
Teaching Bioinspired Design for Assistive Technologies Using Additive Manufacturing: A Collaborative Experience

 ,
, 
 ,
,
Abstract

1. Introduction
2. Materials and Methods
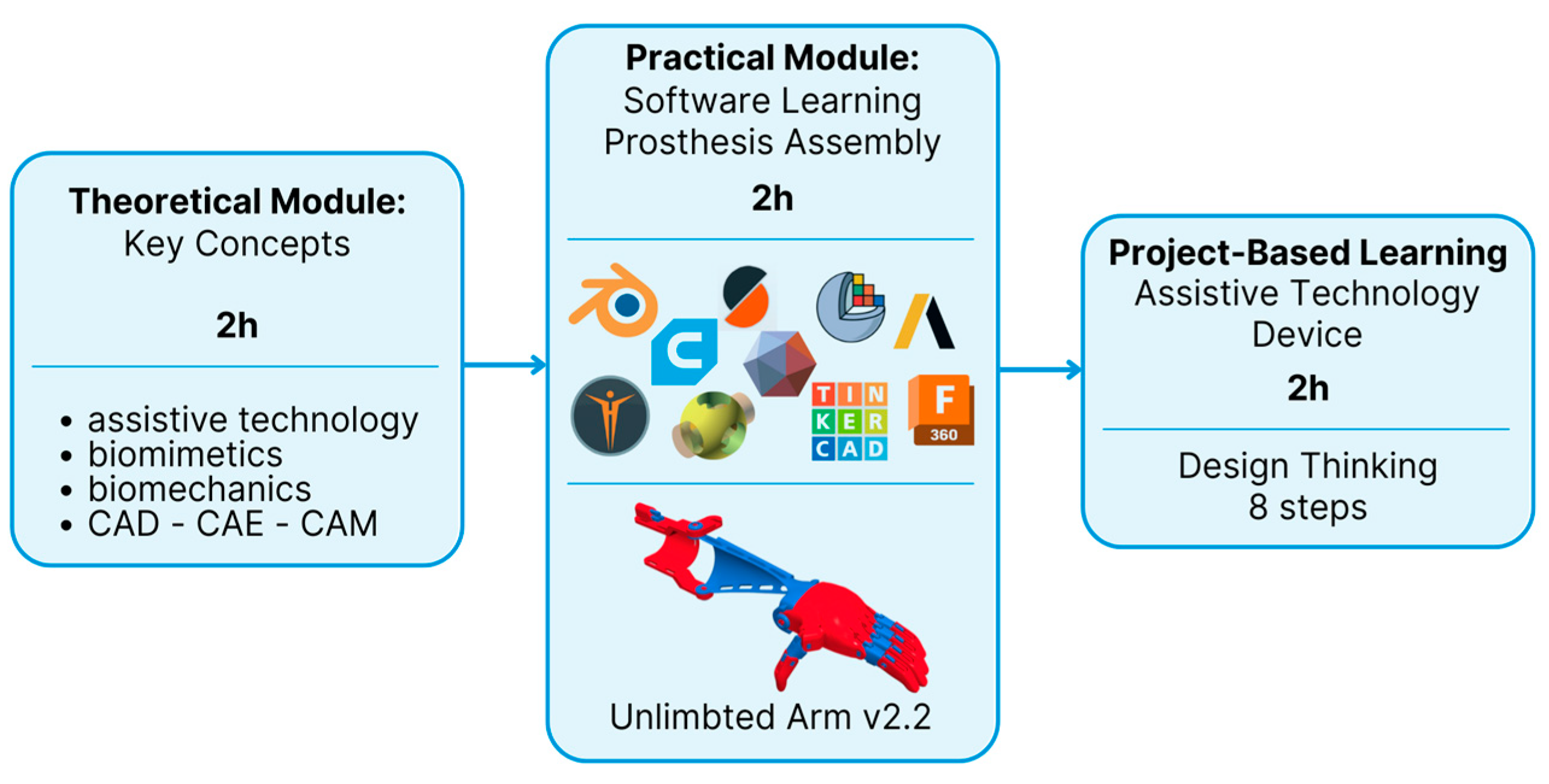
2.1. Course Overview: Educational Objectives and Learning Approach
2.2. Theoretical and Practical Modules
2.3. Project Development Process
2.4. Evaluation and Feedback
- The empathy map: introduction to human-centered design through analysis of the lived experiences of individuals with physical disabilities;
- Literature review: identification of validated solutions and design gaps through scientific inquiry;
- Technical drawings: translation of conceptual ideas into 2D schematics;
- 3D modeling (CAD): spatial reasoning and manufacturability considerations;
- Mechanical simulation using Finite Element Modeling (FEM): performance analysis under mechanical loads;
- Initial prototyping: physical 3D printing of the first version;
- Iterative refinement: design optimizations based on testing and evaluation;
- Final prototype: functional assistive device integrating all prior stages.
- Pitch presentation (5 min): communicating innovation and impact succinctly to academic and professional audiences;
- Scientific report: documentation of the design process, validation methods, and critical reflections following academic standards.
3. Results
3.1. Course Overview: Educational Outcomes
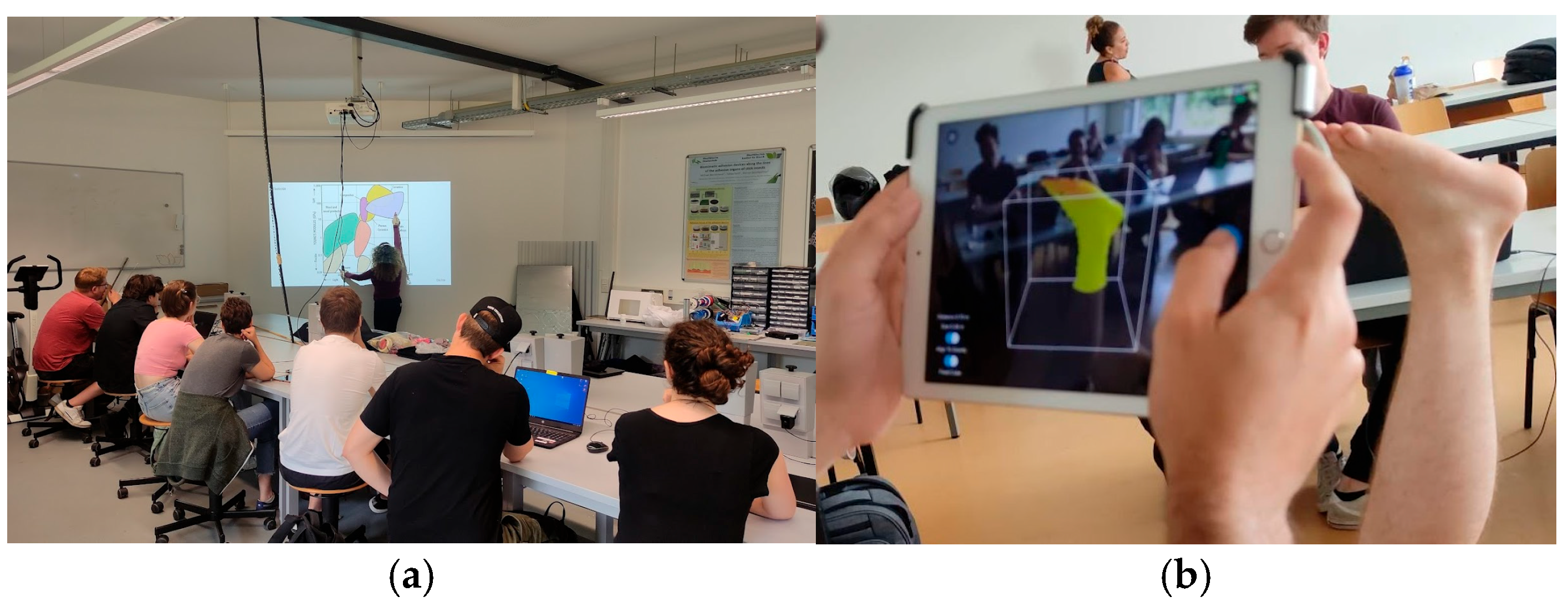
3.2. Theoretical and Practical Integration
3.3. Project Development by Students
3.3.1. Finger Prosthesis for Musician
- Problem Definition: The user scenario emphasized challenges in performing tasks requiring opposition and grasp, such as picking up small objects. The goal was to restore basic hand functions using a mechanically simple, non-electronic solution;
- Biological Research: Avian anatomy—particularly bird phalanges known for lightness and efficient force transmission—inspired a segmented, angled finger design that could replicate essential joint motion;
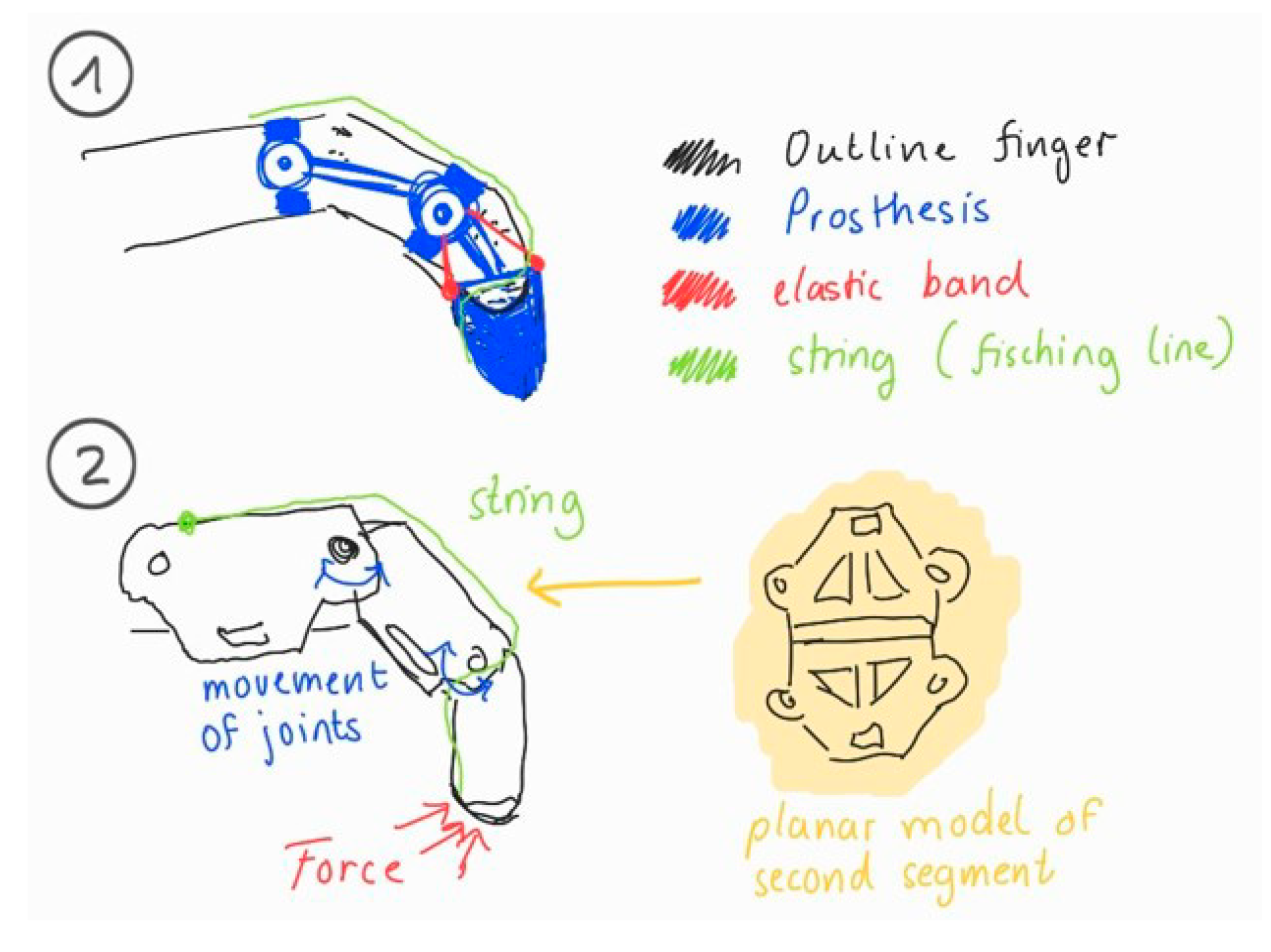
- Ideation: Early concepts were sketched using semantic panels to explore mechanical function and comfort. Elastic bands and strings were proposed for passive actuation (Figure 4);
- 4.
- Decision-making: A decision matrix guided the selection of PLA filament for rigidity and dental rubber bands for return force, balancing cost, printability, and functional response;
- 5.
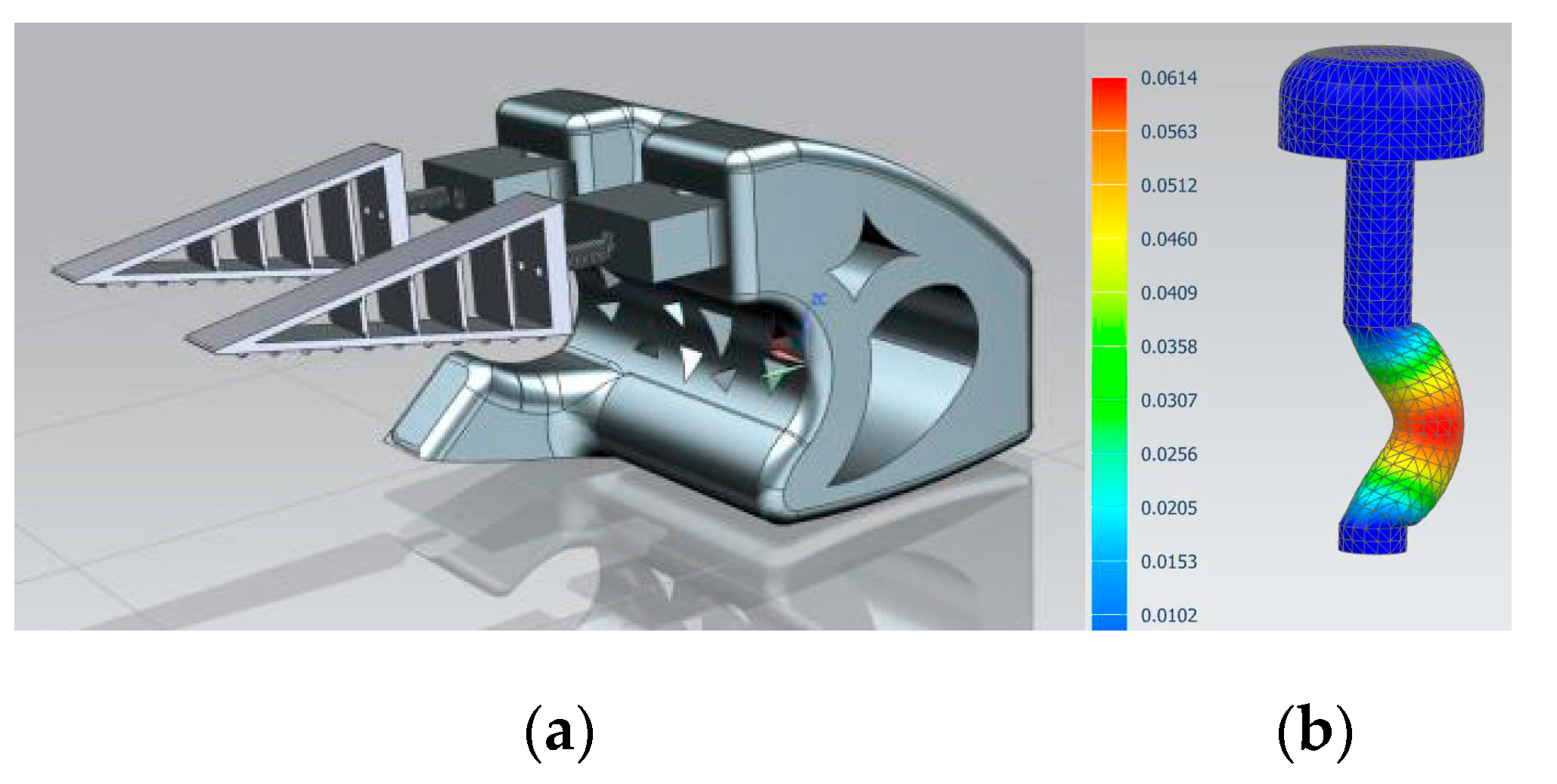
- Modeling and Simulation: The design was modeled in Fusion 360. FEM stress analysis was applied to validate mechanical performance, focusing on critical joints (Figure 5);
- 6.
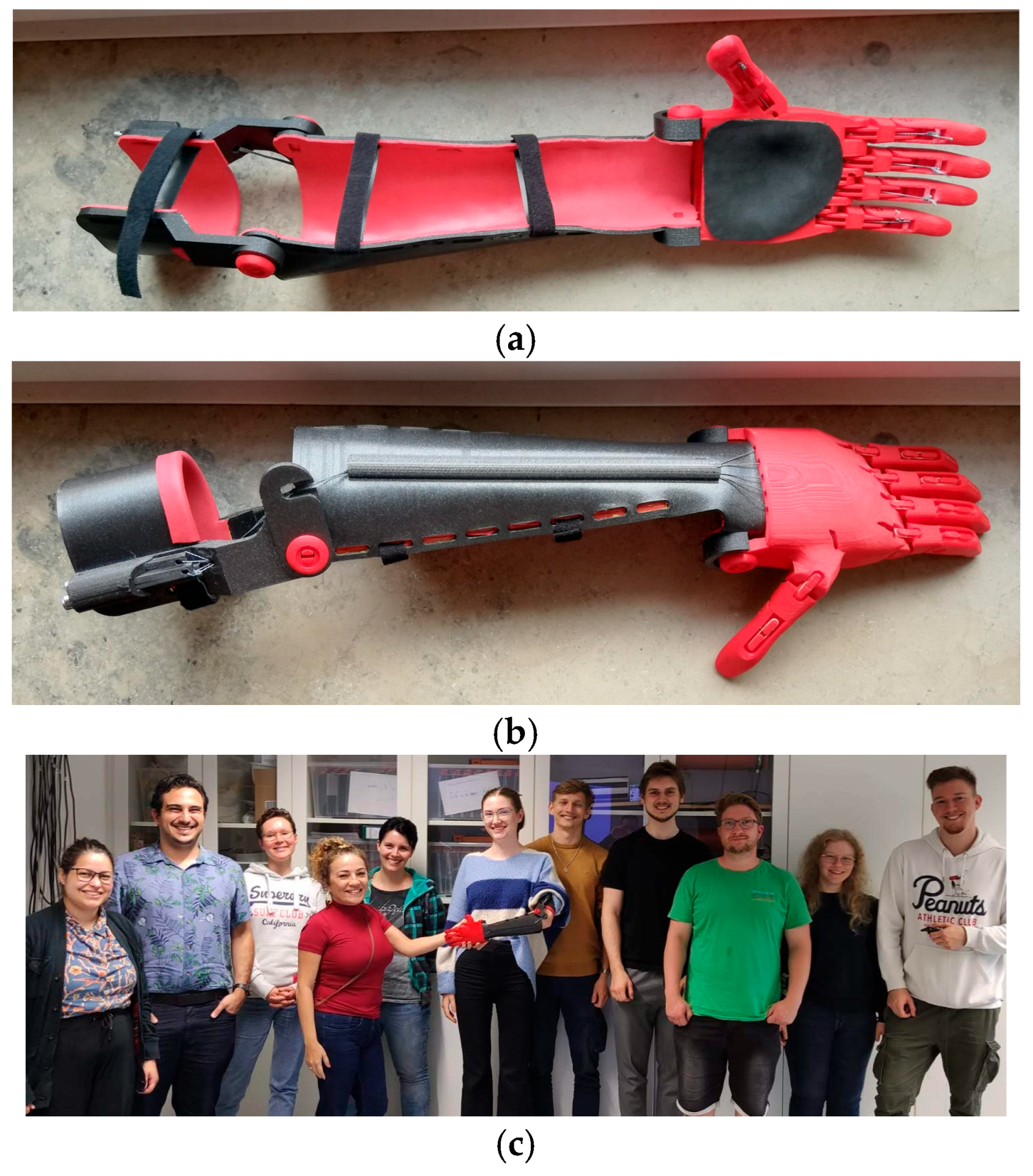
- Fabrication: The prototype was printed using a Prusa Mini printer. Articulated joints were manually assembled with embedded elastic elements (Figure 6).
- 7.
- Testing and Evaluation: The prosthesis was evaluated in simulated tasks (e.g., gripping a pen, holding a spoon). Iterations improved the return force and fit based on performance feedback;
- 8.
- Presentation and Reflection: In the final presentation, students demonstrated functionality and discussed lessons on alignment, iterative design, and adaptability. The process highlighted the educational value of connecting biomechanics with accessible prototyping tools.
3.3.2. Handy Solutions
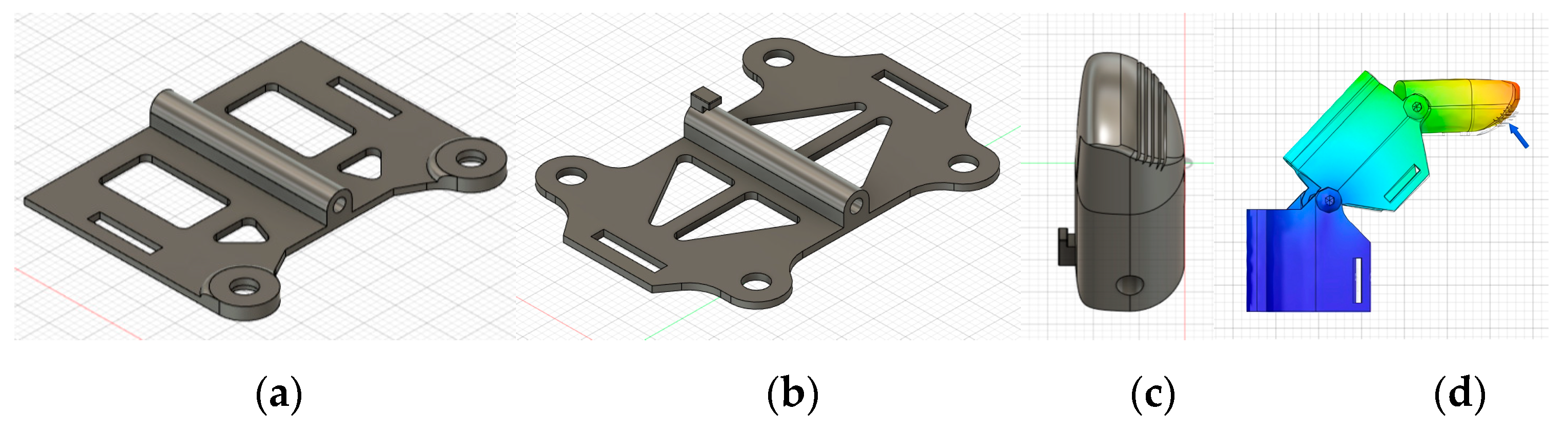
- Problem Definition: Finger amputations impact daily function and social inclusion. Commercial solutions are often expensive and lack personalization. The goal was to develop a functional, affordable, and customizable prosthesis for distal and intermediate phalanx loss;
- Biological Research: While not based on a specific animal model, the design was inspired by the tendon–muscle antagonism found in human anatomy. Fishing lines simulated flexor tendons, while rubber bands enabled extension, reproducing basic biomechanical function;
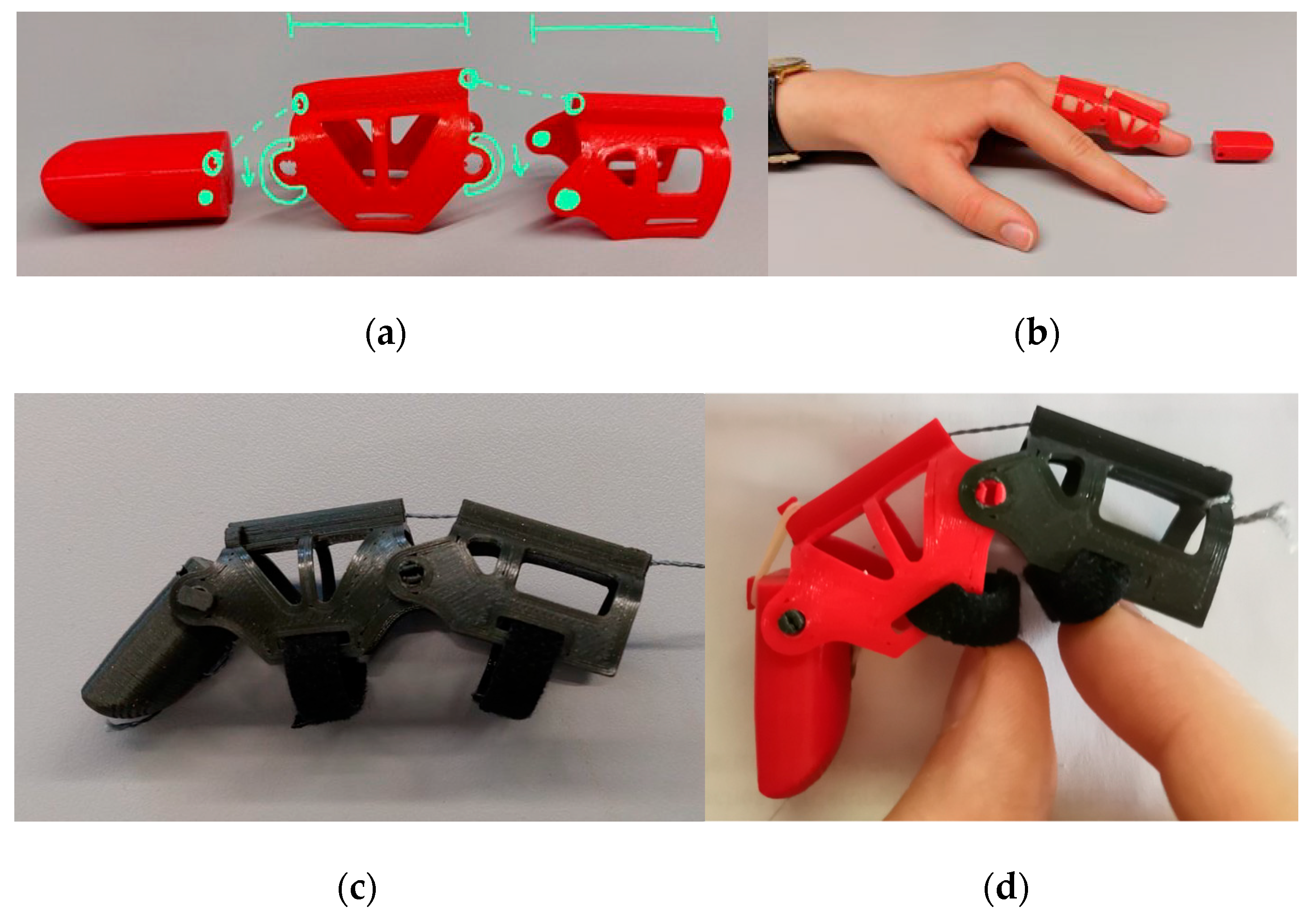
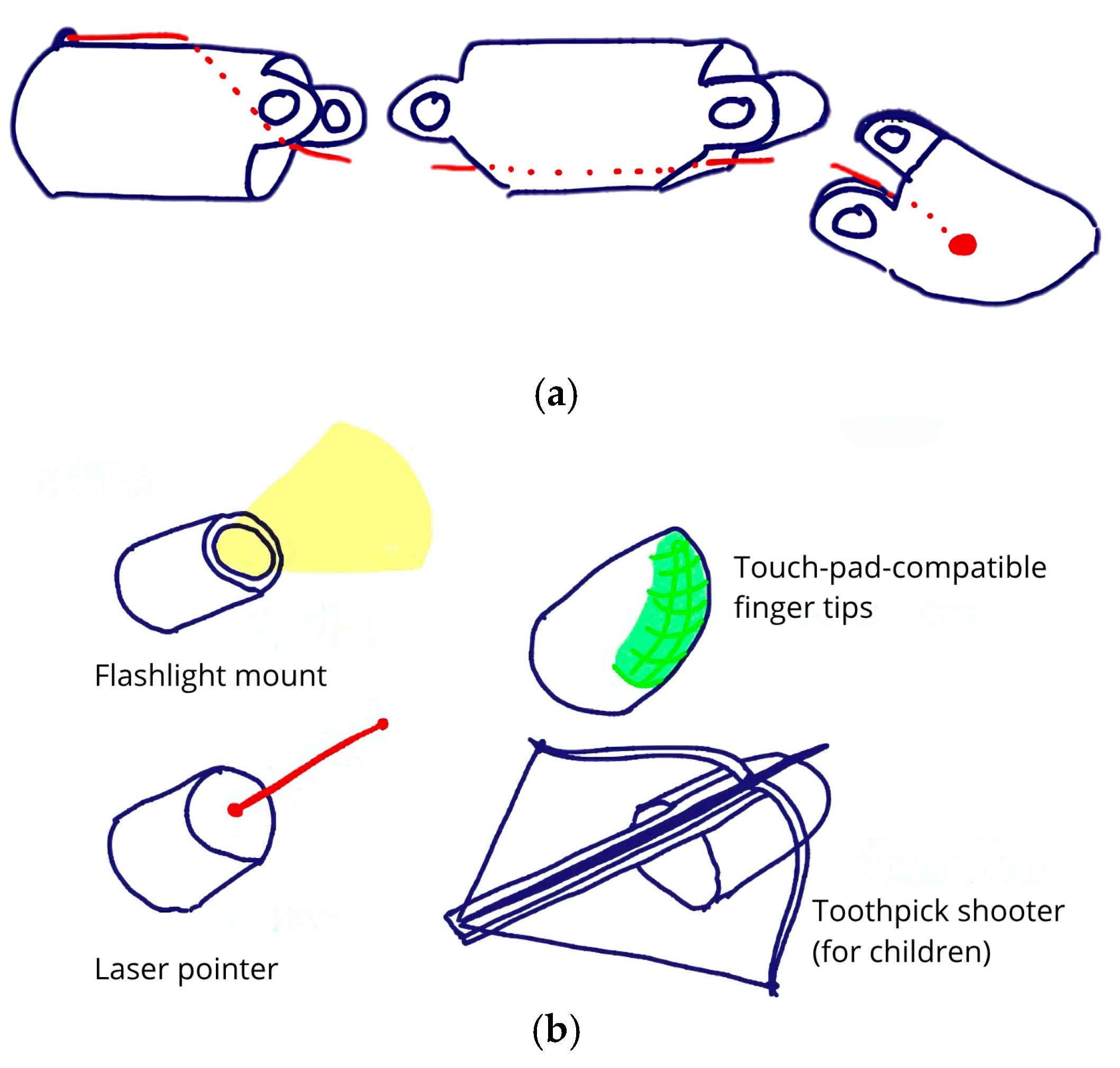
- Ideation: Initial sketches proposed a tendon-driven, modular prosthesis with simplified assembly and plug-in fingertip modules (Figure 7). Playful extensions, like a stylus or flashlight, supported engagement and personalization;
- 4.
- Decision-making: PLA was selected for its ease of printing, and brass rods were later added to reinforce joints after FEM analysis revealed shear stress issues. Simplicity and compatibility with desktop 3D printers were key decision factors;
- 5.
- Modeling and Simulation: Design iterations were modeled in Siemens NX. FEM simulations under a 10 N fingertip load identified critical stress regions in joint bolts, guiding adjustments to materials and geometry (Figure 8);
- 6.
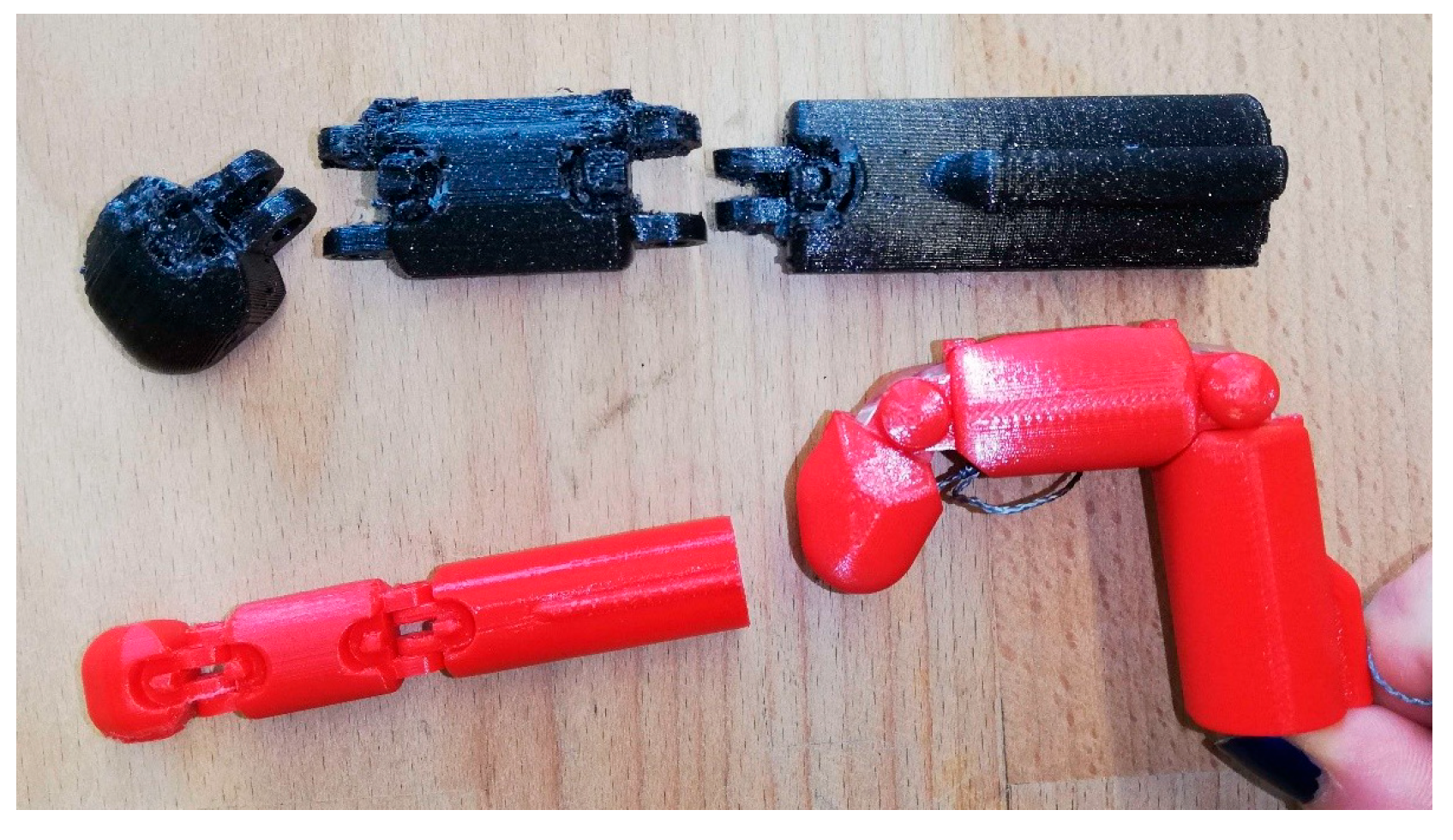
- Fabrication: Three prototypes were printed using Prusa Mini and Anycubic Chiron printers (Figure 9). Progressive iterations addressed tendon path scaling, joint dimensions, and printability. The final version integrated brass joints and improved articulation;
- 7.
- Testing and Evaluation: Prototypes were tested for movement, fit, and structural integrity. Key issues included hyperextension and poor phalanx synchronization. Redesigns refined the rubber band positioning, cap alignment, and joint performance;
- 8.
- Presentation and Reflection: The group presented their design journey, engineering decisions, and testing outcomes. Reflections addressed challenges in joint design and team coordination. Future directions include enhancing grip precision and refining modular attachments for broader user engagement.
3.3.3. Cervical Brace
- Problem Definition: Conventional cervical braces often cause discomfort and are difficult to apply. The project aimed to create a brace that reduces pressure points, allows better airflow, and is easier to wear independently—particularly for children;
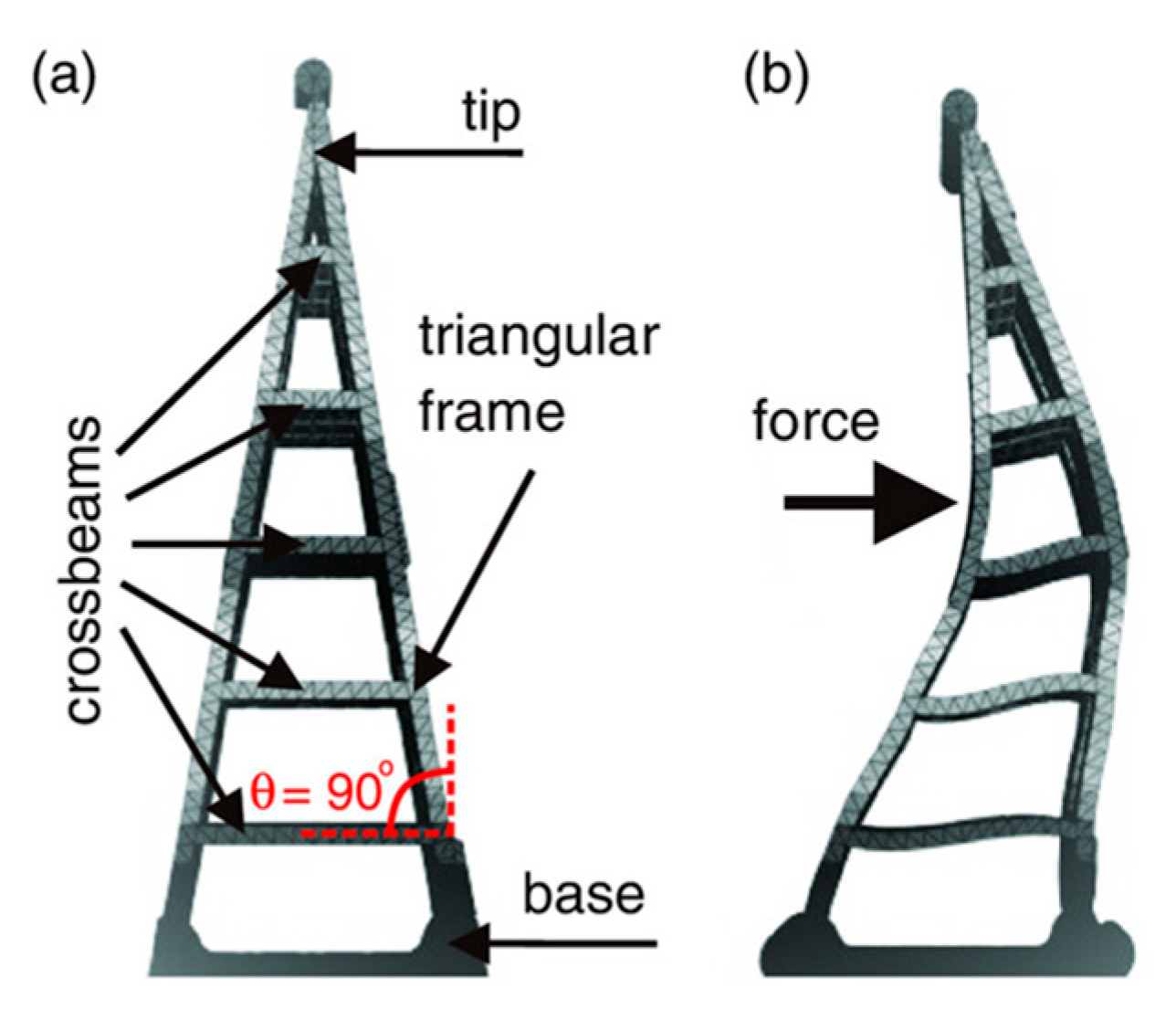
- Biological Research: Inspired by stingrays, the team adopted smooth, broad contact surfaces and curved forms to ensure even pressure distribution and flexibility, promoting both stability and comfort;
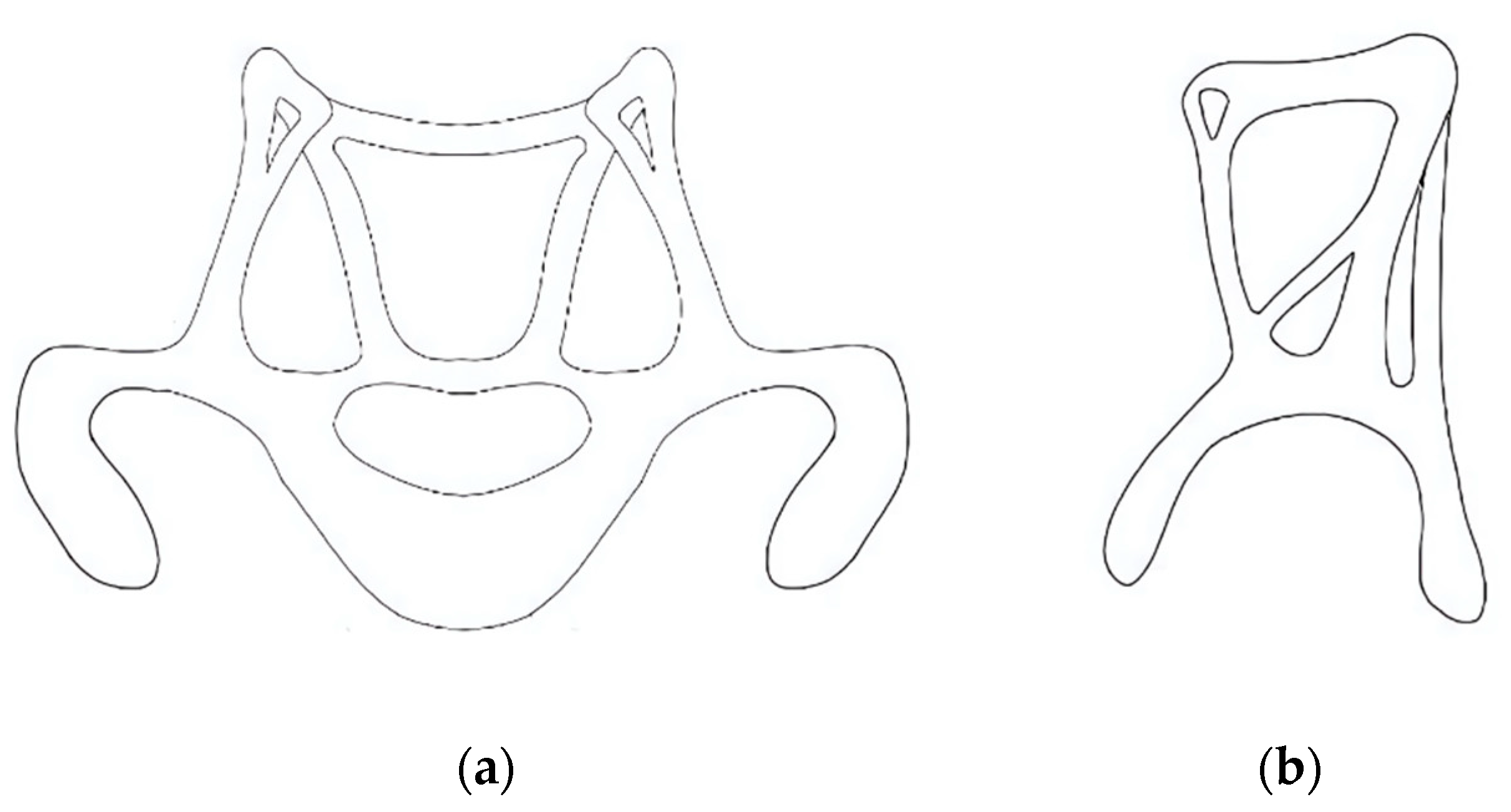
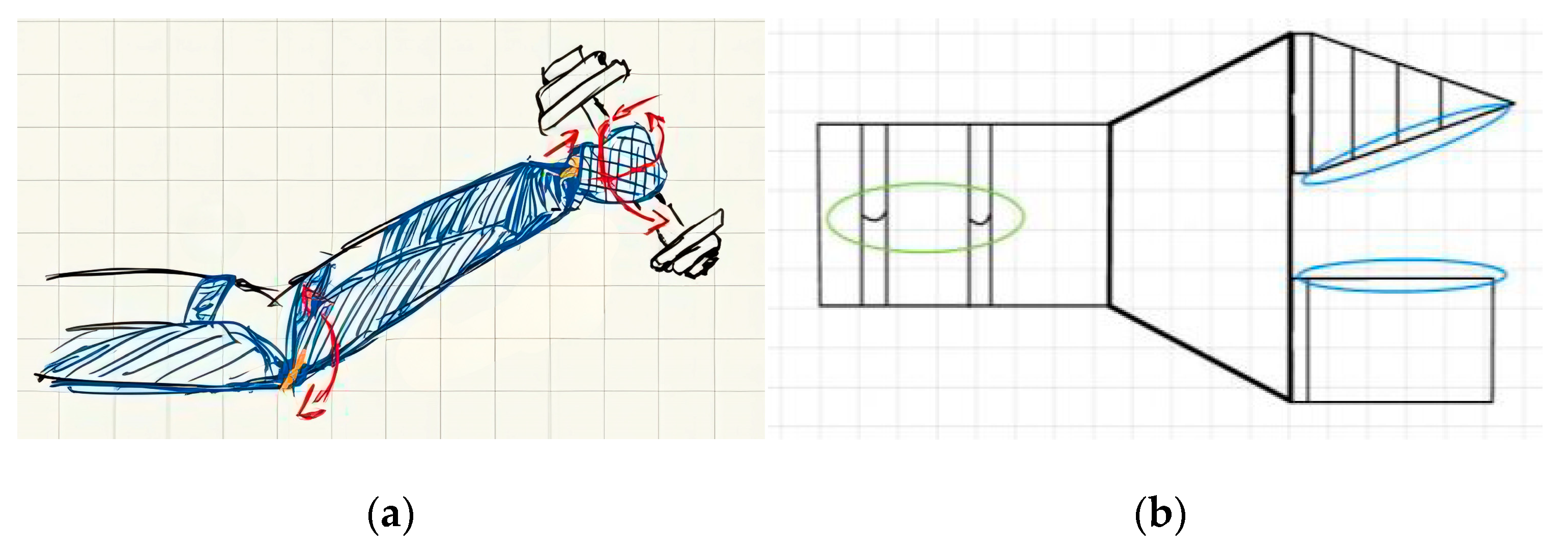
- Ideation: Initial sketches explored structural concepts emphasizing ventilation, ergonomic fit, and lightweight construction (Figure 10). Frontal and lateral views guided proportion decisions before digital modeling;
- 4.
- Decision-making: PLA was selected due to its printability and lab availability, prioritizing feasibility over material flexibility. Although alternatives like ABS or TPU offer improved mechanical properties, they were less compatible with the available open printers;
- 5.
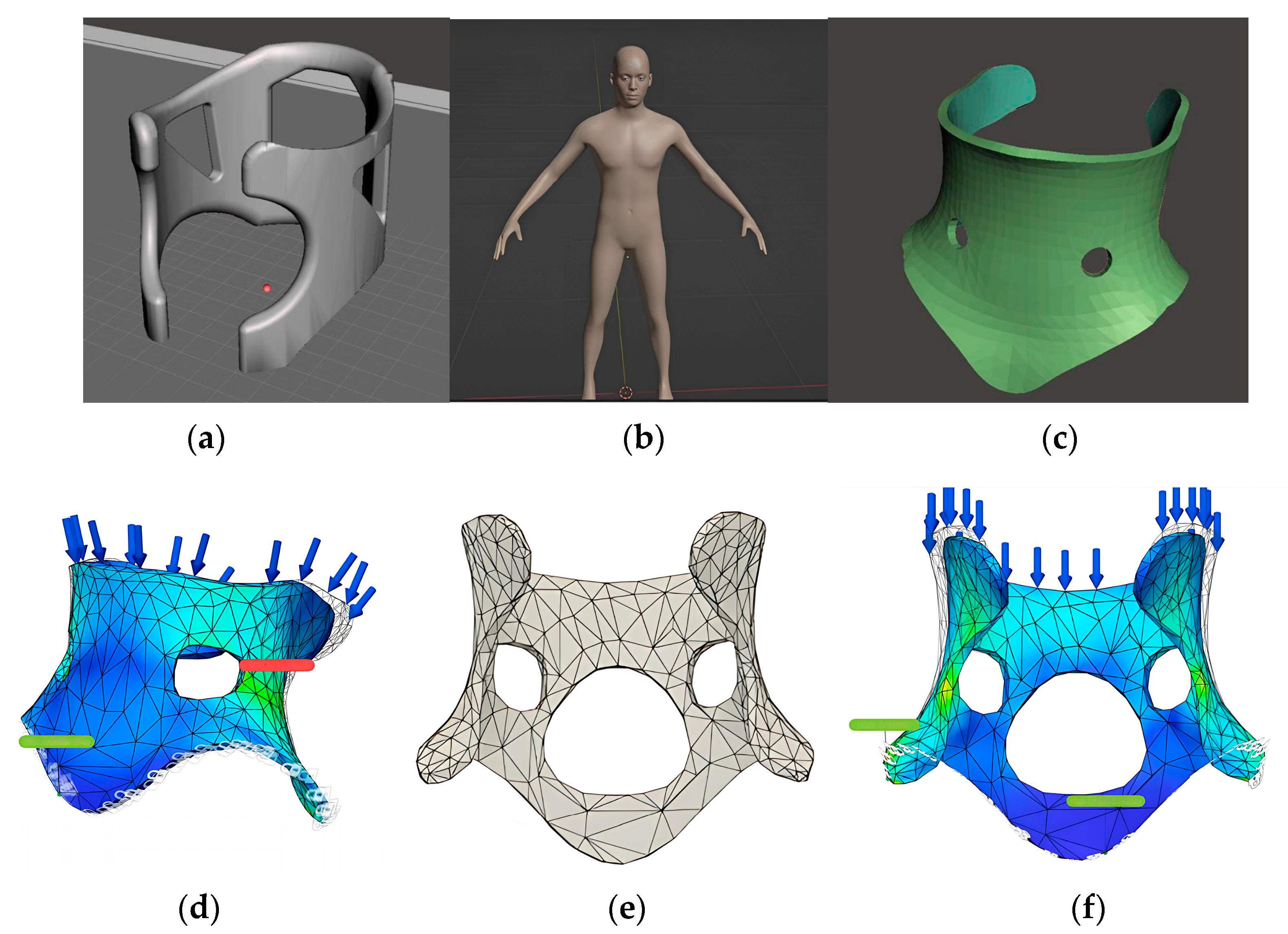
- Modeling and Simulation: The design process began with geometric primitives and evolved into an anatomically adapted model. A digital human mesh was created in MakeHuman and refined in Blender using sculpt tools. FEM analysis identified low-stress regions and enabled material reduction for improved ventilation without compromising strength (Figure 11);
- 6.
- Fabrication: The final model was printed in PLA using a Bambu Lab X1 Carbon with 14% infill and tree supports, completed in approximately 9 h with no post-processing required (Figure 12).
- 7.
- Testing and Evaluation: The orthosis was evaluated on both a digital model and a user with matching anthropometry (Figure 13). Assessments focused on fit, comfort, and restriction of cervical motion. Identified issues included excess pressure at the chin and limited ventilation;
- 8.
- Presentation and Reflection: The final presentation highlighted the brace’s ergonomic improvements and ease of application. Peer feedback emphasized the functional fit and esthetic quality. The team reflected on challenges such as anatomical variation and proposed future enhancements using thermoformable materials and adjustable closure systems.
3.3.4. Fin Ray-Inspired Hand Prosthesis
- Problem Definition: Low-cost prosthetic hands often lack grip adaptability, while high-end myoelectric models are expensive and complex. This project aimed to create an affordable, mechanically actuated hand capable of secure and adaptive grasping;
- Biological Research: The Fin Ray effect, observed in the tail fins of fish such as trout, allows flexible structures to bend toward applied forces. This principle informed the design of adaptive fingers that could conform to objects during grip (Figure 14).
- 3.
- Ideation: Initial sketches included a sport-specific prosthesis and embedded tools. The team later shifted toward a modular, general-purpose design incorporating Fin Ray geometry (Figure 15).
- 4.
- Decision-making: PLA was used for rigid components and TPU for the flexible fingers, balancing performance and printer compatibility. Several failed prints guided material selection and structural simplifications;
- 5.
- Modeling and Simulation: CAD models were developed in Siemens NX, evolving through three iterations. The final design included two adaptive fingers and a central support. FEM analysis simulated a 100 N load on connecting pins, guiding reinforcement (Figure 16);
- 6.
- Fabrication: Prototypes were printed using Prusa MK4 and Mini printers. While finger modules were successfully fabricated, full assembly was not completed due to design complexity and print failures;
- 7.
- Testing and Evaluation: Only partial testing was possible. Isolated components revealed issues with finger stability and assembly tolerance. The process underscored the challenges of translating bioinspired geometry into reliable low-cost prototypes;
- 8.
- Presentation and Reflection: In the final presentation, the team highlighted their design process, analytical work, and lessons learned. Despite the absence of a fully functional prototype, students reflected on the value of iterative modeling, material constraints, and simplifying complex ideas for feasible implementation.
3.4. Performance Evaluation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| CAD | Computer-Aided Design |
| CAE | Computer-Aided Engineering |
| CAM | Computer-Aided Manufacturing |
| DICOM | Digital Imaging and Communications in Medicine |
| FDM | Fused deposition modeling |
| FEM | Finite Element Method |
| FFF | Fused filament fabrication |
| LO&P3D | 3D Orthotics and Prosthetics Laboratory |
| PBL | Project-based learning |
| PLA | Polylactic Acid |
| TPU | Thermoplastic Polyurethane |
| UNIFESP | Federal University of São Paulo |
| WHS | Westfälische Hochschule |
References
- Vincent, J.F.V.; Bogatyreva, O.A.; Bogatyrev, N.R.; Bowyer, A.; Pahl, A.-K. Biomimetics: Its Practice and Theory. J. R. Soc. Interface 2006, 3, 471–482. [Google Scholar] [CrossRef] [PubMed]
- Domingos Dias, W.; Soares, J.H.; Corrêa Guimarães, L.; Espinosa Martínez, N.; Ramos Luz, T.; da Costa Soares Sousa Lima, Y.M.; Huebner, R. Exploring Additive Manufacturing in Assistive Technologies to Transform the Educational Experience: Empowering Inclusion. J. Complex. Health Sci. 2024, 7, 81–94. [Google Scholar] [CrossRef]
- Mukhametzyanova, A.; Smirnova, L.; Bronskaya, V.; Kharitonova, O. Additive Manufacturing Is as an Important Component of Innovative Engineering Education. In Proceedings of the II International Scientific Conference on Advances in Science, Engineering and Digital Education (ASEDU-II 2021), Krasnoyarsk, Russia, 28 October 2021; p. 030023. [Google Scholar]
- Bar-Cohen, Y. Biomimetics: Biologically Inspired Technologies; CRC Press: Boca Raton, FL, USA, 2005; ISBN 978084933163. [Google Scholar]
- Bhushan, B. Biomimetics: Lessons from Nature–an Overview. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2009, 367, 1445–1486. [Google Scholar] [CrossRef] [PubMed]
- Arena, P.; Bucolo, M.; Buscarino, A.; Fortuna, L.; Frasca, M. Reviewing Bioinspired Technologies for Future Trends: A Complex Systems Point of View. Front. Phys. 2021, 9, 750090. [Google Scholar] [CrossRef]
- López, M.; Persa, M. Nature as Inspiration in Learning Processes. In Biology, Biomimetics and Natural Design; Springer: Cham, Switzerland, 2024; pp. 101–125. [Google Scholar]
- Fattepur, G.; Patil, A.Y.; Kumar, P.; Kumar, A.; Hegde, C.; Siddhalingeshwar, I.G.; Kumar, R.; Khan, T.M.Y. Bio-Inspired Designs: Leveraging Biological Brilliance in Mechanical Engineering—An Overview. 3 Biotech 2024, 14, 312. [Google Scholar] [CrossRef]
- Ngo, T.D.; Kashani, A.; Imbalzano, G.; Nguyen, K.T.Q.; Hui, D. Additive Manufacturing (3D Printing): A Review of Materials, Methods, Applications and Challenges. Compos. B Eng. 2018, 143, 172–196. [Google Scholar] [CrossRef]
- Praveena, B.A.; Lokesh, N.; Abdulrajak, B.; Santhosh, N.; Praveena, B.L.; Vignesh, R. A Comprehensive Review of Emerging Additive Manufacturing (3D Printing Technology): Methods, Materials, Applications, Challenges, Trends and Future Potential. Mater. Today Proc. 2022, 52, 1309–1313. [Google Scholar] [CrossRef]
- Mahmood, A.; Akram, T.; Chen, H.; Chen, S. On the Evolution of Additive Manufacturing (3D/4D Printing) Technologies: Materials, Applications, and Challenges. Polymers 2022, 14, 4698. [Google Scholar] [CrossRef]
- Mamo, H.B.; Adamiak, M.; Kunwar, A. 3D Printed Biomedical Devices and Their Applications: A Review on State-of-the-Art Technologies, Existing Challenges, and Future Perspectives. J. Mech. Behav. Biomed. Mater. 2023, 143, 105930. [Google Scholar] [CrossRef]
- Husainy, A.S.N.; Patil, S.D.; Kokane, R.S.; Upadhye, C.R.; Chougule, A.V. Medical Additive Manufacturing: Challenges and Features. Asian Rev. Mech. Eng. 2023, 12, 15–23. [Google Scholar] [CrossRef]
- Salmi, M. Additive Manufacturing Processes in Medical Applications. Materials 2021, 14, 191. [Google Scholar] [CrossRef] [PubMed]
- Bastin, A.; Huang, X. Progress of Additive Manufacturing Technology and Its Medical Applications. ASME Open J. Eng. 2022, 1, 010802. [Google Scholar] [CrossRef]
- Ventola, C.L. Medical Applications for 3D Printing: Current and Projected Uses. Pharm. Ther. 2014, 39, 704–711. [Google Scholar]
- Javaid, M.; Haleem, A. Additive Manufacturing Applications in Medical Cases: A Literature Based Review. Alex. J. Med. 2018, 54, 411–422. [Google Scholar] [CrossRef]
- Rorato, E.K.; do Nascimento Silva, P.P.; Kunkel, M.E. Kwawu Passiva Estético-Funcional: Remix de Uma Prótese Open-Source de Membro Superior Transradial Manufaturada Por Impressão 3D. Hum. Factors Des. 2023, 12, 149–155. [Google Scholar] [CrossRef]
- De Vivo Nicoloso, L.G.; Pelz, J.; Barrack, H.; Kuester, F. Towards 3D Printing of a Monocoque Transtibial Prosthesis Using a Bio-Inspired Design Workflow. Rapid Prototyp. J. 2021, 27, 67–80. [Google Scholar] [CrossRef]
- Kunkel, M.E.; Araújo, A.C.C.P.S. Narrative Review on the Application of Additive Manufacturing in the Production of Upper Limb Orthoses. In Current Trends in Biomedical Engineering; Springer International Publishing: Cham, Switzerland, 2023; pp. 61–77. [Google Scholar]
- Popescu, D.; Lăptoiu, D.; Căruțașu, N.L. Considerations on the Design, Printability and Usability of Customized 3D-Printed Upper Limb Orthoses. Appl. Sci. 2024, 14, 6157. [Google Scholar] [CrossRef]
- Thomann, G.; de Carvalho, V.A. Personalized Upper Limb Orthosis Necessitates Variety of Tools during the Development Process: Hemiplegic Child Case Study. Disabil. Rehabil. Assist. Technol. 2021, 16, 188–195. [Google Scholar] [CrossRef]
- Fernandes da Silva, J.L.G.; Barroso Gonçalves, S.M.; Plácido da Silva, H.H.; Tavares da Silva, M.P. Three-Dimensional Printed Exoskeletons and Orthoses for the Upper Limb—A Systematic Review. Prosthet. Orthot. Int. 2024, 48, 590–602. [Google Scholar] [CrossRef]
- Zuniga, J.; Katsavelis, D.; Peck, J.; Stollberg, J.; Petrykowski, M.; Carson, A.; Fernandez, C. Cyborg Beast: A Low-Cost 3d-Printed Prosthetic Hand for Children with Upper-Limb Differences. BMC Res. Notes 2015, 8, 10. [Google Scholar] [CrossRef]
- Cabibihan, J.-J.; Alkhatib, F.; Mudassir, M.; Lambert, L.A.; Al-Kwifi, O.S.; Diab, K.; Mahdi, E. Suitability of the Openly Accessible 3D Printed Prosthetic Hands for War-Wounded Children. Front. Robot. AI 2021, 7, 594196. [Google Scholar] [CrossRef] [PubMed]
- Wendo, K.; Barbier, O.; Bollen, X.; Schubert, T.; Lejeune, T.; Raucent, B.; Olszewski, R. Open-Source 3D Printing in the Prosthetic Field—The Case of Upper Limb Prostheses: A Review. Machines 2022, 10, 413. [Google Scholar] [CrossRef]
- Stephens-Fripp, B.; Jean Walker, M.; Goddard, E.; Alici, G. A Survey on What Australians with Upper Limb Difference Want in a Prosthesis: Justification for Using Soft Robotics and Additive Manufacturing for Customized Prosthetic Hands. Disabil. Rehabil. Assist. Technol. 2020, 15, 342–349. [Google Scholar] [CrossRef]
- Gགྷrski, F.; Zawadzki, P.; Wichniarek, R.; Kuczko, W.; Slupińska, S.; Żukowska, M. Automated Design and Rapid Manufacturing of Low-Cost Customized Upper Limb Prostheses. J. Phys. Conf. Ser. 2022, 2198, 012040. [Google Scholar] [CrossRef]
- Stramandinoli-Zanicotti, R.T.; Corso, P.F.; Kunkel, M.E. Maxillofacial Prostheses: Assistive Technology in Mutilated Facial Patients. In Personalized Orthopedics; Springer International Publishing: Cham, Switzerland, 2022; pp. 355–371. [Google Scholar]
- Powell, S.K.; Cruz, R.L.J.; Ross, M.T.; Woodruff, M.A. Past, Present, and Future of Soft-Tissue Prosthetics: Advanced Polymers and Advanced Manufacturing. Adv. Mater. 2020, 32, 2001122. [Google Scholar] [CrossRef]
- Savsani, S.; Singh, S.; Mali, H.S. Additive Manufacturing for Prostheses Development: State of the Art. Rapid Prototyp. J. 2023, 29, 741–765. [Google Scholar] [CrossRef]
- Leme, J.C.; de Oliveira Spinosa, R.M.; Leal, S.O.; Hirsch, A.B.B.; Lodovico, A.; Stramandinoli-Zanicotti, R.T.; Kunkel, M.E.; Moura, F.A. Development of Low-Cost and Personalized External Silicone Breast Prosthesis Produced by Additive Manufacturing for Women Who Have Undergone Mastectomy: A Pilot Study. Clin. Biomech. 2023, 110, 106123. [Google Scholar] [CrossRef]
- Simpson, A.C.; Taliaferro, A.R. Designing Inclusion: Using 3D Printing to Maximize Adapted Physical Education Participation. Teach. Except. Child. 2021, 54, 26–35. [Google Scholar] [CrossRef]
- Lotoshynska, N.; Popova, S.; Irianto, I.; Jamil Alsayaydeh, J.A. An Approach towards the Development of an Inclusive Subject Environment Using Additive Manufacturing Technologies. Int. J. Electr. Comput. Eng. 2024, 14, 4248. [Google Scholar] [CrossRef]
- Bleau, M.; Jaiswal, A.; Holzhey, P.; Wittich, W. Applications of Additive Manufacturing, or 3D Printing, in the Rehabilitation of Individuals With Deafblindness: A Scoping Study. Sage Open 2022, 12. [Google Scholar] [CrossRef]
- Fazan, L.H. Accessible Innovation: The Design and Application of 3d Printed Computer Peripherals for Individuals with Upper Limb Limitations. Master’s Thesis, Interdisciplinary Professional Master’s Degree Program in Technological Innovation, Federal University of Sao Paulo, São José dos Campos, Brazil, 2024. [Google Scholar]
- Golecki, H.M.; Robinson, J.; Cvetkovic, C.; Walsh, C. Empowering Students in Medical Device Design: An Interdisciplinary Soft Robotics Course. Biomed. Eng. Educ. 2024, 4, 399–408. [Google Scholar] [CrossRef]
- Withana, A. Co-Designing Personalized Assistive Devices Using Personal Fabrication. Commun. ACM 2023, 66, 89–90. [Google Scholar] [CrossRef]
- World Health Organization. Global Report on Assistive Technology; World Health Organization: Geneva, Switzerland, 2022. [Google Scholar]
- Fu, K.; Moreno, D.; Yang, M.; Wood, K.L. Bio-Inspired Design: An Overview Investigating Open Questions from the Broader Field of Design-by-Analogy. J. Mech. Des. 2014, 136, 111102. [Google Scholar] [CrossRef]
- Shashwat, S.; Zingre, K.T.; Thurairajah, N.; Kumar, D.K.; Panicker, K.; Anand, P.; Wan, M.P. A Review on Bioinspired Strategies for an Energy-Efficient Built Environment. Energy Build. 2023, 296, 113382. [Google Scholar] [CrossRef]
- Barley, W.C.; Ruge-Jones, L.; Wissa, A.; Suarez, A.V.; Alleyne, M. Addressing Diverse Motivations to Enable Bioinspired Design. Integr. Comp. Biol. 2022, 62, 1192–1201. [Google Scholar] [CrossRef]
- Pleasant, D.; Gavin, C.; Redden, G.; Nagel, J.; Zhang, H. Bioinspired Design of Material Architecture for Additive Manufacturing. Machines 2023, 11, 1081. [Google Scholar] [CrossRef]
- Ranger, B.J.; Mantzavinou, A. Design Thinking in Development Engineering Education: A Case Study on Creating Prosthetic and Assistive Technologies for the Developing World. Dev. Eng. 2018, 3, 166–174. [Google Scholar] [CrossRef]
- Cheva, E. Group Design Rotation in Engineering Education: Impacting Student Participation and Collaboration. Voices Reform 2023, 6, 14–22. [Google Scholar] [CrossRef]
- Mehlich, J. Technology Assessment in the STEM Curriculum: Teaching Responsible Research and Innovation Skills to Future Innovators. TATuP-Z. Tech. Theor. Praxis 2022, 31, 22–27. [Google Scholar] [CrossRef]
- Prabhu, R.; Simpson, T.W.; Miller, S.R.; Cutler, S.L.; Meisel, N.A. Teaching Designing for Additive Manufacturing: Formulating Educational Interventions That Encourage Design Creativity. 3D Print. Addit. Manuf. 2023, 10, 356–372. [Google Scholar] [CrossRef]
- Egan, P.F. Design for Additive Manufacturing: Recent Innovations and Future Directions. Designs 2023, 7, 83. [Google Scholar] [CrossRef]
- Jacobs, S.; Eggermont, M.; Helms, M.; Wanieck, K. The Education Pipeline of Biomimetics and Its Challenges. Biomimetics 2022, 7, 93. [Google Scholar] [CrossRef] [PubMed]
- Speck, O.; Speck, T. Biomimetics and Education in Europe: Challenges, Opportunities, and Variety. Biomimetics 2021, 6, 49. [Google Scholar] [CrossRef] [PubMed]
- Gralow, M.; Weigand, F.; Herzog, D.; Wischeropp, T.; Emmelmann, C. Biomimetic Design and Laser Additive Manufacturing—A Perfect Symbiosis? J. Laser Appl. 2020, 32, 021201. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, X.; Chen, Z.; Wang, Z.; Liu, C.; Park, K. Charting the Path of Technology-Integrated Competence in Industrial Design during the Era of Industry 4.0. Sustainability 2024, 16, 751. [Google Scholar] [CrossRef]
- Stern, A.; Rosenthal, Y.; Dresler, N.; Ashkenazi, D. Additive Manufacturing: An Education Strategy for Engineering Students. Addit. Manuf. 2019, 27, 503–514. [Google Scholar] [CrossRef]
- Phan, M.-H.; Ngo, H.Q.T. A Multidisciplinary Mechatronics Program: From Project-Based Learning to a Community-Based Approach on an Open Platform. Electronics 2020, 9, 954. [Google Scholar] [CrossRef]
- Long, J.; Dragich, E.; Saterbak, A. Problem-Based Learning Impacts Students’ Reported Learning and Confidence in an Undergraduate Biomedical Engineering Course. Biomed. Eng. Educ. 2022, 2, 209–232. [Google Scholar] [CrossRef]
- Lai, L.; Guo, F. Creating Lifelong Learners: Using Project-Based Management to Teach 21st Century Skills. Innov. Educ. Teach. Int. 2018, 55, 1–2. [Google Scholar] [CrossRef]
- Fan, H.; Xie, H.; Feng, Q.; Bonizzoni, E.; Heidari, H.; McEwan, M.P.; Ghannam, R. Interdisciplinary Project-Based Learning: Experiences and Reflections from Teaching Electronic Engineering in China. IEEE Trans. Educ. 2023, 66, 73–82. [Google Scholar] [CrossRef]
- Lavado-Anguera, S.; Velasco-Quintana, P.J.; Terrón-López, M.J. Project-Based Learning (PBL) as an Experiential Pedagogical Methodology in Engineering Education: A Review of the Literature. Educ. Sci. 2024, 14, 617. [Google Scholar] [CrossRef]
- Song, Y. Analysis on Existing Project-Based Learning Application in Various Education Levels and Technology- Integrated Project-Based Learning. Lect. Notes Educ. Psychol. Public Media 2023, 2, 447–454. [Google Scholar] [CrossRef]
- Tarakova, B. Model for Project-Based Training at the Intersection Point of General and Vocational Education. Vocat. Educ. 2022, 24, 49–62. [Google Scholar] [CrossRef]
- Konu Kadirhanogullari, M.; Ozay Kose, E. Project-Based Learning in Science Education: A Bibliometric Network Analysis. Int. J. Stud. Educ. 2023, 6, 85–108. [Google Scholar] [CrossRef]
- Mao3D Program. Available online: https://www.mao3d.com.br/ (accessed on 3 April 2025).
- Sauer, A.; Beismann, H.; Jäger, M.; Hamm, C. Bionik in der Strukturoptimierung: Praxishandbuch für Ressourceneffizienten Leichtbau; Vogel Communications Group: Würzburg, Germany, 2018; ISBN 978-3-8343-3381-0. [Google Scholar]
- Unlimbited Arm v2.1. Available online: https://hub.e-nable.org/p/devices?p=Unlimbited+Arm+v2.1 (accessed on 3 April 2025).
- E-NABLE Community. Enabling the Future. About Us. Available online: https://enablingthefuture.org/about/ (accessed on 12 May 2025).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Software | Purpose |
|---|---|---|
| CAD | TinkerCAD (v.2023) | Basic parametric 3D modeling |
| Fusion 360 (v.2023) | Parametric design and mechanical assemblies | |
| Siemens NX (v.2306) | High-level CAD modeling and FEM preparation | |
| Blender (v.3.6 LTS) | Organic modeling and sculpting for anatomical fit | |
| Meshmixer (v.3.5.474) | Mesh editing and adjustments of anatomical parts | |
| MakeHuman (v.1.2.0) | Generation of human body models | |
| 3D Slicer (v.5.2.2) | Anatomical biomodels from medical imaging | |
| OpenSCAD (v.2021.01) | Parametric modeling using code-based scripts | |
| CAE | Fusion 360 Simulation (v.2023) | Structural and mechanical analysis of components |
| ANSYS (v.2023 R2) | FEM simulations for validation | |
| Siemens NX (v.2306) | FEA simulations for advanced validation | |
| CAM | Ultimaker Cura (v.5.4) | Slicing and print setup for 3D printers |
| PrusaSlicer (v.2.6.0) | Alternative slicing tool for 3D printers |
| Printer | Manufacturer (Country) | Build Volume (mm) |
|---|---|---|
| Prusa MK3S | Prusa Research (Czech Republic) | 250 × 210 × 210 |
| Prusa MK3 | 250 × 210 × 210 | |
| Prusa Mini | 180 × 180 × 180 | |
| Anycubic Chiron | Anycubic (China) | 450 × 400 × 380 |
| Bambu Lab X1 Carbon | Bambu Lab (China) | 256 × 256 × 256 |
| Step | Phase | Description |
|---|---|---|
| 1 | Problem definition | Problem identification and user needs analysis |
| 2 | Biological research | Research and selection of biological analogies |
| 3 | Ideation | Ideation of the assistive device using semantic panels and design tools |
| 4 | Decision-making | Decision matrix for material selection and concept feasibility |
| 5 | Modeling and simulation | 3D modeling and mechanical simulation using FEM |
| 6 | Fabrication | Digital fabrication using FFF 3D printing |
| 7 | Testing and evaluation | User scenario simulation using AI-based contextual analysis |
| 8 | Presentation and reflection | Final presentation and peer reflection |
| Project Title | Type | Members | Biomimetic Inspiration |
|---|---|---|---|
| Finger Prosthesis for Musician | Prosthesis | 3 | Bird phalanges |
| Handy Solutions | Orthosis | 2 | Tendon–muscle antagonism |
| Cervical Brace | Orthosis | 4 | Stingray form |
| Fin Ray-Inspired Hand | Prosthesis | 4 | Fin Ray effect (fish fins) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kunkel, M.E.; Sauer, A.; Isaacs, C.; Ganga, T.A.F.; Fazan, L.H.; Keller Rorato, E. Teaching Bioinspired Design for Assistive Technologies Using Additive Manufacturing: A Collaborative Experience. Biomimetics 2025, 10, 391. https://doi.org/10.3390/biomimetics10060391
Kunkel ME, Sauer A, Isaacs C, Ganga TAF, Fazan LH, Keller Rorato E. Teaching Bioinspired Design for Assistive Technologies Using Additive Manufacturing: A Collaborative Experience. Biomimetics. 2025; 10(6):391. https://doi.org/10.3390/biomimetics10060391
Chicago/Turabian StyleKunkel, Maria Elizete, Alexander Sauer, Carlos Isaacs, Thabata Alcântara Ferreira Ganga, Leonardo Henrique Fazan, and Eduardo Keller Rorato. 2025. "Teaching Bioinspired Design for Assistive Technologies Using Additive Manufacturing: A Collaborative Experience" Biomimetics 10, no. 6: 391. https://doi.org/10.3390/biomimetics10060391
APA StyleKunkel, M. E., Sauer, A., Isaacs, C., Ganga, T. A. F., Fazan, L. H., & Keller Rorato, E. (2025). Teaching Bioinspired Design for Assistive Technologies Using Additive Manufacturing: A Collaborative Experience. Biomimetics, 10(6), 391. https://doi.org/10.3390/biomimetics10060391