,925,294 | 163,102.2 | 42,481,430 | 77,779,135 | 8.16 × 108 | 40,169.41 | 25,370,774 | |
| std | 84.61488 | 66,115.44 | 22,955.17 | 7.97 × 108 | 77.26539 | 2.81 × 109 | 35,216,059 | 42,226.99 | 18,140,241 | 25,125,637 | 4.04 × 108 | 17,100.37 | 9,825,680 | |
| median | 2074.712 | 71,346.42 | 31,073.09 | 4.53 × 109 | 2164.086 | 1.19 × 109 | 41,105,139 | 101,066.6 | 25,998,110 | 49,175,940 | 12,713,833 | 18,717.06 | 12,614,543 | |
| rank | 1 | 5 | 4 | 13 | 2 | 12 | 9 | 6 | 8 | 10 | 11 | 3 | 7 | |
| C17-F16 | mean | 2737.231 | 3413.809 | 4503.424 | 7943.425 | 2910.262 | 5681.85 | 6366.838 | 3202.22 | 3082.343 | 5298.307 | 4079.109 | 3392.654 | 3966.724 |
| best | 2549.162 | 2716.472 | 4180.052 | 5899.312 | 2532.098 | 4684.45 | 5729.784 | 2828.437 | 2728.369 | 5156.685 | 3701.751 | 2883.776 | 3447.318 | |
| worst | 2910.818 | 3865.438 | 4935.667 | 11,948.51 | 3329.982 | 6106.082 | 6736.105 | 3693.078 | 3311.269 | 5434.487 | 4494.833 | 3690.971 | 4613.582 | |
| std | 148.0198 | 530.6386 | 363.5425 | 2755.255 | 326.6354 | 668.1979 | 465.9646 | 390.8859 | 248.6798 | 114.3378 | 375.0628 | 374.9784 | 542.6677 | |
| median | 2744.471 | 3536.663 | 4448.988 | 6962.941 | 2889.485 | 5968.433 | 6500.731 | 3143.683 | 3144.867 | 5301.028 | 4059.925 | 3497.935 | 3902.998 | |
| rank | 1 | 6 | 9 | 13 | 2 | 11 | 12 | 4 | 3 | 10 | 8 | 5 | 7 | |
| C17-F17 | mean | 2573.195 | 3002.378 | 3658.258 | 11,639.65 | 2700.396 | 5430.256 | 4790.562 | 3274.99 | 2870.234 | 3934.082 | 3937.182 | 3256.484 | 3396.164 |
| best | 2411.363 | 2677.716 | 3193.284 | 8466.86 | 2459.043 | 3655.951 | 3430.344 | 2935.277 | 2516.354 | 3671.376 | 3461.219 | 3075.895 | 3257.524 | |
| worst | 2687.187 | 3690.493 | 4212.583 | 15,174.64 | 2833.242 | 7076.82 | 5593.094 | 3534.417 | 3082.95 | 4167.482 | 4255.079 | 3551.107 | 3543.127 | |
| std | 115.9525 | 464.2714 | 492.9618 | 2763.849 | 165.2191 | 1442.127 | 967.311 | 265.5602 | 264.1476 | 206.5056 | 348.598 | 224.8963 | 117.1755 | |
| median | 2597.115 | 2820.652 | 3613.583 | 11,458.55 | 2754.65 | 5494.126 | 5069.405 | 3315.133 | 2940.815 | 3948.735 | 4016.215 | 3199.467 | 3392.002 | |
| rank | 1 | 4 | 8 | 13 | 2 | 12 | 11 | 6 | 3 | 9 | 10 | 5 | 7 | |
| C17-F18 | mean | 14,578.01 | 2,805,300 | 2,568,723 | 1.2 × 108 | 15,143.98 | 45,107,782 | 61,393,853 | 2,423,534 | 21,017,655 | 8731,271 | 8,959,584 | 832,165.9 | 16,730,316 |
| best | 4589.064 | 379,650.7 | 332,655.2 | 53,792,821 | 4782.991 | 5,112,949 | 12,472,675 | 1,316,487 | 3,654,688 | 2,959,680 | 4,236,144 | 500,424.3 | 7,543,771 | |
| worst | 30,709.1 | 5,279,270 | 4,705,067 | 1.66 × 108 | 32,192.73 | 1.12 × 108 | 1.43 × 108 | 3,480,084 | 64,837,312 | 21,724,952 | 16,743,556 | 1,208,421 | 21,978,246 | |
| std | 11,718.82 | 2,146,247 | 2,215,520 | 55,161,299 | 12,301.32 | 47,374,611 | 61,960,905 | 1,015,362 | 29,414,178 | 8,763,297 | 5,701,618 | 292,071.8 | 6,671,844 | |
| median | 11,506.93 | 2,781,141 | 2,618,585 | 1.29 × 108 | 11,800.09 | 31,796,854 | 44,854,458 | 2,448,782 | 7,789,311 | 5,120,226 | 7,429,317 | 809,909.1 | 18,699,624 | |
| rank | 1 | 6 | 5 | 13 | 2 | 11 | 12 | 4 | 10 | 7 | 8 | 3 | 9 | |
| C17-F19 | mean | 2108.057 | 159,032.8 | 276,582.5 | 4.09 × 109 | 2212.473 | 1.16 × 109 | 3,880,347 | 5,795,751 | 11,522,364 | 69,314,944 | 481,438.7 | 27,395.04 | 852,195.6 |
| best | 2041.296 | 36,866.49 | 96,991.5 | 2.76 × 109 | 2118.389 | 10389370 | 424,737.4 | 1,799,228 | 2,465,418 | 29,753,913 | 276,793.4 | 6758.912 | 657,534.7 | |
| worst | 2184.699 | 419,582.6 | 570,566.3 | 5.06 × 109 | 2328.246 | 2.36 × 109 | 7,483,304 | 9,042,447 | 32,549,618 | 1.43 × 108 | 1,055,175 | 78,011.97 | 1,075,172 | |
| std | 77.04148 | 178,299 | 205,522.6 | 1.02 × 109 | 108.4181 | 1.32 × 109 | 3,181,528 | 3,059,230 | 14,306,749 | 52,264,278 | 382,629.3 | 33,896.96 | 171,296 | |
| median | 2103.117 | 89,841.03 | 219,386.1 | 4.27 × 109 | 2201.628 | 1.14 × 109 | 3,806,673 | 6,170,664 | 5,537,210 | 52,379,219 | 296,893.2 | 12,404.65 | 838,037.7 | |
| rank | 1 | 4 | 5 | 13 | 2 | 12 | 8 | 9 | 10 | 11 | 6 | 3 | 7 | |
| C17-F20 | mean | 2547.209 | 3273.289 | 3337.748 | 4223.731 | 2931.538 | 3847.953 | 4145.357 | 3157.849 | 3220.128 | 3846.377 | 4165.34 | 3170.407 | 3108.672 |
| best | 2498.065 | 2844.233 | 2688.235 | 3927.478 | 2786.566 | 3412.071 | 3572.722 | 2814.451 | 2952.323 | 3618.013 | 3846.16 | 2963.648 | 3017.065 | |
| worst | 2648.126 | 3919.758 | 3912.457 | 4391.213 | 3205.982 | 4148.526 | 4368.731 | 3500.378 | 3597.963 | 4078.028 | 4468.586 | 3305.249 | 3201.274 | |
| std | 68.60929 | 507.0025 | 524.2096 | 204.2398 | 187.4237 | 312.5293 | 382.4528 | 282.9635 | 276.6289 | 252.1705 | 255.2723 | 155.2787 | 92.03002 | |
| median | 2521.322 | 3164.582 | 3375.15 | 4288.117 | 2866.802 | 3915.608 | 4319.989 | 3158.283 | 3165.113 | 3844.734 | 4173.307 | 3206.364 | 3108.174 | |
| rank | 1 | 7 | 8 | 13 | 2 | 10 | 11 | 4 | 6 | 9 | 12 | 5 | 3 | |
| C17-F21 | mean | 2461.015 | 2750.03 | 2785.955 | 3080.695 | 2442.558 | 2978.155 | 3074.598 | 2538.401 | 2541.013 | 2858.889 | 2878.604 | 2691.435 | 2775.299 |
| best | 2454.062 | 2655.45 | 2655.912 | 2968.624 | 2438.788 | 2961.782 | 2916.837 | 2465.581 | 2500.98 | 2816.416 | 2802.947 | 2602.644 | 2699.723 | |
| worst | 2467.75 | 2890.739 | 2985.839 | 3173.847 | 2445.937 | 3018.498 | 3252.448 | 2618.492 | 2568.759 | 2900.466 | 2921.082 | 2738.388 | 2838.696 | |
| std | 5.753449 | 100.6273 | 142.2127 | 97.29591 | 3.785764 | 26.98508 | 139.2031 | 75.69416 | 28.66691 | 35.38466 | 53.10801 | 60.48597 | 63.22481 | |
| median | 2461.123 | 2726.966 | 2751.035 | 3090.154 | 2442.753 | 2966.17 | 3064.553 | 2534.767 | 2547.157 | 2859.337 | 2895.194 | 2712.354 | 2781.388 | |
| rank | 2 | 6 | 8 | 13 | 1 | 11 | 12 | 3 | 4 | 9 | 10 | 5 | 7 | |
| C17-F22 | mean | 5068.179 | 10,601.63 | 11,695.73 | 17,156.72 | 5289.649 | 14,744.41 | 14,773.48 | 9918.28 | 8391.527 | 16,328.37 | 12,006.95 | 11,379.86 | 11,852.76 |
| best | 2317.659 | 9792.013 | 9254.48 | 16,976.74 | 2386.837 | 13,539.03 | 12,269.29 | 9328.101 | 6397.783 | 15,366.03 | 11,736.64 | 9262.03 | 5080.869 | |
| worst | 8010.131 | 11,189.41 | 13,600.29 | 17,419.31 | 8618.209 | 15,424.94 | 16,718.84 | 10,360.01 | 10,211.59 | 17,081.38 | 12,207.05 | 13,321.13 | 15,030.32 | |
| std | 3175.556 | 587.4619 | 1976.242 | 202.7537 | 3338.394 | 827.801 | 1899.776 | 440.2749 | 1597.655 | 721.302 | 208.2034 | 1660.84 | 4566.475 | |
| median | 4972.464 | 10,712.55 | 11,964.08 | 17,115.42 | 5076.776 | 15,006.83 | 15052.9 | 9992.504 | 8478.367 | 16,433.04 | 12,042.05 | 11,468.14 | 13,649.93 | |
| rank | 1 | 5 | 7 | 13 | 2 | 10 | 11 | 4 | 3 | 12 | 9 | 6 | 8 | |
| C17-F23 | mean | 2879.864 | 3742.803 | 3333.282 | 3984.37 | 3013.484 | 4203.96 | 3625.626 | 2987.978 | 3030.149 | 3353.519 | 4909.23 | 3393.538 | 3411.219 |
| best | 2819.095 | 3528.564 | 3242.024 | 3931.858 | 2911.823 | 3785.87 | 3524.337 | 2952.645 | 2998.021 | 3281.372 | 4698.938 | 3325.579 | 3287.366 | |
| worst | 2929.666 | 3941.54 | 3420.534 | 4030.28 | 3057.88 | 4675.038 | 3725.834 | 3017.048 | 3058.198 | 3472.351 | 5093.602 | 3455.819 | 3511.652 | |
| std | 45.73851 | 215.66 | 84.27723 | 41.04961 | 68.2742 | 415.8831 | 87.17086 | 27.56366 | 26.83748 | 82.51679 | 161.8938 | 53.58173 | 114.0835 | |
| median | 2885.347 | 3750.553 | 3335.286 | 3987.67 | 3042.116 | 4177.466 | 3626.167 | 2991.11 | 3032.189 | 3330.177 | 4922.189 | 3396.376 | 3422.929 | |
| rank | 1 | 10 | 5 | 11 | 3 | 12 | 9 | 2 | 4 | 6 | 13 | 7 | 8 | |
| C17-F24 | mean | 3083.504 | 4142.676 | 3560.758 | 4611.799 | 3081.981 | 4037.358 | 3901.95 | 3096.846 | 3208.072 | 3525.045 | 4499.5 | 3660.766 | 3832.45 |
| best | 3015.965 | 3876.67 | 3440.367 | 4085.627 | 3000.511 | 3762.786 | 3823.238 | 3056.288 | 3106.145 | 3473.443 | 4461.401 | 3604.282 | 3679.231 | |
| worst | 3132.978 | 4662.206 | 3761.438 | 5903.316 | 3136.003 | 4367.077 | 3988.185 | 3126.944 | 3377.68 | 3567.211 | 4558.036 | 3744.37 | 4008.357 | |
| std | 51.40778 | 355.0229 | 139.0862 | 869.707 | 58.68838 | 279.9751 | 68.7295 | 29.97032 | 117.5406 | 46.10856 | 44.92477 | 64.59743 | 155.6822 | |
| median | 3092.536 | 4015.914 | 3520.614 | 4229.127 | 3095.705 | 4009.785 | 3898.188 | 3102.076 | 3174.232 | 3529.763 | 4489.28 | 3647.206 | 3821.106 | |
| rank | 2 | 11 | 6 | 13 | 1 | 10 | 9 | 3 | 4 | 5 | 12 | 7 | 8 | |
| C17-F25 | mean | 3068.733 | 4544.506 | 3193.318 | 12,627.24 | 3087.808 | 6295.735 | 4867.662 | 3090.15 | 3831.696 | 4514.777 | 4376.108 | 3145.639 | 4421.074 |
| best | 3046.855 | 3802.561 | 3163.265 | 10,093.24 | 3054.996 | 5817.769 | 4493.166 | 3057.295 | 3605.51 | 3911.35 | 4001.137 | 3096.16 | 4179.04 | |
| worst | 3077.521 | 5346.191 | 3243.541 | 14,183.95 | 3131.849 | 6738.606 | 5247.977 | 3113.089 | 4055.253 | 4952.488 | 5087.889 | 3185.549 | 4659.918 | |
| std | 14.64504 | 632.2521 | 34.79092 | 1922.174 | 33.4426 | 392.6728 | 344.0079 | 23.71 | 233.4356 | 519.0428 | 511.0707 | 39.00329 | 196.3794 | |
| median | 3075.279 | 4514.635 | 3183.232 | 13,115.89 | 3082.194 | 6313.284 | 4864.752 | 3095.108 | 3833.011 | 4597.634 | 4207.703 | 3150.422 | 4422.67 | |
| rank | 1 | 10 | 5 | 13 | 2 | 12 | 11 | 3 | 6 | 9 | 7 | 4 | 8 | |
| C17-F26 | mean | 4455.594 | 10,887.89 | 11,546.28 | 15,965.14 | 4869.194 | 14,453.46 | 15,596.31 | 6182.373 | 7275.879 | 9760.462 | 12,162.55 | 7406.202 | 7234.428 |
| best | 3501.58 | 6702.71 | 10,993.2 | 15,295.97 | 3470.604 | 13,342.37 | 14,726.99 | 5832.205 | 6155.413 | 9467.029 | 11,786.48 | 3655.993 | 6898.45 | |
| worst | 6191.431 | 13,062.05 | 12,099.17 | 16,992.01 | 6448.084 | 15,734.17 | 16,328.64 | 6713.88 | 8916.753 | 10,118.65 | 12,597.7 | 9175.091 | 7781.243 | |
| std | 1226.994 | 2918.176 | 452.4794 | 735.8058 | 1422.756 | 985.4345 | 658.776 | 386.3427 | 1291.61 | 270.3168 | 338.5611 | 2584.358 | 392.6468 | |
| median | 4064.682 | 11,893.4 | 11,546.38 | 15,786.29 | 4779.045 | 14,368.66 | 15,664.8 | 6091.705 | 7015.674 | 9728.086 | 12,133.01 | 8396.863 | 7129.01 | |
| rank | 1 | 8 | 9 | 13 | 2 | 11 | 12 | 3 | 5 | 7 | 10 | 6 | 4 | |
| C17-F27 | mean | 3363.189 | 4366.514 | 3897.689 | 5125.112 | 3448.795 | 5237.028 | 4903.756 | 3470.777 | 3717.304 | 3693.737 | 8470.607 | 3854.516 | 4433.001 |
| best | 3320.606 | 4286.133 | 3848.523 | 4720.746 | 3366.621 | 4761.12 | 4426.306 | 3432.261 | 3636.637 | 3635.281 | 8197.85 | 3698.911 | 4182.635 | |
| worst | 3430.944 | 4491.872 | 3970.348 | 5408.718 | 3607.609 | 5915.32 | 5499.852 | 3571.634 | 3830.143 | 3756.612 | 8860.917 | 4102.243 | 4668.505 | |
| std | 49.36455 | 94.88507 | 54.71087 | 330.3539 | 110.5841 | 485.8052 | 449.642 | 67.53284 | 87.25992 | 55.50564 | 322.7935 | 173.0623 | 198.6077 | |
| median | 3350.604 | 4344.025 | 3885.944 | 5185.491 | 3410.475 | 5135.835 | 4844.433 | 3439.606 | 3701.218 | 3691.528 | 8411.831 | 3808.456 | 4440.433 | |
| rank | 1 | 8 | 7 | 11 | 2 | 12 | 10 | 3 | 5 | 4 | 13 | 6 | 9 | |
| C17-F28 | mean | 3304.026 | 5927.069 | 3619.749 | 11,797.14 | 3373.545 | 6674.615 | 5136.264 | 3310.385 | 4426.418 | 5582.872 | 5201.752 | 3869.901 | 4966.713 |
| best | 3279.151 | 5470.669 | 3530.722 | 10,414.72 | 3341.683 | 5799.475 | 4614.257 | 3301.588 | 4091.054 | 4696.446 | 5136.095 | 3456.669 | 4889.397 | |
| worst | 3330.152 | 6322.616 | 3716.895 | 15,468.78 | 3429.377 | 8088.887 | 5807.894 | 3314.652 | 4863.695 | 6048.066 | 5331.294 | 4264.888 | 5054.661 | |
| std | 21.30892 | 374.6972 | 91.86549 | 2452.27 | 38.51731 | 1032.791 | 510.3959 | 6.127407 | 361.6129 | 603.6288 | 88.70492 | 382.4002 | 75.04482 | |
| median | 3303.4 | 5957.496 | 3615.689 | 10,652.52 | 3361.561 | 6405.05 | 5061.453 | 3312.649 | 4375.462 | 5793.489 | 5169.809 | 3879.023 | 4961.397 | |
| rank | 1 | 11 | 4 | 13 | 3 | 12 | 8 | 2 | 6 | 10 | 9 | 5 | 7 | |
| C17-F29 | mean | 4311.503 | 5508.011 | 5680.663 | 20,771.09 | 4536.4 | 8098.192 | 8442.254 | 5166.941 | 4755.15 | 6354.818 | 8566.63 | 5084.367 | 6583.69 |
| best | 4038.342 | 4914.424 | 5522.082 | 10,858.34 | 4288.411 | 6715.261 | 6101.824 | 4992.053 | 4634.581 | 6001.988 | 7009.127 | 4698.529 | 6508.721 | |
| worst | 4509.912 | 6458.317 | 5834.624 | 33,002.78 | 4775.32 | 10,262.49 | 10,228.64 | 5303.74 | 4937.432 | 6842.113 | 11,314.84 | 5645.839 | 6630.906 | |
| std | 198.4451 | 720.6455 | 127.7043 | 9862.853 | 200.54 | 1638.244 | 1783.724 | 129.1374 | 137.3209 | 361.7188 | 1938.806 | 463.4686 | 52.64746 | |
| median | 4348.878 | 5329.651 | 5682.974 | 19,611.63 | 4540.934 | 7707.507 | 8719.274 | 5185.984 | 4724.293 | 6287.585 | 7971.274 | 4996.55 | 6597.567 | |
| rank | 1 | 6 | 7 | 13 | 2 | 10 | 11 | 5 | 3 | 8 | 12 | 4 | 9 | |
| C17-F30 | mean | 2,025,569 | 35,167,304 | 23,274,855 | 5.86 × 109 | 2,682,820 | 1.04 × 109 | 2.59 × 108 | 80,472,757 | 1.24 × 108 | 2.86 × 108 | 1.97 × 108 | 5990,562 | 58,956,549 |
| best | 1,181,088 | 23,290,188 | 14,200,523 | 3.6 × 109 | 1,328,294 | 1.77 × 108 | 98,570,183 | 51,907,046 | 73641400 | 1.95 × 108 | 1.51 × 108 | 1211,278 | 45,838,053 | |
| worst | 2,875,328 | 42,761,447 | 31,913,446 | 9.19 × 109 | 3,372,211 | 2.89 × 109 | 4.62 × 108 | 1.34 × 108 | 1.7 × 108 | 5.03 × 108 | 2.58 × 108 | 18,526,499 | 66,979,535 | |
| std | 698,314.3 | 8,325,550 | 8701,063 | 2.41 × 109 | 918,657.5 | 1.26 × 109 | 1.52 × 108 | 37,734,532 | 41,204,160 | 1.47 × 108 | 449,807,88 | 8,368,296 | 9,118,859 | |
| median | 2,022,930 | 37,308,790 | 23,492,726 | 5.32 × 109 | 3,015,388 | 5.51 × 108 | 2.37 × 108 | 68,043,751 | 1.27 × 108 | 2.22 × 108 | 1.89 × 108 | 2,112,235 | 61,504,304 | |
| rank | 1 | 5 | 4 | 13 | 2 | 12 | 10 | 7 | 8 | 11 | 9 | 3 | 6 | |
| Sum rank | 32 | 216 | 182 | 366 | 62 | 325 | 287 | 115 | 159 | 256 | 264 | 157 | 218 | |
| Mean rank | 1.103448 | 7.448276 | 6.275862 | 12.62069 | 2.137931 | 11.2069 | 9.896552 | 3.965517 | 5.482759 | 8.827586 | 9.103448 | 5.413793 | 7.517241 | |
| Total rank | 1 | 7 | 6 | 13 | 2 | 12 | 11 | 3 | 5 | 9 | 10 | 4 | 8 | |
| SOA | WSO | AVOA | RSA | MPA | TSA | WOA | MVO | GWO | TLBO | GSA | PSO | GA | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C17-F1 | mean | 160,265.1 | 1.19 × 1011 | 4.08 × 109 | 2.48 × 1011 | 5 × 108 | 1.31 × 1011 | 6.53 × 1010 | 67,475,871 | 5.52 × 1010 | 9.46 × 1010 | 1.4 × 1011 | 2.14 × 1010 | 6.99 × 1010 |
| best | 138,023.5 | 1.11 × 1011 | 1.98 × 109 | 2.44 × 1011 | 3.71 × 108 | 1.18 × 1011 | 6.11 × 1010 | 57,348,883 | 3.89 × 1010 | 7.98 × 1010 | 1.18 × 1011 | 1.65 × 1010 | 6.09 × 1010 | |
| worst | 207,953.1 | 1.25 × 1011 | 5.86 × 109 | 2.5 × 1011 | 7.33 × 108 | 1.47 × 1011 | 6.77 × 1010 | 77,330,536 | 6.37 × 1010 | 1.12 × 1011 | 1.58 × 1011 | 2.72 × 1010 | 7.63 × 1010 | |
| std | 32,666.58 | 5.84 × 109 | 1.59 × 109 | 2.86 × 109 | 1.6 × 108 | 1.44 × 1010 | 2.97 × 109 | 10,406,022 | 1.16 × 1010 | 1.35 × 1010 | 1.71 × 1010 | 4.42 × 109 | 6.58 × 109 | |
| median | 147,541.9 | 1.2 × 1011 | 4.23 × 109 | 2.49 × 1011 | 4.47 × 108 | 1.3 × 1011 | 6.61 × 1010 | 67,612,033 | 5.91 × 1010 | 9.31 × 1010 | 1.42 × 1011 | 2.1 × 1010 | 7.13 × 1010 | |
| rank | 1 | 10 | 4 | 13 | 3 | 11 | 7 | 2 | 6 | 9 | 12 | 5 | 8 | |
| C17-F3 | mean | 155,460.5 | 284,175.9 | 347,477.9 | 343,395.2 | 163,200.2 | 375,331.1 | 977,486.3 | 500,947.0 | 389,167.5 | 329,791.4 | 365,707.5 | 607,827.5 | 654,898.7 |
| best | 136,109.2 | 248,717.4 | 339,354.5 | 331,243.9 | 142,444.6 | 312,194.3 | 943,418.6 | 444,428.5 | 374,416.5 | 301,764.9 | 354,759.5 | 419,980.8 | 516,193.8 | |
| worst | 164,612.9 | 309,081.9 | 355,262.9 | 350,541.3 | 173,294.4 | 415,302.3 | 1,042,632.0 | 632,522.5 | 415,170.4 | 355,744.3 | 377,857.9 | 772,544 | 754,873.2 | |
| std | 13,110.98 | 28,313.85 | 6723.431 | 9036.029 | 14,518.07 | 44,174.85 | 46,210.51 | 88,310.45 | 17,980.22 | 29,865.05 | 9617.273 | 14,9726.7 | 116,056.6 | |
| median | 160,559.9 | 289,452.2 | 347,647.2 | 345,897.8 | 168,530.8 | 386,913.8 | 961,947.5 | 463,418.4 | 383,541.7 | 330,828.1 | 365,106.3 | 619,392.6 | 674,264 | |
| rank | 1 | 3 | 6 | 5 | 2 | 8 | 13 | 10 | 9 | 4 | 7 | 11 | 12 | |
| C17-F4 | mean | 707.8421 | 19,140.58 | 1615.548 | 79,883.06 | 1078.93 | 19,621.12 | 13,056.76 | 745.6667 | 5449.769 | 9178.908 | 36,332.13 | 3066.08 | 9469.057 |
| best | 655.7759 | 14,643.47 | 1348.811 | 72,405.03 | 1013.777 | 14,895.87 | 10,390.22 | 702.4754 | 3735.491 | 6841.936 | 25,952.88 | 2030.326 | 9196.622 | |
| worst | 793.6724 | 21,181.19 | 1785.136 | 89,013.13 | 1187.742 | 28,200.33 | 14,,767.67 | 773.1848 | 7492.231 | 10,520.72 | 45,851.15 | 4909.819 | 9906.689 | |
| std | 60.21498 | 3087.898 | 197.5832 | 6886.744 | 75.37681 | 6081.237 | 1906.107 | 31.28424 | 1791.353 | 1681.483 | 8202.682 | 1313.62 | 306.1485 | |
| median | 690.96 | 20,368.84 | 1664.122 | 79,057.04 | 1057.1 | 17,694.15 | 13,534.58 | 753.5032 | 5285.676 | 9676.486 | 36,762.24 | 2662.088 | 9386.458 | |
| rank | 1 | 10 | 4 | 13 | 3 | 11 | 9 | 2 | 6 | 7 | 12 | 5 | 8 | |
| C17-F5 | mean | 1140.386 | 1416.959 | 1337.534 | 2014.712 | 1240.094 | 2115.385 | 1999.848 | 1237.633 | 1155.592 | 1860.505 | 1347.479 | 1399.646 | 1716.961 |
| best | 1078.186 | 1389.332 | 1325.12 | 1977.422 | 1195.626 | 2036.245 | 1909.846 | 1113.65 | 1084.952 | 1792.429 | 1271.784 | 1348.014 | 1657.313 | |
| worst | 1174.568 | 1466.582 | 1347.384 | 2051.417 | 1308.247 | 2283.080 | 2096.681 | 1333.125 | 1222.116 | 1994.053 | 1469.717 | 1467.549 | 1744.248 | |
| std | 42.78946 | 34.79746 | 9.317251 | 37.35075 | 49.91629 | 113 | 76.57659 | 97.18324 | 56.28314 | 90.68752 | 86.24644 | 53.25039 | 40.1947 | |
| median | 1154.395 | 1405.962 | 1338.816 | 2015.004 | 1228.252 | 2071.107 | 1996.433 | 1251.878 | 1157.651 | 1827.769 | 1324.208 | 1391.51 | 1733.142 | |
| rank | 1 | 8 | 5 | 12 | 4 | 13 | 11 | 3 | 2 | 10 | 6 | 7 | 9 | |
| C17-F6 | mean | 640.8564 | 671.2647 | 664.0195 | 708.4028 | 635.4878 | 720.0932 | 702.7487 | 677.6025 | 641.7199 | 687.1312 | 668.1679 | 665.195 | 667.7512 |
| best | 638.4984 | 665.4193 | 659.8006 | 703.2776 | 632.7878 | 708.063 | 692.7168 | 661.6266 | 636.6993 | 680.3454 | 666.4344 | 661.4675 | 662.3638 | |
| worst | 645.8414 | 687.6795 | 668.4418 | 711.4416 | 640.1923 | 730.9568 | 716.0015 | 693.8966 | 645.3746 | 696.9215 | 669.6235 | 670.454 | 674.3769 | |
| std | 3.412407 | 10.94671 | 3.561852 | 3.608402 | 3.400557 | 10.07273 | 10.16945 | 13.63377 | 3.924944 | 7.304814 | 1.69535 | 4.126496 | 5.003959 | |
| median | 639.5429 | 665.98 | 663.9178 | 709.446 | 634.4854 | 720.6764 | 701.1382 | 677.4434 | 642.4029 | 685.629 | 668.3068 | 664.4292 | 667.132 | |
| rank | 2 | 8 | 4 | 12 | 1 | 13 | 11 | 9 | 3 | 10 | 7 | 5 | 6 | |
| C17-F7 | mean | 1893.552 | 3374.351 | 3157.709 | 3828.487 | 2006.673 | 3664.688 | 3488.485 | 2248.066 | 2145.731 | 2970.465 | 2998.831 | 2589.66 | 2744.412 |
| best | 1757.932 | 3209.741 | 2991.056 | 3733.397 | 1831.281 | 3130.538 | 3237.059 | 2030.148 | 2005.574 | 2855.161 | 2786.07 | 2157.752 | 2606.048 | |
| worst | 2019.125 | 3753.746 | 3297.533 | 3909.372 | 2119.133 | 4341.917 | 3644.585 | 2476.499 | 2342.976 | 3102.649 | 3161.247 | 2829.485 | 2825.746 | |
| std | 114.7911 | 257.1896 | 153.159 | 75.52237 | 124.2497 | 501.5494 | 182.1772 | 189.4768 | 147.1537 | 121.8524 | 178.6652 | 315.2845 | 100.1396 | |
| median | 1898.576 | 3266.959 | 3171.124 | 3835.589 | 2038.139 | 3593.148 | 3536.148 | 2242.807 | 2117.187 | 2962.026 | 3024.004 | 2685.703 | 2772.926 | |
| rank | 1 | 10 | 9 | 13 | 2 | 12 | 11 | 4 | 3 | 7 | 8 | 5 | 6 | |
| C17-F8 | mean | 1431.669 | 1802.604 | 1766.254 | 2528.82 | 1483.671 | 2517.501 | 2210.127 | 1482.502 | 1540.977 | 2240.139 | 1883.447 | 1919.521 | 2069.916 |
| best | 1288.825 | 1707.765 | 1707.542 | 2502.557 | 1317.806 | 2416.13 | 2128.762 | 1356.216 | 1467.944 | 2124.134 | 1857.322 | 1747.085 | 2014.745 | |
| worst | 1505.145 | 1846.735 | 1795.721 | 2544.961 | 1637.492 | 2615.076 | 2313.552 | 1578.711 | 1603.175 | 2340.597 | 1932.538 | 2074.104 | 2101.56 | |
| std | 97.56967 | 63.86616 | 40.49818 | 18.33389 | 131.5389 | 83.6966 | 79.91965 | 97.93548 | 56.07926 | 95.53038 | 35.38708 | 164.7306 | 39.18582 | |
| median | 1466.353 | 1827.959 | 1780.877 | 2533.881 | 1489.693 | 2519.399 | 2199.096 | 1497.541 | 1546.395 | 2247.912 | 1871.965 | 1928.448 | 2081.68 | |
| rank | 1 | 6 | 5 | 13 | 3 | 12 | 10 | 2 | 4 | 11 | 7 | 8 | 9 | |
| C17-F9 | mean | 19,364.46 | 82,669.58 | 27,172.11 | 79,373.17 | 22,818.43 | 137,756.3 | 59,269.65 | 68,461.86 | 45,236.99 | 69,329.59 | 26,731.7 | 30,740.75 | 48,051.43 |
| best | 16,807.53 | 75,191.45 | 22,605.98 | 76,723.33 | 17,418.05 | 108,475.1 | 45,027.85 | 49,383.76 | 33,072.81 | 65,899.36 | 24,236.3 | 25,972.61 | 45,151.63 | |
| worst | 21,107.66 | 91,644.35 | 30,594.59 | 81,543.18 | 25,883.72 | 152,399.4 | 83,531.69 | 94,754.6 | 54,921.68 | 73,999.44 | 30,955.57 | 36,306.87 | 53,358.57 | |
| std | 2103.88 | 7174.092 | 3328.994 | 2100.287 | 3868.815 | 19,968.74 | 17,085.29 | 19,622.14 | 9095.293 | 3435.528 | 2919.456 | 5374.775 | 3799.396 | |
| median | 19,771.33 | 81,921.27 | 27,743.93 | 79,613.09 | 23,985.98 | 145,075.3 | 54,259.52 | 64,854.53 | 46,476.73 | 68,709.78 | 25,867.47 | 30,341.75 | 46,847.75 | |
| rank | 1 | 12 | 4 | 11 | 2 | 13 | 8 | 9 | 6 | 10 | 3 | 5 | 7 | |
| C17-F10 | mean | 12,718.41 | 25,000.53 | 16,130.00 | 32,371.07 | 14,957.25 | 29,288.9 | 27,809.40 | 16,429.39 | 20,918.75 | 32,258.28 | 16,555.1 | 17,941.46 | 26,975.78 |
| best | 12,215.97 | 17,070.00 | 13,311.48 | 31,423.28 | 13,758.01 | 28,082.1 | 25,632.71 | 12,929.29 | 16,553.94 | 31,909.45 | 15,209.4 | 16,127.12 | 26,382.45 | |
| worst | 13,595.73 | 31,663.57 | 18,484.04 | 32,801.76 | 15,544.55 | 30,431.1 | 29,064.27 | 20,010.88 | 32,186.21 | 32,592.30 | 17,295.4 | 20,010.14 | 27,903.87 | |
| std | 603.51 | 7406.58 | 2244.45 | 647.84 | 825.34 | 969.3 | 1538.77 | 2909.97 | 7526.20 | 360.10 | 923.7 | 1735.06 | 702.90 | |
| median | 12,530.97 | 25,634.28 | 16,362.23 | 32,629.62 | 15,263.23 | 29,321.1 | 28,270.31 | 16,388.69 | 17,467.43 | 32,265.69 | 16,857.76 | 17,814.29 | 26,808.41 | |
| rank | 1 | 8 | 3 | 13 | 2 | 11 | 10 | 4 | 7 | 12 | 5 | 6 | 9 | |
| C17-F11 | mean | 2576.639 | 66,539.98 | 66,864.48 | 215,441.7 | 4466.554 | 74,278.42 | 233,670.5 | 5121.713 | 73,277.27 | 54,827.31 | 182,410.7 | 80,069.76 | 163,604.5 |
| best | 2351.245 | 48,807.46 | 60,071.57 | 164,806.4 | 3731.435 | 57,060.97 | 147,832.1 | 4503.97 | 59,898.28 | 49,308.24 | 150,790.3 | 50,850.22 | 122,067.2 | |
| worst | 2838.85 | 92,451.67 | 79,917.87 | 307,014.4 | 5502.63 | 83,711.11 | 404,045.3 | 6212.619 | 87,020.96 | 63,160.31 | 215,076.3 | 97,950.76 | 207,411.1 | |
| std | 224.0385 | 19,508.04 | 9184.966 | 64,071.68 | 763.2635 | 11,773.96 | 115,695.8 | 775.776 | 11,363.38 | 5914.53 | 27,214.48 | 22,176.82 | 41,642.89 | |
| median | 2558.232 | 62450.4 | 63,734.24 | 194,972.9 | 4316.076 | 78,170.81 | 191,402.3 | 4885.131 | 73,094.91 | 53,420.35 | 181,888.2 | 85,739.03 | 162,469.8 | |
| rank | 1 | 5 | 6 | 12 | 2 | 8 | 13 | 3 | 7 | 4 | 11 | 9 | 10 | |
| C17-F12 | mean | 21,615,544 | 5.33 × 1010 | 6.87 × 108 | 1.79 × 1011 | 2.66 × 108 | 6.03 × 1010 | 1.25 × 1010 | 5.51 × 108 | 1.78 × 1010 | 2.51 × 1010 | 6.17 × 1010 | 7.41 × 109 | 1.34 × 1010 |
| best | 10,630,715 | 4.58 × 1010 | 3.65 ×108 | 1.34 × 1011 | 1.03 × 108 | 4.46 × 1010 | 9.28 × 109 | 2.54 × 108 | 1.19 × 1010 | 1.69 × 1010 | 4.86 × 1010 | 2.54 × 109 | 1.17 × 1010 | |
| worst | 32,253,244 | 6.1 × 1010 | 1.1 × 109 | 2.08 × 1011 | 3.55 × 108 | 8.39 × 1010 | 1.46 × 1010 | 9.23 × 108 | 3.18 × 1010 | 3.8 × 1010 | 6.66 × 1010 | 1.75 × 1010 | 1.58 × 1010 | |
| std | 9525,992 | 6.22 × 109 | 3.16 × 108 | 3.4 × 1010 | 1.13 × 108 | 1.72 × 1010 | 2.28 × 109 | 2.95 × 108 | 9.38 × 109 | 9.05 × 109 | 8.78 × 109 | 6.81 × 109 | 2.01 × 109 | |
| median | 21,789,109 | 5.33 × 1010 | 6.44 × 108 | 1.87 × 1011 | 3.04 × 108 | 5.64 × 1010 | 1.31 × 1010 | 5.13 × 108 | 1.38 × 1010 | 2.28 × 1010 | 6.59 × 1010 | 4.8 × 109 | 1.3 × 1010 | |
| rank | 1 | 10 | 4 | 13 | 2 | 11 | 6 | 3 | 8 | 9 | 12 | 5 | 7 | |
| C17-F13 | mean | 44,203.5 | 7.73 × 109 | 102,552.1 | 4.46 × 1010 | 70,549.51 | 2.06 × 1010 | 8.69 × 108 | 440,253.3 | 1.66 × 109 | 4.43 × 109 | 9.98 × 109 | 1.63 × 108 | 1.74 × 108 |
| best | 39,417.16 | 2.91 × 109 | 72,417.29 | 3.45 × 1010 | 39,047.23 | 1.37 × 1010 | 4.27 × 108 | 385,351.8 | 3490,814 | 1.73 × 109 | 8.96 × 109 | 63,314.68 | 61,879,640 | |
| worst | 47,640.75 | 1.2 × 1010 | 139,843.7 | 5.05 × 1010 | 89,174.52 | 3.1 × 1010 | 1.71 × 109 | 549,081.5 | 5.13 × 109 | 7.98 × 109 | 1.11 × 1010 | 5.76 × 108 | 2.79 × 108 | |
| std | 3447.109 | 4.32 × 109 | 28,590.46 | 7.42 × 109 | 23,479.33 | 7.5 × 109 | 5.8 × 108 | 73,870.14 | 2.35 × 109 | 2.61 × 109 | 9.87 × 108 | 2.76 × 108 | 92177490 | |
| median | 44,878.03 | 8.02 × 109 | 98,973.74 | 4.67 × 1010 | 76,988.15 | 1.88 × 1010 | 6.72 × 108 | 413,289.9 | 7.45 × 108 | 4.01 × 109 | 9.92 × 109 | 38354572 | 1.78 × 108 | |
| rank | 1 | 10 | 3 | 13 | 2 | 12 | 7 | 4 | 8 | 9 | 11 | 5 | 6 | |
| C17-F14 | mean | 38,247.02 | 8,398,313 | 6,983,904 | 83,370,942 | 37,992.77 | 7574,523 | 23,051,859 | 2,406,385 | 7,632,300 | 12,005,340 | 8,966,839 | 3,232,258 | 16,151,979 |
| best | 19,691.01 | 5,689,698 | 4,235,073 | 76,038,636 | 19,526.17 | 3959,310 | 16,617,918 | 1,206,786 | 4,435,632 | 8,814,373 | 6,670,450 | 720,653 | 10,615,559 | |
| worst | 70,208.67 | 11,219,705 | 11,593,673 | 91,264,970 | 69,787.65 | 15,774,376 | 35,953,797 | 4,757,866 | 13,293,148 | 15,067,242 | 14,374,476 | 7,262,728 | 21,599,852 | |
| std | 22,041.78 | 2,526,169 | 3,241,606 | 7,314,111 | 21,928.96 | 5,505,061 | 8787,473 | 1,618,096 | 3,949,408 | 2,628,175 | 3,652,301 | 2,811,928 | 4561,649 | |
| median | 31,544.2 | 8,341,924 | 6,053,435 | 83,090,081 | 31,328.63 | 5,282,204 | 19,817,861 | 1,830,443 | 6,400,211 | 12,069,874 | 7,411,215 | 2,472,826 | 16,196,252 | |
| rank | 2 | 8 | 5 | 13 | 1 | 6 | 12 | 3 | 7 | 10 | 9 | 4 | 11 | |
| C17-F15 | mean | 33,097.94 | 4.19 × 108 | 88,181.73 | 2.46 × 1010 | 34,635.7 | 1.03 × 1010 | 1.95 × 108 | 145,183.4 | 2.72 × 108 | 7.94 × 108 | 1.72 × 109 | 1.18 × 109 | 9,645,827 |
| best | 16,382.21 | 23,910,679 | 72,089.62 | 1.76 × 1010 | 17,471.38 | 6.25 × 109 | 69,888,989 | 80,674.01 | 1.24 × 108 | 4.89 × 108 | 5.36 × 108 | 58117.71 | 6,699,332 | |
| worst | 44,575.1 | 1.22 × 109 | 110,726.8 | 3.07 × 1010 | 48,568.52 | 1.53 × 1010 | 4.94 × 108 | 208,724.2 | 5.69 × 108 | 1.14 × 109 | 4.14 × 109 | 2.91 × 109 | 12,373,368 | |
| std | 13,525.92 | 5.44 × 108 | 18,472.61 | 6.5 × 109 | 14,309.74 | 3.92 × 109 | 2.01 × 108 | 53,444.25 | 2.01 × 108 | 2.9 × 108 | 1.64 × 109 | 1.44 × 109 | 2,319,862 | |
| median | 35,717.23 | 2.16 × 108 | 84,955.27 | 2.51 × 1010 | 36,251.46 | 9.75 × 109 | 1.07 × 108 | 145,667.7 | 1.98 × 108 | 7.73 × 108 | 1.11 × 109 | 9.01 × 108 | 9,755,304 | |
| rank | 1 | 8 | 3 | 13 | 2 | 12 | 6 | 4 | 7 | 9 | 11 | 10 | 5 | |
| C17-F16 | mean | 5289.667 | 8075.619 | 7346.94 | 23,585.12 | 5556.754 | 12,659.13 | 16,572.81 | 6401.656 | 6685.502 | 12,217.08 | 10,417.54 | 6132.963 | 11,108.18 |
| best | 4897.6 | 7396.592 | 6037.364 | 18,423.11 | 4859.187 | 11,295.55 | 13,966.61 | 5961.599 | 6185.134 | 10,721.76 | 9217.053 | 5449.275 | 9424.787 | |
| worst | 5710.276 | 8970.729 | 8134.842 | 26,458.22 | 6867.361 | 14,021.14 | 18,721.12 | 6668.897 | 7453.341 | 13,860.22 | 11,540.53 | 6832.967 | 11,940.21 | |
| std | 332.3395 | 704.2064 | 923.0135 | 3635.585 | 892.9725 | 1121.277 | 1963.62 | 327.4517 | 604.6548 | 1289.506 | 962.7863 | 582.5351 | 1138.671 | |
| median | 5275.395 | 7967.578 | 7607.778 | 24,729.57 | 5250.235 | 12,659.92 | 16,801.76 | 6488.063 | 6551.766 | 12,143.17 | 10,456.29 | 6124.805 | 11,533.86 | |
| rank | 1 | 7 | 6 | 13 | 2 | 11 | 12 | 4 | 5 | 10 | 8 | 3 | 9 | |
| C17-F17 | mean | 4400.558 | 10,409.14 | 5990.338 | 8,696,852 | 4366.873 | 151,808.6 | 15,333.77 | 5168.306 | 5408.623 | 9341.009 | 228,490.8 | 7064.66 | 6756.812 |
| best | 4055.441 | 5815.1 | 5796.742 | 2,357,254 | 4026.543 | 32,785.66 | 11,709.25 | 4917.866 | 4332.309 | 8097.868 | 42,794.52 | 6170.799 | 6191.594 | |
| worst | 4671.854 | 16,795.95 | 6476.642 | 20,011,852 | 4628.367 | 375,453 | 18,769.63 | 5547.375 | 6488.278 | 10,527.61 | 741,374.4 | 7828.836 | 7423.221 | |
| std | 260.7233 | 4852.693 | 326.2353 | 8,306,042 | 255.0694 | 158,483.7 | 3908.91 | 267.6024 | 896.4995 | 999.1039 | 342,134.4 | 692.6501 | 514.2877 | |
| median | 4437.468 | 9512.766 | 5843.985 | 6,209,152 | 4406.292 | 99,497.89 | 15,428.1 | 5103.992 | 5406.953 | 9369.278 | 64,897.14 | 7129.502 | 6706.217 | |
| rank | 2 | 9 | 5 | 13 | 1 | 11 | 10 | 3 | 4 | 8 | 12 | 7 | 6 | |
| C17-F18 | mean | 188,979.9 | 7,212,606 | 2,951,049 | 1.08 × 108 | 235,943.2 | 18,747,096 | 20,370,306 | 3,891,643 | 9,340,657 | 20,568,868 | 8,970,756 | 2,463,637 | 7,316,713 |
| best | 168,960.2 | 2,281,779 | 1,467,407 | 41,911,753 | 178,664.2 | 9,857,550 | 12,477,291 | 2,117,331 | 2,729,394 | 12,444,228 | 4,277,344 | 834,378.1 | 5,157,171 | |
| worst | 217,287.5 | 14,425,982 | 4,665,842 | 1.97 × 108 | 379,813 | 28,848,858 | 31,924,135 | 7,854,026 | 15,928,695 | 38,379,799 | 11,074,720 | 3,768,395 | 10,061,294 | |
| std | 22,970 | 5,140,198 | 1,449,149 | 65,562,281 | 96,626.92 | 7,801,882 | 8256,895 | 2,663,425 | 5,635,043 | 12,131,498 | 3,152,116 | 1,271,998 | 2,343,646 | |
| median | 184,836 | 6071,331 | 2,835,474 | 96,283,852 | 192,647.90 | 18,140,988 | 18,539,900 | 2,797,608 | 9,352,270 | 15,725,723 | 10,265,479 | 2,625,888 | 7,024,194 | |
| rank | 1 | 6 | 4 | 13 | 2 | 10 | 11 | 5 | 9 | 12 | 8 | 3 | 7 | |
| C17-F19 | mean | 240,362.6 | 8.76 × 108 | 3,017,804 | 2.34 × 1010 | 253,780.5 | 6.88 × 109 | 1.99 × 108 | 19,860,187 | 5.05 × 108 | 9.51 × 108 | 1.38 × 109 | 5.71 × 108 | 15,651,499 |
| best | 106,471.1 | 33,323,526 | 1,155,276 | 1.71 × 1010 | 112,995.9 | 6.17 × 109 | 73469347 | 6,784,792 | 13,099,458 | 4.24 × 108 | 5.24 × 108 | 1420743 | 5,304,591 | |
| worst | 317,561.9 | 2.12 × 109 | 5,555,441 | 2.92 × 1010 | 335,639.9 | 8.01 × 109 | 3.14 × 108 | 31,723,596 | 1.91 × 109 | 1.98 × 109 | 2.57 × 109 | 1.49 × 109 | 35,863,459 | |
| std | 92,219.0 | 9.6 × 108 | 1,859,799 | 4.98 × 109 | 97,113.3 | 8.03 × 108 | 1.01 × 108 | 10,221,012 | 9.38 × 108 | 6.96 × 108 | 9.4 × 108 | 6.8 × 108 | 14,375,122 | |
| median | 268,708.6 | 6.73 × 108 | 2,680,249 | 2.37 × 1010 | 283,243.1 | 6.67 × 109 | 2.05 × 108 | 20,466,180 | 48,052,465 | 7.03 × 108 | 1.22 × 109 | 3.96 × 108 | 10,718,973 | |
| rank | 1 | 9 | 3 | 13 | 2 | 12 | 6 | 5 | 7 | 10 | 11 | 8 | 4 | |
| C17-F20 | mean | 4329.037 | 5209.792 | 6336.396 | 7771.453 | 4716.199 | 7113.265 | 6925.121 | 5395.872 | 4996.863 | 7387.463 | 5974.363 | 5170.578 | 6642.64 |
| best | 3983.977 | 4821.265 | 5904.681 | 7612.301 | 4388.633 | 6767.715 | 6587.829 | 5094.733 | 4850.608 | 7234.322 | 5242.187 | 4710.582 | 6076.979 | |
| worst | 4539.248 | 5659.555 | 6676.751 | 7841.025 | 4978.188 | 7576.378 | 7332.808 | 5543.659 | 5163.653 | 7497.733 | 6314.946 | 5782.027 | 7037.92 | |
| std | 240.729 | 355.8995 | 343.9901 | 106.793 | 252.3931 | 386.9691 | 368.0945 | 203.5619 | 148.5221 | 125.1266 | 496.6382 | 474.2739 | 420.3355 | |
| median | 4396.461 | 5179.175 | 6382.075 | 7816.242 | 4748.988 | 7054.484 | 6889.924 | 5472.548 | 4986.596 | 7408.899 | 6170.159 | 5094.852 | 6727.831 | |
| rank | 1 | 5 | 8 | 13 | 2 | 11 | 10 | 6 | 3 | 12 | 7 | 4 | 9 | |
| C17-F21 | mean | 2736.167 | 3745.407 | 3729.792 | 4508.594 | 2838.871 | 4334.393 | 4315.533 | 3017.185 | 3055.55 | 3655.302 | 4547.086 | 3650.019 | 3629.856 |
| best | 2679.86 | 3690.774 | 3506.549 | 4427.007 | 2768.495 | 4120.796 | 3872.558 | 2972.154 | 2900.463 | 3567.526 | 4387.706 | 3423.076 | 3557.698 | |
| worst | 2813.182 | 3796.665 | 3875.17 | 4568.519 | 2890.906 | 4510.86 | 4750.77 | 3054.39 | 3136.03 | 3719.88 | 4719.22 | 3851.77 | 3712.51 | |
| std | 58.0787 | 43.77476 | 159.0511 | 61.58535 | 58.50085 | 166.9908 | 385.4136 | 35.2477 | 105.7954 | 70.19626 | 135.5839 | 178.1641 | 71.99652 | |
| median | 2725.81 | 3747.09 | 3768.73 | 4519.43 | 2848.04 | 4352.96 | 4319.40 | 3021.10 | 3092.85 | 3666.90 | 4540.71 | 3662.61 | 3624.61 | |
| rank | 1 | 9 | 8 | 12 | 2 | 11 | 10 | 3 | 4 | 7 | 13 | 6 | 5 | |
| C17-F22 | mean | 16,754.43 | 22,635.78 | 20,677.34 | 34,479.41 | 19,077.25 | 32,106.98 | 30,302.25 | 19,243.96 | 18,528.36 | 34,487.37 | 20,703.73 | 20,184.32 | 29,011.38 |
| best | 15,651.14 | 21,193.53 | 19,202.46 | 34,027.03 | 18,107.02 | 29,368.93 | 29,139.08 | 17,859.86 | 17,156.79 | 33,489 | 19,451.88 | 17,961.85 | 28,178.06 | |
| worst | 17,268.55 | 23,665.76 | 22,710.46 | 35,121.42 | 20,362.55 | 33,216.89 | 31,342.78 | 20,447.75 | 19,437 | 35,320.04 | 21,879.51 | 21,096.56 | 30,184.34 | |
| std | 754.6418 | 1037.438 | 1555.121 | 491.9479 | 953.8498 | 1830.945 | 1029.101 | 1331.092 | 1001.715 | 894.5323 | 1039.709 | 1497.787 | 894.7833 | |
| median | 17,049.01 | 22,841.92 | 20,398.22 | 34,384.6 | 18,919.72 | 32,921.05 | 30,363.58 | 19,334.13 | 18,759.82 | 34,570.22 | 20,741.76 | 20,839.44 | 28,841.56 | |
| rank | 1 | 8 | 6 | 12 | 3 | 11 | 10 | 4 | 2 | 13 | 7 | 5 | 9 | |
| C17-F23 | mean | 3330.207 | 5009.335 | 4180.505 | 5475.558 | 3302.335 | 5508.514 | 5381.020 | 3553.843 | 3630.727 | 4364.402 | 7806.769 | 5035.024 | 4491.184 |
| best | 3220.897 | 4915.96 | 4094.759 | 5190.584 | 3192.09 | 5331.809 | 5167.214 | 3462.843 | 3529.972 | 4221.49 | 7299.394 | 4779.893 | 4285.936 | |
| worst | 3407.188 | 5150.114 | 4271.186 | 5700.211 | 3376.761 | 5801.627 | 5828.837 | 3670.808 | 3713.651 | 4491.014 | 8053.976 | 5209.153 | 4806.089 | |
| std | 84.12463 | 101.5099 | 83.55801 | 210.9503 | 83.8719 | 203.2764 | 302.6356 | 90.02939 | 75.82554 | 126.8273 | 353.6352 | 191.2664 | 233.4911 | |
| median | 3346.372 | 4985.632 | 4178.037 | 5505.718 | 3320.244 | 5450.31 | 5264.014 | 3540.861 | 3639.643 | 4372.552 | 7936.852 | 5075.525 | 4436.355 | |
| rank | 2 | 8 | 5 | 11 | 1 | 12 | 10 | 3 | 4 | 6 | 13 | 9 | 7 | |
| C17-F24 | mean | 3838.394 | 6619.833 | 5501.153 | 10,952.73 | 4019.698 | 7130.901 | 6669.652 | 4156.191 | 4463.04 | 4946.4 | 10,577.72 | 6083.567 | 5573.038 |
| best | 3804.994 | 6393.899 | 5264.016 | 7257.544 | 3965.063 | 6181.58 | 5802.949 | 3992.141 | 4329.01 | 4779.776 | 10,344.84 | 6038.202 | 5498.956 | |
| worst | 3880.947 | 6956.558 | 5697.902 | 13,415.8 | 4076.189 | 7864.329 | 7222.435 | 4387.281 | 4672.438 | 5127.243 | 10,849.330 | 6123.814 | 5654.398 | |
| std | 33.5964 | 240.8529 | 193.1216 | 2980.522 | 55.04538 | 703.9283 | 626.4185 | 170.6274 | 146.9678 | 153.8419 | 268.4815 | 40.94055 | 69.16896 | |
| median | 3833.817 | 6564.438 | 5521.346 | 11,568.79 | 4018.771 | 7238.848 | 6826.611 | 4122.67 | 4425.356 | 4939.289 | 10,558.35 | 6086.125 | 5569.398 | |
| rank | 1 | 9 | 6 | 13 | 2 | 11 | 10 | 3 | 4 | 5 | 12 | 8 | 7 | |
| C17-F25 | mean | 3419.878 | 12,914.68 | 4200.03 | 22,463.79 | 3727.179 | 10,109.35 | 7602.511 | 3458.415 | 6612.48 | 9840.617 | 13,003.17 | 6315.64 | 8226.567 |
| best | 3270.776 | 10,959.75 | 3793.055 | 20,802.69 | 3639.544 | 7389.433 | 7500.673 | 3391.467 | 5802.505 | 7855.257 | 11,232.45 | 5406.982 | 7683.57 | |
| worst | 3570.643 | 15,484.74 | 4584.833 | 26,151.87 | 3817.394 | 12,792.82 | 7828.874 | 3519.4 | 7077.109 | 13,190.3 | 14,733.21 | 7810.14 | 8659.75 | |
| std | 127.2128 | 2106.496 | 327.3314 | 2514.302 | 84.07639 | 2611.297 | 152.0693 | 67.05617 | 559.221 | 2384.22 | 1600.964 | 1069.279 | 439.551 | |
| median | 3419.046 | 12,607.12 | 4211.116 | 21,450.29 | 3725.889 | 10,127.58 | 7540.248 | 3461.397 | 6785.152 | 9158.458 | 13,023.5 | 6022.719 | 8281.474 | |
| rank | 1 | 11 | 4 | 13 | 3 | 10 | 7 | 2 | 6 | 9 | 12 | 5 | 8 | |
| C17-F26 | mean | 12,161.53 | 33,589.15 | 25,812.52 | 47,915.4 | 12,417.5 | 36,882.86 | 39,697.02 | 13,011.43 | 16,796.16 | 26,337.9 | 36,037.68 | 26,179.06 | 23,813.48 |
| best | 11,570.58 | 32,040.89 | 22,771.24 | 45,204.13 | 12,010.75 | 34,702.39 | 36,284.73 | 12,173.32 | 16,104.17 | 23,268.42 | 34,617.49 | 23,436.07 | 18,794.69 | |
| worst | 13,140.16 | 35,062.47 | 28,918.45 | 49,592 | 13,166.37 | 39,236.38 | 46,080.27 | 14,038 | 18,257.86 | 31,568.31 | 38,296.26 | 29,012.3 | 30,130.64 | |
| std | 714.7895 | 1291.344 | 2627.91 | 2110.57 | 517.0592 | 2305.593 | 4571.018 | 774.4961 | 986.1479 | 3755.775 | 1584.211 | 2288.35 | 5129.716 | |
| median | 11,967.7 | 33,626.62 | 25,780.19 | 48,432.75 | 12,246.44 | 36,796.33 | 38,211.53 | 12,917.19 | 16,411.3 | 25,257.43 | 35,618.49 | 26,133.95 | 23,164.3 | |
| rank | 1 | 9 | 6 | 13 | 2 | 11 | 12 | 3 | 4 | 8 | 10 | 7 | 5 | |
| C17-F27 | mean | 3573.983 | 7203.719 | 4220.107 | 12,874.15 | 3543.702 | 6590.686 | 5549.819 | 3636.355 | 4351.534 | 4365.099 | 14,390.47 | 4068.458 | 5427.951 |
| best | 3550.019 | 6374.999 | 4035.689 | 9574.128 | 3515.753 | 5450.785 | 5255.732 | 3538.111 | 4047.274 | 4231.086 | 12,460.66 | 3698.791 | 5163.581 | |
| worst | 3617.97 | 8029.224 | 4525.976 | 16,299.41 | 3586.981 | 7337.146 | 6286.109 | 3743.107 | 4728.147 | 4538.464 | 16,773.18 | 4534.344 | 5728.043 | |
| std | 30.36471 | 874.2169 | 212.0854 | 3625.498 | 30.41211 | 825.7145 | 492.4035 | 87.09758 | 298.1583 | 144.9164 | 1847.757 | 369.1118 | 238.5253 | |
| median | 3563.971 | 7205.326 | 4159.381 | 12,811.52 | 3536.036 | 6787.406 | 5328.717 | 3632.1 | 4315.358 | 4345.422 | 14,164.01 | 4020.349 | 5410.089 | |
| rank | 2 | 11 | 5 | 12 | 1 | 10 | 9 | 3 | 6 | 7 | 13 | 4 | 8 | |
| C17-F28 | mean | 3582.808 | 16,810.98 | 4799.097 | 29,879.23 | 3850.162 | 16,533.6 | 11,426.62 | 3532.959 | 10765.53 | 11,980.69 | 17,423.16 | 6348.414 | 13,091.11 |
| best | 3420.284 | 15,333.26 | 4474.553 | 26,738.46 | 3777.292 | 14,884.29 | 9122.899 | 3454.509 | 8221.553 | 9544.848 | 15,852.57 | 4956.941 | 12,054.66 | |
| worst | 3659.831 | 18,085.58 | 5038.336 | 33,810.2 | 3972.019 | 18,597.99 | 13,140.11 | 3636.308 | 14,812.54 | 14,940.48 | 19,363.45 | 7865.142 | 14,211.12 | |
| std | 110.8076 | 1313.643 | 238.6427 | 2965.76 | 86.65758 | 1651.567 | 1959.457 | 75.76293 | 2827.535 | 2230.037 | 1666.674 | 1328.374 | 1159.838 | |
| median | 3625.557 | 16,912.53 | 4841.749 | 29,484.12 | 3825.668 | 16,326.07 | 11,721.74 | 3520.51 | 10,014.01 | 11,718.71 | 17,238.3 | 6285.787 | 13,049.32 | |
| rank | 2 | 11 | 4 | 13 | 3 | 10 | 7 | 1 | 6 | 8 | 12 | 5 | 9 | |
| C17-F29 | mean | 6785.358 | 11,200.52 | 9945.999 | 371,294.3 | 7011.439 | 29,447.41 | 16,930.69 | 8701.23 | 8650.05 | 14,358.73 | 21,205.48 | 8372.447 | 12,438.74 |
| best | 6237.576 | 10,204.3 | 8591.844 | 199,089.7 | 6512.523 | 15,174.79 | 13,802.42 | 7941.767 | 7491.625 | 13,504.12 | 16,011.96 | 7665.661 | 12,035.03 | |
| worst | 7296.052 | 11,863.42 | 10,788.87 | 515,537.6 | 7399.818 | 66,248.24 | 21,278.25 | 9252.116 | 10,249.87 | 15,398.75 | 24,203.99 | 8683.496 | 13,143.18 | |
| std | 489.398 | 754.6761 | 947.033 | 134,866.2 | 422.6678 | 24,574.85 | 3132.304 | 552.0585 | 1345.612 | 871.218 | 3595.977 | 482.8703 | 485.136 | |
| median | 6803.901 | 11,367.19 | 10,201.64 | 385,275.00 | 7066.708 | 18,183.31 | 16,321.06 | 8805.519 | 8429.351 | 14,266.02 | 22,302.99 | 8570.316 | 12,288.36 | |
| rank | 1 | 7 | 6 | 13 | 2 | 12 | 10 | 5 | 4 | 9 | 11 | 3 | 8 | |
| C17-F30 | mean | 5,554,314 | 2.47 × 109 | 29,428,850 | 4 × 1010 | 6,188,795 | 1.46 × 1010 | 1.17 × 109 | 1.19 × 108 | 2.32 × 109 | 3.05 × 109 | 1.18 × 1010 | 3.93 × 108 | 6.24 × 108 |
| best | 2,780,134 | 1.38 × 108 | 16,769,683 | 3.74 × 1010 | 2,886,968 | 1.32 × 1010 | 8.85 × 108 | 85,223,927 | 5.3 × 108 | 1.18 × 109 | 8.16 × 109 | 7358589 | 4.39 × 108 | |
| worst | 7,910,687 | 6.19 × 109 | 51,751,386 | 4.33 × 1010 | 8,330,799 | 1.64 × 1010 | 1.6 × 109 | 1.65 × 108 | 5.4 × 109 | 4.23 × 109 | 1.56 × 1010 | 1.52 × 109 | 1.04 × 109 | |
| std | 2,148,328 | 2.6 × 109 | 15,661,651 | 2.53 × 109 | 2,560,052 | 1.43 × 109 | 3.08 × 108 | 34,020,142 | 2.12 × 109 | 1.31 × 109 | 3.05 × 109 | 7.51 × 108 | 2.83 × 108 | |
| median | 5,763,217 | 1.77 × 109 | 24,597,166 | 3.97 × 1010 | 6,768,707 | 1.45 × 1010 | 1.1 × 109 | 1.13 × 108 | 1.68 × 109 | 3.4 × 109 | 1.17 × 1010 | 22,288,328 | 5.08 × 108 | |
| rank | 1 | 9 | 3 | 13 | 2 | 12 | 7 | 4 | 8 | 10 | 11 | 5 | 6 | |
| Sum rank | 35 | 244 | 144 | 359 | 61 | 318 | 275 | 116 | 159 | 255 | 281 | 172 | 220 | |
| Mean rank | 1.206897 | 8.413793 | 4.965517 | 12.37931 | 2.103448 | 10.96552 | 9.482759 | 4 | 5.482759 | 8.793103 | 9.689655 | 5.931034 | 7.586207 | |
| Total rank | 1 | 8 | 4 | 13 | 2 | 12 | 10 | 3 | 5 | 9 | 11 | 6 | 7 | |
| SOA | WSO | AVOA | RSA | MPA | TSA | WOA | MVO | GWO | TLBO | GSA | PSO | GA | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C19-F1 | mean | 1 | 71,754.43 | 1 | 1 | 1 | 20,197.74 | 11,700,900 | 1,132,771 | 27,189.42 | 68.36027 | 6.2 × 108 | 149,550.8 | 7,917,670 |
| best | 1 | 1160.891 | 1 | 1 | 1 | 2.7537 | 2,455,600 | 376,289.6 | 1.003811 | 1.000003 | 1.49 × 108 | 14,365.34 | 2,787,375 | |
| worst | 1 | 205,465.8 | 1 | 1 | 1 | 80,619 | 16,679,000 | 2,285,093 | 94,712.58 | 270.415 | 1.07 × 109 | 475,601.4 | 16,682,079 | |
| std | 0 | 92,622.55 | 0 | 0 | 0 | 40,280.89 | 6,367,086 | 841,143.6 | 45,495.01 | 134.7032 | 4.66 × 108 | 218,241.3 | 6,534,856 | |
| median | 1 | 40,195.5 | 1 | 1 | 1 | 84.6 | 13,834,500 | 934,851.2 | 7022.04 | 1.013028 | 6.33 × 108 | 54,118.3 | 6,100,613 | |
| rank | 1 | 5 | 1 | 1 | 1 | 3 | 9 | 7 | 4 | 2 | 10 | 6 | 8 | |
| C19-F2 | mean | 3.1203 | 172.9367 | 4.694109 | 5 | 3.569175 | 800.59 | 6139.5 | 563.8434 | 454.4571 | 667.1054 | 27,745.11 | 363.9978 | 857.5801 |
| best | 2.607813 | 98.73351 | 4.303868 | 5 | 2.798006 | 629.09 | 2908 | 286.6219 | 210.5741 | 5.564019 | 9851.265 | 226.8182 | 577.9538 | |
| worst | 3.596576 | 266.8291 | 5 | 5 | 4.344219 | 937.15 | 9275.1 | 838.1335 | 658.0928 | 1190.362 | 42,469.39 | 544.8626 | 1135.415 | |
| std | 0.409111 | 70.34908 | 0.359864 | 5.13 × 10−16 | 0.631625 | 136.5541 | 2632.46 | 227.506 | 184.6327 | 537.804 | 14,988.08 | 133.4324 | 290.0151 | |
| median | 3.138405 | 163.0922 | 4.736285 | 5 | 3.567238 | 818.06 | 6187.45 | 565.309 | 474.5807 | 736.2478 | 29,329.9 | 342.1552 | 858.4759 | |
| rank | 1 | 5 | 3 | 4 | 2 | 10 | 12 | 8 | 7 | 9 | 13 | 6 | 11 | |
| C19-F3 | mean | 1.250139 | 1.892155 | 2.126998 | 8.138315 | 1.423922 | 6.45255 | 6.1394 | 8.960775 | 1.889948 | 4.716604 | 4.003168 | 3.777545 | 5.779726 |
| best | 1.045965 | 1.409789 | 1.409196 | 6.294517 | 1.196344 | 1.7408 | 3.0642 | 7.711774 | 1.141124 | 4.149536 | 2.763422 | 1.409135 | 3.599784 | |
| worst | 1.468114 | 2.377011 | 3.342791 | 9.21189 | 1.563064 | 9.7143 | 9.6473 | 10.70855 | 3.407555 | 5.801678 | 5.911327 | 7.687041 | 7.700128 | |
| std | 0.23558 | 0.555352 | 0.920308 | 1.299598 | 0.165362 | 3.397994 | 2.740517 | 1.498499 | 1.026228 | 0.751039 | 1.382805 | 3.010391 | 1.849209 | |
| median | 1.243239 | 1.890909 | 1.878002 | 8.523426 | 1.46814 | 7.17755 | 5.92305 | 8.71139 | 1.505556 | 4.457601 | 3.668962 | 3.007002 | 5.909496 | |
| rank | 1 | 4 | 5 | 12 | 2 | 11 | 10 | 13 | 3 | 8 | 7 | 6 | 9 | |
| C19-F4 | mean | 8.992048 | 17.42558 | 35.32589 | 73.96348 | 11.44685 | 53.1035 | 59.77375 | 25.557 | 23.2038 | 35.43137 | 51.99142 | 18.90922 | 22.35515 |
| best | 3.019184 | 13.93534 | 8.959667 | 55.8996 | 7.9647 | 41.459 | 32.984 | 22.89004 | 10.10581 | 32.68921 | 39.80328 | 10.94959 | 19.10672 | |
| worst | 12.96868 | 21.89463 | 57.7123 | 94.37194 | 14.929 | 65.757 | 92.985 | 29.57352 | 38.80844 | 41.06531 | 60.69719 | 36.81838 | 27.48026 | |
| std | 4.53174 | 4.092737 | 20.23611 | 16.55228 | 3.493927 | 11.06971 | 26.37413 | 2.951315 | 13.70501 | 3.931349 | 9.096213 | 12.04949 | 3.586093 | |
| median | 9.990163 | 16.93617 | 37.31579 | 72.79118 | 11.44685 | 52.599 | 56.563 | 24.88222 | 21.95048 | 33.98547 | 53.73261 | 13.93446 | 21.41682 | |
| rank | 1 | 3 | 8 | 13 | 2 | 11 | 12 | 7 | 6 | 9 | 10 | 4 | 5 | |
| C19-F5 | mean | 1.050836 | 1.688348 | 1.201342 | 88.27602 | 1.034475 | 29.61225 | 2.0399 | 1.392442 | 1.595406 | 2.934297 | 1.136918 | 1.213511 | 1.725773 |
| best | 1.047471 | 1.210439 | 1.10852 | 66.19828 | 1.0074 | 13.555 | 1.6941 | 1.239289 | 1.347328 | 2.63866 | 1.066225 | 1.179585 | 1.550766 | |
| worst | 1.057175 | 2.265097 | 1.285169 | 108.9916 | 1.0616 | 62.067 | 2.3591 | 1.756175 | 1.893882 | 3.143506 | 1.205143 | 1.253634 | 1.841835 | |
| std | 0.004577 | 0.456641 | 0.07586 | 17.49218 | 0.028578 | 22.85461 | 0.279808 | 0.246618 | 0.258445 | 0.225516 | 0.070591 | 0.038228 | 0.125116 | |
| median | 1.049349 | 1.638929 | 1.205841 | 88.95708 | 1.03445 | 21.4135 | 2.0532 | 1.287153 | 1.570207 | 2.977511 | 1.138152 | 1.210412 | 1.755246 | |
| rank | 2 | 8 | 4 | 13 | 1 | 12 | 10 | 6 | 7 | 11 | 3 | 5 | 9 | |
| C19-F6 | mean | 1.074498 | 2.901374 | 7.091154 | 9.942598 | 1.192698 | 7.857175 | 10.6821 | 3.023598 | 3.494285 | 4.576521 | 4.111191 | 3.643596 | 3.227866 |
| best | 1.036486 | 1.801215 | 6.214133 | 9.456187 | 1.074 | 4.3964 | 9.3754 | 1.226604 | 1.335962 | 3.587161 | 1.139357 | 1.531474 | 2.490765 | |
| worst | 1.179165 | 3.603571 | 9.322565 | 10.7512 | 1.321624 | 10.543 | 11.969 | 4.363759 | 4.995392 | 5.230096 | 5.652704 | 6.240727 | 4.391409 | |
| std | 0.06988 | 0.794252 | 1.496419 | 0.606401 | 0.104412 | 2.598436 | 1.062426 | 1.370934 | 1.548655 | 0.722828 | 2.109974 | 1.980984 | 0.835364 | |
| median | 1.04117 | 3.100355 | 6.41396 | 9.781504 | 1.187584 | 8.24465 | 10.692 | 3.252014 | 3.822894 | 4.744412 | 4.826352 | 3.401092 | 3.014646 | |
| rank | 1 | 3 | 10 | 12 | 2 | 11 | 13 | 4 | 6 | 9 | 8 | 7 | 5 | |
| C19-F7 | mean | 246.8228 | 487.5351 | 1082.794 | 1730.98 | 302.0954 | 1406.9 | 1141.905 | 1056.615 | 1177.53 | 1175.092 | 1660.543 | 1151.383 | 707.8292 |
| best | 150.4273 | 282.8179 | 803.7554 | 1577.123 | 165.3973 | 1022 | 702.62 | 723.0297 | 1021.721 | 708.6485 | 1502.922 | 658.1489 | 490.5917 | |
| worst | 328.0506 | 758.795 | 1546.282 | 1815.608 | 451.11 | 1685.7 | 1794.3 | 1850.827 | 1376.227 | 1521.911 | 1797.54 | 1606.777 | 1093.745 | |
| std | 73.04863 | 211.9359 | 352.957 | 108.8781 | 117.496 | 279.3649 | 463.0885 | 533.2837 | 167.1757 | 370.338 | 133.3842 | 444.184 | 282.0167 | |
| median | 254.4067 | 454.2637 | 990.5686 | 1765.594 | 295.9372 | 1459.95 | 1035.35 | 826.3016 | 1156.086 | 1234.905 | 1670.856 | 1170.303 | 623.4902 | |
| rank | 1 | 3 | 6 | 13 | 2 | 11 | 7 | 5 | 10 | 9 | 12 | 8 | 4 | |
| C19-F8 | mean | 2.981774 | 3.730856 | 4.468653 | 4.818338 | 3.3539 | 4.1504 | 4.84945 | 4.059096 | 3.609261 | 4.301578 | 5.216925 | 4.608137 | 4.529276 |
| best | 2.825294 | 3.676426 | 3.927288 | 4.538189 | 3.010552 | 3.5611 | 4.607 | 3.561631 | 3.366284 | 4.055844 | 5.119708 | 4.369611 | 4.30402 | |
| worst | 3.104412 | 3.84246 | 4.89483 | 4.985393 | 3.6811 | 4.9029 | 5.082 | 4.484265 | 4.036074 | 4.870075 | 5.373209 | 4.978318 | 4.669163 | |
| std | 0.131505 | 0.07541 | 0.456051 | 0.200563 | 0.338951 | 0.562938 | 0.210516 | 0.436397 | 0.302651 | 0.381754 | 0.12212 | 0.264886 | 0.164295 | |
| median | 2.998694 | 3.702269 | 4.526247 | 4.874885 | 3.361974 | 4.0688 | 4.8544 | 4.095245 | 3.517342 | 4.140198 | 5.187391 | 4.542309 | 4.571962 | |
| rank | 1 | 4 | 8 | 11 | 2 | 6 | 12 | 5 | 3 | 7 | 13 | 10 | 9 | |
| C19-F9 | mean | 1.081897 | 1.175838 | 1.393224 | 3.105656 | 1.092347 | 1.350775 | 1.3803 | 1.176442 | 1.220459 | 1.324073 | 1.196267 | 1.193862 | 1.138063 |
| best | 1.063102 | 1.122186 | 1.078336 | 2.401267 | 1.0512 | 1.1981 | 1.1917 | 1.150186 | 1.1062 | 1.253609 | 1.078801 | 1.089627 | 1.11366 | |
| worst | 1.115502 | 1.242474 | 1.604168 | 3.684131 | 1.123 | 1.5607 | 1.6508 | 1.203633 | 1.355802 | 1.384995 | 1.315911 | 1.263166 | 1.184152 | |
| std | 0.024024 | 0.054244 | 0.22406 | 0.546042 | 0.033978 | 0.161533 | 0.21688 | 0.024786 | 0.113289 | 0.06944 | 0.11506 | 0.075043 | 0.031644 | |
| median | 1.074491 | 1.169346 | 1.445197 | 3.168613 | 1.097595 | 1.32215 | 1.33935 | 1.175974 | 1.209917 | 1.328844 | 1.195178 | 1.211327 | 1.12722 | |
| rank | 1 | 4 | 12 | 13 | 2 | 10 | 11 | 5 | 8 | 9 | 7 | 6 | 3 | |
| C19-F10 | mean | 18.03383 | 17.89517 | 21.03628 | 21.46784 | 21.00075 | 21.41375 | 21.212 | 21.02743 | 21.47564 | 21.43069 | 23.24989 | 21.03227 | 21.26732 |
| best | 6.811592 | 7.37422 | 20.97165 | 21.37514 | 21 | 21.355 | 21.047 | 21.00739 | 21.46041 | 21.39861 | 20.99799 | 20.99969 | 21.10764 | |
| worst | 22.01547 | 21.54158 | 21.17207 | 21.54733 | 21.003 | 21.538 | 21.594 | 21.04061 | 21.49669 | 21.50204 | 24.54712 | 21.12946 | 21.39193 | |
| std | 7.483952 | 7.014666 | 0.091558 | 0.070798 | 0.0015 | 0.084215 | 0.256657 | 0.014164 | 0.017614 | 0.048814 | 1.666164 | 0.064791 | 0.126423 | |
| median | 21.65414 | 21.33245 | 21.0007 | 21.47445 | 21 | 21.381 | 21.1035 | 21.03087 | 21.47273 | 21.41107 | 23.72722 | 20.99997 | 21.28486 | |
| rank | 2 | 1 | 6 | 11 | 3 | 9 | 7 | 4 | 12 | 10 | 13 | 5 | 8 | |
| Sum rank | 12 | 40 | 63 | 103 | 19 | 94 | 103 | 64 | 66 | 83 | 96 | 63 | 71 | |
| Mean rank | 1.2 | 4 | 6.3 | 10.3 | 1.9 | 9.4 | 10.3 | 6.4 | 6.6 | 8.3 | 9.6 | 6.3 | 7.1 | |
| Total rank | 1 | 3 | 4 | 11 | 2 | 9 | 11 | 5 | 6 | 8 | 10 | 4 | 7 | |
| Compared Algorithm | Types of Objective Functions | ||||
|---|---|---|---|---|---|
| CEC 2017 | CEC 2019 | ||||
| SOA vs. WSO | 1.93 × 10−15 | 2.02 × 10−21 | 2.02 × 10−21 | 1.97 × 10−21 | 2.63 × 10−7 |
| SOA vs. AVOA | 6.1 × 10−20 | 1.16 × 10−20 | 1.97 × 10−21 | 1.97 × 10−21 | 2.07 × 10−5 |
| SOA vs. RSA | 2.02 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 2.79 × 10−7 |
| SOA vs. MPA | 0.025318 | 1.36 × 10−5 | 1.86 × 10−12 | 1.74 × 10−15 | 0.000237 |
| SOA vs. TSA | 2.24 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.18 × 10−7 |
| SOA vs. WOA | 1.97 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.48 × 10−7 |
| SOA vs. MVO | 2.77 × 10−19 | 5.13 × 10−19 | 1.56 × 10−20 | 2.8 × 10−20 | 4.98 × 10−7 |
| SOA vs. GWO | 7.23 × 10−20 | 4.62 × 10−21 | 3.69 × 10−21 | 4.74 × 10−21 | 1.71 × 10−6 |
| SOA vs. TLBO | 3.78 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.97 × 10−7 |
| SOA vs. GSA | 7.23 × 10−20 | 1.97 × 10−21 | 2.73 × 10−21 | 1.97 × 10−21 | 3.57 × 10−8 |
| SOA vs. PSO | 2.42 × 10−20 | 7.79 × 10−21 | 2.07 × 10−21 | 1.97 × 10−21 | 7.06 × 10−7 |
| SOA vs. GA | 4.18 × 10−21 | 2.02 × 10−21 | 1.97 × 10−21 | 1.97 × 10−21 | 1.71 × 10−7 |
| SOA | WSO | AVOA | RSA | MPA | TSA | WOA | MVO | GWO | TLBO | GSA | PSO | GA | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C11-F1 | mean | 3.703267 | 15.02557 | 25.74562 | 26.00412 | 4.069952 | 17.52275 | 21.89831 | 13.4942 | 15.568 | 20.13739 | 25.86975 | 21.49811 | 25.49193 |
| best | 2.68 × 10−10 | 11.75673 | 24.83901 | 25.15683 | 2.85 × 10−10 | 8.510385 | 17.24132 | 6.548961 | 10.72236 | 17.39148 | 24.1914 | 17.49104 | 24.75272 | |
| worst | 14.81307 | 19.29177 | 26.94225 | 27.78769 | 16.27981 | 21.63138 | 24.82611 | 16.5131 | 22.07106 | 22.56158 | 27.76547 | 25.58579 | 26.07053 | |
| std | 7.406534 | 3.129599 | 1.051112 | 1.209479 | 8.139905 | 6.077377 | 3.257521 | 4.67819 | 5.389997 | 2.179018 | 1.524199 | 3.753819 | 0.558841 | |
| median | 1.37 × 10−9 | 14.52688 | 25.60061 | 25.53597 | 1.48 × 10−9 | 19.97462 | 22.7629 | 15.45736 | 14.7393 | 20.29825 | 25.76107 | 21.45781 | 25.57223 | |
| rank | 1 | 4 | 11 | 13 | 2 | 6 | 9 | 3 | 5 | 7 | 12 | 8 | 10 | |
| C11-F2 | mean | −25.5074 | −22.3944 | −11.6301 | −8.06028 | −24.8695 | −6.49474 | −15.4353 | −9.34108 | −21.6587 | −8.61104 | −9.40185 | −22.0875 | −13.1955 |
| best | −26.343 | −22.8813 | −14.0599 | −8.64276 | −25.7669 | −9.42193 | −20.4428 | −12.3034 | −24.5033 | −9.39253 | −13.4981 | −24.4758 | −14.0636 | |
| worst | −24.2869 | −21.4054 | −9.06418 | −7.42364 | −23.6464 | −4.02889 | −11.7159 | −7.01703 | −15.7941 | −7.55467 | −6.03461 | −19.675 | −12.6002 | |
| std | 1.004079 | 0.674967 | 2.043459 | 0.550565 | 0.996461 | 2.542635 | 4.065062 | 2.333323 | 3.960315 | 0.858825 | 3.099445 | 2.334602 | 0.625598 | |
| median | −25.6998 | −22.6454 | −11.6981 | −8.08736 | −25.0324 | −6.26406 | −14.7912 | −9.02192 | −23.1687 | −8.74848 | −9.03735 | −22.0996 | −13.0591 | |
| rank | 1 | 3 | 8 | 12 | 2 | 13 | 6 | 10 | 5 | 11 | 9 | 4 | 7 | |
| C11-F4 | mean | −34.1366 | −29.4024 | −17.5227 | −16.7272 | −33.0629 | −27.8822 | −23.8592 | −27.1652 | −31.4271 | −14.1604 | −26.2837 | −7.58 | −8.27727 |
| best | −34.4821 | −33.8574 | −19.4025 | −19.341 | −34.2193 | −31.2664 | −27.0822 | −31.5712 | −34.2156 | −20.773 | −34.1647 | −11.3148 | −12.0614 | |
| worst | −33.4793 | −27.2841 | −16.1919 | −13.8236 | −31.812 | −25.793 | −21.0792 | −24.2788 | −26.2364 | −10.1154 | −21.2736 | −3.0134 | −4.22734 | |
| std | 0.452345 | 3.068482 | 1.37731 | 2.848936 | 0.998888 | 2.51344 | 2.466816 | 3.106749 | 3.57637 | 4.888331 | 5.749063 | 3.428548 | 3.376156 | |
| median | −34.2925 | −28.234 | −17.2482 | −16.8722 | −33.1102 | −27.2347 | −23.6377 | −26.4055 | −32.6282 | −12.8767 | −24.8482 | −7.99588 | −8.41014 | |
| rank | 1 | 4 | 9 | 10 | 2 | 5 | 8 | 6 | 3 | 11 | 7 | 13 | 12 | |
| C11-F5 | mean | −27.1938 | −19.3848 | −10.0921 | −10.5136 | −25.6126 | −12.3726 | −14.1942 | 0 | −22.2141 | −5.21334 | −14.2828 | 0 | 0 |
| best | −27.4298 | −23.0059 | −14.7254 | −11.5854 | −26.5001 | −19.429 | −15.0878 | 0 | −26.8272 | −12.1923 | −16.9124 | 0 | 0 | |
| worst | −26.4862 | −16.8457 | −7.09818 | −9.51564 | −23.0059 | 0 | −12.4219 | 0 | −19.5116 | 0 | −10.6775 | 0 | 0 | |
| std | 0.471752 | 2.647173 | 3.382754 | 1.153367 | 1.73799 | 8.505039 | 1.25671 | 0 | 3.488744 | 6.19006 | 3.109174 | 0 | 0 | |
| median | −27.4297 | −18.8438 | −9.27249 | −10.4768 | −26.4723 | −15.0308 | −14.6336 | 0 | −21.2588 | −4.33054 | −14.7707 | 0 | 0 | |
| rank | 1 | 4 | 9 | 8 | 2 | 7 | 6 | 11 | 3 | 10 | 5 | 11 | 11 | |
| C11-F6 | mean | 0.89073 | 1.14754 | 2.024755 | 2.155071 | 0.90234 | 1.643725 | 2.052031 | 0.965717 | 1.048196 | 1.874535 | 1.082047 | 1.180848 | 2.052041 |
| best | 0.866406 | 0.998087 | 1.6614 | 1.83069 | 0.841922 | 1.560405 | 1.793715 | 0.833545 | 0.938764 | 1.614306 | 0.905594 | 1.008846 | 1.855107 | |
| worst | 0.934629 | 1.258533 | 2.187947 | 2.345592 | 0.966592 | 1.831218 | 2.309743 | 1.247127 | 1.146828 | 2.007636 | 1.387668 | 1.423934 | 2.215405 | |
| std | 0.030907 | 0.129835 | 0.247021 | 0.227085 | 0.053749 | 0.125878 | 0.234016 | 0.190355 | 0.085177 | 0.17657 | 0.224094 | 0.176804 | 0.15728 | |
| median | 0.880943 | 1.16677 | 2.124836 | 2.222001 | 0.900423 | 1.591638 | 2.052333 | 0.891097 | 1.053595 | 1.938099 | 1.017464 | 1.145306 | 2.068825 | |
| rank | 1 | 6 | 10 | 13 | 2 | 8 | 11 | 3 | 4 | 9 | 5 | 7 | 12 | |
| C11-F7 | mean | 231.7975 | 223.6592 | 276.5 | 349.25 | 220 | 234 | 291.25 | 220 | 224.5 | 227 | 231.5 | 329.9552 | 229.8177 |
| best | 220 | 220 | 230 | 299 | 220 | 220 | 238 | 220 | 220 | 220 | 220 | 220 | 220 | |
| worst | 239.4414 | 234.6368 | 323 | 404 | 220 | 258 | 333 | 220 | 238 | 238 | 248 | 535.8208 | 259.2707 | |
| std | 8.387818 | 7.318376 | 40.02083 | 43.06874 | 0 | 18.11077 | 39.55903 | 0 | 9 | 8.717798 | 13.89244 | 141.2683 | 19.63537 | |
| median | 233.8743 | 220 | 276.5 | 347 | 220 | 229 | 297 | 220 | 220 | 225 | 229 | 282 | 220 | |
| rank | 7 | 2 | 9 | 12 | 1 | 8 | 10 | 1 | 3 | 4 | 6 | 11 | 5 | |
| C11-F8 | mean | 7306.049 | 735,450.4 | 1,029,600 | 1301,689 | 7878.018 | 96,263.48 | 401,545.2 | 127,251.3 | 29,143.13 | 549,851 | 998,962.5 | 1,637,763 | 2,186,754 |
| best | 4355.355 | 547,467.2 | 914,559 | 848,186.4 | 4665.333 | 69,896.59 | 323,827.5 | 88,847.38 | 17,099.15 | 377,823.8 | 955,606.7 | 616,975.9 | 2,097,586 | |
| worst | 11,321.75 | 873,535.9 | 1,112,084 | 1,528,229 | 12,237.1 | 134,708.9 | 547,008.1 | 164,393.9 | 42,638.2 | 747,382 | 1,052,476 | 3,466,500 | 2,273,623 | |
| std | 3118.179 | 147,088.4 | 86,808.81 | 308,299.6 | 3430.68 | 27,889.49 | 103,098.1 | 30,939.54 | 12,355.31 | 152,022.1 | 42,600.87 | 1256,071 | 72,053.94 | |
| median | 6773.544 | 760,399.2 | 1,045,878 | 1,415,170 | 7304.821 | 90,224.2 | 367,672.5 | 127,881.9 | 28,417.59 | 537,099 | 993,883.9 | 1,233,788 | 2,187,904 | |
| rank | 1 | 8 | 10 | 11 | 2 | 4 | 6 | 5 | 3 | 7 | 9 | 12 | 13 | |
| C11-F9 | mean | −21.1519 | −16.4886 | −8.89083 | −10.1972 | −19.7224 | −12.2849 | −9.69672 | −17.4831 | −11.0572 | −10.2549 | −11.3843 | −10.2803 | −10.0705 |
| best | −21.5356 | −18.7915 | −9.07622 | −10.5958 | −20.7818 | −15.2414 | −10.2871 | −21.2049 | −12.9979 | −10.2865 | −11.8241 | −10.364 | −10.1474 | |
| worst | −20.6824 | −14.5174 | −8.70287 | −9.81793 | −16.9694 | −10.5739 | −8.59883 | −12.3942 | −10.3885 | −10.2262 | −10.935 | −10.2224 | −9.99439 | |
| std | 0.418453 | 2.099664 | 0.19497 | 0.317858 | 1.843503 | 2.110651 | 0.788387 | 4.054017 | 1.294026 | 0.027217 | 0.446827 | 0.06044 | 0.066287 | |
| median | −21.1947 | −16.3228 | −8.89211 | −10.1875 | −20.5693 | −11.6621 | −9.95046 | −18.1667 | −10.4213 | −10.2535 | −11.389 | −10.2674 | −10.0701 | |
| rank | 1 | 4 | 13 | 10 | 2 | 5 | 12 | 3 | 7 | 9 | 6 | 8 | 11 | |
| C11-F10 | mean | 275,953.6 | 293,843.2 | 1,728,003 | 10,733,179 | 507,841.1 | 6814,247 | 1668,923 | 1969,755 | 4265,332 | 5,689,705 | 1,570,136 | 5710,499 | 6,730,921 |
| best | 111,906.1 | 119,680.6 | 1,671,593 | 10,440,242 | 443,295.4 | 5637,001 | 1596,987 | 1584,500 | 3731,297 | 5,689,705 | 1,439,379 | 5689,705 | 6,711,548 | |
| worst | 435,202.3 | 457,974.2 | 1,774,439 | 10,907,934 | 577,384.2 | 8,101,877 | 1718,805 | 2559,982 | 4585,233 | 5,689,705 | 1,703,594 | 5748,435 | 6,752,137 | |
| std | 133,300.2 | 140,150.7 | 43,954.16 | 203,662.6 | 57,922.72 | 1,169,664 | 51,360.73 | 465,329.2 | 378,888.6 | 0 | 128,768.8 | 27,792.26 | 17,639.59 | |
| median | 278,353 | 298,858.9 | 1,732,991 | 10,792,271 | 505,342.4 | 6,759,054 | 1,679,950 | 1,867,268 | 4,372,400 | 5,689,705 | 1,568,786 | 5,701,929 | 6,729,999 | |
| rank | 1 | 2 | 6 | 13 | 3 | 12 | 5 | 7 | 8 | 9 | 4 | 10 | 11 | |
| C11-F11 | mean | 1244,166 | 3917,084 | 7200,862 | 15,954,845 | 1,205,197 | 6,003,707 | 6,372,956 | 1,356,302 | 1,588,951 | 15,505,519 | 6777,124 | 2,450,810 | 15,381,122 |
| best | 1115,988 | 3701,366 | 6,994,873 | 14,807,307 | 1,087,931 | 4,992,934 | 5,869,317 | 1,237,960 | 1,378,205 | 14,999,220 | 6594,614 | 2,214,801 | 14,242,937 | |
| worst | 1331,317 | 4098,419 | 7,301,082 | 16,959,124 | 1,287,550 | 7,191,303 | 6,835,128 | 1,627,660 | 2,025,660 | 15,937,381 | 7026,405 | 2,558,421 | 16,446,911 | |
| std | 91,442.38 | 176,574.8 | 139,296.1 | 882,680.7 | 84,212.59 | 903,553.7 | 417,842.9 | 184,571.9 | 300,145.8 | 397,440.9 | 207,663.9 | 158,822.7 | 935,503.1 | |
| median | 1,264,680 | 3,934,275 | 7,253,747 | 16,026,475 | 1,222,653 | 5,915,295 | 6,393,689 | 1,279,795 | 1,475,969 | 15,542,737 | 6,743,739 | 2,515,010 | 15,417,320 | |
| rank | 2 | 6 | 10 | 13 | 1 | 7 | 8 | 3 | 4 | 12 | 9 | 5 | 11 | |
| C11-F12 | mean | 15,444.2 | 15,775.42 | 15,454.67 | 16,506.66 | 16,390.34 | 15,566.71 | 15,506.98 | 15,488.7 | 15,519.23 | 15,935.78 | 129,995.2 | 15,515.88 | 16,052.38 |
| best | 15,444.19 | 15,444.23 | 15,451.9 | 15,996.18 | 15,444.21 | 15,529.77 | 15,484.73 | 15,469.18 | 15,500.74 | 15,514.42 | 113,048.8 | 15,477.7 | 15,489.97 | |
| worst | 15,444.21 | 16,732.14 | 15,457.72 | 17,774.94 | 16,966.72 | 15,613.13 | 15,533.89 | 15,505.51 | 15,547.46 | 16,670.71 | 151,977.1 | 15,555.92 | 17,025.63 | |
| std | 0.010596 | 637.9726 | 2.451103 | 852.4752 | 667.7195 | 35.95627 | 24.013 | 14.9133 | 20.19086 | 541.7847 | 16,644.88 | 33.017 | 694.0509 | |
| median | 15,444.19 | 15,462.66 | 15,454.53 | 16,127.77 | 16,575.22 | 15,561.97 | 15,504.65 | 15,490.05 | 15,514.36 | 15,778.99 | 127477.5 | 15,514.94 | 15,846.96 | |
| rank | 1 | 8 | 2 | 12 | 11 | 7 | 4 | 3 | 6 | 9 | 13 | 5 | 10 | |
| C11-F13 | mean | 18,808.95 | 18,401.87 | 18,913.78 | 276,941.8 | 18,308.93 | 19,373.02 | 19,262.54 | 19,316.49 | 19,545.76 | 108,292.5 | 19,295.41 | 19,116.86 | 19,139.07 |
| best | 18,583.4 | 18,212.02 | 18,679.04 | 202,857.5 | 18,281.42 | 19,118.13 | 19,044.16 | 19,136.48 | 19,340.25 | 42,350.89 | 19,218.27 | 18,963.55 | 18,965.28 | |
| worst | 18,941.42 | 18,524.11 | 19,086.98 | 400,961 | 18,342.71 | 19,749.48 | 19,529.18 | 19,493.59 | 19,714.25 | 254,303.9 | 19,414.24 | 19,255.93 | 19,268.32 | |
| std | 156.5688 | 134.1286 | 181.804 | 88,734.65 | 31.09058 | 267.474 | 210.8087 | 146.6933 | 196.8206 | 98,161.29 | 84.17887 | 157.4519 | 144.5224 | |
| median | 18,855.48 | 18,435.69 | 18,944.54 | 251,974.4 | 18,305.8 | 19,312.23 | 19,238.41 | 19,317.94 | 19,564.27 | 68,257.65 | 19,274.56 | 19,123.97 | 19,161.34 | |
| rank | 3 | 2 | 4 | 13 | 1 | 10 | 7 | 9 | 11 | 12 | 8 | 5 | 6 | |
| C11-F14 | mean | 33,436.9 | 33,006.71 | 239,954.4 | 2,343,498 | 32,840.39 | 58,551.43 | 55,559.51 | 32,996.16 | 33,227.12 | 9,328,370 | 406,885.7 | 33,333.04 | 6,772,673 |
| best | 33,126.18 | 32,844.61 | 61,174.85 | 975,713.9 | 32,786.83 | 33,205.38 | 33,070.23 | 32,880.13 | 33,076.3 | 5,245,604 | 353,167.1 | 33,320.61 | 4,619,131 | |
| worst | 33,831.7 | 33,126.57 | 439,827.3 | 6,129,448 | 32,874.34 | 133,374.7 | 122,653.1 | 33,127.33 | 33,382.38 | 13,754,921 | 429,323.5 | 33,357.17 | 10,429,108 | |
| std | 309.7042 | 134.8848 | 203,421.2 | 2,527,893 | 37.99649 | 49,883.49 | 44,729.12 | 107.7502 | 132.081 | 3,483,336 | 36,212.51 | 17.05479 | 2,694,081 | |
| median | 33,394.87 | 33,027.82 | 229,407.7 | 1,134,415 | 32,850.19 | 33,812.82 | 33,257.37 | 32,988.58 | 33,224.9 | 9,156,476 | 422,526.2 | 33,327.18 | 6,021,226 | |
| rank | 6 | 3 | 9 | 11 | 1 | 8 | 7 | 2 | 4 | 13 | 10 | 5 | 12 | |
| C11-F15 | mean | 131,896.2 | 140,692.8 | 138,044.1 | 2362,861 | 141,030 | 139,185.7 | 149,714.5 | 142,078 | 137,989.1 | 98,216,083 | 16,661,057 | 82,739,645 | 90,489,805 |
| best | 129,599.2 | 134,258.9 | 134,145.7 | 551,007.8 | 136,822.8 | 134,983.1 | 143,326.3 | 137,708.7 | 134,926 | 81,712,714 | 145,480.7 | 67,023,611 | 77,222,102 | |
| worst | 133,406.6 | 151,586.1 | 142,366.4 | 5916,825 | 143,594.4 | 144,166.6 | 156,177.1 | 149,494.5 | 143,091.5 | 1.11 × 108 | 42,521,588 | 1 × 108 | 1.04 × 108 | |
| std | 1692.118 | 7711.282 | 3367.715 | 2,413,071 | 3052.919 | 3843.03 | 5629.417 | 5157.713 | 3897.759 | 12,641,427 | 18,783,856 | 16,142,420 | 11,527,058 | |
| median | 132,289.6 | 138,463.1 | 137,832.2 | 1491,805 | 141,851.4 | 138,796.5 | 149,677.3 | 140,554.5 | 136,969.5 | 99,861,336 | 11,988,581 | 81,736,076 | 90,566,521 | |
| rank | 1 | 5 | 3 | 9 | 6 | 4 | 8 | 7 | 2 | 13 | 10 | 11 | 12 | |
| C11-F16 | mean | 1,992,168 | 4,080,675 | 6.39 × 109 | 1.91 × 1010 | 1,931,384 | 1.7 × 109 | 1.12 × 1010 | 3,335,018 | 2,977,526 | 2.45 × 1010 | 1.37 × 1010 | 2.05 × 1010 | 2.24 × 1010 |
| best | 1,966,581 | 1,935,090 | 5.81 × 109 | 1.37 × 1010 | 1,899,652 | 9.95 × 108 | 8.91 × 109 | 2,994,846 | 2,450,995 | 1.85 × 1010 | 1.1 × 1010 | 1.67 × 1010 | 2.1 × 1010 | |
| worst | 2,004,837 | 9,745,854 | 7 × 109 | 2.33 × 1010 | 1,956,433 | 2.5 × 109 | 1.29 × 1010 | 3,937,955 | 3,345,029 | 2.98 × 1010 | 1.55 × 1010 | 2.44 × 1010 | 2.39 × 1010 | |
| std | 17,340.9 | 3,793,542 | 5.24 × 108 | 4.12 × 109 | 24,490.05 | 6.31 × 108 | 1.81 × 109 | 435,811.6 | 379,800.1 | 5.09 × 109 | 1.91 × 109 | 3.47 × 109 | 1.26 × 109 | |
| median | 1,998,628 | 2,320,879 | 6.38 × 109 | 1.96 × 1010 | 1,934,726 | 1.66 × 109 | 1.15 × 1010 | 3,203,636 | 3,057,041 | 2.48 × 1010 | 1.41 × 1010 | 2.04 × 1010 | 2.24 × 1010 | |
| rank | 2 | 5 | 7 | 10 | 1 | 6 | 8 | 4 | 3 | 13 | 9 | 11 | 12 | |
| C11-F17 | mean | 966,310.6 | 1,616,414 | 16,449,493 | 1.45 × 108 | 944,296.7 | 1909,746 | 12,427,380 | 986,840.3 | 1100,256 | 29,913,771 | 14,001,521 | 1.87 × 108 | 1.28 × 108 |
| best | 952,773.8 | 1,094,971 | 9,228,474 | 1 × 108 | 941,062.2 | 1271,774 | 4919,875 | 958,253.1 | 1018,907 | 26,861,276 | 11,017,330 | 1.75 × 108 | 1.26 × 108 | |
| worst | 979,957.6 | 2,285,712 | 29,396,167 | 1.66 × 108 | 947,649.9 | 2280,117 | 25,716,414 | 1,030,102 | 1,340,216 | 37,140,318 | 17,250,112 | 2.03 × 108 | 1.32 × 108 | |
| std | 11,741.73 | 494,288.8 | 9,390,234 | 30,701,419 | 2718.591 | 440,403.5 | 9,750,591 | 30,602.88 | 159,976.7 | 4,871,672 | 2,620,744 | 14,016,796 | 3,160,298 | |
| median | 966,255.5 | 1,542,486 | 13,586,665 | 1.57 × 108 | 944,237.3 | 2,043,546 | 9,536,616 | 979,503 | 1,020,951 | 27,826,745 | 13,869,321 | 1.85 × 108 | 1.27 × 108 | |
| rank | 2 | 5 | 9 | 12 | 1 | 6 | 7 | 3 | 4 | 10 | 8 | 13 | 11 | |
| C11-F18 | mean | 1,000,924 | 2,590,116 | 16,582,334 | 1.42 × 108 | 1,069,181 | 2,937,110 | 14,575,361 | 1,710,525 | 1,589,011 | 35,041,852 | 15,310,972 | 1.81 × 108 | 1.27 × 108 |
| best | 943,538.7 | 1,954,981 | 14,730,898 | 1.23 × 108 | 997,145.1 | 2,414,231 | 5831,462 | 1,393,338 | 1,167,771 | 26,831,644 | 9,362,833 | 1.66 × 108 | 1.26 × 108 | |
| worst | 1,061,517 | 3,891,235 | 20,548,870 | 1.79 × 108 | 1130,546 | 3,393,560 | 22,239,505 | 2,349,957 | 1,889,412 | 48,044,844 | 18,324,799 | 1.98 × 108 | 1.28 × 108 | |
| std | 52,438.1 | 879,404 | 2678,190 | 26,103,571 | 55,567.61 | 467,088.6 | 7,003,567 | 433,187.8 | 318,048.5 | 9,787,189 | 4,155,256 | 13,395,124 | 674,274.6 | |
| median | 999,320.4 | 2,257,125 | 15,524,785 | 1.34 × 108 | 1,074,517 | 2,970,325 | 15,115,238 | 1,549,403 | 1,649,430 | 32,645,460 | 16,778,129 | 1.81 × 108 | 1.26 × 108 | |
| rank | 1 | 5 | 9 | 12 | 2 | 6 | 7 | 4 | 3 | 10 | 8 | 13 | 11 | |
| C11-F19 | mean | 955,907 | 3,058,450 | 14,619,890 | 1.54 × 108 | 943,673 | 2,198,561 | 9,996,685 | 1,012,821 | 1,152,320 | 32,955,731 | 15,021,597 | 1.71 × 108 | 1.27 × 108 |
| best | 946,161.6 | 1,019,342 | 12,702,812 | 1.34 × 108 | 939,631 | 1,982,053 | 7,065,299 | 967,576.5 | 1,006,006 | 28,464,019 | 8,991,833 | 1.42 × 108 | 1.25 × 108 | |
| worst | 965,274.1 | 8,406,301 | 16,683,672 | 1.83 × 108 | 945,155.6 | 2,462,708 | 16,377,179 | 1,042,643 | 1,410,250 | 38,222,795 | 20,803,805 | 1.98 × 108 | 1.29 × 108 | |
| std | 7877.253 | 3,580,771 | 1,652,290 | 20,568,980 | 2698.357 | 216,671.7 | 4,296,432 | 32,544.64 | 184,022.2 | 4361,221 | 5,235,721 | 26,365,907 | 21,75,679 | |
| median | 956,096.1 | 1,404,078 | 14,546,539 | 1.49 × 108 | 944,952.7 | 2,174,742 | 8,272,131 | 1,020,533 | 1,096,512 | 32,568,056 | 15,145,374 | 1.73 × 108 | 1.27 × 108 | |
| rank | 2 | 6 | 8 | 12 | 1 | 5 | 7 | 3 | 4 | 10 | 9 | 13 | 11 | |
| C11-F20 | mean | 9.891135 | 18.43484 | 37.38995 | 91.01355 | 10.6478 | 33.26948 | 50.31143 | 30.14097 | 31.4193 | 106.5034 | 42.42906 | 99.89802 | 120.8118 |
| best | 8.48708 | 17.10456 | 35.08192 | 66.45898 | 9.075328 | 27.26106 | 37.94496 | 24.44492 | 20.005 | 96.68012 | 36.61611 | 94.66104 | 117.9591 | |
| worst | 12.17501 | 20.77307 | 38.49468 | 115.651 | 12.96167 | 40.06704 | 54.83165 | 34.77377 | 39.31062 | 119.9895 | 48.12816 | 104.208 | 122.6439 | |
| std | 1.597904 | 1.636928 | 1.602459 | 21.7381 | 1.659265 | 5.379866 | 8.261372 | 4.569823 | 8.429287 | 10.42733 | 5.629644 | 4.140173 | 2.131154 | |
| median | 9.451225 | 17.93087 | 37.9916 | 90.97211 | 10.27711 | 32.87492 | 54.23456 | 30.67259 | 33.18078 | 104.672 | 42.48599 | 100.3615 | 121.3222 | |
| rank | 1 | 3 | 7 | 10 | 2 | 6 | 9 | 4 | 5 | 12 | 8 | 11 | 13 | |
| C11-F21 | mean | 15.56392 | 27.48089 | 47.41507 | 74.30445 | 16.73979 | 34.48503 | 50.05503 | 27.46992 | 27.25074 | 97.52848 | 77.12081 | 96.64377 | 90.22154 |
| best | 11.96234 | 25.26953 | 41.00099 | 52.03457 | 12.7765 | 27.49964 | 44.78979 | 20.42011 | 24.60761 | 88.33535 | 63.26603 | 83.14479 | 55.52377 | |
| worst | 19.37189 | 32.64845 | 56.32061 | 85.38791 | 20.57706 | 46.01433 | 59.96269 | 34.30754 | 30.17099 | 110.6057 | 103.444 | 115.6542 | 116.5376 | |
| std | 3.098876 | 3.475444 | 7.085416 | 15.10545 | 3.240004 | 8.054631 | 7.08343 | 6.257589 | 2.843483 | 10.47165 | 17.91987 | 13.69907 | 26.29488 | |
| median | 15.46073 | 26.00279 | 46.16933 | 79.89766 | 16.8028 | 32.21307 | 47.73381 | 27.57601 | 27.11219 | 95.58645 | 70.8866 | 93.88804 | 94.41237 | |
| rank | 1 | 5 | 7 | 9 | 2 | 6 | 8 | 4 | 3 | 13 | 10 | 12 | 11 | |
| C11-F22 | mean | 3.703267 | 15.02557 | 25.74562 | 26.00412 | 4.069952 | 17.52275 | 21.89831 | 13.4942 | 15.568 | 20.13739 | 25.86975 | 21.49811 | 25.49193 |
| best | 2.68 × 10−10 | 11.75673 | 24.83901 | 25.15683 | 2.85 × 10−10 | 8.510385 | 17.24132 | 6.548961 | 10.72236 | 17.39148 | 24.1914 | 17.49104 | 24.75272 | |
| worst | 14.81307 | 19.29177 | 26.94225 | 27.78769 | 16.27981 | 21.63138 | 24.82611 | 16.5131 | 22.07106 | 22.56158 | 27.76547 | 25.58579 | 26.07053 | |
| std | 7.406534 | 3.129599 | 1.051112 | 1.209479 | 8.139905 | 6.077377 | 3.257521 | 4.67819 | 5.389997 | 2.179018 | 1.524199 | 3.753819 | 0.558841 | |
| median | 1.37 × 10−9 | 14.52688 | 25.60061 | 25.53597 | 1.48 × 10−9 | 19.97462 | 22.7629 | 15.45736 | 14.7393 | 20.29825 | 25.76107 | 21.45781 | 25.57223 | |
| rank | 1 | 4 | 11 | 13 | 2 | 6 | 9 | 3 | 5 | 7 | 12 | 8 | 10 | |
| Sum rank | 38 | 91 | 161 | 226 | 48 | 140 | 154 | 96 | 91 | 205 | 166 | 189 | 213 | |
| Mean rank | 1.809524 | 4.333333 | 7.666667 | 10.7619 | 2.285714 | 6.666667 | 7.333333 | 4.571429 | 4.333333 | 9.761905 | 7.904762 | 9 | 10.14286 | |
| Total rank | 1 | 3 | 7 | 12 | 2 | 5 | 6 | 4 | 3 | 10 | 8 | 9 | 11 | |
| Wilcoxon: p-value | 1.81 × 10−7 | 1.09 × 10−14 | 1.71 × 10−15 | 0.522069 | 8.49 × 10−15 | 2.42 × 10−14 | 6.09 × 10−10 | 2.71 × 10−12 | 5.56 × 10−15 | 7.92 × 10−15 | 8.57 × 10−14 | 7.92 × 10−15 | ||
| Algorithm | Optimum Variables | Optimum Cost | |||
|---|---|---|---|---|---|
| Ts | Th | R | L | ||
| SOA | 0.778027 | 0.384579 | 40.31228 | 200 | 5882.901 |
| WSO | 0.778027 | 0.384579 | 40.31228 | 200 | 5882.901 |
| AVOA | 0.778027 | 0.384579 | 40.31228 | 200 | 5882.901 |
| RSA | 0.873804 | 0.743654 | 41.80167 | 200 | 7974.077 |
| MPA | 0.778027 | 0.384579 | 40.31228 | 200 | 5882.901 |
| TSA | 0.780589 | 0.390787 | 40.34795 | 200 | 5925.31 |
| WOA | 0.956571 | 0.48327 | 49.13929 | 105.2553 | 6351.3 |
| MVO | 0.860496 | 0.426361 | 44.58435 | 148.0464 | 6044.069 |
| GWO | 0.779811 | 0.38726 | 40.39606 | 198.8451 | 5892.513 |
| TLBO | 1.997346 | 0.976593 | 75.72573 | 77.86602 | 24,264.99 |
| GSA | 1.129784 | 0.558452 | 58.53792 | 108.2202 | 9777.026 |
| PSO | 1.381856 | 0.696892 | 60.63946 | 169.9479 | 16,744.76 |
| GA | 0.962225 | 2.050866 | 47.54579 | 183.9335 | 14,893.63 |
| Algorithm | Mean | Best | Worst | Std | Median | Rank |
|---|---|---|---|---|---|---|
| SOA | 5882.901 | 5882.901 | 5882.901 | 1.87 × 10−12 | 5882.901 | 1 |
| WSO | 5906.961 | 5882.901 | 6118.936 | 58.51093 | 5882.901 | 3 |
| AVOA | 6318.02 | 5883.453 | 7029.777 | 356.8045 | 6324.189 | 6 |
| RSA | 12,261.31 | 7974.077 | 20,310.05 | 3514.19 | 11,063.85 | 9 |
| MPA | 5889.237 | 5883.856 | 5893.836 | 2.708182 | 5888.898 | 2 |
| TSA | 6257.625 | 5925.31 | 7013.933 | 368.492 | 6102.727 | 5 |
| WOA | 7683.151 | 6351.3 | 11,250.02 | 1293.839 | 7295.016 | 8 |
| MVO | 6668.44 | 6044.069 | 7322.993 | 415.1949 | 6676.802 | 7 |
| GWO | 6112.193 | 5892.513 | 7112.804 | 416.0391 | 5909.954 | 4 |
| TLBO | 42,144.27 | 24,264.99 | 83,025.09 | 16,815.72 | 38,698.07 | 12 |
| GSA | 21,921.33 | 9777.026 | 35,302.66 | 7701.707 | 21,288.72 | 10 |
| PSO | 42,957.13 | 16,744.76 | 75,536.88 | 15,181.17 | 46,304.65 | 13 |
| GA | 40,300.82 | 14,893.63 | 98,448.02 | 18,294.20 | 35,672.07 | 11 |
| Algorithm | Optimum Variables | Optimum Cost | ||||||
|---|---|---|---|---|---|---|---|---|
| b | M | p | b1 | b2 | d1 | d2 | ||
| SOA | 3.5 | 0.7 | 17 | 7.3 | 7.8 | 3.350215 | 5.286683 | 2996.348 |
| WSO | 3.5 | 0.7 | 17 | 7.300003 | 7.800006 | 3.350215 | 5.286683 | 2996.349 |
| AVOA | 3.5 | 0.7 | 17 | 7.3 | 7.8 | 3.350215 | 5.286683 | 2996.348 |
| RSA | 3.6 | 0.7 | 17 | 7.3 | 8.3 | 3.351345 | 5.5 | 3188.612 |
| MPA | 3.5 | 0.7 | 17 | 7.3 | 7.8 | 3.350215 | 5.286683 | 2996.348 |
| TSA | 3.502004 | 0.7 | 17 | 7.531361 | 7.918844 | 3.353967 | 5.292829 | 3006.665 |
| WOA | 3.524215 | 0.700895 | 17 | 7.859427 | 7.957261 | 3.351278 | 5.317321 | 3038.216 |
| MVO | 3.503185 | 0.7 | 17 | 7.425817 | 7.839415 | 3.374115 | 5.286934 | 3005.882 |
| GWO | 3.500789 | 0.7 | 17 | 7.468265 | 7.818522 | 3.351642 | 5.286764 | 2998.965 |
| TLBO | 3.575075 | 0.710376 | 26.87747 | 7.412554 | 7.933867 | 3.401006 | 5.308059 | 5360.781 |
| GSA | 3.555741 | 0.701286 | 17.26289 | 8.153121 | 8.159038 | 3.443303 | 5.348242 | 3150.666 |
| PSO | 3.577873 | 0.703145 | 17.69495 | 7.75669 | 8.048995 | 3.736336 | 5.2889 | 3289.236 |
| GA | 3.57042 | 0.700615 | 20.37875 | 8.029033 | 8.055597 | 3.433943 | 5.362534 | 3758.934 |
| Algorithm | Mean | Best | Worst | Std | Median | Rank |
|---|---|---|---|---|---|---|
| SOA | 2996.348 | 2996.348 | 2996.348 | 9.33 × 10−13 | 2996.348 | 1 |
| WSO | 2996.845 | 2996.349 | 3004.806 | 1.876691 | 2996.367 | 2 |
| AVOA | 3000.507 | 2996.348 | 3010.109 | 4.665488 | 2999.125 | 4 |
| RSA | 3273.628 | 3188.612 | 3363.873 | 60.87604 | 3258.238 | 8 |
| MPA | 2999.118 | 2996.44 | 3002.078 | 1.841197 | 2999.338 | 3 |
| TSA | 3038.484 | 3006.665 | 3059.817 | 14.5261 | 3039.687 | 7 |
| WOA | 3354.082 | 3038.216 | 5582.461 | 653.6465 | 3113.028 | 9 |
| MVO | 3032.462 | 3005.882 | 3058.964 | 16.87454 | 3032.846 | 6 |
| GWO | 3004.446 | 2998.965 | 3009.552 | 3.542339 | 3004.059 | 5 |
| TLBO | 6.67 × 1013 | 5360.781 | 2.32 × 1014 | 7.04 × 1013 | 4.58 × 1013 | 12 |
| GSA | 3498.023 | 3150.666 | 4508.259 | 317.1042 | 3414.037 | 10 |
| PSO | 1.32 × 1014 | 3289.236 | 1.32 × 1015 | 2.95 × 1014 | 4.5 × 1013 | 13 |
| GA | 6.44 × 1013 | 3758.934 | 5.09 × 1014 | 1.34 × 1014 | 1.05 × 1013 | 11 |
| Algorithm | Optimum Variables | Optimum Cost | |||
|---|---|---|---|---|---|
| h | l | t | b | ||
| SOA | 0.20573 | 3.470489 | 9.036624 | 0.20573 | 1.724852 |
| WSO | 0.20573 | 3.470489 | 9.036624 | 0.20573 | 1.724852 |
| AVOA | 0.20573 | 3.470489 | 9.036624 | 0.20573 | 1.724852 |
| RSA | 0.150134 | 4.75063 | 10 | 0.206313 | 1.979431 |
| MPA | 0.20573 | 3.470489 | 9.036624 | 0.20573 | 1.724852 |
| TSA | 0.201353 | 3.584929 | 9.045002 | 0.205782 | 1.735242 |
| WOA | 0.20488 | 3.546188 | 8.921686 | 0.211065 | 1.754013 |
| MVO | 0.203146 | 3.539276 | 9.03661 | 0.205819 | 1.730769 |
| GWO | 0.205462 | 3.479 | 9.036729 | 0.205759 | 1.72583 |
| TLBO | 0.236531 | 7.25166 | 7.68074 | 0.29846 | 2.791973 |
| GSA | 0.192398 | 4.185734 | 9.345858 | 0.219364 | 1.964869 |
| PSO | 0.240686 | 4.095809 | 7.000139 | 0.598026 | 3.90663 |
| GA | 0.133949 | 6.613311 | 9.470163 | 0.396197 | 3.852019 |
| Algorithm | Mean | Best | Worst | std | Median | Rank |
|---|---|---|---|---|---|---|
| SOA | 1.724852 | 1.724852 | 1.724852 | 6.83 × 10−16 | 1.724852 | 1 |
| WSO | 1.724852 | 1.724852 | 1.724854 | 4.32 × 10−7 | 1.724852 | 2 |
| AVOA | 1.759209 | 1.725117 | 1.892483 | 0.041877 | 1.74656 | 7 |
| RSA | 2.279139 | 1.979431 | 2.751124 | 0.211874 | 2.258755 | 8 |
| MPA | 1.726515 | 1.725441 | 1.728092 | 0.000972 | 1.726346 | 3 |
| TSA | 1.746863 | 1.735242 | 1.761533 | 0.006875 | 1.746978 | 5 |
| WOA | 2.509499 | 1.754013 | 4.629688 | 0.875301 | 2.11047 | 10 |
| MVO | 1.749039 | 1.730769 | 1.807243 | 0.017414 | 1.745069 | 6 |
| GWO | 1.727289 | 1.72583 | 1.730001 | 0.001078 | 1.727085 | 4 |
| TLBO | 4.32 × 1013 | 2.791973 | 4.69 × 1014 | 1.24 × 1014 | 5.331066 | 12 |
| GSA | 2.455232 | 1.964869 | 2.876107 | 0.258565 | 2.391602 | 9 |
| PSO | 7.27 × 1013 | 3.90663 | 3.02 × 1014 | 1.16 × 1014 | 5.09 × 1012 | 13 |
| GA | 3.15 × 1013 | 3.852019 | 2.37 × 1014 | 7.65 × 1013 | 5.36045 | 11 |
| Algorithm | Optimum Variables | Optimum Cost | ||
|---|---|---|---|---|
| d | D | P | ||
| SOA | 0.051689 | 0.356718 | 11.28897 | 0.012665 |
| WSO | 0.051689 | 0.356716 | 11.28906 | 0.012665 |
| AVOA | 0.051689 | 0.356718 | 11.28897 | 0.012665 |
| RSA | 0.05 | 0.310493 | 15 | 0.013196 |
| MPA | 0.051688 | 0.356703 | 11.28982 | 0.012665 |
| TSA | 0.051504 | 0.352152 | 11.57771 | 0.012683 |
| WOA | 0.052121 | 0.36721 | 10.69936 | 0.012669 |
| MVO | 0.061321 | 0.635221 | 3.976356 | 0.014275 |
| GWO | 0.05171 | 0.357118 | 11.27238 | 0.012674 |
| TLBO | 0.069275 | 0.939724 | 2 | 0.018039 |
| GSA | 0.05514 | 0.439926 | 8.921418 | 0.014608 |
| PSO | 0.068994 | 0.933432 | 2 | 0.017773 |
| GA | 0.069308 | 0.940961 | 2 | 0.01808 |
| Algorithm | Mean | Best | Worst | Std | Median | Rank |
|---|---|---|---|---|---|---|
| SOA | 0.012665 | 0.012665 | 0.012665 | 1.19 × 10−18 | 0.012665 | 1 |
| WSO | 0.012683 | 0.012665 | 0.012851 | 4.4 × 10−5 | 0.012666 | 3 |
| AVOA | 0.013316 | 0.012684 | 0.014868 | 0.000655 | 0.013049 | 7 |
| RSA | 0.026737 | 0.013196 | 0.152646 | 0.033029 | 0.013333 | 11 |
| MPA | 0.012676 | 0.012666 | 0.01269 | 7.04 × 10−6 | 0.012674 | 2 |
| TSA | 0.012967 | 0.012683 | 0.013663 | 0.00028 | 0.012883 | 5 |
| WOA | 0.013266 | 0.012669 | 0.01558 | 0.000739 | 0.013041 | 6 |
| MVO | 0.017716 | 0.014275 | 0.018434 | 0.000985 | 0.017988 | 8 |
| GWO | 0.012769 | 0.012674 | 0.013195 | 0.00012 | 0.012727 | 4 |
| TLBO | 0.018633 | 0.018039 | 0.019221 | 0.000332 | 0.018711 | 9 |
| GSA | 0.019185 | 0.014608 | 0.036067 | 0.004735 | 0.017658 | 10 |
| PSO | 1.99 × 1013 | 0.017773 | 3.97 × 1014 | 8.88 × 1013 | 0.017773 | 13 |
| GA | 3.38 × 1012 | 0.01808 | 5.31 × 1013 | 1.19 × 1013 | 0.026219 | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dehghani, M.; Trojovský, P. Serval Optimization Algorithm: A New Bio-Inspired Approach for Solving Optimization Problems. Biomimetics 2022, 7, 204. https://doi.org/10.3390/biomimetics7040204
Dehghani M, Trojovský P. Serval Optimization Algorithm: A New Bio-Inspired Approach for Solving Optimization Problems. Biomimetics. 2022; 7(4):204. https://doi.org/10.3390/biomimetics7040204
Chicago/Turabian StyleDehghani, Mohammad, and Pavel Trojovský. 2022. "Serval Optimization Algorithm: A New Bio-Inspired Approach for Solving Optimization Problems" Biomimetics 7, no. 4: 204. https://doi.org/10.3390/biomimetics7040204
APA StyleDehghani, M., & Trojovský, P. (2022). Serval Optimization Algorithm: A New Bio-Inspired Approach for Solving Optimization Problems. Biomimetics, 7(4), 204. https://doi.org/10.3390/biomimetics7040204