
Head Gesture Recognition Combining Activity Detection and Dynamic Time Warping


Abstract
1. Introduction
2. Related Work
2.1. Applications of Head Motion Recognition
2.2. Methods for Head Motion Recognition
3. Material and Methods
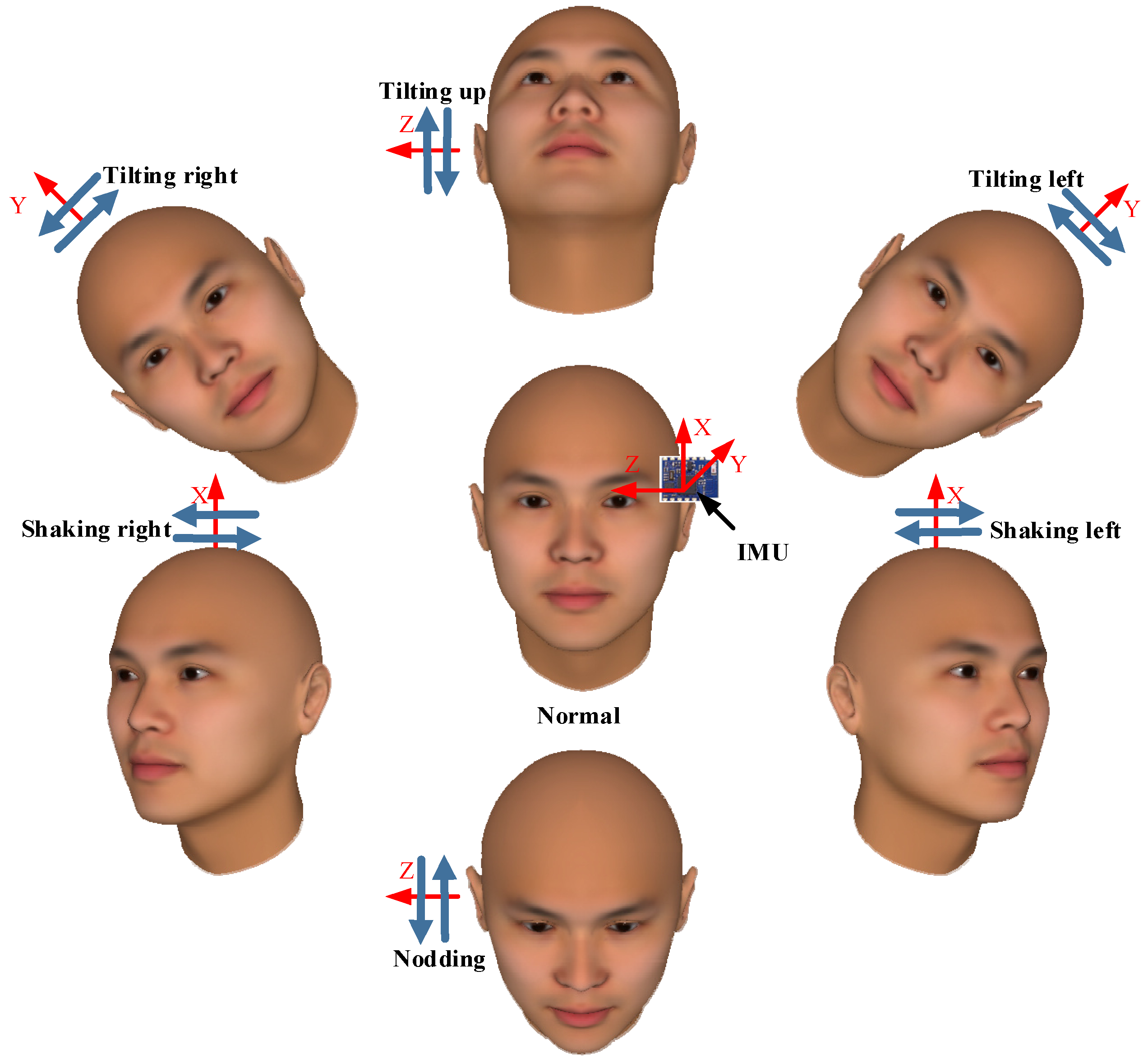
3.1. Data Acquisition
3.2. Activity Detection for Head Gestures
- (1)
- Data normalizationwhere is the normalized data, and is the collected acceleration and angular velocity data from the sensor.
- (2)
- Sliding median filteringwhere l is the length of the filter; represents an odd number, and is the median; represents an even number, and is the average of the two middle values. The purpose of median filtering is to reduce the salt-and-pepper noise of the sensor and to reduce the possibility of misjudgment in subsequent action recognitions and endpoint detections.
- (3)
- Determining the start time of head movementswhere is the overall description of the angular velocity variation, reflecting the overall degree of change in the angle of head movements. and represent the angular velocity components on the three-dimensional coordinate axes. is the threshold for detecting the start of head movements. is the moment when a head movement starts.
- (4)
- Determining the end time of head movementswhere is a threshold used to determine if a movement has truly ended. Please refer to Figure 2 for details. When the first peak of the head movement ends, the movement is halfway completed. Therefore, it is necessary for the threshold to cross this trough in order to capture the entire waveform of the head movement. Additionally, this threshold also serves as the minimum interval between two consecutive head movements, and represents the moment when the head movement ends.
- (5)
- Determining the validity of head movementswhere is the small duration of the movement used to filter out sharp peak noise in the waveform, and is the maximum duration of the movement used to exclude movements with abnormal or incomplete durations.
3.3. Head Gesture Recognition Using the DTW Method
- (1)
- Calculating time series templates for head movements
- (2)
- Calculating Euclidean distance matrix
- (3)
- Finding the warping path
- (4)
- Solving the optima warping path
- (5)
- Determining the type of head movement
4. Experimental Results and Discussion
4.1. Experimental Platform
4.2. Selection of Endpoint Detection Parameters
4.3. An Analysis of the Recognition Effectiveness of the DTW Algorithm
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ionut-Cristian, S.; Dan-Marius, D. Using Inertial Sensors to Determine Head Motion—A Review. J. Imaging 2021, 7, 265. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Li, D.; Wang, X.; Liu, L.; Zhang, Z.; Subramanian, S. Precise head pose estimation on HPD5A database for attention recognition based on convolutional neural network in human-computer interaction. Infrared Phys. Technol. 2021, 116, 103740. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Y. Nod to Auth: Fluent AR/VR Authentication with User Head-Neck Modeling. In Proceedings of the 2021 Conference on Human Factors in Computing Systems, Virtual, 8–13 May 2021. [Google Scholar]
- Rudigkeit, N.; Gebhard, M. AMiCUS—A Head Motion-Based Interface for Control of an Assistive Robot. Sensors 2019, 19, 2836. [Google Scholar] [CrossRef] [PubMed]
- Ju, J.; Zheng, H.; Li, C.; Li, X.; Liu, H.; Liu, T. AGCNNs: Attention-guided convolutional neural networks for infrared head pose estimation in assisted driving system. Infrared Phys. Technol. 2022, 123, 104146. [Google Scholar] [CrossRef]
- Li, Z.; Fu, Y.; Yuan, J.; Huang, T.S.; Wu, Y. Query Driven Localized Linear Discriminant Models for Head Pose Estimation. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007. [Google Scholar]
- Mbouna, R.O.; Kong, S.G.; Chun, M.G. Visual Analysis of Eye State and Head Pose for Driver Alertness Monitoring. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1462–1469. [Google Scholar] [CrossRef]
- Koniaris, B.; Huerta, I.; Kosek, M.; Darragh, K.; Malleson, C.; Jamrozy, J.; Swafford, N.; Guitian, J.; Moon, B.; Israr, A.; et al. IRIDiuM: Immersive rendered interactive deep media. In Proceedings of the 43rd Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 2016, Anaheim, CA, USA, 24–28 July 2016; ACM Special Interest Group on Computer Graphics and Interactive Techniques (SIGGRAPH): Los Angeles, CA, USA, 2016. [Google Scholar]
- Xu, Y.; Jung, C.; Chang, Y. Head Pose Estimation Using Deep Neural Networks and 3D Point Cloud. Pattern Recognit. 2021, 121, 108210. [Google Scholar] [CrossRef]
- Cordea, M.D.; Petriu, D.C.; Petriu, E.M.; Georganas, N.D.; Whalen, T.E. 3-D head pose recovery for interactive virtual reality avatars. IEEE Trans. Instrum. Meas. 2002, 51, 640–644. [Google Scholar] [CrossRef]
- Hoff, W.; Vincent, T. Analysis of head pose accuracy in augmented reality. IEEE Trans. Vis. Comput. Graph. 2000, 6, 319–334. [Google Scholar] [CrossRef]
- Murphy-Chutorian, E.; Trivedi, M.M. Head Pose Estimation and Augmented Reality Tracking: An Integrated System and Evaluation for Monitoring Driver Awareness. IEEE Trans. Intell. Transp. Syst. 2010, 11, 300–311. [Google Scholar] [CrossRef]
- Severin, I.C.; Dobrea, D.M.; Dobrea, M.C. Head Gesture Recognition using a 6DOF Inertial IMU. Int. J. Comput. Commun. Control. 2020, 15, 3856. [Google Scholar] [CrossRef]
- Severin, I.C. Time Series Feature Extraction For Head Gesture Recognition: Considerations Toward HCI Applications. In Proceedings of the 24th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 8–10 October 2020; pp. 232–237. [Google Scholar]
- Severin, I.C. Head Gesture-Based on IMU Sensors: A Performance Comparison Between the Unimodal and Multimodal Approach. In Proceedings of the 2021 International Symposium on Signals, Circuits and Systems (ISSCS), Daegu, Republic of Korea, 15–16 July 2021; pp. 1–4. [Google Scholar]
- Wong, K.I.; Chen, Y.-C.; Lee, T.-C.; Wang, S.-M. Head Motion Recognition Using a Smart Helmet for Motorcycle Riders. In Proceedings of the 2019 International Conference on Machine Learning and Cybernetics (ICMLC), Kobe, Japan, 7–10 July 2019; pp. 1–7. [Google Scholar]
- Obaid, M.; Hodrob, R.; Abu Mwais, A.; Aldababsa, M. Small vocabulary isolated-word automatic speech recognition for single-word commands in Arabic spoken. Soft Comput. 2023, 1–14. [Google Scholar] [CrossRef]
- Shafie, N.; Azizan, A.; Adam, M.Z.; Abas, H.; Yusof, Y.M.; Ahmad, N.A. Dynamic Time Warping Features Extraction Design for Quranic Syllable-based Harakaat Assessment. Int. J. Adv. Comput. Sci. Appl. 2022, 13, 48–54. [Google Scholar] [CrossRef]
- Xu, J.; Wang, H.; Zhang, J.; Cai, L. Robust Hand Gesture Recognition Based on RGB-D Data for Natural Human-Computer Interaction. IEEE Access 2022, 10, 54549–54562. [Google Scholar] [CrossRef]
- Tuncer, E.; Unlu, M.Z. Handwriting recognition by derivative dynamic time warping methodology via sensor-based gesture recognition. Maejo Int. J. Sci. Technol. 2022, 16, 72–88. [Google Scholar]
- Peixoto, J.S.; Cukla, A.R.; Cuadros, M.A.; Welfer, D.; Gamarra, D.F. Gesture Recognition using FastDTW and Deep Learning Methods in the MSRC-12 and the NTU RGB plus D Databases. IEEE Lat. Am. Trans. 2022, 20, 2189–2195. [Google Scholar] [CrossRef]
- Mavuş, U.; Sezer, V. Head Gesture Recognition via Dynamic Time Warping and Threshold Optimization. In Proceedings of the 2017 IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA), Savannah, GA, USA, 27–31 March 2017. [Google Scholar]
- Hachaj, T.; Piekarczyk, M. Evaluation of Pattern Recognition Methods for Head Gesture-Based Interface of a Virtual Reality Helmet Equipped with a Single IMU Sensor. Sensors 2019, 19, 5408. [Google Scholar] [CrossRef] [PubMed]
- Hachaj, T.; Ogiela, M.R. Head Motion Classification for Single-Accelerometer Virtual Reality Hardware. In Proceedings of the 2019 5th International Conference on Frontiers of Signal Processing (ICFSP), Marseille, France, 18–20 September 2019; pp. 45–49. [Google Scholar]
- Rudigkeit, N.; Gebhard, M. AMiCUS 2.0-System Presentation and Demonstration of Adaptability to Personal Needs by the Example of an Individual with Progressed Multiple Sclerosis. Sensors 2020, 20, 1194. [Google Scholar] [CrossRef] [PubMed]
- Dey, P.; Hasan, M.M.; Mostofa, S.; Rana, A.I. Smart wheelchair integrating head gesture navigation. In Proceedings of the 2019 International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), Dhaka, Bangladesh, 10–12 January 2019; pp. 329–334. [Google Scholar]
- Dobrea, M.-C.; Dobrea, D.-M.; Severin, I.-C. A new wearable system for head gesture recognition designed to control an intelligent wheelchair. In Proceedings of the 2019 E-Health and Bioengineering Conference (EHB), Iasi, Romania, 21–23 November 2019; pp. 1–5. [Google Scholar]
- Yang, X.; Wang, X.; Dong, G.; Yan, Z.; Srivastava, M.; Hayashi, E.; Zhang, Y. Headar: Sensing Head Gestures for Confirmation Dialogs on Smartwatches with Wearable Millimeter-Wave Radar. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2023, 7, 138. [Google Scholar] [CrossRef]
- Kapoor, A.; Rosalind, W.P. A real-time head nod and shake detector. In Proceedings of the 2001 Workshop on Perceptive User Interfaces, Orlando, FL, USA, 15–16 November 2001; pp. 1–5. [Google Scholar]
- Fujie, S.; Ejiri, Y.; Nakajima, K.; Matsusaka, Y.; Kobayashi, T. A conversation robot using head gesture recognition as para-linguistic information. In Proceedings of the RO-MAN 2004, 13th IEEE International Workshop on Robot and Human Interactive Communication (IEEE Catalog No.04TH8759), Kurashiki, Japan, 22 September 2004; pp. 159–164. [Google Scholar]
- Wei, H.; Scanlon, P.; Li, Y.; Monaghan, D.S.; O’Connor, N.E. Real-time head nod and shake detection for continuous human affect recognition. In Proceedings of the 2013 14th International Workshop on Image Analysis for Multimedia Interactive Services (WIAMIS), Paris, France, 3–5 July 2013; pp. 1–4. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
| Head Movement Types | Number of Training Samples | Number of Testing Samples |
|---|---|---|
| Nodding | 293 | 67 |
| Tilting up | 317 | 69 |
| Shaking left | 326 | 64 |
| Shaking right | 302 | 71 |
| Tilting left | 337 | 80 |
| Tilting right | 339 | 68 |
| Total | 1914 | 419 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Hidden layer | 2 | Loss function | Cross entropy |
| Number of hidden layers, 1 unit | 200 | Learning rate | 0.0001 |
| Number of hidden layers, 2 units | 100 | Batch size | 128 |
| Maximum number of iterations | 1000 | The initialization method of batch size weights | Orthogonal initialization |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Hu, H. Head Gesture Recognition Combining Activity Detection and Dynamic Time Warping. J. Imaging 2024, 10, 123. https://doi.org/10.3390/jimaging10050123
Li H, Hu H. Head Gesture Recognition Combining Activity Detection and Dynamic Time Warping. Journal of Imaging. 2024; 10(5):123. https://doi.org/10.3390/jimaging10050123
Chicago/Turabian StyleLi, Huaizhou, and Haiyan Hu. 2024. "Head Gesture Recognition Combining Activity Detection and Dynamic Time Warping" Journal of Imaging 10, no. 5: 123. https://doi.org/10.3390/jimaging10050123
APA StyleLi, H., & Hu, H. (2024). Head Gesture Recognition Combining Activity Detection and Dynamic Time Warping. Journal of Imaging, 10(5), 123. https://doi.org/10.3390/jimaging10050123